1. Introduction
The dismantling of a nuclear power plant (NPP) at the end of its life is an important issue. Among 160 NPP, nineteen of them have already been dismantled, and around one hundred are still under the process of dismantling [
1,
2,
3]. The dismantling process has many stages. Among these, the complete dismantling of the structure and technical equipment, the gathering and storing of waste products, and the transportation of these items and the disposal of radioactive material in a controlled and safe environment are the most important. Automative/Tele-operated equipment/robot systems can play an important role in such scenarios. Past statistics show that several dismantling facilities based on robotic systems have worked well [
4]. Thus, research is required to improve this technology in order to carry out the dismantling process efficiently.
The remote handling of a system/plant can be divided into several subcategories depending upon the application. For example, cutting requirements/equipment, segmentation, de-contamination of area/building, sampling, and utilization of remote systems [
5,
6,
7,
8,
9,
10,
11,
12]. France has developed a robotic system to dismantle nuclear power plants called the Maestro-robot-system [
13,
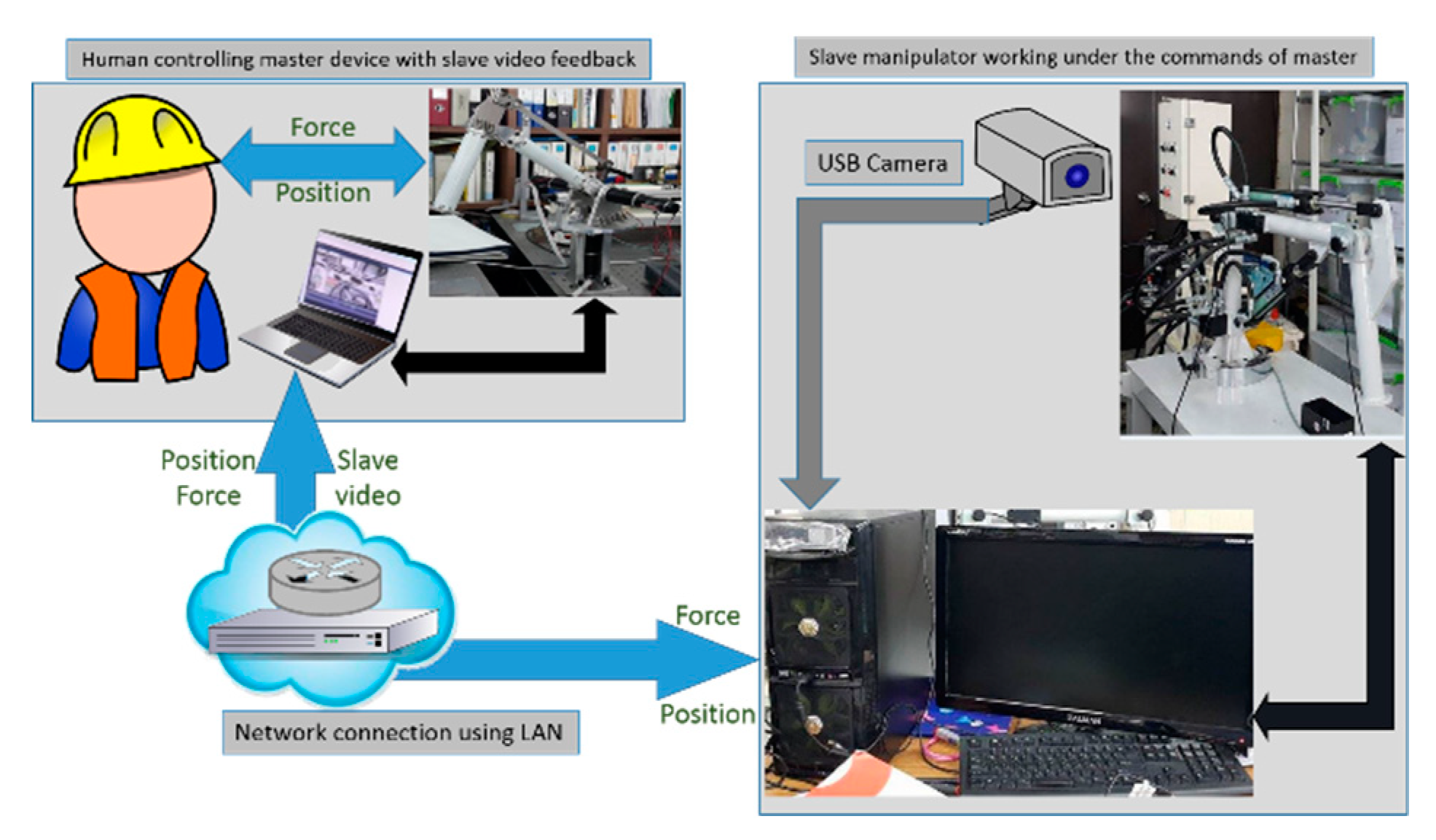
14]. Some researchers have proposed the use of tele-operated systems for performing such activities. Tele-operated systems in nuclear environments provide the operator only with visual feedback in order to get a sense of the reality of the working environment by using existing technologies. In tele-operated tasks, a controller is designed for a patched-up master and slave system. It controls the information flow accordingly. This methodology is also known as bilateral control activity. Several research groups have previously published articles on bilateral control strategies [
15,
16,
17,
18]. Two-channel architectures in bilateral control are the most popular. Force/force (F-F), position/position (P-P), position/force (P-F) and force/position (F-P) architecture designs are all two-channel architectures. Several other studies have also presented 3- or 4-channel architecture design for such activities [
15,
16,
17,
18]. Some of them have also discussed recent advancements in architectural design, controller performance, etc. [
19,
20]. Farooq et al. [
21] proposed a design for a bilateral controller for application in non-linear tele-operated systems.
In [
22], the authors presented an idea for a finite time problem for bilateral control strategies. A tele-operated system was considered in this study, and an output-feedback approach was implemented. Su et al. [
23] proposed an adaptive back stepping control strategy for the slave system, whereas the master system was controlled by designing a robust controller. KD et al. [
24] utilized a sliding mode control scheme with sliding perturbation observer (SMCSPO) to determine the reaction force for a three-link robotic manipulator. An interesting design for a joystick controller for bilateral tele-operated tasks was presented by Truong et al. [
25]. The authors studied the results for application in construction machinery. The control strategy was based upon force-reflective gain in a master/slave system. A similar study for bilateral tele-operated tasks using underactuated mechanical systems was presented by Mejia et al. [
26]. Mellah et al. [
27] proposed the idea of utilizing adaptive neural fuzzy controllers with additional compensatory fuzzy control for a master/slave system. A force-position scheme was chosen, with an architecture based upon a two-channel bilateral tele-operative task. This strategy incorporates the localization of the slave device and the force reflection of master device. Xu et al. [
28] discussed stability and transparency in the case of communication delays. They implemented a model-mediated tele-operative scheme.
Liu et al. [
29] presented a unique and novel idea whereby the remote controller was not co-located with the manipulator device. The authors further analyzed stability and transparency. They discussed two difficult cases: one for fixed time delays, and the other for variable time delays. For the first case, a PD-like controller was chosen, while for the second case, a P-like controller was adopted. Abut et al. [
30] presented a study involving a bilateral tele-operative task for a master/slave device and one virtual device. The localization and velocity control were proposed for the tele-operative task, with a specially designed visual interface for ease of use. The stability of the design was analyzed using the conventional Lyapunov strategy. Islam et al. [
31] discussed the shared-tele-operative robotic system with un-symmetric variable delays. They implemented a robust control scheme based on state and impedance reflection. Additionally, they proposed an adaptive approach for determining interaction properties between the operator and the master device, and between the slave system and the real environment. Subsequently, the estimated delayed interaction properties were reflected back to the master/slave systems to overlap with the estimated impedance interactions properties between operator and environment. Sun et al. [
32] presented a novel scheme for improving control of tele-operated devices by implementing prescribed performance controls and a wave-based time-domain passivity methodology. The extended prescribed performance control ensures synchronization of velocity, force and position. A standard Lyapunov approach was discussed for studying stability and performance. The results showed that the proposed control not only accurately tracked the velocity, position and force profiles, but also controlled the system’s passivity. Azimifar et al. [
33] discussed the estimation of the external forces acting on the master/slave devices. The main advantage of this scheme is the elimination of the force sensor signal. This results in low cost for practical applications. The stability of the proposed scheme was also discussed using the conventional Lyapunov scheme.
The feedback signal based on touch is at the heart of bilateral tele-operative tasks. The master manipulator is operated by human being who depends on the actuator’s signal, whereas the slave manipulator is installed in a remote environment and run through the hydraulic actuator’s signal. Sakaino et al. [
34] proposed the idea of utilizing a combination of different techniques to attain the best tracking control and stable results. They proposed the use of oblique-coordinate control to de-couple the force and position controllers. Furthermore, they linearized the hydraulic actuator’s signal. Soltani et al. [
35] proposed the hybrid-force and position control schemes for applying a fixed force to heart tissue with synchronization along the desired trajectory. Input-constrained predictive tracking control was presented utilizing a non-linear model. The performance results show that the catheter generated a force with root-mean-square-estimation (RMSE) of 4.9 mm and localization tracking with RMSE of 0.89 mm. Wang et al. [
36] discussed the trajectory control for underwater manipulator systems by applying a discrete time-delay estimation methodology. Liu et al. [
37] investigated the adaptive control law to achieve accurate tracking of the desired position. They also considered the uncertainties and non-linearities, as well as the dead-zones. Their proposed algorithm robustly estimated manipulator dynamics based on non-linear parameters, which were later fed into the controller. Their results provide evidence for the fact that the proposed controller scheme performs well, even when dynamic and dead-zone uncertainties appear simultaneously. Several studies in the field of bilateral control have investigated force sensors for determining external force. However, it has been shown in the literature that in radioactive dismantling tasks, these sensors have major drawbacks. A manipulator system equipped with force sensors performs as a 2 mass resonator. This reduces the sense of high frequency force [
38]. A manipulator device consisting of a master/slave configuration is very attractive for application in the nuclear power plant dismantling process, as operator access is limited due to the possible radiation and the high load of material handling that is involved. However, it is difficult to use force sensors to realize force feedback in highly radioactive environments, because the force sensor will break as time passes.
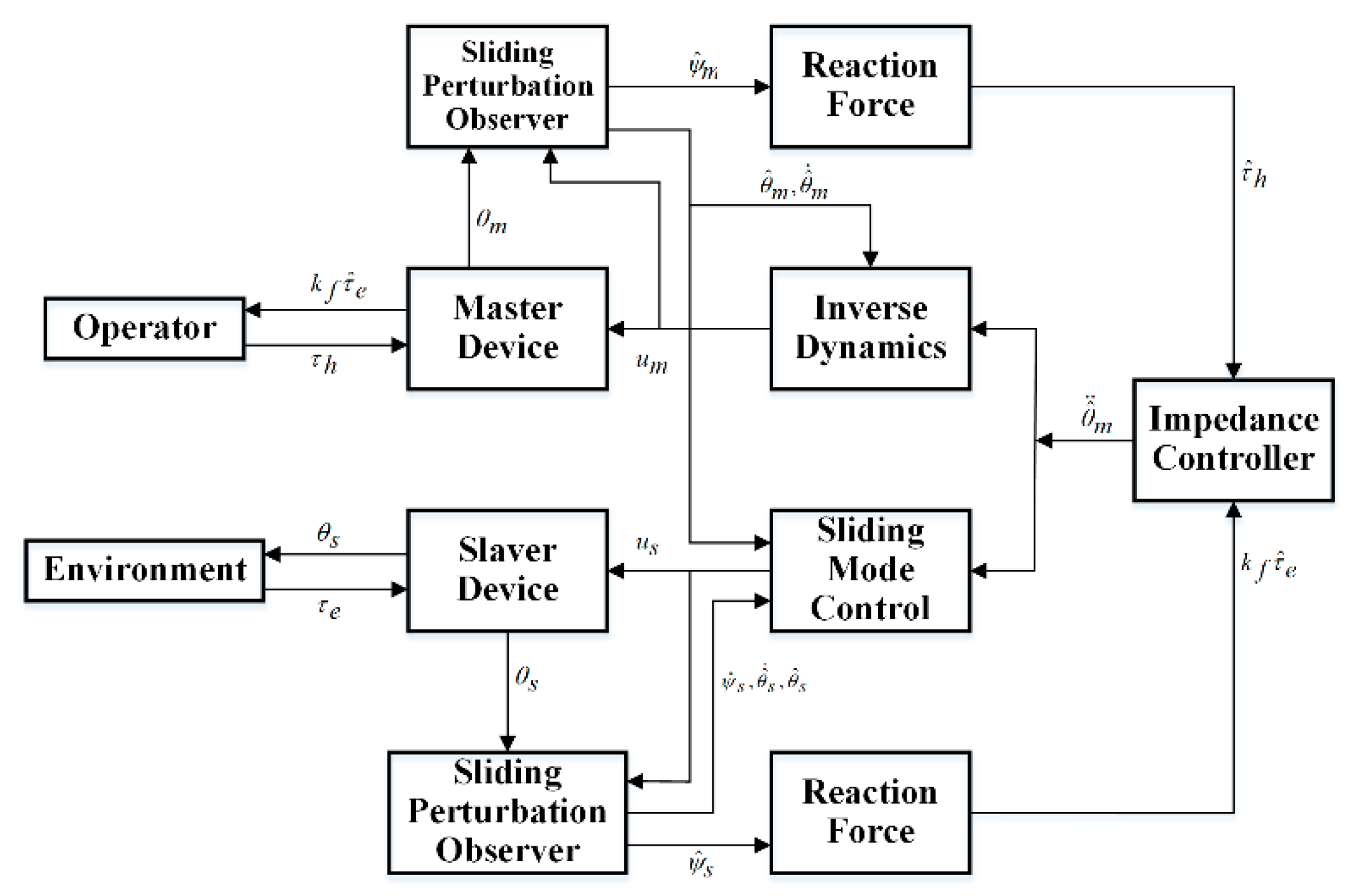
This paper implements tele-operated bilateral control of a hydraulic manipulator using sliding mode control with sliding perturbation observer (SMCSPO) for sensor-less force feedback. It is an efficient and robust control algorithm that not only estimates the reaction force of the master and the slave, but also applies this estimated reaction force to the tele-operated bilateral control of the hydraulic manipulator of a 3 degree of freedom (DOF) master/slave robot. The reason for using a hydraulic manipulator is that its power-to-weight ratio is better than any other type of actuated robot at the expense of positional accuracy. In this research, the sliding perturbation observer (SPO) is implemented to estimate the reaction force of the slave without using any sensor. The tele-operated bilateral control scheme is implemented for efficient and accurate position and force tracking betweenin the master/slave configuration with visual feedback. In the bilateral controller, the difference of the reaction force of the slave manipulator and the operating force applied to the master manipulator is designed to target the impedance model. The reaction force of the slave is a result of the effects in the remote environment, while the operator force is applied by the operator (human) at the master manipulator. The experimental results of our studies confirm that the slave efficiently follows the position trajectory of the master system.
The remainder of the manuscript is structured as follows: Modeling and dynamics of the hydraulic manipulator are described in
Section 2; the theory of sliding mode control with sliding perturbation observer and the algorithm for estimating reaction force are presented in
Section 3; the tele-operated bilateral-control strategy is described in
Section 4; the details of the experimental setup are summarized in
Section 5; the results are shown in
Section 6; and concluding remarks regarding the study are provided in
Section 7.
2. Modeling and Dynamics of the Hydraulic Manipulator
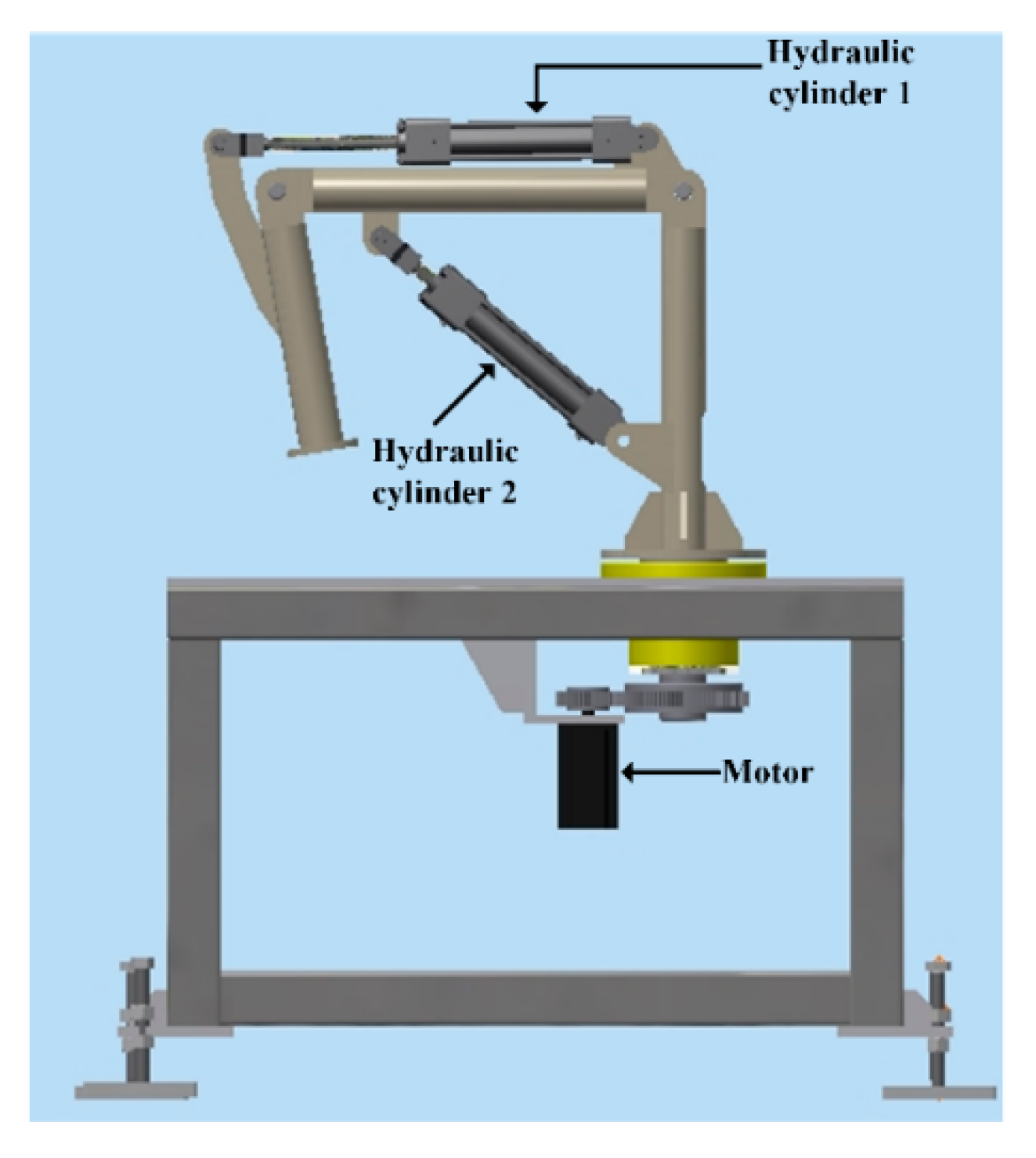
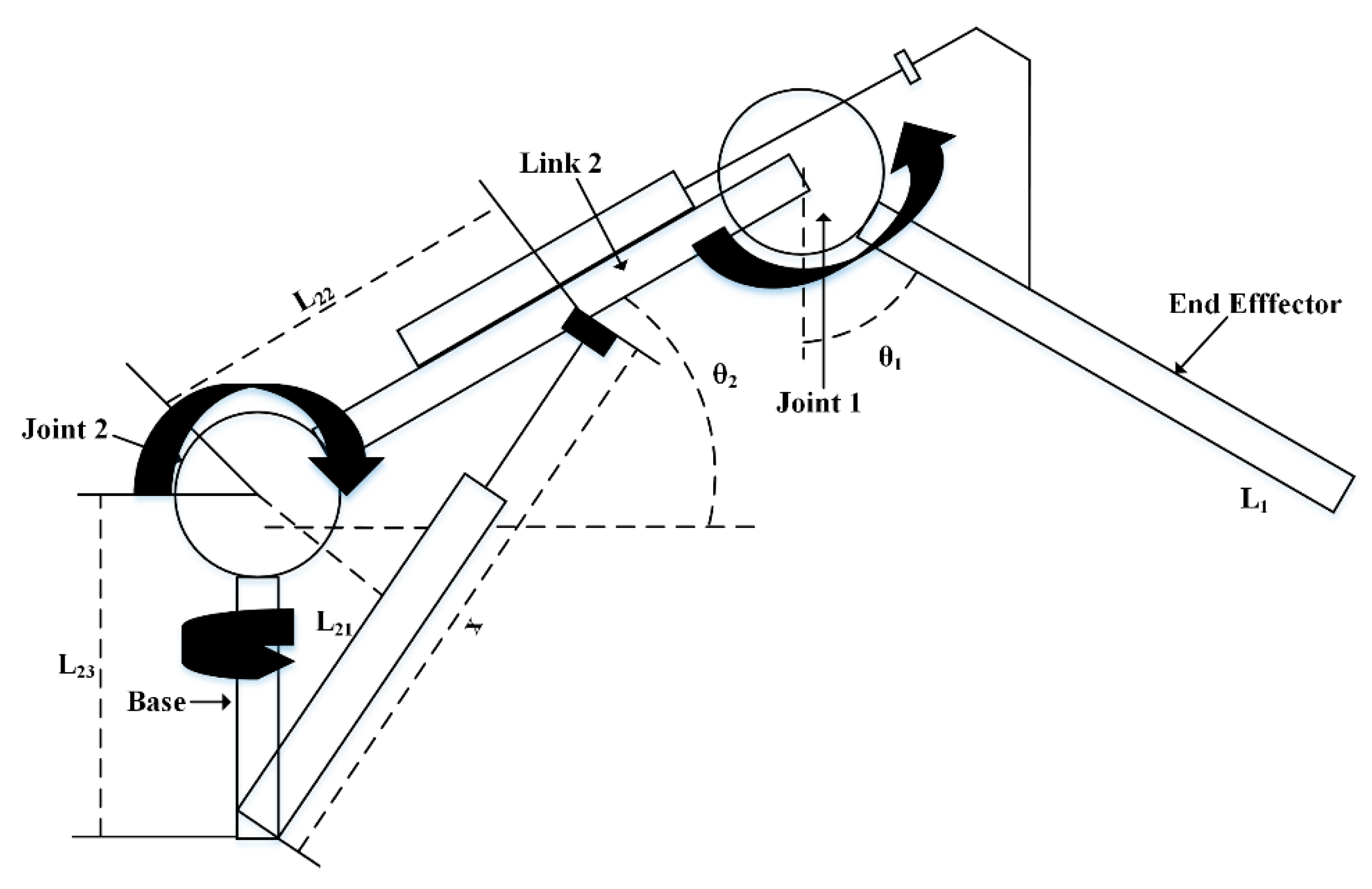
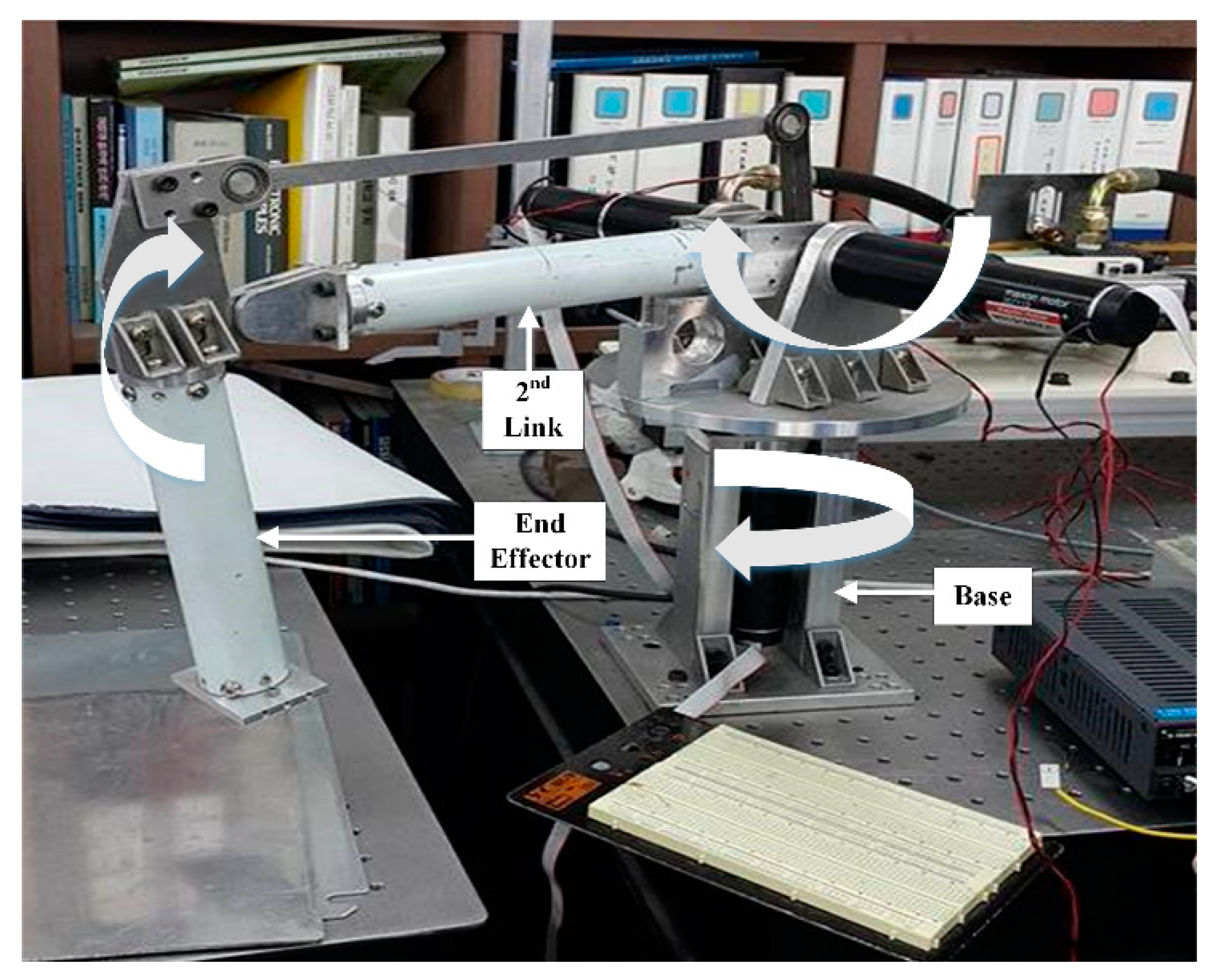
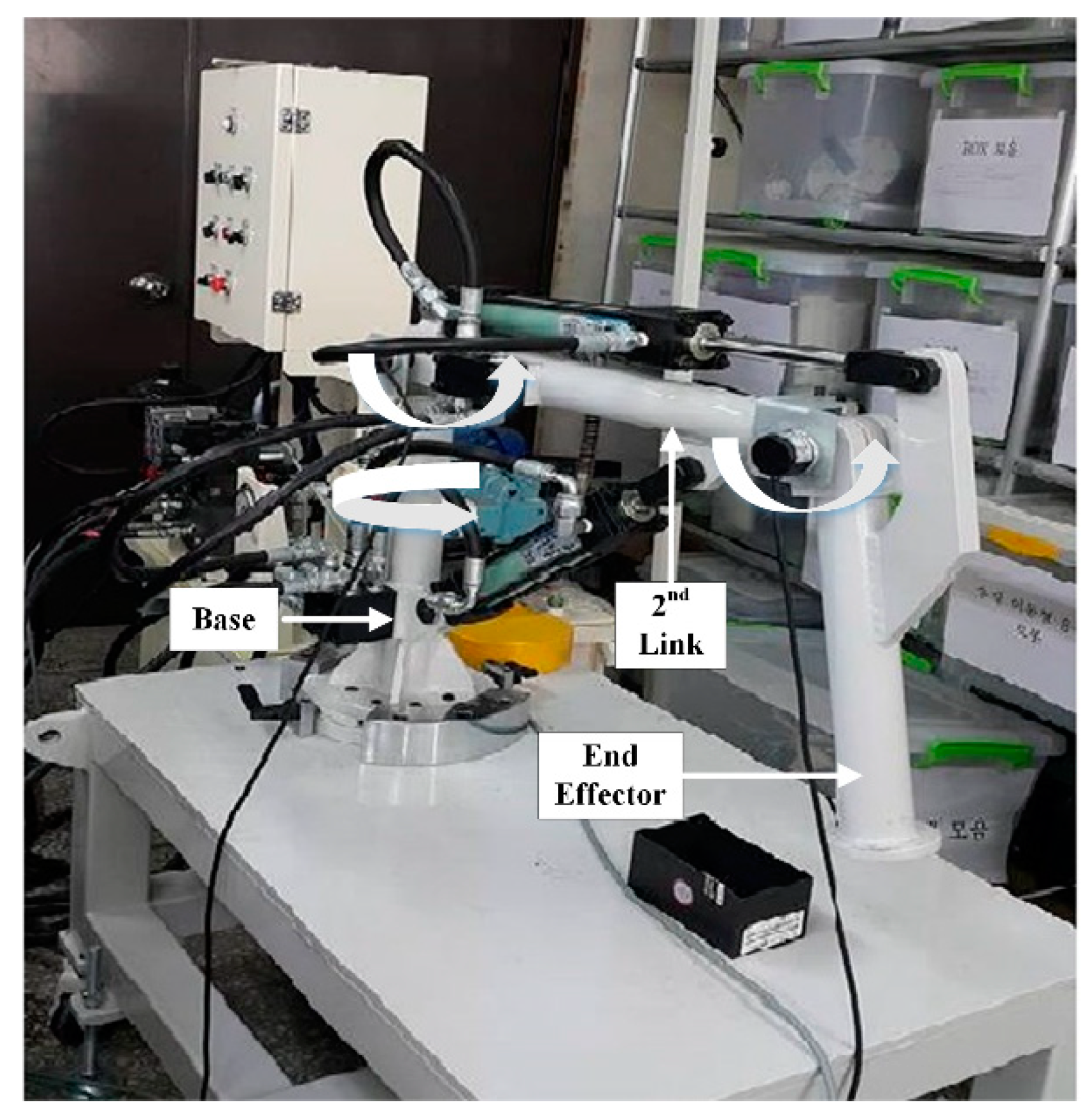
Several applications in the machine tool/handling industry have utilized hydraulic systems in past. These applications include the handling of hazardous material, heavy industry, oil and gas exploration, etc. Servo systems can be designed to estimate different parameters, such as acceleration, force, temperature profile, and voltage/current, among others. The advantageous features of hydraulic actuators include robust response, broad range and limited stroke, etc., in addition to zero backlash, less wear and tear, and accurate control. Generic schematic diagrams of a 3-DOF hydraulic manipulator utilized for dismantling nuclear power plants are shown in
Figure 1 and
Figure 2. Hydraulic systems used for dismantling nuclear power plants include a couple of hydraulic cylinders for the two links and an AC servo-motor for the base. The dismantling process requires a greater force to produce vertical moment as compared to the force required to produce horizontal moment. The hydraulic manipulator is modeled using the signal compression method [
39].
The modeling equations of a manipulator depend upon localization, different forces, and acceleration properties, which can be mathematically written as,
where
= angle of joints,
= mass/inertia matrix,
= centrifugal/coriolis torque,
= joint space gravity torque and
= vector of joint torques. Equations for different dynamical properties of links can be written as:
where
,
,
, and
denote the inertia, damping, mass and torques of the base, 2
nd link, and end effector, respectively.
denotes the uncertainty term, and
and
represent the viscosity of the cylinders.
and
are the lengths of the base and the end effector,
represents the length from the joint to the center of mass (COM) of the 2
nd link.
in Equation (3) denotes a dynamic torque effect at joint 2 by hydraulic cylinder motion attached to link 2 to rotate the end effector of the manipulator,
and
are the velocities of the 1
st and 2
nd cylinders, respectively.
,
and
denote the reaction torque generated by contact with the environment and joints 1, 2 and 3, respectively.
3. Sliding Mode Control with Sliding Perturbation Observer (SMCSPO)
SPO and SMC has shown efficient performance against perturbation in many studies by employing partial state feedback. The combination of SMC and SPO is known as sliding mode control with sliding perturbation observer (SMCSPO) [
40]. In this work, SMC and SPO are used respectively to control and to estimate the reaction force of a 3DOF robotic manipulator. Generally, second-order dynamics of n-DOF can be represented as
where
denotes the state vector,
and
are the non-linear driving force and uncertainties, respectively,
is the control gain matrix with corresponding uncertainties
,
is the external disturbance, and
is the control input.
,
are well-known continuous functions of state, described in [
41]. All these uncertainties in joint form can be defined as perturbation, with the mathematical form of the perturbation being as follows,
It is assumed that the perturbations are upper bounded by a known continuous function of the state. The continuous function of the state for the upper bound of the perturbation can be defined as follows:
where
,
and
represent the expected upper bounds of the uncertainties. Let us suppose
, defined in Equation (5), except the perturbation of Equation (6) is represented as
where
, and
= a new control variable. The SPO equations are derived as in [
40].
where
,
,
are greater than zero and
is the estimation error.
= estimated perturbation.
The sliding function is defined as follows:
where
is the actual position tracking error,
. As the sliding surface is reached, we define
, and the sliding control is represented as
The new control input
is designed such that it forces
outside of the prescribed manifold. The desired
dynamics is represented as
Thus,
can be calculated as
The control law is defined as
In the above equation,
is a control input of SMCSPO. The actual
dynamics within the boundary layer
becomes
The designed controller (SMCSPO) reduces the error between the real and the desired trajectories. The mechanical hardware limitations restrict the design procedure as described in Jairo et al. [
40]. The instant at which
, the observer design, and the
dynamics can be represented in mathematical form as shown below:
where a square matrix of order 4 in Equation (20) represents the state matrix. Further supposing that
represents the eigenvalues of the state matrix A, then its characteristic equation det
can be expressed as,
By implementing the pole-placement method, let us introduce a desired characteristic polynomial
which leads to a design solution
It is clear from the equation that higher values of gain
guarantee higher accuracy. In [
41], the authors showed the limitations of sliding function dynamics. They suggested that
should be less than
, where
is the frequency and
is a positive number. These results were also validated in another study [
42]. In this work, we selected the value of optical gain by using following formula:
Estimation of Reaction Force Using Sliding Perturbation Observer (SPO)
The SPO can be used to estimate the perturbation, leading to the determination of the reaction forces. The estimation of perturbations consists of two factors: the external disturbance, and the dynamic error due to nonlinearities of gravity and friction. Equations (2) and (3) can be used to estimate the perturbation.
Equations (24) and (25) can be rewritten as
where
and
are the estimated reaction torques of the end effector and the 2
nd link, respectively. It is worth mentioning that if the parameter is well estimated, then the parameter of uncertainty could be considered as well.
5. Experimental Setup
Figure 7 shows the experimental setup of the slave device. The hydraulic manipulator has one servo motor and two cylinders. The hydraulic cylinder is used to actuate the 2
nd link and the end effector, whereas the servo motor is used to control the base of the manipulator.
The 3DOF hydraulic manipulator was used to perform several experiments. The specifications of the hydraulic manipulator are listed in
Table 1.
Several previous studies have discussed identification schemes and control design strategies for hydraulic manipulators [
43,
44]. Such systems include a couple of hydraulic cylinders and an AC servo motor. Usually, signal compression methods are utilized to derive dynamical equations for all of the described systems. These methods provide an equivalent impulse signal and utilize correspondingly derived functions to estimate the dynamical model [
45]. This dynamical model can be represented as
where
= damper and
= inertia. The values of the dynamics are presented in
Table 2.
A pictorial view of the experimental setup is shown in
Figure 8. It contains the master and slave systems and the corresponding control system.
The master/slave manipulators both have 3-links. The first link in both systems is mathematically connected to the base of the corresponding system. Reaction forces are generated at the end effector and the 2
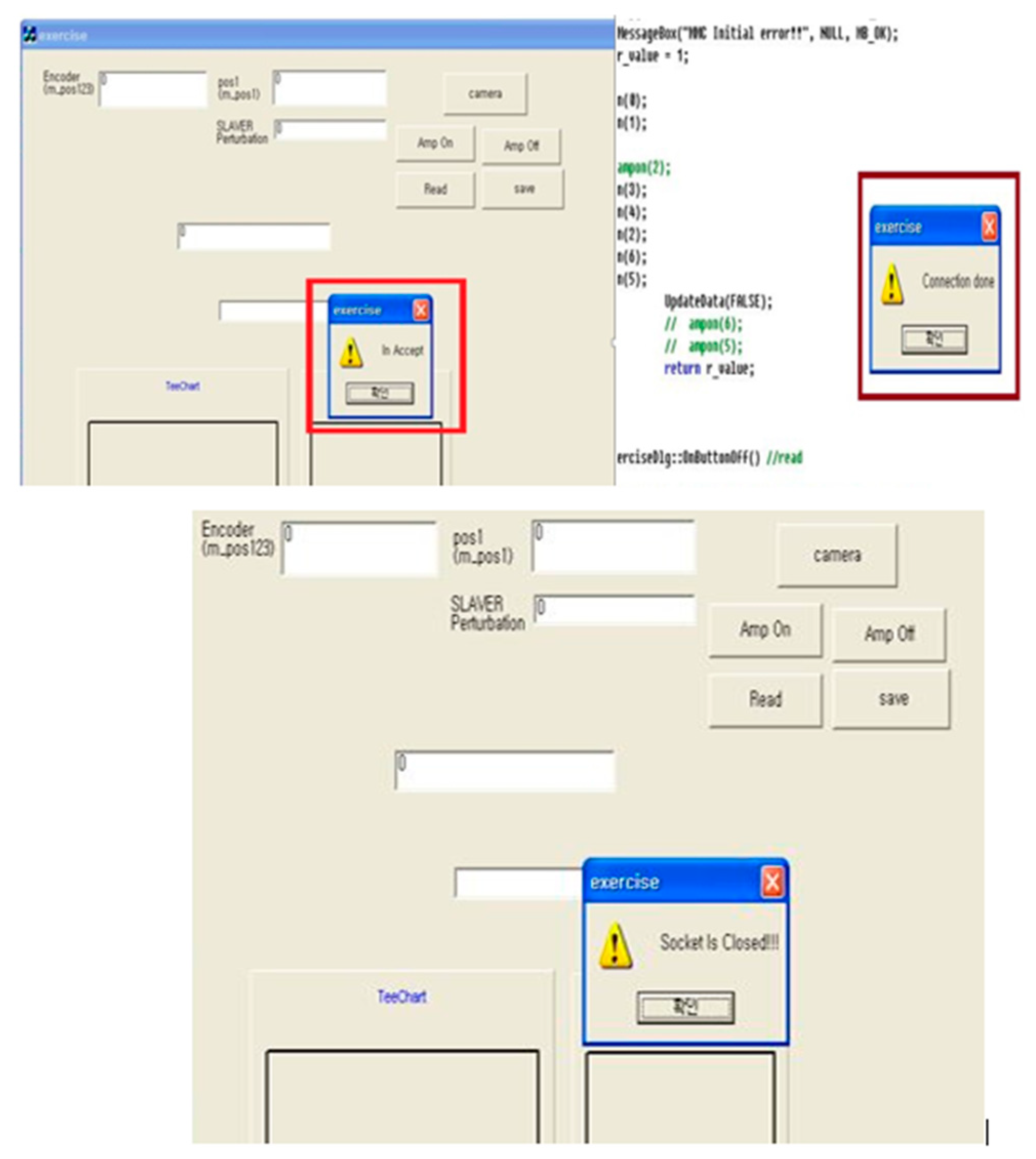
nd link. The reaction forces are calculated/estimated based on SMCSPO. The operator at the master manipulator generates commands for the master device that are subsequently followed by the slave device, and using a personal computer, the operator can take a visual look at the master device. The design of the SMC controls the trajectory of the slave device in accordance with the movement of the master device. The GUI for visual feedback is presented in
Figure 9.
6. Experimental Results
The SMCSPO parameter values used in the experiments are listed in
Table 3.
To verify the methodology, seven experiments were performed with SMCSPO under different scenarios. These experiments included: (i) tele-operated bilateral control of the end effector; (ii) estimation of the perturbation at the end effector of the master/slave; (iii) tele-operated bilateral control of the 2
nd link; (iv) estimation of the perturbation at the 2
nd link of the master/slave; (v) tele-operated bilateral control of the base; (vi) estimation of the perturbation at the base of the master/slave; and (vii) tele-operated bilateral control of the end effector and the 2
nd link at the same time. The master and slave devices are shown in
Figure 7 and
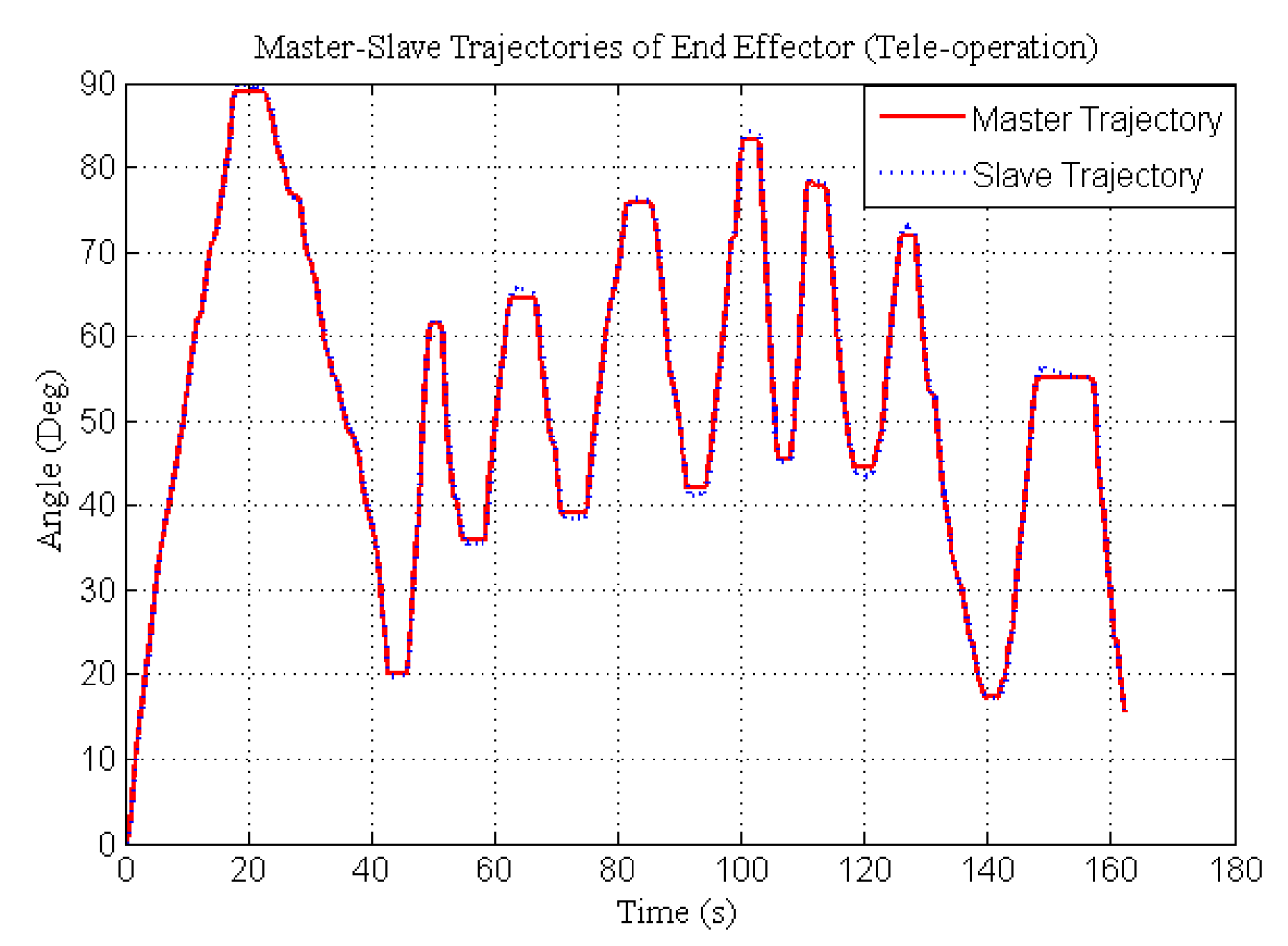
Figure 8. These experiments were performed in real-time scenarios in which the operator (human) set the master manipulator in movement, and the slave manipulator moved in accordance with this trajectory as evaluated by SMCSPO. The trajectory profiles for the end effectors of the master/slave devices are depicted in
Figure 10. The trajectory for the master device’s end effector is presented as a red line, while for the slave device, it is shown as a blue line. It is evident that the slave’s end effector follows the master’s trajectory with only a very small degree of mismatch. It can also be seen that the trajectories of both of the end effectors attain a maximum value of 88.96 degrees at 18 s on the time scale. It is worth noting that the end effector of the slave has a workspace of 0–90 degrees.
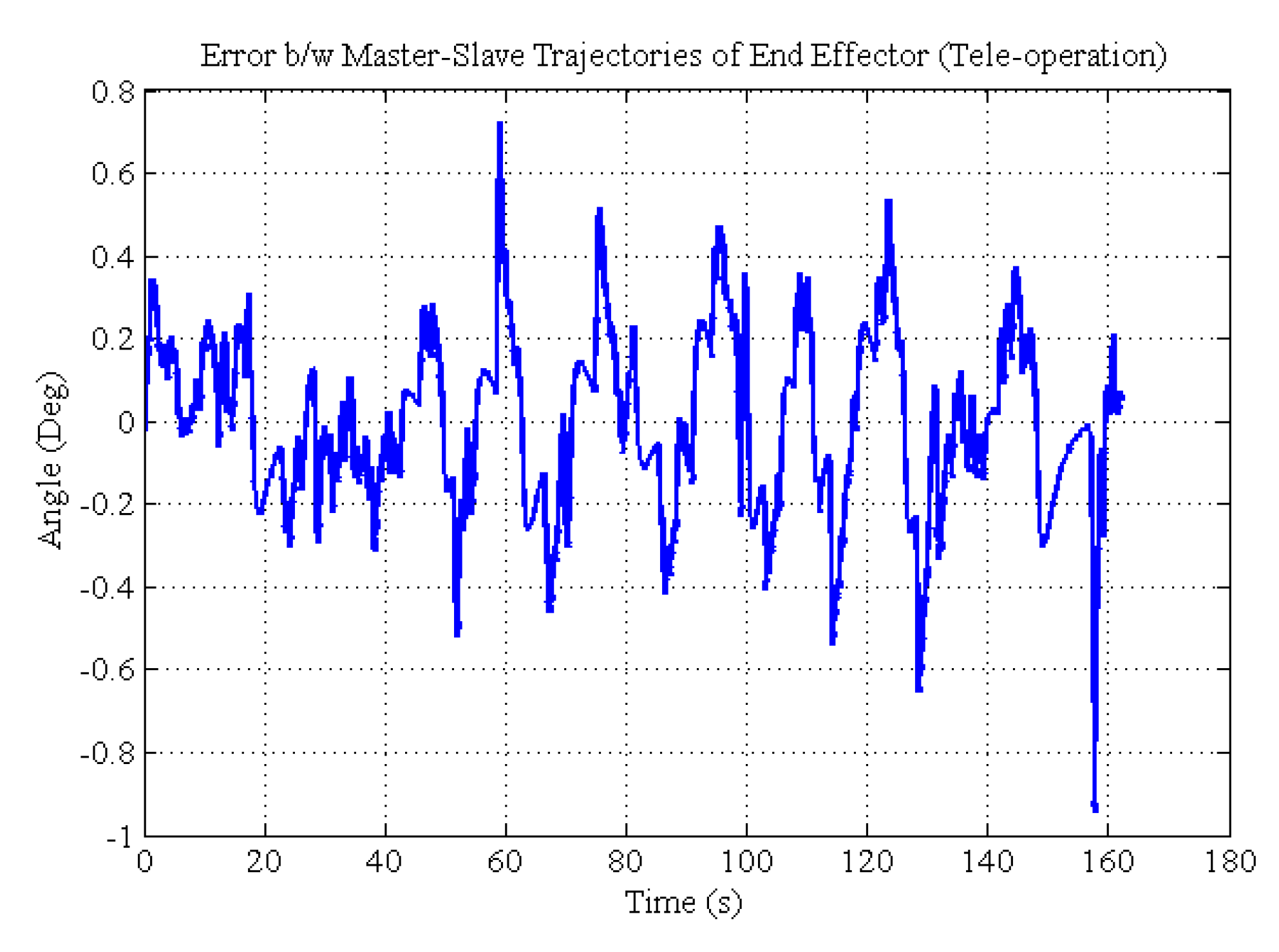
The relative errors of the trajectories of the end effectors of the master and slave manipulators are shown in
Figure 11. It can be seen that maximum value of error between the master and slave trajectories was 0.94 degree at 157.71 s on the time scale. It is clear from
Figure 11 that the error profile is very small, which shows the accuracy of the proposed method.
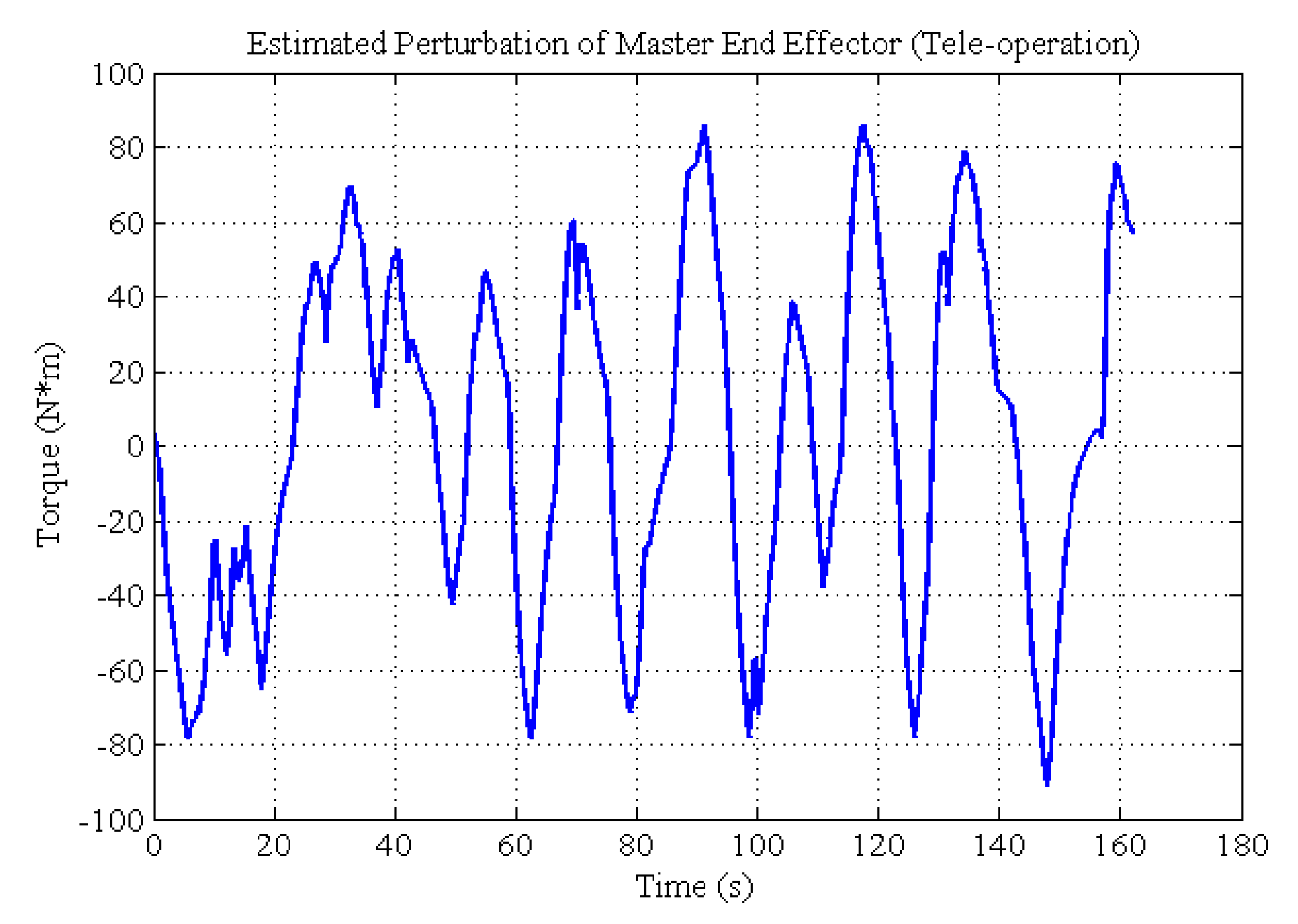
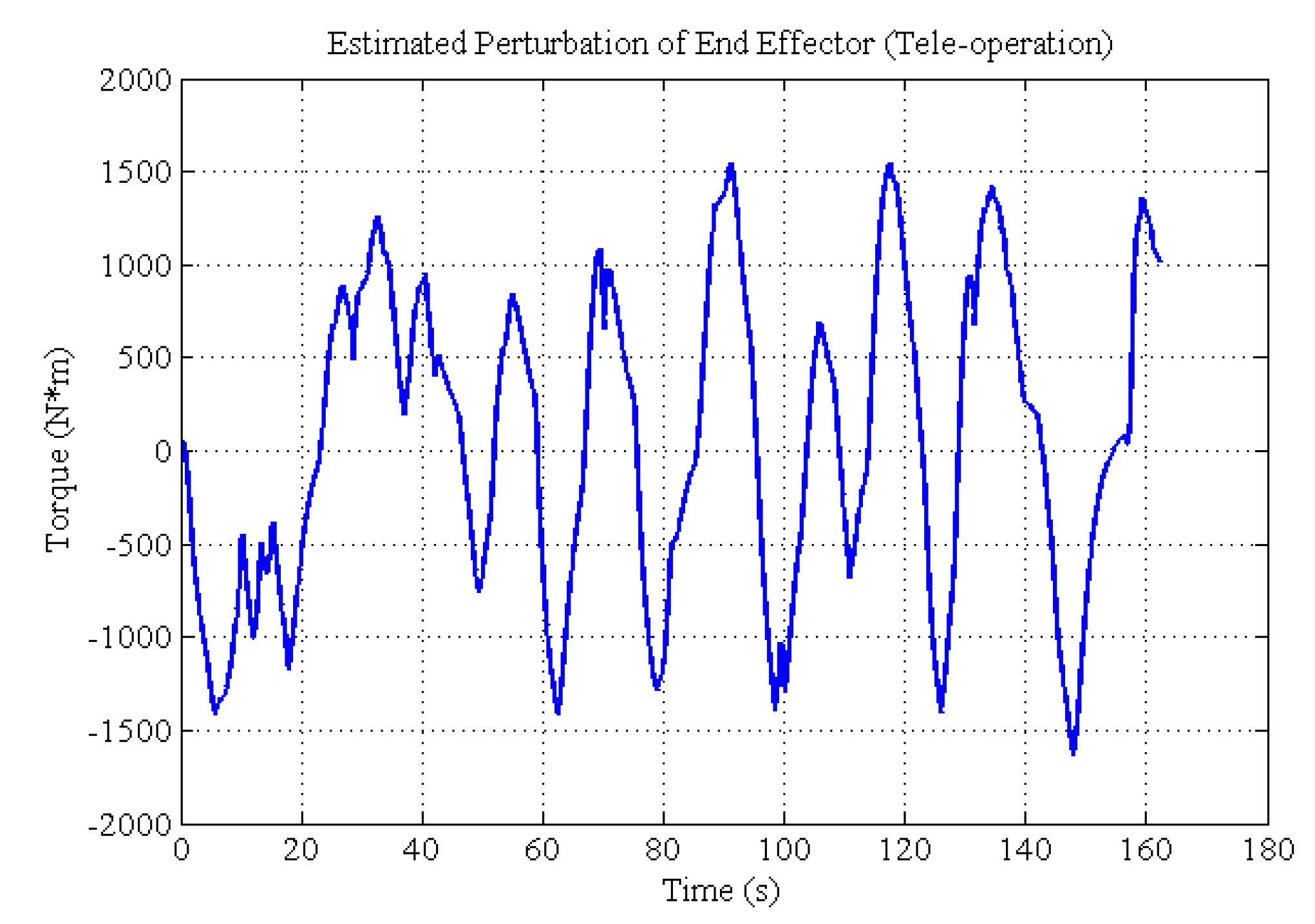
The estimated perturbations for the master’s and slave’s end effectors are presented in
Figure 12 and
Figure 13, respectively. The maximum value of estimated perturbation for the master system was 90.87 N·m at 178.01 s, whereas for the slave system, this was 1635.72 N·m at 148.016 s.
It is evident from
Figure 12 and
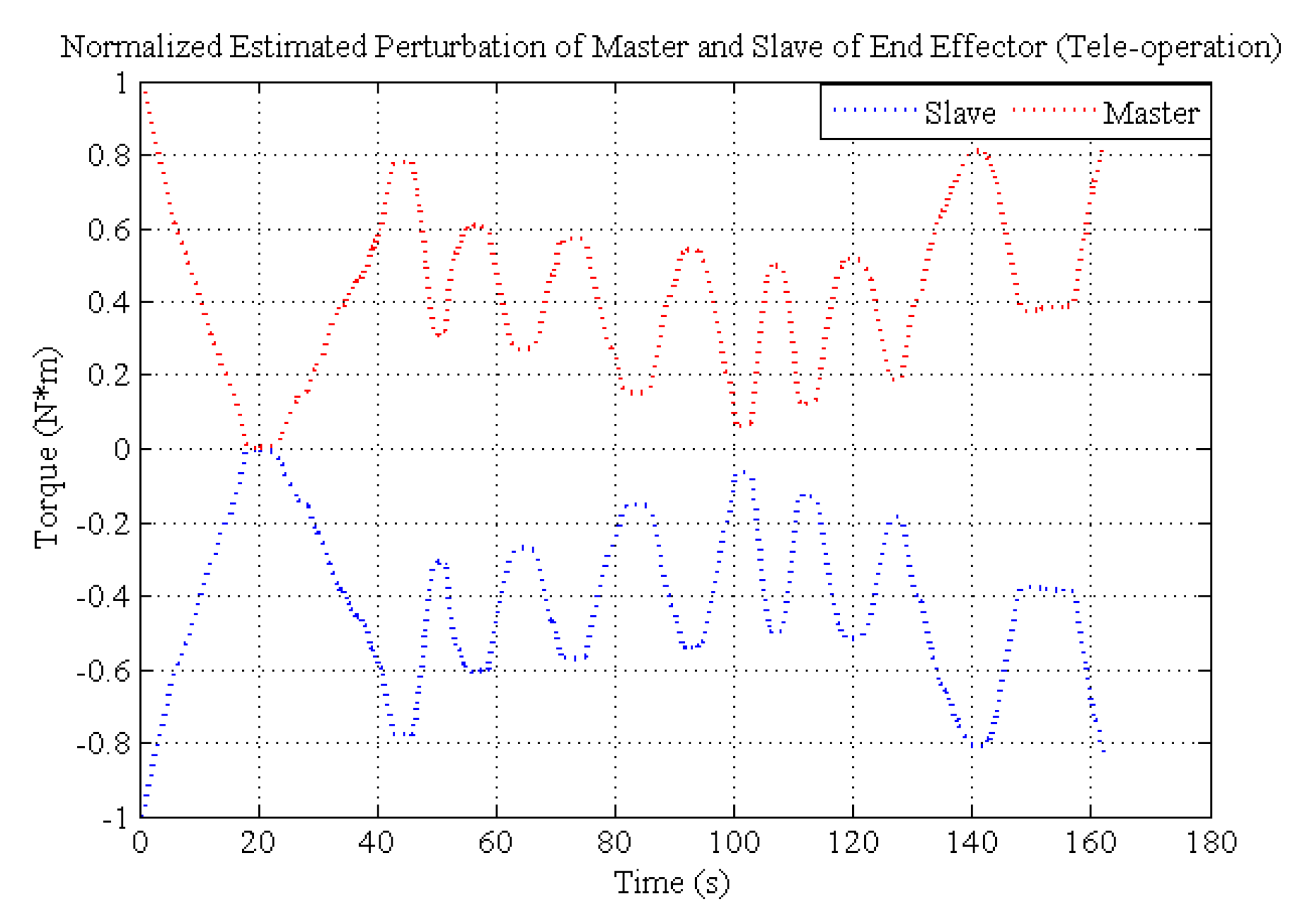
Figure 13 that the estimated perturbation corresponding to the slave system had a much higher value than that for the master device. The reason behind this is the hydraulic system of the slave device. The dynamical value of the slave system is 303.26, which is higher than the value for the master device, which is 1.35135. The profiles for the estimated perturbations were similar, but with opposing directions. Numerically, the normalized values for estimated perturbation lay within the ranges [0, 1] and [−1, 0] for the master and slave systems, respectively. The normalized values were calculated as follows.
where
is the
ith value of perturbation. The results for normalized estimated perturbation for the end effectors of both the master and slave systems are shown in
Figure 14. The profile corresponding to the master device is shown as a red line, while that for the slave is shown as a blue line.
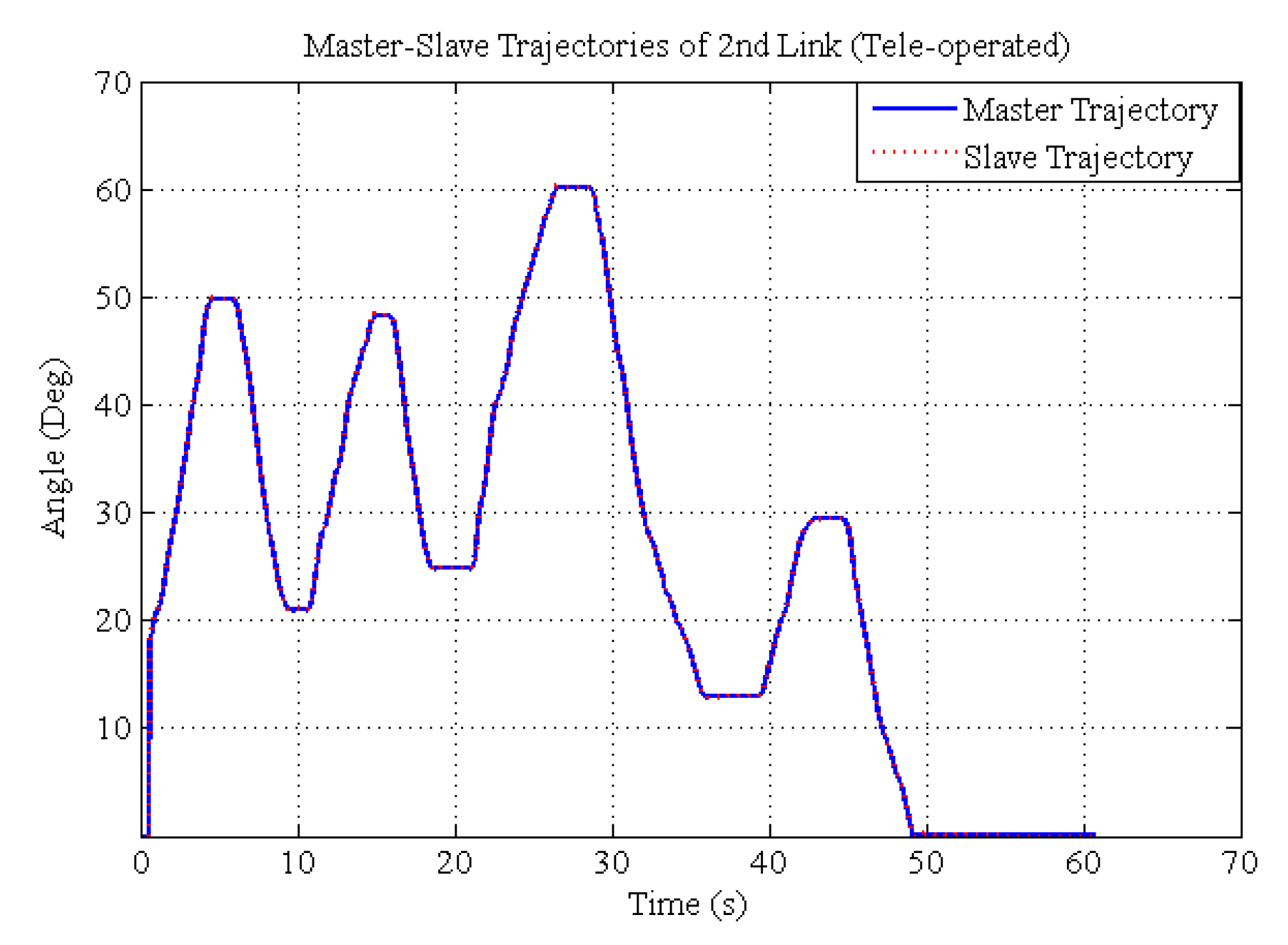
The results for the 2
nd link of the master device (blue line) and the slave device (red line) are presented in
Figure 15. It is evident that slave’s 2
nd link follows the master’s 2
nd link effectively using SMCSPO. The space allows the 2
nd link to move between 0 and 90 degrees. The maximum value of the profile is 60.13 degrees at 26.55 s on the time scale.
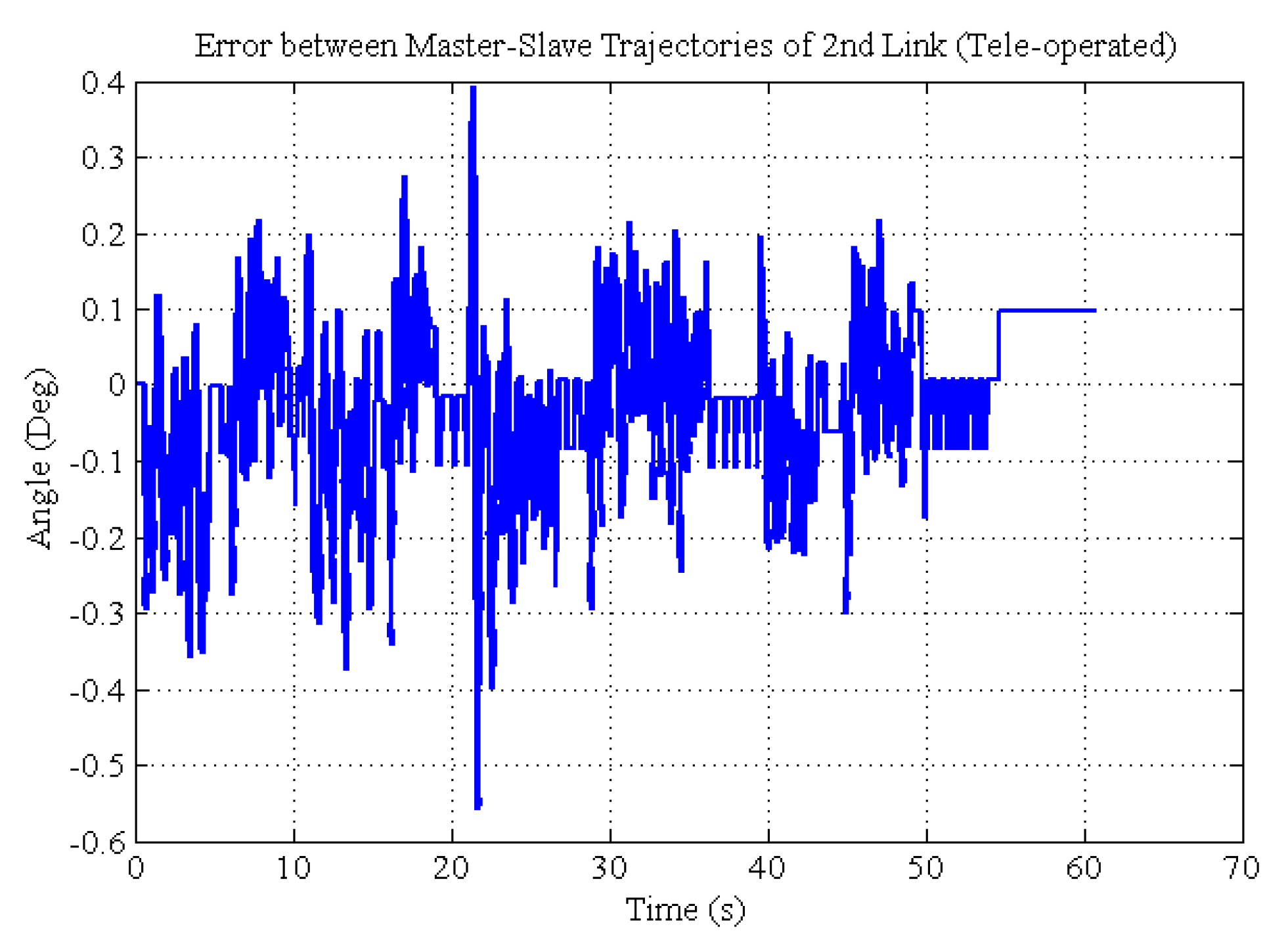
The mismatch profile for the trajectories of the 2
nd link for the master and slave devices is shown in
Figure 16. The maximum mismatch value for the corresponding trajectories was 0.55 degree at 21.68 s on the time scale.
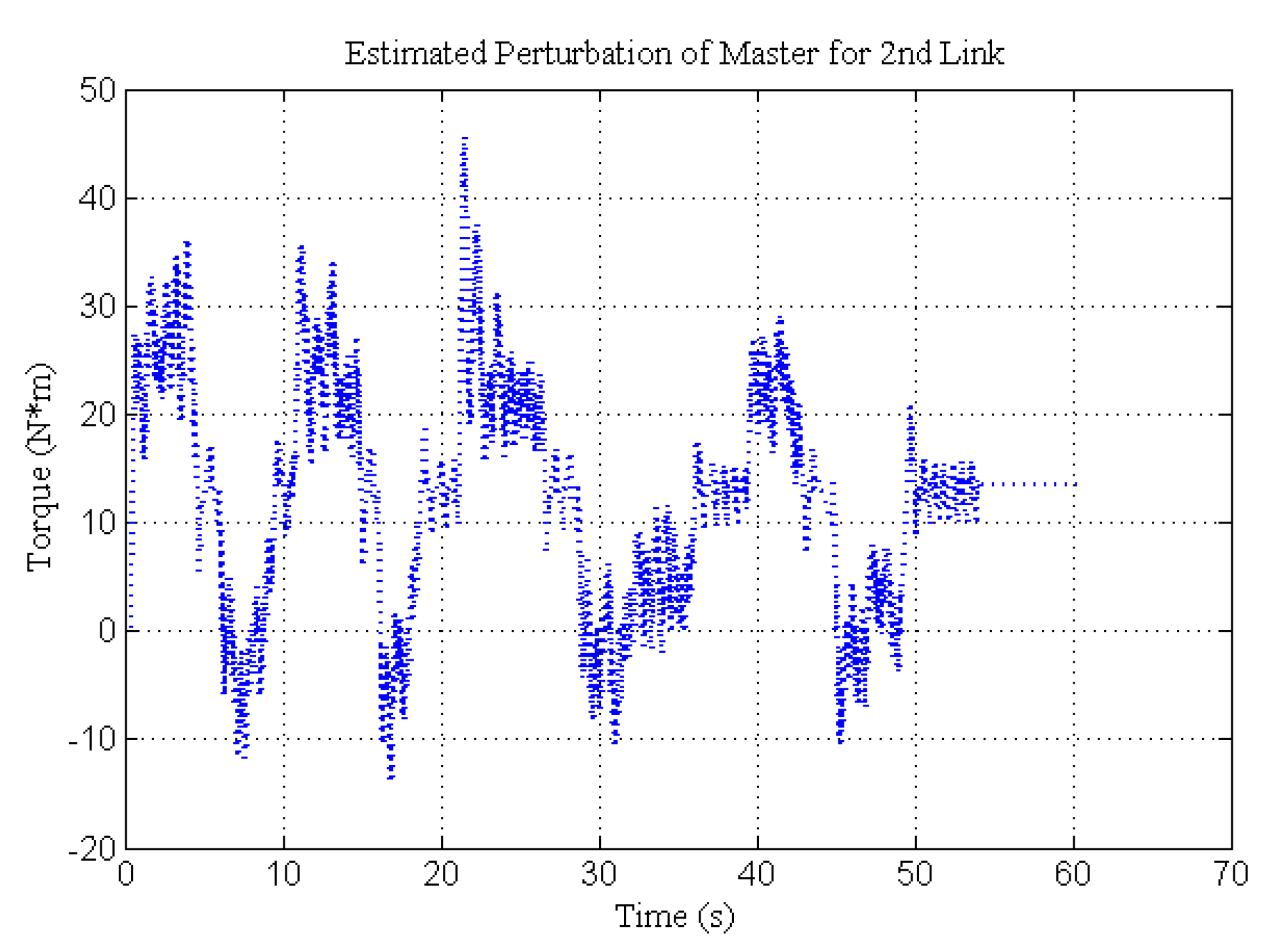
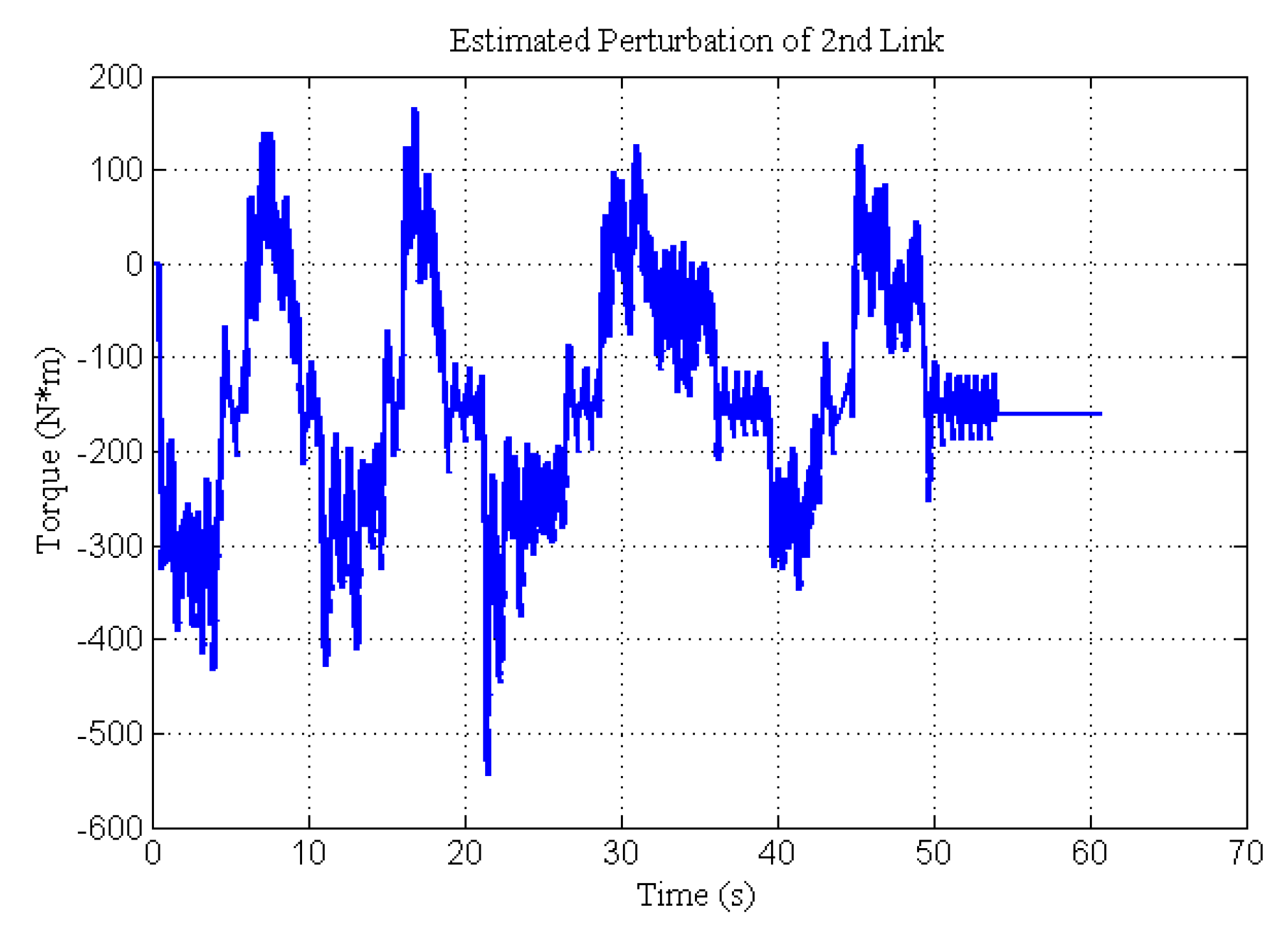
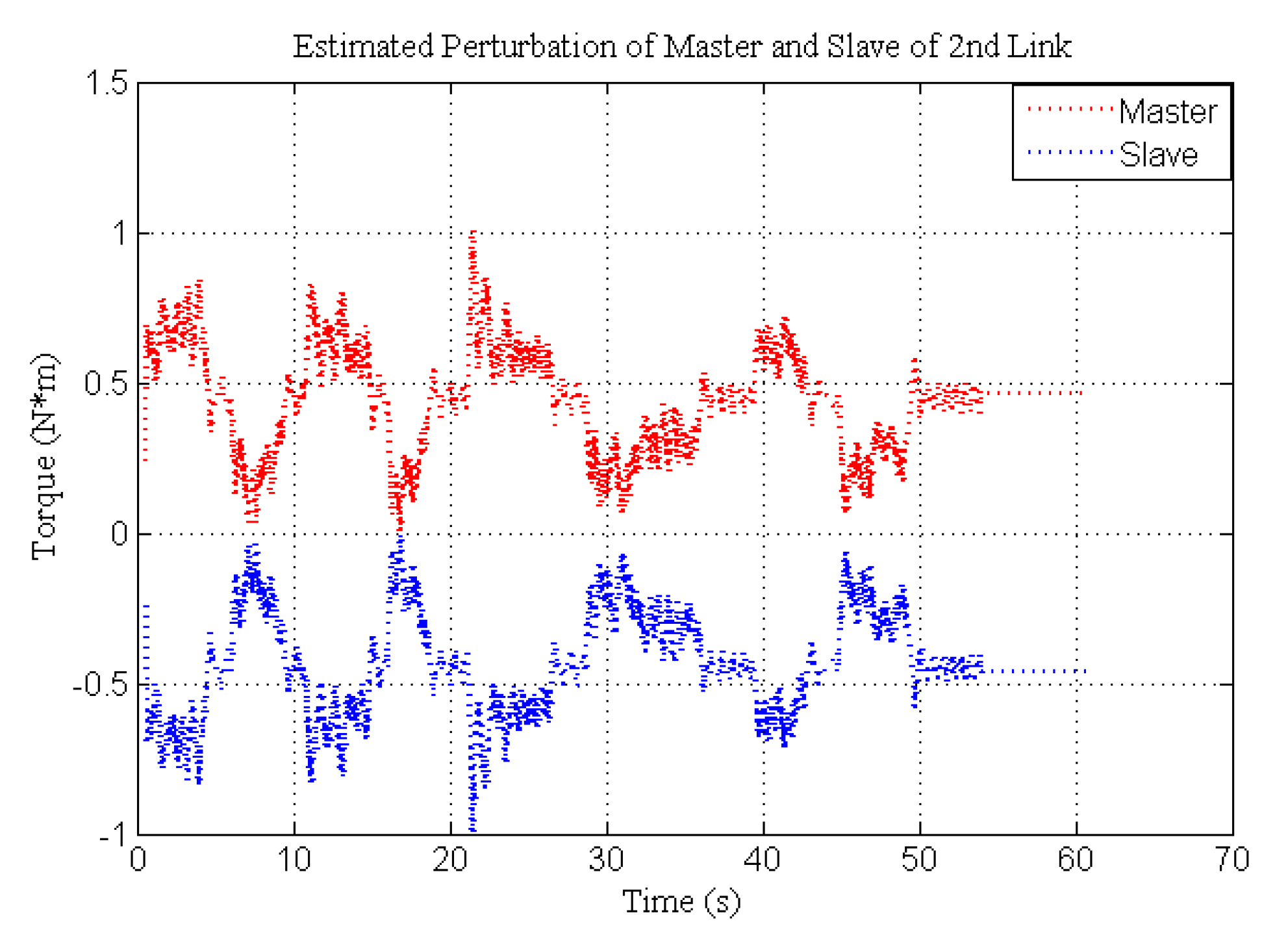
The estimated perturbations for the 2
nd link of the master and the slave are presented in
Figure 17 and
Figure 18, respectively. It can be seen that the maximum value of perturbation was 45.69 N·m at 21.47 s for the master’s 2
nd link and 543.9 N·m at 21.47 s for the slave’s 2
nd link. One important fact is that the estimated perturbation profiles are the same for both the master and slave devices, but in opposing directions.
The normalized estimated perturbations of the master device’s end link (red line) and the slave device’s 2
nd link (blue line) are presented in
Figure 19.
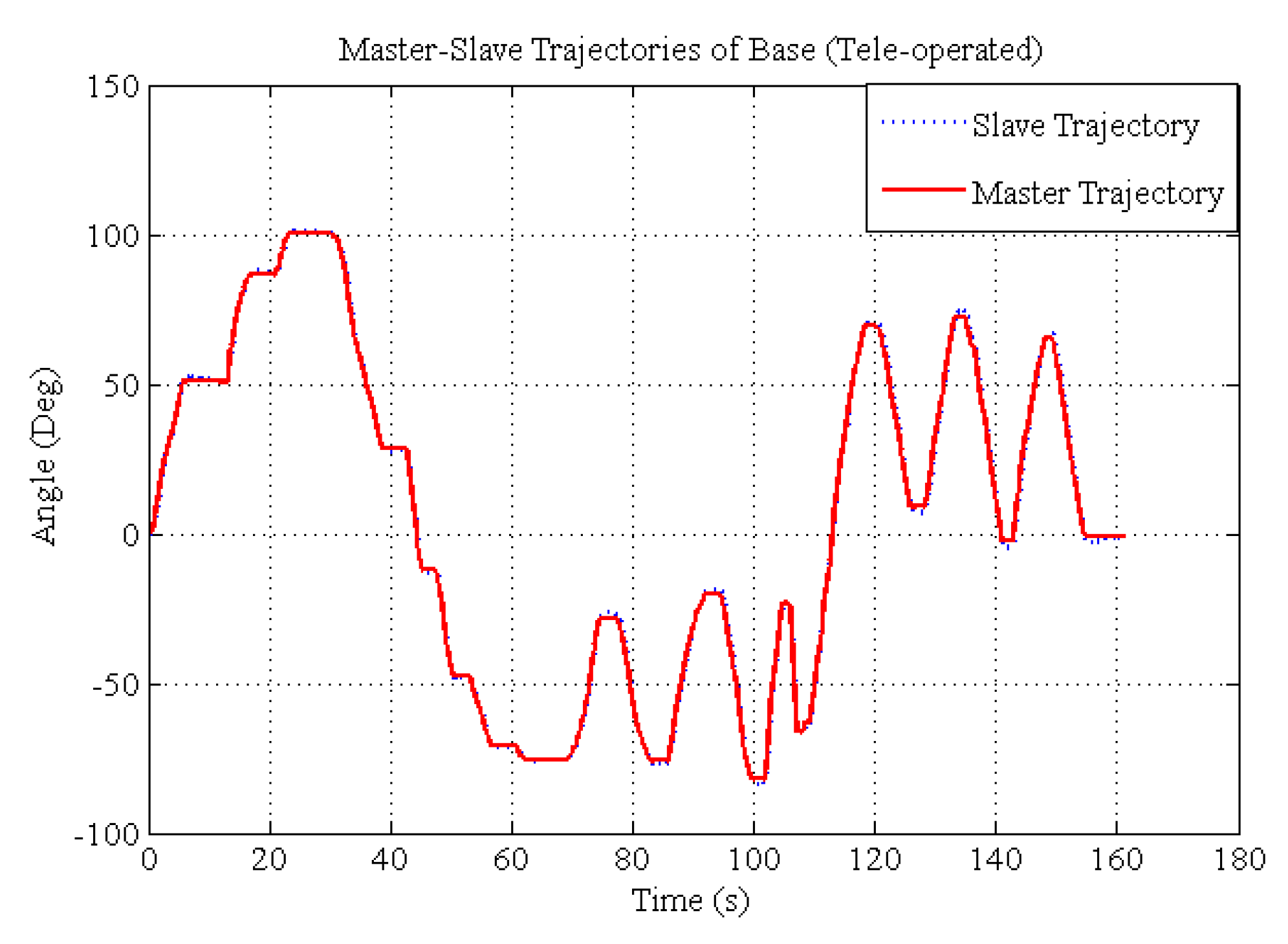
The results of the experiments for the base trajectories of both the master and slave devices are shown in
Figure 20. The base trajectory of the master device is shown as a red line, while that of the slave device is shown as a blue line. Accurate tracking of the slave shows the effectiveness of the proposed scheme. The available space for the base allows its movement between 0 and 360 degrees. The maximum value of the trajectory profile is 100.38 degrees at 23.2 s on the time scale.
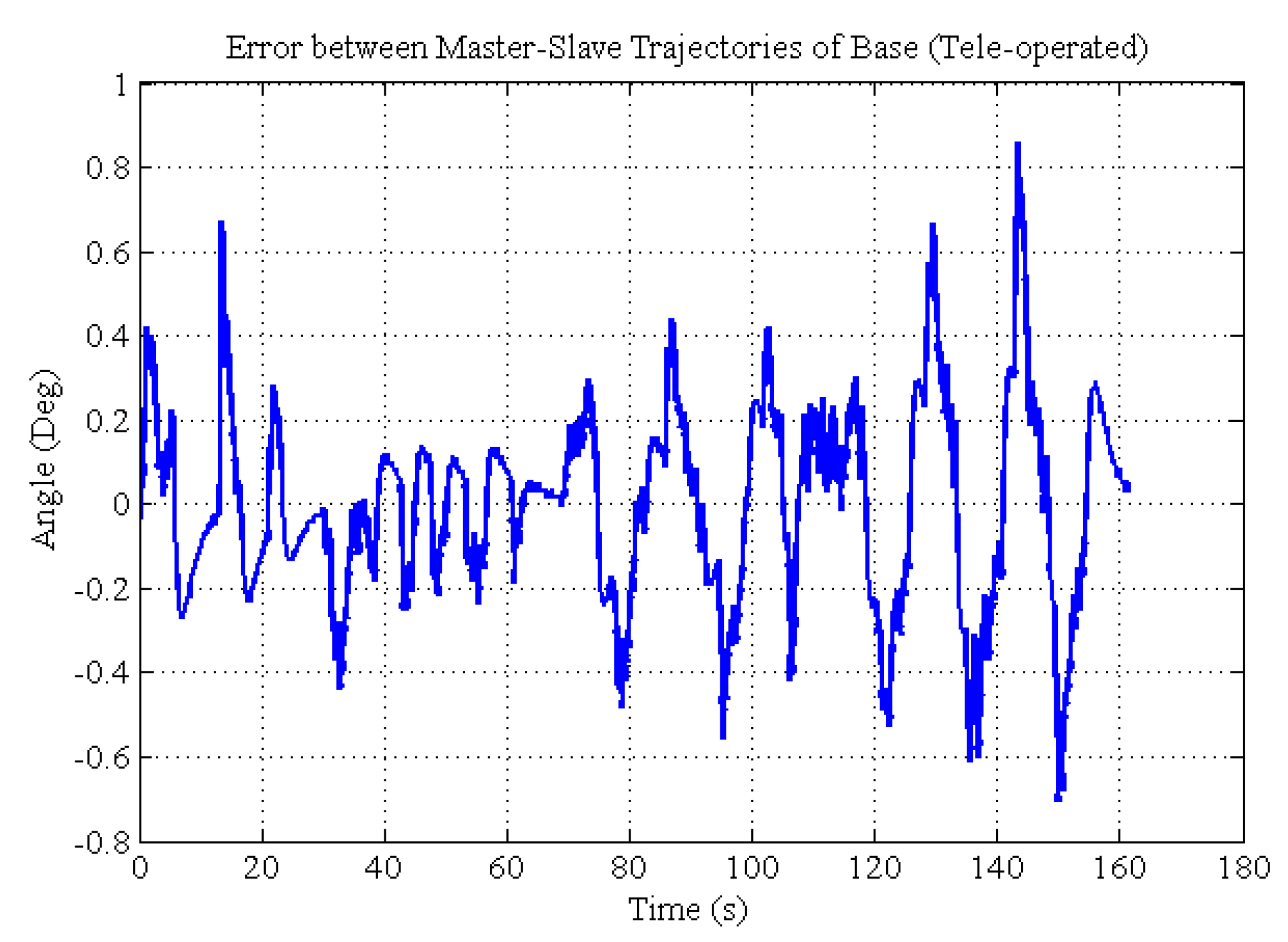
The mismatch in the tracking of the base is presented in
Figure 21. The maximum mismatch was observed at 143.3 s on the time scale, with a value of 0.859 degrees.
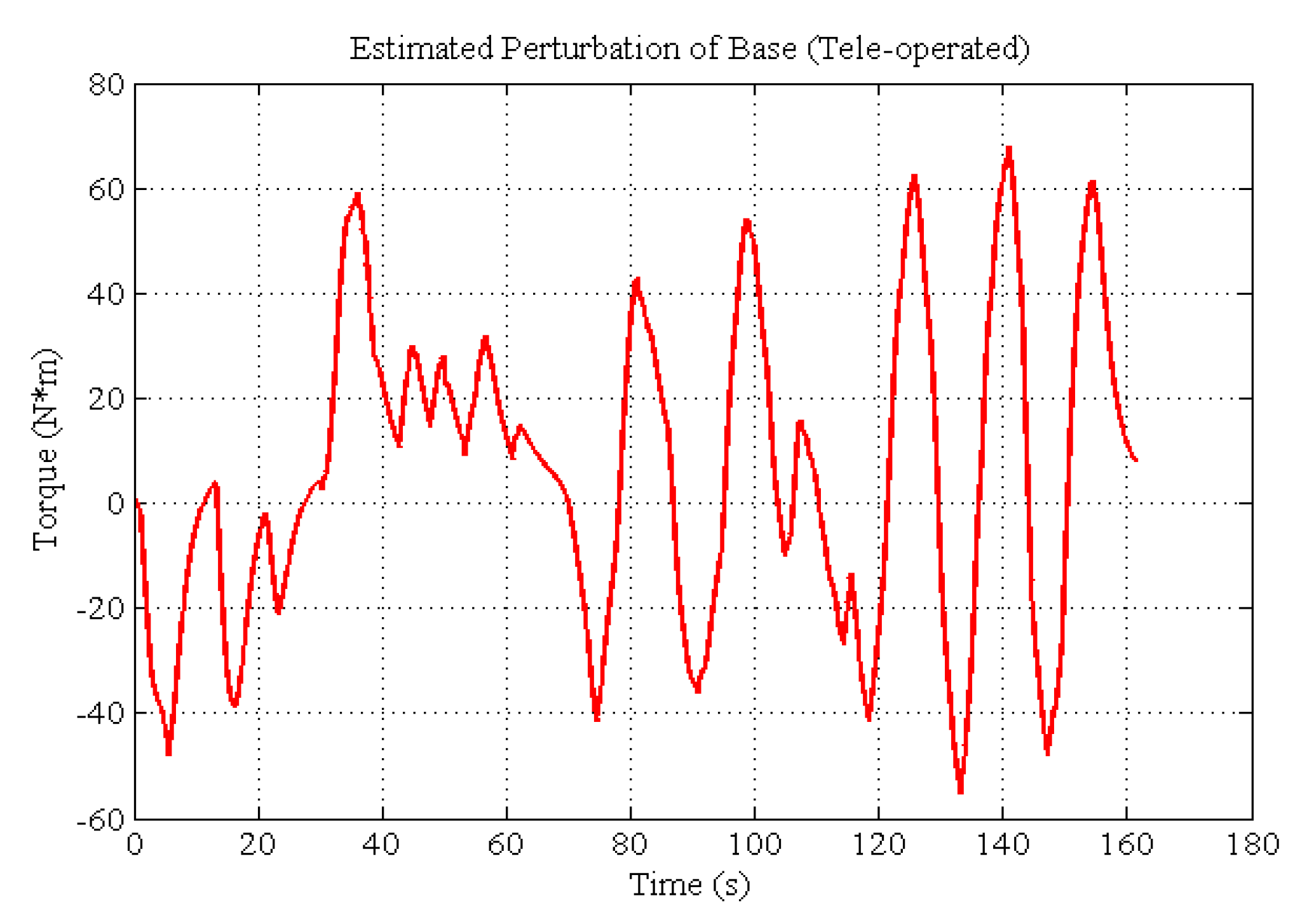
Figure 22 represents the estimated perturbation of the base. The maximum estimated perturbation of the master was 67.89 N·m at 140.96 s.
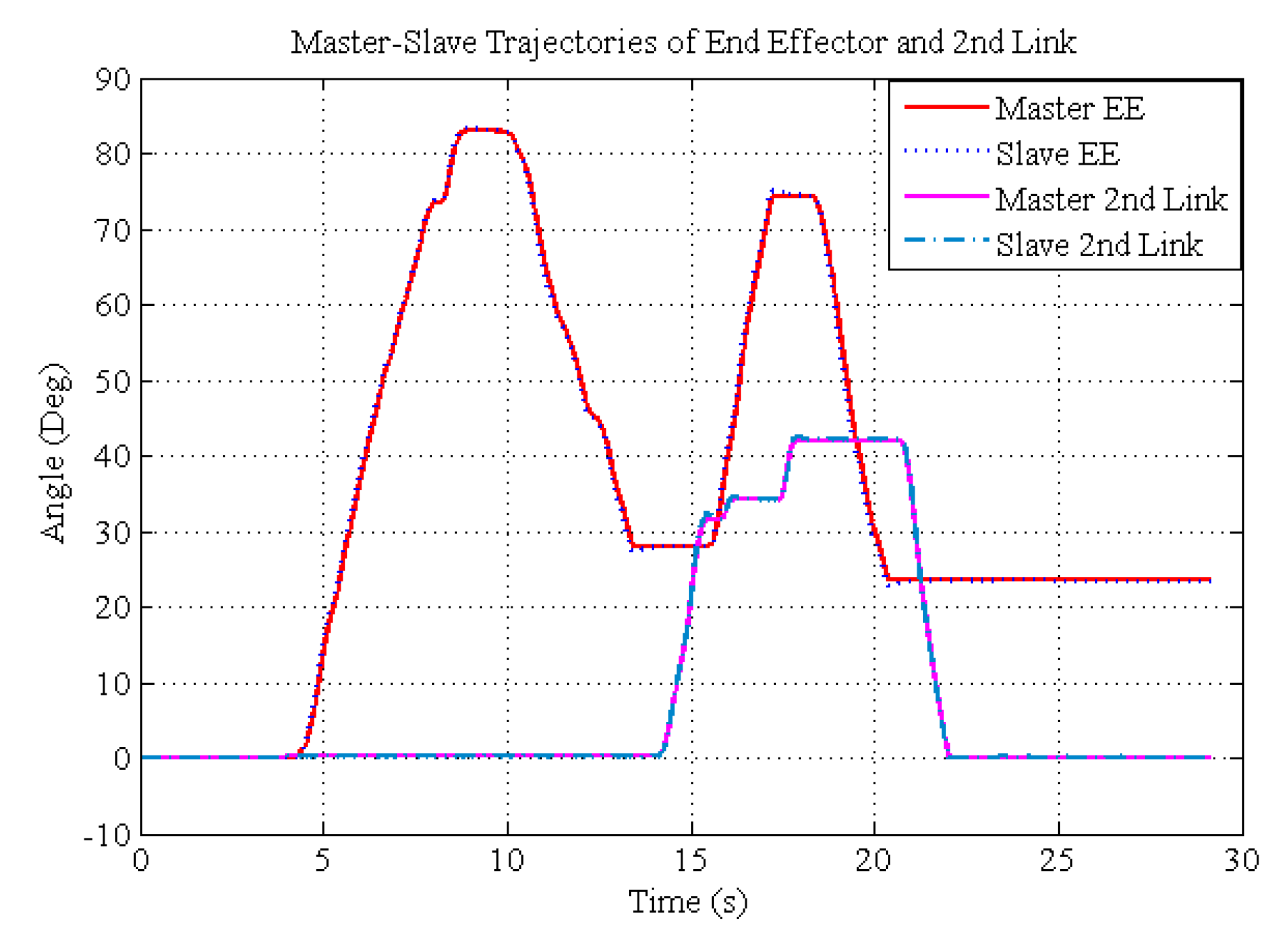
Figure 23 presents the experimental results for the end effector and the second link achieved using SMCSPO. At the start, for the first 4.1 s, the end effector and the 2
nd link could not move. After 4.1 s, only the end effector was able to move until 13.5 s. Again, the end effector and the 2
nd link could not move for another 0.7 s (i.e., from 13.5 to 14.2 s). Then, the 2
nd link moved separately for 1.3 s (i.e., from 14.2 to 15.5 s). After that, the end effector and the 2
nd link moved simultaneously for 6.5 s (i.e., from 15.5 to 22 s). Finally, the end effector and the 2
nd link could not move for 7.1 s (i.e., from 22 to 29.1 s). The slave device followed the trajectory of the master device accurately. The maximum trajectories of the end effector and the 2
nd link were 82.97 and 42.04 degrees, respectively.
7. Conclusions
This paper presented a methodology for estimating the reaction force for the base, 2nd link, and end effector of a 3DOF master and slave manipulator system. The advantageous feature of the proposed methodology is that it does not utilize any force sensors. In general, SMCSPO is implemented, whereby SMC-based tele-operated bilateral control and visual feedback generate the trajectory for the slave system with a minimum of tracking error. In addition, the tele-operated bilateral control strategy also estimates the reaction force of the master manipulator, which is used by the operator to control the master device.
The experimental results presented in this study indicate that the slave manipulator successfully tracked the master device with negligible error. It was also observed based on the results that the operator was able to feel the reaction force as the slave device touched/interacted with the environment, without the use of any feedback from force sensors. The maximum trajectories, error and perturbation between the master and the slave for the end effector, 2
nd link and base are summarized in
Table 4.
In the future, issues like latency and jitter in the global area network (GAN) should be addressed in order to enhance the tele-operation range. The area of application for this study was the dismantling of nuclear power plants, but the proposed method is not limited to this, as several other applications require master/slave systems in which human access is limited. These applications include hazardous areas with high levels of radiation from materials with long half-lives. Examples of this include transportation of uranium in its active form, the disposal of explosive material, handling of explosive/radioactive material, remote cutting for nuclear plant dismantling, etc.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}