Collision Avoidance from Multiple Passive Agents with Partially Predictable Behavior

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Contribution
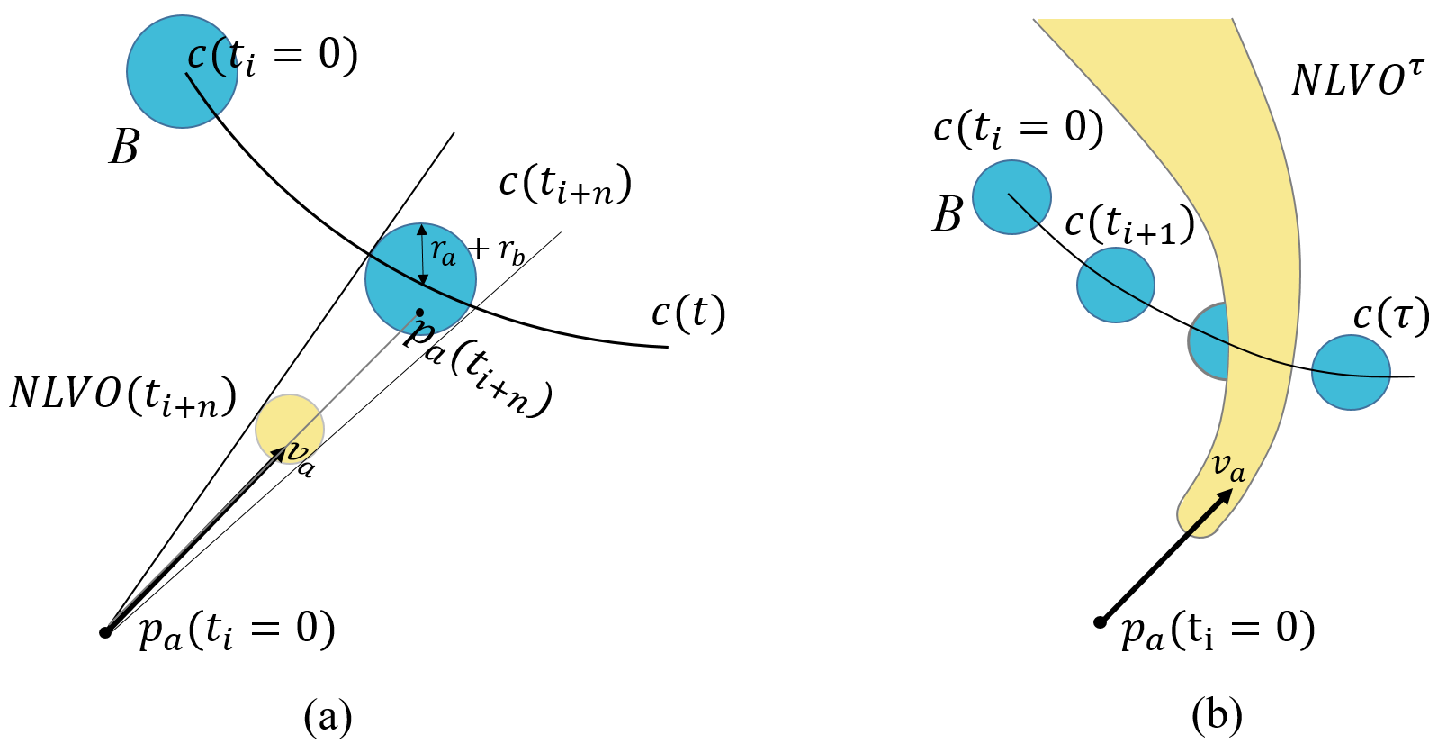
- First, it generalizes the concept of Nonlinear velocity obstacle (NLVO) [27] to develop a new approach to identify the set of control inputs to robot that will lead the robot towards collision, named control obstacle. It seeks to address the issue of navigating a robot with kinodynamic constraints while considering that a passive agent is moving along an arbitrary path, probably non-linear. The original approach of NLVO does not consider the robot model, and thus is limited to the agent with dynamics as of single integrator.
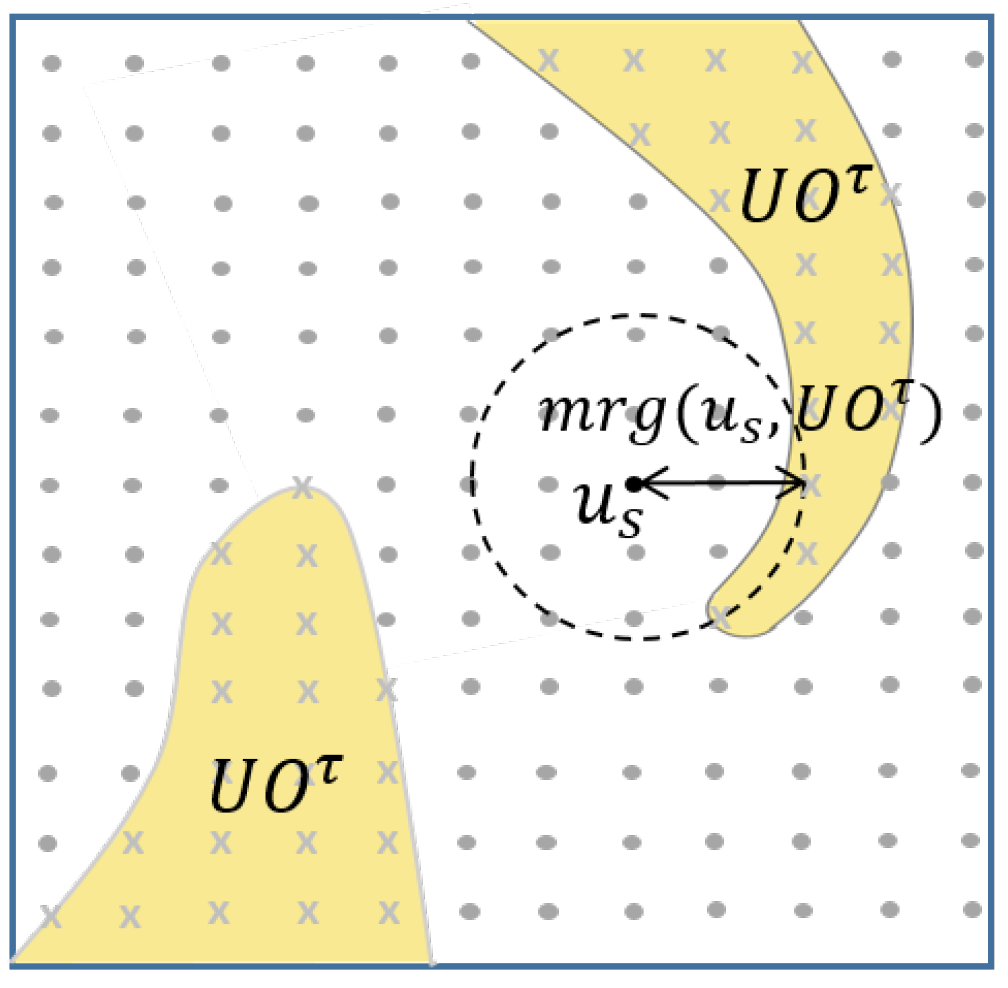
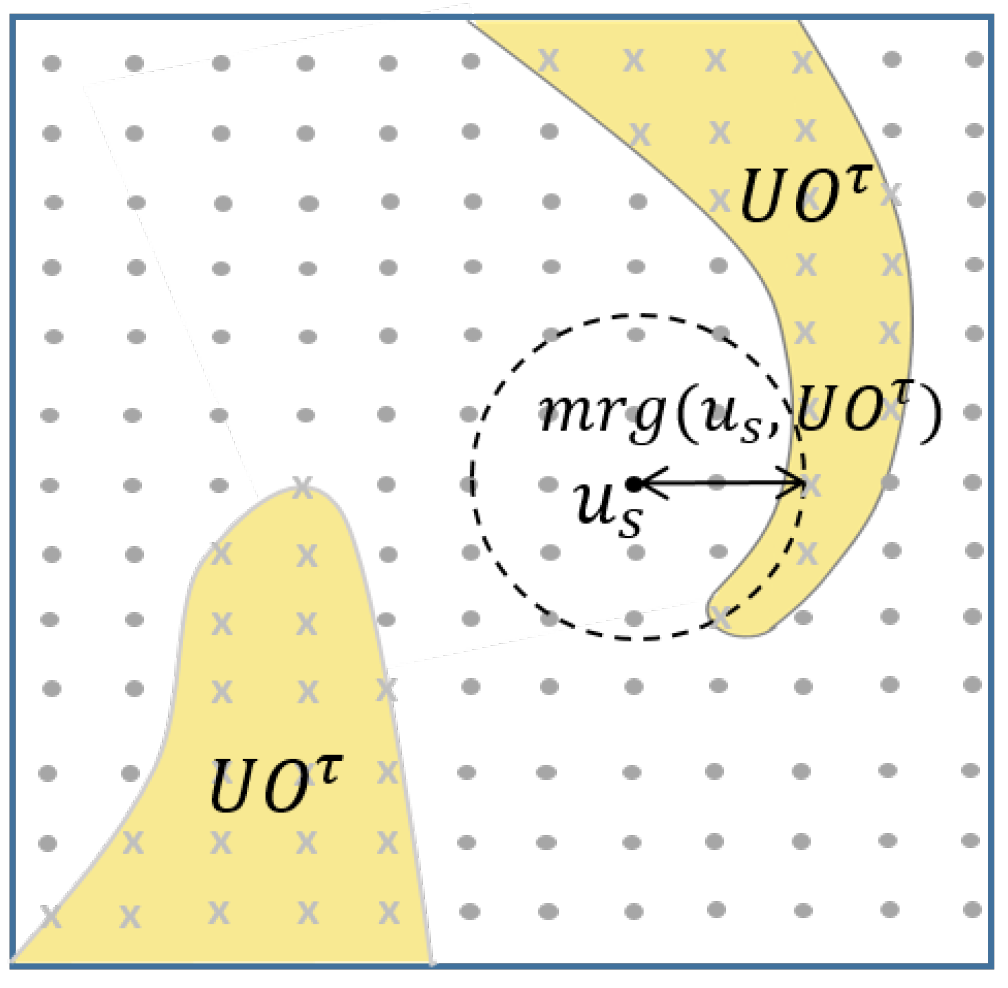
- Secondly, a novel collision avoidance strategy is proposed, that allows the robot to make a safe decision for avoiding a collision with the passive agents. The safe navigation decision is based on the concept of minimum safety margin which is the measure of how safe the path is in the presence of various sources of unmodeled uncertainties.
1.2. Limitations
1.3. Organization
2. Previous Work
3. Background
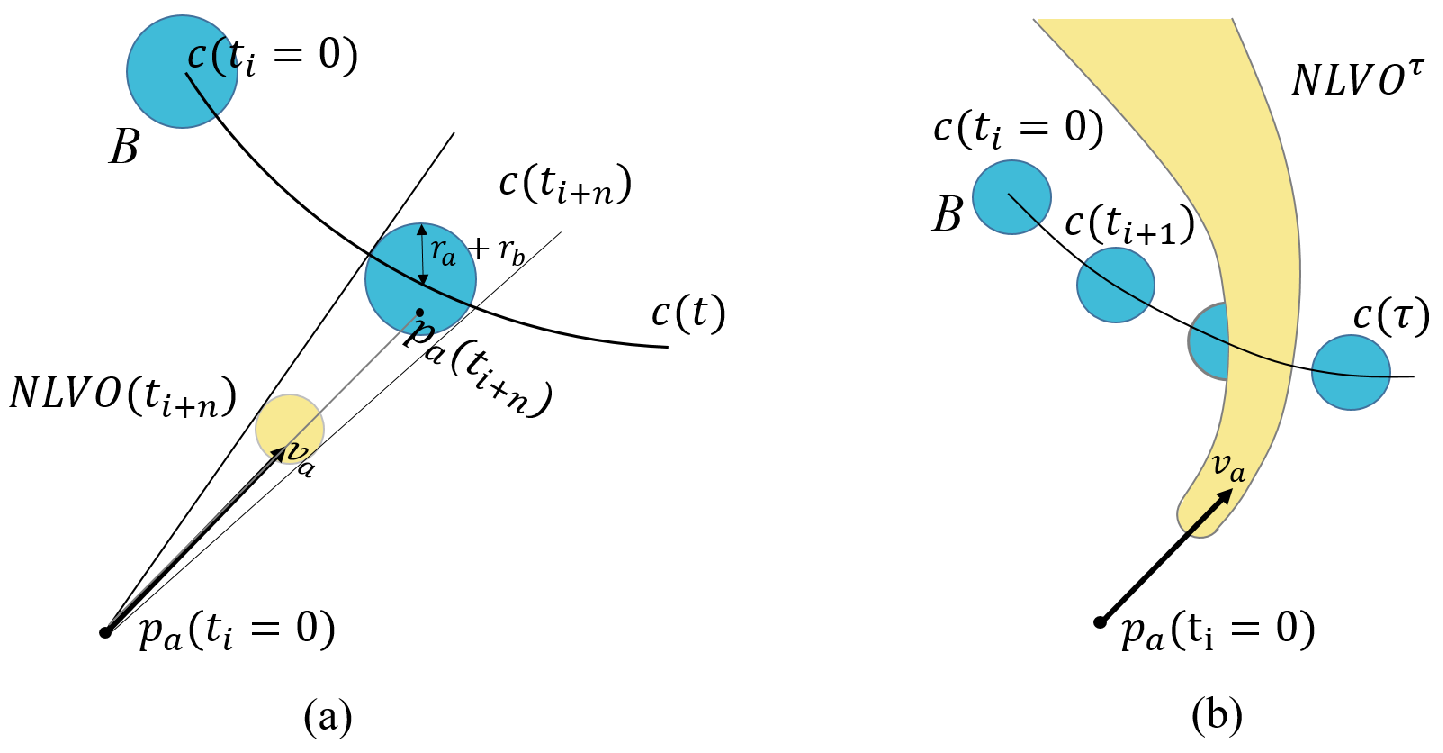
3.1. Nonlinear Velocity Obstacle
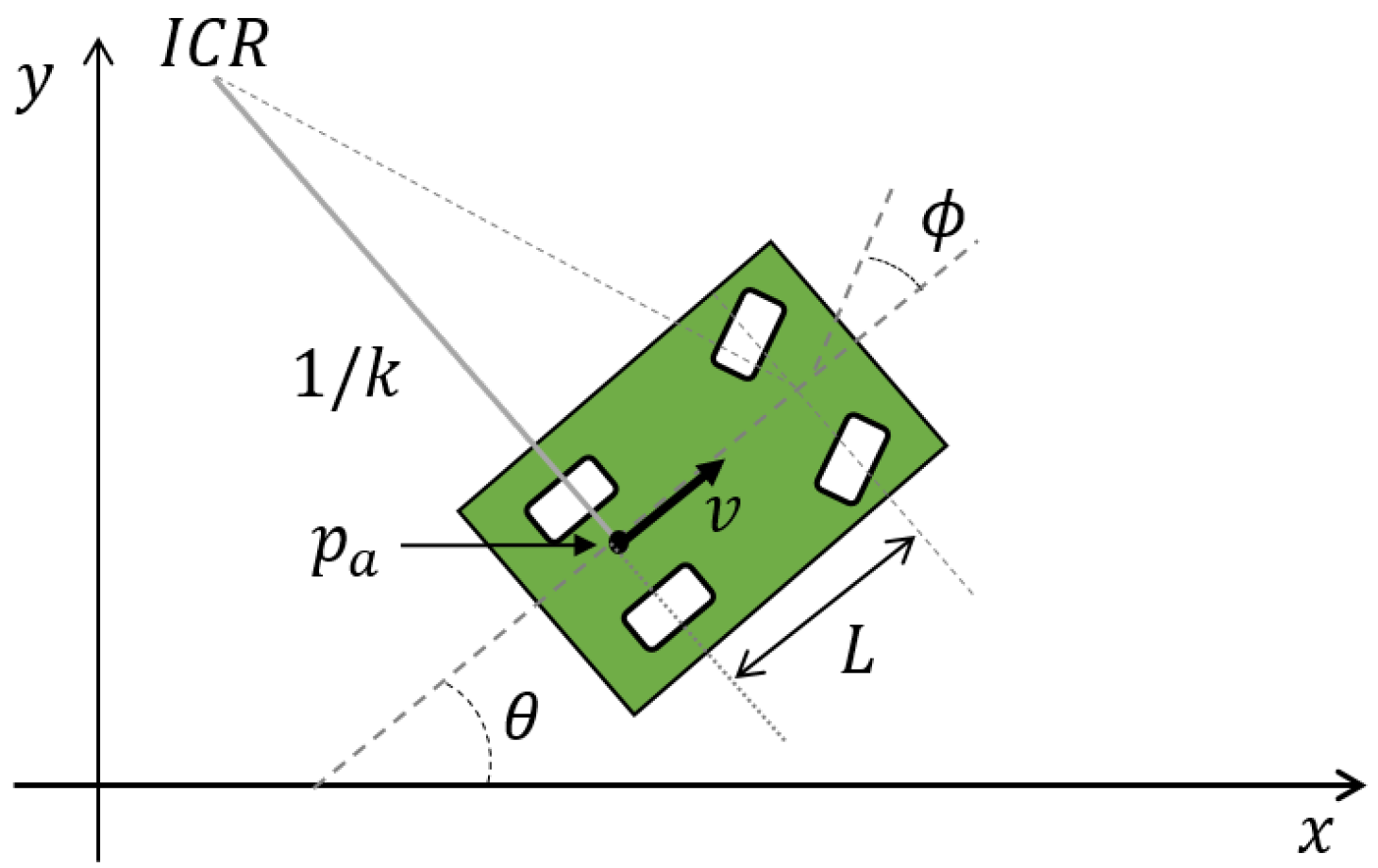
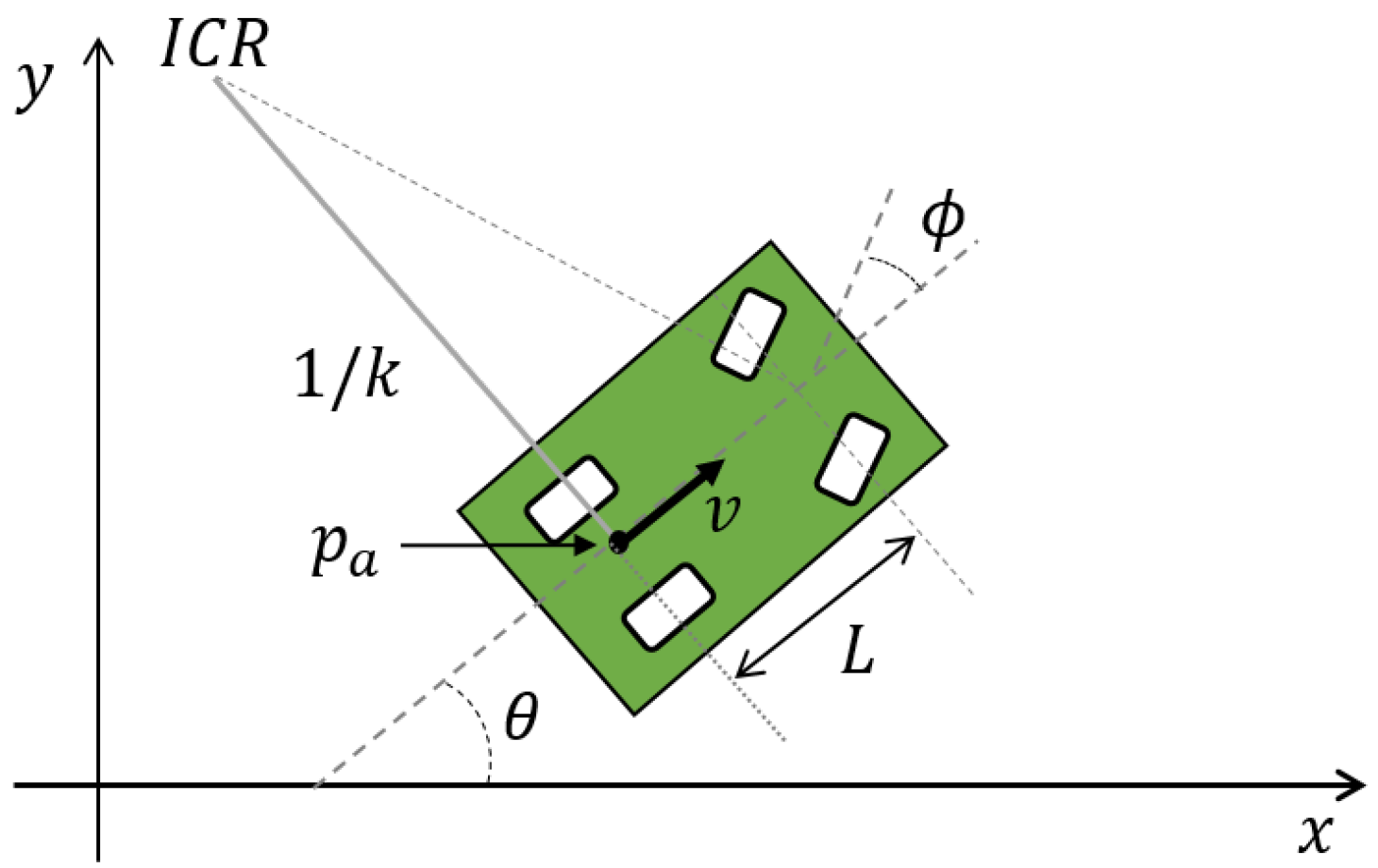
3.2. Robot with Kinodynamic Constraints
4. Safe Margin Control Space
4.1. Passive Agent Representation
4.2. Notations and Assumptions
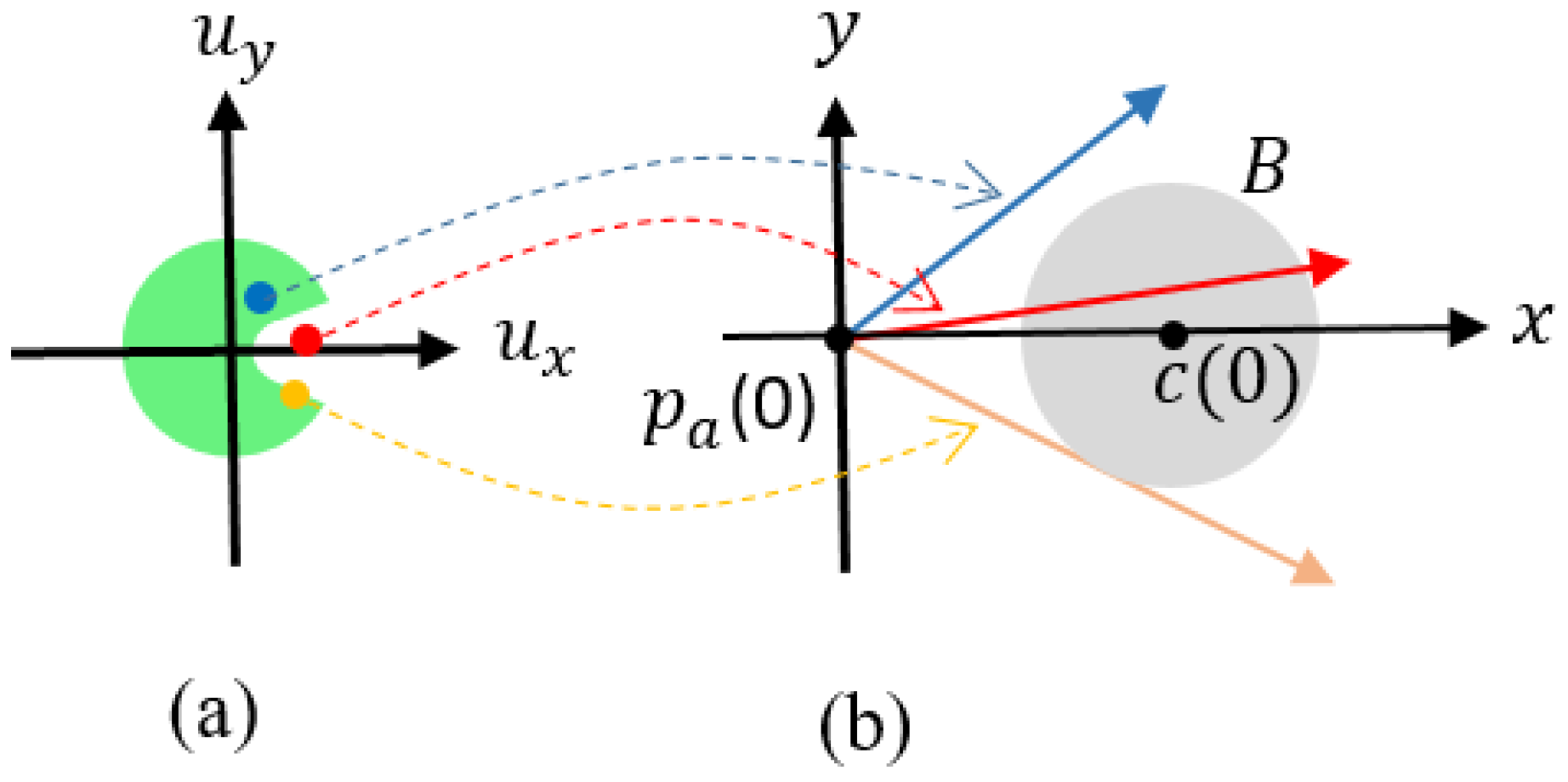
4.3. Control Obstacle
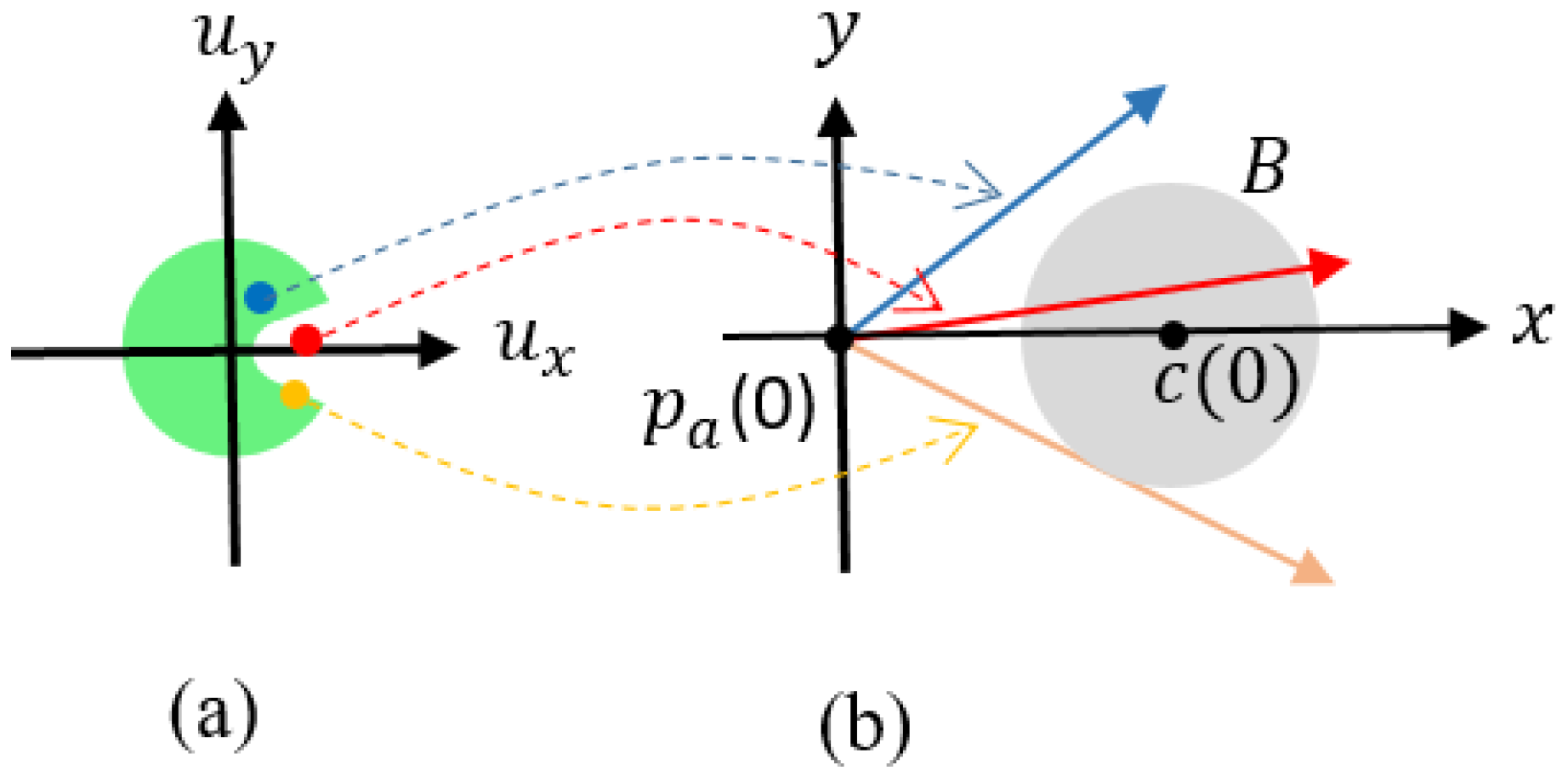
4.4. Safe Control Inputs
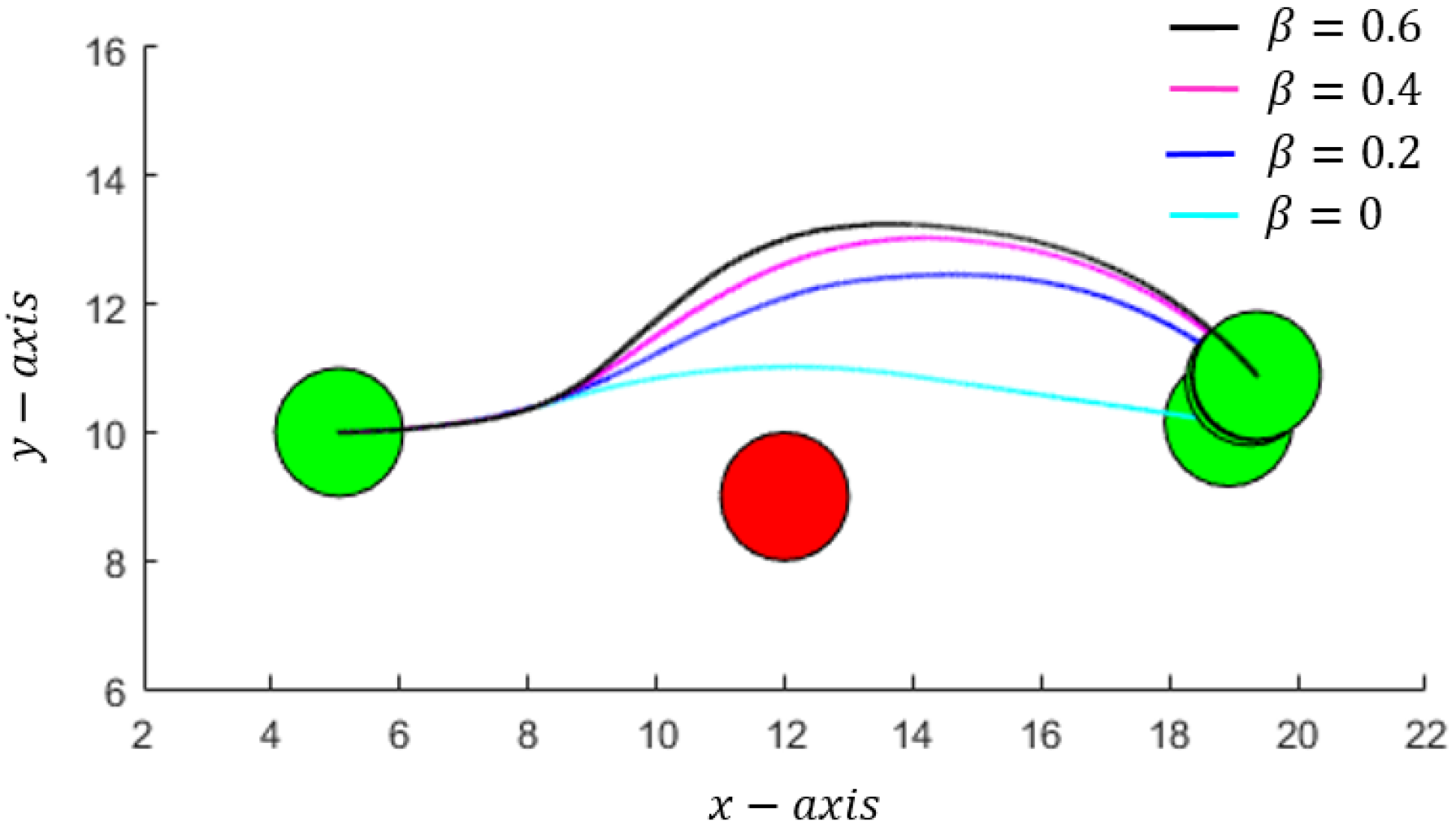
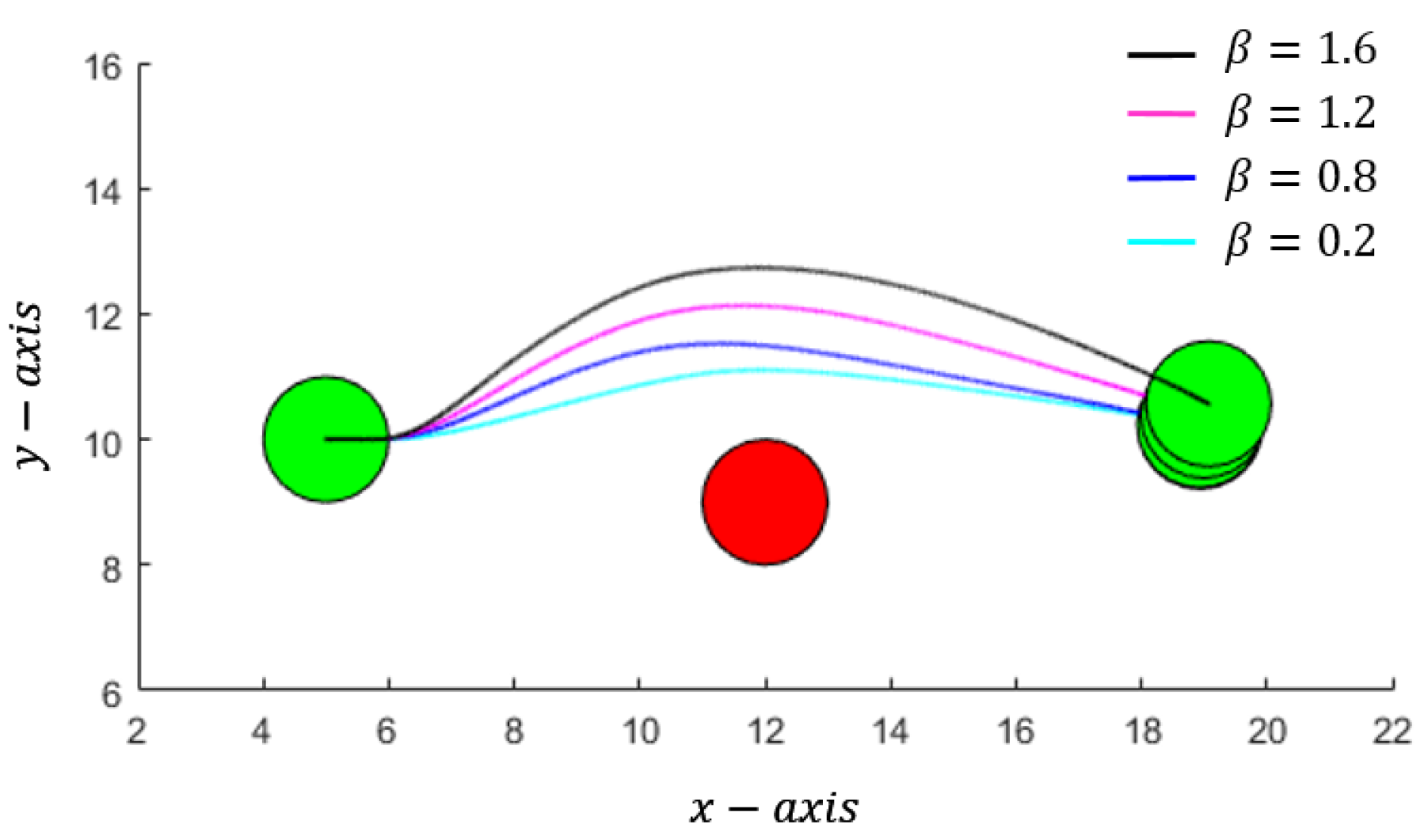
4.5. Example: Robot as Single-Integrator
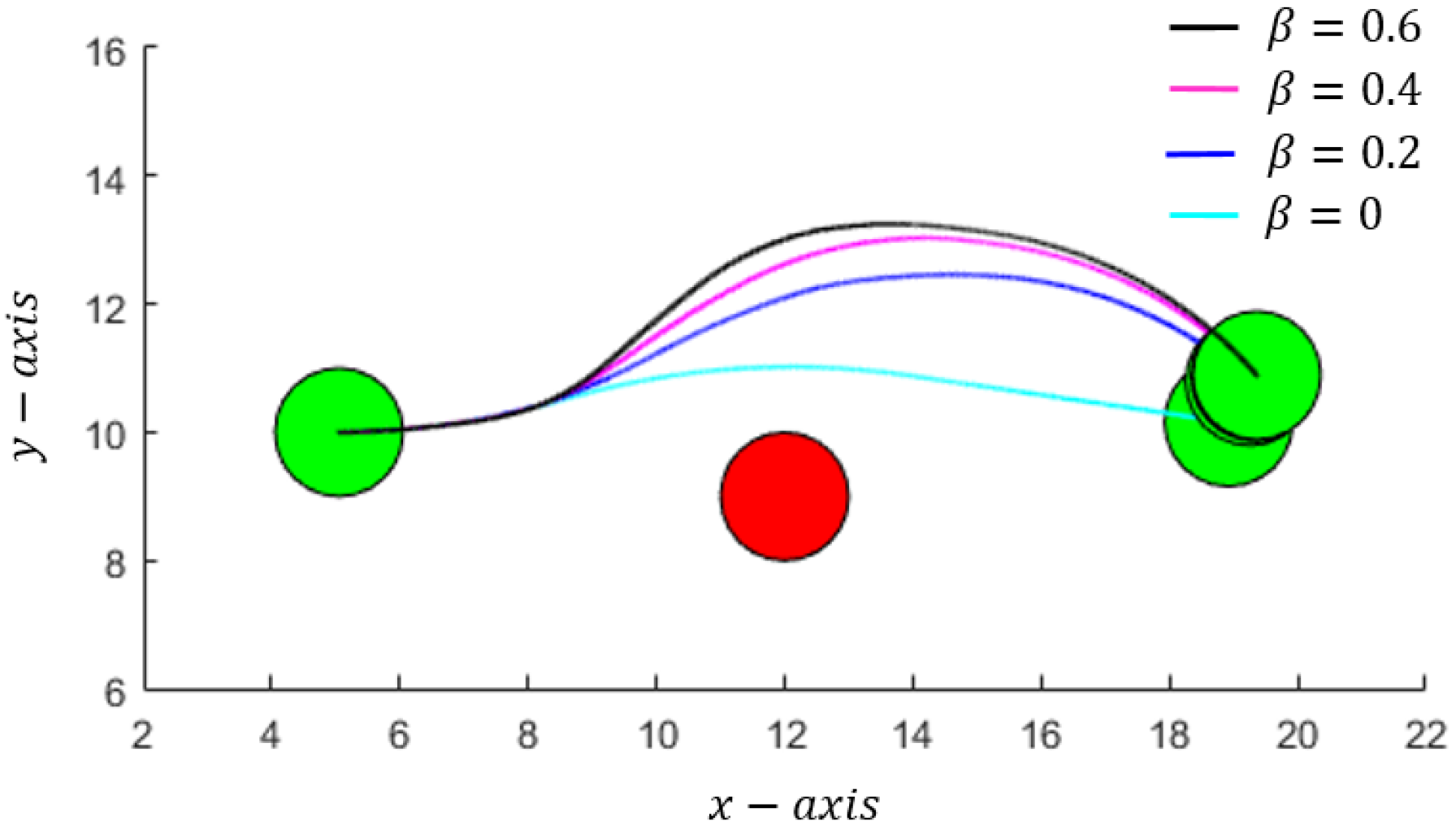
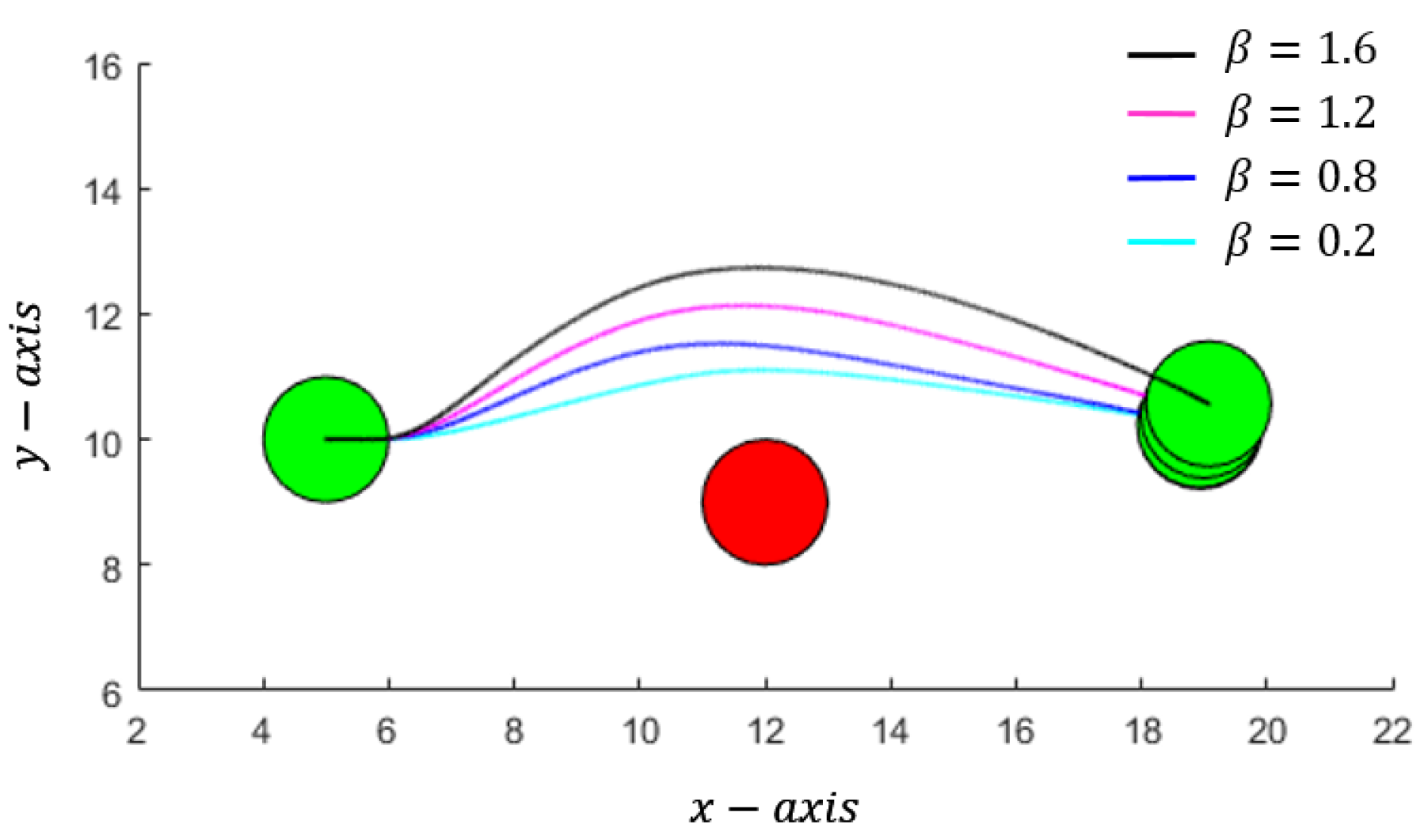
- current position at , radius , and maximum linear speed limit of 1unit/s.
- disc shaped static obstacle of radius centered at .
- temporary control obstacle considered at every time step of 0.1 s up to time horizon of s.
5. Navigational Approach
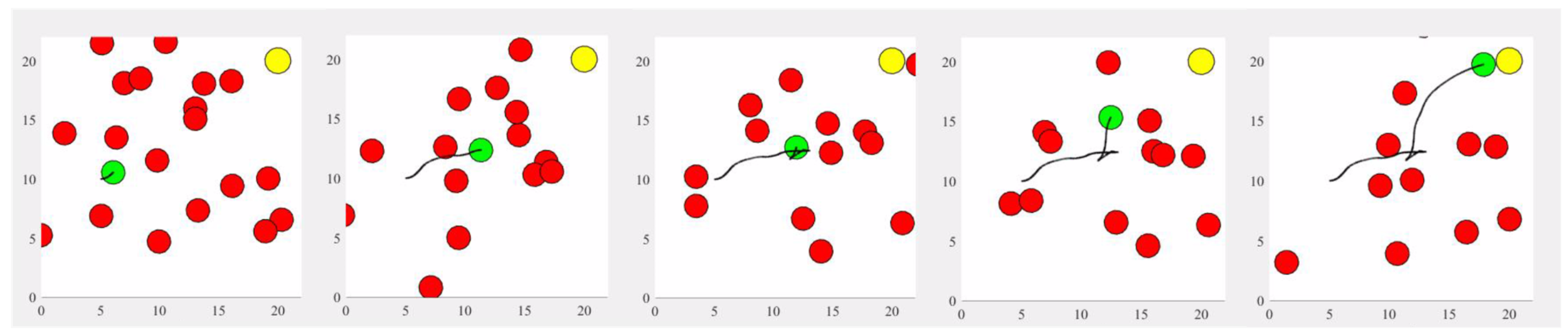
5.1. Avoiding Multiple Passive Agents
| Algorithm 1 Sample Control Space |
|
| Algorithm 2 Find Best Safe Control Input |
|
5.2. Global Navigation
6. Implementation and Results
6.1. Considered Kinodynamic Model of Robot
6.1.1. Car-Like Robot
- if ,
- if ,
6.1.2. Double Integrator
6.2. Implementation Details and Simulation Setup
- Car-like robot: Maximum velocity unit/s, Maximum curvature unit .
- Double integrator: Maximum velocity unit/s, Maximum acceleration unit/.
6.3. Collision Avoidance with Multiple Passive Agents
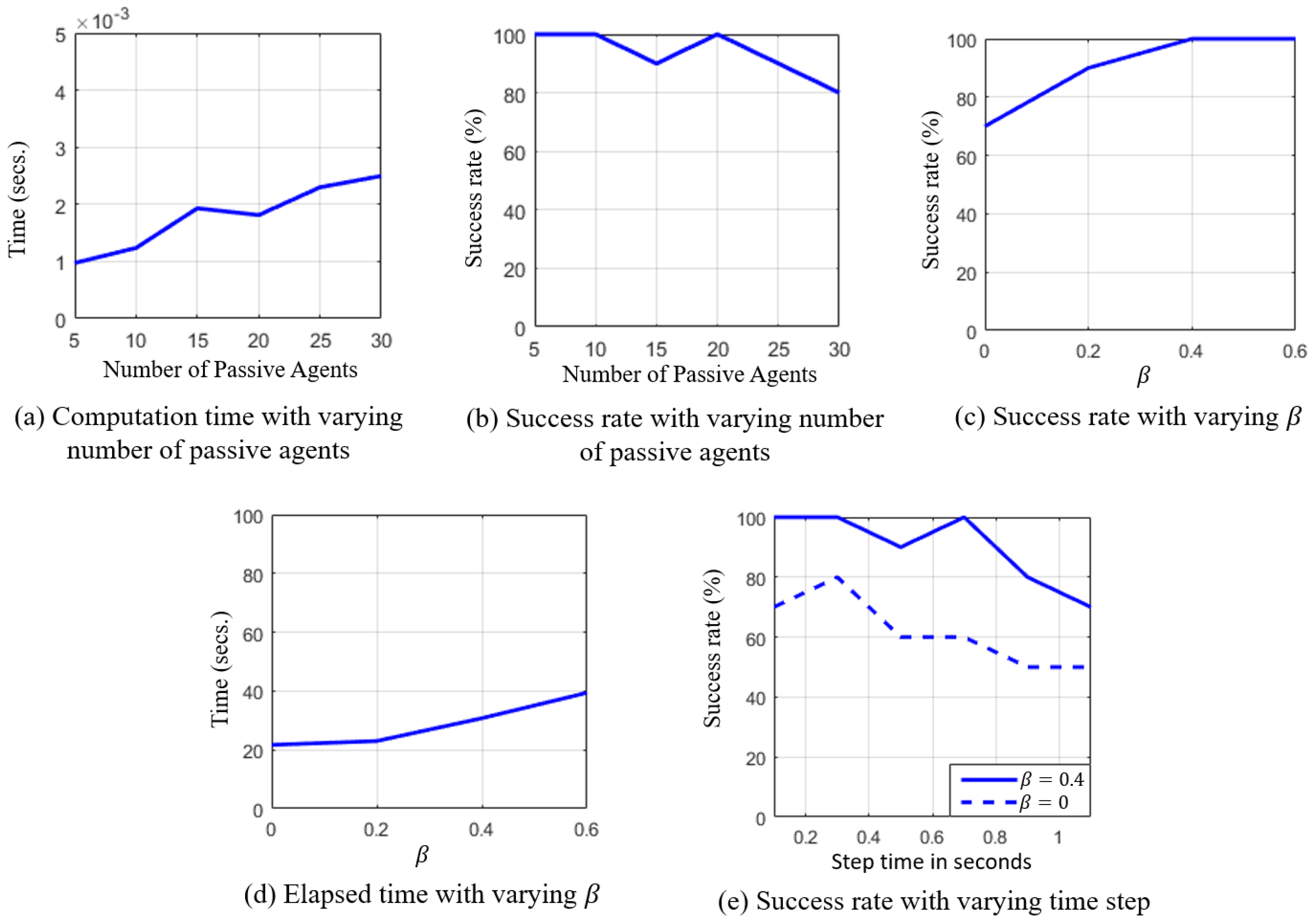
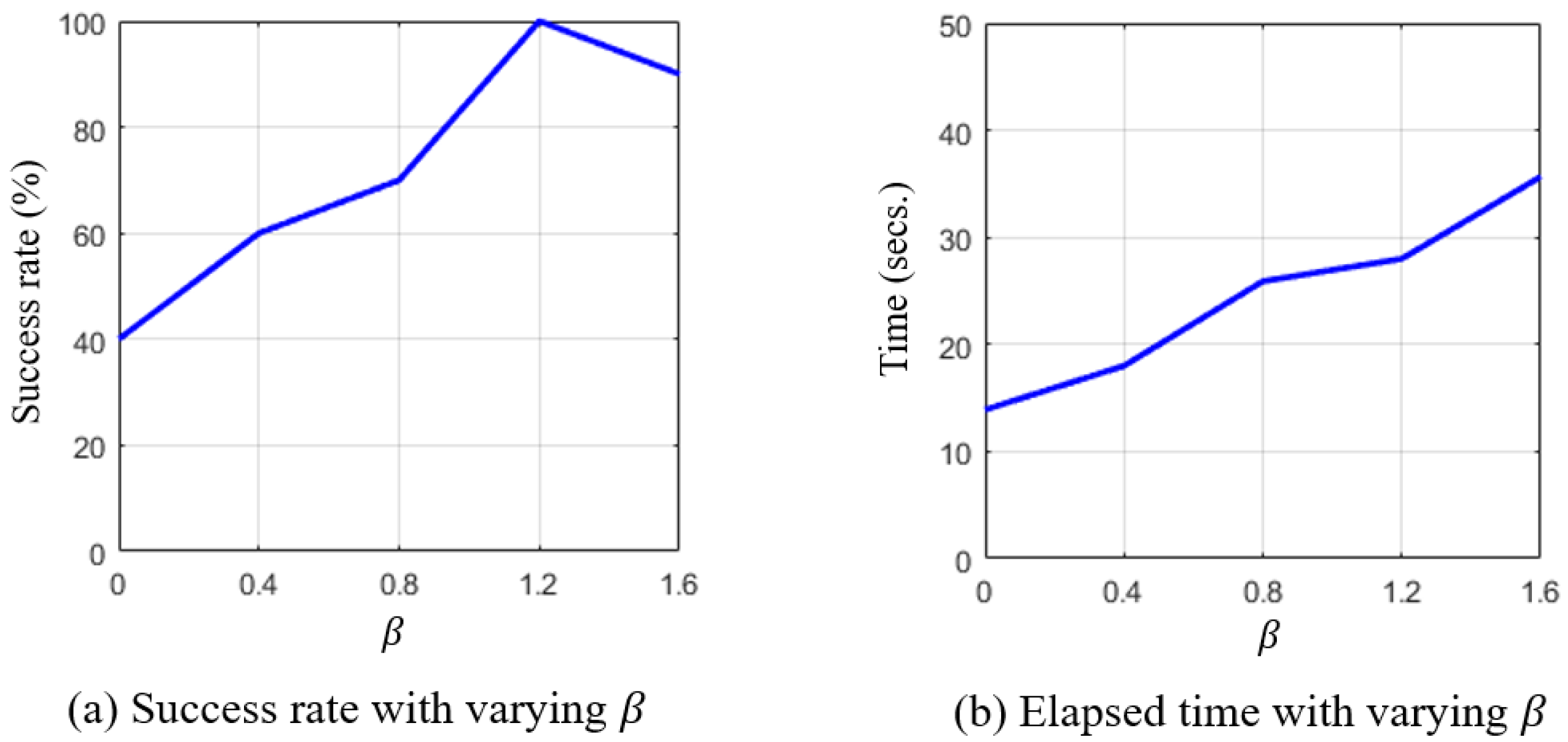
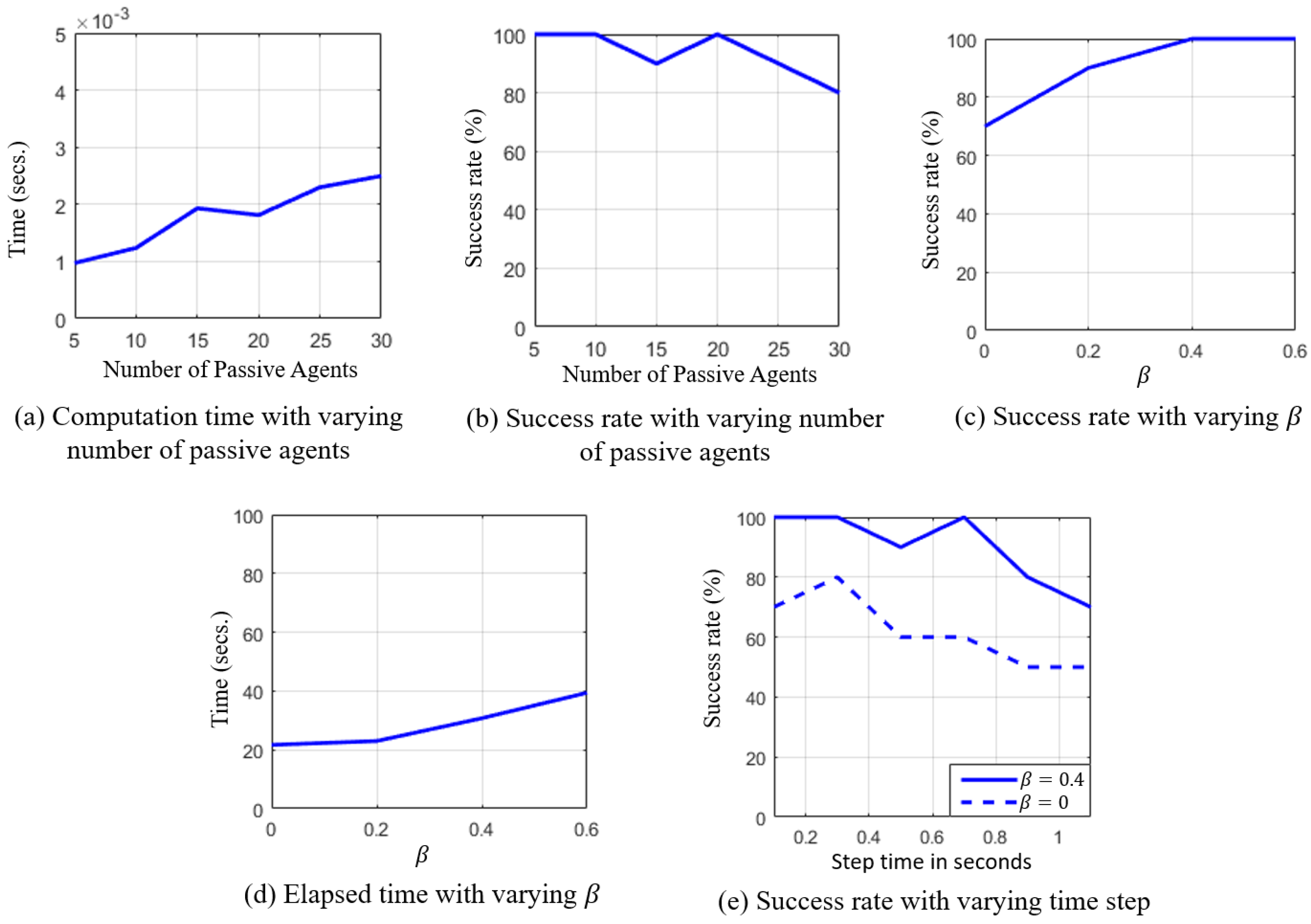
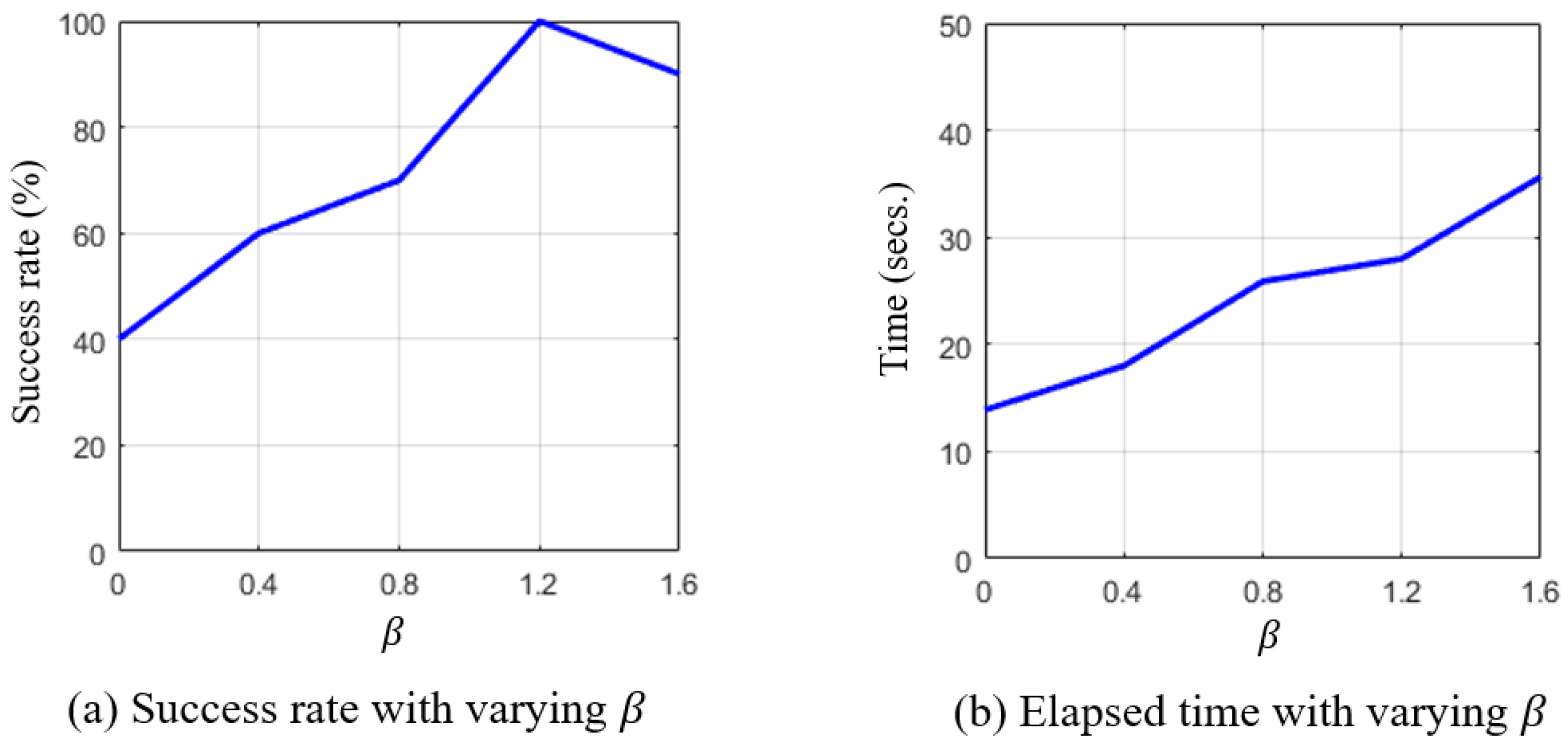
6.3.1. Performance Results
6.3.2. Comparison with GVO
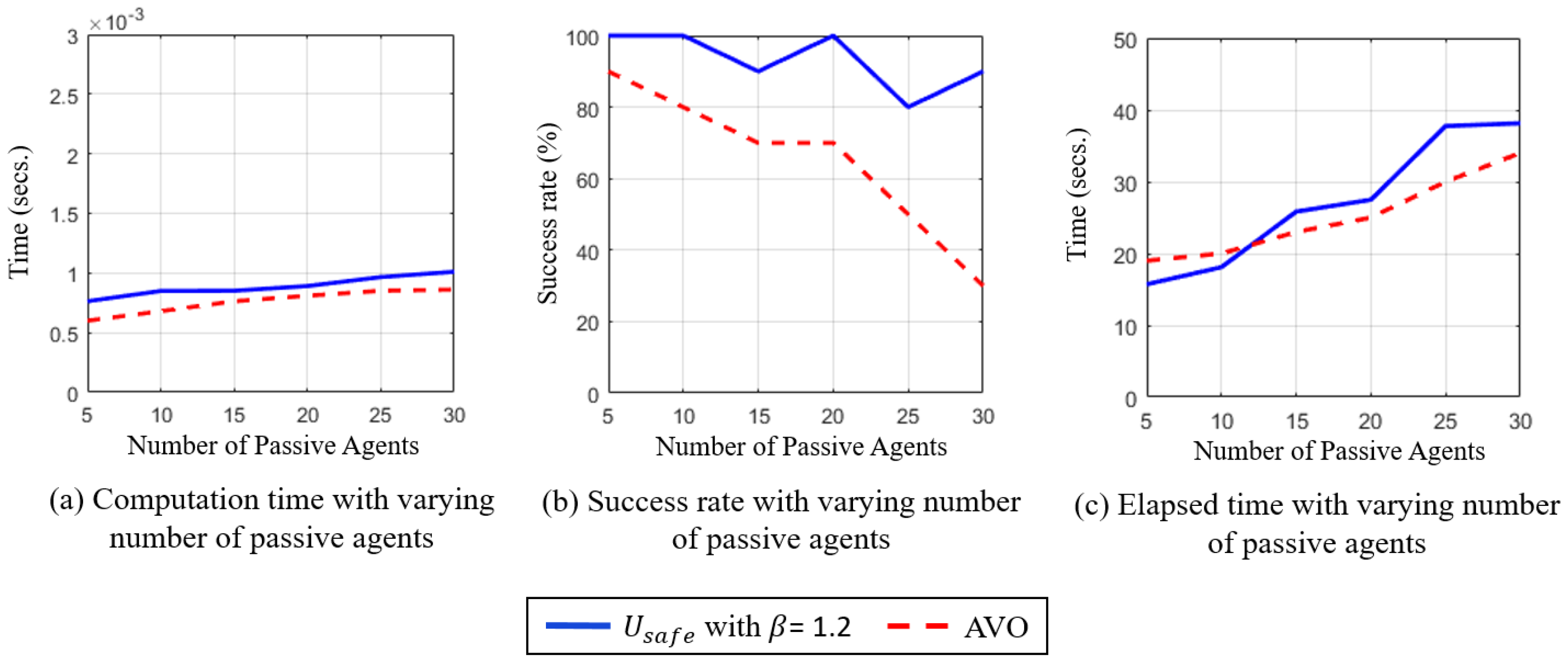
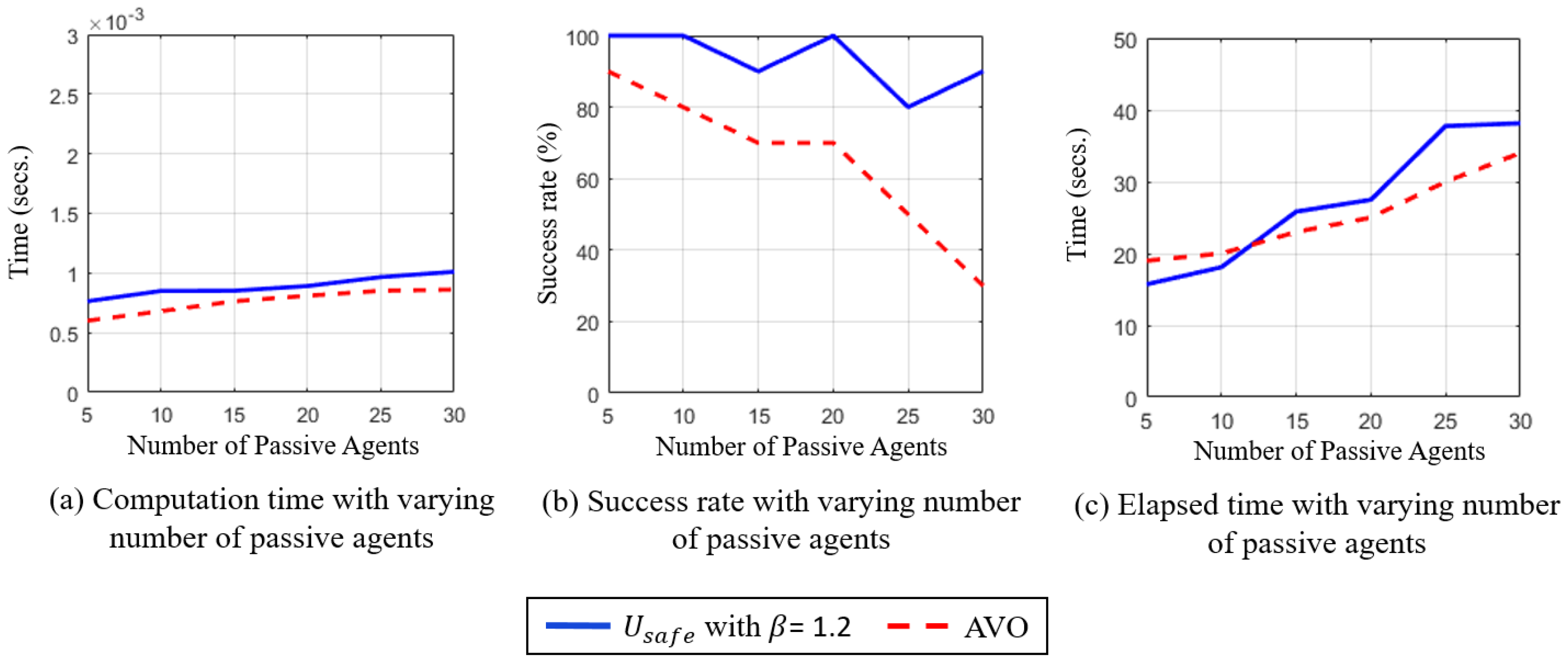
6.3.3. Comparison with AVO
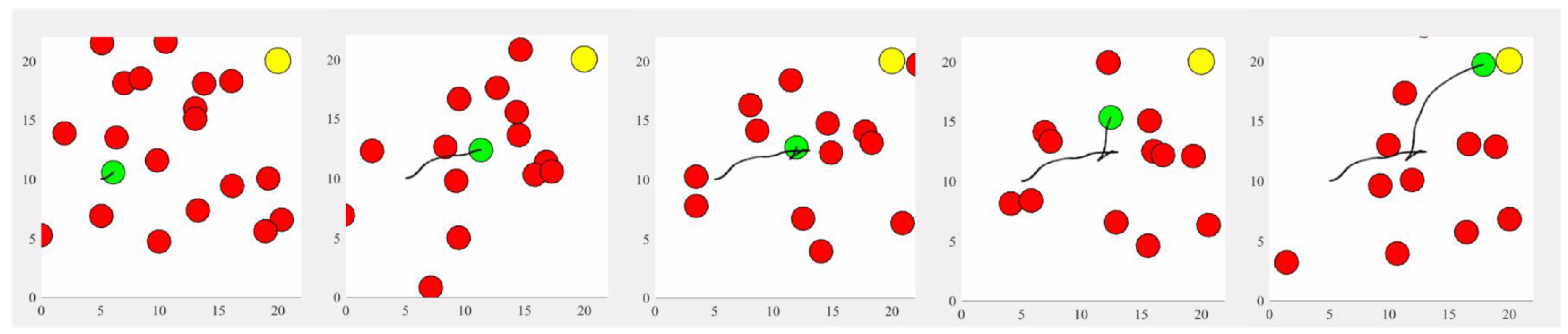
6.4. Global Navigation
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| VO | Velocity Obstacle |
| NLVO | Nonlinear Velocity Obstacle |
| AVO | Accleration Velocity Obstacle |
| GVO | Generalized Velocity Obstacle |
References
- Prassler, E.; Scholz, J.; Fiorini, P. A robotic wheelchair for crowded public environments. IEEE Robot. Autom. Mag. 2001, 8, 38–45. [Google Scholar]
- Breitenmoser, A.; Tâche, F.; Caprari, G.; Siegwart, R.; Moser, R. MagneBike: Toward multi climbing robots for power plant inspection. In Proceedings of the 9th International Conference on Autonomous Agents and Multiagent Systems: Industry track, Toronto, ON, Canada, 10–14 May 2010; International Foundation for Autonomous Agents and Multiagent Systems: Singapore, 2010; pp. 1713–1720. [Google Scholar]
- Laumond, J.P.; Jacobs, P.; Taïx, M.; Murray, R. A Motion Planner for Nonholonomic Mobile Robots. IEEE Trans. Robot. Autom. 1994, 10, 577–593. [Google Scholar]
- Scheuer, A.; Fraichard, T. Continuous-curvature path planning for car-like vehicles. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Grenoble, France, 7–11 September 1997; Volume 2, pp. 997–1003. [Google Scholar]
- Lamiraux, F.; Laumond, J.P. Smooth motion planning for car-like vehicles. IEEE Trans. Robot. Autom. 2001, 17, 498–502. [Google Scholar]
- Frazzoli, E.; Dahleh, M.; Feron, E. Real-time motion planning for agile autonomous vehicles. J. Guid. Control Dyn. 2002, 25, 116–129. [Google Scholar]
- Hsu, D.; Kindel, R.; Latombe, J.C.; Rock, S. Randomized kinodynamic motion planning with moving obstacles. Int. J. Robot. Res. 2002, 21, 233–255. [Google Scholar]
- Zucker, M.; Kuffner, J.; Branicky, M. Multipartite RRTs for rapid replanning in dynamic environments. In Proceedings of the IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 1603–1609. [Google Scholar]
- Kant, K.; Zucker, S. Toward Efficient Trajectory Planning: The Path-Velocity Decomposition. Int. J. Robot. Res. 1986, 5, 72–89. [Google Scholar] [CrossRef]
- Peng, J.; Akella, S. Coordinating multiple Robots with kinodynamic constraints along specified paths. Int. J. Robot. Res. 2005, 24, 295–310. [Google Scholar] [CrossRef]
- Van Den Berg, J.; Overmars, M. Kinodynamic motion planning on roadmaps in dynamic environments. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 Octomber–2 November 2007; pp. 4253–4258. [Google Scholar]
- Gaillard, F.; Soulignac, M.; Dinont, C.; Mathieu, P. Deterministic kinodynamic planning with hardware demonstrations. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, 25–30 September 2011; pp. 3519–3525. [Google Scholar]
- Chen, C.; Rickert, M.; Knoll, A. Kinodynamic motion planning with space-time exploration guided heuristic search for car-like robots in dynamic environments. In Proceedings of the IEEE/RSJ International Conference Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 Octomber 2015; pp. 2666–2671. [Google Scholar]
- Bennewitz, M.; Burgard, W.; Thrun, S. Learning motion patterns of persons for mobile service robots. In Proceedings of the IEEE International Conference on Robotics and Automation, Washington, DC, USA, 11–15 May 2002; Volume 4, pp. 3601–3606. [Google Scholar]
- Vasquez, D.; Fraichard, T. Motion prediction for moving objects: A statistical approach. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; Volume 4, pp. 3931–3936. [Google Scholar]
- Kim, S.; Guy, S.; Liu, W.; Wilkie, D.; Lau, R.; Lin, M.; Manocha, D. BRVO: Predicting pedestrian trajectories using velocity-space reasoning. Int. J. Robot. Res. 2015, 34, 201–217. [Google Scholar] [CrossRef]
- Bera, A.; Kim, S.; Randhavane, T.; Pratapa, S.; Manocha, D. GLMP-realtime pedestrian path prediction using global and local movement patterns. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 5528–5535. [Google Scholar]
- Fiorini, P.; Shiller, Z. Motion planning in dynamic environments using velocity obstacles. Int. J. Robot. Res. 1998, 17, 760–772. [Google Scholar] [CrossRef]
- Van Den Berg, J.; Guy, S.J.; Lin, M.; Manocha, D. Reciprocal n-body collision avoidance. In Robotics Research; Pradalier, C., Siegwart, R., Hirzinger, G., Eds.; Springer: Berlin, Germany, 2011; pp. 3–19. [Google Scholar]
- Best, A.; Narang, S.; Manocha, D. Real-time reciprocal collision avoidance with elliptical agents. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 298–305. [Google Scholar]
- Alonso-Mora, J.; Breitenmoser, A.; Rufli, M.; Beardsley, P.; Siegwart, R. Optimal reciprocal collision avoidance for multiple non-holonomic robots. In Distributed Autonomous Robotic Systems; Springer: Berlin, Germany, 2013; pp. 203–216. [Google Scholar]
- Alonso-Mora, J.; Breitenmoser, A.; Beardsley, P.; Siegwart, R. Reciprocal collision avoidance for multiple car-like robots. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Saint Paul, MN, USA, 14–18 May 2012; pp. 360–366. [Google Scholar]
- Van Den Berg, J.; Snape, J.; Guy, S.J.; Manocha, D. Reciprocal collision avoidance with acceleration-velocity obstacles. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 3475–3482. [Google Scholar]
- Rufli, M.; Alonso-Mora, J.; Siegwart, R. Reciprocal collision avoidance with motion continuity constraints. IEEE Trans. Robot. 2013, 29, 899–912. [Google Scholar] [CrossRef]
- Bareiss, D.; Van Den Berg, J. Generalized reciprocal collision avoidance. Int. J. Robot. Res. 2015, 34, 1501–1514. [Google Scholar] [CrossRef]
- Wilkie, D.; Van Den Berg, J.; Manocha, D. Generalized velocity obstacles. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), St. Louis, MO, USA, 10–15 October 2009; pp. 5573–5578. [Google Scholar]
- Shiller, Z.; Large, F.; Sekhavat, S. Motion planning in dynamic environments: Obstacles moving along arbitrary trajectories. In Proceedings of the IEEE International Conference on Robotics and Automation, Seoul, Korea, 21–26 May 2001; Volume 4, pp. 3716–3721. [Google Scholar]
- Park, J.; Iagnemma, K. Sampling-based planning for maximum margin input space obstacle avoidance. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 Octomber 2015; pp. 2064–2071. [Google Scholar]


© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zuhaib, K.M.; Khan, A.M.; Iqbal, J.; Ali, M.A.; Usman, M.; Ali, A.; Yaqub, S.; Lee, J.Y.; Han, C. Collision Avoidance from Multiple Passive Agents with Partially Predictable Behavior. Appl. Sci. 2017, 7, 903. https://doi.org/10.3390/app7090903
Zuhaib KM, Khan AM, Iqbal J, Ali MA, Usman M, Ali A, Yaqub S, Lee JY, Han C. Collision Avoidance from Multiple Passive Agents with Partially Predictable Behavior. Applied Sciences. 2017; 7(9):903. https://doi.org/10.3390/app7090903
Chicago/Turabian StyleZuhaib, Khalil Muhammad, Abdul Manan Khan, Junaid Iqbal, Mian Ashfaq Ali, Muhammad Usman, Ahmad Ali, Sheraz Yaqub, Ji Yeong Lee, and Changsoo Han. 2017. "Collision Avoidance from Multiple Passive Agents with Partially Predictable Behavior" Applied Sciences 7, no. 9: 903. https://doi.org/10.3390/app7090903