State of the Art: Bipedal Robots for Lower Limb Rehabilitation

1
Department of Mechanical and Biomedical Engineering, University of Hong Kong, Tat Chee Avenue, Kowloon, Hong Kong 999077, China
2
Beijing Institute of Technology, No.5 Yard, Zhong Guan Cun South Street, Haidian District, Beijing 100000, China
3
Centre for Robotics and Automation, CityU Shen Zhen Research Institute, Shen Zhen 518000, China
*
Author to whom correspondence should be addressed.
†
These authors contributed equally to this work.
Appl. Sci. 2017, 7(11), 1182; https://doi.org/10.3390/app7111182
Submission received: 5 October 2017
/
Revised: 3 November 2017
/
Accepted: 3 November 2017
/
Published: 16 November 2017
(This article belongs to the Special Issue Bio-Inspired Robotics)
Abstract
:The bipedal robot is one of the most attractive robots types given its similarity to the locomotion of human beings and its ability to assist people to walk during rehabilitation. This review summarizes the chronological historical development of bipedal robots and introduces some current popular bipedal robots age. Then, the basic theory-stability control and key technology-motion planning of bipedal robots are introduced and analyzed. Bipedal robots have a wide range of applications in the service, education, entertainment, and other industries. After that, we specifically discuss the applications of bipedal robots in lower limb rehabilitation, including wearable exoskeleton robots, rehabilitation equipment, soft exoskeleton robots, and unpowered exoskeleton robots, and their control methods. Lastly, the future development and the challenges in this field are discussed.
1. Introduction
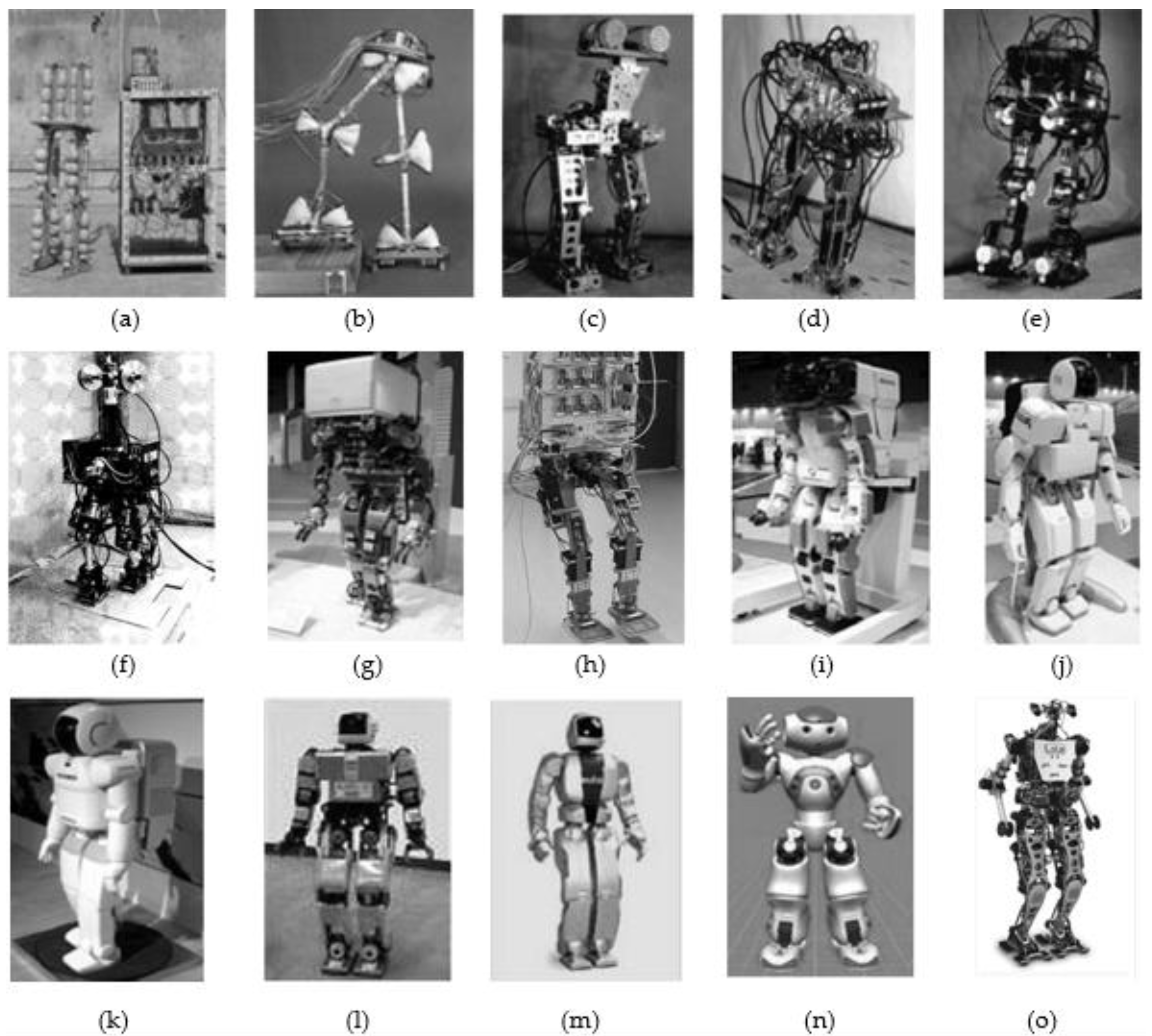
Bipedal robots are robots with two legs; the main difference between them and other robots is their bipedal locomotion. The research on bipedal robots began in the 1960s. In 1968, Smo-Sher, who worked at General Motors in the U.S., developed a controlled bipedal walking robot named Rig [1]. This started the research on bipedal robots. From 1968 to 1969, Yugoslavia’s famous scientist Vukobratovic proposed an important theory on bipedal robots, the Zero Moment Point (ZMP) stability criteria [2]. Since then, scholars and research institutions in various countries have started research work on bipedal robots. The main development course of the bipedal robot is shown in Table 1 and Figure 1.
Japan has a prominent position in the field of bipedal robot research and has made many milestone achievements. In 1968, Professor Kato Ichiro of Waseda University first started the development of bipedal robots in Japan. From 1969 to 1984, Kato’s laboratory launched more than 10 bipedal robots. The walking speed of the robot has developed from WL-5 with 45 s per step, to WL-10RD with 1.3 s per step [36]. As a pioneer in bipedal robot research, Kato has made a significant contribution. Since 1986, Honda has launched seven E series robots, three P series robots, and an intelligent robot called ASIMO. Honda’s research work, especially the P-3 and ASIMO, pushed the development of bipedal robots to a new level, making the development, production, engineering, and marketing of biped robots practical. Japan has many other scientific research institutions engaged in bipedal robot development and theoretical research work, such as Matsushita Electric Works, Fujitsu, Farrah, and Hitachi. They have performed significant research on bipedal robots and have achieved some success.
In parallel with the Japanese developments, Mogeer put forward the “Passive Dynamic Waking” theory in 1989 [41,42]. This theory improved the system of bipedal robots. The next year, Zheng et al. proposed the use of neural networks to achieve stable dynamic walking and achieved their goal with the SD series bipedal robots [43,44]. This was the first time intelligent algorithms were integrated with gait planning. In 1997, Pratt and Pratt et al. of the Massachusetts Institute of Technology proposed a virtual model control (VMC) strategy in the research of the bipedal robot Spring Flamingo [45]. The use of VMC effectively avoided the cumbersome robot dynamics and inverse kinematics calculations. This was helpful for the research of bipedal robots. In 2005, the University of Florida developed a bipedal walking robot, Rabbit, to show the world its running ability [46]. The walking ability of bipedal robots was again improved.
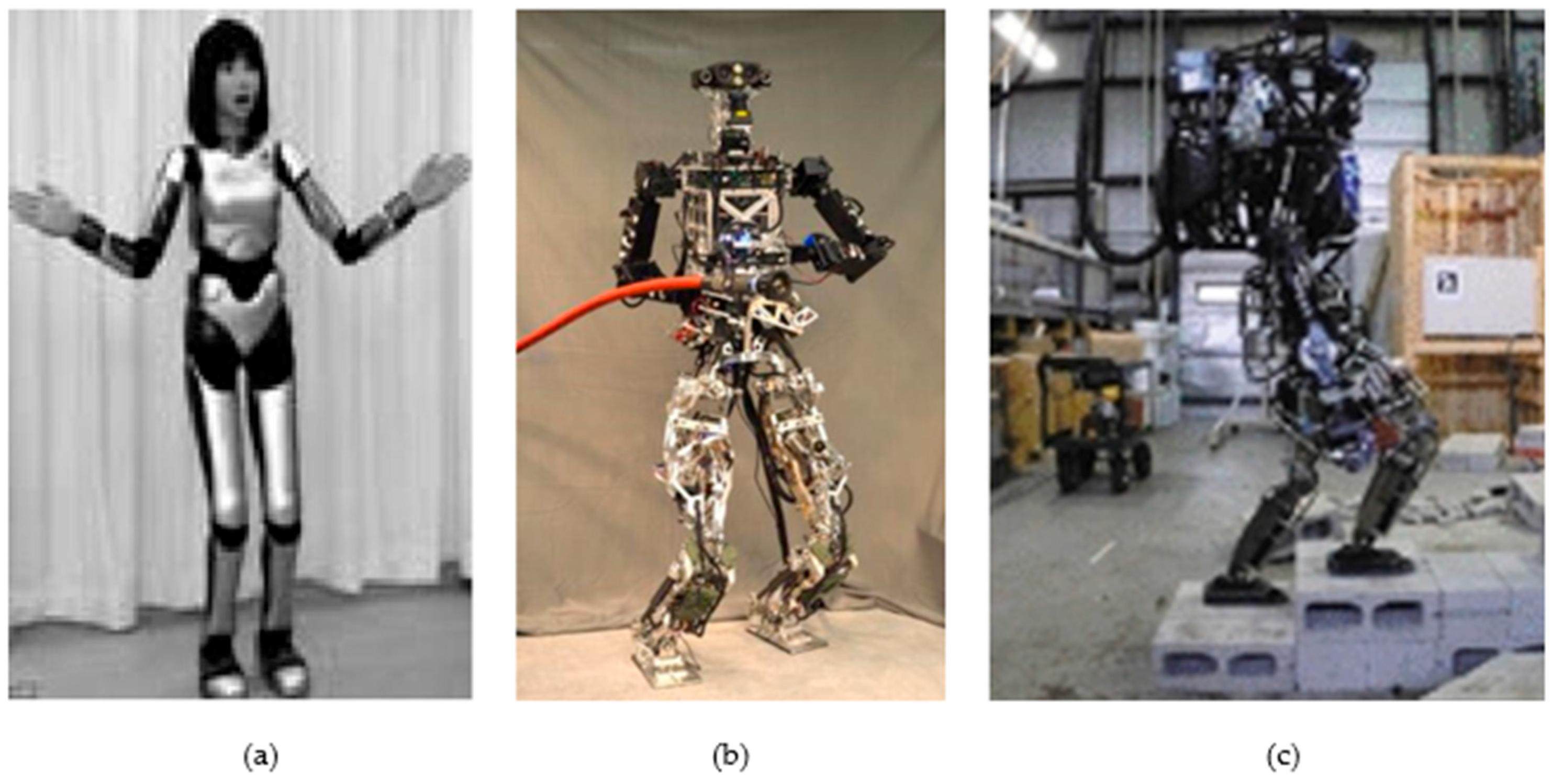
At present, the research and development of bipedal robots are mainly concentrated in Japan, the U.S., China, South Korea, and France. However, the focus of each country’s research is different. Japanese bipedal robots are biased toward simulating human movements and living characteristics. European countries developed bipedal robots biased toward medical services, and the American research bipedal robot has focused on military applications. Over the past decade, new bipedal robot products were being constantly developed. In 2010, Japan’s Advanced Industrial Science and Technology (AIST) released an entertaining bipedal robot HRP-4C [20]. Although HRP-4C is an entertainment robot meant for singing and dancing, it is technologically advanced. PETMAN robots were developed by Boston Dynamics in 2013 [47], a lifelike humanoid robot mainly used to test protective clothing. Surena III was the latest generation of bipedal robots launched by Tehran University in 2015 [24]. Its body can move backward while standing on one foot. In 2016, Boston Dynamics showcased Atlas, developed for the U.S. military [25]. Atlas can not only walk like a human body with its legs, but can also adapt to a variety of outdoor terrain. These bipedal robots, as shown in Figure 2, represent the top level of bipedal robot development. The theory of bipedal locomotion has basically matured, although room for improvement exists in stability. The researchers should allow the bipedal robot to identify the external environment information, so that it knows how and where to go. The implementing agency, cooperating with the bipedal locomotion, needs to be improved and perfected. Once this is attained, bipedal robots will be able to complete more tasks.
Conversely, the movement of bipedal robots is similar to that of humans, and many bipedal robot technologies can be applied to rehabilitation, such as structural design, stability control, and gait planning. So, the development of bipedal robots will promote the development of rehabilitation, and rehabilitation will become one of the important applications of bipedal robots.
2. Bipedal Locomotion
2.1. Hardware and Structure
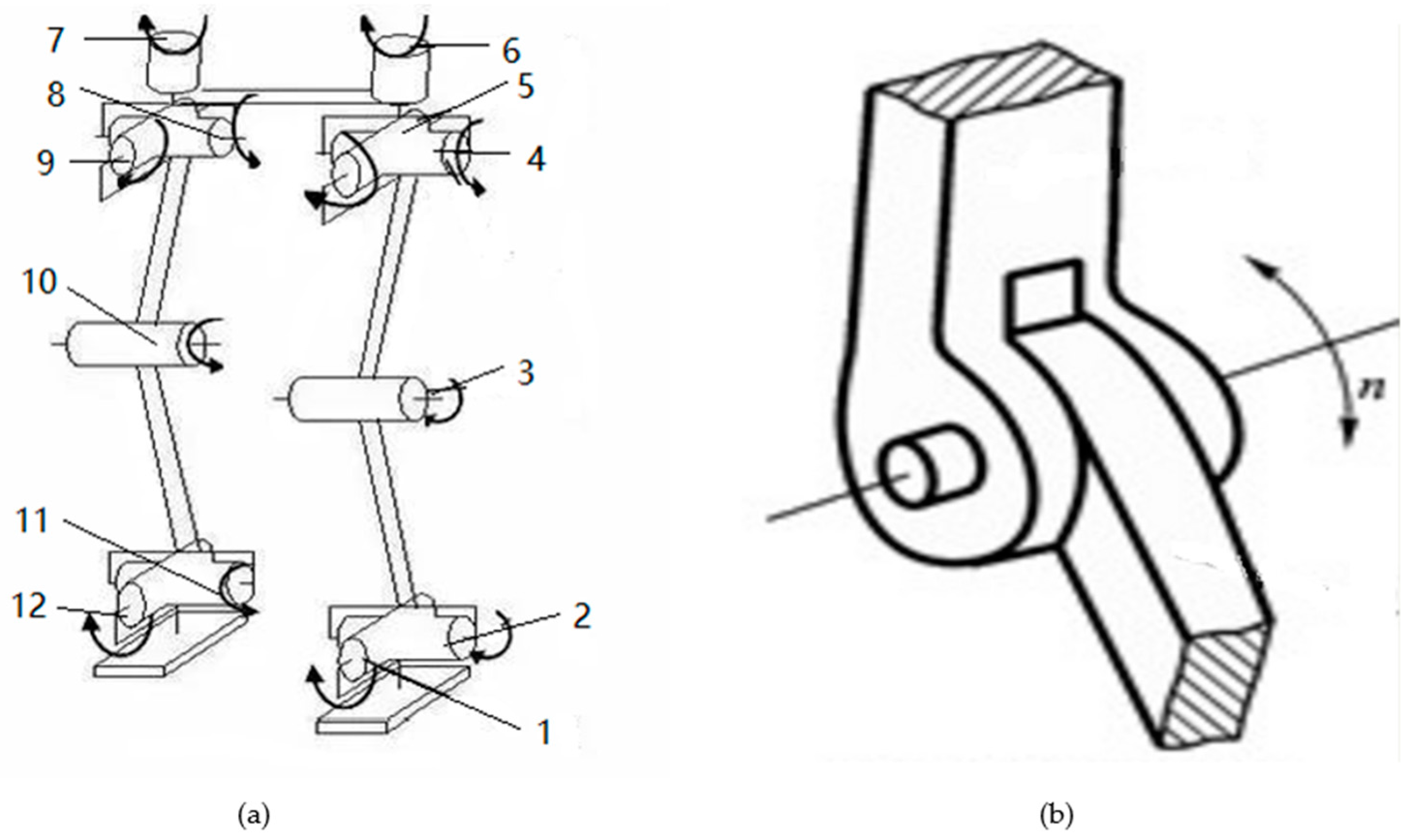
The bipedal locomotion of the robot imitates human walking, so the robot also mimics the human leg in the design of the mechanical structure, including the hip, knee, and ankle [50]. Figure 3a shows the classic lower limb structure with 12 degrees of freedom, where each leg has 6 degrees of freedom. Usually, the rotation pair (Figure 3b) will be used to simulate the joints of the human leg. The actuator is used instead of the muscle to drive the various joints. Currently, widely-used drives include motors, hydraulic pumps, and pneumatic muscles. A large number of sensors installed on the robot are equivalent to the human senses used to obtain their own state of motion and external environment information, for example, torque sensors, angle sensors, and contact switches [51]. This provides the basis for the control of the bipedal locomotion. This hardware provides the possibility for the bipedal robot to walk on the flat, slopes, or even up the stairs like a human. The imitation of human lower limb structure laid the foundation for the application of bipedal robot in rehabilitation.
2.2. Stability Control
Stability control is an important part of bipedal locomotion. When people walk on uneven surfaces or are disturbed, the upper limbs and lower limbs ware adjusted accordingly to maintain body balance. Due to the role of inertia, the robot’s state is very unstable when it is influenced by outside interference. To allow bipedal robots to be as stable and balanced as humans, researchers created stability control based on sensory reflexes, including the zero moment point (ZMP) reflex, the landing-phase reflex, and the body-posture reflex [52]. The three sensory re-flexes are independent and work when their conditions are satisfied.
• ZMP Reflex
ZMP is an abbreviation for zero moment point. ZMP reflex does not work when ZMP is in a stable area. The ZMP reflex will not be active until ZMP is at a stable area boundary and exceeds the stability range. By changing the corner of the ankle joint, the ZMP can be returned to the stable range. Therefore, the use of ZMP reflex can ensure that ZMP is always in a stable area during walking. The angle of the supporting ankle can be calculated by Equations (1) and (2) [53]:
where is the sampling period, and is current time. is the distance between the actual ZMP position and the expected stable area boundary. and are coefficients. is the force between the supporting foot and the ground.
• Landing-Phase Reflex
When the ground level is uneven, the contact time between the foot and the ground will be corresponding in advance or delay. If the gait is not corrected in time, the robot is likely to fall. Landing-phase reflex can effectively solve this problem. Landing-phase reflex will increase the height of the leg lift when the contact time between the foot and the ground is advanced. The increase in the height of the leg lift can be calculated according to the Formulas (3) and (4) [53]:
Similarly, when the contact time between the foot and the ground is delayed, the height of leg lift will be reduced accordingly, as per Equations (5) and (6) [53]:
where , are coefficients, and is estimated body weight of robot. h is a constant variable. is the force between the supporting foot and the ground. The change of foot height is achieved by controlling the hip and knee joints.
• Body Posture Reflex
Changes in body posture also affect bipedal locomotion. Reasonable body posture contributes to the stability of the system. When the robot is tilted due to outside interference, the body posture deviates from the expected target. The role of the body posture reflex is to change the hip to adjust the body posture. This ensures the body posture remains in a reasonable range. From the current actual posture to the target posture, the angle of the hip can be calculated from Equations (7) and (8) [53]:
where is the deviation between the actual body posture and the required body posture, and is the coefficient. is the force between the supporting foot and the ground.
• Intelligent Algorithm
The above control ideas build a reasonable research model and theoretical background for the actual control of the robot. On this basis, the correct introduction of an intelligent control algorithm will improve the applicability and robustness of the algorithm. The traditional intelligent control algorithms, such as connectionism, fuzzy logic, and genetic algorithms, have strong self-learning, adaptive, and fault-tolerant capabilities, and are gradually introduced into the control of each model. The author of the literature [54] is one of the most successful scholars who used the neural network to control the robot. Initially, they used supervised learning to train three CMAC neural networks for adaptive learning, and then used them to control the front to back balance, the left to right side pendulum, and the continuous changing pose. In addition, according to the needs of actual robot control, the combination of intelligent control algorithms, such as fuzzy neural network, neuron fuzzy logic, and neuron genetic algorithm, is also appearing in the control of biped robots [55].
• Torque Control
The torque-controlled robot has been proposed as a new concept. This method is based on the force balance at the joints. Generally, a torque sensor is installed at the joints of the robot. The motion of the robot can be obtained by processing the sensor data, and the location and size of the external force can be calculated. On this basis, the robot can achieve touch stop, drag teaching, impedance control, and other functions using a reasonable force control algorithm. Unlike position-controlled robots, this flexibility allows a greater degree of safety when interacting with people, as well as greater robustness in contact with the environment. In 2013, DLR introduced a torque-controlled humanoid robot TORO. TORO is a research platform for scientific topics addressing bipedal movement and dynamics [56], which will promote the development and popularization of torque-control methods. As torque-control has a unique advantage, it will attract more attention in the future.
2.3. Motion Planning
Like humans, the bipedal robot walks by alternating legs. To achieve a stable walk, a reasonable gait must be planned. The quality of the gait will directly affect the stability of walking, the size of the driving torque, and aesthetics. Similarly, in the application of rehabilitation robots, motion planning is also needed for coordination with the movement of people. At present, five kinds of gait planning methods exist.
• Gait Planning Based on Bionic Kinematics
The purpose of bipedal locomotion is to imitate human walking characteristics, so gait planning can learn from the human bionic gait. Human motion capture data (HMCD) [57,58] can plan complex and diverse actions. As the reference action is generated by the human body, the planning method becomes simpler. Honda’s research team generated ASIMO’s gait based on the analysis of the mutual restraint and coordination between the joints of human lower limbs. However, the feasibility of the method entirely depends on the walking data, and accurately and completely measuring or recording the characteristics of human walking data is difficult with the existing instrument. So obtaining gait data for robots is challenging.
• Gait Planning Based on Stability
The study of human dynamic walking shows that the balance of human walking is not due to the relatively large soles of the feet, but the complex coordination of the body. To achieve a stable gait, a large number of research scholars have proposed stabilization criteria for different models, such as center of pressure criterion (CoP) [59], foot rotation indicator (FRI) [60], and zero moment point (ZMP) criterion. Among them, the ZMP stability criterion proposed by Vukobratovic is one of the most widely used. Honda’s ASIMO used the ZMP theory to achieve walking and balance of bipedal robots.
• Model-Based Gait Planning
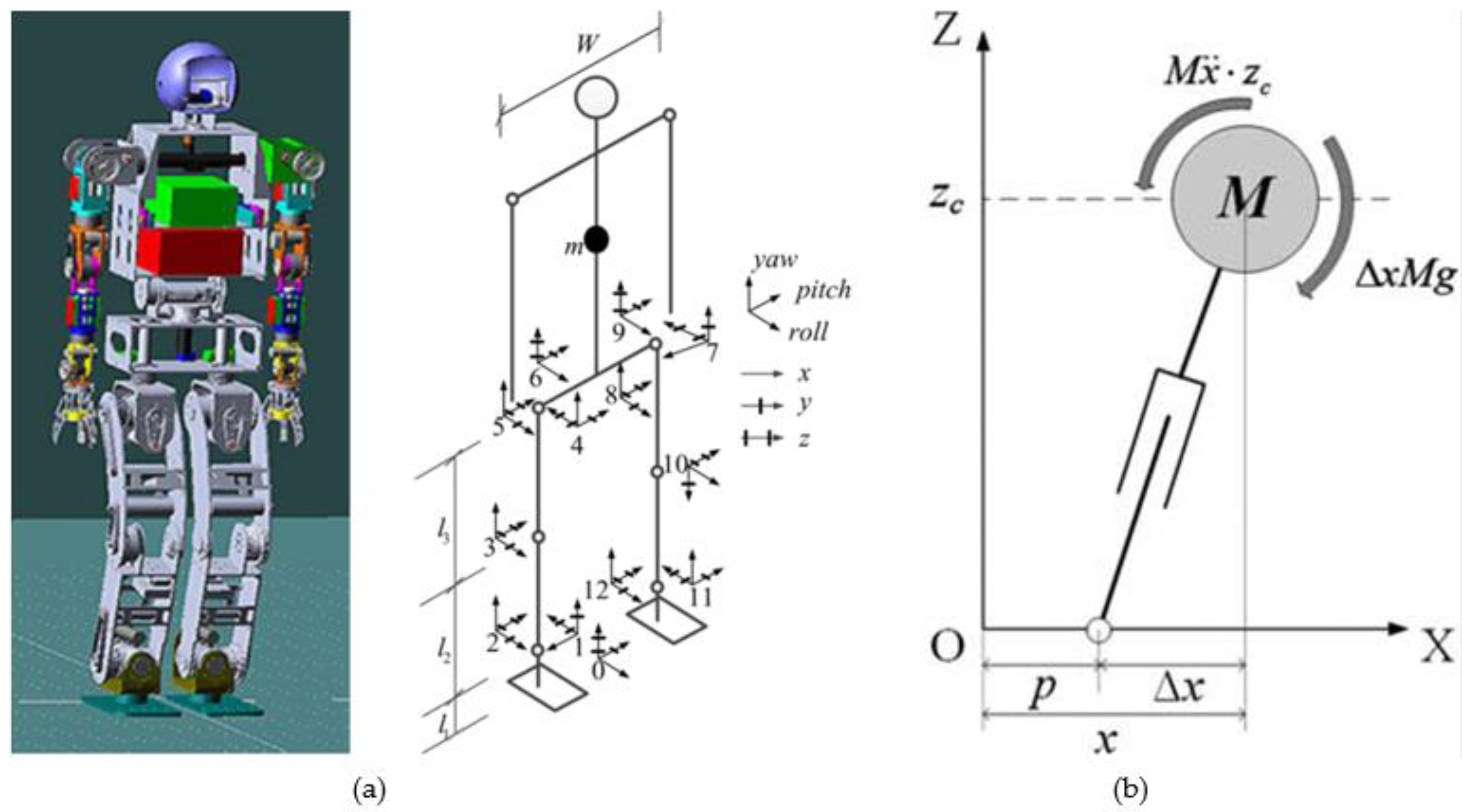
The model-based gait planning method mainly includes the multi-link model (Figure 4a) and the inverted pendulum model (Figure 4b) [61,62]. The gait planning of the multi-link model has been successfully applied to the Honda robot. This gait planning method is based on the ideal model while ignoring the radial and lateral motion of the coupling. Therefore, when the planned gait is applied to the actual prototype, an unavoidable error occurs. However, this is one of the most widely used methods. The adaptability of the data to the actual environment, and the robustness to the interference, need to be improved in the future.
• Gait Planning Based on Energy Consumption Optimization
People walk with the lowest energy consumption and remain stable as result of the evolutionary process. Therefore, planning a gait with the energy-optimized method can make bipedal locomotion more human. Vukboratovic first analyzed the torque required to achieve the joint movements from the energy point of view [65]. Capi generates the walking gait of the biped robot Bonten-Maru for the optimization target with the lowest energy and the minimum variation in joint torque [66]. The energy optimization method can fully develop the performance of bipedal robots and reduce the system requirements. However, the calculation of the optimal planning is complex and cannot be implemented in real time.
• Gait Planning Based on Intelligent Algorithm
Intelligent techniques, such as neural networks, fuzzy logic, and genetic algorithms, have powerful self-learning, adaptive, and fault-tolerant capabilities that have attracted many robotics researchers to apply them to gait planning. In 1992, each joint of robot SD-2 was represented by a joint neuron [67]. In the study, the neural network obtained the relationship between the foot force and the angle of the corresponding joint angle adjustment. In addition to the neural network, due to the advantages of fuzzy logic in terms of knowledge expression, many scholars apply it to the generation and control of the biped gait. The literature [68] uses a fuzzy gait parameter adjustment algorithm to dynamically control the gait parameters, including the step size and rotation speed. In the literature [69], the concept of fuzzy logic has been combined with Linear Quadratic Regulator (LQR) controller theory to design the best method to allow the biped robot system to have a balanced and stable gait. However, intelligent algorithms generally require a large number of training samples and long-term calculations, and the spatial structure and data convergence of the samples have not yet been fully solved. Much work remains to be done in applying the intelligent algorithm to gait planning.
3. Rehabilitation Application
The lower limbs of the human body are mainly responsible for standing, maintaining balance, and walking. The requirements of these functions are the same in bipedal robots. Conversely, bipedal robots are designed and controlled by the principle of realistically imitating people. As a result, bipedal robots and related technologies, such as stability control and motion planning, can be applied in human lower limb rehabilitation training and assisted walking. The application of bipedal robot technology to human lower limb rehabilitation training is limited. In 2000, with the support of the U.S. Defense Advanced Research Projects Agency, Berkeley’s Human Engineering Laboratory (HEL), SARCOS Robotics, Oak Ridge National Laboratory (ORNL), and Millennium Jet began research on bipedal exoskeleton robots. Most bipedal exoskeleton robots are still in the initial stages of development. However, the technical achievements on bipedal robots have contributed to the development of lower limb rehabilitation robots, particularly for gait planning, stability control, and sensor applications. Of course, a re-examination of the theoretical approach helps to improve the robots.
However, bipedal robots and rehabilitation robots cannot be equated. For rehabilitation robots, humans can act as a link in control, whereas the existing bipedal robot technology often does not consider this aspect. Therefore, developing and improving the control scheme from the unique perspective of the rehabilitation robot is necessary. Overall, the bipedal robot technology has a large volume of reference material for lower limb rehabilitation robots. Regardless of the type of lower limb rehabilitation robot, they all use bipedal robot control theory, especially for stability control and gait planning. Four common types of lower limb rehabilitation robots exist.
• Wearable Exoskeleton Robot
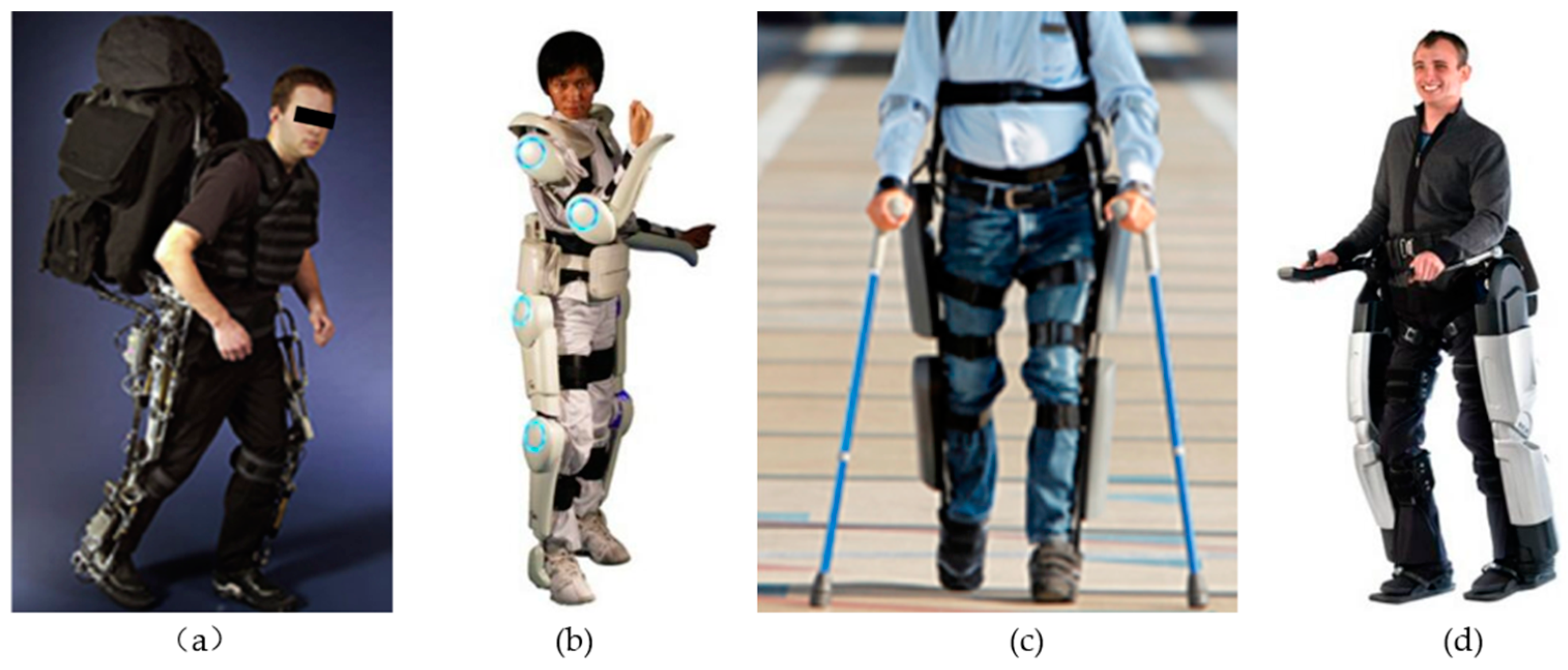
The wearable exoskeleton robot is one of the earliest proposed robots to assist with walking. Its biggest feature is that it allows the user’s range of activities to be less restrictive. It can be used to assist patients with hemiplegia to walk, and to improve the body’s normal function. This field has the highest number of researchers. The Berkeley lower extremity exoskeleton (BLEEX) (Figure 5a), developed by the University of California at Berkeley and the Ergonomics Laboratory, already has two versions [70]. The mechanical system of the bipedal exoskeleton robot was designed according to the biological characteristics of the normal adult man. A plurality of sensors and actuators mounted on the exoskeleton legs provide the necessary control information to the control center. The computer accepts this information while detecting the user’s real-time status. By adjusting the drive torque to assist joints, people can walk long distances while carrying external load. Experiments show that when the load on BLEEX-1 is 34 kg, walking speed can reach 1.3 m/s. However, the human body feels only 2 kg of the external weight. When the load on BLEEX-2 is up to 45 kg, walking speed can be increased to 2 m/s. Cyberdyne HAL [71] (Figure 5b), Israel ReWalk (Figure 5c), and Rex Bionics’ Rex (Figure 5d) are all wearable exoskeletons. Due to the complexity of the mechanical structure and the energy consumption of the equipment, the current wearable exoskeleton robot efficiency is low.
• Rehabilitation Equipment
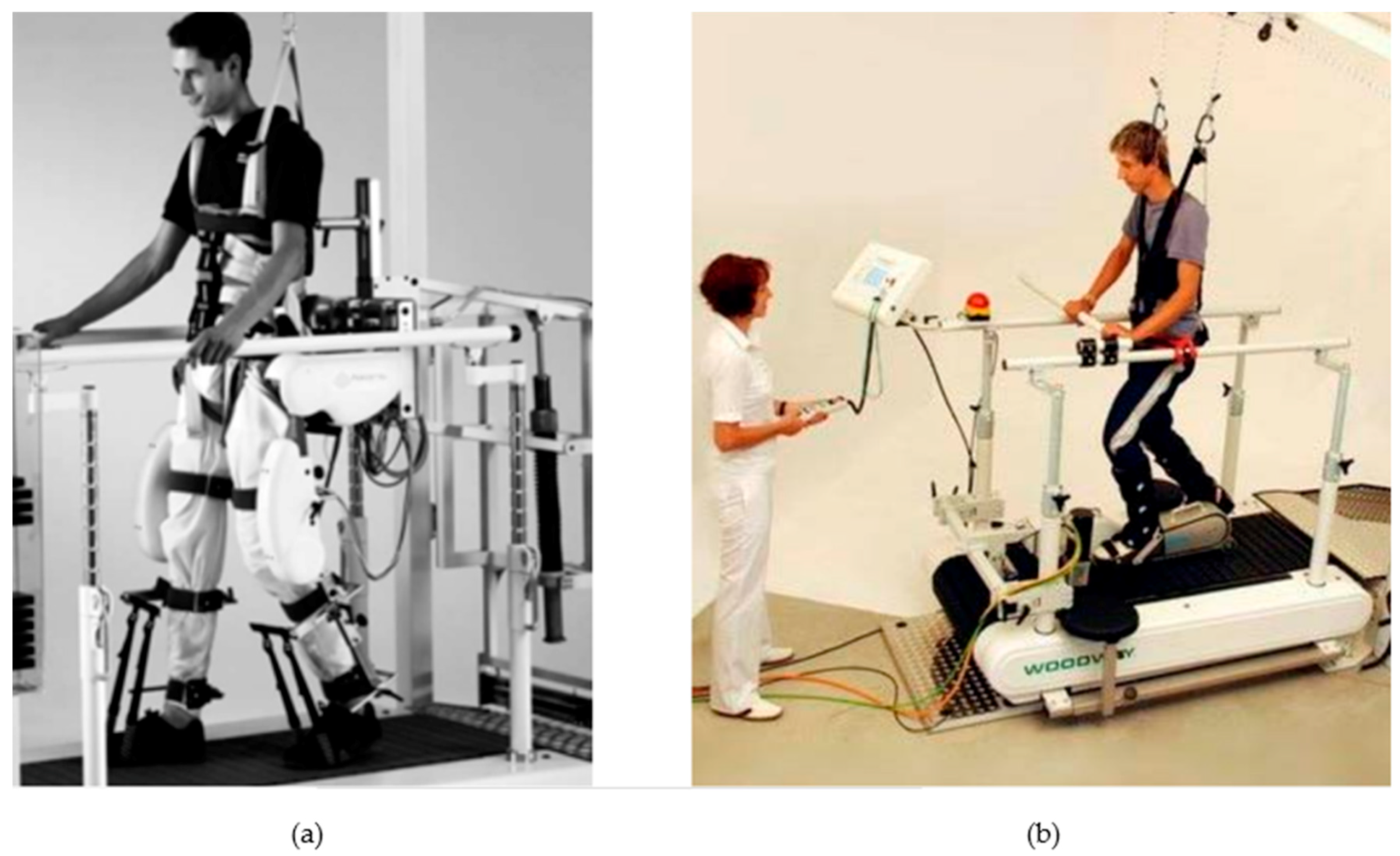
Rehabilitation equipment also uses bipedal robot technology. Unlike the wearable exoskeleton robot, rehabilitation equipment is generally larger and heavier in quality. Rehabilitation equipment usually requires more sensors to obtain human motion data, and have specialized data processing equipment. Although rehabilitation robots can provide better service as well as a rehabilitation effect, they are expensive and cumbersome. So, rehabilitation robots can only exist in hospitals or large rehabilitation centers. Toyota demonstrated the rehabilitation equipment Welwalk-1000 in 2017 and will lease the rehabilitation system to various medical institutions by the end of the year [74]. The patient’s thighs, knees, ankles, and feet are fixed to the equipment and then the patient walks on a treadmill. In the course of walking, the internal sensor detects the action and continually adjusts the robot. This system contributes to the recovery of patients with slow progress, and training can accelerate rehabilitation. Simultaneously, the system helps the therapist to monitor the patient’s progress and better grasp the patient’s condition. LOKOMAT (Figure 6a) and LokoHelp (Figure 6b) have a function similar to Welwalk-1000. Being bulky and hard to carry are their common shortcomings.
• Other Emerging Exoskeleton Robots
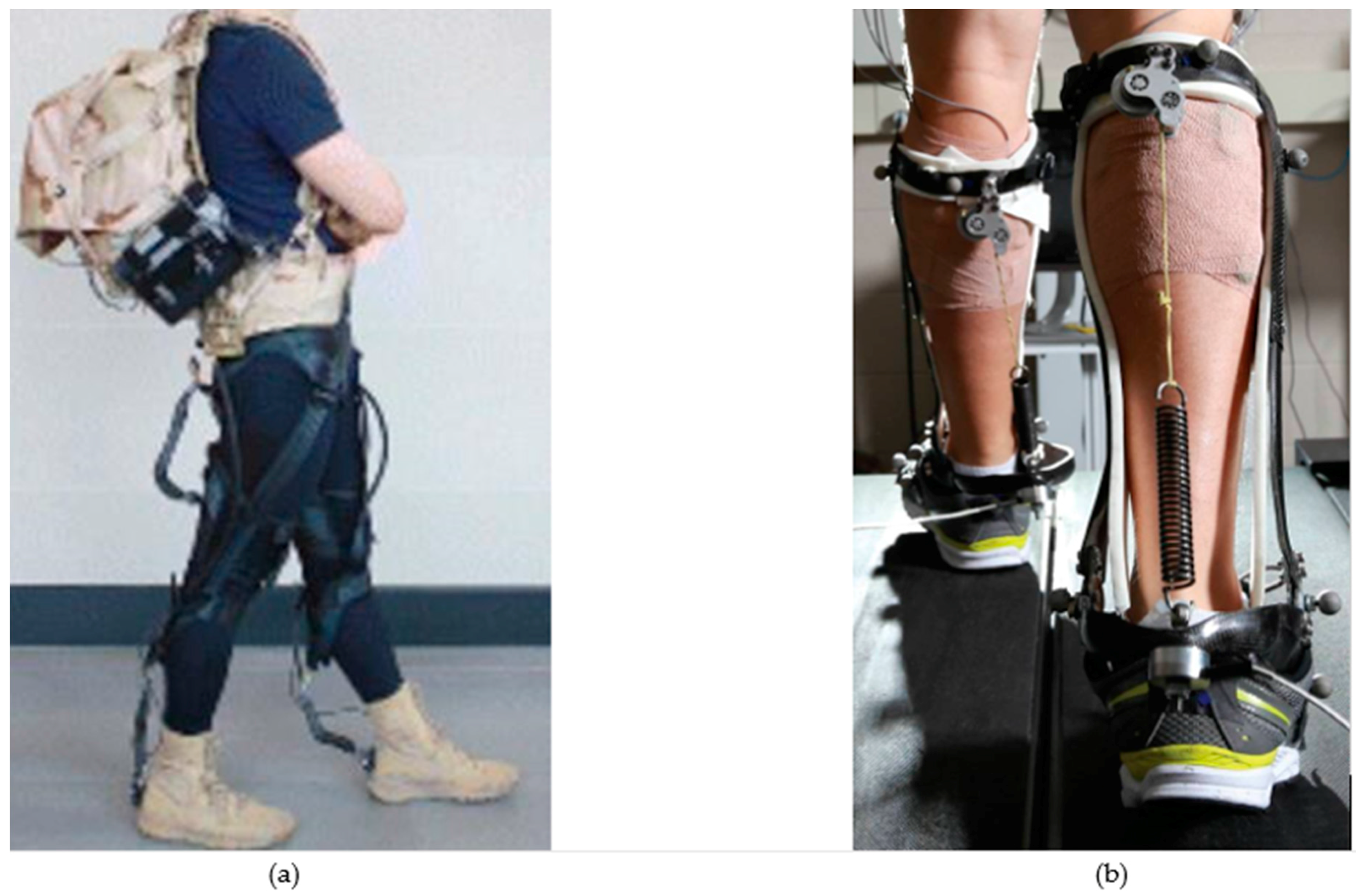
To minimize the burden on the human body due to the weight of the lower limb auxiliaries, exoskeleton robots with soft structures have been proposed by researchers. The advantages of the soft material include the weight and the ability to overcome the constraints of a rigid structure. The soft exoskeleton can better adapt to the deformation of the human body during walking. However, how to effectively drive a soft material and pass the force on to the human body becomes a challenge. In 2013, Harvard University developed an exoskeleton robot Exosuit [76] (Figure 7a). The robot employs a flexible design that allows the wearer to remove the constraints of the rigid material and move more naturally. In realizing the assistive walk function, the robot weighs only 7.5 kg. The video of the stroke on the treadmill proves that it can improve a person’s ability to walk. When the soft exoskeleton is worn, the patients no longer need crutches, and their footsteps become faster and more confident.
The unpowered exoskeleton robot is a new concept. Similar to passive walking in bipedal robots, robotic joints do not require a driver, using the body’s own gravity or spring potential to assist people to walk. Although the principle of the unpowered exoskeleton robot is simple and does not require a control system, the design must consider the constraint of the degree of freedom, gait planning, and force analysis. Researchers from Carnegie Mellon University and the University of North Carolina designed an unpowered exoskeleton system, Exoboot [77] (Figure 7b). This exoskeleton system uses carbon fiber material, so it is very light at about 500 g. The use of springs to store energy reduces the energy consumed in walking by nearly 7%. Advanced exoskeleton robots have many advantages over traditional exoskeleton robots. However, the research on advanced exoskeleton robots has just started and remains a good research prospect. Table 2 summarizes and compares the characteristics of different exoskeleton robots.
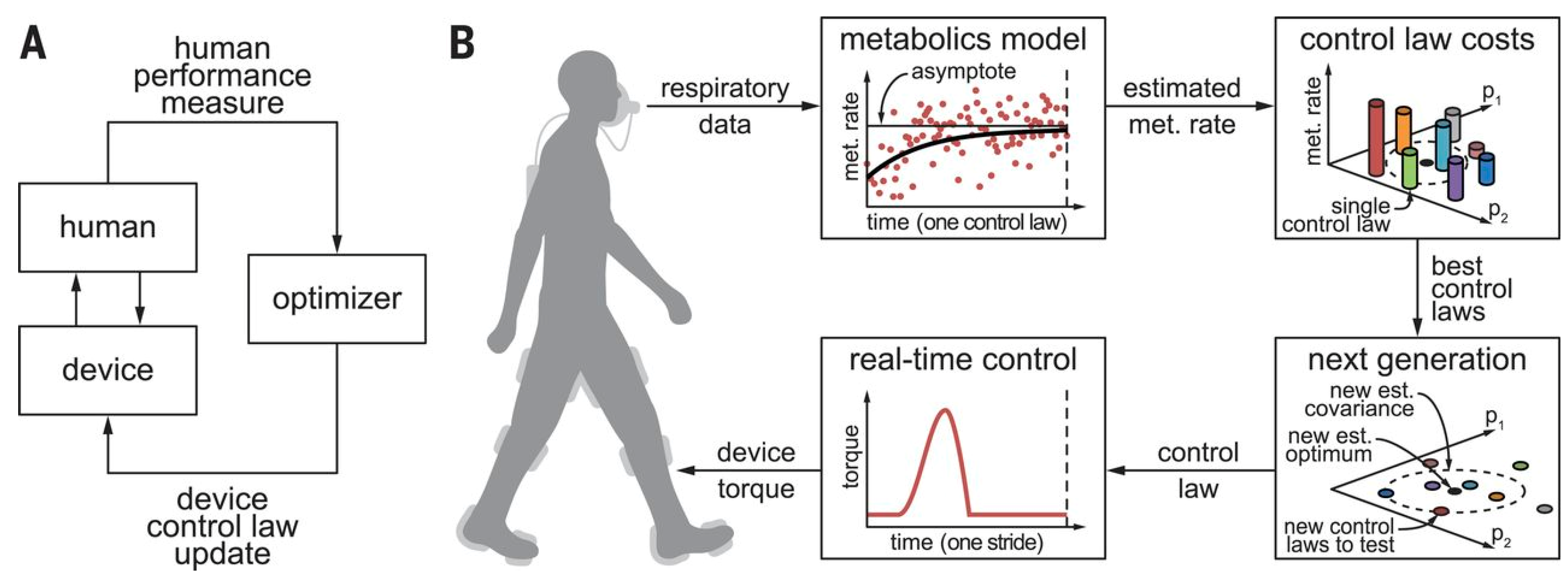
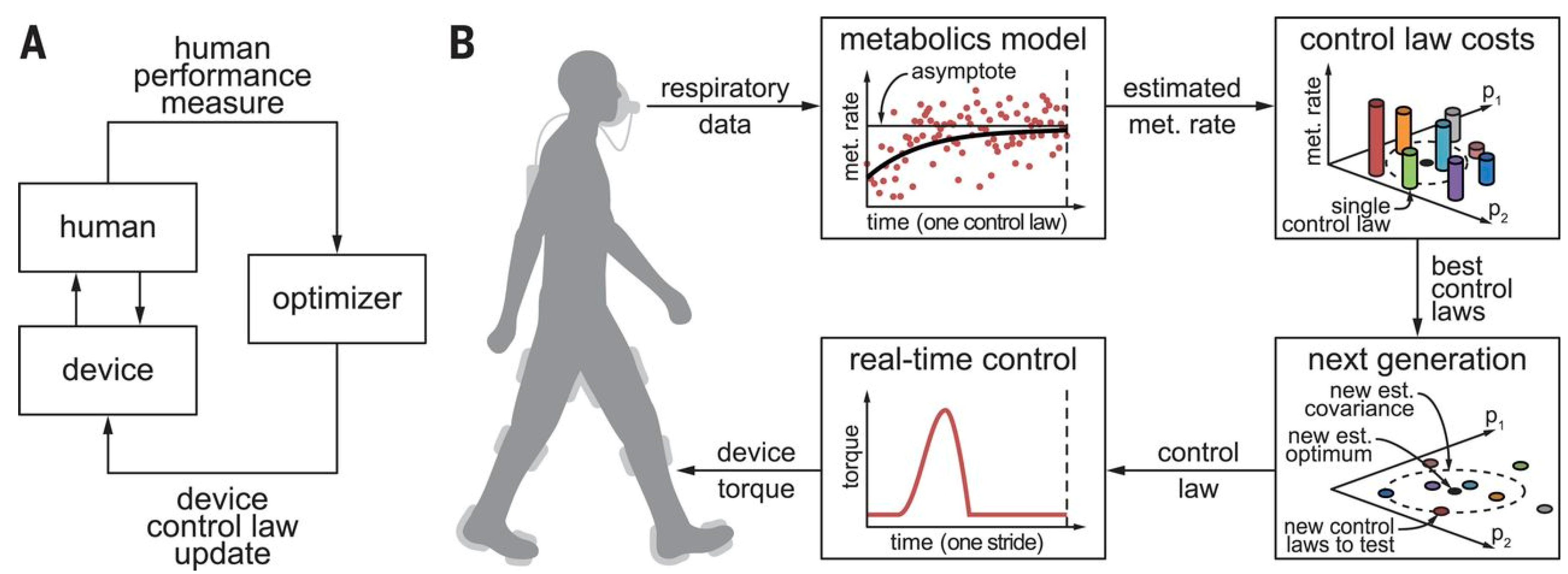
For bipedal robots, the gait planning based on bionic kinematics requires the collection of human motion data. Since the assistance of exoskeleton robots is based on the accurate acquisition of human motion intent, these signal acquisition techniques can be applied to the control of exoskeleton robots. The current exoskeleton robot control methods are: manipulator control, force feedback control, EMG signal control, pre-programmed control, master-slave control, ZMP control, and sensitivity amplification control. The hybrid auxiliary limb (HAL) [71] (Figure 5b), developed by Japanese robot manufacturer Cyberdyne, is controlled based on the EMG signal. HAL is also the world’s first bipedal skeleton robot that can be controlled by human minds. In 2013, the HAL bipedal exoskeleton robot received global safety certification in Japan. Obtaining a Global Certification means that HAL will be delivered to the market worldwide, which is good news for people with disabilities. ReWalk [79] (Figure 5c), designed and manufactured by Israel ReWalk, is adaptive, unlike other common exoskeletons or prostheses. It self-learns and walks at the habitual pace of the user with an intelligent control method. In 2017, Zhang proposed using the person as a part of the control of the exoskeleton robot by measuring the body’s metabolism of the gas to obtain the real-time state of the human body [80]. Based on this, the control of exoskeleton robots was optimized. Figure 8 shows the operating principle of the entire system. This theory has raised the l man-machine cooperation of exoskeleton robots to a new level.
The number of elderly people suffering from hemiplegia or paraplegia for whom walking is an inconvenience or impossibility is huge, and this number continues to rise. With an aging society, the number of elderly people will increase sharply in the future, and the number of elderly people incapacitated will inevitably increase. With the increase of these social needs, rehabilitation will become one of the important applications of the bipedal robot.
4. Challenges and Outlooks
The application of bipedal robots to rehabilitation has become a research hotspot, and its application prospects are very broad. However, there is still a long way to go for the commercialization of the rehabilitation equipment. First, the rehabilitation effect of the equipment is the aspect that people most concerned. Although rehabilitation equipment can significantly reduce the workload of physical therapist and contribute to the popularity of rehabilitation training, the rehabilitation effect of equipment has not yet reached the level of physical therapist. Practicality is also one of the factors that rehabilitation equipment needs to consider. The structure of traditional rigid rehabilitation equipment is too complex and cumbersome, which is not only detrimental to wear but also not conducive to the late maintenance and repair. The new soft rehabilitation robot greatly simplifies the structure and weight of the equipment, but the auxiliary force is also reduced. The commercialization of rehabilitation equipment must take the cost into account. At present, the price of rehabilitation robot, such as HAL and ReWalk, is very high. This is not all patients can afford. In order to achieve commercialization in the future, the cost of rehabilitation equipment must be well controlled. Comprehensive research status, there are still many challenges in theoretical and technical aspects:
• Mechanical Structure
The rehabilitation robot is a complex system with multiple joints and redundant degrees of freedom. The complex and heavy structure is presently one of the important factors limiting the development of the rehabilitation robot. A fully functional intelligent rehabilitation robot must have a compact and disposable mechanical body. How to achieve the desired function and optimize the structure is worth exploring. The use of advanced materials, such as carbon fiber and titanium alloy, is the usual method used to reduce the weight. However, the types of advanced materials are limited and the cost is usually high, resulting in it being difficult to meet the demand. However, with the progress in processing and manufacturing, integration and modular design will be the development trend in the future. In general, the mechanical structure should be designed to meet people’s requirements for flexibility, stability, and comfort.
• Kinematics and Dynamics
The control of the rehabilitation robot is performed based on kinematics and dynamics. The accuracy of the model determines the final control effect. Due to the high order, strong coupling, and non-linearity of the rehabilitation robot system, completely solving the kinematics and dynamics is difficult. Some scholars have introduced methods such as neural networks, genetic algorithms, fuzzy logic, chaos theory, and other methods. However, these methods are not yet mature and have their own advantages and disadvantages. With the introduction of new theoretical methods and the continuous improvement of computer performance, better solutions should be presented. In the future, accurate kinematics and dynamics simulation on a computer will be possible.
• New Drives
The drive is an important part of a rehabilitation robot. As performance requirements for rehabilitation equipment become increasingly higher, the drive requirements are following suit. Rehabilitation equipment must provide power to help people walk. To provide sufficient power, the drive used by the robot is often cumbersome. This increases the weight of the equipment and wastes energy. The ideal drive must be lightweight, small, and provide enough drive torque, while having good heat dissipation. The development requirements of the robot are not being met by the traditional drive method, so people are attempting to find new drives. Shape memory alloy drive and piezoelectric ceramic drive are being gradually applied to the field of robots. These drives are faster and more capable of load, making them good prospects for the field of rehabilitation robots.
• Energy Resources
Most rehabilitation robots are mainly powered by batteries, and the range of movement is limited by the capacity and efficiency of the battery. The ideal energy source should have a very high energy density, high-temperature resistance, corrosion resistance, be renewable, and inexpensive. Therefore, improving the drive source to make it small, lightweight, and have a large capacity is a problem that must be solved in the development of bipedal robots. Researchers in the future can seek new energy technologies, including solar energy and bioenergy, to address the energy development bottleneck. With the development of nanotechnology, high-density batteries are expected to solve the energy problem, such as with graphene batteries. Wireless charging is also a means of solving the energy problem with rehabilitation robots. However, the current wireless charging technology is not mature enough and cannot achieve long-distance transmission.
• Sensing Technology
To accurately obtain the user’s motion information, many sensors, such as force sensors, torque sensors, gyroscopes, vision sensors, and acoustic sensors, are installed in bipedal robots. The control of the robot is sensor-based. However, the sensor accuracy can be improved and the cost can be decreased. Additionally, the traditional rigid sensors tend to be relatively large and limit the movement of the human body. Many new types of sensors based on soft material have been presented, which are well-suited to human body detection. A soft structure not only fits the surface of the human body, but is also more comfortable for the user. A micro-sensor is a new type of sensor based on semiconductor technology. Micro-sensors are increasingly popular because of their miniaturization, intelligence, low power, and high integration. Although these new sensors are still facing problems in manufacturing, sensitivity, and stability, they have potential for robot sensing, especially for application in rehabilitation.
• Human-Robot Co-Fusion
In the traditional training process, rehabilitation is the interaction between a patient and a physical therapist. When using robots, the ideal robot should have the same or similar ability as physical therapists in terms of being able to detect the rehabilitation condition of the patient, design a personalized training plan, and dynamically optimize the training process. However, current robotic systems are still in a very early stage. The systems can perform some basic tasks through programming, but the results are far from intelligent. A new concept called “human-in-the-loop” has been proposed by the research team at CMU, where the human and robot are integrated in a closed loop and the robot is able to adjust the working conditions according to the human’s walking condition. This type of human-robot co-fusion could be a trend for the development of rehabilitation robots.
5. Conclusions
Although the research on bipedal robots has had many achievements, many shortcomings in stability, man-machine coordination, and cooperation still exist, limiting the large scale entrance of the bipedal robot in our lives. The application of bipedal robots to rehabilitation places a higher requirement on the structure, control, stability, and human-computer interaction. With the development of biotechnology, electromechanical integration technology, and control technology, bipedal robot technology is also maturing. In the near future, bipedal robots might be better suited for application to rehabilitation and provide better service to people.
Acknowledgments
This work was partly supported by National Science Foundation of China (61773326), Shenzhen (China) Basic Research Project (JCYJ20160329150236426), ITF of Hong Kong (GHP/017/14SZ), and Hong Kong RGC General Research Fund (CityU 11278716).
Author Contributions
This review is drafted by X.Y., H.S. and H.L. Toshio Fukuda and Yajing Shen gave some advice and ideas about the organization of the article. X.Y. and H.S. contributed equally to this work.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Chen, B.; Luo, M.; Guo, F.; Chen, S. Walking mechanism and kinematic analysis of humanoid robot. In Proceedings of the 2013 International Conference on Advanced Mechatronic Systems (ICAMechS), Luoyang, China, 25–27 September 2013; pp. 491–494. [Google Scholar]
- Vukobratović, M.; Branislav, B. Zero-moment point—Thirty five years of its life. Int. J. Humanoid Robot. 2004, 1, 157–173. [Google Scholar] [CrossRef]
- Akhtaruzzaman, M.; Shafie, A.A. Evolution of humanoid robot and contribution of various countries in advancing the research and development of the platform. In Proceedings of the 2010 International Conference on Control Automation and Systems (ICCAS), Gyeonggi-do, Korea, 27–30 October 2010; pp. 1021–1028. [Google Scholar]
- Takanishi, A. Quasi dynamic walking of the biped walking robot. J. Robot. Soc. Jpn. 1983, 1, 196–203. [Google Scholar] [CrossRef]
- Lim, H.-O.; Atsuo, T. Biped walking robots created at Waseda University: WL and WABIAN family. Philos. Trans. R. Soc. Lond. A 2007, 365, 49–64. [Google Scholar] [CrossRef] [PubMed]
- Lim, P.; Al Kushi, A.; Gilks, B.; Wong, F.; Aquino-Parsons, C. Early stage uterine papillary serous carcinoma of the endometrium. Cancer 2001, 91, 752–757. [Google Scholar] [CrossRef]
- Kato, T.; Takanishi, A.; Jishikawa, H.; Kato, I. The realization of the quasi-dynamic walking by the biped walking machine. In Proceedings of the Fourth Symposium on Theory and Practice of Robots and Manipulators, Zaborów, Poland, 8–12 September 1981. [Google Scholar]
- Takanishi, A.; Naito, G.; Ishida, M.; Kato, I. Realization of plane walking by the biped walking robot WL-10R. In Theory and Practice of Robots and Manipulators; Springer: Colfax County, MX, USA, 1985; pp. 383–393. [Google Scholar]
- Kajita, S.; Kanehiro, F.; Kaneko, K.; Fujiwara, K.; Yokoi, K.; Hirukawa, H. A realtime pattern generator for biped walking. In Proceedings of the IEEE International Conference on Robotics and Automation, Washington, DC, USA, 11–15 May 2002; Volume 1, pp. 31–37. [Google Scholar]
- Zheng, Y.F.; Shen, J. Gait synthesis for the SD-2 biped robot to climb sloping surface. IEEE Trans. Robot. Autom. 1990, 6, 86–96. [Google Scholar] [CrossRef]
- Espiau, B.; Sardain, P. The anthropomorphic biped robot BIP2000. In Proceedings of the IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000; Volume 4, pp. 3996–4001. [Google Scholar]
- Hirai, K.; Hirose, M.; Haikawa, Y.; Takenaka, T. The development of Honda humanoid robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Leuven, Belgium, 16–20 May 1998; Volume 2, pp. 1321–1326. [Google Scholar]
- Pratt, J.E.; Pratt, G.A. Exploiting natural dynamics in the control of a planar bipedal walking robot. In Proceedings of the Annual Allerton Conference on Communication Control and Computing, Monticello, IL, USA, 23–25 September 1998; Volume 36, pp. 739–748. [Google Scholar]
- Sakagami, Y.; Watanabe, R.; Aoyama, C.; Matsunaga, S.; Higaki, N.; Fujimura, K. The intelligent ASIMO: System overview and integration. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002; Volume 3. [Google Scholar]
- Kuroki, Y.; Fujita, M.; Ishida, T.; Nagasaka, K.I.; Yamaguchi, J.I. A small biped entertainment robot exploring attractive applications. In Proceedings of the IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; Volume 1, pp. 471–476. [Google Scholar]
- Huang, Q.; Li, K.; Wang, T. Control and mechanical design of humanoid robot BHR-01. In Proceedings of the 3rd IARP International Workshop on Humanoid and Human Friendly Robotics, Tsukuba, Japan, 11–12 December 2002; pp. 10–13. [Google Scholar]
- Akachi, K.; Kaneko, K.; Kanehira, N.; Ota, S.; Miyamori, G.; Hirata, M.; Kanehiro, F. Development of humanoid robot HRP-3P. In Proceedings of the 5th IEEE-RAS International Conference on Humanoid Robots, Tsukuba, Japan, 5–7 December 2005; pp. 50–55. [Google Scholar]
- Park, I.W.; Kim, J.Y.; Lee, J.; Oh, J.H. Online free walking trajectory generation for biped humanoid robot KHR-3 (HUBO). In Proceedings of the IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 1231–1236. [Google Scholar]
- Lohmeier, S.; Buschmann, T.; Ulbrich, H. Humanoid robot LOLA. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 775–780. [Google Scholar]
- Kaneko, K.; Kanehiro, F.; Morisawa, M.; Miura, K.; Nakaoka, S.I.; Kajita, S. Cybernetic human HRP-4C. In Proceedings of the 9th IEEE-RAS International Conference on Humanoid Robots, Paris, France, 7–10 December 2009; pp. 7–14. [Google Scholar]
- Kaneko, K.; Kanehiro, F.; Morisawa, M.; Akachi, K.; Miyamori, G.; Hayashi, A.; Kanehira, N. Humanoid robot hrp-4-humanoid robotics platform with lightweight and slim body. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, 25–30 September 2011. [Google Scholar]
- Henze, B.; Werner, A.; Roa, M.A.; Garofalo, G.; Englsberger, J.; Ott, C. Control applications of TORO—A torque controlled humanoid robot. In Proceedings of the 14th IEEE-RAS International Conference on Humanoid Robots (Humanoids), Madrid, Spain, 18–20 November 2014; p. 841. [Google Scholar]
- Edwards, L. PETMAN Robot to Closely Simulate Soldiers; Technical Report; PhysOrg: Douglas, UK, 2010. [Google Scholar]
- Sadedel, M.; Yousefi-koma, A.; Khadiv, M. Offline path planning, dynamic modeling and gait optimization of a 2D humanoid robot. In Proceedings of the Second RSI/ISM International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 15–17 October 2014; pp. 131–136. [Google Scholar]
- De Santis, A.; Siciliano, B.; De Luca, A.; Bicchi, A. An atlas of physical human–robot interaction. Mech. Mach. Theory 2008, 43, 253–270. [Google Scholar] [CrossRef]
- Azevedo, C. Control architecture and algorithms of the anthropomorphic biped robot BIP2000. In Proceedings of the International Conference on Climbing and Walking Robots, Madrid, Spain, 2–4 October 2000. [Google Scholar]
- Pratt, J.; Chew, C.M.; Torres, A.; Dilworth, P.; Pratt, G. Virtual model control: An intuitive approach for bipedal locomotion. Int. J. Robot. Res. 2001, 20, 129–143. [Google Scholar] [CrossRef]
- Chestnutt, J.; Lau, M.; Cheung, G.; Kuffner, J.; Hodgins, J.; Kanade, T. Footstep planning for the honda asimo humanoid. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 629–634. [Google Scholar]
- Kuroki, Y. A small biped entertainment robot. In Proceedings of the 2001 International Symposium on Micromechatronics and Human Science, Nagoya, Japan, 9–12 September 2001; pp. 3–4. [Google Scholar]
- Zhang, L.; Huang, Q.; Lu, Y.; Xiao, T.; Yang, J.; Keerio, M. A visual tele-operation system for the humanoid robot bhr-02. In Proceedings of the International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 1110–1114. [Google Scholar]
- Fujita, M.; Kuroki, Y.; Ishida, T.; Doi, T.T. A small humanoid robot sdr-4x for entertainment applications. In Proceedings of the International Conference on Advanced Intelligent Mechatronics, Kobe, Japan, 20–24 July 2003; Volume 2, pp. 938–943. [Google Scholar]
- Kim, J.Y.; Park, I.W.; Lee, J.; Kim, M.S.; Cho, B.K.; Oh, J.H. System design and dynamic walking of humanoid robot KHR-2. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 1431–1436. [Google Scholar]
- Park, I.W.; Kim, J.Y.; Lee, J.; Oh, J.H. Mechanical design of humanoid robot platform KHR-3 (KAIST humanoid robot 3: HUBO). In Proceedings of the 5th IEEE-RAS International Conference on Humanoid Robots, Tsukuba, Japan, 5–7 December 2005; pp. 321–326. [Google Scholar]
- Shamsuddin, S.; Ismail, L.I.; Yussof, H.; Zahari, N.I.; Bahari, S.; Hashim, H.; Jaffar, A. Humanoid robot NAO: Review of control and motion exploration. In Proceedings of the 2011 IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, 25–27 November 2011; pp. 511–516. [Google Scholar]
- SoftBank Robotics. Available online: https://www.ald.softbankrobotics.com/en/robots/romeo (accessed on 8 September 2017).
- Akhter, A.; Shafie, A.A. Advancement of android and contribution of various countries in the research and development of the humanoid platform. Int. J. Robot. Autom. 2010, 1, 43–57. [Google Scholar]
- Yamaguchi, J.I.; Takanishi, A. Development of a leg part of a humanoid robot—Development of a biped walking robot adapting to the humans' normal living floor. Auton. Robot. 1997, 4, 369–385. [Google Scholar] [CrossRef]
- Azevedo, C.; Poignet, P.; Espiau, B. Artificial locomotion control: From human to robots. Robot. Auton. Syst. 2004, 47, 203–223. [Google Scholar] [CrossRef]
- Kristiina, J.; Wilcock, G. Multimodal open-domain conversations with the Nao robot. In Natural Interaction with Robots, Knowbots and Smartphones; Springer: New York, NY, USA, 2014; pp. 213–224. [Google Scholar]
- Buschmann, T.; Favot, V.; Schwienbacher, M.; Ewald, A.; Ulbrich, H. Dynamics and control of the biped robot lola. In Multibody System Dynamics, Robotics and Control; Springer: Vienna, Austria, 2013; pp. 161–173. [Google Scholar]
- McGeer, T. Passive dynamic walking. Int. J. Robot. Res. 1990, 9, 62–82. [Google Scholar] [CrossRef]
- McGeer, T. Passive walking with knees. In Proceedings of the IEEE International Conference on Robotics and Automation, Detroit, MI, USA, 10–15 May 1990; pp. 1640–1645. [Google Scholar]
- Salatian, A.W.; Zheng, Y.F. Gait synthesis for a biped robot climbing sloping surfaces using neural networks. I. Static learning. In Proceedings of the IEEE International Conference on Robotics and Automation, Nice, France, 12–14 May 1992; pp. 2601–2606. [Google Scholar]
- Zheng, Y.F. A neural gait synthesizer for autonomous biped robots. In Proceedings of the IEEE International Workshop on Intelligent Robots and Systems, Towards a New Frontier of Applications, Ibaraki, Japan, 3–6 July 1990; pp. 601–608. [Google Scholar]
- Pratt, J.; Dilworth, P.; Pratt, G. Virtual model control of a bipedal walking robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Albuquerque, NM, USA, 20–25 April 1997; Volume 1, pp. 193–198. [Google Scholar]
- Kac, E. Telepresence & Bio Art: Networking Humans, Rabbits, & Robots; University of Michigan Press: Ann Arbor, MI, USA, 2005. [Google Scholar]
- Nelson, G.; Saunders, A.; Neville, N.; Swilling, B.; Bondaryk, J.; Billings, D.; Lee, C.; Playter, R.; Raibert, M. Petman: A humanoid robot for testing chemical protective clothing. J. Robot. Soc. Jpn. 2012, 30, 372–377. [Google Scholar] [CrossRef]
- Kim, J.H.; Lattimer, B.Y. Real-time probabilistic classification of fire and smoke using thermal imagery for intelligent firefighting robot. Fire Saf. J. 2015, 72, 40–49. [Google Scholar] [CrossRef]
- Kuindersma, S.; Deits, R.; Fallon, M.; Valenzuela, A.; Dai, H.; Permenter, F.; Koolen, T.; Marion, P.; Tedrake, R. Optimization-based locomotion planning, estimation, and control design for the atlas humanoid robot. Auton. Robots 2016, 40, 429–455. [Google Scholar] [CrossRef]
- Chen, C.Y.; Shih, B.Y.; Shih, C.H.; Wang, L.H. RETRACTED: Design, modeling and stability control for an actuated dynamic walking planar bipedal robot. J. Vib. Control 2013, 19, 376–384. [Google Scholar] [CrossRef]
- Ramezani, A.; Hurst, J.W.; Hamed, K.A.; Grizzle, J.W. Performance analysis and feedback control of ATRIAS, a three-dimensional bipedal robot. J. Dyn. Syst. Meas. Control 2014, 136, 021012. [Google Scholar] [CrossRef]
- Hong, Y.-D.; Kim, J.H. 3-D command state-based modifiable bipedal walking on uneven terrain. IEEE/ASME Trans. Mech. 2013, 18, 657–663. [Google Scholar] [CrossRef]
- Huang, Q.; Yoshihiko, N. Sensory reflex control for humanoid walking. IEEE Trans. Robot. 2005, 21, 977–984. [Google Scholar] [CrossRef]
- Miller, W.T. Real-time neural network control of a biped walking robot. IEEE Control Syst. 1994, 14, 41–48. [Google Scholar] [CrossRef]
- Kuindersma, S.; Deits, R.; Fallon, M.; Valenzuela, A.; Dai, H.; Permenter, F.; Tedrake, R. Optimization-based locomotion planning, estimation, and control design for the atlas humanoid robot. Auton. Robots 2016, 40, 429–455. [Google Scholar] [CrossRef]
- Englsberger, J.; Werner, A.; Ott, C.; Henze, B.; Roa, M.A.; Garofalo, G.; Albu-Schäffer, A. Overview of the torque-controlled humanoid robot TORO. In Proceedings of the 14th IEEE-RAS International Conference on Humanoid Robots (Humanoids), Madrid, Spain, 18–20 November 2014; pp. 916–923. [Google Scholar]
- Shotton, J.; Sharp, T.; Kipman, A.; Fitzgibbon, A.; Finocchio, M.; Blake, A.; Kipman, A.; Moore, R. Real-time human pose recognition in parts from single depth images. Commun. ACM 2013, 56, 116–124. [Google Scholar] [CrossRef]
- Semwal, V.B.; Gora, C.N. Toward developing a computational model for bipedal push recovery—A brief. IEEE Sens. J. 2015, 15, 2021–2022. [Google Scholar] [CrossRef]
- Sardain, P.; Guy, B. Forces acting on a biped robot. Center of pressure-zero moment point. IEEE Trans. Syst. Man Cybern. Part A 2004, 34, 630–637. [Google Scholar] [CrossRef]
- Choi, J.H.; Grizzle, J.W. Planar bipedal walking with foot rotation. In Proceedings of the American Control Conference, Portland, OR, USA, 8–10 June 2005; pp. 4909–4916. [Google Scholar]
- Sakaino, S.; Tomoya, S.; Kouhei, O. Multi-DOF micro-macro bilateral controller using oblique coordinate control. IEEE Trans. Ind. Inf. 2011, 7, 446–454. [Google Scholar] [CrossRef]
- Zhao, Y.; Sentis, L. A three dimensional foot placement planner for locomotion in very rough terrains. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots (Humanoids), Osaka, Japan, 29 November–1 December 2012; pp. 726–733. [Google Scholar]
- Zeng, J.; Chen, H.; Yin, Y.; Yin, Y. A Humanoid Robot Gait Planning and Its Stability Validation. J. Comput. Commun. 2014, 2, 68. [Google Scholar] [CrossRef]
- Ho, Y.F.; Li, T.H.S.; Kuo, P.H.; Ye, Y.T. Parameterized gait pattern generator based on linear inverted pendulum model with natural ZMP references. Knowl. Eng. Rev. 2016, 32, e3. [Google Scholar] [CrossRef]
- Vukobratovic, M.; Manja, K. Kinematics and Trajectory Synthesis of Manipulation Robots; Springer: Berlin, Germany, 2013; Volume 3. [Google Scholar]
- Capi, G.; Nasu, Y.; Barolli, L.; Mitobe, K. Real time gait generation for autonomous humanoid robots: A case study for walking. Robot. Auton. Syst. 2003, 42, 107–116. [Google Scholar] [CrossRef]
- Salatian, A.W.; Yi, K.Y.; Zheng, Y.F. Reinforcement learning for a biped robot to climb sloping surfaces. J. Robot. Syst. 1997, 14, 283–296. [Google Scholar] [CrossRef]
- Shi, H.; Li, X.; Liang, W.; Chen, H.; Wang, S. A novel fuzzy omni-directional gait planning algorithm for biped robot. In Proceedings of the 17th IEEE/ACIS International Conference on Software Engineering, Artificial Intelligence, Networking and Parallel/Distributed Computing (SNPD), Shanghai, China, 30 May–1 June 2016; pp. 71–76. [Google Scholar]
- Lee, H.W. A study of the use of fuzzy control theory to stabilize the gait of biped robots. Robotica 2016, 34, 777–790. [Google Scholar] [CrossRef]
- Zoss, A.B.; Hami, K.; Andrew, C. Biomechanical design of the Berkeley lower extremity exoskeleton (BLEEX). IEEE/ASME Trans. Mechatron. 2006, 11, 128–138. [Google Scholar] [CrossRef]
- Sankai, Y. Leading edge of cybernics: Robot suit hal. In Proceedings of the International Joint Conference, Orlando, FL, USA, 12–17 August 2007; pp. 1–2. [Google Scholar]
- Chen, B.; Ma, H.; Qin, L.Y.; Gao, F.; Chan, K.M.; Law, S.W.; Qin, L.; Liao, W.H. Recent developments and challenges of lower extremity exoskeletons. J. Orthop. Transl. 2016, 5, 26–37. [Google Scholar]
- Ferrati, F.; Bortoletto, R.; Pagello, E. Virtual modelling of a real exoskeleton constrained to a human musculoskeletal model. In Conference on Biomimetic and Biohybrid Systems; Springer: Berlin/Heidelberg, Germany, 2013; pp. 96–107. [Google Scholar]
- TOYOTA Global Newsroom. Available online: http://newsroom.toyota.co.jp/en/detail/15989382 (accessed on 30 October 2017).
- Dzahir, M.A.M.; Yamamoto, S.I. Recent trends in lower-limb robotic rehabilitation orthosis: Control scheme and strategy for pneumatic muscle actuated gait trainers. Robotics 2014, 3, 120–148. [Google Scholar] [CrossRef]
- Wehner, M.; Quinlivan, B.; Aubin, P.M.; Martinez-Villalpando, E.; Baumann, M.; Stirling, L.; Walsh, C. A lightweight soft exosuit for gait assistance. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 3362–3369. [Google Scholar]
- Collins, S.H.; Wiggin, M.B.; Sawicki, G.S. Reducing the energy cost of human walking using an unpowered exoskeleton. Nature 2015, 522, 212–215. [Google Scholar] [CrossRef] [PubMed]
- Panizzolo, F.A.; Galiana, I.; Asbeck, A.T.; Siviy, C.; Schmidt, K.; Holt, K.G.; Walsh, C.J. A biologically-inspired multi-joint soft exosuit that can reduce the energy cost of loaded walking. J. Neuroeng. Rehabil. 2016, 13, 43. [Google Scholar] [CrossRef] [PubMed]
- Zeilig, G.; Weingarden, H.; Zwecker, M.; Dudkiewicz, I.; Bloch, A.; Esquenazi, A. Safety and tolerance of the ReWalk™ exoskeleton suit for ambulation by people with complete spinal cord injury: A pilot study. J. Spinal Cord Med. 2012, 35, 96–101. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Fiers, P.; Witte, K.A.; Jackson, R.W.; Poggensee, K.L.; Atkeson, C.G.; Collins, S.H. Human-in-the-loop optimization of exoskeleton assistance during walking. Science 2017, 356, 1280–1284. [Google Scholar] [CrossRef] [PubMed]
Figure 1.
The historical development of bipedal robots. (a) WAP-1; (b) WAP-3; (c) WL-5; (d) WL-9DR; (e) WL-10RD; (f) WL-12; (g) Honda P-1; (h) BIP2000; (i) Honda P-2; (j) Honda P-3; (k) ASIMO; (l) KHR-2; (m) HUBO; (n) NAO; (o) LOLA. ((a–e,g,i–m) were reproduced with permission from [36]; (f) was reproduced with permission from [37], Copyright Springer, 1997; (h) was reproduced with permission from [38], Copyright Elsevier, 2004; (n) was reproduced with permission from [39], Copyright Springer, 2014; (o) was reproduced with permission from [40], Copyright Springer, 2013).
Figure 1.
The historical development of bipedal robots. (a) WAP-1; (b) WAP-3; (c) WL-5; (d) WL-9DR; (e) WL-10RD; (f) WL-12; (g) Honda P-1; (h) BIP2000; (i) Honda P-2; (j) Honda P-3; (k) ASIMO; (l) KHR-2; (m) HUBO; (n) NAO; (o) LOLA. ((a–e,g,i–m) were reproduced with permission from [36]; (f) was reproduced with permission from [37], Copyright Springer, 1997; (h) was reproduced with permission from [38], Copyright Elsevier, 2004; (n) was reproduced with permission from [39], Copyright Springer, 2014; (o) was reproduced with permission from [40], Copyright Springer, 2013).
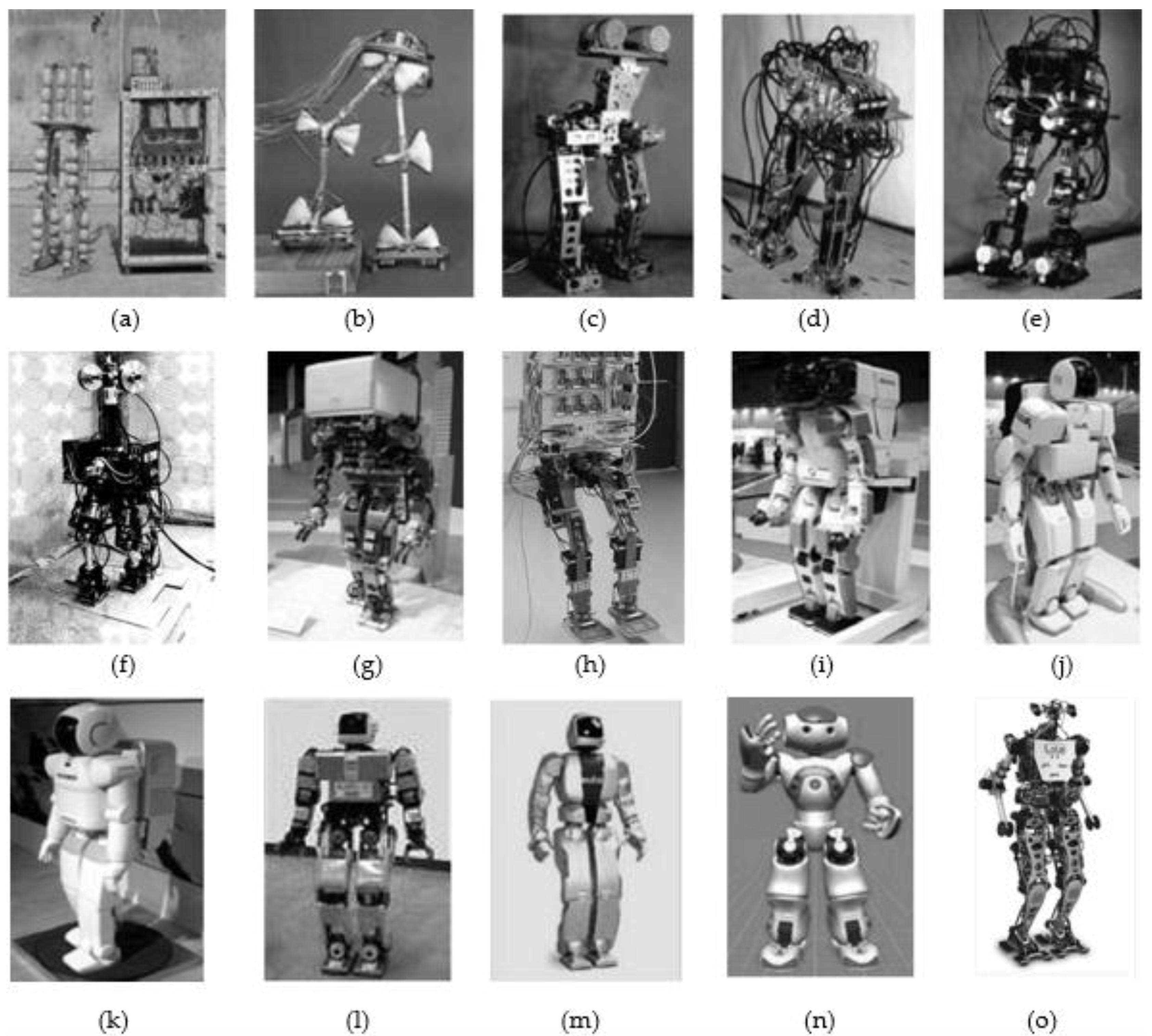
Figure 2.
Popular bipedal robots at current stage. (a) HRP-4C used for entertainment; (b) SAFFiR used for firefighting; (c) Atlas walking on an uneven ground. ((a) was reproduced with permission from [36]; (b) was reproduced with permission from [48], Copyright Elsevier, 2015; (c) was reproduced with permission from [49], Copyright Springer, 2016.)
Figure 2.
Popular bipedal robots at current stage. (a) HRP-4C used for entertainment; (b) SAFFiR used for firefighting; (c) Atlas walking on an uneven ground. ((a) was reproduced with permission from [36]; (b) was reproduced with permission from [48], Copyright Elsevier, 2015; (c) was reproduced with permission from [49], Copyright Springer, 2016.)
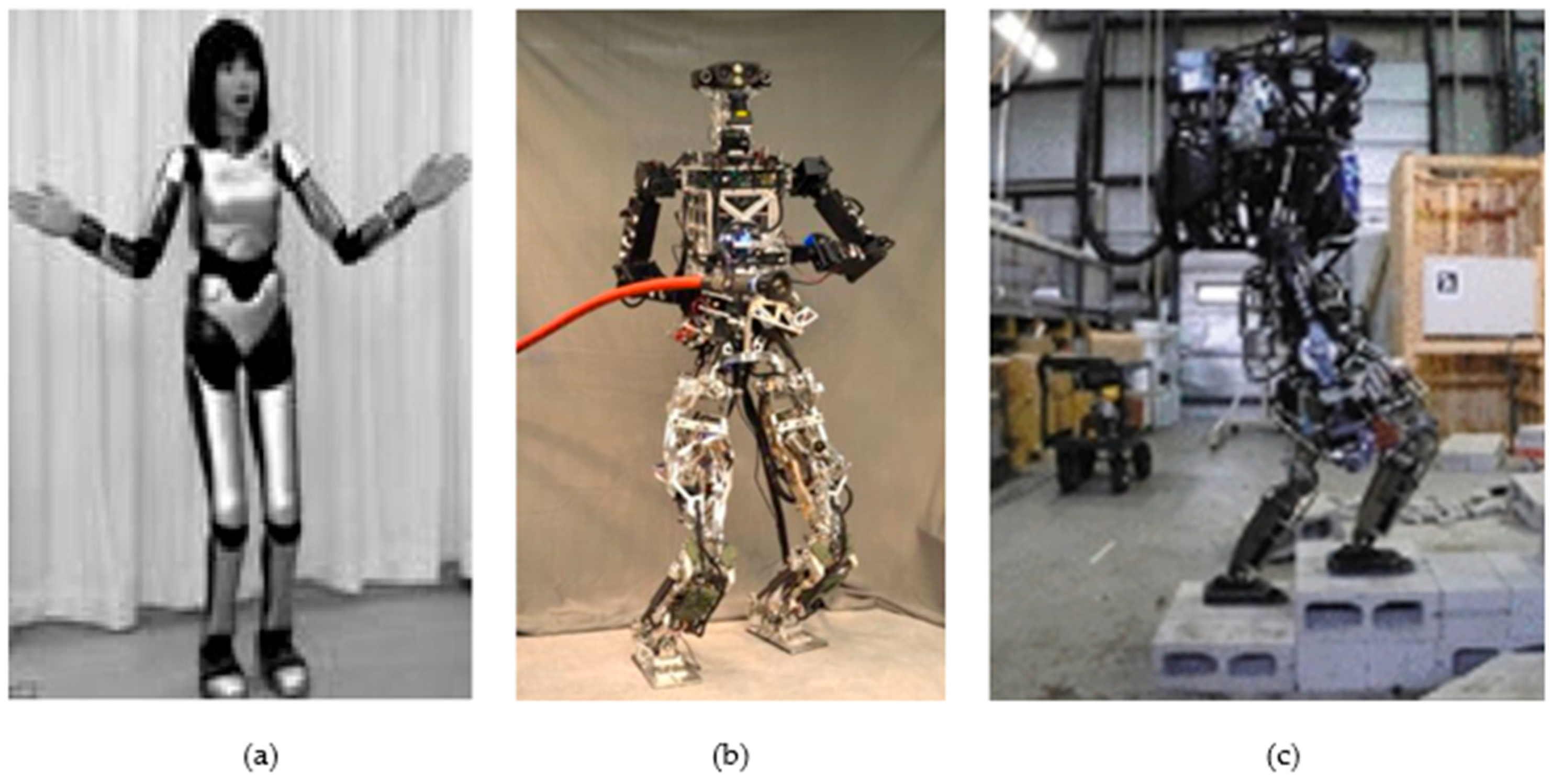
Figure 3.
The mechanical structure of the bipedal locomotion. (a) The classic mechanical structure with 12 degrees of freedom; (b) The rotating hinge structure.
Figure 3.
The mechanical structure of the bipedal locomotion. (a) The classic mechanical structure with 12 degrees of freedom; (b) The rotating hinge structure.
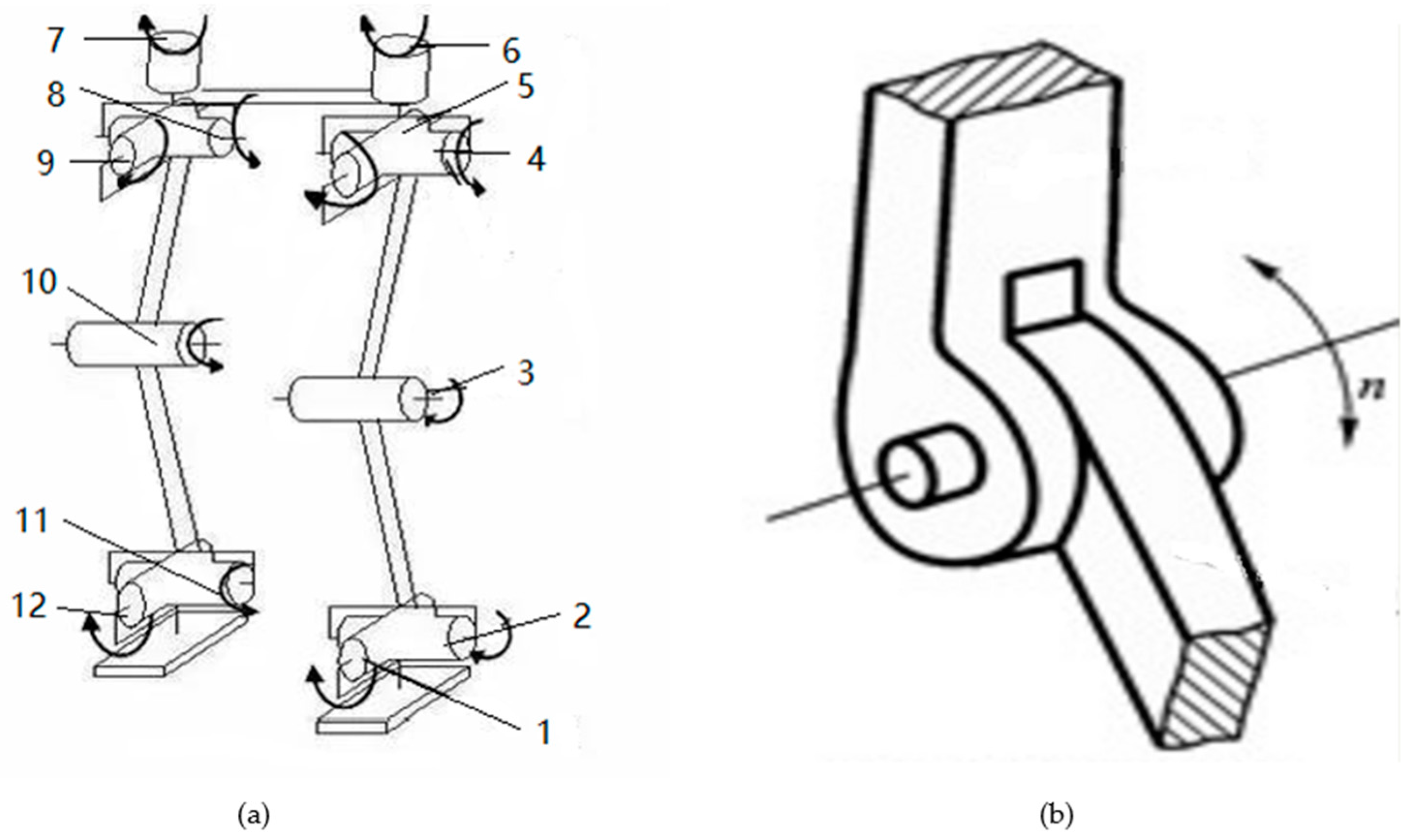
Figure 4.
The model-based gait planning (a) The multi-link model; (b) The inverted pendulum model. ((a) was reproduced with permission from [63]; (b) was reproduced with permission from [64], Copyright Cambridge University Press, 2016.)
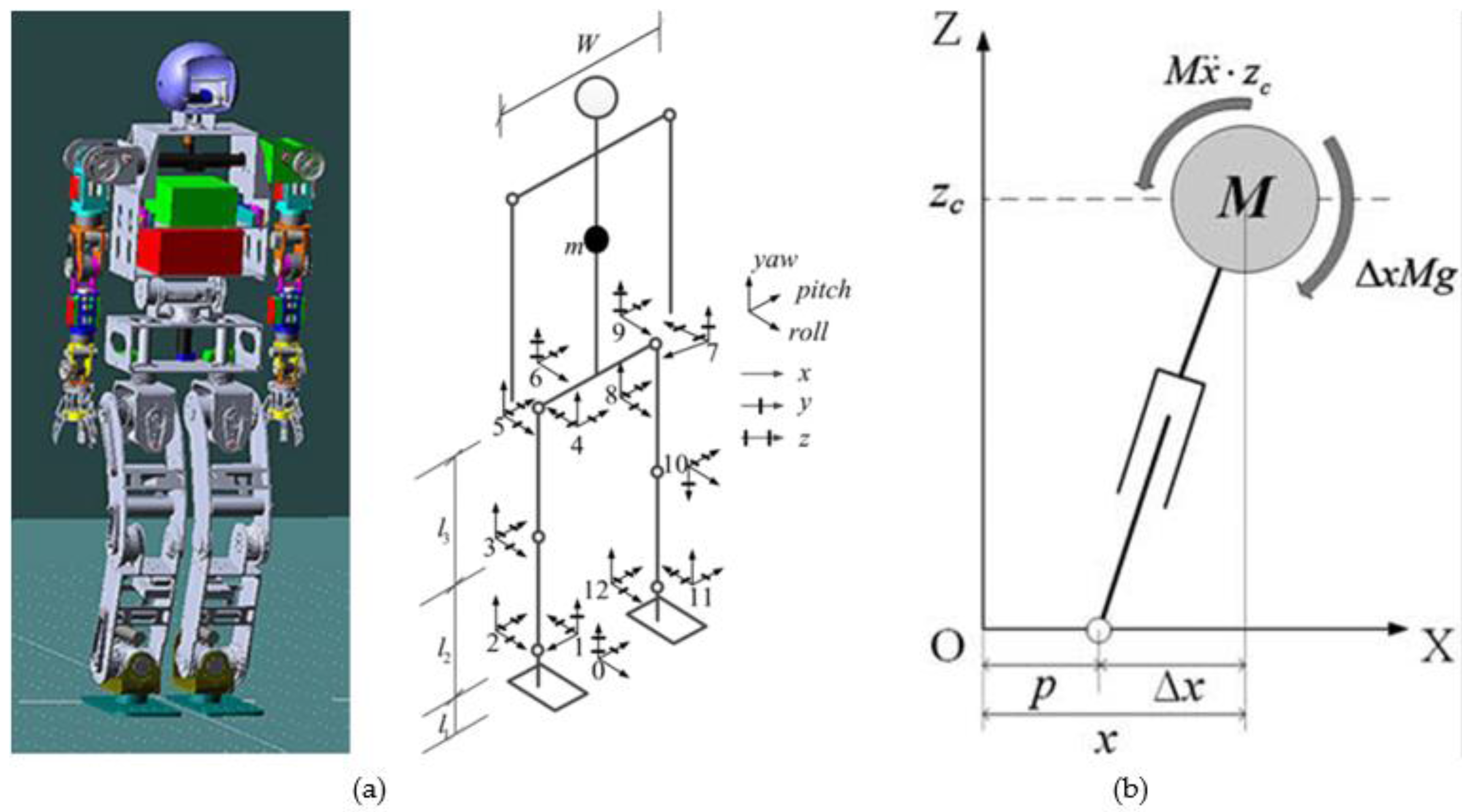
Figure 5.
The wearable exoskeleton robot. (a) BLEEX; (b) Cyberdyne HAL; (c); Israel ReWalk; (d) Rex Bionics’ Rex. ((a,c) were reproduced with permission from [72]; (b,d) were reproduced with permission from [73], Copyright Springer, 2013.)
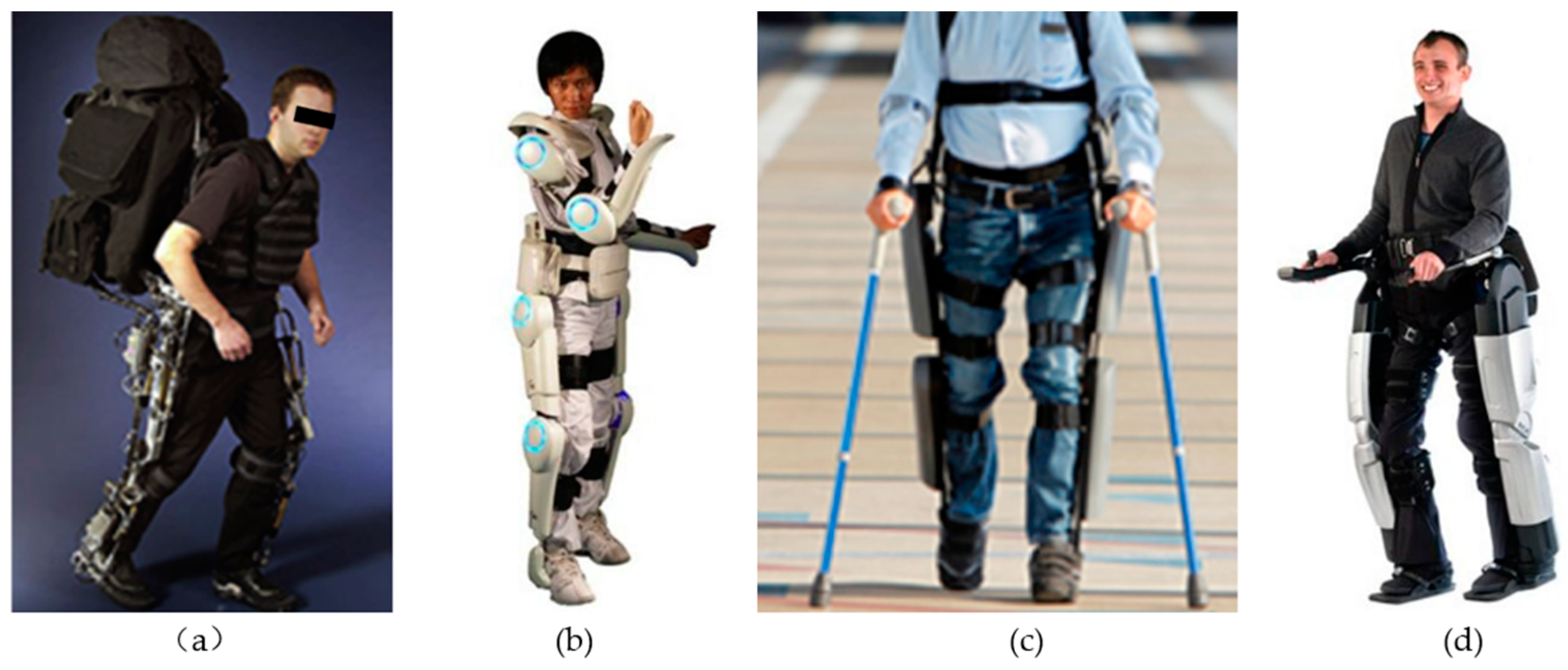
Figure 6.
Rehabilitation equipment. (a) LOKOMAT; (b) LokoHelp. (reproduced with permission from [75].)
Figure 6.
Rehabilitation equipment. (a) LOKOMAT; (b) LokoHelp. (reproduced with permission from [75].)
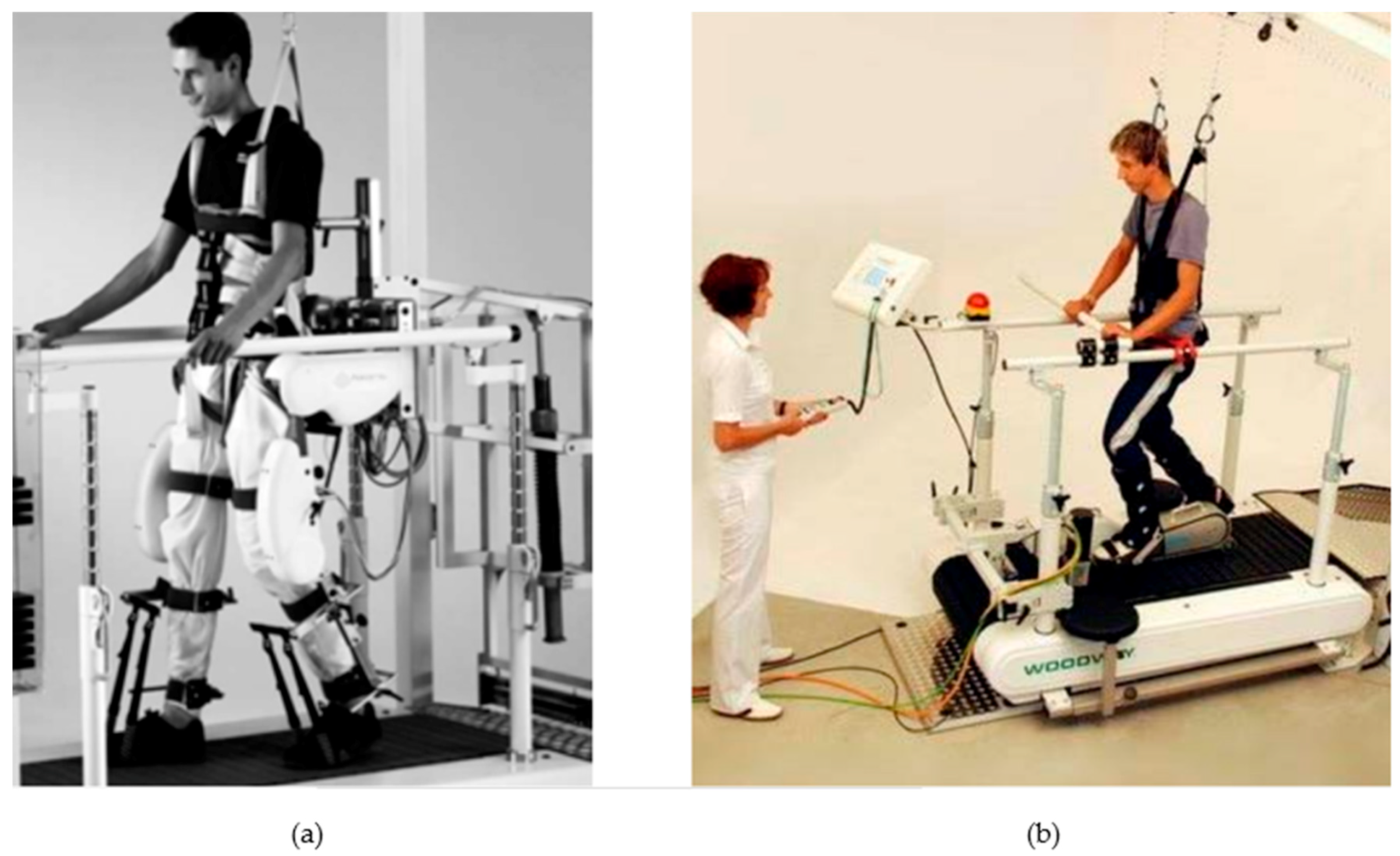
Figure 7.
Advanced exoskeleton robot. (a) Soft exoskeleton robot; (b) Unpowered exoskeleton robot Exoboot. ((a) was reproduced with permission from [78]; (b) was reproduced with permission from [77], Copyright Nature, 2015.)
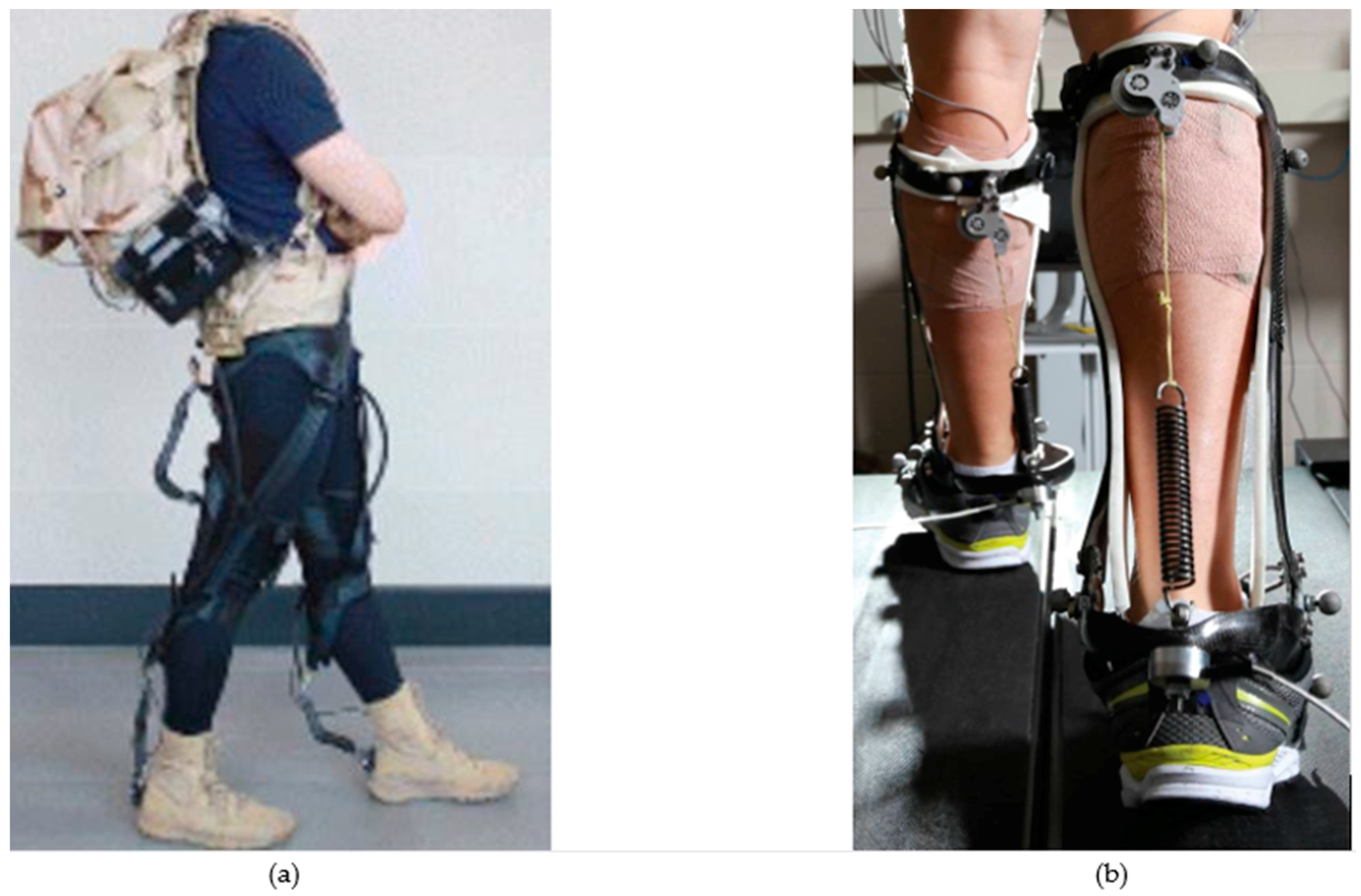
Figure 8.
Human-in-the-loop optimization of exoskeleton assistance during walking (reproduced with permission from [80], Copyright Science, 2017).
Figure 8.
Human-in-the-loop optimization of exoskeleton assistance during walking (reproduced with permission from [80], Copyright Science, 2017).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
The main development of the bipedal robot [3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24,25,26,27,28,29,30,31,32,33,34,35].
| Time | Scientist/Institution | Achievement |
|---|---|---|
| 1968 | R. Smo-Sher, United States | Rig |
| 1969 | M. Vukobratovic, Yugoslavia | ZMP stability criteria |
| 1969 | Kato Ichiro, Japan | WAP-1 |
| 1970 | Witt, United Kingdom | “Witt” type robot |
| 1984 | Kato Ichiro, Japan | WL-10RD |
| 1986 | Honda, Japan | E0 |
| 1988 | National University of Defense Technology, China | KDW-I |
| 1989 | Mogeer, United States | Passive Dynamic Waking |
| 1990 | Y. F. Zheng et al., United States | Neural networks, SD-1 |
| 1993 | Honda, Japan | P-1 |
| 1997 | Honda, Japan | P-3 |
| 1997 | J. E. Pratt and G..A. Pratt, United States | Virtual model control |
| 1999 | MIT, United States | COG |
| 2000 | Honda, Japan | ASIMO |
| 2000 | Sony, Japan | SDR-3X |
| 2002 | Beijing Institute of Technology, China | BHR |
| 2004 | South Korea | HUBO |
| 2004 | RobotCub Consortium, Italy | iCUB |
| 2005 | University of Florida, United States | Rabbit |
| 2005 | MIT, America | Domo |
| 2007 | Aldebaran Robotics, France | NAO |
| 2008 | University of Tehran, Iran | Surena I |
| 2009 | Technical University of Munich, German | LOLA |
| 2009 | Aldebaran Robotics, France | Romeo |
| 2010 | AIST, Japan | HRP-4C |
| 2012 | NRL, United States | SAFFiR |
| 2013 | Institute of Robotics and Mechatronics, German | TORO |
| 2013 | Boston Dynamics, United States | PETMAN |
| 2015 | University of Tehran, Iran | Surena III |
| 2016 | Boston Dynamics, United States | Atlas |
Table 2.
Comparison of various types of rehabilitation robots.
| Type | Advantages | Disadvantages | Example |
|---|---|---|---|
| Wearable exoskeleton robot | Wearable, the range of use is wide | Uncomfortable, Rigid structure | BLEEX, HAL, ReWalk |
| Rehabilitation equipment | Functional, Rehabilitation effect is good | Bulky | Welwalk-1000, LOKOMAT |
| Soft exoskeleton robot | Light quality, Unconstrained | Auxiliary force is relatively small | Exosuit |
| Unpowered exoskeleton robot | Unpowered | Structural design is difficult | Exoboot |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Yang, X.; She, H.; Lu, H.; Fukuda, T.; Shen, Y. State of the Art: Bipedal Robots for Lower Limb Rehabilitation. Appl. Sci. 2017, 7, 1182. https://doi.org/10.3390/app7111182
AMA Style
Yang X, She H, Lu H, Fukuda T, Shen Y. State of the Art: Bipedal Robots for Lower Limb Rehabilitation. Applied Sciences. 2017; 7(11):1182. https://doi.org/10.3390/app7111182
Chicago/Turabian StyleYang, Xiong, Haotian She, Haojian Lu, Toshio Fukuda, and Yajing Shen. 2017. "State of the Art: Bipedal Robots for Lower Limb Rehabilitation" Applied Sciences 7, no. 11: 1182. https://doi.org/10.3390/app7111182
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.