
Connectivity Maintenance Based on Multiple Relay UAVs Selection Scheme in Cooperative Surveillance

Abstract
:
1. Introduction
2. Problem Definition
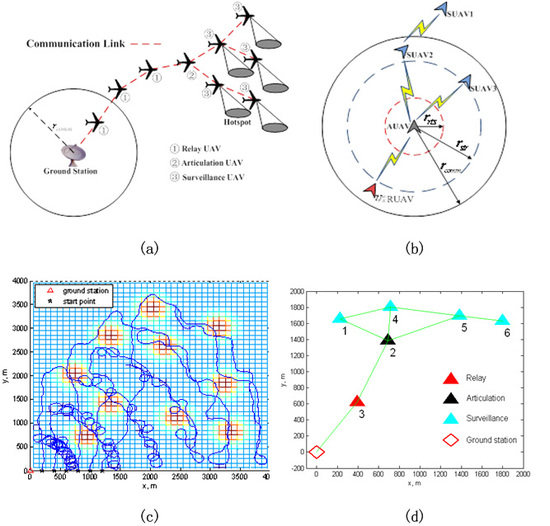
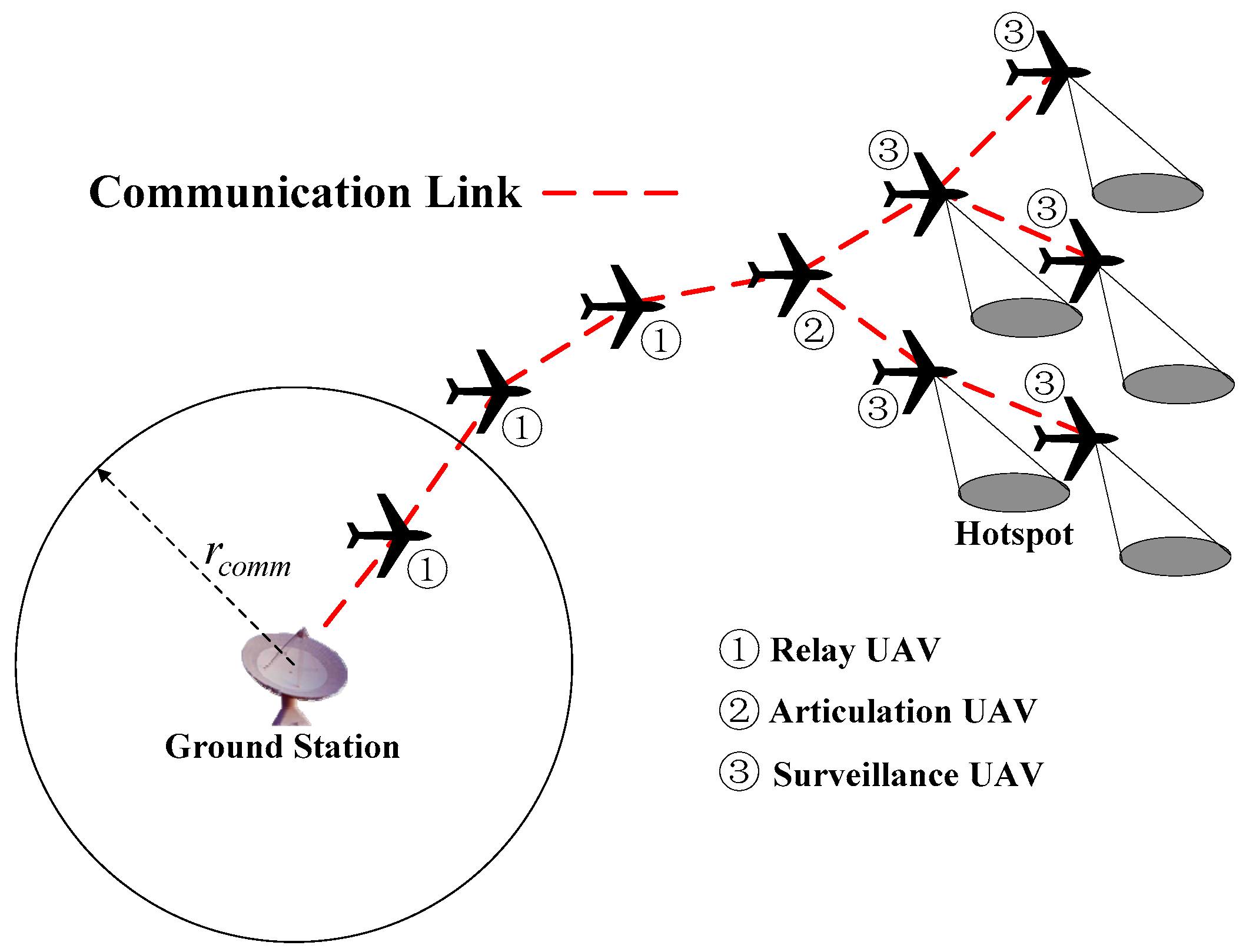
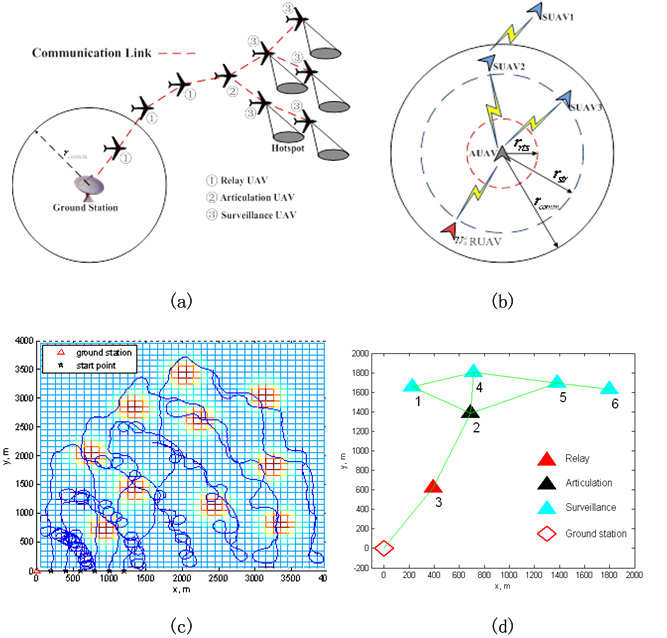
2.1. Multiple UAVs Cooperative Surveillance with Ground Station
2.2. UAV Dynamic Model
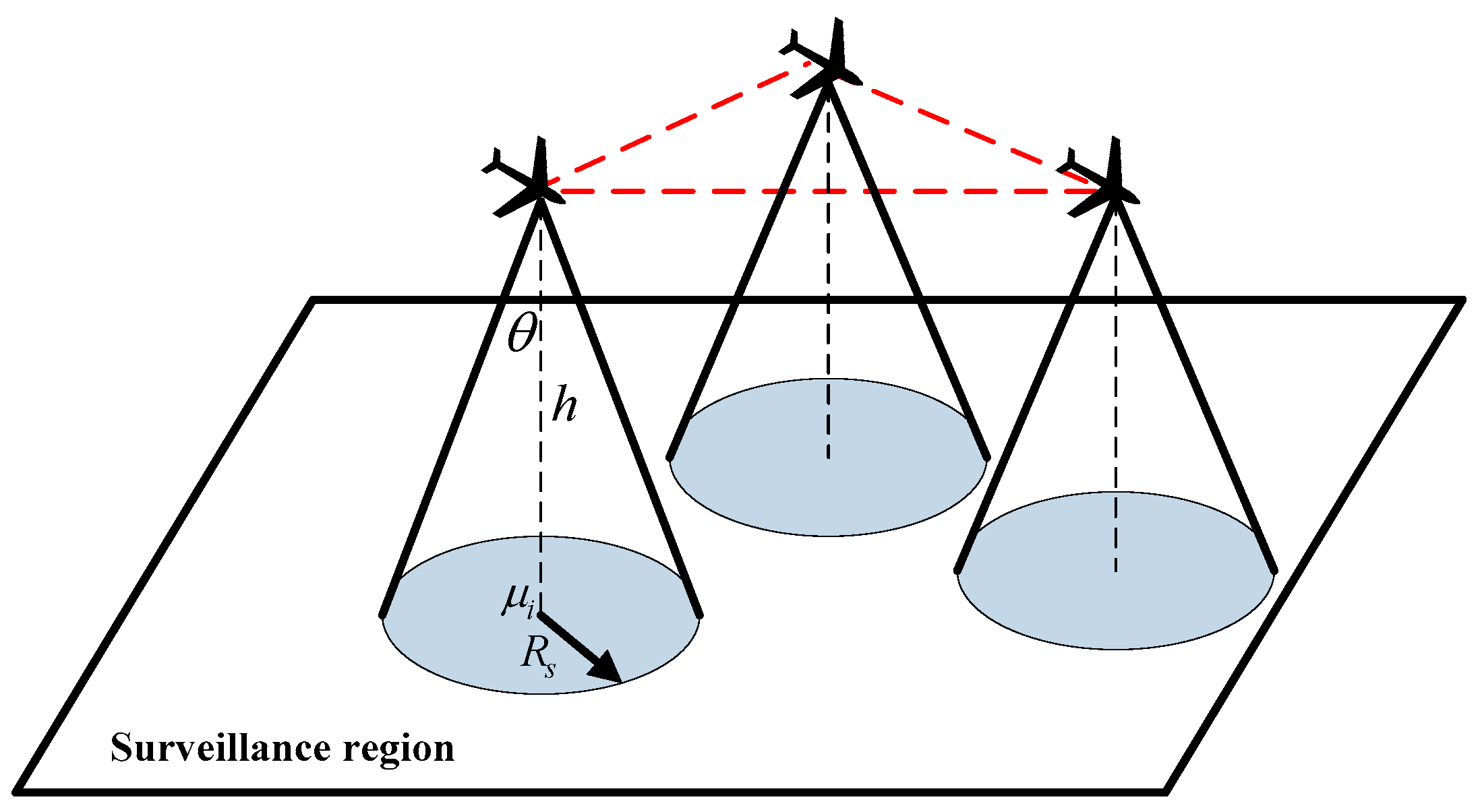
2.3. Sensor Model
2.4. Multiple UAVs Cooperative Surveillance Problem Formulation
3. Multiple Relay UAVs Selection Scheme Based on Fuzzy Optimum Selection
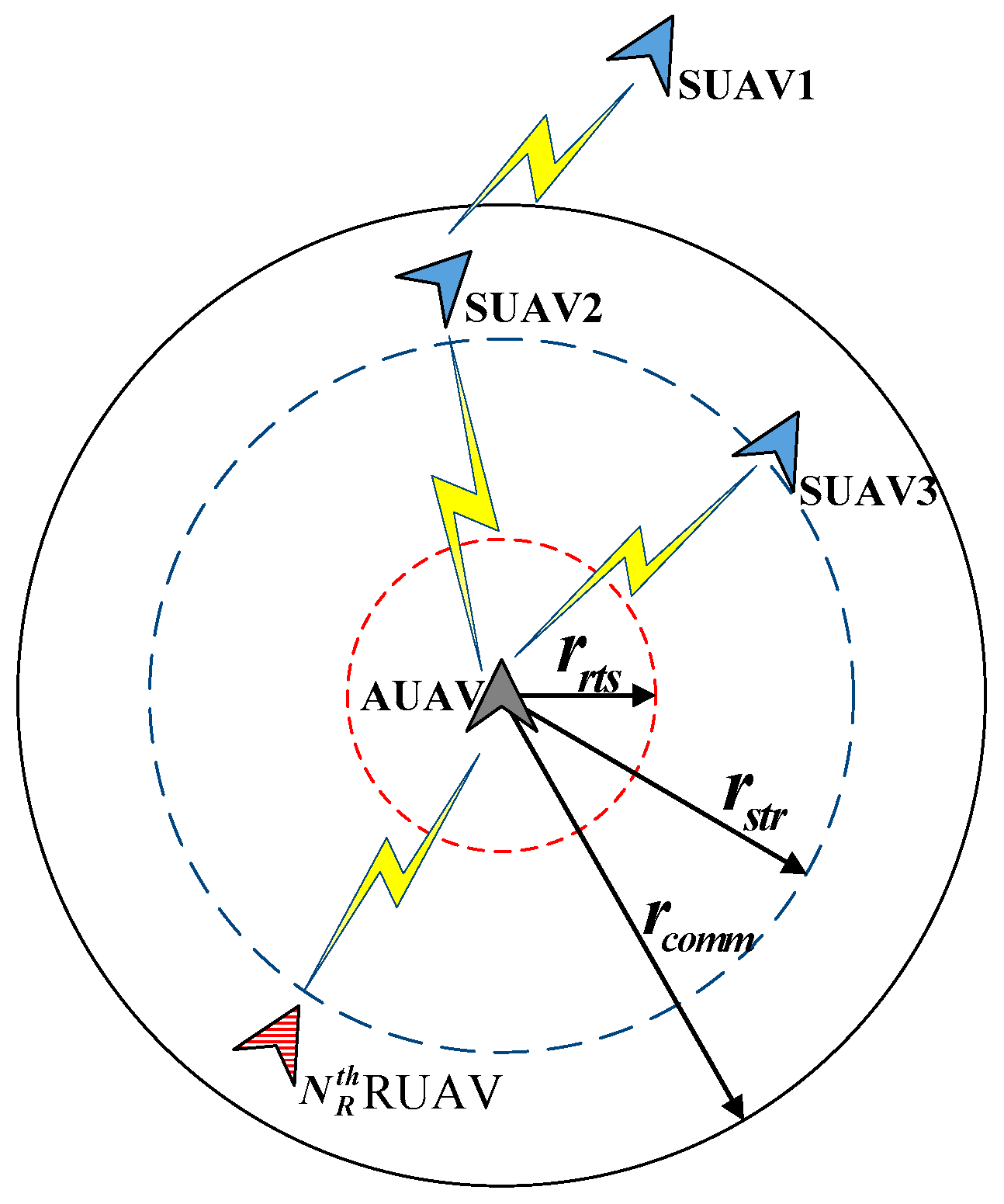
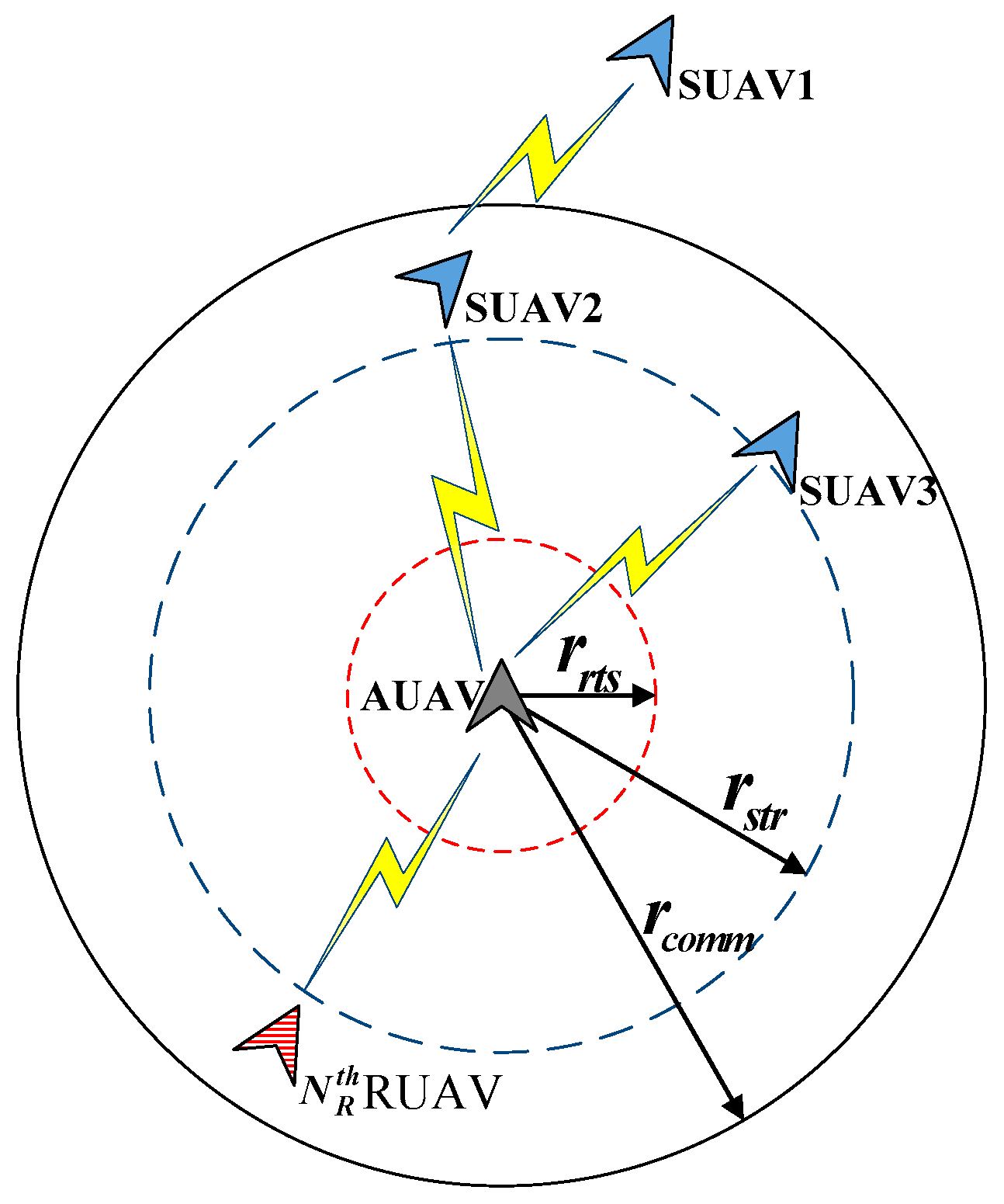
3.1. Three UAV Roles in Cooperative Surveillance with Ground Station
3.2. Membership Degree of UAV Alternatives Assessment Based on Fuzzy Optimum Selection
3.3. Multiple Relay UAVs Selection Scheme in Cooperative Surveillance
3.3.1. Multiple Relay UAVs Selection Stage
3.3.2. Role Conversion Stage
3.3.3. Multiple Relay UAVs Selection Scheme
| Algorithm 1. Multiple Relay UAVs Selection Scheme |
| Input: UAVs state information (positions and roles ) for , the relay UAVs number |
| Output: updated information (roles and circling points ) for . |
| // multiple relay UAVs selection stage: |
| 1. Calculate (Equations (10)–(13)) |
| 2. Membership degree of UAV alternatives assessment based on fuzzy optimum selection (Equations (14)–(23)) |
| 3. , , // represents role allocation operation |
| // role conversion stage: is the role of the ith UAV |
| 4. if there is no SUAV in of AUAV |
| 5. , , // relay UAV supplement |
| 6. else |
| 7. if there is at least one UAV in of the RUAV |
| 8. , , // relay UAV removal |
| 9. endif |
| 10. endif |
| 11. Calculate the circling points for |
4. Multiple UAVs Motion Plan in Cooperative Surveillance
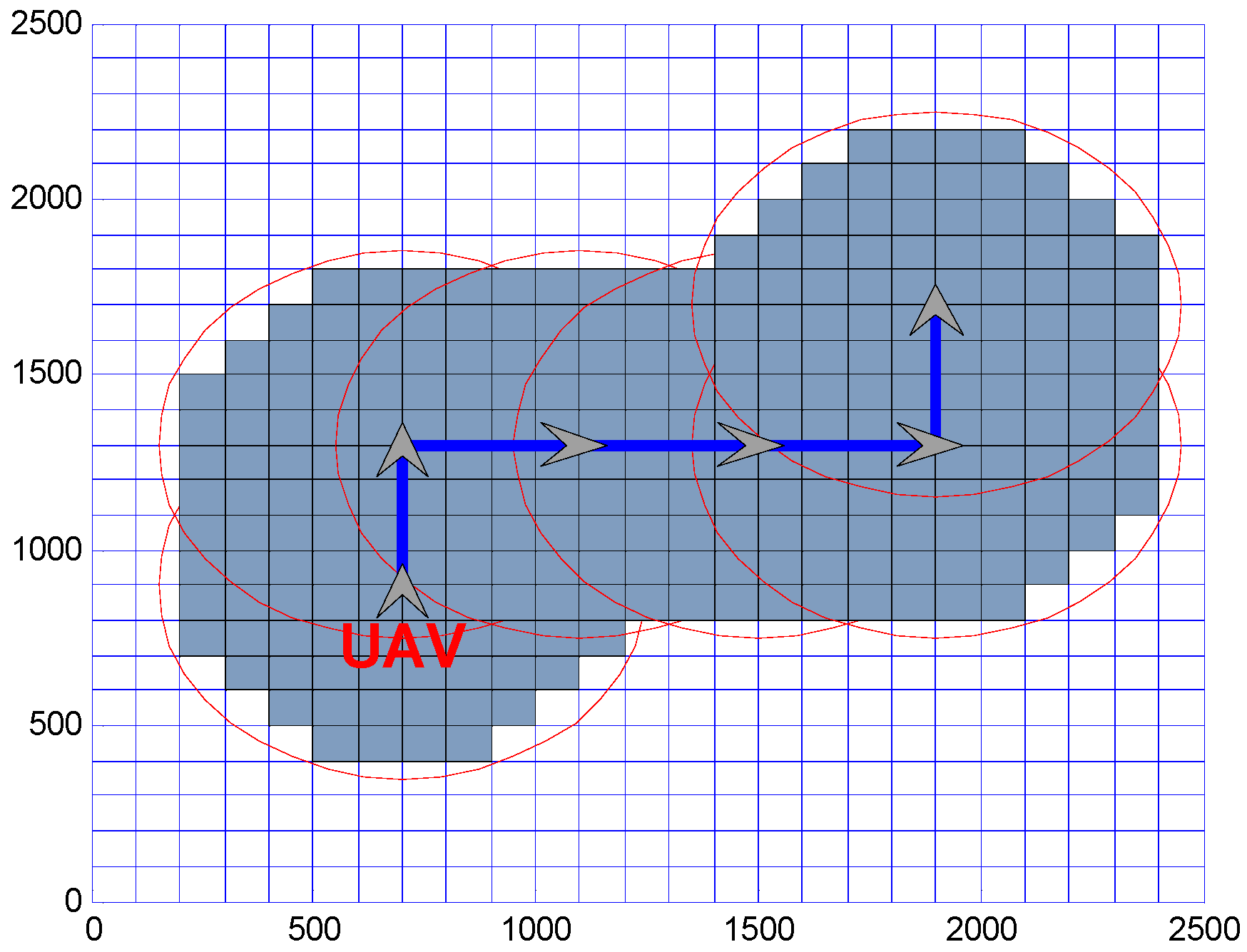
4.1. Receding Horizon Motion Plan Based on UAV Roles
4.2. UAV Control Command Optimization Based on PSO with Elite Mechanism
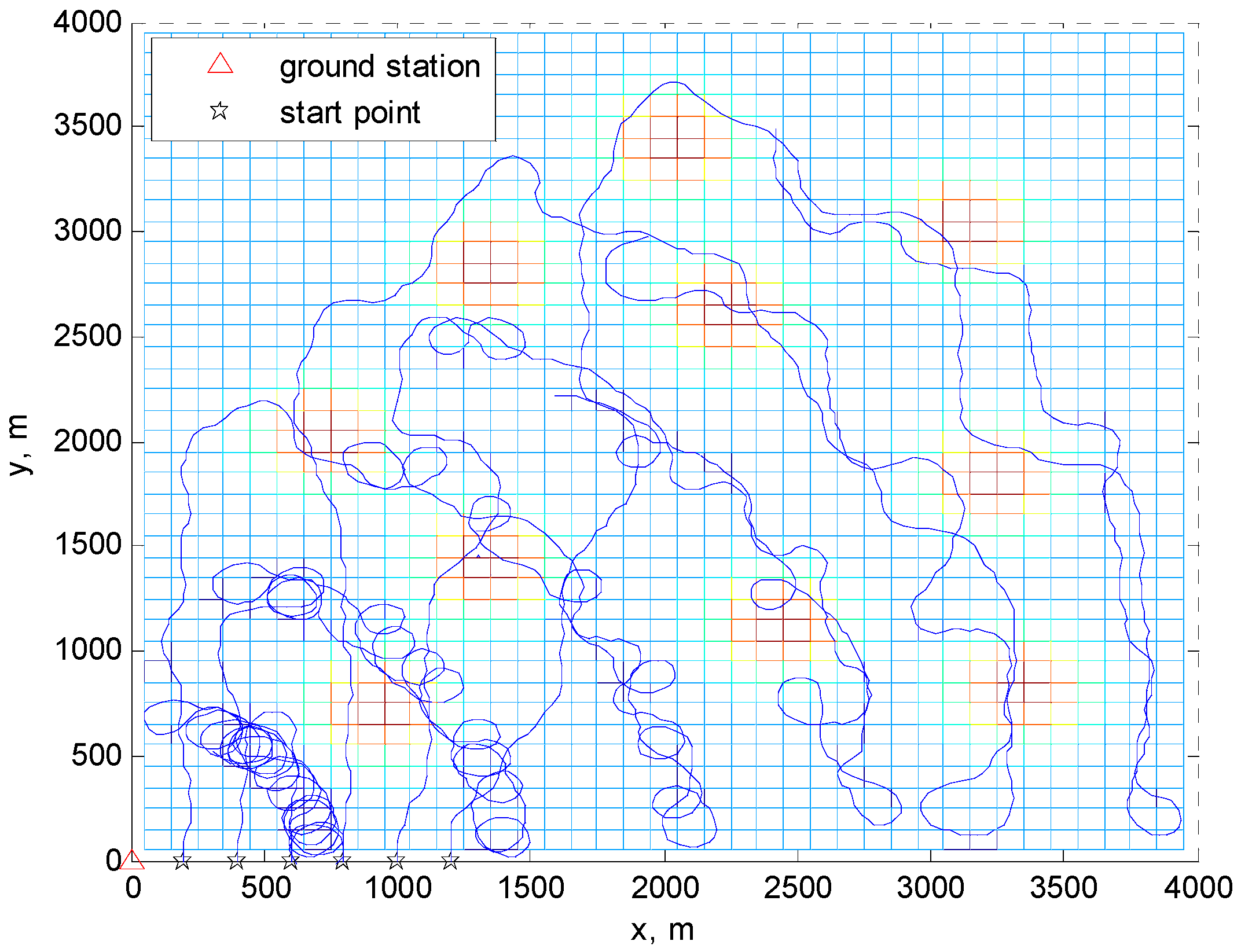
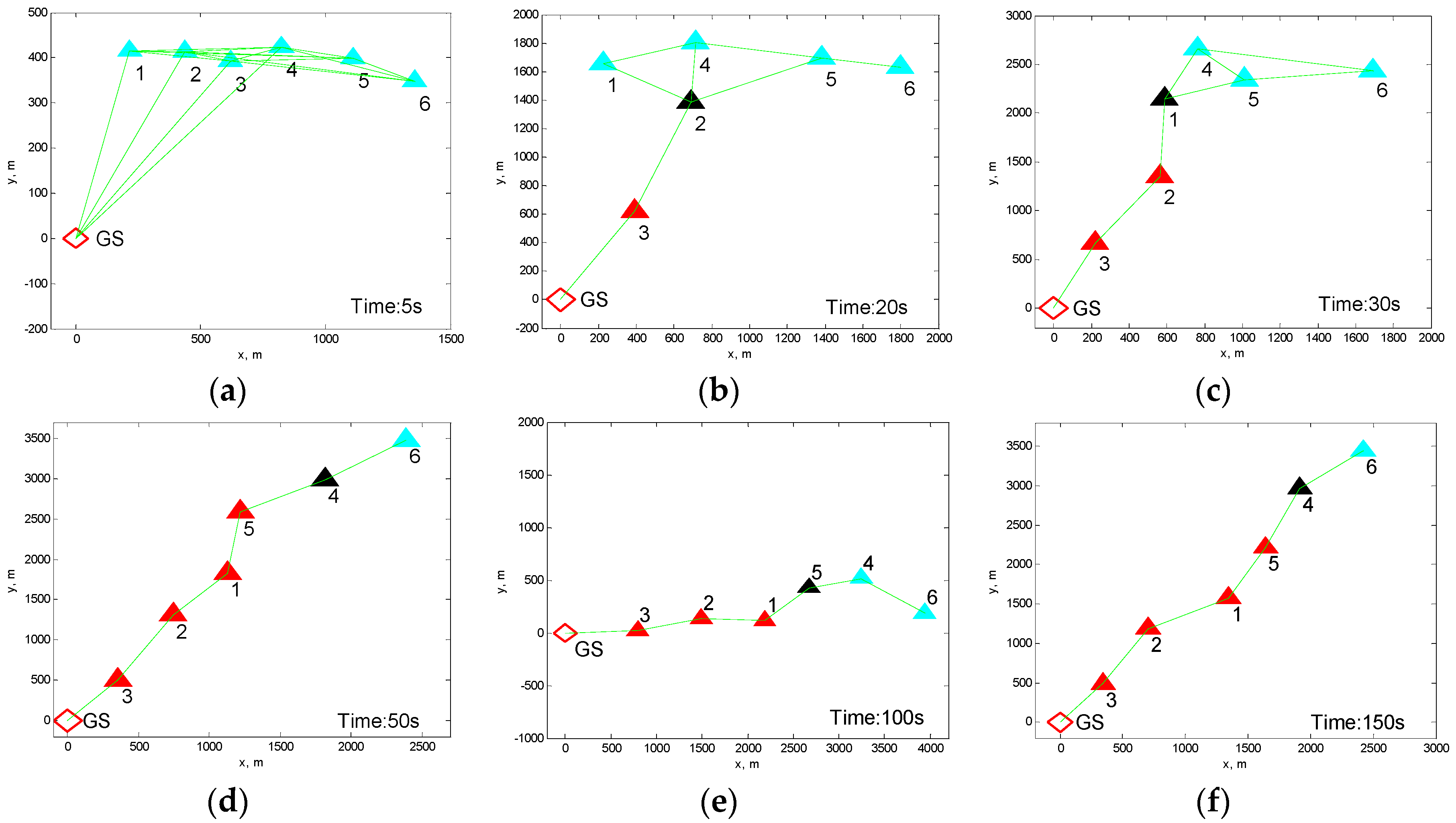
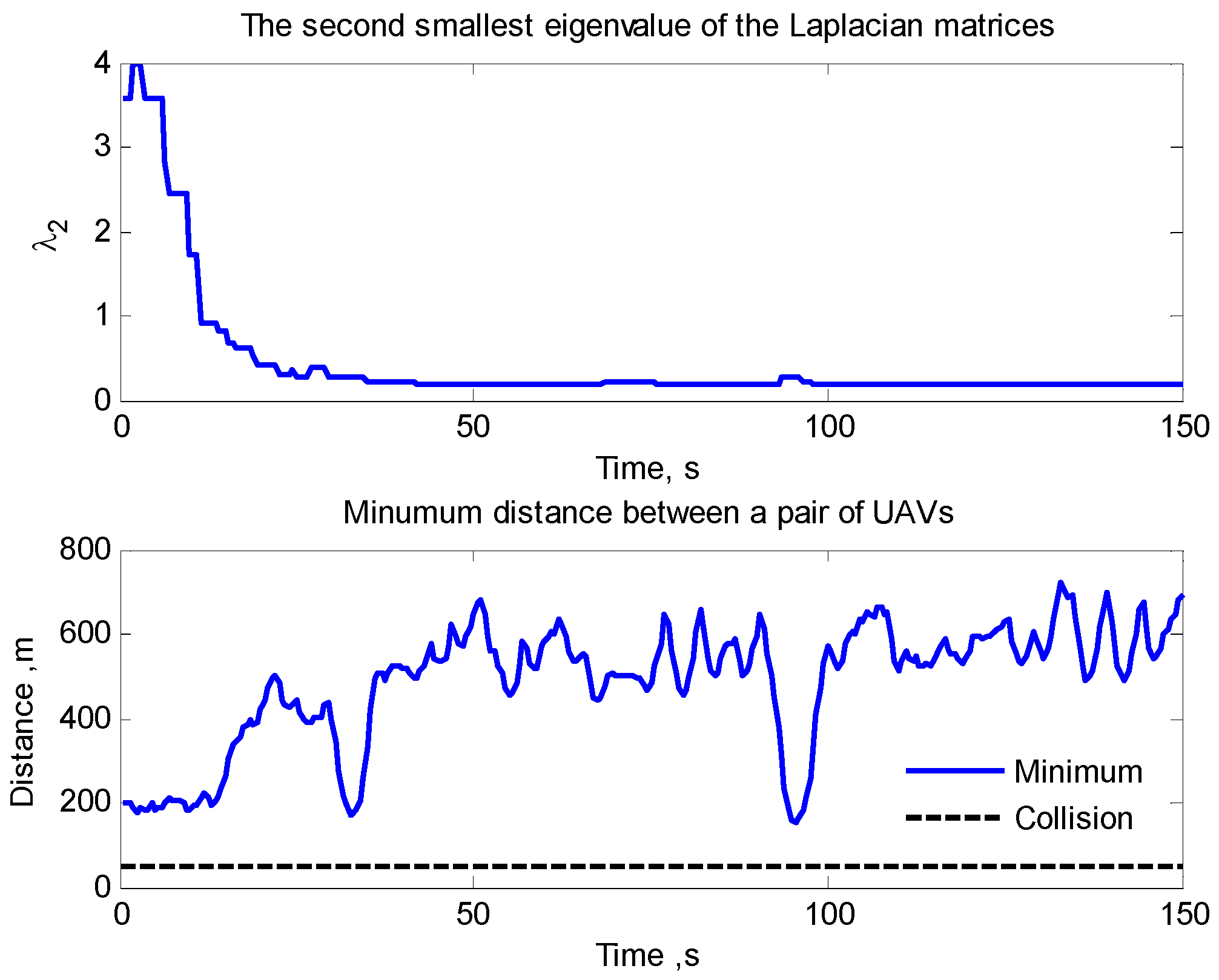
5. Numerical Results
6. Conclusions and Future Works
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Yu, H.; Meier, K.; Argyle, M.; Beard, R.W. Cooperative path planning for target tracking in urban environments using unmanned air and ground vehicles. IEEE/ASME Trans. Mechatron. 2015, 20, 541–552. [Google Scholar] [CrossRef]
- Zhou, Y.; Bao, Z.; Wang, R.; Qiao, S.; Zhou, Y. Quantum Wind Driven Optimization for Unmanned Combat Air Vehicle Path Planning. Appl. Sci. 2015, 5, 1457–1483. [Google Scholar] [CrossRef]
- Gonzalez, L.F.; Montes, G.A.; Puig, E.; Johnson, S.; Mengersen, K.; Gaston, K.J. Unmanned Aerial Vehicles (UAVs) and artificial intelligence revolutionizing wildlife monitoring and conservation. Sensors 2016, 16, 97. [Google Scholar] [CrossRef] [PubMed]
- Tomic, T.; Schmid, K.; Lutz, P.; Domel, A.; Kassecker, M.; Mair, E.; Grixa, I.L.; Ruess, F.; Suppa, M.; Burschka, D. Toward a fully autonomous UAV: Research platform for indoor and outdoor urban search and rescue. IEEE Robot. Autom. Mag. 2012, 19, 46–56. [Google Scholar] [CrossRef]
- Ianovsky, E.; Kreimer, J. An optimal routing policy for unmanned aerial vehicles (analytical and cross-entropy simulation approach). Ann. Oper. Res. 2011, 189, 215–253. [Google Scholar] [CrossRef]
- Allison, R.S.; Johnston, J.M.; Craig, G.; Jennings, S. Airborne optical and thermal remote sensing for wildfire detection and monitoring. Sensors 2016, 16, 1310. [Google Scholar] [CrossRef] [PubMed]
- Sahingoz, O.K. Networking models in flying ad-hoc networks (FANETs): Concepts and challenges. J. Intell. Robot. Syst. 2014, 74, 513–527. [Google Scholar] [CrossRef]
- Bekmezci, I.; Sahingoz, O.K.; Temel, Ş. Flying Ad-Hoc networks (FANETs): A survey. Ad Hoc Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Cetin, O.; Zagli, I. Continuous airborne communication relay approach using unmanned aerial vehicles. J. Intell. Robot. Syst. 2012, 65, 549–562. [Google Scholar] [CrossRef]
- Hu, J.; Xie, L.; Lum, K.Y.; Xu, J. Multiagent information fusion and cooperative control in target search. IEEE Trans. Control Syst. Technol. 2013, 21, 1223–1235. [Google Scholar] [CrossRef]
- Huang, Q.; Yao, J.; Li, Q.; Zhu, Y. Cooperative Searching Strategy for Multiple Unmanned Aerial Vehicles Based on Modified Probability Map. In Proceedings of the 16th Asia Simulation Conference and SCS Autumn Simulation Multi-Conference, AsiaSim/SCS AutumnSim 2016, Beijing, China, 8–11 October 2016; pp. 279–287.
- Shen, D.; Wei, R.X.; Ru, C.J. Digital pheromone based control method for UAV swarm search. Syst. Eng. Electron. 2013, 35, 591–596. [Google Scholar]
- Gil, A.E.; Passino, K.M.; Cruz, J.B., Jr. Stable cooperative surveillance with information flow constraints. IEEE Trans. Control Syst. Technol. 2008, 16, 856–868. [Google Scholar] [CrossRef]
- Di, B.; Zhou, R.; Duan, H. Potential field based receding horizon motion planning for centrality-aware multiple UAV cooperative surveillance. Aerosp. Sci. Technol. 2015, 46, 386–397. [Google Scholar] [CrossRef]
- Goddemeier, N.; Daniel, K.; Wietfeld, C. Role-based connectivity management with realistic air-to-ground channels for cooperative UAVs. IEEE J. Sel. Areas Commun. 2012, 30, 951–963. [Google Scholar] [CrossRef]
- Zavlanos, M.M.; Pappas, G.J. Controlling connectivity of dynamic graphs. In Proceedings of the 44th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC 2005), Seville, Spain, 12–15 December 2005; pp. 6388–6393.
- Stump, E.; Jadbabaie, A.; Kumar, V. Connectivity management in mobile robot teams. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Pasadena, CA, USA, 19–23 May 2008; pp. 1525–1530.
- Wei, Y.; Yu, F.R.; Song, M. Distributed optimal relay selection in wireless cooperative networks with finite-state markov channels. IEEE Trans. Veh. Technol. 2010, 59, 2149–2158. [Google Scholar]
- Xu, Z.; Zhang, X. Hesitant fuzzy multi-attribute decision making based on TOPSIS with incomplete weight information. Knowl.-Based Syst. 2013, 52, 53–64. [Google Scholar] [CrossRef]
- Zhang, X.; Jin, F.; Liu, P. A grey relational projection method for multi-attribute decision making based on intuitionistic trapezoidal fuzzy number. Appl. Math. Model. 2013, 37, 3467–3477. [Google Scholar] [CrossRef]
- Wei, G. Hesitant fuzzy prioritized operators and their application to multiple attribute decision making. Knowl.-Based Syst. 2012, 31, 176–182. [Google Scholar] [CrossRef]
- Chen, S.Y. Theory of fuzzy optimum selection for multistage and multiobjective decision making system. J. Fuzzy Math. 1994, 2, 163–174. [Google Scholar]
- Huicheng, Z.; Guoli, W.; Qing, Y. A multi-objective fuzzy pattern recognition model for assessing groundwater vulnerability based on the DRASTIC system. Hydrol. Sci. J. 1999, 44, 611–618. [Google Scholar] [CrossRef]
- Li, L.; Lai, K.K. Fuzzy dynamic programming approach to hybrid multiobjective multistage decision-making problems. Fuzzy Sets Syst. 2001, 117, 13–25. [Google Scholar] [CrossRef]
- Chen, P.H. Two-level hierarchical approach to unit commitment using expert system and elite PSO. IEEE Trans. Power Syst. 2012, 27, 780–789. [Google Scholar] [CrossRef]
- Zhu, S.; Wang, D. Adversarial ground target tracking using UAVs with input constraints. J. Intell. Robot. Syst. 2012, 65, 521–532. [Google Scholar] [CrossRef]
- Kriheli, B.; Levner, E.; Spivak, A. Optimal search for hidden targets by unmanned aerial vehicles under imperfect inspections. Am. J. Oper. Res. 2016, 6, 153. [Google Scholar] [CrossRef]
- Wichmann, A.; Korkmaz, T.; Tosun, A.S. Minimum hop and/or minimum distance robot movement with connectivity constraints in WSRNs. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), Austin, TX, USA, 8–12 December 2014; pp. 523–529.
- Liu, B.; Wang, L.; Jin, Y.H. An effective PSO-based memetic algorithm for flow shop scheduling. IEEE Trans. Syst. Man Cybern. Part B 2007, 37, 18–27. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Role | Task | Role Description |
|---|---|---|
| RUAV | preserving communication connection | constructing relay communication links |
| AUAV | connecting RUAV and SUAVs swarm | balancing surveillance mission and network connectivity |
| SUAV | searching and detecting unknown region | maximizing surveillance payoff |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Q.; Zhou, R.; Zhang, J. Connectivity Maintenance Based on Multiple Relay UAVs Selection Scheme in Cooperative Surveillance. Appl. Sci. 2017, 7, 8. https://doi.org/10.3390/app7010008
Zhu Q, Zhou R, Zhang J. Connectivity Maintenance Based on Multiple Relay UAVs Selection Scheme in Cooperative Surveillance. Applied Sciences. 2017; 7(1):8. https://doi.org/10.3390/app7010008
Chicago/Turabian StyleZhu, Qian, Rui Zhou, and Jie Zhang. 2017. "Connectivity Maintenance Based on Multiple Relay UAVs Selection Scheme in Cooperative Surveillance" Applied Sciences 7, no. 1: 8. https://doi.org/10.3390/app7010008