Optical 3D scanning technologies have been successfully applied for achieving 3D measurements in many fields such as the automotive industry [
7]. Optical scanning technologies based on laser and white light have increasingly been utilized in designing the most effective and efficient handheld scanners. The primary benefits of handheld scanners are their portability and higher acquisition speeds. For some users, the cost also plays a significant role when it comes to selecting a particular device for the given application. For example, Tong J., et al. employed a low cost 3D data-acquisition technique based on the Microsoft Kinect sensor [
10]. This scanning system was used for capturing the complete 3D human body using multiple Kinect sensors. They employed two Kinect sensors to capture the upper part and lower part of the body, while the third Kinect sensor was used to capture the middle part of the body. This low-priced system produced very good results in a relatively short time, and demonstrated the importance of performing a comparative evaluation (keeping in mind the application requirements) of all available systems before making a final decision. Besides low costs, other user requirements may include high-density points and the ability to measure deep features or internal cavities, short times, high accuracy, etc. [
11]. The different user requirements and varying capabilities of each system demand a discrete assessment of the individual scanners, as well as a comparative evaluation of the several available scanning systems. There is a plethora of existing research in which the effects of scanning parameters were investigated and the RE process was evaluated. For example, Al-Ahmari and Aalam (2015) employed design of experimental techniques to optimize surface reconstruction parameters in the RE of free-form surfaces [
12]. The authors investigated the effects of noise reduction, number of points, triangle count, and sampling on the surface accuracy, computational time, and computer memory. The case study involved two types of point clouds, which were obtained using a fixed Coordinate Measuring Machine (CMM) laser line scanner and a portable CMM laser line scanner. Similarly, Mian et al. (2014) investigated the performance of three different scanning techniques, including a laser line scanning probe, an active scanning probe, and a passive scanning probe attached to a bridge-type CMM [
13]. The Taguchi approach was used in the experimental design to determine the appropriate values for the scanning parameters to achieve the shortest scanning time and lowest error. To evaluate the effect of laser scanning parameters, as well as the object position and angle on the scanner accuracy, Gerbino et al. (2016) [
14] also employed design of experiment methodology. They used Geomagics software to evaluate the accuracy of scanning objects. Contact and non-contact systems (based on laser digitizing) have also been compared by Martınez S., et al. (2010) to study dimensional accuracy [
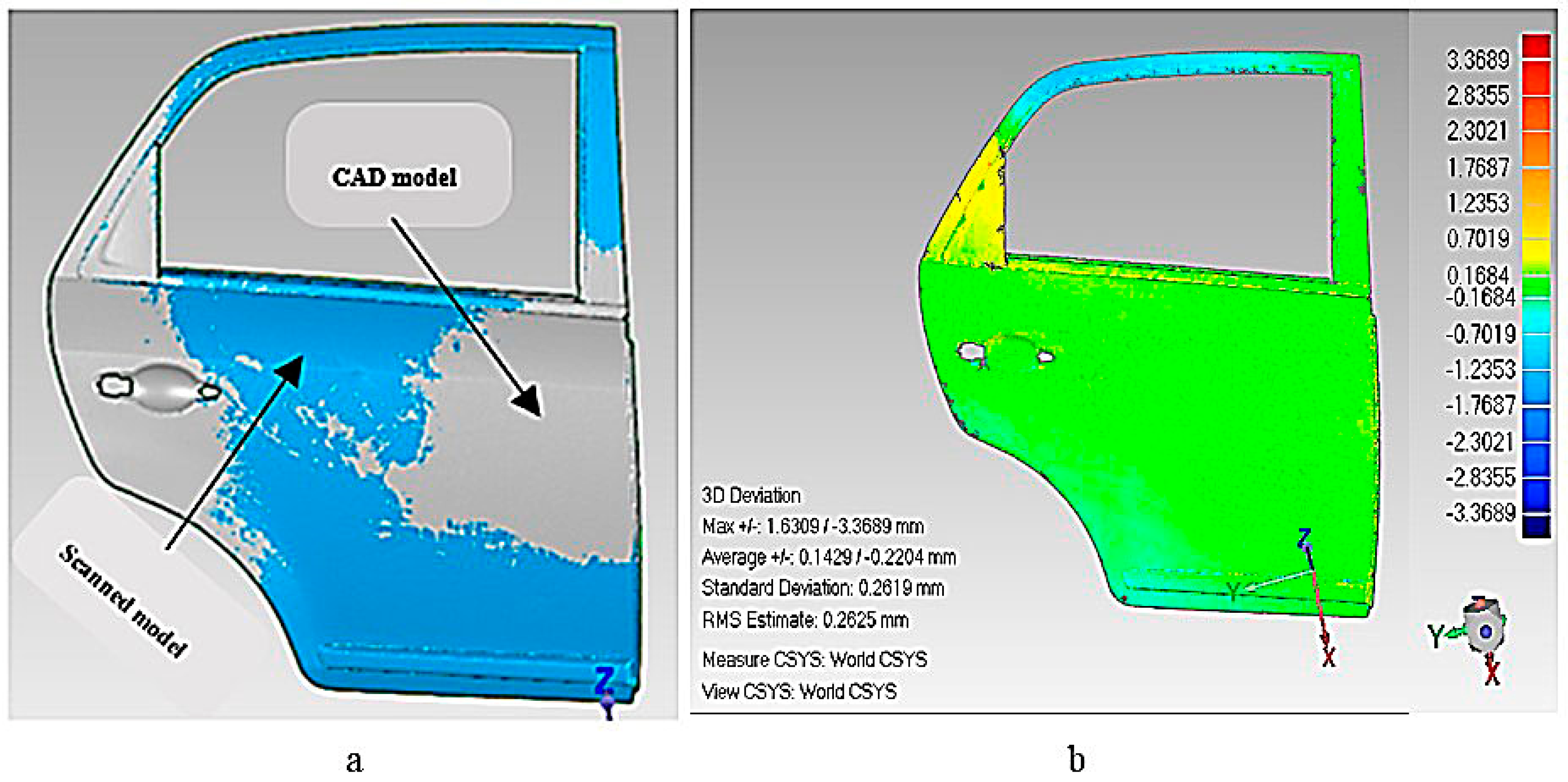
15]. Tóth and Živčák (2014) studied the Steinbichler Comet L3D optical scanner and the Creaform EXAscan laser scanner for a comparative evaluation [
16]. They used Volume Graphics VGStudio MAX 2.2 software to evaluate the deviation between the scanned models and the CAD model. The Analytic Hierarchy Process, which has powerful comparison capabilities, may also be used in addition to the design of experiment approach. For example, Duss A. (2012) employed Analytic Hierarchy Process to investigate the capabilities (accuracy, repeatability, measuring speed, work envelope, and ease of use) of four different RE hardware systems [
11]. Moreover, to evaluate the performance of the several contactless data acquisition devices, Iuliano L., et al. (2010) designed a reference part using basic geometries and free-form surfaces [
17]. They compared the two systems by considering the dimensional and geometrical tolerances, as well as other quantitative and qualitative criteria. Additionally, three calibrated test parts (a sphere, cylinder, and gauge block) were utilized by Barbero and Ureta (2011) to compare the accuracy of five 3D scanners [
18]. On the basis of their study, they concluded that the scanners that used white light (Comet, Atos) provided the highest accuracy. A structured methodology developed by Minetola P., et al. (2015) was used to compare different RE programs applicable to inspection activities [
19]. Six RE software programs, including PointMaster v.5.3.3, Gom Inspect v.7.5, Geomagic Qualify v.12, 3D Reshaper v.7.1, Rapidform XOV2, and Polyworks Inspector v.12 were compared to evaluate their performances. In recent times, Pagliarulo et al. (2017) [
20] have combined the data from Electronic Speckle Pattern Interferometry (ESPI) with laser scanning data for 3D characterization of racing tyres sections.
A comparative evaluation of different systems is highly valuable when several options are available for a particular application. To conduct a reliable assessment, a robust tool or technique such as design of experiment must be employed. Therefore, in this work, handheld laser and white light scanners have been evaluated (for an automotive application) using a design of experiment approach.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}