1. Introduction
To conduct the cooperative target hunting by multi-AUV in an underwater environment, the AUVs not only need to take into account basic problems (such as searching, path planning) but also need to cooperate in order to catch the targets efficiently [
1]. The target hunting by multi-AUV has attracted much attention due to its complexity and significance [
2,
3]. Today, much research has been done on the multi-AUV hunting issue, and there are some approaches proposed that apply to this issue. Zhang et al. [
4] presented a hunting approach derived from the virtual structure. The advantage of the virtual structure approach is that the formation can be maintained very well while maneuvering. Rezaee et al. [
5] considered formation control of a team of mobile robots based on the virtual structure. The main advantage of this approach is that it is fairly easy to prescribe the coordinated behavior for the whole formation group and add a type of robustness to formation by using formation feedback.
However, the disadvantage of the virtual structure is that requiring the formation to act as a rigid virtual structure limits the class of potential applications.
Recently, some research has dealt the hunting process with simple obstacles. Yamaguchi [
6] proposed a method based on making troop formations for enclosing the target and presented a smooth time-varying feedback control law for coordinating motions for multi-robots. Pan [
7] has applied the improved reinforcement algorithm in the multi-robot hunting problem. However, in these studies, the hunting target is usually static.
For the shortcomings mentioned above, Ma [
8] proposed a cooperative hunting strategy with dynamic alliance to chase moving target. This method can shorten the completion time to some extent. Wang [
9] proposed a new hunting method with new definition concepts of occupy, overlapping angle and finally calculated an optimized path for hunting multi-robots, but the environment is too open, and the initial location of hunting robots is too close to a moving target.
Some work has been reported to adapt the leader-following algorithm to achieve target hunting. For example, Ni et al. [
10] presented a bio-inspired neural network model with formation strategy to complete the hunting task. Liang et al. [
11] proposed a leader-following formation control method for mobile robots with a directed tree topology. Qin et al. [
12] have used leader-following formation algorithm to guide multi-agent cooperation for hunting task. These algorithms are easy to understand and implement, since the coordinated team members only need to maneuver according to the leader. However, the leader-following algorithm is no explicit feedback from the followers to leader, and the failure of the leader leads to the failure of the whole formation team.
There are many neural network approaches proposed for target hunting. For examples, Garcia et al. [
13] proposed a simple ant colony optimization meta-heuristic (SACOdm) algorithm to solve the path planning problem of autonomous mobile robots. The SACOdm methods determine the robots’ path based on the distance from the source to the target nodes, where the ants remember the visited nodes. Zhu et al. [
14] proposed a hunting algorithm based on a bioinspired neural network. The hunting AUVs’ paths are guided through the bio-inspired neural network and the results show that it can achieve the desired hunting result efficiency. Sheng [
15] has proposed a method based on diffusion adaptation with network to research intelligent predators hunting for fish schools. Although neural networks can complete the hunting task, they often need to perform large amount of calculation, incurring prohibitive computational cost. Therefore, the neural network algorithm is not suitable for real-time system.
Potential field algorithms were proposed for real-time target hunting and became the most widely studied distributed control methods [
16]. In the potential field methods, it is assumed that the robots combine attraction with the goal, and repulsion from obstacles [
17,
18]. Artificial potential field (APF) algorithms were proposed for real-time path planning for robots to solve obstacle avoidance problem and became the most widely studied distributed control methods [
16,
17,
18]. In the APF methods, it is assumed that the robots combine attraction with the goal and repulsion from obstacles. Much work has been reported to adapt the APF algorithm to controlling swarm robots. Rasekhipour et al. [
19] introduces a model predictive path-planning controller to potential functions along with the vehicle dynamics terms. Ge et al. [
20] proposed formation tracking control based on potential field. However, the potential field algorithm is known for getting trapped easily in a local minimum.
This paper focuses on situation which the targets are intelligent and their motions are unpredicted and irregular. The multi-AUV hunting algorithm based on the improved potential field (IPF) is presented. The hunting AUVs’ paths are guided through potential field function, and the three degrees (the dispersion degree, the homodromous degree, and district-difference degree) are used to solve the target search and capture of AUVs in the whole hunting process. The proposed algorithm can overcome local minimum problem. The simulation results show that the hunting efficiency can be as desired.
The rest paper is organized as follows. The proposed improved potential field based integrated hunting algorithm is presented in
Section 2. The simulations for various situations are given in
Section 3. Finally, the conclusion is given in
Section 4.
2. The Improved Potential Field Approach
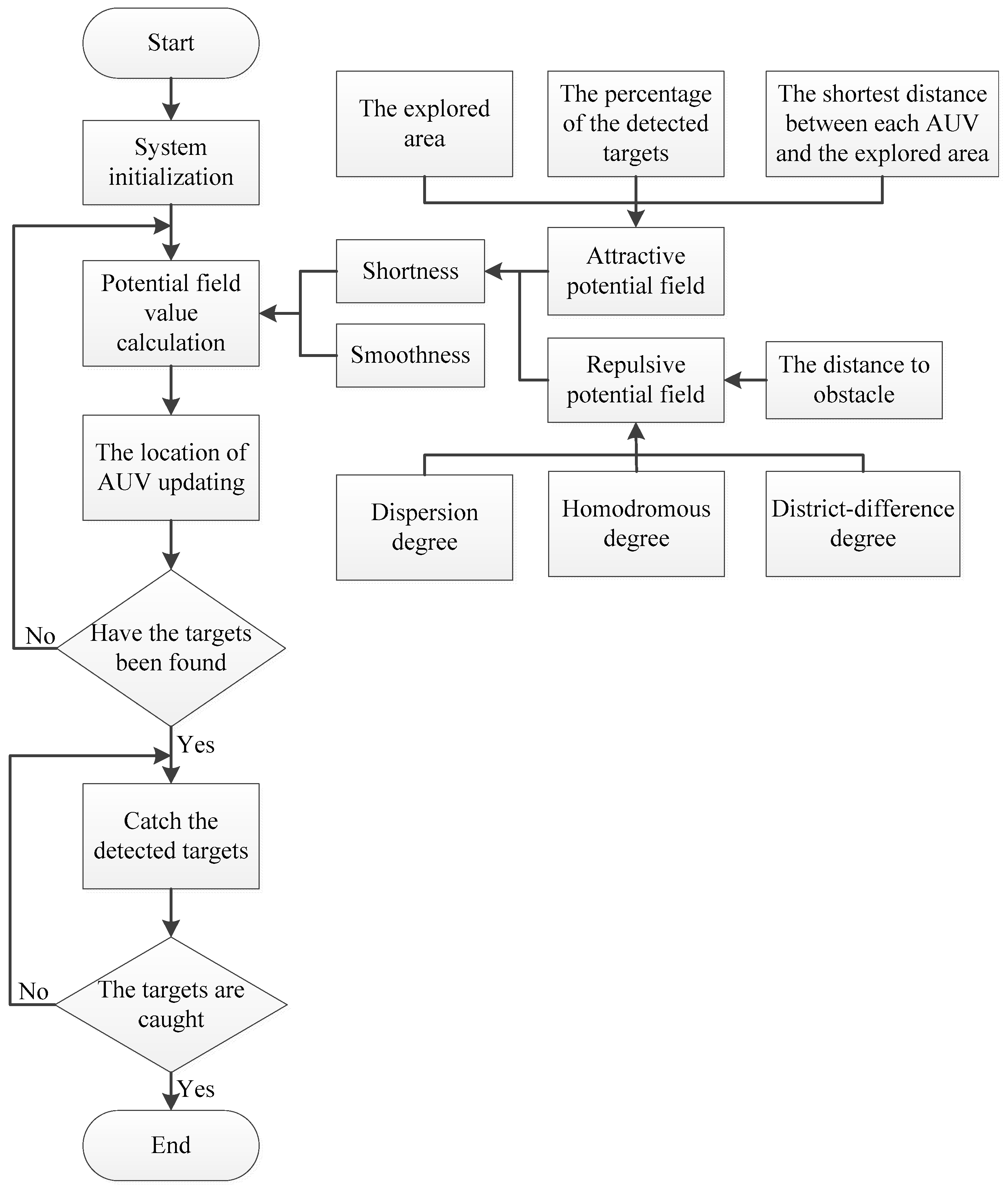
The potential field approach is a commonly used method for AUV path planning in a surface-water environment. However, the potential field approach is not cooperative when it is applied to target hunting. In this section, applying the cooperation method into potential field is a novel idea for multi-AUV cooperation target hunting. The flow of the target hunting task is shown in
Figure 1. In this approach, when one AUV detects the targets, the multi-AUV system will calculate the distance between the each AUV and the target and request the proper AUVs to accomplish the hunting tasks. At the same time, the three degrees (the dispersion degree, the homodromous degree, and district-difference degree) are introduced to increase the collaboration of multi-robot system.
In the scheme, the whole potential value
of AUV
can be defined as
where
denotes the attractive potential value,
represents the repellent potential value, and
and
are weights in the distance potential. In static environments,
can be set within a limited range, while in dynamic environments, a linear increasing value of
is applied.
The attractive potential
at position
of AUV
is defined as [
21]
where
and
are the position gain coefficients,
is the position of target
Tl,
l = 1, …,
N,
d0 denotes the shortest distance from the AUV to the explored area, and the item
is the relative distance between the AUV
and target
. The number of the detected targets is
while
is undetected targets number. The variable
denotes the area of the environment, while
represents the already explored area.
Because there are obstacles in the environment, the AUVs need to plan the collision-free paths to complete the task. In this case, the repulsive potential
is given by [
22]
where
and
are the density weights; and
,
and
are the dispersion degree, homodromous degree and district-difference degree respectively.
d is the nearest distance between the AUV and the detected obstacles.
d1 is the influence scope of obstacles.
is a position gain coefficient. The relative distance
between the AUV and target is added to the function, which ensures that the global minimum is only at the target in the entire potential field.
Dispersion degree
evaluates how close the robots are to each other by distance. If there are
m AUVs in a
area, the parameter
is calculated by a Gaussian function as [
23]
where
δ,
µ and
σ are calculated by [
24]
where
D is the real-time average distance between the AUVs; and
D(
i, f) is the distance between AUV
and
.
Homodromous degree
evaluates how close the AUVs are to others by direction. If there are
m AUVs and the AUV directions are
, where
. The parameter
is calculated by [
25]
where
is the number of possible moving directions of the AUV. In this study, each possible direction area is regarded as a bound area of 45° angle. Therefore, there are eight possible direction areas in the simulations. The function abs() is absolute value function.
The district-difference degree is used to judge whether all the AUVs stay in the same area. Especially when both
and
are large, the district-difference degree is applied to provide a proper repulsive potential value to keep the AUVs from gathering. In the actual search task, the environment is usually divided into different parts based on the number of targets and search resources. If both the percentages of undetected targets (denoted as
) and unexplored area (denoted as
) are high, the district-difference degree can help the AUVs to explore separately rather than gather too close to each other. In other words, the density of the robots in a small part of the environment is supposed to be low under this situation. For the calculation, the environment is divided into
parts
, where
is a square number and
. The value of district-difference degree can be obtained by [
26,
27]
where
,
and
are weights;
is the function to judge whether the AUV
is in the k-th part of the environment, which can be obtained by [
26,
27]
3. Simulation Studies
To demonstrate the effectiveness of the proposed approach for cooperative hunting by multi-AUV in surface-water environment, a simulation is conducted in MATLAB R2016a (The MathWorks, Inc., MA 01760-2098 UNITED STATES). In order to easy realization, the assumptions are as follows. (1) The turning radius of the AUV is ignorable in surface-water environment, thus the AUV is assumed to be able to move omni-directionally. (2) AUV is assumed to be able to recognize each other and identify their targets by the sonar. (3) The AUV velocity is set at a value more than the target velocity. (4) AUVs are capable of communicating with each other.
In this simulation, there are six AUVs, two targets, and several static obstacles of different size and shape. The area of the environment is
(m
2). AUVs and targets are allowed to move within the given space. Among them, targets move at random, and AUVs move at the proposed algorithm. When one target moves into any AUV’s sensing range, this target is regarded as being found.
Figure 2 shows the conditions where the target is successfully surrounded by hunting AUVs. When all targets have been surrounded by at least four AUVs, the targets are regarded as being caught, and the hunting task ends.
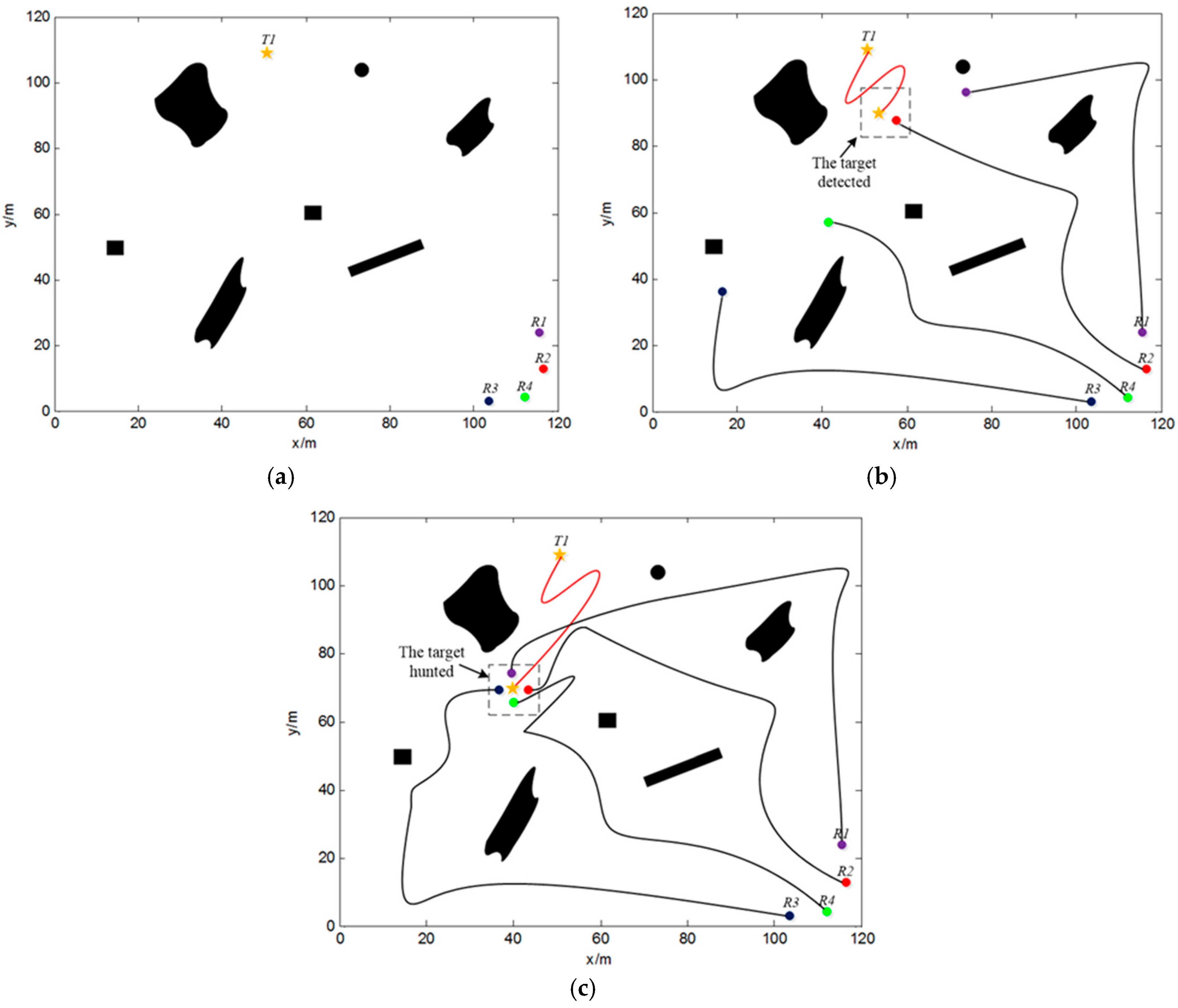
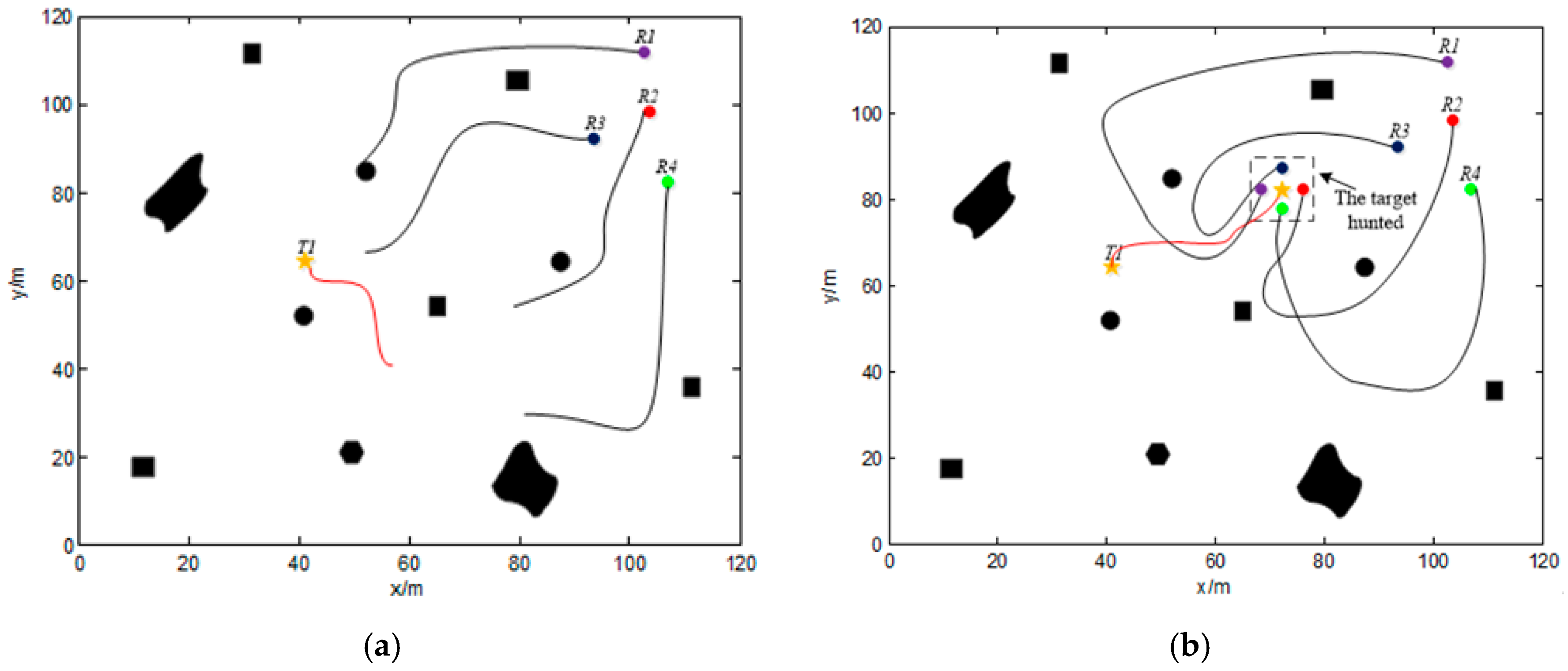
3.1. One Target
The first simulation is conducted to test the cooperative hunting process without obstacles. It is assumed that there are four hunting AUVs with only one target.
Figure 3a shows the initial locations and stage of hunting condition. At the beginning of the hunting task, AUVs search for targets in different directions based on the proposed algorithm. Targets move at random before being discovered. After a while, the target
T1 is found by the AUV
R2.
Figure 3b shows AUVs’ search trajectory for the target. Because the target has the same intelligence of AUV except the cooperation, target
T1 will escape. The AUV
R2 will track the target
T1 and send the location information of the target to other AUVs. According to the location of the target
T1, the proposed algorithm automatically plans a collision-free pursuing path for each hunter.
Figure 3c shows
R1,
R2,
R3, and
R4 hunting trajectory for the target
T1. Obviously, the simulation result shows that the proposed algorithm realizes cooperative hunting in surface-water experiments with obstacles.
In order to further validate the performance of the proposed algorithm, the Simulation of hunting process with dynamic obstacle is provided.
Figure 4 shows this process of four AUVs hunting target and avoid dynamic obstacles clearly. The results show in the
Figure 4, it validates that it is available to apply the proposed algorithm to the multi-AUV hunting task, and it can effectively avoid dynamic obstacle in path planning.
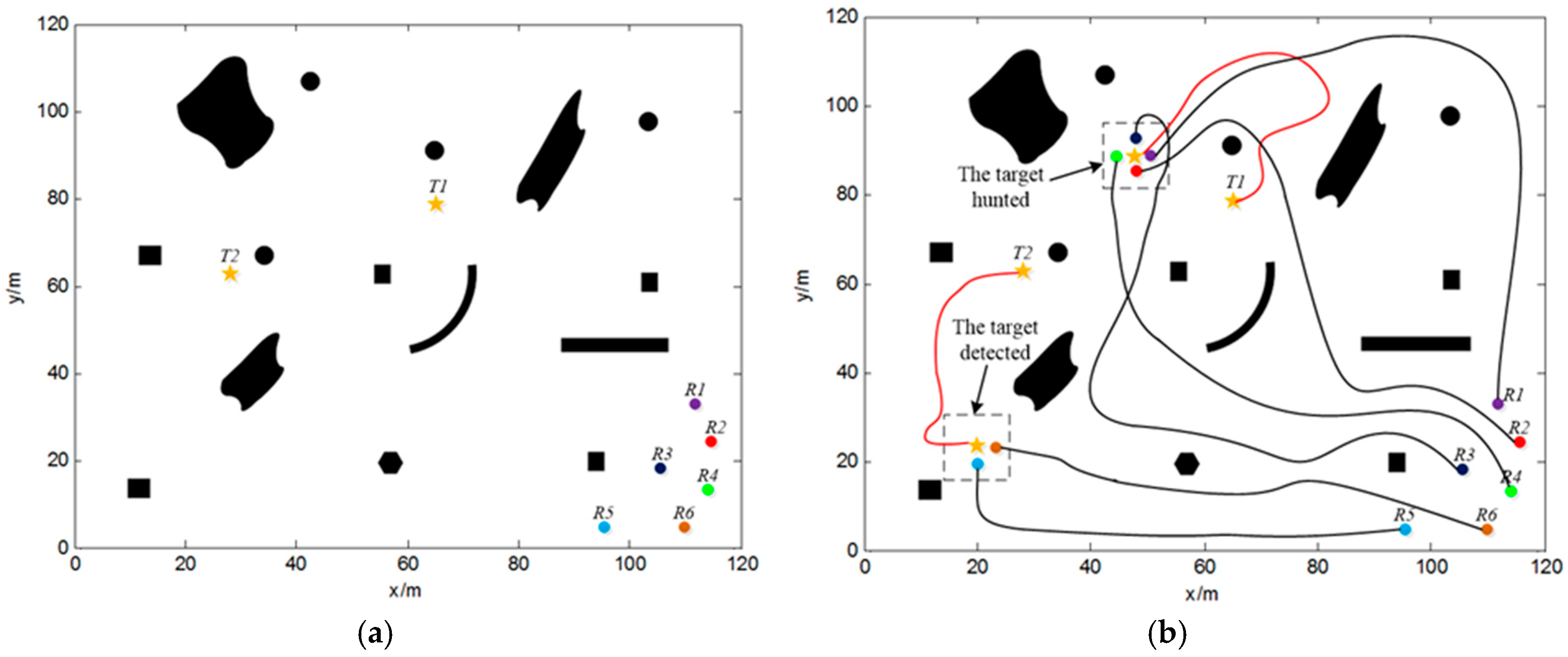
3.2. Multiple Targets
The second simulation is conducted to test the dynamic cooperation when two targets need to be caught. It is assumed that there are two targets and six AUVs.
Figure 5 shows this process of six AUVs hunting two targets clearly.
Figure 5a shows the distribution of AUVs, targets, and obstacles. As well as hunting one target, six AUVs began searching the work area in different directions.
Figure 5b shows AUVs’ search trajectory for the first target. Because the target has the same intelligence of AUV except the cooperation, target
T1 will escape. The AUV
R1 will track the target
T1 and send the location information of the target to other AUVs. According to the location of the target
T1. The multi-AUV system selects the four AUVs closest to the
T1.
R1,
R2,
R3, and
R4 are assigned to the target
T1. Since
R5 and
R6 fail in the competition, they will not join in the pursuing task but keep search target. After the completion of the task assignment, the proposed algorithm automatically plans a collision-free pursuing path for each hunter.
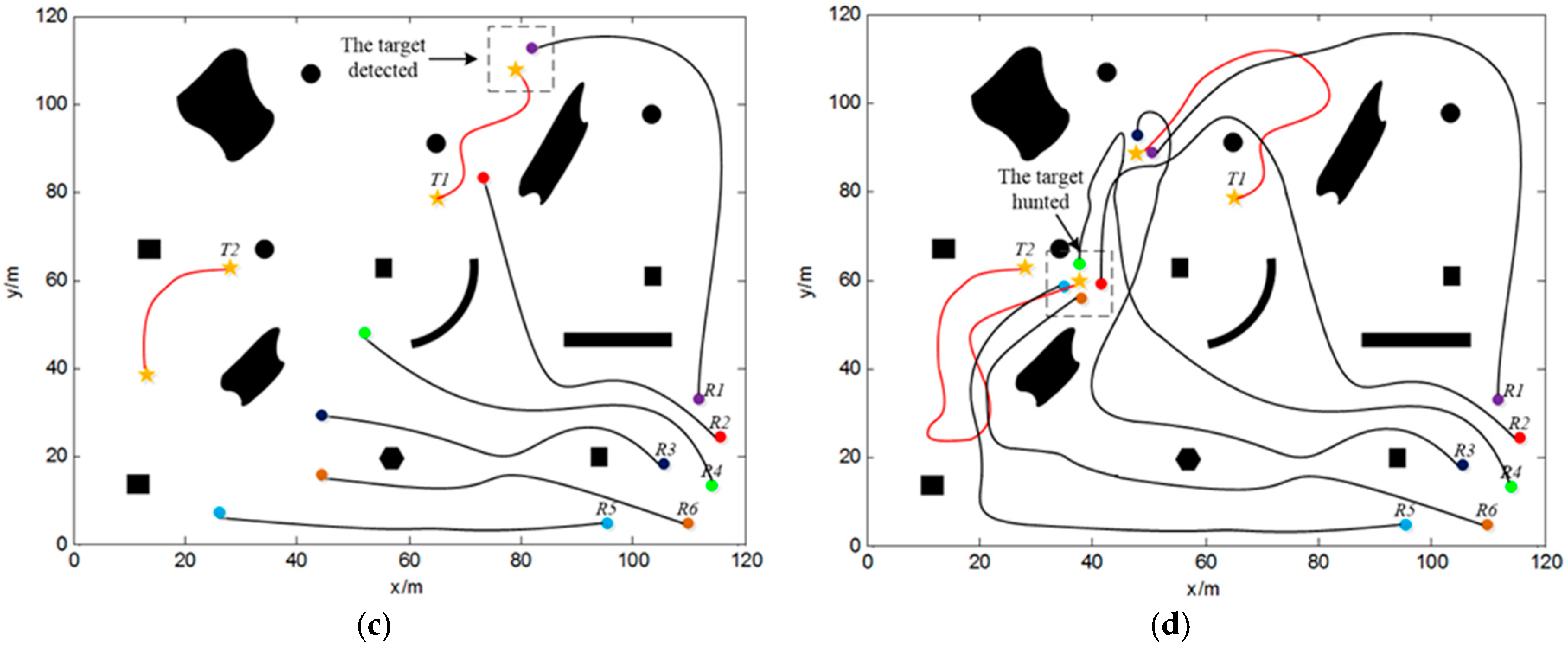
Figure 5c shows
R1,
R2,
R3, and
R4 hunting trajectory for the first target
T1. Same principle, the second target
T2 is found by the AUV
R5,
R6. The target
T2 is hunted by the AUV
R2,
R4,
R5, and
R6.
Figure 5d shows final trajectories of the AUVs hunting targets. Obviously, the simulation result shows that the proposed algorithm realizes multi-AUV cooperative hunting for two dynamic targets. The results show in the
Figure 5, it validates that it is available to apply the proposed algorithm to the multi-AUV hunting task, and it can effectively avoid AUV coordination conflict problem in path planning.
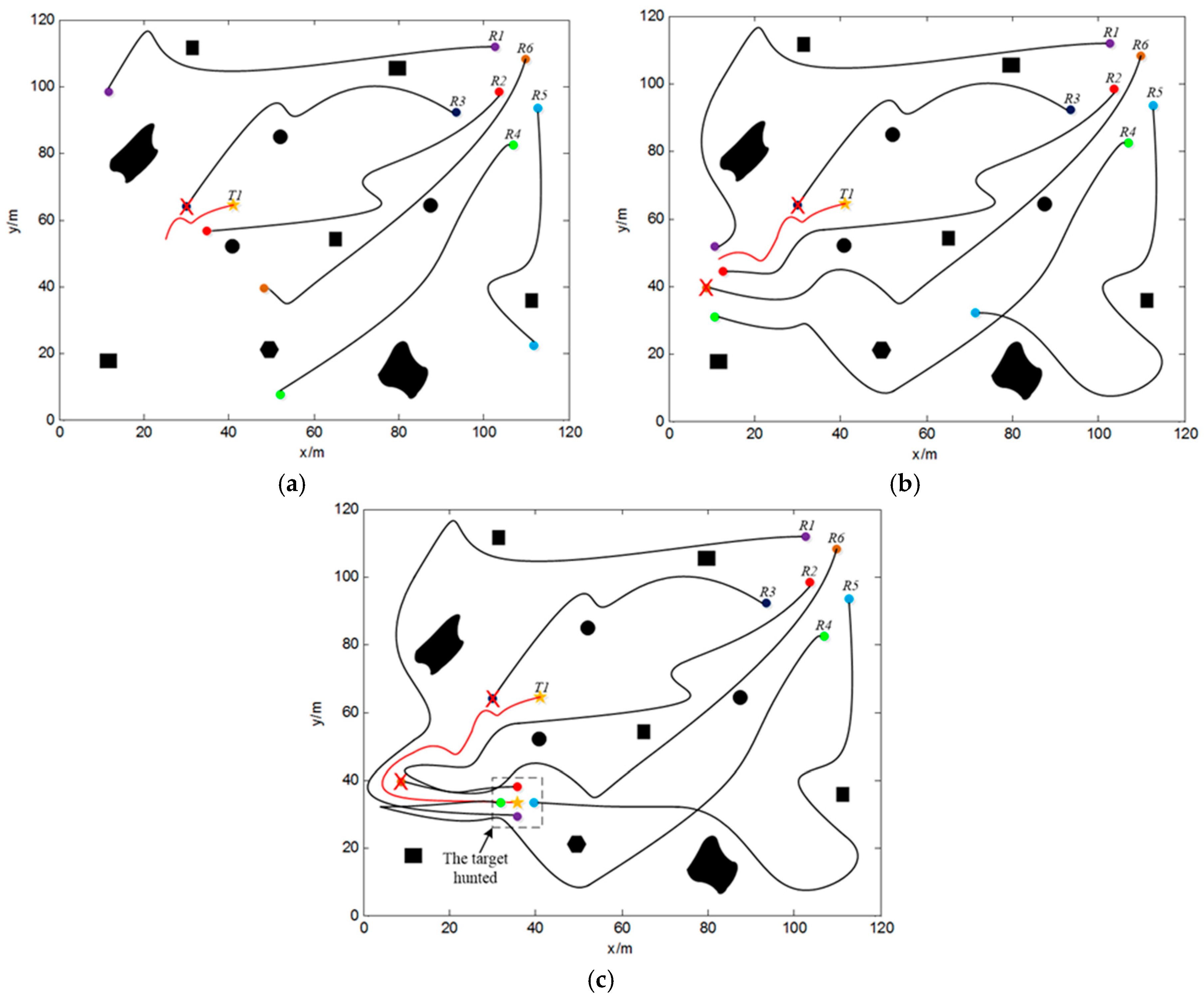
3.3. Some AUVs Break Down
To prove the robustness of proposed approach, some AUV failures are added in this part of simulation. When search in real surface-water workspaces, it is likely that two AUVs suddenly break down due to mechanical problems. and then it is an important index for measuring the proposed algorithm’s cooperation to see whether the multi-AUV work system could complete its search task through internal adjustment. In this case, the simulation deals with AUV failures in the same simulation environment as that in the
Section 3.2. There are six AUVs involved in search task for one target. At the beginning, six AUVs are normal search target in the surface-water workspaces. After a period of time, the target
T1 is found by the AUV
R3. The AUV
R3 will track the target
T1 and send the location information of the target to other AUVs. According to the location of the target
T1, the multi-AUV system selects the four AUVs closest to the
T1.
R1,
R2,
R3, and
R6 are assigned to the target
T1. Since
R4 and
R5 fail in the competition, they will not join in the pursuing task but keep search target. One of the AUVs,
R3, breaks down in time, but the remaining AUV members still function properly (shown as in
Figure 6a). Despite the breakdown of
R3, AUV
R4 replaces AUV
R3 by reassigning tasks, the whole team is not paralyzed but keeps working on for their hunting task. When coming to the 40th second, the AUV
R6 also fails (shown as in
Figure 6b). Since a distributed architecture is adopted, the rest one AUV
R5 will not be affected but go on with their hunt. And at last, the AUVs
R1,
R2,
R4, and
R5 got the target
T1. The final trajectories of the AUV team (see
Figure 6c) show that the proposed algorithm can work satisfactorily in the case of unexpected events, and it does not need any added changes for different situations. From this simulation, it shows that the improved potential field algorithm has the ability to complete search task in the case of AUV mechanical failures through dynamical allocation. This also demonstrates an excellent cooperation of the proposed algorithm.
3.4. Comparison of Different Algorithms
In order to further validate the performance of the proposed algorithm, it is compared with potential field (PF) algorithm. The comparison studies involve six AUVs, two targets, and some obstacles with environments scale of
(m
2). The target locations, AUVs and obstacles are randomly deployed. The both algorithms are applied to the multi-AUVs that are directed to hunt all the targets. In these conditions, the both algorithms simulation experiments of cooperative hunting were completed 50 times respectively. To make a clear distinction between the two algorithms,
Table 1 lists the mean and standard deviation statistics of total path length and hunting time by both algorithms. It is reasonable to conclude that the integrated algorithm of IPF performs better than the PF in each item of simulation results. Hence, it distinguishes itself with the shorter path length and time. By analysis, the PF algorithm doesn’t have the function of cooperation for AUVs. However, IPF can not only perform the target hunting, but also it can better complete the task in the environment filled with obstacles.
In order to further validate the performance of the proposed algorithm, comparison studies with the particle swarm optimization (PSO) algorithm will be carried out. The PSO algorithm plans a path by iteratively improving a candidate solution with regard to the fitness function. The comparison studies involve one target locations, four AUVs, and some obstacles with environments scale of
(m
2). The target locations, AUVs and obstacles are randomly deployed. Different algorithms are used to arrange the multi-AUVs to hunt target.
Figure 7 shows the search process with four different algorithms. According to the result of
Figure 7, the proposed algorithm completes the target hunting task. However, the PSO algorithm failed to hunt the target because R1 hits an obstacle.
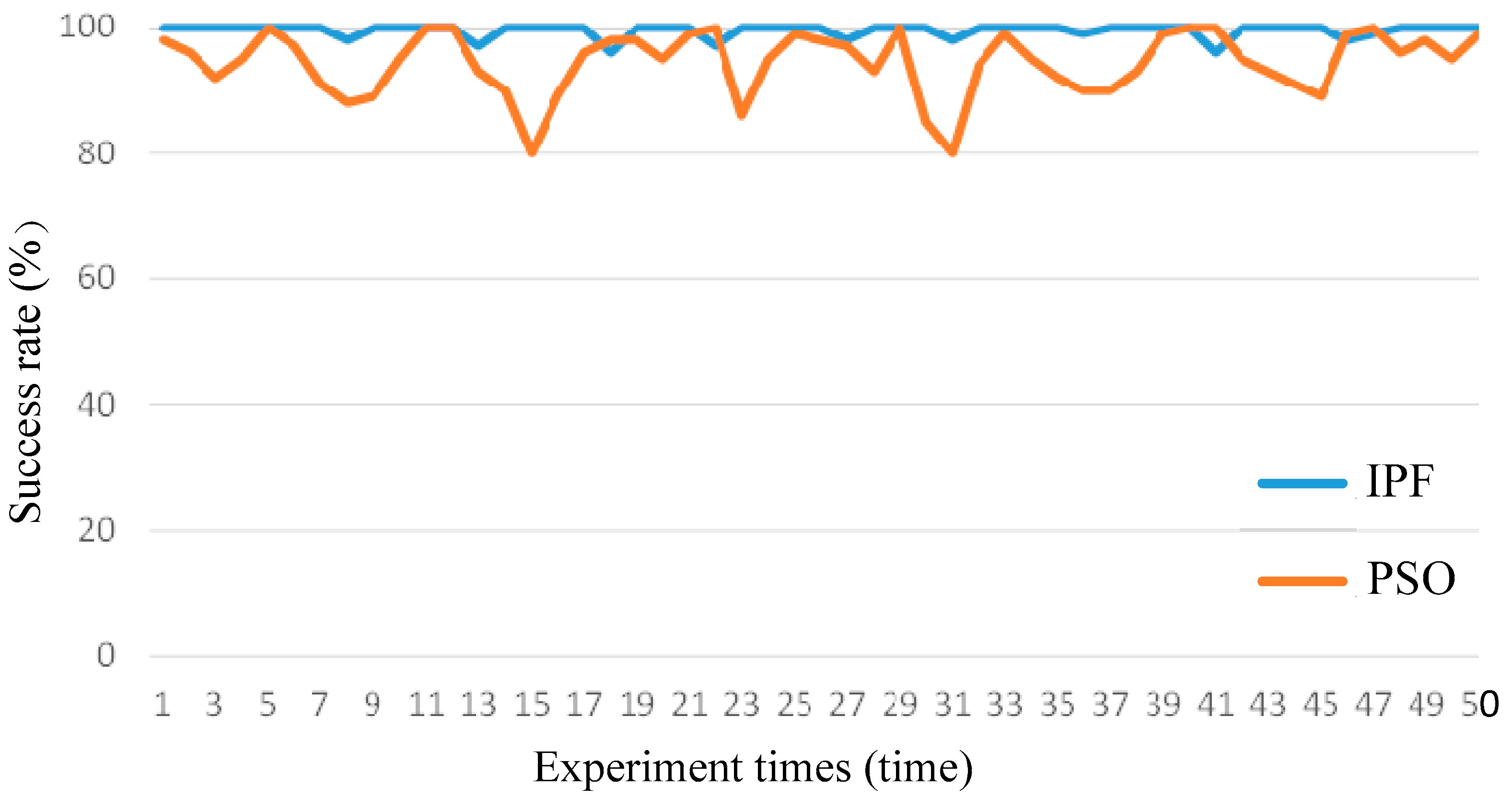
In order to ensure the accuracy of the experiments, we conducted the experiments many times. In each experiment, the positions of the obstacles, targets, and AUVs are reset. The success rate of performing 50 times of target hunting using two different algorithms is depicted in
Figure 7.
It is very clear to see that the proposed IPF algorithm reaches 100% success rate under a large number of experiments in
Figure 8. It means that the most tasks are successfully executed. However, the PSO algorithm only reaches 100% success rate for a few experiments. In some special cases, the success rate of PSO algorithm is only 80%. By comparison, it is found that under certain circumstances, the success rate of the proposed IPF algorithm is below 100%, but it is still superior to the PSO algorithm. By analysis, the PSO algorithm only provides optimum solution under no obstacle conditions. However, IPF works properly for obstacle avoidance, therefore it deserves a high success rate in the environments filled with obstacles.
4. Conclusions
In this paper, an integrated algorithm combining the potential field and the three degrees (the dispersion degree, the homodromous degree, and district-difference degree) is proposed to deal with cooperative target hunting by multi-AUV team in surface-water environment. On the one hand, it makes full use of the advantages of potential field, i.e., no pre-learning procedure and good real-time. On the other hand, the three degrees could improve the multi-AUV’s cooperation and overcome local minimum problem. Despite these advantages, there are still practical problems to be researched further. For example, how should AUVs overcome the effects of ocean currents in a surface-water environment during their hunting process. The real surface-water environment is three-dimensional, while, in this paper, many factors are simplified into a two-dimensional simulation. There is still a necessity to carry on further studies on how to solve these problems.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}