Adaptive Trajectory Tracking Control for Underactuated Unmanned Surface Vehicle Subject to Unknown Dynamics and Time-Varing Disturbances



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Formulation and Preliminaries
2.1. Problem Formulation
2.2. Neural Network Minimum Parameter Learning Method
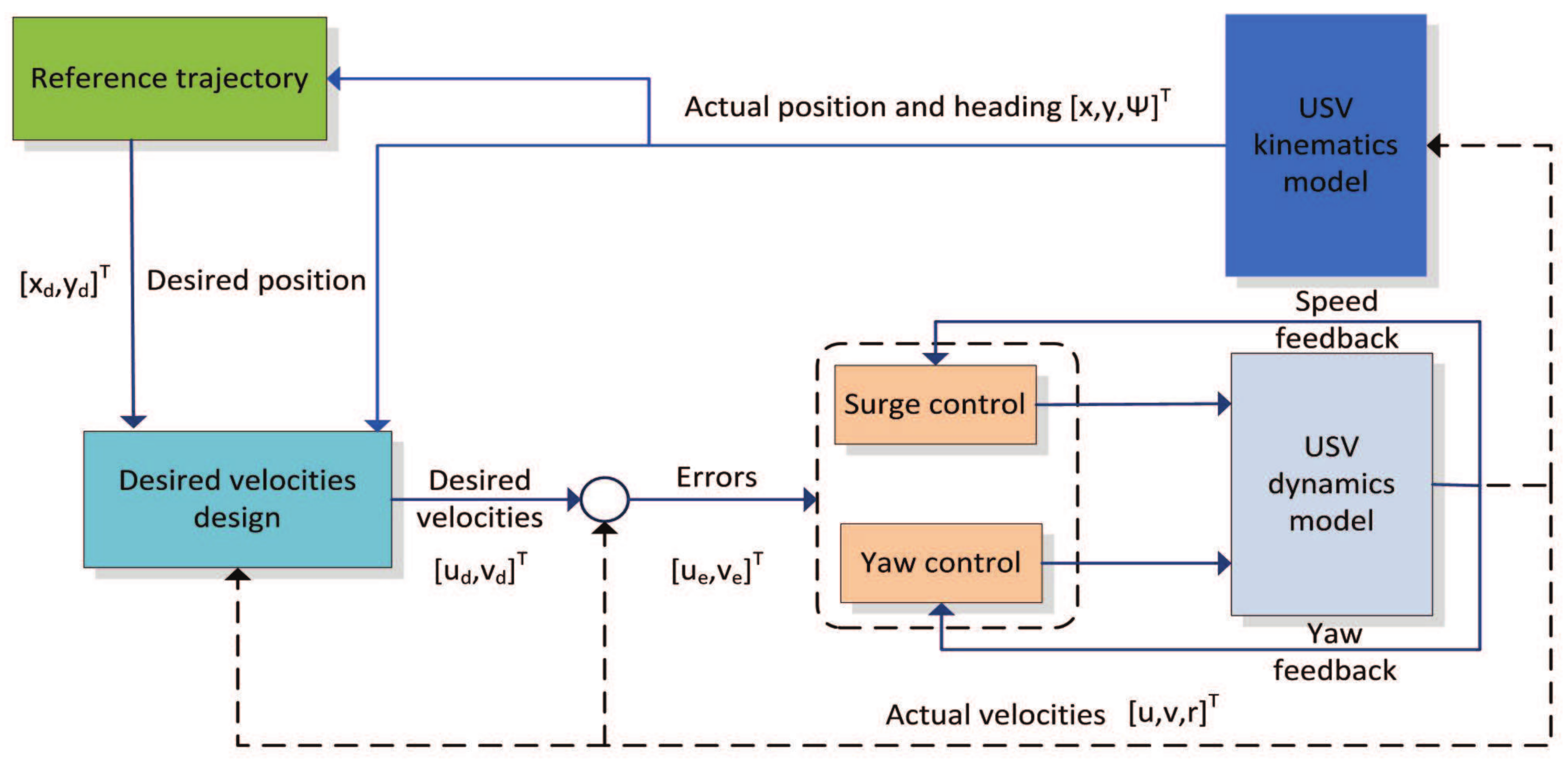
3. Trajectory Tracking Control Design
3.1. Surge Control Law
3.2. Yaw Rate Controller
4. Stability Analysis
5. Numerical Simulations
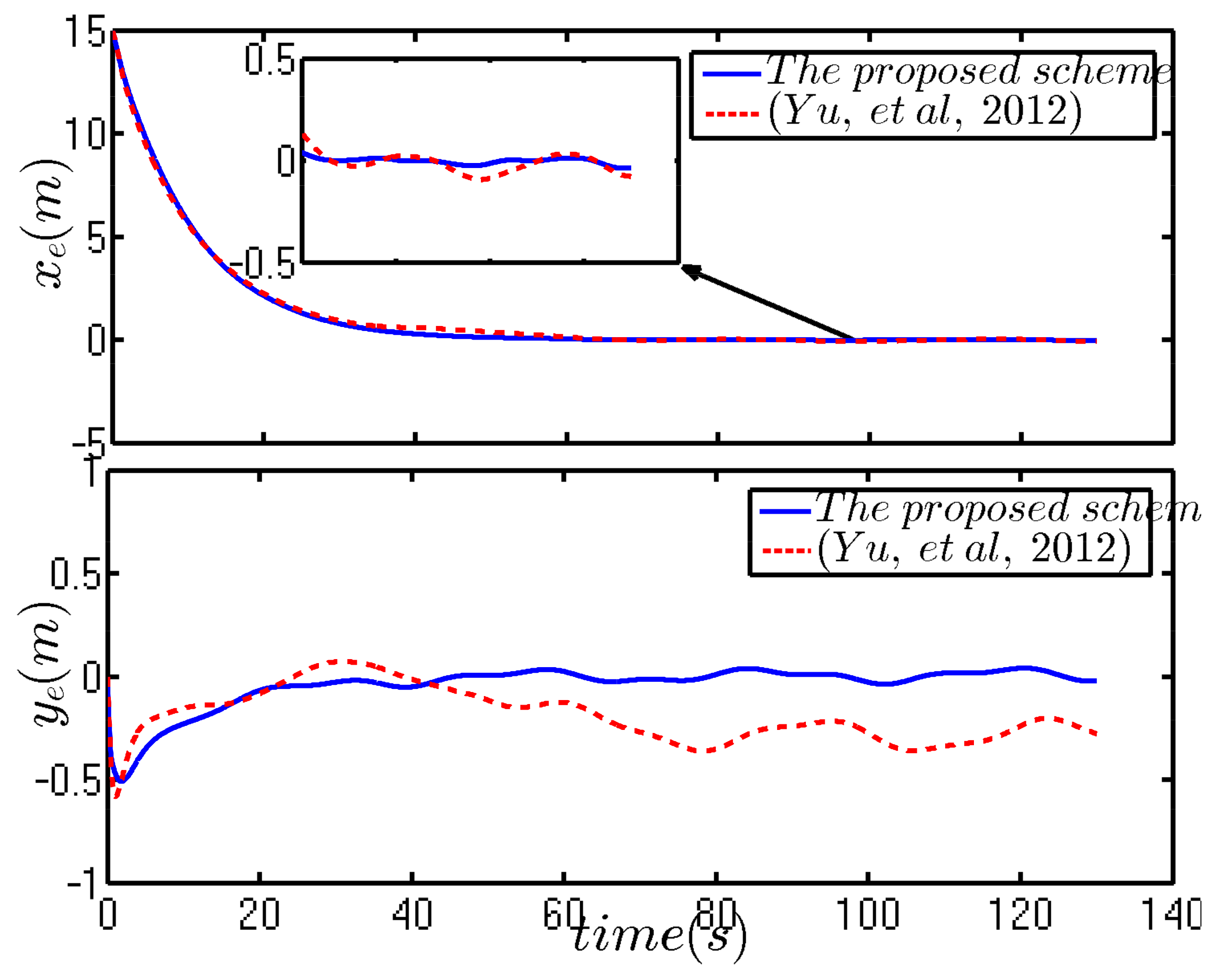
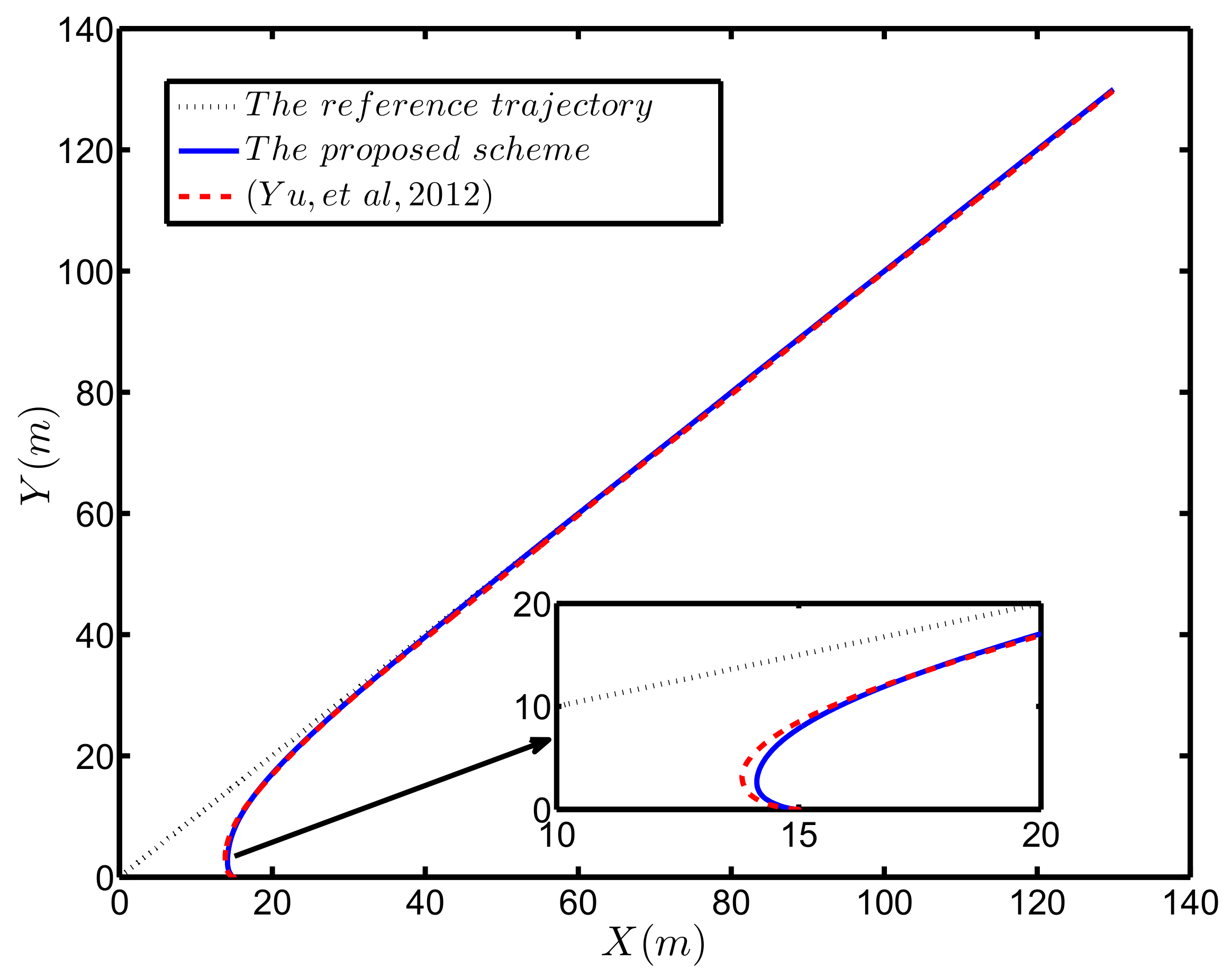
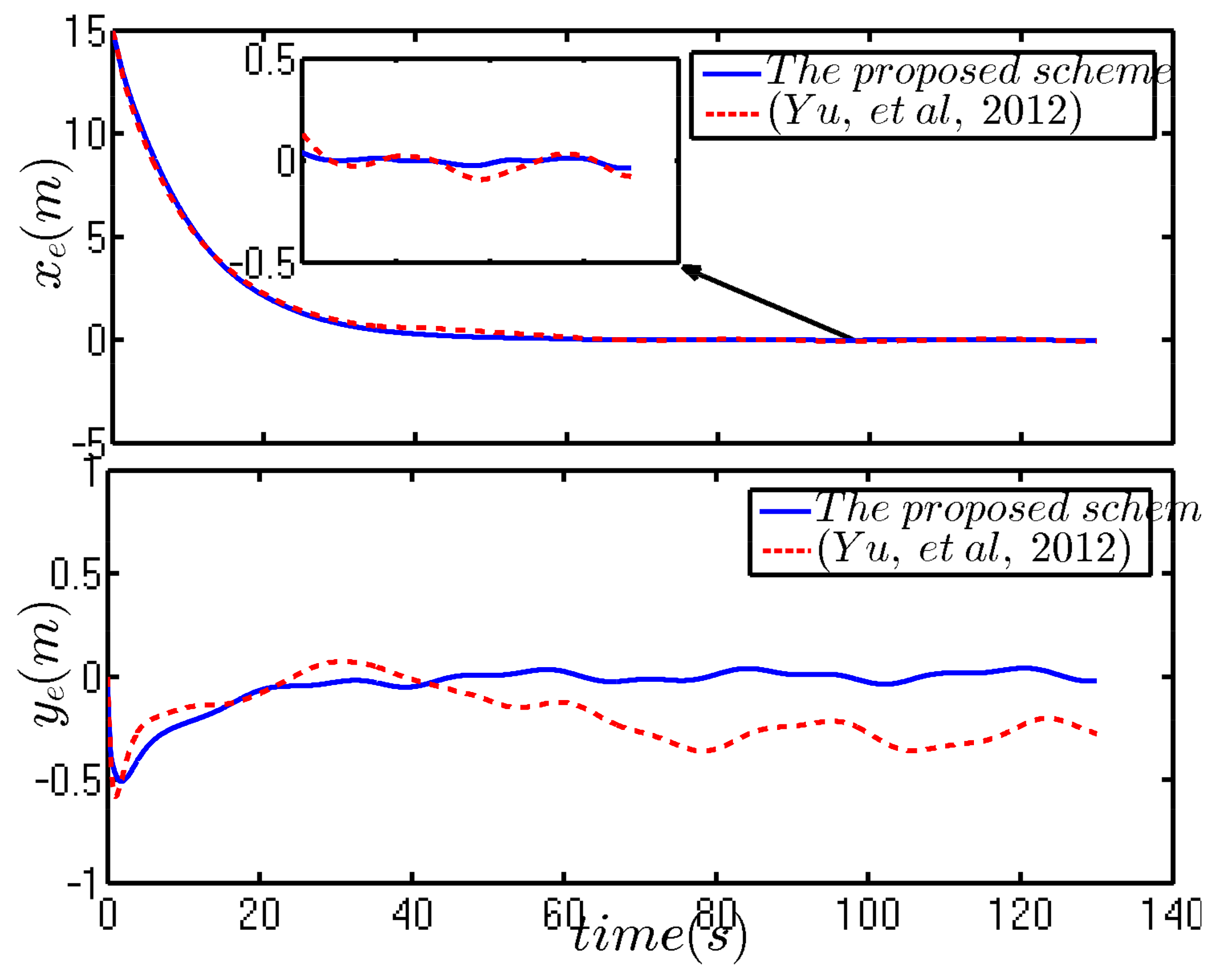
5.1. Tracking a Straight Line
5.2. Tracking a Circle
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| USV | unmanned surface vehicle |
| DSC | dynamic surface control |
| RBF | radial basis function |
| ASV | autonomous surface vehicle |
| DOF | degree of freedom |
| UUB | uniformly ultimately bounded |
| BP | back propagation |
| SMC | sliding mode control |
References
- Sinisterra, A.J.; Dhanak, M.R.; Ellenrieder, K.V. Stereovision-based target tracking system for USV operations. Ocean Eng. 2017, 133, 197–214. [Google Scholar] [CrossRef]
- Fan, Y.; Mu, D.; Zhang, X.; Wang, G.; Guo, C. Course keeping Control Based on Integrated Nonlinear Feedback for a USV with Pod-like Propulsion. J. Navig. 2018, 1–21. [Google Scholar] [CrossRef]
- Specht, C.; Świtalski, E.; Specht, M. Application of an Autonomous/Unmanned Survey Vessel (ASV/USV) in Bathymetric Measurements. Pol. Marit. Res. 2017, 24, 36–44. [Google Scholar] [CrossRef]
- Sun, X.; Wang, G.; Fan, Y.; Mu, D.; Qiu, B. An Automatic Navigation System for Unmanned Surface Vehicles in Realistic Sea Environments. Appl. Sci. 2018, 8, 193. [Google Scholar]
- Vivone, G.; Braca, P.; Horstmann, J. Knowledge-Based Multitarget Ship Tracking for HF Surface Wave Radar Systems. Trans. Geosci. Remote Sens. 2015, 53, 3931–3949. [Google Scholar] [CrossRef]
- Liu, C.; Zou, Z.; Hou, X. Stabilization And Tracking Of Underactuated Surface Vessels In Random Waves With Fin Based On Adaptive Hierarchical Sliding Mode Technique. Asian J. Control 2015, 16, 1492–1500. [Google Scholar] [CrossRef]
- Gao, T.; Huang, J.; Zhou, Y.; Song, Y.D. Robust adaptive tracking control of an underactuated ship with guaranteed transient performance. Int. J. Syst. Sci. 2016, 48, 272–279. [Google Scholar] [CrossRef]
- Do, K.D. Global robust adaptive path-tracking control of underactuated ships under stochastic disturbances. Ocean Eng. 2016, 111, 267–278. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, X. Concise Robust Adaptive Path-Following Control of Underactuated Ships Using DSC and MLP. IEEE J. Ocean. Eng. 2014, 39, 685–694. [Google Scholar] [CrossRef]
- Jiang, Z.P. Controlling Underactuated Mechanical Systems: A Review and Open Problems. In Advances in the Theory of Control, Signals and Systems with Physical Modeling; Springer: Berlin/Heidelberg, Germany, 2010; pp. 77–88. [Google Scholar]
- Zheng, Z.W.; Huo, W. Trajectory tracking control for underactuated stratospheric airship. Adv. Space Res. 2012, 50, 906–917. [Google Scholar] [CrossRef]
- Harmouche, M.; Laghrouche, S.; Chitour, Y. Global tracking for underactuated ships with bounded feedback controllers. Int. J. Control 2014, 87, 2035–2043. [Google Scholar] [CrossRef]
- Do, K.D.; Pan, J. Underactuated ships follow smooth paths with Integral actions and without velocity measurements for feedback: Theory and experiments. IEEE Trans. Control Syst. Technol. 2006, 14, 308–322. [Google Scholar] [CrossRef]
- Ghommam, J.; Mnif, F.; Derbel, N. Global stabilisation and tracking control of underactuated surface vessels. IET Control Theory Appl. 2010, 4, 71–88. [Google Scholar] [CrossRef]
- Chwa, D. Global Tracking Control of Underactuated Ships With Input and Velocity Constraints Using Dynamic Surface Control Method. IEEE Trans. Control Syst. Technol. 2011, 19, 1357–1370. [Google Scholar] [CrossRef]
- Sonnenburg, C.R.; Woolsey, C.A. Modeling, Identification, and Control of an Unmanned Surface Vehicle. J. Field Robot. 2013, 30, 371–398. [Google Scholar] [CrossRef]
- Wu, Y.; Zhang, Z.; Xiao, N. Global Tracking Controller for Underactuated Ship via Switching Design. J. Dyn. Syst. Meas. Control 2014, 136, 054506. [Google Scholar] [CrossRef]
- Dong, Z.; Wang, L.; Li, Y.; Liu, T.; Zhang, G. Trajectory tracking control of underactuated USV based on modified backstepping approach. Int. J. Nav. Archit. Ocean Eng. 2015, 7, 817–832. [Google Scholar] [CrossRef]
- Yang, Y.; Du, J.; Liu, H.; Guo, C.; Abrahham, A. A trajectory tracking robust controller of surface vessels with disturbance uncertainties. IEEE Trans. Control Syst. Technol. 2014, 22, 1511–1518. [Google Scholar] [CrossRef]
- Liu, C.; Zou, Z.; Yin, J. Trajectory tracking of underactuated surface vessels based on neural network and hierarchical sliding mode. J. Mar. Sci. Technol. 2015, 20, 322–330. [Google Scholar] [CrossRef]
- Yu, R.; Zhu, Q.; Xia, G.; Liu, Z. Sliding mode tracking control of an underactuated surface vessel. IET Control Theory Appl. 2012, 6, 461–466. [Google Scholar] [CrossRef]
- Mu, D.; Wang, G.; Fan, Y.; Sun, X.; Qiu, B. Adaptive LOS Path Following for a Podded Propulsion Unmanned Surface Vehicle with Uncertainty of Model and Actuator Saturation. Appl. Sci. 2017, 7, 1232. [Google Scholar] [CrossRef]
- Hassan, M.; Hamada, M. A Neural Networks Approach for Improving the Accuracy of Multi-Criteria Recommender Systems. Appl. Sci. 2017, 7, 868. [Google Scholar] [CrossRef]
- Li, Y.; Tong, S. Adaptive Fuzzy Output Constrained Control Design for Multi-Input Multioutput Stochastic Nonstrict-Feedback Nonlinear Systems. IEEE Trans. Cybern. 2017, 47, 4086–4095. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Tong, S. Fuzzy Adaptive Control Design Strategy of Nonlinear Switched Large-Scale Systems. IEEE Trans. Syst. Man Cybern. Syst. 2017, 99, 107–117. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, X. Concise adaptive fuzzy control of nonlinearly parameterized and periodically time-varying systems via small gain theory. Int. J. Control Autom. Syst. 2016, 14, 1–13. [Google Scholar] [CrossRef]
- Pan, C.Z.; Lai, X.Z.; Yang, S.X.; Wu, M. An efficient neural network approach to tracking control of an autonomous surface vehicle with unknown dynamics. Expert Syst. Appl. Int. J. 2013, 40, 1629–1635. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; Wiley: New York, NY, USA, 2011; ISBN 978-1119991496. [Google Scholar]
- Liu, C.; Ding, W.; Li, Z.; Yang, C. Prediction of high-speed grinding temperature of titanium matrix composites using BP neural network based on PSO algorithm. Int. J. Adv. Manuf. Technol. 2016, 89, 1–9. [Google Scholar] [CrossRef]
- Jiang, G.; Luo, M.; Bai, K.; Chen, S. A Precise Positioning Method for a Puncture Robot Based on a PSO-Optimized BP Neural Network Algorithm. Appl. Sci. 2017, 7, 969. [Google Scholar] [CrossRef]
- Mu, D.D.; Wang, G.F.; Fan, Y.S. Design of Adaptive Neural Tracking Controller for Pod Propulsion Unmanned Vessel Subject to Unknown Dynamics. J. Electr. Eng. Technol. 2017, 12, 2365–2377. [Google Scholar]
- Zhang, G.; Zhang, X. A novel DVS guidance principle and robust adaptive path-following control for underactuated ships using low frequency gain-learning. ISA Trans. 2015, 56, 75–85. [Google Scholar] [CrossRef] [PubMed]
- Emelyanov, S.V. Automatic control systems with variable structure. Autom. Control Syst. Var. Struct. 1970, 4, 75–85. [Google Scholar]
- Khosravi, S.; Jahangir, M.; Afkhami, H. Adaptive Fuzzy SMC-Based Formation Design for Swarm of Unknown Time-Delayed Robots. Nonlinear Dyn. 2012, 4, 139–143. [Google Scholar] [CrossRef]
- Li, S.; Wang, Y.; Tan, J.; Zheng, Y. Adaptive RBFNNs/integral sliding mode control for a quadrotor aircraft. Neurocomputing 2016, 216, 126–134. [Google Scholar] [CrossRef]
- Mu, D.; Wang, G.; Fan, Y.; Zhao, Y. Modeling and Identification of Podded Propulsion Unmanned Surface Vehicle and Its Course Control Research. Math. Probl. Eng. 2017, 2, 1–13. [Google Scholar] [CrossRef]
- Ashrafiuon, H.; Muske, K.R.; Mcninch, L.C.; Soltan, R.A. Sliding-Mode Tracking Control of Surface Vessels. IEEE Trans. Ind. Electron. 2008, 55, 4004–4012. [Google Scholar] [CrossRef]
- Iqbal, J.; Zuhaib, K.; Han, C.; Khan, A.; Ali, M. Adaptive Global Fast Sliding Mode Control for Steer-by-Wire System Road Vehicles. Appl. Sci. 2017, 7, 738. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, X.; Zheng, Y. Adaptive neural path-following control for underactuated ships in fields of marine practice. Ocean Eng. 2015, 104, 558–567. [Google Scholar] [CrossRef]
- Li, J.H.; Lee, P.M.; Jun, B.H.; Lin, Y.K. Point-to-point navigation of underactuated ships. Automatica 2008, 44, 207–214. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D.; Peng, Z. Path following of marine surface vehicles with dynamical uncertainty and time-varying ocean disturbances. Neurocomputing 2016, 173, 799–808. [Google Scholar] [CrossRef]
- Pan, C.Z.; Lai, X.Z.; Yang, S.X.; Wu, M. A biologically inspired approach to tracking control of underactuated surface vessels subject to unknown dynamics. Expert Syst. Appl. Int. J. 2015, 42, 2153–2161. [Google Scholar] [CrossRef]
- Hu, X.; Du, J.; Sun, Y. Robust Adaptive Control for Dynamic Positioning of Ships. IEEE J. Ocean. Eng. 2017, 99, 1–10. [Google Scholar] [CrossRef]
- Du, J.; Hu, X.; Krstić, M.; Sun, Y. Robust dynamic positioning of ships with disturbances under input saturation. Automatica 2016, 73, 207–214. [Google Scholar] [CrossRef]
- Lefeber, E.; Pettersen, K.Y.; Nijmeijer, H. Tracking control of an underactuated ship. IEEE Trans. Control Syst. Technol. 2003, 11, 52–61. [Google Scholar] [CrossRef]



© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mu, D.; Wang, G.; Fan, Y.; Qiu, B.; Sun, X. Adaptive Trajectory Tracking Control for Underactuated Unmanned Surface Vehicle Subject to Unknown Dynamics and Time-Varing Disturbances. Appl. Sci. 2018, 8, 547. https://doi.org/10.3390/app8040547
Mu D, Wang G, Fan Y, Qiu B, Sun X. Adaptive Trajectory Tracking Control for Underactuated Unmanned Surface Vehicle Subject to Unknown Dynamics and Time-Varing Disturbances. Applied Sciences. 2018; 8(4):547. https://doi.org/10.3390/app8040547
Chicago/Turabian StyleMu, Dongdong, Guofeng Wang, Yunsheng Fan, Bingbing Qiu, and Xiaojie Sun. 2018. "Adaptive Trajectory Tracking Control for Underactuated Unmanned Surface Vehicle Subject to Unknown Dynamics and Time-Varing Disturbances" Applied Sciences 8, no. 4: 547. https://doi.org/10.3390/app8040547