
Performance Analysis and Design Strategy for a Second-Order, Fixed-Gain, Position-Velocity-Measured (α-β-η-θ) Tracking Filter


Abstract
Featured Application
Abstract
1. Introduction
- Simple implementation and low computational overhead: Optimal gain calculation is not required in the fixed-gain filters. Thus, the number of matrix operations is small compared with the Kalman filter and its variants [11].
- Applicability to the analytical evaluation of the Kalman filter: Fixed-gain filters are also useful for analytical evaluations of the Kalman filter because they can be characterized as steady state Kalman filters [12].
2. Definitions of Problem and Symbols
3. The --- Filter
3.1. Definition
3.2. The - Filter
3.3. Relationship to Kalman Filters
3.4. Optimal Filter for a Random-Acceleration Model and Its Problems
4. Derivation of Performance Indices and Stability Conditions
4.1. Smoothing Performance Index
4.2. Tracking Performance Index
4.3. RMS Index
4.4. Stability Condition
5. Optimal Gain Design Strategy
5.1. Optimal Gain Design Using the RMS Index
- The selection of an appropriate model (e.g., RA, random-velocity) is not considered. Thus, this selection is conducted empirically [4].
5.2. Procedure and Notes of the Proposed Strategy
- Set from the sensor performance.
- Design based on the approximate target acceleration.
- Determine , and by solving Equation (32).
- Determine with Equation (17).
- Equation (32) can be solved by simple gradient descent with several initial values [33]. This is because the range of parameter searching is not so wide due to the stability conditions.
- This design process is conducted only once before using the filter. Although the computational costs of the above optimization process are not small, this does not affect the simple tracking process of the --- filters.
5.3. Relationship with Steady State PVM Kalman Filters
6. Steady State Performance Analysis
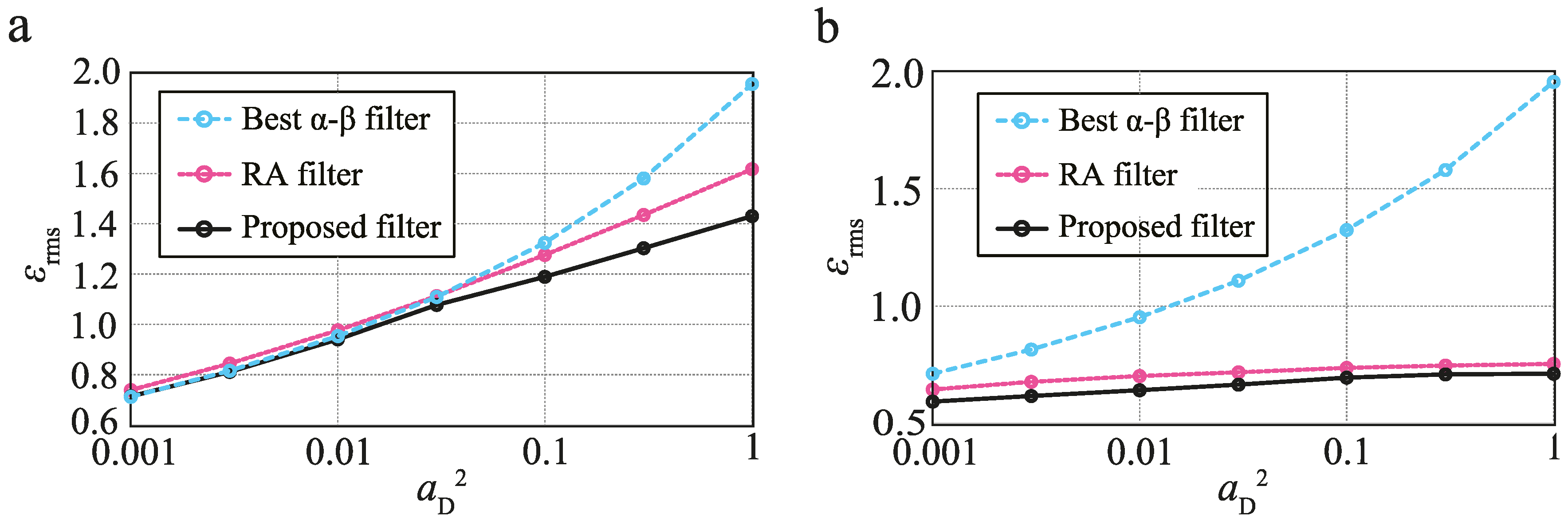
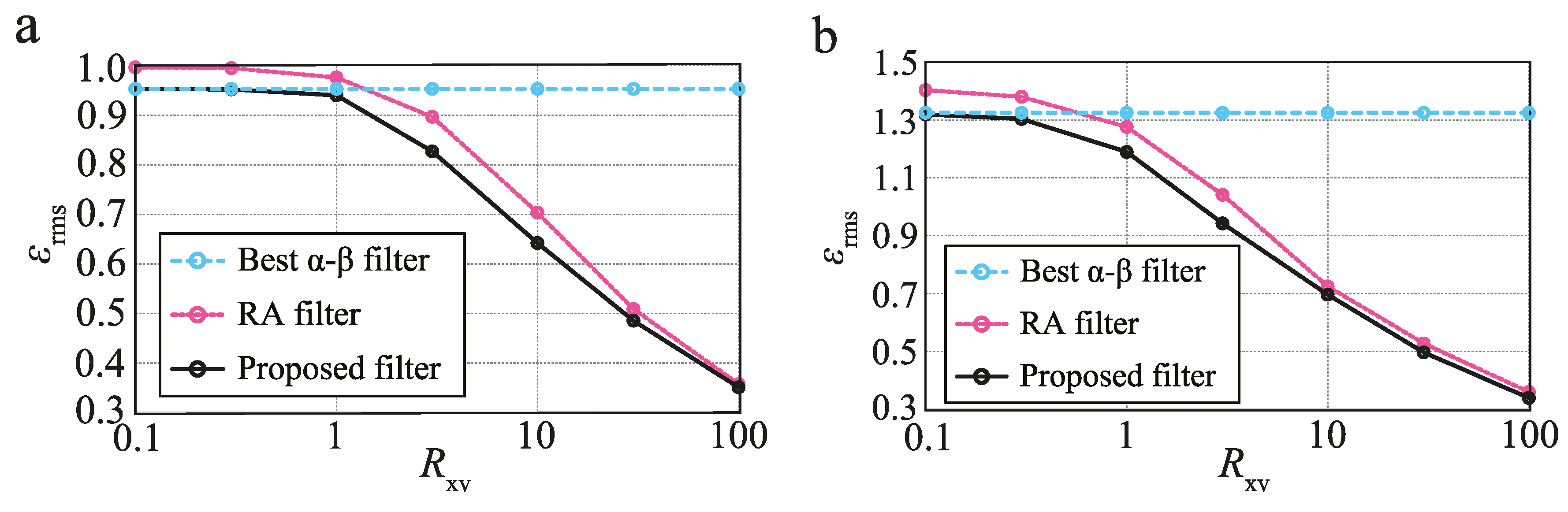
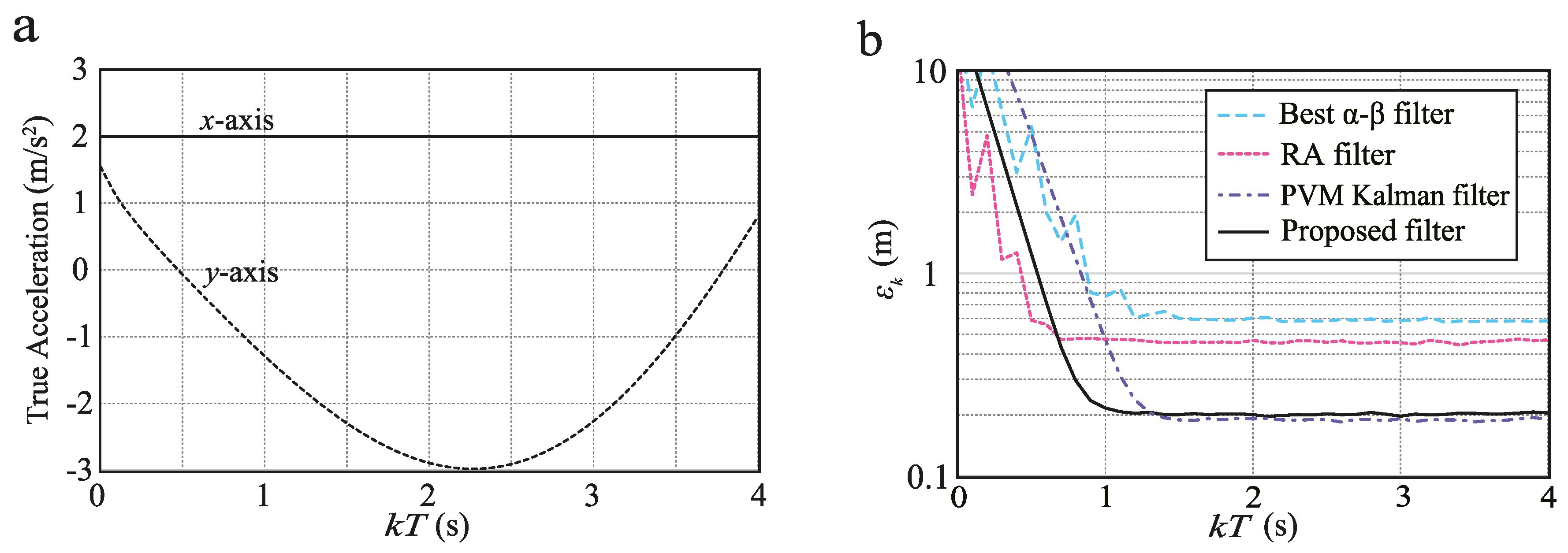
- Proposed filter: the --- filter with the proposed strategy.
- RA filter: the --- filter with the RA model using optimal q (from Equation (16)) with respect to the RMS index.
- Best - filter: the conventional - filter obtained with the proposed strategy, assuming .
6.1. Relationship between Performance and
6.2. Relationship between Performance and
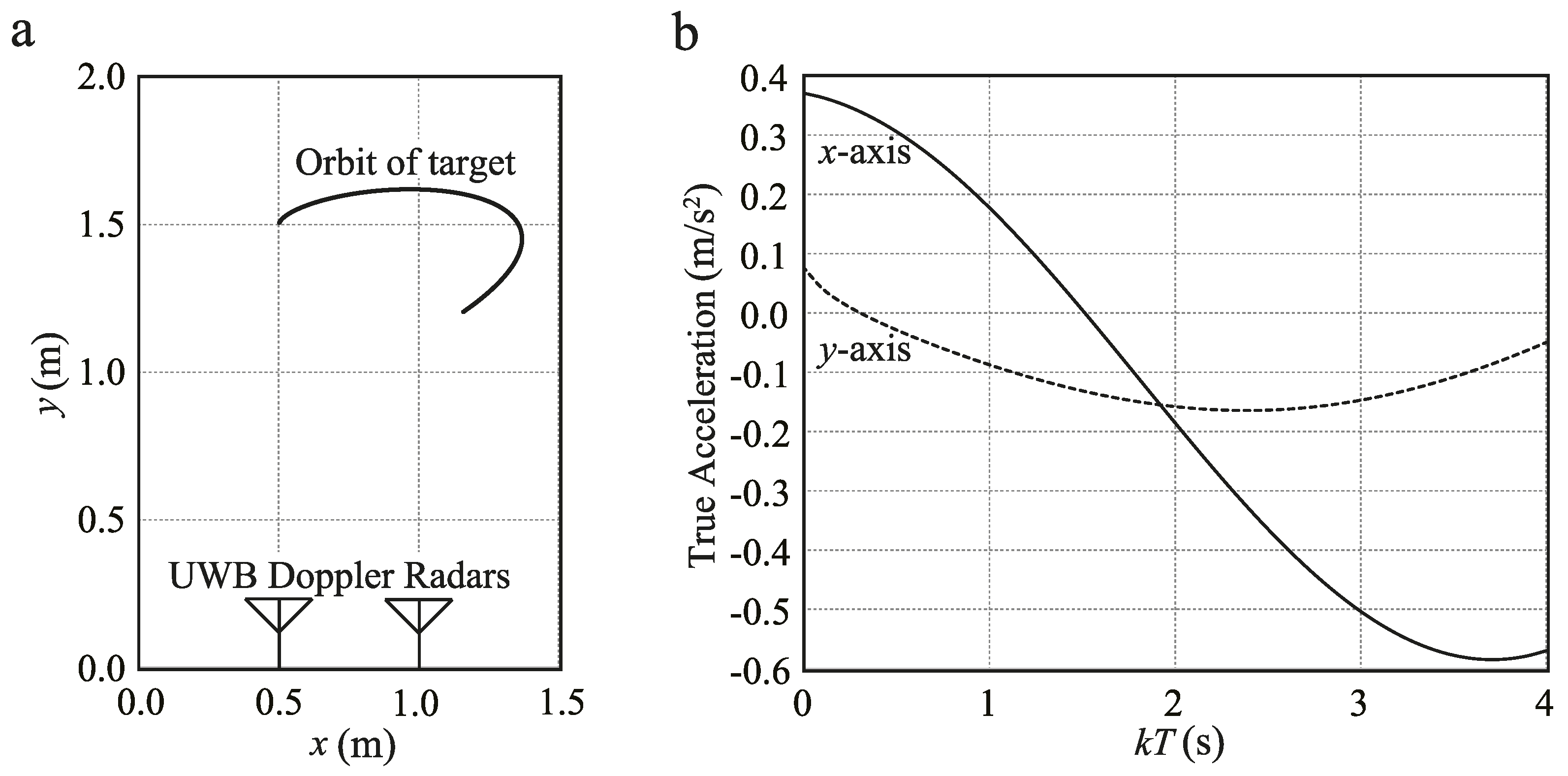
7. Application to UWB Doppler Radar Simulation
- Medium maneuvering target assuming simple near-field sensing.
- High maneuvering target assuming the target executes an abrupt motion.
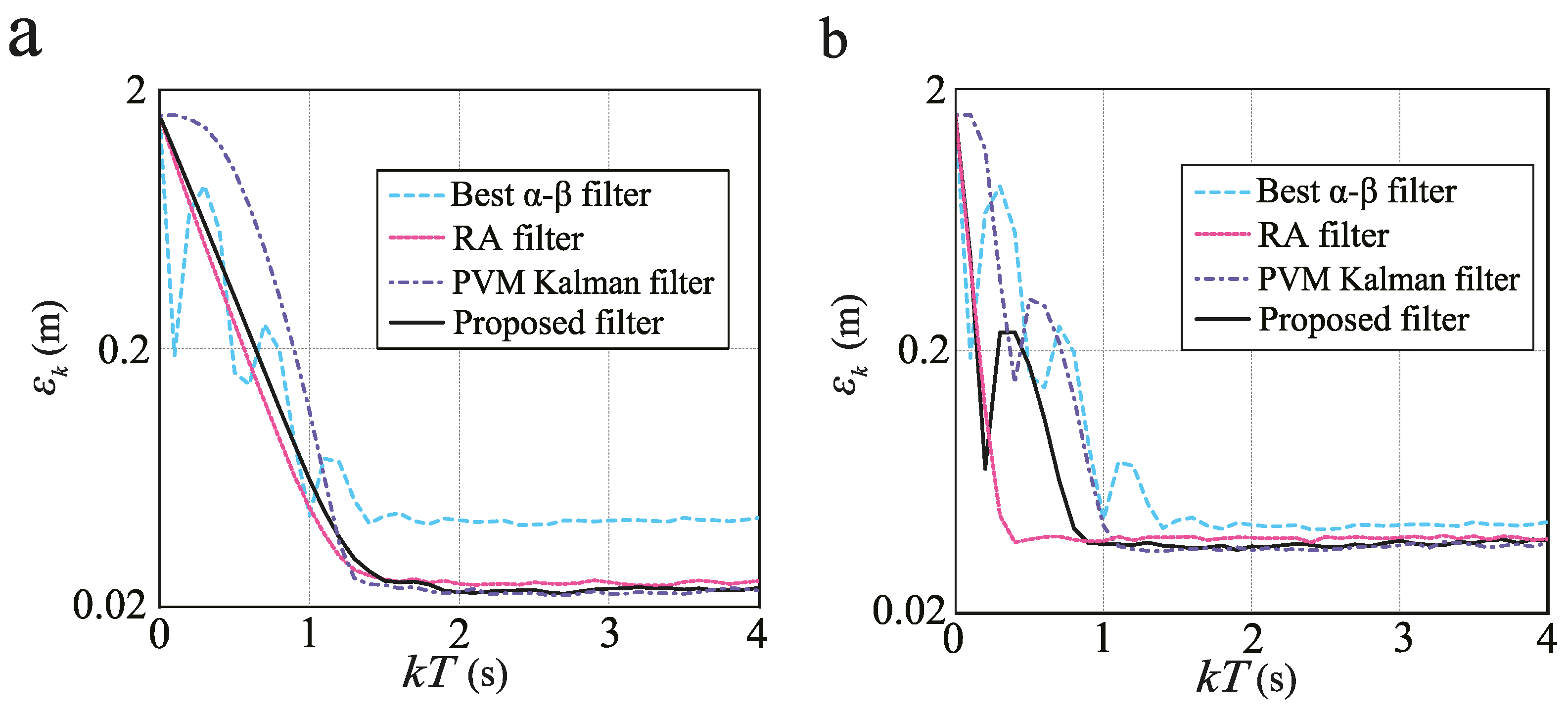
7.1. Tracking of Medium Maneuvering Target
7.1.1. Simulation Setup
7.1.2. Filter Design
7.1.3. Evaluation Results
7.2. Tracking of High-Maneuvering Target
8. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| UWB | Ultra-wideband |
| PVM | Position-velocity-measured |
| RA | Random-acceleration |
| RMS | Root-mean-square |
Appendix A. Derivation of Equation (20)
Appendix B. Derivation of Equation (26)
Appendix C. Derivation of Equations (34)–(36)
References
- Wu, K.; Cai, Z.; Zhao, J.; Wang, Y. Target Tracking Based on a Nonsingular Fast Terminal Sliding Mode Guidance Law by Fixed-Wing UAV. Appl. Sci. 2017, 7, 333. [Google Scholar] [CrossRef]
- Fan, Y.; Lu, F.; Zhu, W.; Bai, G.; Yan, L. A Hybrid Model Algorithm for Hypersonic Glide Vehicle Maneuver Tracking Based on the Aerodynamic Model. Appl. Sci. 2017, 7, 159. [Google Scholar] [CrossRef]
- Li, W.; Sun, S.; Jia, Y.; Du, J. Robust unscented Kalman filter with adaptation of process and measurement noise covariances. Digit. Signal Process. 2016, 48, 93–103. [Google Scholar] [CrossRef]
- Saho, K.; Masugi, M. Automatic Parameter Setting Method for an Accurate Kalman Filter Tracker Using an Analytical Steady-State Performance Index. IEEE Access 2015, 3, 1919–1930. [Google Scholar] [CrossRef]
- Jin, B.; Jiu, B.; Su, T.; Liu, H.; Liu, G. Switched Kalman filter-interacting multiple model algorithm based on optimal autoregressive model for manoeuvring target tracking. IET Radar Sonar Navig. 2015, 9, 199–209. [Google Scholar] [CrossRef]
- Martino, L.; Read, J.; Elvira, V.; Louzada, F. Cooperative Parallel Particle Filters for on-Line Model Selection and Applications to Urban Mobility. Digit. Signal Process. 2017, 60, 172–185. [Google Scholar] [CrossRef]
- Drovandi, C.C.; McGree, J.; Pettitt, A.N. A sequential Monte Carlo algorithm to incorporate model uncertainty in Bayesian sequential design. J. Comput. Graph. Stat. 2014, 23, 324. [Google Scholar] [CrossRef]
- Crouse, D.F. A general solution to optimal fixed-gain (α-β-γ etc.) filters. IEEE Signal Process. Lett. 2015, 22, 901–904. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Li, X.R. Estimation and Tracking: Principles, Techniques, and Software; Artech House Publishers: Boston, MA, USA, 1998. [Google Scholar]
- Kalata, P.R. The Tracking Index: A Generalized Parameter for α-β and α-β-γ Target Trackers. IEEE Trans. Aerosp. Electron. Syst. 1984, AES-20, 174–182. [Google Scholar] [CrossRef]
- Saho, K.; Masugi, M. Performance analysis of alpha-beta-gamma tracking filters using position and velocity measurements. EURASIP J. Adv. Signal Process. 2015, 2015, 35. [Google Scholar] [CrossRef]
- Ekstrand, B. Some Aspects on Filter Design for Target Tracking. J. Control Sci. Eng. 2012, 2012. [Google Scholar] [CrossRef]
- O’Shea, T.P.; Bamber, J.C.; Harris, E.J. Temporal regularization of ultrasound-based liver motion estimation for image-guided radiation therapy. Med. Phys. 2016, 43, 455–464. [Google Scholar] [CrossRef] [PubMed]
- Khin, N.H.; Che, Y.F.; Eileen, S.M.L.; Liang, W.X. Alpha Beta Gamma Filter for Cascaded PID Motor Position Control. Procedia Eng. 2012, 41, 244–250. [Google Scholar]
- Lee, Y.S.; Lee, H.J. Multiple object tracking for fall detection in real-time surveillance system. In Proceedings of the International Conference Advanced Communication Technology 2009 (ICACT2009), Phoenix Park, Korea, 15–18 February 2009; pp. 2308–2312. [Google Scholar]
- Matsunami, I.; Nakamura, R.; Kajiwara, A. Target State Estimation Using RCS Characteristics for 26 GHz Short-Range Vehicular Radar. In Proceedings of the IEEE 2013 International Conference on Radar, Adelaide, SA, Australia, 9–12 September 2013; pp. 304–308. [Google Scholar]
- Jatoth, R.K.; Gopisety, S.; Hussain, M. Performance Analysis of Alpha Beta Filter, Kalman Filter and Meanshift for Object Tracking in Video Sequences. Int. J. Image Graph. Signal Process. 2015, 7, 24–30. [Google Scholar] [CrossRef]
- Abdelkrim, M.; Mohammed, D.; Mokhtar, K.; Abdelaziz, O. A simplified alpha-beta based Gaussian sum filter. AEU Int. J. Electron. Commun. 2013, 67, 313–318. [Google Scholar] [CrossRef]
- Mohammed, D.; Mokhtar, K.; Abdelaziz, O.; Abdelkrim, M. A new IMM algorithm using fixed coefficients filters (fast IMM). AEU Int. J. Electron. Commun. 2009, 64, 1123–1127. [Google Scholar] [CrossRef]
- Ma, K.; Chang, Y.; Li, H.; Gao, J. A new method of target tracking in Ultra-Short-Range Radar. In Proceedings of the International Conference on Computer Science and Network Technology (ICCSNT2013), Dalian, China, 12–13 October 2013; pp. 10–12. [Google Scholar]
- Wang, Y. Feature point correspondence between consecutive frames based on genetic algorithm. Int. J. Robot. Autom. 2006, 21, 35–38. [Google Scholar] [CrossRef]
- Yoo, J.C.; Kim, Y.S. Alpha-beta-tracking index (α-β-Λ) tracking filter. Signal Process. 2003, 83, 169–180. [Google Scholar] [CrossRef]
- Dai, X.; Zhou, Z.; Zhang, J.J.; Davidson, B. Ultra-wideband radar-based accurate motion measuring: Human body landmark detection and tracking with biomechanical constraints. IET Radar Sonar Navig. 2015, 9, 154–163. [Google Scholar] [CrossRef]
- Saho, K.; Sakamoto, T.; Sato, T.; Inoue, K.; Fukuda, T. Pedestrian imaging using UWB Doppler radar interferometry. IEICE Trans. Commun. 2013, E96-B, 613–623. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Q.; Fathy, A.E. CW and pulse-Doppler radar processing based on FPGA for human sensing applications. IEEE Trans. Geosci. Remote Sens. 2013, 51, 3097–3107. [Google Scholar] [CrossRef]
- Zhoua, G.; Wub, L.; Xiea, J.; Denga, W.; Quan, T. Constant turn model for statically fused converted measurement Kalman filters. Signal Process. 2015, 108, 400–411. [Google Scholar] [CrossRef]
- Jahromi, M.J.; Bizaki, H.K. Target Tracking in MIMO Radar Systems Using Velocity Vector. J. Inf. Syst. Telecommun. 2014, 2, 150–158. [Google Scholar]
- Geetha, B.; Ramachandra, K.V. A Three State Kalman Filter with Range and Range-Rate Measurements. Int. J. Comput. Appl. 2013, 3, 85–101. [Google Scholar]
- Yoon, J.H.; Kim, D.Y.; Bae, S.H.; Shin, V. Joint Initialization and Tracking of Multiple Moving Objects Using Doppler Information. IEEE Trans. Signal Process. 2011, 59, 3447–3452. [Google Scholar] [CrossRef]
- Saho, K. Fundamental properties and optimal gains of a steady state velocity measured α-β tracking filter. Adv. Remote Sens. 2014, 3, 61–76. [Google Scholar] [CrossRef]
- Sudano, J.J. The alpha-beta-eta-theta tracker with a random acceleration process noise. In Proceedings of the IEEE National Aerospace and Electronics Conference (NEACON2000), Dayton, OH, USA, 10–12 October 2000; pp. 165–171. [Google Scholar]
- Jury, E.I. Theory and Application of the z-Transform Method; John Wiley and Sons: NewYork, NY, USA, 1964. [Google Scholar]
- Baldi, P. Gradient Descent Learning Algorithm Overview: A General Dynamical Systems Perspective. IEEE Trans. Neural Netw. 1995, 6, 182–195. [Google Scholar] [CrossRef] [PubMed]
- Gelb, A. Applied Optimal Estimation; The M.I.T. PRESS: Cambridge, MA, USA, 1974. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Description | Unit |
|---|---|---|
| T | Sampling interval | (s) |
| k | Discrete sampling index | Dimensionless |
| Parameter at index k | ||
| Predicted position | (m) | |
| Predicted velocity | (m/s) | |
| Smoothed (estimated) position | (m) | |
| Smoothed (estimated) velocity | (m/s) | |
| Observed (measured) position | (m) | |
| Observed (measured) velocity | (m/s) | |
| Filter gain for with respect to | Dimensionless | |
| Filter gain for with respect to | Dimensionless | |
| Filter gain for with respect to | Dimensionless | |
| Filter gain for with respect to | Dimensionless | |
| Forecasts | ||
| Estimates | ||
| Transpose of matrix | ||
| Inversion of matrix | ||
| State vector of target composed of position and velocity | ||
| Measurement vector | ||
| Transition matrix from k to | ||
| Error covariance matrix with respect to | ||
| Covariance matrix of process noise | ||
| Kalman gain matrix | ||
| Covariance matrix of measurement noise | ||
| Error variance of | (m) | |
| Error variance of | (m/s) | |
| Process noise matrix in random-acceleration (RA) model | ||
| q | Variance of random-acceleration (RA) process noise | (m/s) |
| Ratio of to | Dimensionless | |
| E | Mean with respect to k | |
| Smoothing performance index | (m) | |
| Tracking performance index | (m) | |
| Acceleration assumed in the derivation of | (m/s) | |
| Root-mean-square (RMS) index | (m) | |
| Evaluating function in the proposed gain design strategy | Dimensionless | |
| Design parameter for the proposed strategy | Dimensionless | |
| Arbitrary process noise matrix | ||
| a | (1,1) element of | (m) |
| b | (1,2) (or (2,1)) element of | (m/s) |
| c | (2,2) element of | (m/s) |
| RMS prediction error of Monte Carlo simulations | (m) |
| Tracking Filter | Input | Design Strategy | Preset Parameter | |
|---|---|---|---|---|
| - filter | Position | Based on RA model [12] | q or tracking index [10] | Kalman filter |
| Proposed strategy | of Equation (31) | |||
| --- filter | Position | Based on RA model [27] | q or tracking index [10] | Position-velocity-measured |
| and velocity | Proposed strategy | of Equation (31) | (PVM) Kalman filter |
| (m/s) | Mean Steady State RMS Error (cm) | |
|---|---|---|
| 0.1 | 0.00111 | 2.82 |
| 0.4 | 0.0178 | 2.32 |
| 0.6 | 0.040 | 2.33 |
| 1.0 | 0.111 | 2.57 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saho, K.; Masugi, M. Performance Analysis and Design Strategy for a Second-Order, Fixed-Gain, Position-Velocity-Measured (α-β-η-θ) Tracking Filter. Appl. Sci. 2017, 7, 758. https://doi.org/10.3390/app7080758
Saho K, Masugi M. Performance Analysis and Design Strategy for a Second-Order, Fixed-Gain, Position-Velocity-Measured (α-β-η-θ) Tracking Filter. Applied Sciences. 2017; 7(8):758. https://doi.org/10.3390/app7080758
Chicago/Turabian StyleSaho, Kenshi, and Masao Masugi. 2017. "Performance Analysis and Design Strategy for a Second-Order, Fixed-Gain, Position-Velocity-Measured (α-β-η-θ) Tracking Filter" Applied Sciences 7, no. 8: 758. https://doi.org/10.3390/app7080758
APA StyleSaho, K., & Masugi, M. (2017). Performance Analysis and Design Strategy for a Second-Order, Fixed-Gain, Position-Velocity-Measured (α-β-η-θ) Tracking Filter. Applied Sciences, 7(8), 758. https://doi.org/10.3390/app7080758