Synchronization Full-Order Terminal Sliding Mode Control for an Uncertain 3-DOF Planar Parallel Robotic Manipulator



1
The University of Danang—University of Science and Technology, 54 Nguyen Luong Bang street, Danang 550000, Vietnam
2
Electrical and Electronic Engineering department, The University of Danang—University of Technology and Education, Danang 550000, Vietnam
*
Author to whom correspondence should be addressed.
Appl. Sci. 2019, 9(9), 1756; https://doi.org/10.3390/app9091756
Submission received: 31 January 2019
/
Revised: 12 April 2019
/
Accepted: 22 April 2019
/
Published: 27 April 2019
(This article belongs to the Special Issue The Application of Sliding Mode Control in Robots)
Abstract
:Featured Application
The proposed control method could be applied to not only the joint position tracking control for parallel robotic manipulators but also other mechanical systems such as the position synchronization control of multiple motion axes, mobile robotics, and serial robotic manipulators.
Abstract
The control of a parallel robotic manipulator with uncertain dynamics is a noteworthy challenge due to the complicated dynamic model; multi-closed-loop chains; and singularities. This study develops a Synchronization Full-Order Terminal Sliding Mode Control (S-FOTSMC) for a 3-DOF planar parallel robotic manipulator with uncertain dynamics. First, to achieve faster convergence of position error and synchronization error variables with minimum values at the same time, a Synchronization Full-Order Terminal Sliding Mode Surface (S-FOTSMS) is constructed in the cross-coupling error’s state space. Next; an integral of the switching control term is applied; that means, a continuous control term is extended for rejecting the effects of chattering. Finally, an SFOTSMC is designed to guarantee that sliding mode motion will occur. Consequently, the stability and the robustness of the proposed method are secured with high-performance irrespective of the influences of uncertain terms in the robot system. The simulation performances show the effectiveness of our proposed system for position tracking control of a 3-DOF planar parallel robotic manipulator.
1. Introduction
Robot manipulators have contributed endless roles in both the industrial automation systems and applied research fields. Recently, studies on parallel robots have attracted a lot of interest in the research community. This is because parallel manipulators have numerous highlighted benefits such as high speed, high stiffness, high-accuracy positioning, high payload capacity and low moving inertia. Parallel manipulators have widely applied in real applications, including precise manufacturing, medical science, humanoid robots, space exploration equipment, and automobile simulators [1]. However, a drawback of parallel robotic manipulators is their limited workspace, especially compared with serial manipulators. Moreover, parallel robotic manipulators are saddled with a complicated dynamic model, singularities, and the forward kinematic problem. Therefore, many field-specific trials are needed to thoroughly handle these disadvantages of parallel robotic manipulators. The path tracking control is then considered for a representative analysis to confirm the effectiveness of the proposed control systems.
As reported in the literature, several control methods have been successfully applied to control robot manipulators. Outstanding examples, such as the proportional-integral-derivative (PID) controller [2], Nonlinear PD synchronized control [3], the adaptive switching learning PD control method (ASL-PD) [4], or [5] were reported to control the motion of parallel manipulators. However, these control systems cannot always obtain a prescribed performance due to the presence of external disturbances and uncertainties. Next, numerous advanced control algorithms were introduced, such as the computed torque controllers (CTC) [6,7,8], adaptive controllers [9,10,11,12], the model-based iterative learning controller [13], and sliding mode control (SMC) [14,15,16,17,18,19,20,21,22,23,24,25]. The common property of those controllers is that only local feedback information of each joint will be provided to the control loop of each private actuator without any feedback information from other joints. Therefore, errors generated by external disturbances and dynamic uncertainties in the control loop of each actuator are fixed by this control loop, while other errors do not respond. Additionally, the end-effector trajectory of a parallel robot is driven by all actuators synchronously. For this reason, all joints of the parallel robot should be synchronously driven to improve performance.
Recently, studies on the synchronization control of parallel robots have been widely performed. The synchronization controller considers kinematic coupling among the active joints of a parallel robot. Consequently, the tracking performance of the end-effector is enhanced significantly. The synchronization control algorithm was first reported in Reference [26]. This control method has extensively enhanced in References [27,28] and tracking control for parallel robots [5,29,30,31,32].
Nonsingular Fast Terminal Sliding mode control (NFTSMC) is one of the most powerful approaches to solving nonlinear systems with uncertain dynamic terms. NFTSMC well handles the disadvantages of both conventional SMC and conventional terminal sliding mode control (TSMC), such as singularity, undefined time convergence, chattering, and slow convergence. NFTSMC has been successfully applied to serial manipulators and parallel manipulators [18,33,34,35,36,37,38,39,40]. With NFTSMC, the system states not only achieve fast convergence but also avoids the singularity problem. However, NFTSMC also does not consider kinematic coupling among the active joints of a parallel robot to design the control system. Furthermore, the control input signals of NFTSMC still have chattering by using high-frequency control law. To remove chattering, some effective algorithms were suggested. For example, the Boundary Layer Approach (BLA) [22,41,42], High-Order Sliding Mode Control (HOSMC) [43,44,45,46], Full-Order Sliding Mode Control (FOSMC) [47,48,49,50], and Fuzzy-Sliding Mode Control (F-SMC) [51,52,53,54]. Among these controllers, FOSMC not only effectively removes chattering, but also inherits the advantages of NFTSMC, such as non-singularity, fast convergence, robustness against uncertain terms, and high accuracy.
Consequently, the main goal of our study is to propose a new S-FOTSMC for a 3-DOF planar parallel robotic manipulator with uncertain dynamics which has the following benefits: (1) inherits the advantages of the synchronization control and FOTSMC in terms of robustness, fast convergence of position and synchronization errors, singularity removal, and high tracking accuracy; (2) the accuracy in the trajectory tracking control was further improved; (3) all joints of the parallel robot are synchronously driven; (4) the control input system is smooth with minimum chattering.
The rest of this study is arranged as follows. The problem formulations are depicted in Section 2. Section 3 describes the proposed method synthesis. Following Section 3, the proposed control controller is utilized to allow the trajectory tracking control simulation for a 3-DOF parallel robot in Section 4. After its trajectory tracking performance is compared with those of the SMC, the S-SMC and NFTSMC, Section 5 summarizes some highlighted conclusions.
2. Problem Formulations
2.1. Dynamic Model of Parallel Robot Manipulator
The general dynamic equation for a 3-DOF parallel robotic manipulator is depicted as in References [55,56]:
where , , and are the position vector, velocity vector, and acceleration vector at each active joint, respectively. represents the real inertia matrix and represents the real Coriolis and centrifugal force matrix. represents the estimated inertia matrix and represents the estimated Coriolis and centrifugal force matrix. and are the friction vector and disturbance vector at the active joints, respectively. and are the errors of the real dynamic model. The detail elements of , , and can be found in Reference [55].
Consequently, the real dynamic equation of the 3-DOF parallel robot manipulator is achieved as
The vector of the lumped uncertain terms from Equation (2) is stated as follows:
Accordingly, the robot dynamic Equation (1) is rewritten with the following expression:
where .
The control objective of this research is to further increase the precision in the path tracking control for an uncertain 3-DOF parallel robotic manipulator (Equations (1) or (4)) such that the position tracking errors and synchronization errors can approach zero at the same time, regardless of the influences of uncertain dynamics in the robotic system.
In order to obtain this control objective, the cross-coupling errors will be used to design the sliding surfaces and develop the proposed control system.
Assumption 1.
The lumped uncertain terms are a limited function, which needs to satisfy the constrained condition:
where is a known positive constant, that is, the first-order differentiable.
2.2. Definition of Synchronization Error Cross-Coupling Error
In synchronization control, there are two error types, and they are called the synchronization error and cross-coupling error. These error types are determined as in Reference [57].
The error of the position tracking on each active joint is calculated as follows:
where denotes the angle of the desired position on each active joint.
In the synchronization matter of the error tracking, the position error of not only achieves zero it but also tunes the motion relationship among multiple active joints during the tracking operation:
where is the position error at the ith joint.
The synchronization errors are defined in the case of three active joints as follows:
where, the vector of synchronization error is . Therefore, the goal of synchronization error can be achieved if for all active joints.
The cross-coupling error was defined as follows:
where is the positive constant, is the variable from time zero, and the vector of cross-coupling errors is .
We define vectors of and .
Then, the first and second derivative of the cross-coupling error can be computed as follows:
3. Design Procedure of Control Scheme
In this section, a novel control algorithm is proposed for the parallel robot as follows.
3.1. Design of S-FOTSMS
To synchronously achieve fast convergence of both the position error and synchronization error along with the robustness rejects the effects of the lumped uncertain terms, the S-FOTSMS is designed by using the cross-coupling error (Equation (9)) as follows:
where are the S-FOTSMS, are the positive constants, which are chosen as in References [47,58,59]. and can be selected such that the polynomial is Hurwitz, i.e., the eigenvalue of the polynomial are all in the left-half side of the complex plane. and can be determined based on the following conditions: , and .
From the second derivative of the cross-coupling error in Equations (11) and (12), we obtain
With the robot dynamic Equation (4), Equation (13) gives
3.2. Design of S-FOTSMC
The following proposed controller is designed to attain the desired tracking performance:
The equivalent control term is designed as follows:
Additionally, the switching control term is designed as follows:
where is a positive constant.
Consequently, the following theorem is created to be stable proof.
Theorem 1.
Consider a 3-DOF parallel robot manipulator (4). If the proposed torque commands are designed for the robot (1) as Equations (15)–(17), then the position error synchronization error speedily converge to zero at the same time. That means the system (4) is guaranteed to have stability.
Proof .
Adopting control inputs (15)–(17) to Equation (14) gives
Taking time derivative of Equation (18) yields:
The following Lyapunov function is defined with the following expression:
With the result of Equation (19), the time derivative of Equation (20) gives
From Equation (21), g is assigned to be greater than zero. Therefore, will be negative. Consequently, according to the Lyapunov theory [60], it is verified that both position error and synchronization error synchronously approach zero under control system (15)–(17) irrespective of the influences of the uncertain terms in the robot system. □
Remark 1.
In the design of the control laws (15)–(17), the design procedure is based on the assumption that the bounded value of G in Assumption 1 can be obtained in advance. However, this parameter is difficult to be obtained in advance in practical engineering applications. In the next work, we use a neural network or an adaptive control law to estimate the bounded value of G in Assumption 1. Therefore, our controller can provide high performance without the requirement of the bounded value of G in Assumption 1.
Remark 2.
The proposed control method could be applied to not only the joint position tracking control for parallel Robot. manipulators but also other mechanical systems such as the position synchronization control of multiple motion axes, mobile Robot.s, serial Robot. manipulators.
4. Numerical Simulation Studies
To confirm the effectiveness of the suggested algorithm, the simulated examples are performed for a 3-DOF planar parallel robot on SOLIDWORKS and the SimMechanics of MATLAB. First, The SOLIDWORKS software was used to construct the parallel manipulator model which has the 3-D computer-aided design (CAD) type. Where each mechanical element of the robot is separately built then linked by the joints. Second, the SimMechanics link plug-in was used to export an XML file of the robot mode. Then, this XML file is imported to Simulink. Therefore, the CAD assembly is of geometry files and linked the main body in SimMechanics. Third, sensors, joint actuators were set up to the mechanical system, and external disturbance and fictions were applied to test robustness. Finally, the torque commands from the control method block were applied to this robot system. The kinematic illustration of the robotic system and its 3D CAD model are shown in Figure 1 and Figure 2, respectively. The robot parameters are stated in Table 1 and the selection parameters of the control algorithms are stated in Table 2. We used MATLAB/SIMULINK software for all numerical simulation studies, solver ode3 (Bogacki-Shampine), and the sampling time was set to 10−3 s.
To analyze the effectiveness of the suggested approach, the approach was applied to a prescribed trajectory tracking control for a 3-DOF planar parallel robotic manipulator, and its tracking results were compared with those of SMC, synchronization SMC (S-SMC), and NFTSMC. These control methods for comparison have been briefly stated in Appendix A, Appendix B and Appendix C.
The simulations were carried out with respect to 2 cases when the parallel manipulator tracks a circular trajectory and a linear trajectory.
Case 1.
The desired trajectory of the end-effector for the position tracking when the parallel manipulator tracks a circular trajectory:
We assume that the effect of the friction force on the passive joints is much smaller than that on the active joints. Thus, in order to simplify the dynamic model, only the friction forces on the active joints are considered. The friction models of the system, including the viscous friction and the Coulomb friction torques, are only assumed to test the robustness of the control system. Because it is difficult to exactly calculate these friction terms, in this paper, we do not measure the physical value of friction. Therefore, the following friction forces at each active joint were modeled:
Figure 3, Figure 4, Figure 5 and Figure 6 show the trajectory position tracking, the tracking errors of the end-effector in the X-direction and in the Y-direction, and comparison of tracking errors in active joint space, respectively. Synchronization errors and cross-coupling errors in active joint space are shown in Figure 7. The end-effector of the manipulator has the initial position as and this end-effector is driven to follow a circular path. It should be noted that the initial positions of the robotic system were selected according to the workspace of the robotic system. That means these initial positions must be satisfied inside the workspace. From Figure 3, Figure 4, Figure 5 and Figure 6 it is seen that the tracking path generated by SMC has the biggest discrepancy compared to the prescribed path; it has the worse tracking result among the four methods. S-SMC and NFTSMC produce better results than SMC but NFTSMC provides better performance and faster error convergence than both S-SMC and SMC. It is noteworthy that the proposed system is developed by applying the combination of synchronization control and FOTSMC. Accordingly, the tracking path generated by the proposed system has the smallest discrepancy compared to the prescribed path, and it has the fastest convergence rate to the prescribed path among the four control methods. From Figure 4, Figure 5 and Figure 6, it is observed that the tracking errors generated by S-SMC are smaller than the tracking errors generated by SMC. However, S-SMC provides a worse tracking error than NFTSMC. Especially since the proposed system provides the smallest tracking errors compared to SMC, NFTSMC and S-SMC. The tracking accuracy under the proposed method has been significantly improved in comparison with NFTSMC and S-SMC.
The control input signals for all control types, including SMC, S-SMC, NFTSMC, and the suggested method are illustrated in Figure 8. From Figure 8, it is clear that SMC, S-SMC, and NFTSMC provide a continuous control signal because these three methods use a BLA to eliminate chattering. However, it is seen that the chattering has not been completely removed in the torque input of the NFTSMC. Additionally, the use of a BLA leads to the reduce robustness and accuracy of the control method. While the suggested method uses an integral of the switching control term to reject chattering without an accuracy reduction.
Case 2.
When the parallel manipulator tracks a linear trajectory.
Figure 9 shows the results of tracking a linear trajectory. From Figure 9, it is seen that the tracking path generated by the proposed system has the smallest discrepancy compared to the prescribed path, and it has the fastest convergence rate to the prescribed path among the four control methods.
Therefore, it is concluded that the suggested method is highly effective for a 3-DOF parallel manipulator in tracking control. The effects of uncertainties and external disturbances have been completely compensated by using the suggested method.
Remark 3.
Through simulation studies comparison among those of SMC, S-SMC, NFTSMC, S-FOTSMC, the experimental results performance comparison could be expected to show the effectiveness viability of our proposed scheme. In the next work, the authors will apply the proposed control method to the practical Robot. system compare them with other state-of-the-art control algorithms to demonstrate the effectiveness of this control method.
5. Conclusions
This work proposed the S-FOTSMC for a 3-DOF planar parallel robot manipulator with an uncertainty dynamic. First, to achieve faster convergence of position and synchronization error variables with minimum values at the same time, the S-FOTSMS is formed in the cross-coupling error’s state space. Next, an integral of the switching control term is applied, that means a continuous control term is extended for rejecting the effects of chattering. Finally, an S-FOTSMC is designed to guarantee that the position tracking errors and synchronization error synchronously attain a zero value. Therefore, the stability and the robustness of the proposed method are secured with high-performance irrespective of the influences of uncertain terms in the robot system. From the simulated performance, it is concluded that the suggested controller is highly effective for a 3-DOF planar parallel robotic manipulator in trajectory tracking control. The effects of uncertainties and external disturbances have been fully compensated by the suggested system.
Author Contributions
All authors have contributed equally to this study and accepted the final report.
Funding
This research was funded by Funds for Science and Technology Development of The University of Danang, Vietnam.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
Design of the SMC
We select the sliding manifold and take its time derivative as follows:
where is a positive constant, are the path tracking errors, are the prescribed trajectories, is the reference velocity vector, and is the reference acceleration vector.
Substituting the robotic Equation (4) into Equation (A1) yields:
Then, to attain the desired tracking performance for parallel robot manipulator (1), the torque command was proposed as in References [61,62]:
The BLA was used to eliminate the chattering in the torque signal. Accordingly, the torque command of Equation (A3) becomes
where and are positive constants, is a saturation vector [62], and is the boundary layer thicknesses.
Appendix B
Design of the S-SMC
Define the synchronization sliding manifold and its time derivative as follows:
where is a positive constant, is the cross-coupling error in Equation (9), is the prescribed trajectory, is the reference velocity vector, and is the reference acceleration vector. and were defined in Equation (9).
Adding the robotic Equation (4) into Equation (A5) gives
Then, to attain the desired tracking performance for the parallel robot manipulator (1), the torque command is designed as in Reference [63]:
The BLA was applied to replace the discontinuous term in the torque command. Hence, the torque command of Equation (A7) becomes
where , and are positive constants, is a saturation vector [62], and are the boundary layer thicknesses.
Appendix C
Design Nonsingular Fast Terminal Sliding Mode Control
The nonsingular fast terminal sliding mode surface is designed as in reference [64]
where are the sliding variables, are the position tracking errors, are the positive constants and , which are chosen as in Reference [64]. In addition, and are defined as in
in which .
Taking time derivative of Equation (A9) yields
Adding the robotic Equation (4) into Equation (A11) gives
The following proposed controller is designed to obtain the desired performance:
The equivalent control term is designed as follows:
Additionally, the switching control term is designed as follows:
The BLA was used to eliminate the chattering in the torque input. Consequently, the torque command of Equation (A13) becomes
where and are positive constants, is a saturation vector [62], and are the boundary layer thicknesses.
References
- Merlet, J.-P. Parallel Robots; Springer Science & Business Media: Berlin, Germany, 2006; Volume 128. [Google Scholar]
- Yang, C.; Han, J.; Peter, O.O.; Huang, Q. PID control with gravity compensation for hydraulic 6-DOF parallel manipulator. In PID Control, Implementation Tuning; TechOpen: Rijeka, Croatia, 2011. [Google Scholar]
- Su, Y.X.; Sun, D.; Ren, L.; Wang, X.; Mills, J.K. Nonlinear PD synchronized control for parallel manipulators. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation (ICRA), Barcelona, Spain, 18–22 April 2005; pp. 1374–1379. [Google Scholar]
- Ouyang, P.R.; Zhang, W.J.; Gupta, M.M. An adaptive switching learning control method for trajectory tracking of robot manipulators. Mechatronics 2006, 16, 51–61. [Google Scholar] [CrossRef]
- Su, Y.; Sun, D.; Ren, L.; Mills, J.K. Integration of saturated PI synchronous control and PD feedback for control of parallel manipulators. IEEE Trans. Robot. 2006, 22, 202–207. [Google Scholar]
- Yang, Z.; Wu, J.; Mei, J. Motor-mechanism dynamic model based neural network optimized computed torque control of a high speed parallel manipulator. Mechatronics 2007, 17, 381–390. [Google Scholar] [CrossRef]
- Le, T.D.; Kang, H.-J.; Suh, Y.-S.; Ro, Y.-S. An online self-gain tuning method using neural networks for nonlinear PD computed torque controller of a 2-dof parallel manipulator. Neurocomputing 2013, 116, 53–61. [Google Scholar] [CrossRef]
- Shang, W.; Cong, S. Nonlinear computed torque control for a high-speed planar parallel manipulator. Mechatronics 2009, 19, 987–992. [Google Scholar] [CrossRef]
- Zhu, X.; Tao, G.; Yao, B.; Cao, J. Adaptive robust posture control of parallel manipulator driven by pneumatic muscles with redundancy. IEEE/ASME Trans. Mechatron. 2008, 13, 441–450. [Google Scholar]
- Ryu, J.-H.; Song, J.; Kwon, D.-S. A nonlinear friction compensation method using adaptive control and its practical application to an in-parallel actuated 6-DOF manipulator. Control Eng. Pract. 2001, 9, 159–167. [Google Scholar] [CrossRef]
- Zhu, X.; Tao, G.; Yao, B.; Cao, J. Adaptive robust posture control of a parallel manipulator driven by pneumatic muscles. Automatica 2008, 44, 2248–2257. [Google Scholar] [CrossRef]
- Honegger, M.; Brega, R.; Schweiter, G. Application of a nonlinear adaptive controller to a 6 dof parallel manipulator. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA’00), San Francisco, CA, USA, 24–28 April 2000; Volume 2, pp. 1930–1935. [Google Scholar]
- Abdellatif, H.; Heimann, B. Advanced model-based control of a 6-DOF hexapod robot: A case study. IEEE/ASME Trans. Mechatron. 2010, 15, 269–279. [Google Scholar] [CrossRef]
- Moreno, J.A.; Negrete, D.Y.; Torres-González, V.; Fridman, L. Adaptive continuous twisting algorithm. Int. J. Control 2016, 89, 1798–1806. [Google Scholar] [CrossRef]
- Vo, A.T.; Kang, H.-J.; Le, T.D. An Adaptive Fuzzy Terminal Sliding Mode Control Methodology for Uncertain Nonlinear Second-Order Systems. In Proceedings of the International Conference on Intelligent Computing, Bengaluru, India, 25–27 October 2018; pp. 123–135. [Google Scholar]
- Qi, Z.; McInroy, J.E.; Jafari, F. Trajectory tracking with parallel robots using low chattering, fuzzy sliding mode controller. J. Intell. Robot. Syst. 2007, 48, 333–356. [Google Scholar] [CrossRef]
- Guo, H.; Liu, Y.; Liu, G.; Li, H. Cascade control of a hydraulically driven 6-DOF parallel robot manipulator based on a sliding mode. Control Eng. Pract. 2008, 16, 1055–1068. [Google Scholar] [CrossRef]
- Vo, A.T.; Kang, H.-J. An Adaptive Neural Non-Singular Fast-Terminal Sliding-Mode Control for Industrial Robotic Manipulators. Appl. Sci. 2018, 8, 2562. [Google Scholar] [CrossRef]
- Yang, J.; Li, S.; Yu, X. Sliding-mode control for systems with mismatched uncertainties via a disturbance observer. IEEE Trans. Ind. Electron. 2013, 60, 160–169. [Google Scholar] [CrossRef]
- Edwards, C.; Spurgeon, S. Sliding Mode Control: Theory Applications; CRC Press: Boca Raton, FL, USA, 1998. [Google Scholar]
- Zhang, M.; Ma, X.; Song, R.; Rong, X.; Tian, G.; Tian, X.; Li, Y. Adaptive proportional-derivative sliding mode control law with improved transient performance for underactuated overhead crane systems. IEEE/CAA J. Autom. Sin. 2018, 5, 683–690. [Google Scholar] [CrossRef]
- Utkin, V. Discussion aspects of high-order sliding mode control. IEEE Trans. Autom. Control 2016, 61, 829–833. [Google Scholar] [CrossRef]
- Islam, S.; Liu, X.P. Robust sliding mode control for robot manipulators. IEEE Trans. Ind. Electron. 2011, 58, 2444–2453. [Google Scholar] [CrossRef]
- Yang, B.; Yu, T.; Shu, H.; Dong, J.; Jiang, L. Robust sliding-mode control of wind energy conversion systems for optimal power extraction via nonlinear perturbation observers. Appl. Energy 2018, 210, 711–723. [Google Scholar] [CrossRef]
- Kamal, S.; Moreno, J.A.; Chalanga, A.; Bandyopadhyay, B.; Fridman, L.M. Continuous terminal sliding-mode controller. Automatica 2016. [Google Scholar] [CrossRef]
- Koren, Y. Cross-coupled biaxial computer control for manufacturing systems. J. Dyn. Syst. Meas. Control 1980, 102, 265–272. [Google Scholar] [CrossRef]
- Li, Y.; Zheng, Q.; Yang, L. Design of robust sliding mode control with disturbance observer for multi-axis coordinated traveling system. Comput. Math. Appl. 2012, 64, 759–765. [Google Scholar] [CrossRef]
- Cheng, M.H.; Li, Y.J.; Bakhoum, E.G. Controller synthesis of tracking and synchronization for multiaxis motion system. IEEE Trans. Control Syst. Technol. 2014, 22, 378–386. [Google Scholar] [CrossRef]
- Ren, L.; Mills, J.K.; Sun, D. Experimental comparison of control approaches on trajectory tracking control of a 3-DOF parallel robot. IEEE Trans. Control Syst. Technol. 2007, 15, 982–988. [Google Scholar] [CrossRef]
- Ren, L.; Mills, J.K.; Sun, D. Adaptive synchronized control for a planar parallel manipulator: Theory and experiments. J. Dyn. Syst. Meas. Control 2006, 128, 976–979. [Google Scholar] [CrossRef]
- Ren, L.; Mills, J.K.; Sun, D. Trajectory tracking control for a 3-DOF planar parallel manipulator using the convex synchronized control method. IEEE Trans. Control Syst. Technol. 2008, 16, 613–623. [Google Scholar] [CrossRef]
- Sun, D.; Lu, R.; Mills, J.K.; Wang, C. Synchronous tracking control of parallel manipulators using cross-coupling approach. Int. J. Robot. Res. 2006, 25, 1137–1147. [Google Scholar] [CrossRef]
- Tuan, V.A.; Kang, H.-J. A New Finite-time Control Solution to The Robotic Manipulators Based on The Nonsingular Fast Terminal Sliding Variables and Adaptive Super-Twisting Scheme. J. Comput. Nonlinear Dyn. 2019, 14, 031002. [Google Scholar] [CrossRef]
- Zhang, F. High-speed nonsingular terminal switched sliding mode control of robot manipulators. IEEE/CAA J. Autom. Sin. 2017, 4, 775–781. [Google Scholar] [CrossRef]
- Vo, A.T.; Kang, H. An Adaptive Terminal Sliding Mode Control for Robot Manipulators with Non-singular Terminal Sliding Surface Variables. IEEE Access 2018, 8701–8712. [Google Scholar] [CrossRef]
- Vo, A.T.; Kang, H. A Chattering-Free, Adaptive, Robust Tracking Control Scheme for Nonlinear Systems with Uncertain Dynamics. IEEE Access 2019, 10457–10466. [Google Scholar] [CrossRef]
- Zhao, D.; Li, S.; Gao, F. Finite time position synchronised control for parallel manipulators using fast terminal sliding mode. Int. J. Syst. Sci. 2009, 40, 829–843. [Google Scholar] [CrossRef]
- Zhao, D.; Li, S.; Gao, F.; Zhu, Q. Robust adaptive terminal sliding mode-based synchronised position control for multiple motion axes systems. IET Control Theory Appl. 2009, 3, 136–150. [Google Scholar] [CrossRef]
- Van, M.; Ge, S.S.; Ren, H. Finite time fault tolerant control for robot manipulators using time delay estimation and continuous nonsingular fast terminal sliding mode control. IEEE Trans. Cybern. 2017, 47, 1681–1693. [Google Scholar] [CrossRef] [PubMed]
- Van, M.; Mavrovouniotis, M.; Ge, S.S. An Adaptive Backstepping Nonsingular Fast Terminal Sliding Mode Control for Robust Fault Tolerant Control of Robot Manipulators. IEEE Trans. Syst., Man Cybern. Syst. 2018, 99, 1–11. [Google Scholar] [CrossRef]
- Edelbaher, G.; Jezernik, K.; Urlep, E. Low-speed sensorless control of induction machine. IEEE Trans. Ind. Electron. 2006, 53, 120–129. [Google Scholar] [CrossRef]
- Li, H.; Dou, L.; Su, Z. Adaptive nonsingular fast terminal sliding mode control for electromechanical actuator. Int. J. Syst. Sci. 2013, 44, 401–415. [Google Scholar] [CrossRef]
- Van, M.; Franciosa, P.; Ceglarek, D. Fault diagnosis and fault-tolerant control of uncertain robot manipulators using high-order sliding mode. Math. Probl. Eng. 2016, 2016. [Google Scholar] [CrossRef]
- Van, M.; Ge, S.S.; Ren, H. Robust fault-tolerant control for a class of second-order nonlinear systems using an adaptive third-order sliding mode control. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 221–228. [Google Scholar] [CrossRef]
- Levant, A. Higher-order sliding modes, differentiation and output-feedback control. Int. J. Control 2003, 76, 924–941. [Google Scholar] [CrossRef]
- Rubio-Astorga, G.; Sánchez-Torres, J.D.; Cañedo, J.; Loukianov, A.G. High-order sliding mode block control of single-phase induction motor. IEEE Trans. Control Syst. Technol. 2014, 22, 1828–1836. [Google Scholar] [CrossRef]
- Feng, Y.; Han, F.; Yu, X. Chattering free full-order sliding-mode control. Automatica 2014, 50, 1310–1314. [Google Scholar] [CrossRef]
- Feng, Y.; Zhou, M.; Zheng, X.; Han, F.; Yu, X. Full-order terminal sliding-mode control of MIMO systems with unmatched uncertainties. J. Frankl. Inst. 2018, 355, 653–674. [Google Scholar] [CrossRef]
- Song, Z.; Duan, C.; Wang, J.; Wu, Q. Chattering-free full-order recursive sliding mode control for finite-time attitude synchronization of rigid spacecraft. J. Frankl. Inst. 2019, 356, 998–1020. [Google Scholar] [CrossRef]
- Xiang, X.; Liu, C.; Su, H.; Zhang, Q. On decentralized adaptive full-order sliding mode control of multiple UAVs. ISA Trans. 2017, 71, 196–205. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Wang, J.; Wu, L.; Lam, H.-K.; Gao, Y. Optimal Guaranteed Cost Sliding-Mode Control of Interval Type-2 Fuzzy Time-Delay Systems. IEEE Trans. Fuzzy Syst. 2018, 26, 246–257. [Google Scholar] [CrossRef]
- Roopaei, M.; Jahromi, M.Z. Chattering-free fuzzy sliding mode control in MIMO uncertain systems. Nonlinear Anal. Theory Methods Appl. 2009, 71, 4430–4437. [Google Scholar] [CrossRef]
- Van, M. An Enhanced Robust Fault Tolerant Control Based on an Adaptive Fuzzy PID-Nonsingular Fast Terminal Sliding Mode Control for Uncertain Nonlinear Systems. IEEE/ASME Trans. Mechatron. 2018, 23, 1362–1371. [Google Scholar] [CrossRef]
- Duc, T.M.; Van Hoa, N.; Dao, T.-P. Adaptive fuzzy fractional-order nonsingular terminal sliding mode control for a class of second-order nonlinear systems. J. Comput. Nonlinear Dyn. 2018, 13, 31004. [Google Scholar] [CrossRef]
- Doan, Q.V.; Le, T.D.; Le, Q.D.; Kang, H.-J. A neural network--based synchronized computed torque controller for three degree-of-freedom planar parallel manipulators with uncertainties compensation. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418767307. [Google Scholar] [CrossRef]
- Le, T.D.; Kang, H.-J. An adaptive tracking controller for parallel robotic manipulators based on fully tuned radial basic function networks. Neurocomputing 2014, 137, 12–23. [Google Scholar] [CrossRef]
- Sun, D. Synchronization Control of Multiagent Systems; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Bhat, S.P.; Bernstein, D.S. Geometric homogeneity with applications to finite-time stability. Math. Control Signals Syst. 2005, 17, 101–127. [Google Scholar] [CrossRef]
- Bhat, S.P.; Bernstein, D.S. Continuous finite-time stabilization of the translational and rotational double integrators. IEEE Trans. Autom. Control 1998, 43, 678–682. [Google Scholar] [CrossRef]
- Polyakov, A.; Fridman, L. Stability notions and Lyapunov functions for sliding mode control systems. J. Frankl. Inst. 2014, 351, 1831–1865. [Google Scholar] [CrossRef]
- Le, T.D.; Kang, H.-J.; Suh, Y.-S. Chattering-free neuro-sliding mode control of 2-DOF planar parallel manipulators. Int. J. Adv. Robot. Syst. 2013, 10, 22. [Google Scholar] [CrossRef]
- Slotine, J.-J.E.; Li, W. Applied Nonlinear Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1991; Volume 199. [Google Scholar]
- Le, T.D.; Doan, Q.V. Fuzzy Adaptive Synchronized Sliding Mode Control of Parallel Manipulators. In Proceedings of the 4th International Conference on Mechatronics Robotics Engineering, Valenciennes, France, 7–11 February 2018; pp. 102–107. [Google Scholar]
- Yang, L.; Yang, J. Nonsingular fast terminal sliding-mode control for nonlinear dynamical systems. Int. J. Robust Nonlinear Control 2011, 21, 1865–1879. [Google Scholar] [CrossRef]
Figure 1.
The kinematic illustration of the robotic system.
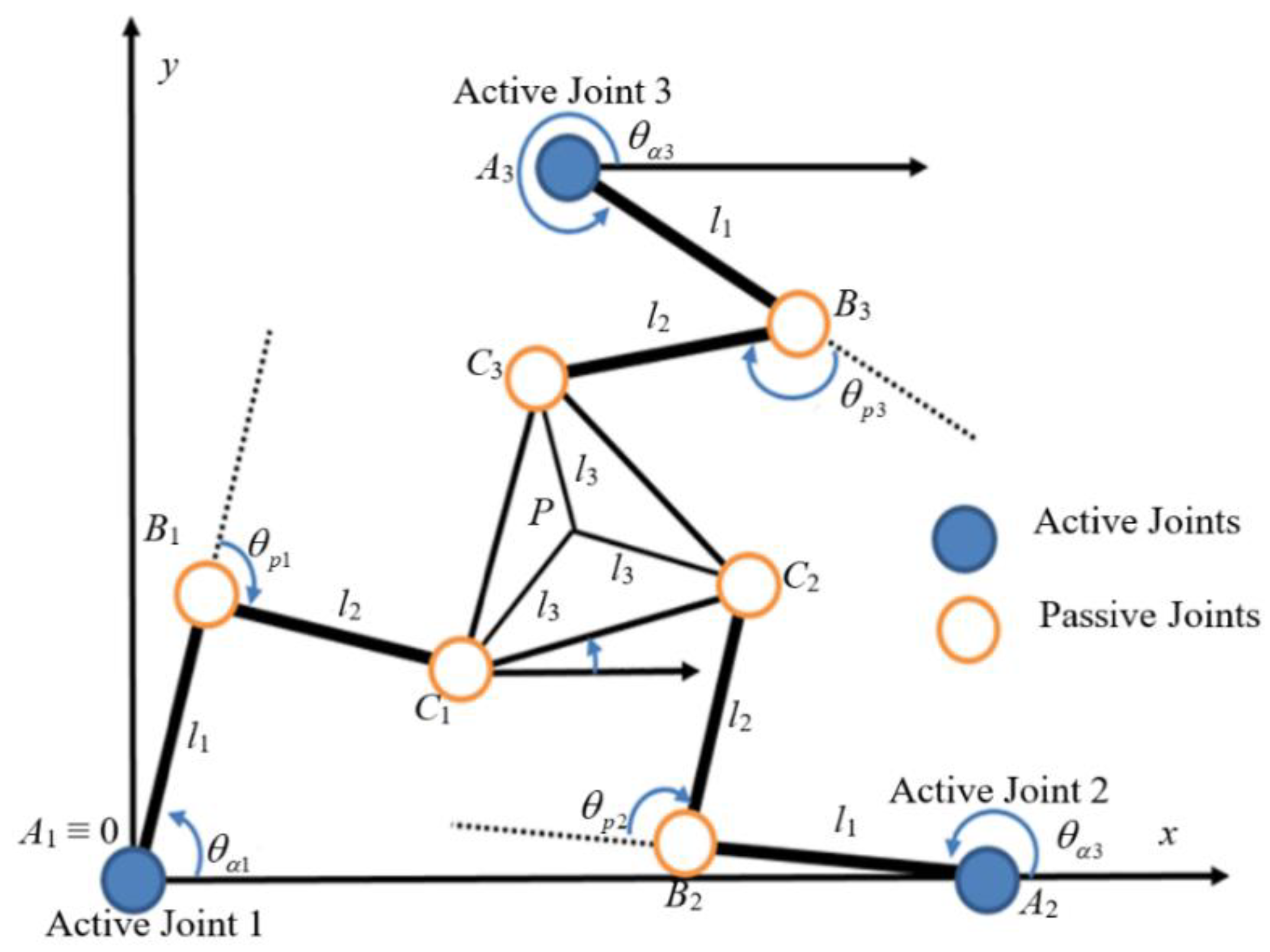
Figure 2.
The 3D CAD model of the parallel manipulator.

Figure 3.
The desired trajectory and real trajectory of the end-effector when the parallel manipulator tracks a circular trajectory.
Figure 3.
The desired trajectory and real trajectory of the end-effector when the parallel manipulator tracks a circular trajectory.

Figure 4.
The tracking errors of the end-effector in the X-direction.

Figure 5.
The tracking errors of the end-effector in the Y-direction.

Figure 6.
The tracking errors in the active joint space (a) at Joint 1, (b) at Joint 2, and (c) at Joint 3.
Figure 6.
The tracking errors in the active joint space (a) at Joint 1, (b) at Joint 2, and (c) at Joint 3.

Figure 7.
The Synchronization Error and Cross-Coupling Error in the active joint space (a) at Joint 1, (b) at Joint 2, and (c) at Joint 3.
Figure 7.
The Synchronization Error and Cross-Coupling Error in the active joint space (a) at Joint 1, (b) at Joint 2, and (c) at Joint 3.

Figure 8.
The control input signals: (a) SMC, (b) S-SMC, (c) NFTSMC, and (d) S-FOTSMC.

Figure 9.
The desired trajectory and real trajectory of the end-effector when the parallel manipulator tracks a linear trajectory.
Figure 9.
The desired trajectory and real trajectory of the end-effector when the parallel manipulator tracks a linear trajectory.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
The robot parameters.
| Robot Parameters | Description | Value | Unit |
|---|---|---|---|
| The lower part length of each leg | 0.4 | m | |
| The upper part length of each leg | 0.6 | m | |
| The dimension of the motion platform | 0.2 | m | |
| Distance from the joint to the mass center of each lower leg | 0.2 | m | |
| Distance from the joint to the mass center of each upper leg | 0.3 | m | |
| Mass of each lower leg | 5.12 | kg | |
| Mass of each upper leg | 7.39 | kg | |
| Mass of the motion platform | 3.84 | kg | |
| Inertia moment of the lower of ith leg | 91 × 10−3 | kg·m2 | |
| Inertia moment of the upper of ith leg | 267 × 10−3 | kg·m2 | |
| Inertia moment of the motion platform | 65 × 10−3 | kg·m2 |
Table 2.
The parameters of the control algorithms.
| Control Algorithm | Control Parameters | Control Parameter Values |
|---|---|---|
| SMC | ||
| S-SMC | ||
| NFTSMC | ||
| S-FOTSMC |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Doan, Q.V.; Le, T.D.; Vo, A.T. Synchronization Full-Order Terminal Sliding Mode Control for an Uncertain 3-DOF Planar Parallel Robotic Manipulator. Appl. Sci. 2019, 9, 1756. https://doi.org/10.3390/app9091756
AMA Style
Doan QV, Le TD, Vo AT. Synchronization Full-Order Terminal Sliding Mode Control for an Uncertain 3-DOF Planar Parallel Robotic Manipulator. Applied Sciences. 2019; 9(9):1756. https://doi.org/10.3390/app9091756
Chicago/Turabian StyleDoan, Quang Vinh, Tien Dung Le, and Anh Tuan Vo. 2019. "Synchronization Full-Order Terminal Sliding Mode Control for an Uncertain 3-DOF Planar Parallel Robotic Manipulator" Applied Sciences 9, no. 9: 1756. https://doi.org/10.3390/app9091756
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.