A Novel Hybrid Approach to Deal with DVL Malfunctions for Underwater Integrated Navigation Systems


Abstract
:1. Introduction
- (1)
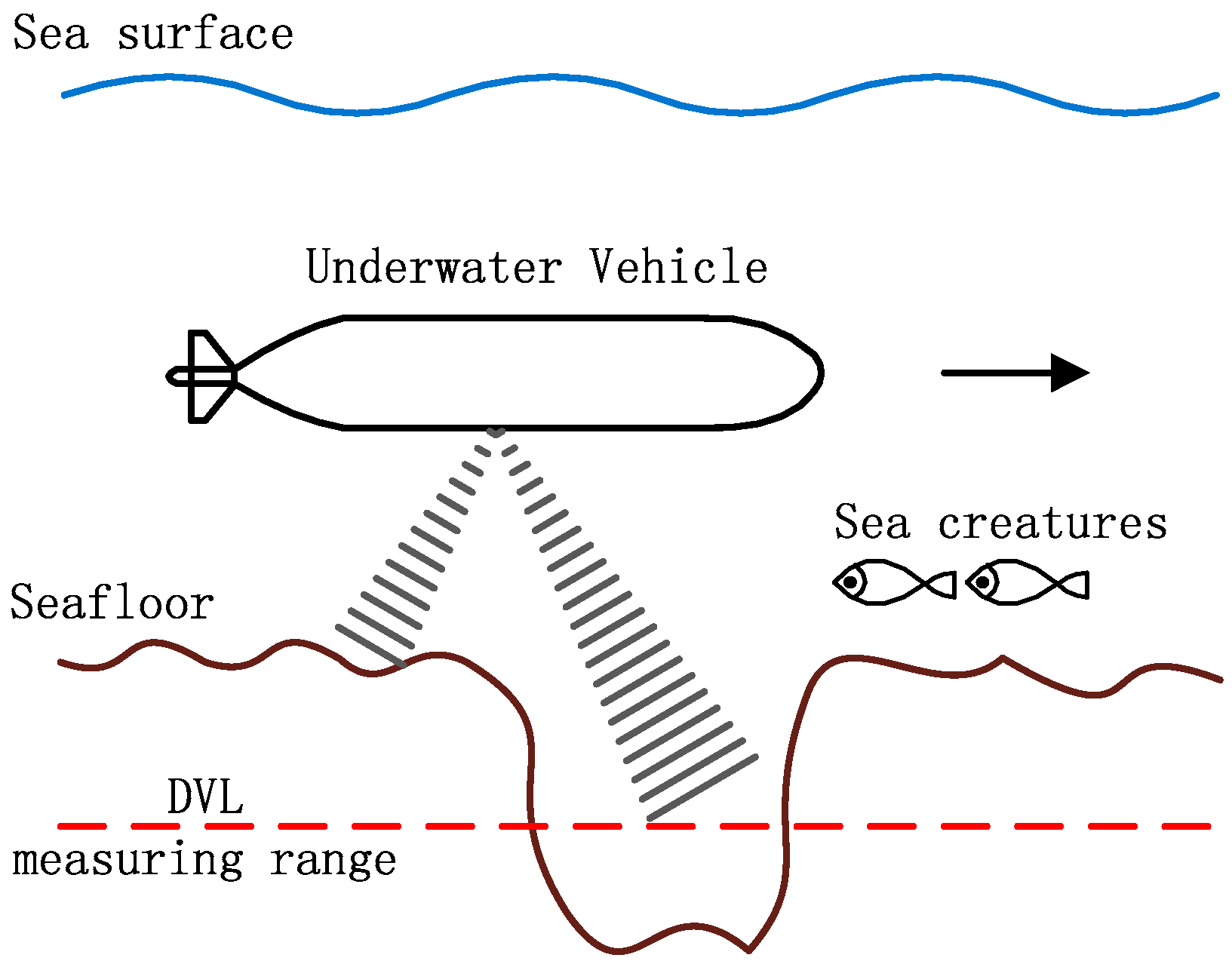
- When the underwater vehicle sails across sea creatures, the acoustic wave emitted by the DVL cannot reach the seafloor.
- (2)
- When the strong wave-absorbing material (such as sludge) exists in the seafloor, the acoustic wave emitted by the DVL cannot be reflected back.
- (3)
- When the underwater vehicle sails over a trench, the distance between the vehicle and the bottom of the trench exceeds the measuring range of the DVL.
- (4)
- When the underwater vehicle performs large angle maneuvers, the DVL could malfunction under the condition of large roll and pitch.
2. Underwater Integrated Navigation System
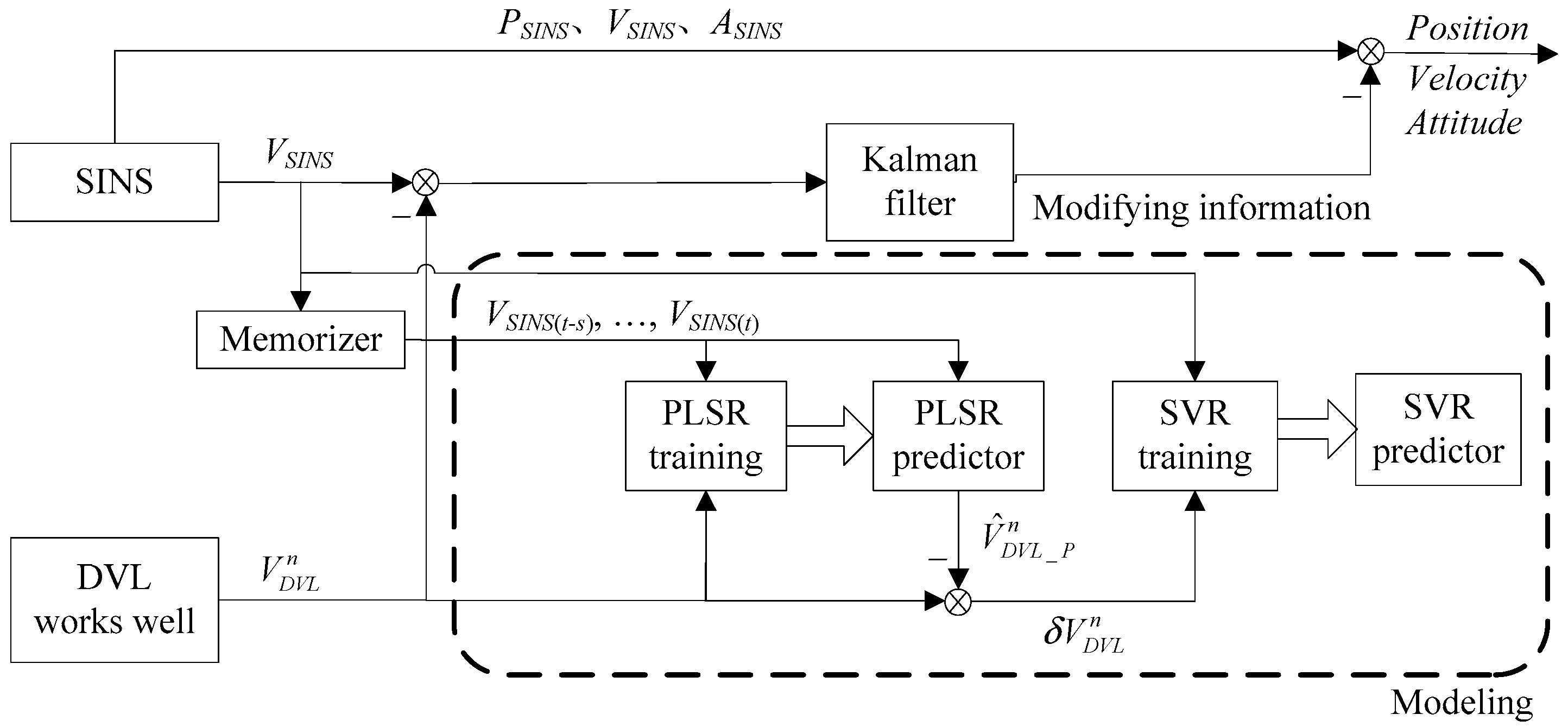
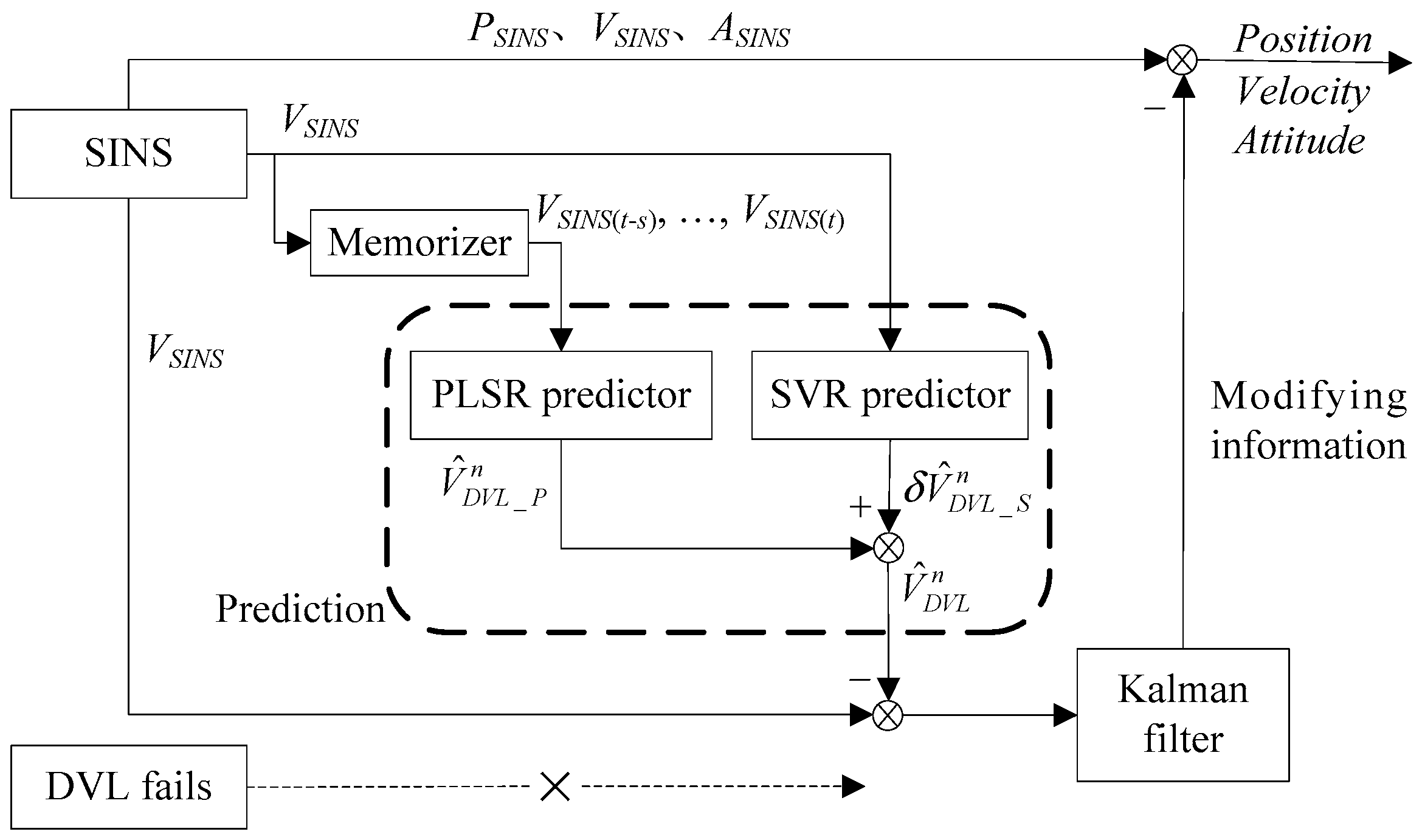
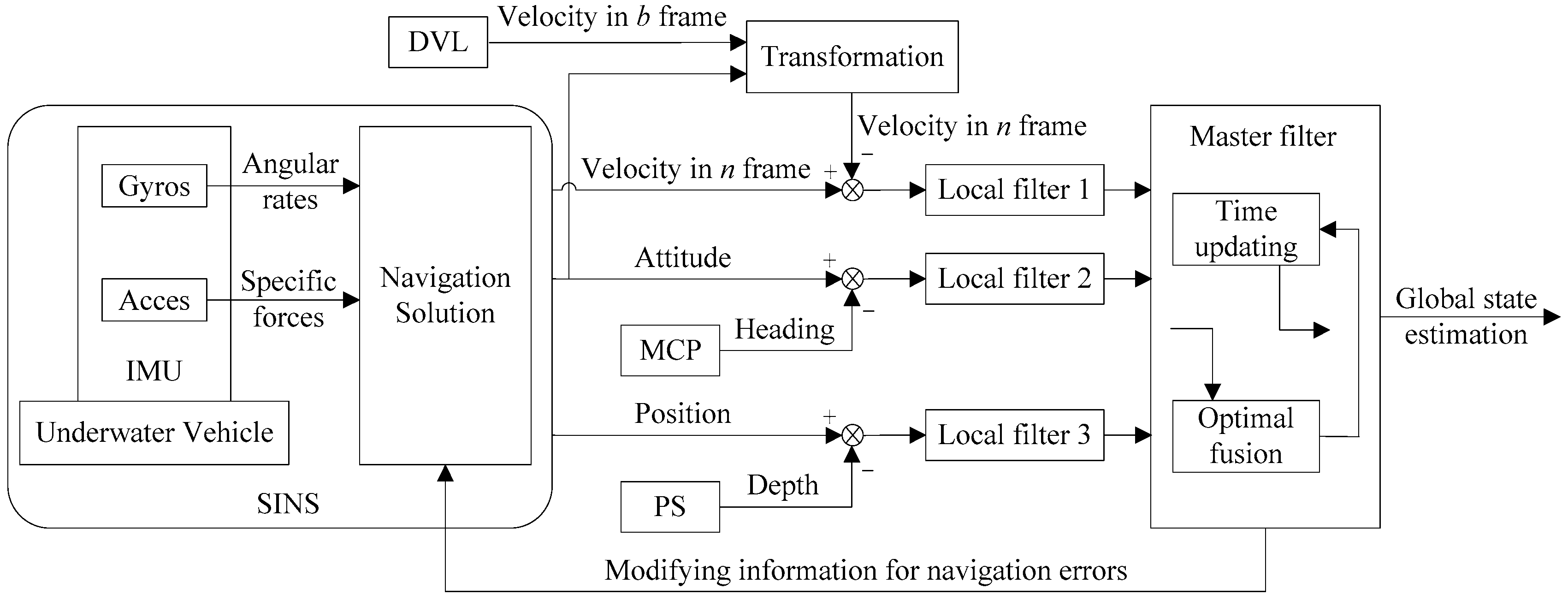
2.1. System Structure
2.2. System Model
3. Proposed PLSR-SVR Hybrid Predictor
3.1. PLSR for the Prediction of the DVL Measurements
- (1)
- t1 and u1 should carry as much the diversity information of the corresponding data matrix as possible.
- (2)
- The degree of correlation between t1 and u1 should reach its maximum.
3.2. SVR for the Prediction of the Residual Components
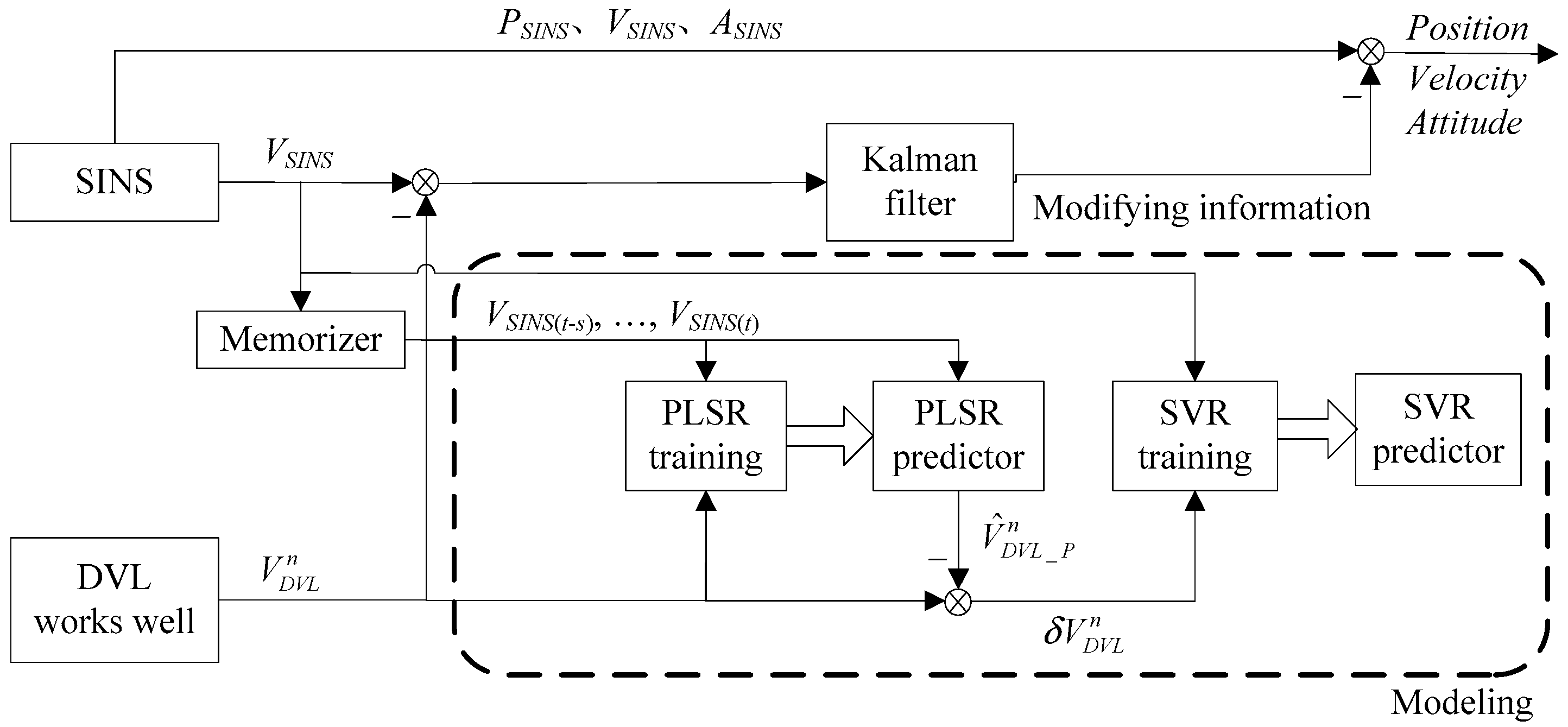
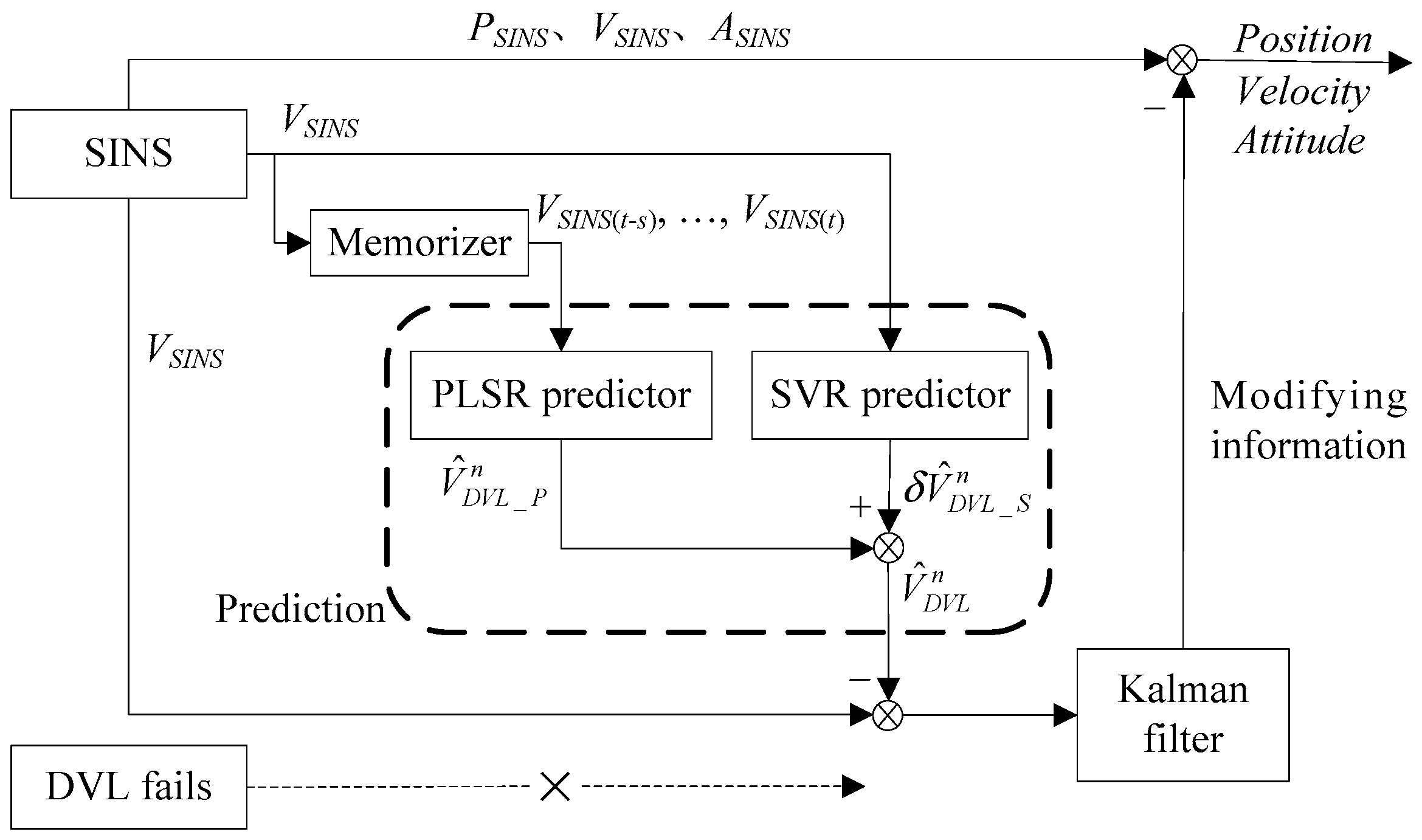
3.3. PLSR-SVR Hybrid Predictor
4. Performance Evaluation
4.1. Simulations and Results
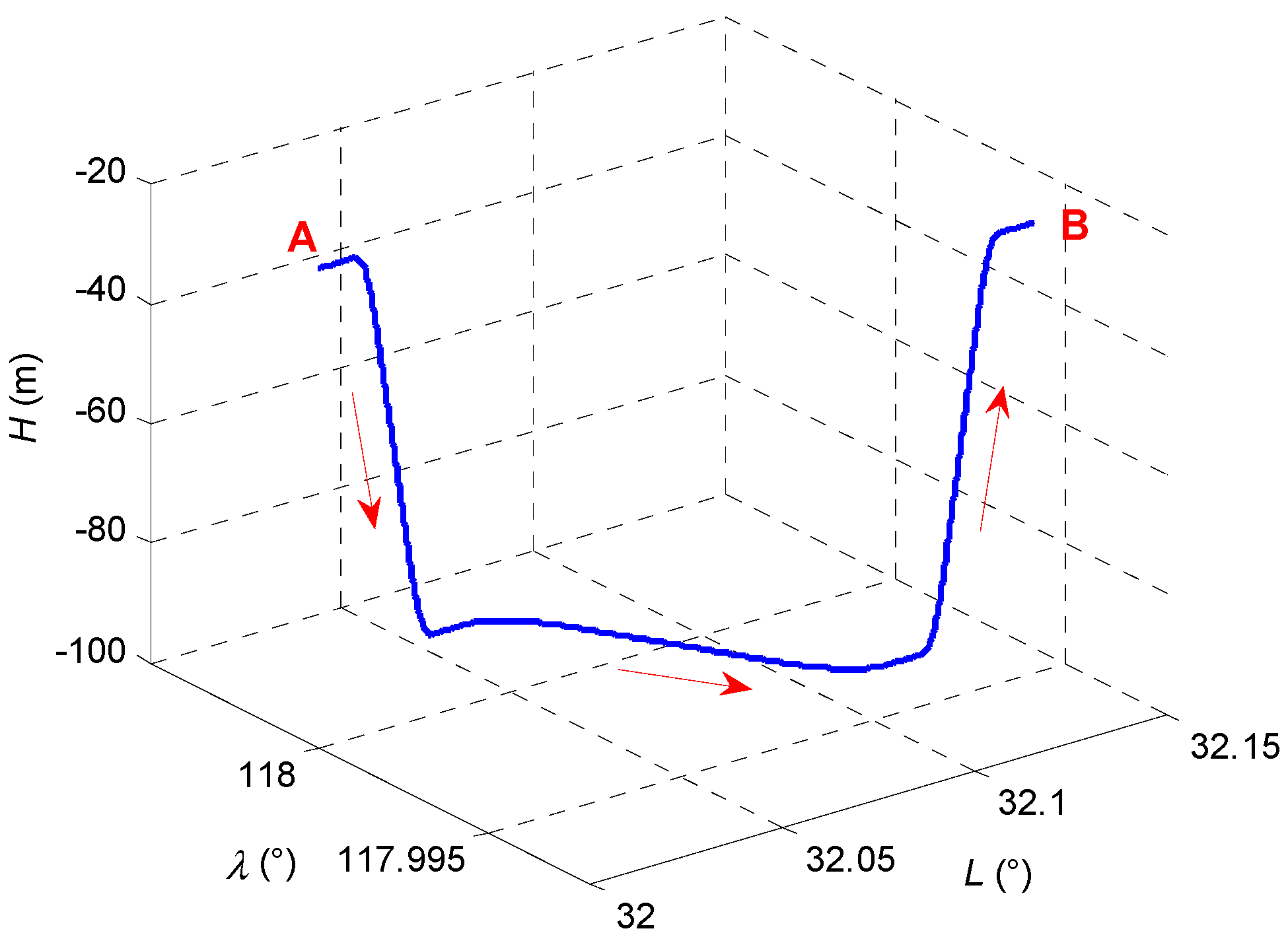
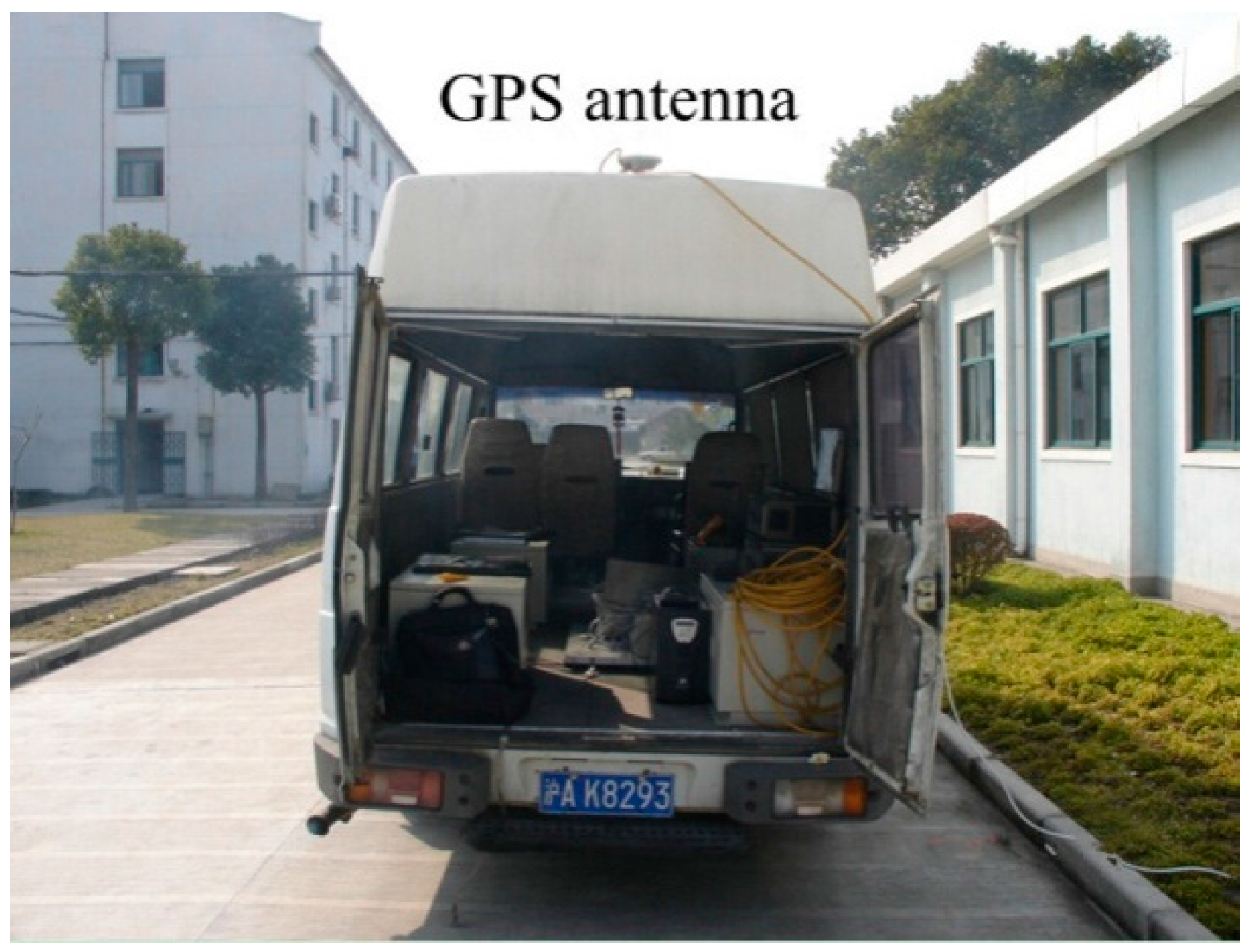
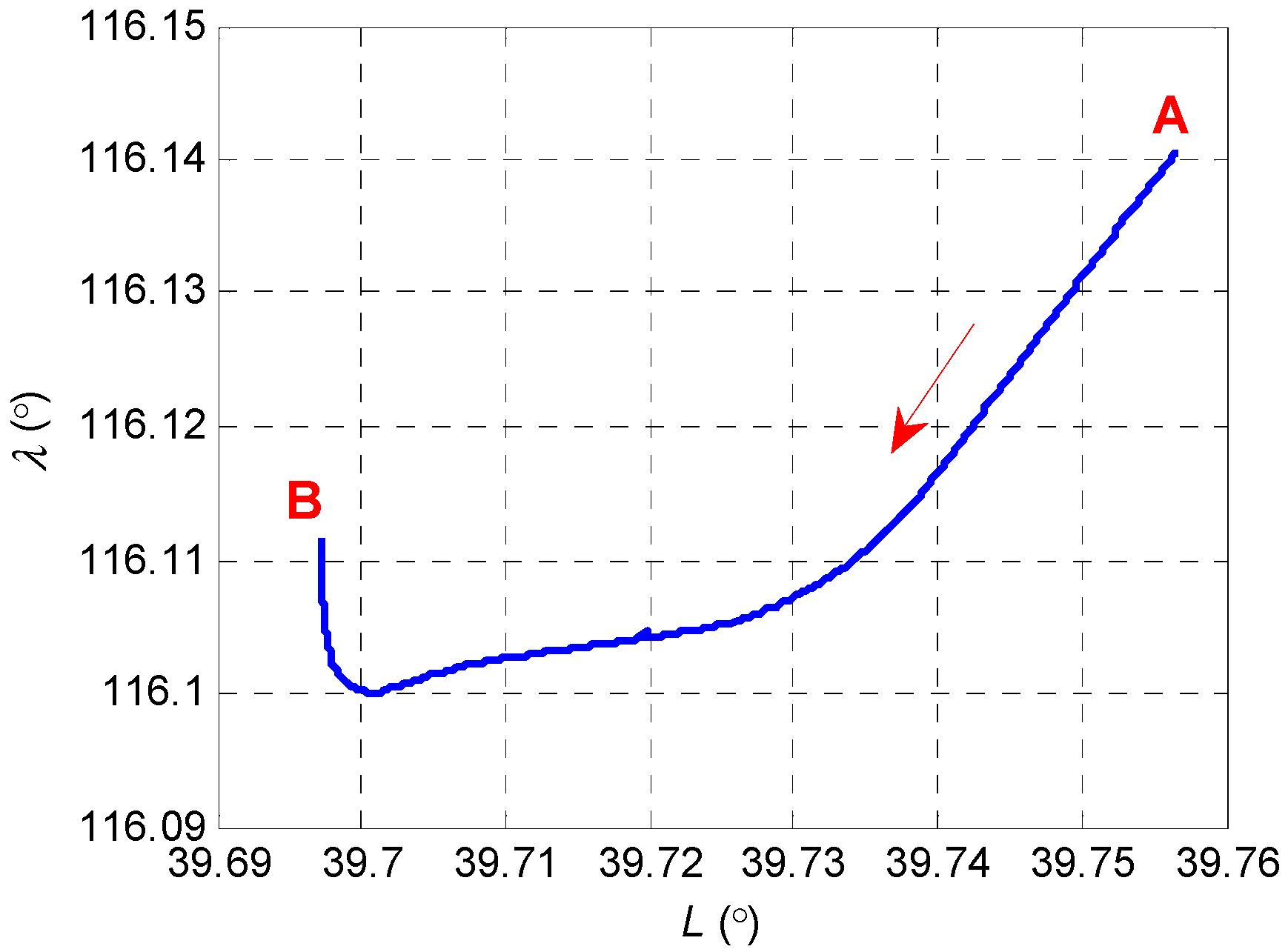
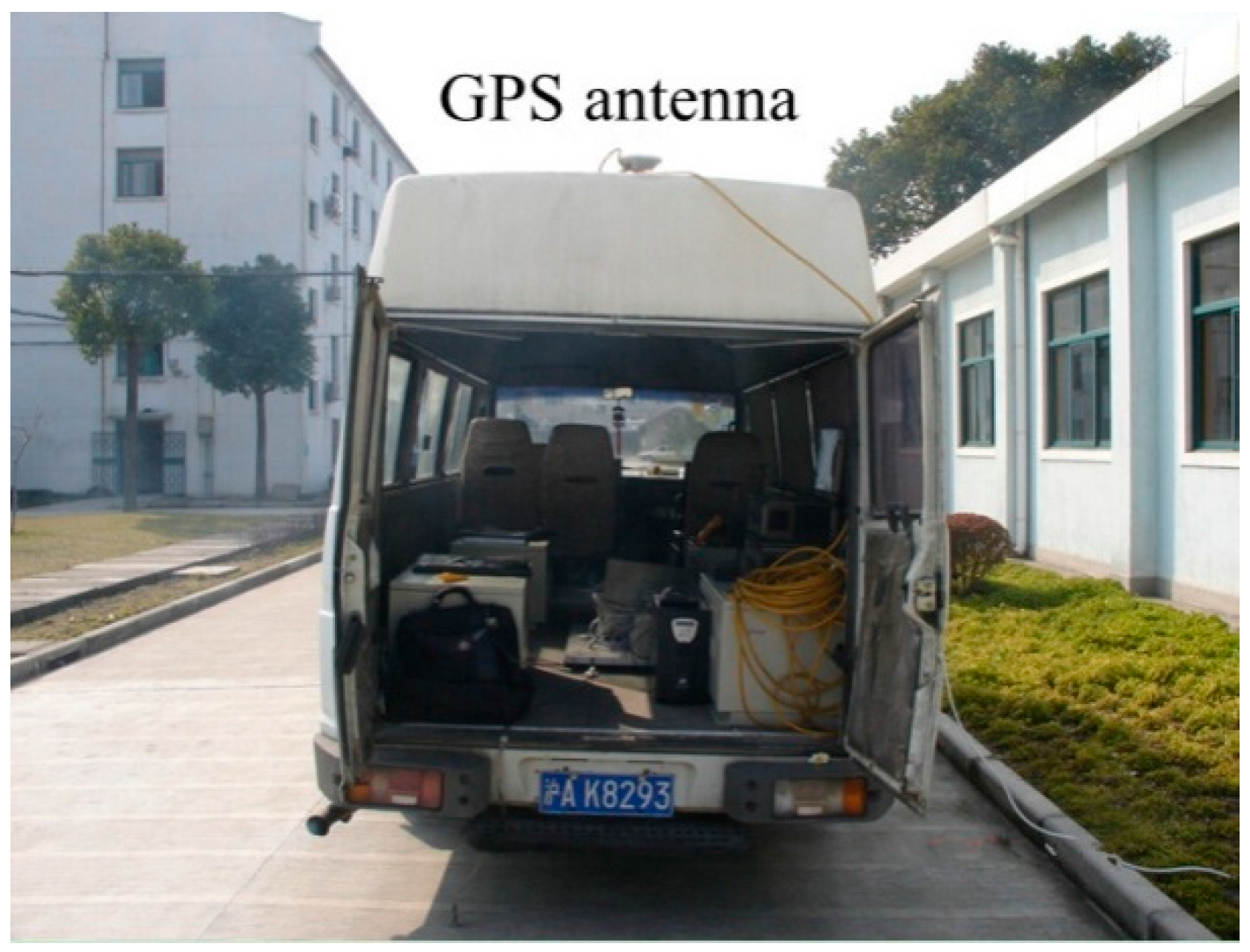
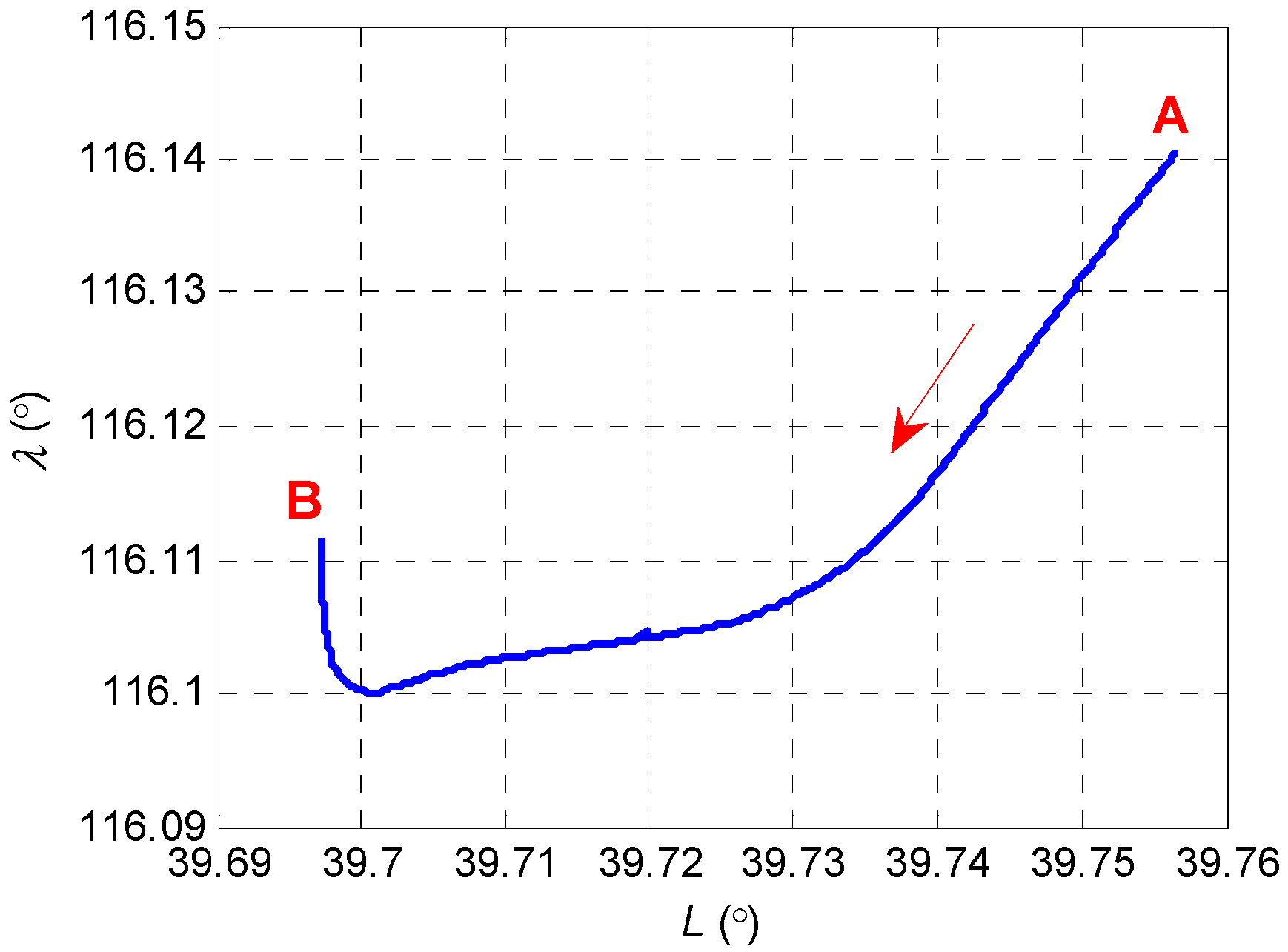
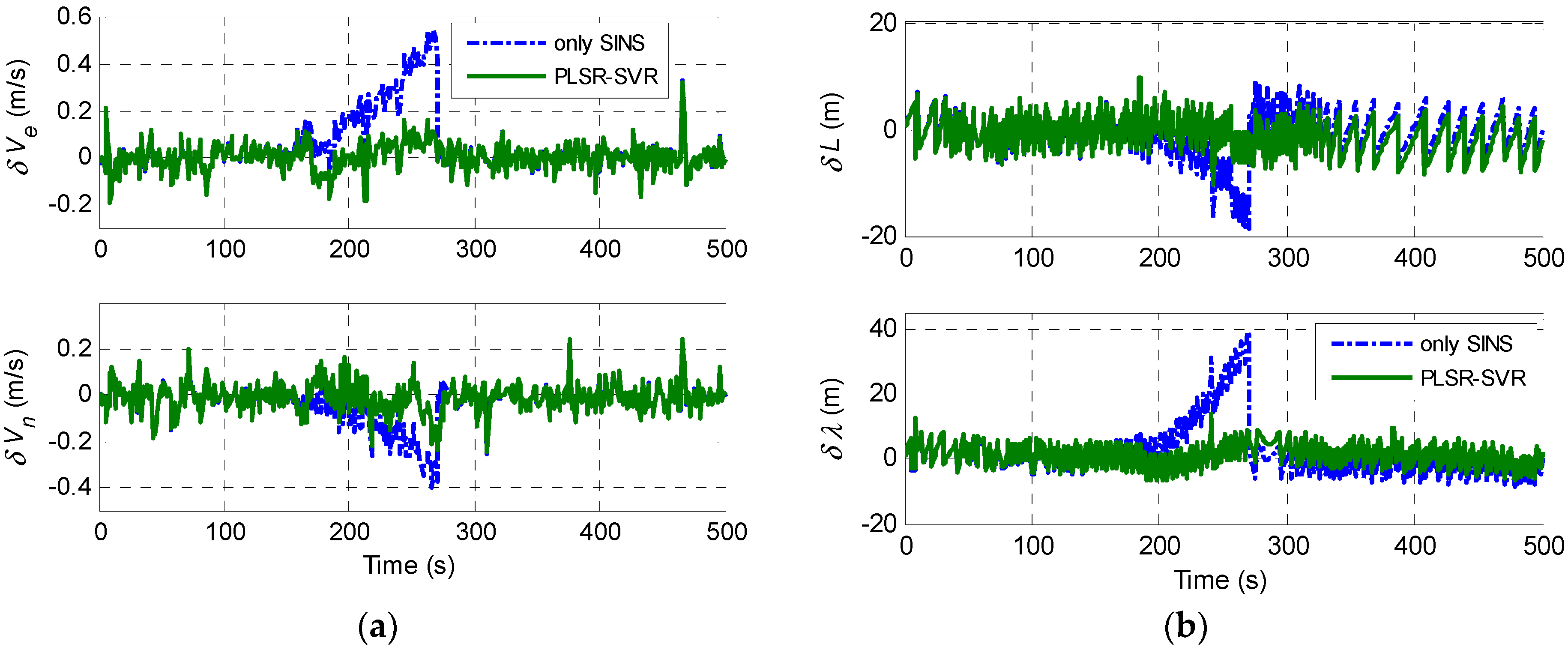
4.2. Field Tests and Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| DVL | Doppler Velocity Log |
| PLSR | Partial Least Squares Regression |
| SVR | Support Vector Regression |
| SINS | Strapdown Inertial Navigation System |
| ROV | Remotely Operated Vehicle |
| AUV | Autonomous Underwater Vehicle |
| IMU | Inertial Measurement Unit |
| KF | Kalman Filter |
| MCP | Magnetic Compass |
| PS | Pressure Sensor |
| GPS | Global Positioning System |
| APS | Acoustic Positioning System |
| GNS | Geophysical Navigation System |
| RBF | Radial Basis Function |
References
- Negahdaripour, S.; Firoozfam, P. An ROV stereovision system for ship-hull inspection. IEEE J. Ocean. Eng. 2006, 31, 551–564. [Google Scholar] [CrossRef]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV navigation and localization: A review. IEEE J. Ocean. Eng. 2014, 39, 131–149. [Google Scholar] [CrossRef]
- Ning, X.L.; Gui, M.Z.; Xu, Y.Z. INS/VNS/CNS integrated navigation method for planetary rovers. Aerosp. Sci. Technol. 2016, 48, 102–114. [Google Scholar] [CrossRef]
- Shabani, M.; Gholami, A. Improved underwater integrated navigation system using unscented filtering approach. J. Navig. 2016, 69, 561–581. [Google Scholar] [CrossRef]
- Wu, D.M.; Wang, Z.Z. Strapdown INS/GPS integrated navigation using geometric algebra. Adv. Appl. Clifford Algebras 2013, 23, 767–785. [Google Scholar] [CrossRef]
- Shabani, M.; Gholami, A.; Davari, N. Asynchronous direct Kalman filtering approach for underwater integrated navigation system. Nonlinear Dyn. 2015, 80, 71–85. [Google Scholar] [CrossRef]
- Li, D.D.; Ji, D.X.; Liu, J. A multi-model EKF integrated navigation algorithm for deep water AUV. Int. J. Adv. Robot. Syst. 2016, 13. [Google Scholar] [CrossRef]
- Hegrenaes, O.; Hallingstad, O.; Gade, K. Towards model-aided navigation of underwater vehicles. Model. Identif. Control 2007, 28, 113–123. [Google Scholar] [CrossRef]
- Tang, K.H.; Wang, J.L.; Li, W.L.; Wu, W.Q. A novel INS and Doppler sensors calibration method for long range underwater vehicle navigation. Sensors 2013, 13, 14583–14600. [Google Scholar] [CrossRef] [PubMed]
- Jalving, B.; Gade, K.; Svartveit, K. DVL velocity aiding in the HUGIN 1000 integrated inertial navigation system. Model. Identif. Control 2004, 25, 223–235. [Google Scholar] [CrossRef]
- Liu, X.X.; Xu, X.S.; Liu, Y.T.; Wang, L.H. Kalman filter for cross-noise in the integration of SINS and DVL. Math. Probl. Eng. 2014, 2014. [Google Scholar] [CrossRef]
- Li, W.L.; Zhang, L.D.; Sun, F.P.; Yang, L.; Chen, M.J.; Li, Y. Alignment calibration of IMU and Doppler sensors for precision INS/DVL integrated navigation. Optik Int. J. Electron Opt. 2015, 126, 3872–3876. [Google Scholar] [CrossRef]
- Lee, C.M.; Lee, P.M.; Hong, S.W.; Kim, S.M. Underwater navigation system based on inertial sensor and Doppler velocity log using indirect feedback Kalman filer. Int. J. Offshore Polar Eng. 2005, 15, 88–95. [Google Scholar]
- Cao, Z.Y.; Zhang, D.L.; Sun, D.J.; Yong, J. A method for testing phased array acoustic Doppler velocity log on land. Appl. Acoust. 2016, 103, 102–109. [Google Scholar] [CrossRef]
- Allotta, B.; Costanzi, R.; Meli, E. An innovative navigation strategy for autonomous underwater vehicles: An unscented Kalman filter based approach. In Proceedings of the ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Boston, MA, USA, 2–5 August 2015. [Google Scholar]
- Gao, W.; Zhang, Y.; Wang, J.G. A strapdown inertial navigation system/Beidou/Doppler velocity log integrated navigation algorithm based on a cubature Kalman filter. Sensors 2014, 14, 1511–1527. [Google Scholar] [CrossRef] [PubMed]
- Mirabadi, A.; Mort, N.; Schmid, F. Fault detection and isolation in multisensor train navigation systems. In Proceedings of the UKACC International Conference on Control, Swansea, Wales, UK, 1–4 September 1998; pp. 969–974. [Google Scholar]
- Brumback, B.D.; Srinath, M.D. A fault-tolerant multisensor navigation system-design. IEEE Trans. Aerosp. Electron. Syst. 1987, 23, 738–756. [Google Scholar] [CrossRef]
- Ushaq, M.; Fang, J.C. A fault tolerant integrated navigation scheme realized through online tuning of weighting factors for federated Kalman filter. In Proceedings of the 2nd International Conference on Mechanics and Control Engineering (ICMCE 2013), Beijing, China, 1–2 September 2013; pp. 1078–1085. [Google Scholar]
- Li, X.; Zhang, W.G. An adaptive fault-tolerant multisensor navigation strategy for automated vehicles. IEEE Trans. Veh. Technol. 2010, 59, 2815–2829. [Google Scholar]
- Liang, Y.Q.; Jia, Y.M. A nonlinear quaternion-based fault-tolerant SINS/GNSS integrated navigation method for autonomous UAVs. Aerosp. Sci. Technol. 2015, 40, 191–199. [Google Scholar] [CrossRef]
- Zhao, L.Y.; Liu, X.J.; Wang, L.; Zhu, Y.H.; Liu, X.X. A pretreatment method for the velocity of DVL based on the motion constraint for the integrated SINS/DVL. Appl. Sci. 2016, 6, 79. [Google Scholar] [CrossRef]
- Semeniuk, L.; Noureldin, A. Bridging GPS outages using neural network estimates of INS position and velocity errors. Meas. Sci. Technol. 2006, 17, 2783–2798. [Google Scholar] [CrossRef]
- Hasan, A.M.; Samsudin, K.; Ramli, A.R.; Azmir, R.S. Automatic estimation of inertial navigation system errors for global positioning system outage recovery. J. Aerosp. Eng. 2011, 225, 86–96. [Google Scholar] [CrossRef]
- Belhajem, I.; Ben Maissa, Y.; Tamtaoui, A. A hybrid low cost approach using extended Kalman filter and neural networks for real time positioning. In Proceedings of the International Conference on Information Technology for Organizations Development, Fez, Morocco, 30 March–1 April 2016. [Google Scholar]
- Gilcoto, M.; Jones, E.; Busto, L.F. Robust estimations of current velocities with four-beam broadband ADCPs. J. Atmosp. Ocean. Technol. 2009, 26, 2642–2654. [Google Scholar] [CrossRef]
- Adusumilli, S.; Bhatt, D.; Wang, H.; Devabhaktuni, V.; Bhattacharya, P. A novel hybrid approach utilizing principal component regression and random forest regression to bridge the period of GPS outages. Neurocomputing 2015, 166, 185–192. [Google Scholar] [CrossRef]
- Al-Alawi, S.M.; Abdul-Wahab, S.A.; Bakheit, C.S. Combining principal component regression and artificial neural networks for more accurate predictions of ground-level ozone. Environ. Model. Softw. 2008, 23, 396–403. [Google Scholar] [CrossRef]
- Wold, S.; Albano, C.; Dunn, M.; Esbensen, K.; Hellberg, S.; Johansson, E. Pattern Regression Finding and Using Regularities in Multivariate Data; Analysis Applied Science Publication: London, UK, 1983. [Google Scholar]
- Samkar, H.; Guven, G. Comparison of PLSR and PCR techniques in terms of dimension reduction: An application on internal migration data in Turkey. Int. J. Adv. Appl. Sci. 2016, 3, 7–13. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Kavousi-Fard, A.; Samet, H.; Marzbani, F. A new hybrid modified firefly algorithm and support vector regression model for accurate short term load forecasting. Expert Syst. Appl. 2014, 41, 6047–6056. [Google Scholar] [CrossRef]
- Cheng, C.H.; Yang, J.H. A novel rainfall forecast model based on the integrated non-linear attribute selection method and support vector regression. J. Intell. Fuzzy Syst. 2016, 31, 915–925. [Google Scholar] [CrossRef]
- Pang, C.P.; Liu, Z.Z. Bridging GPS outages of tightly coupled GPS/SINS based on the adaptive track fusion using RBF neural network. In Proceedings of the IEEE International Symposium on Industrial Electronics, Seoul, Korea, 5–8 July 2009. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instruments | Parameters | Accuracy |
|---|---|---|
| IMU | Gyroscope in run bias stability | 1°/hr (1σ) |
| Gyroscope angular random walk | 0.0667°/√hr (1σ) | |
| Accelerometer in run bias variation | 0.25 mg (1σ) | |
| Accelerometer output noise | 55 μg/√Hz (1σ) | |
| DVL | Velocity | ±1% ± 2 mm/s |
| MCP | Heading | ±0.5° |
| PS | Depth | ±0.01% |
| Motions States | Time (s) |
|---|---|
| Accelerated motion | 0~10 |
| Uniform motion | 10~110, 170~270, 330~430, 630~870, 1070~1170, 1230~1330, 1390~1490 |
| Diving motion | 110~170, 1330~1390 |
| Surfacing motion | 270~330, 1170~1230 |
| Left turning motion | 430~630 |
| Right turning motion | 870~1070 |
| Decelerated motion | 1490~1500 |
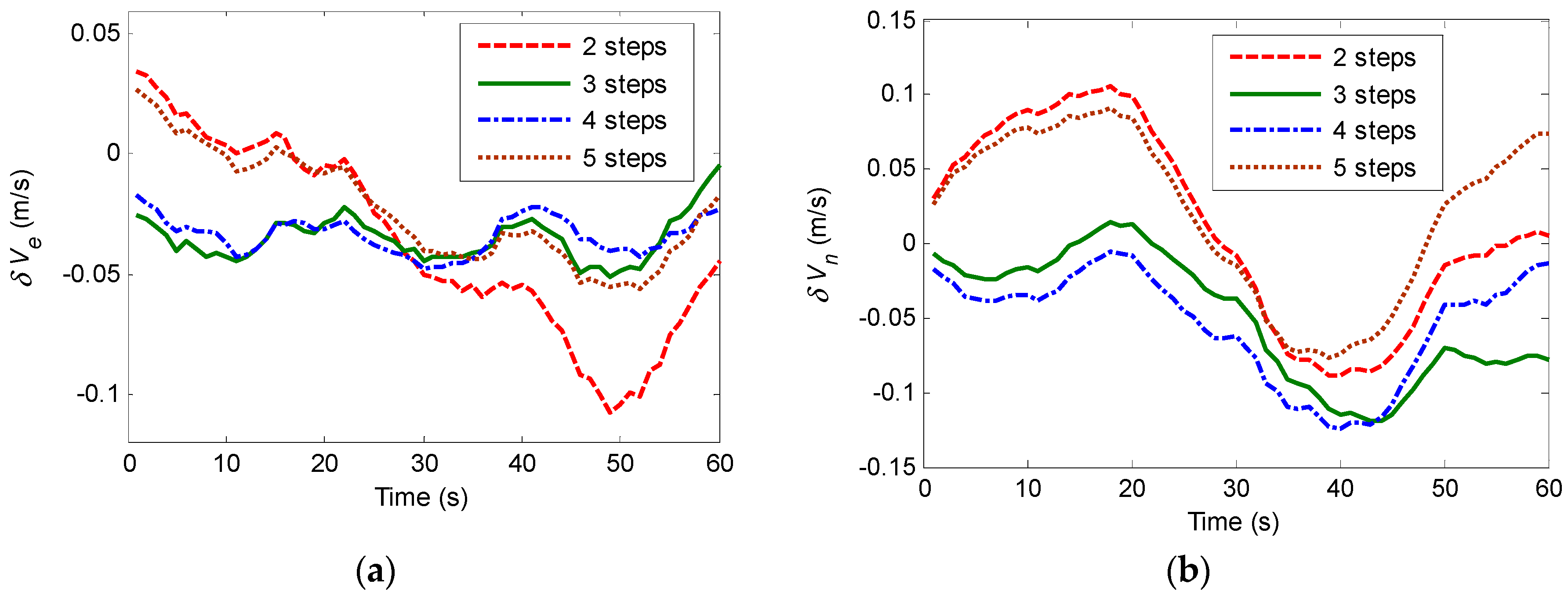
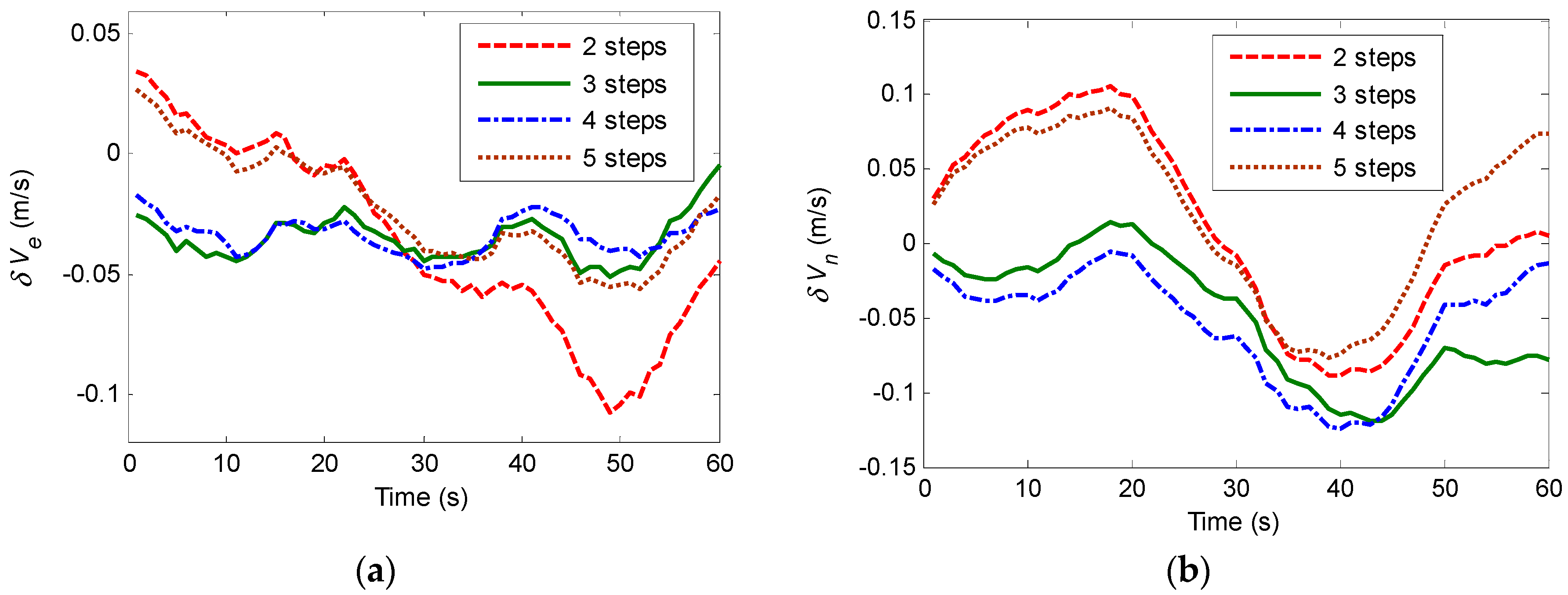
| Step Number | East Velocity Error (m/s) | North Velocity Error (m/s) | Computation Consumption (s) | ||
|---|---|---|---|---|---|
| Maximum | RMS | Maximum | RMS | ||
| 2 steps | 0.1081 | 0.0545 | 0.1249 | 0.0663 | 0.005945 |
| 3 steps | 0.0514 | 0.0364 | 0.1055 | 0.0647 | 0.006277 |
| 4 steps | 0.0479 | 0.0346 | 0.1196 | 0.0639 | 0.006755 |
| 5 steps | 0.0561 | 0.0326 | 0.0911 | 0.0630 | 0.007651 |
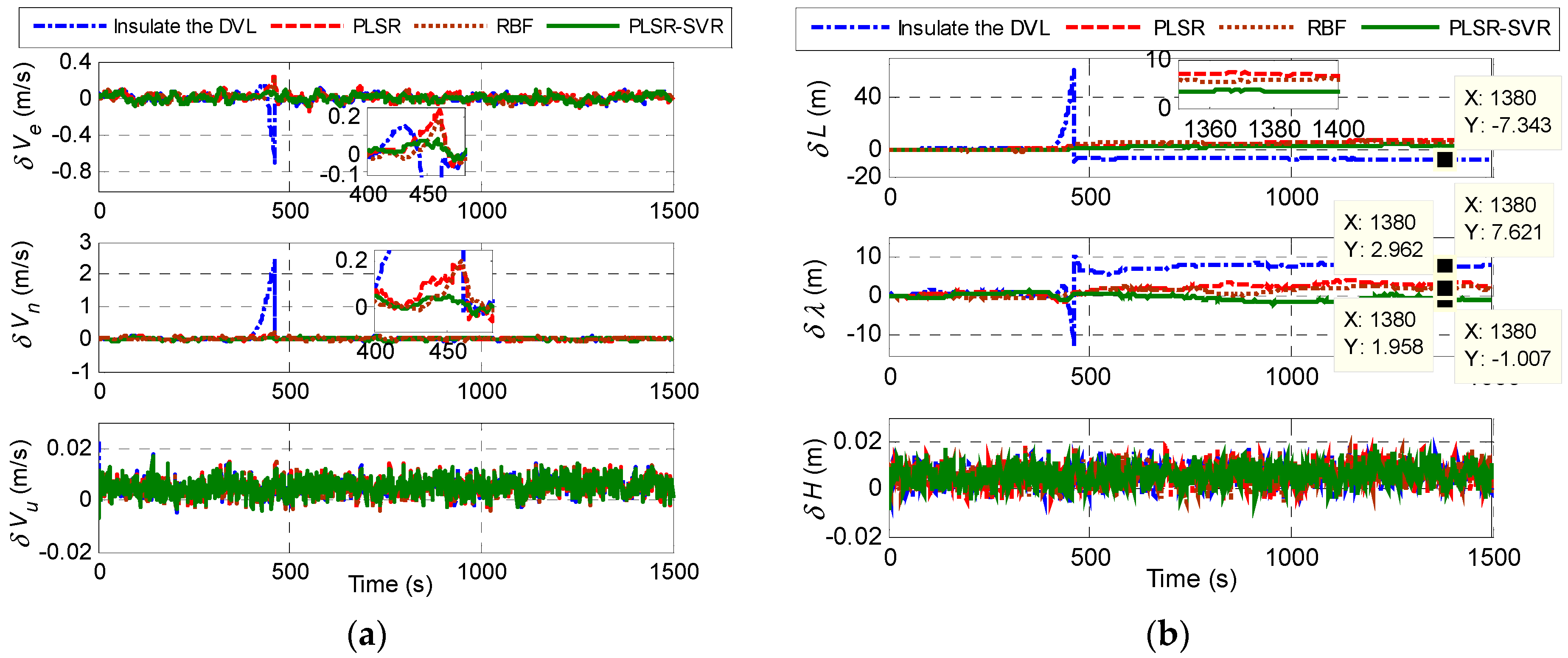
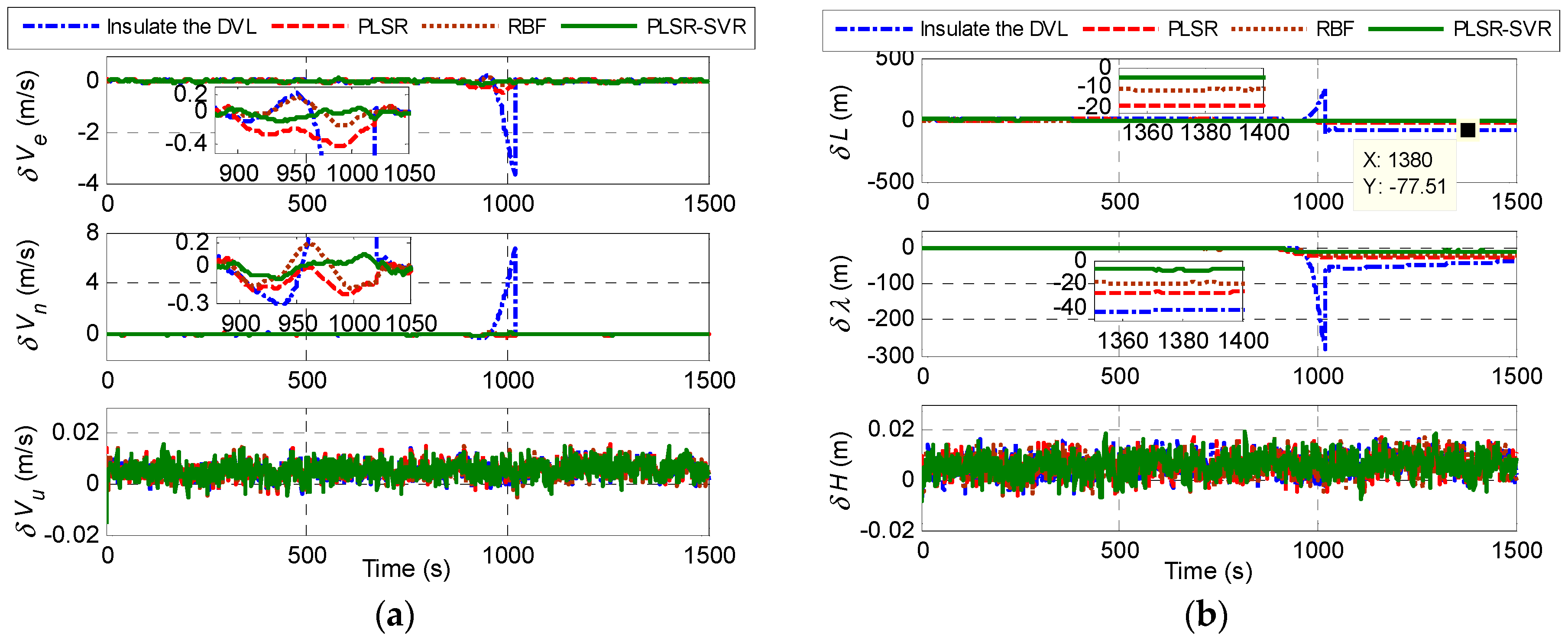
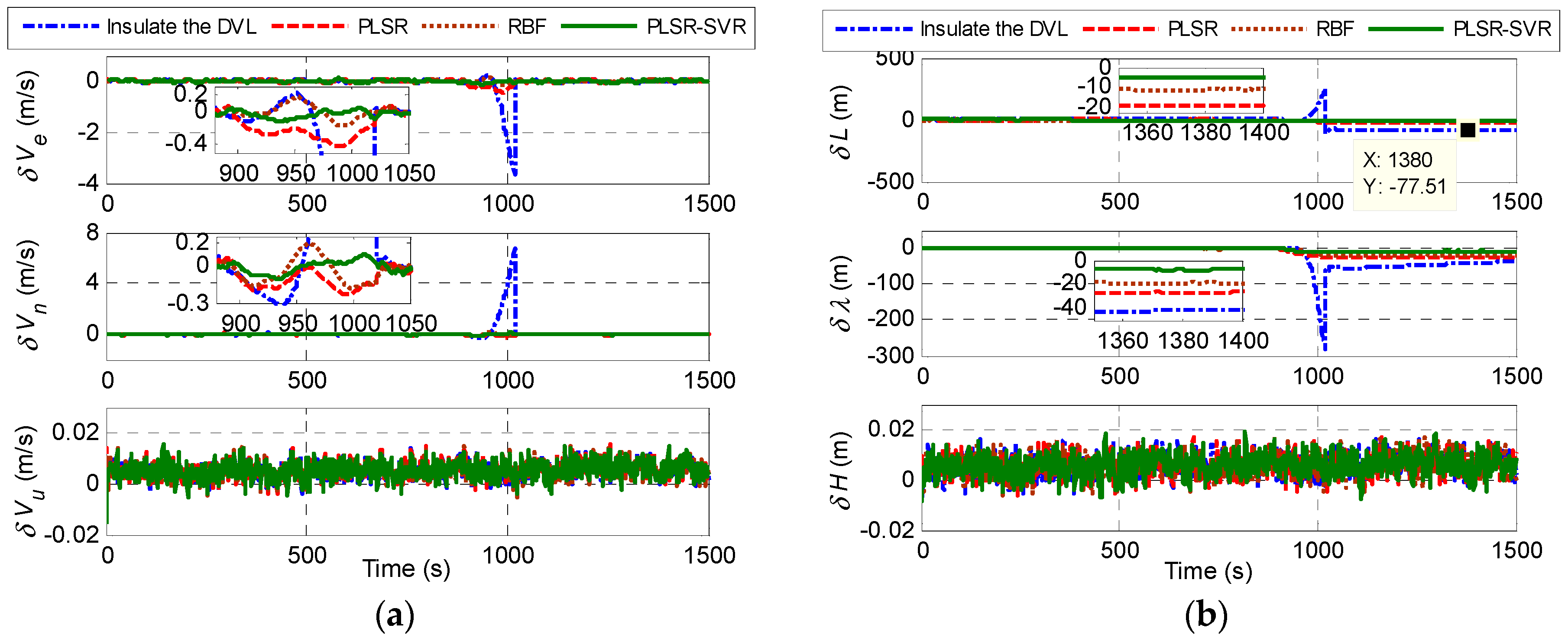
| Malfunctions Length | Solution | Absolute Maximum Velocity Error (m/s) | Absolute Maximum Position Error (m) | ||
|---|---|---|---|---|---|
| East | North | Latitude | Longitude | ||
| 60 s | Insulate DVL PLSR RBF PLSR-SVR | 0.6869 | 2.438 | 61.03 | 12.92 |
| 0.2366 | 0.1744 | 2.792 | 1.705 | ||
| 0.1907 | 0.2032 | 4.045 | 1.693 | ||
| 0.0793 | 0.0544 | 0.8216 | 1.224 | ||
| 120 s | Insulate DVL PLSR RBF PLSR-SVR | 3.63 | 6.679 | 251.6 | 280.2 |
| 0.4306 | 0.2311 | 18.69 | 25.49 | ||
| 0.1672 | 0.189 | 12.04 | 20.08 | ||
| 0.1261 | 0.1059 | 6.1113 | 8.783 | ||
| Instruments | Parameters | Accuracy |
|---|---|---|
| IMU | Gyroscope in run bias stability | 0.03°/hr (1σ) |
| Gyroscope angular random walk | 0.005°/√hr (1σ) | |
| Accelerometer in run bias variation | 0.2 mg (1σ) | |
| Accelerometer output noise | 50 μg/√Hz (1σ) | |
| GPS | Velocity | 0.1 m/s |
| Position | 10 m |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Y.; Cheng, X.; Hu, J.; Zhou, L.; Fu, J. A Novel Hybrid Approach to Deal with DVL Malfunctions for Underwater Integrated Navigation Systems. Appl. Sci. 2017, 7, 759. https://doi.org/10.3390/app7080759
Zhu Y, Cheng X, Hu J, Zhou L, Fu J. A Novel Hybrid Approach to Deal with DVL Malfunctions for Underwater Integrated Navigation Systems. Applied Sciences. 2017; 7(8):759. https://doi.org/10.3390/app7080759
Chicago/Turabian StyleZhu, Yixian, Xianghong Cheng, Jie Hu, Ling Zhou, and Jinbo Fu. 2017. "A Novel Hybrid Approach to Deal with DVL Malfunctions for Underwater Integrated Navigation Systems" Applied Sciences 7, no. 8: 759. https://doi.org/10.3390/app7080759