
Vision-Based Perception and Classification of Mosquitoes Using Support Vector Machine



Abstract
:1. Introduction
2. Methods
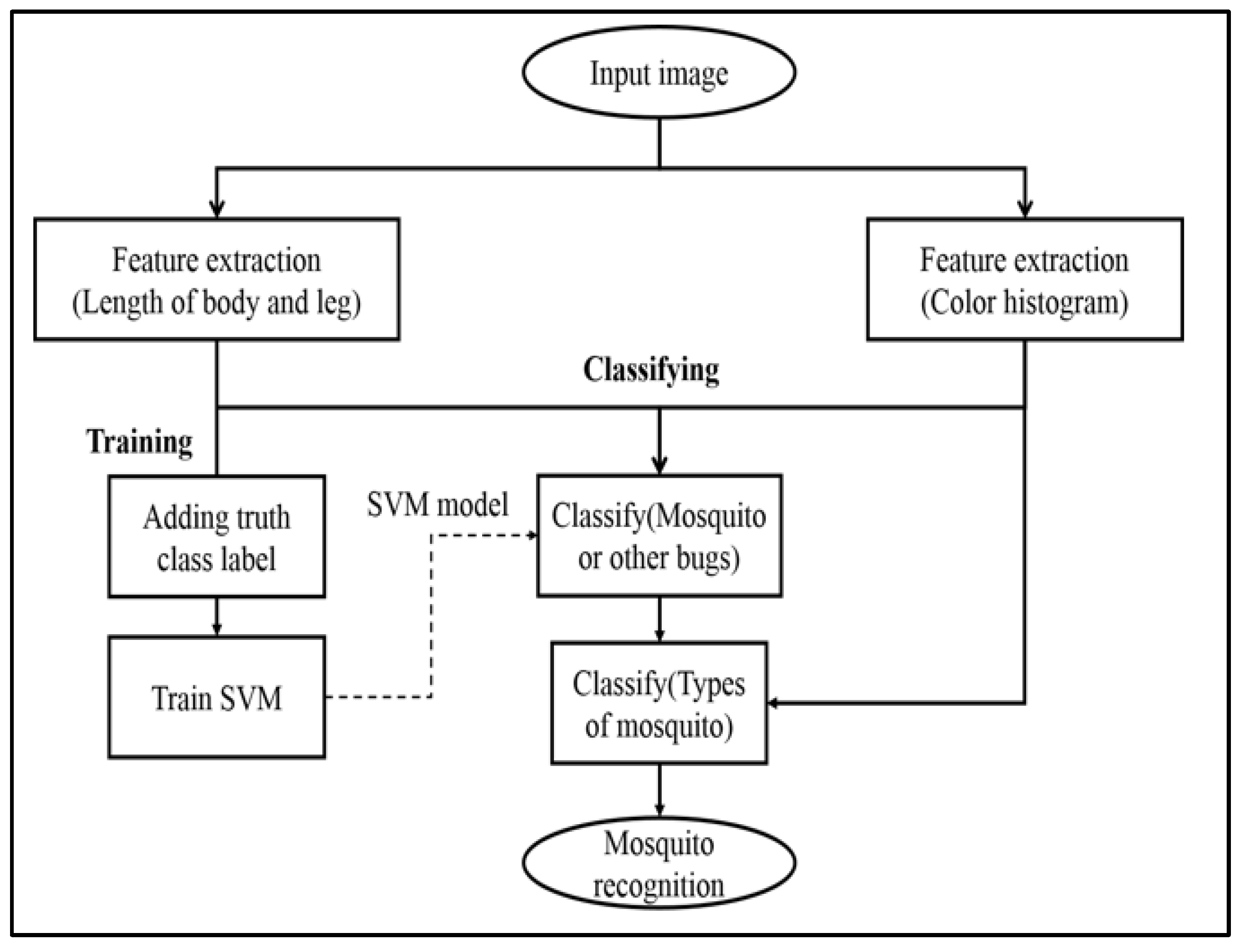
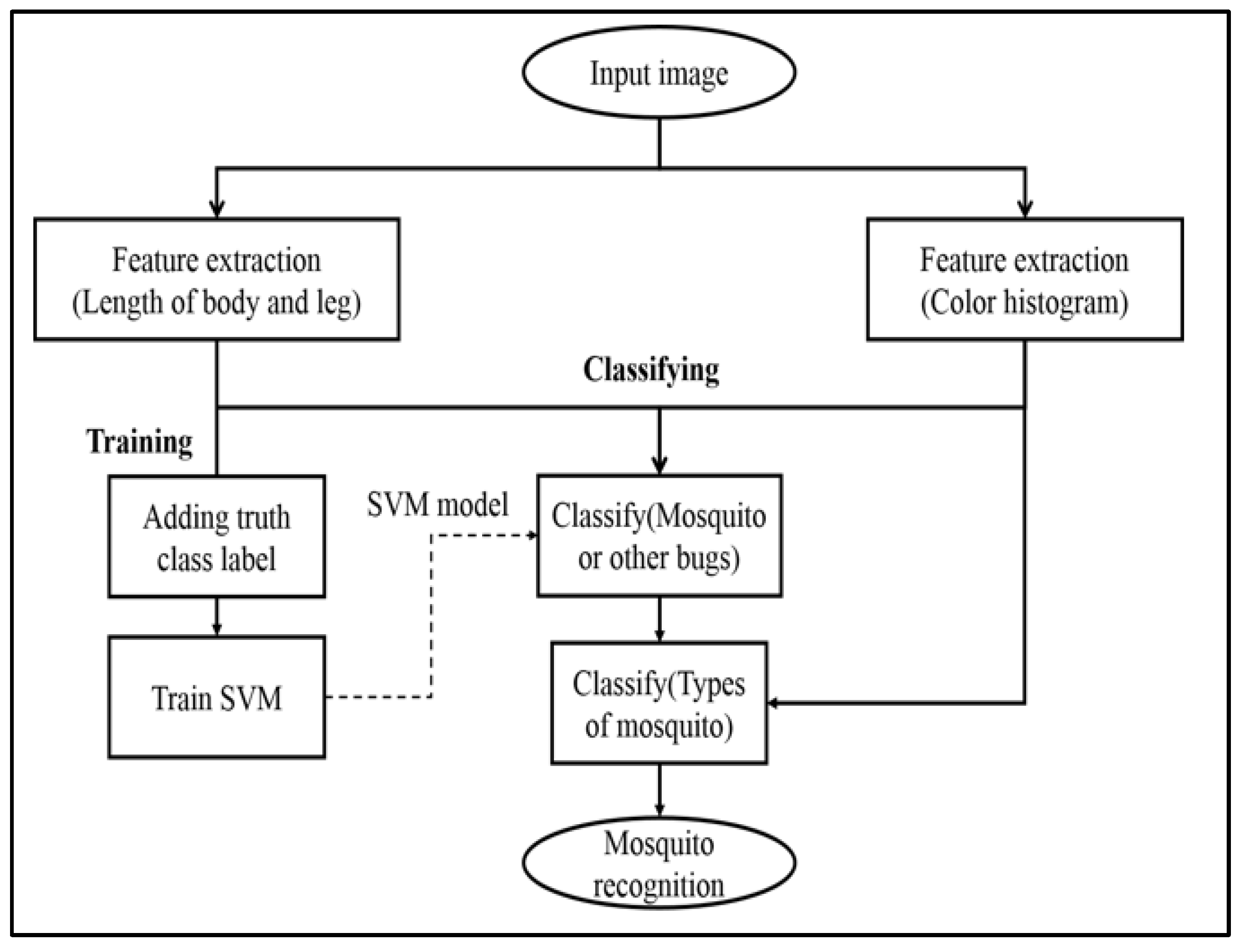
2.1. The System Overview
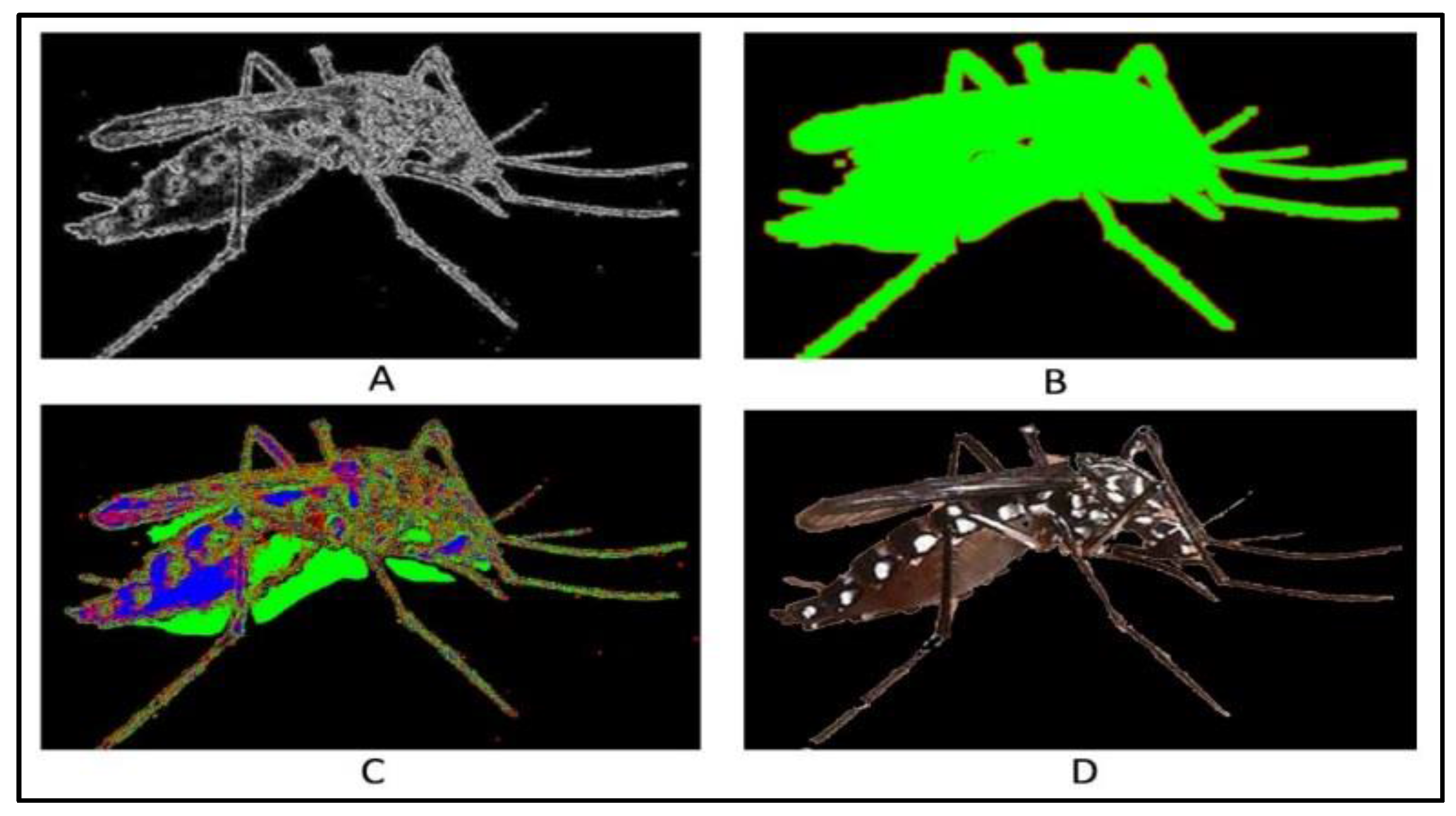
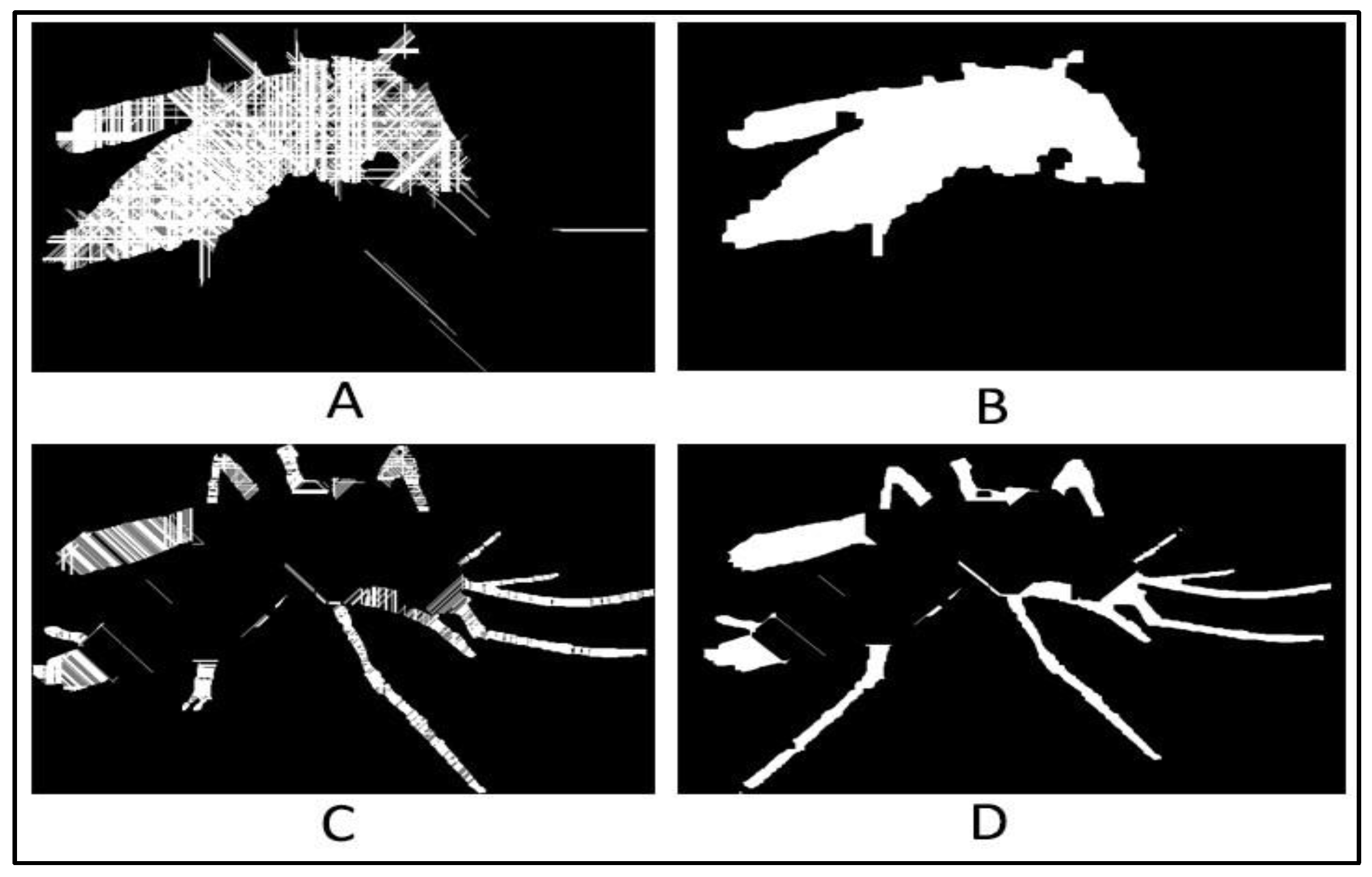
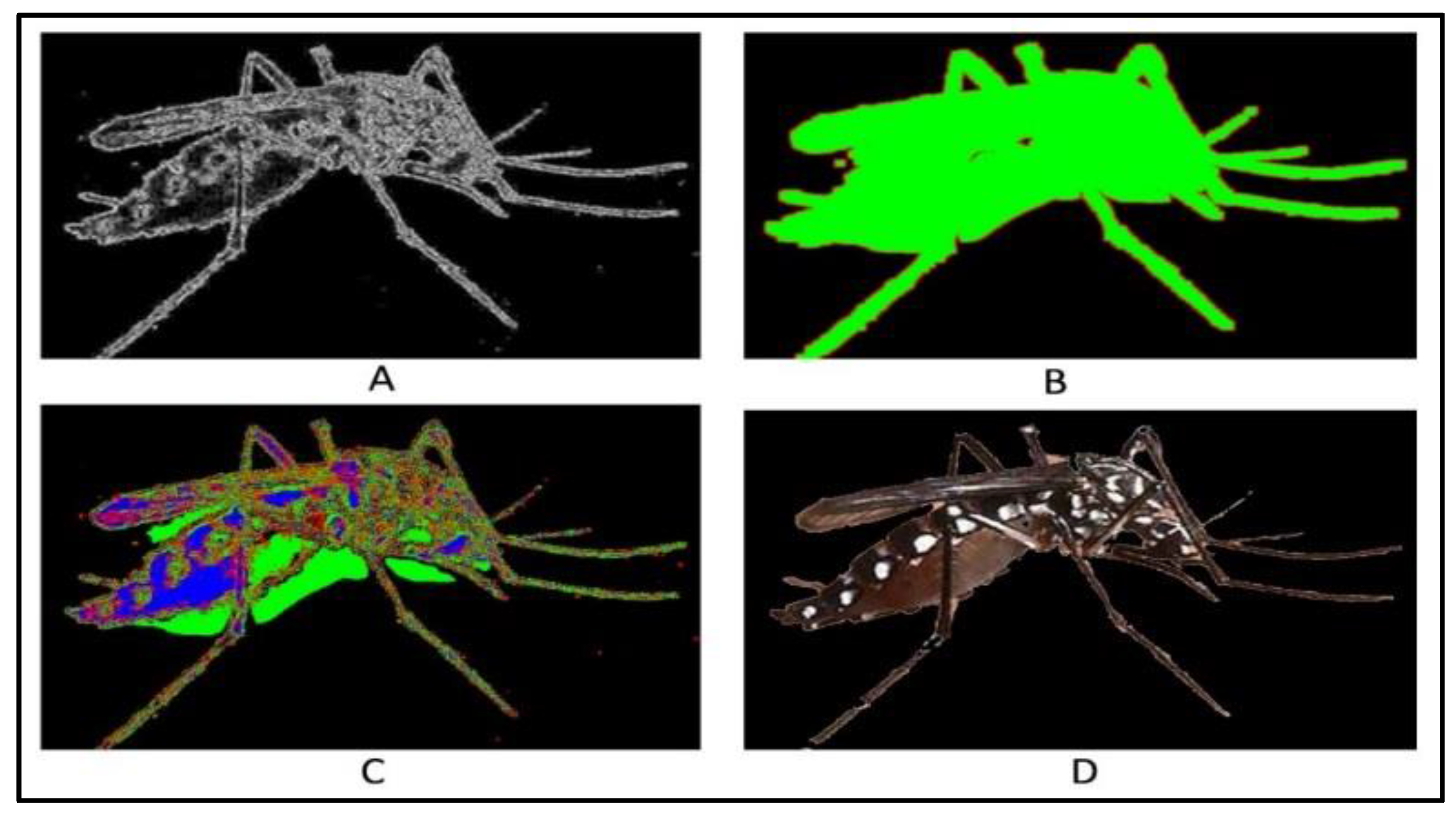
2.2. The Feature Extraction
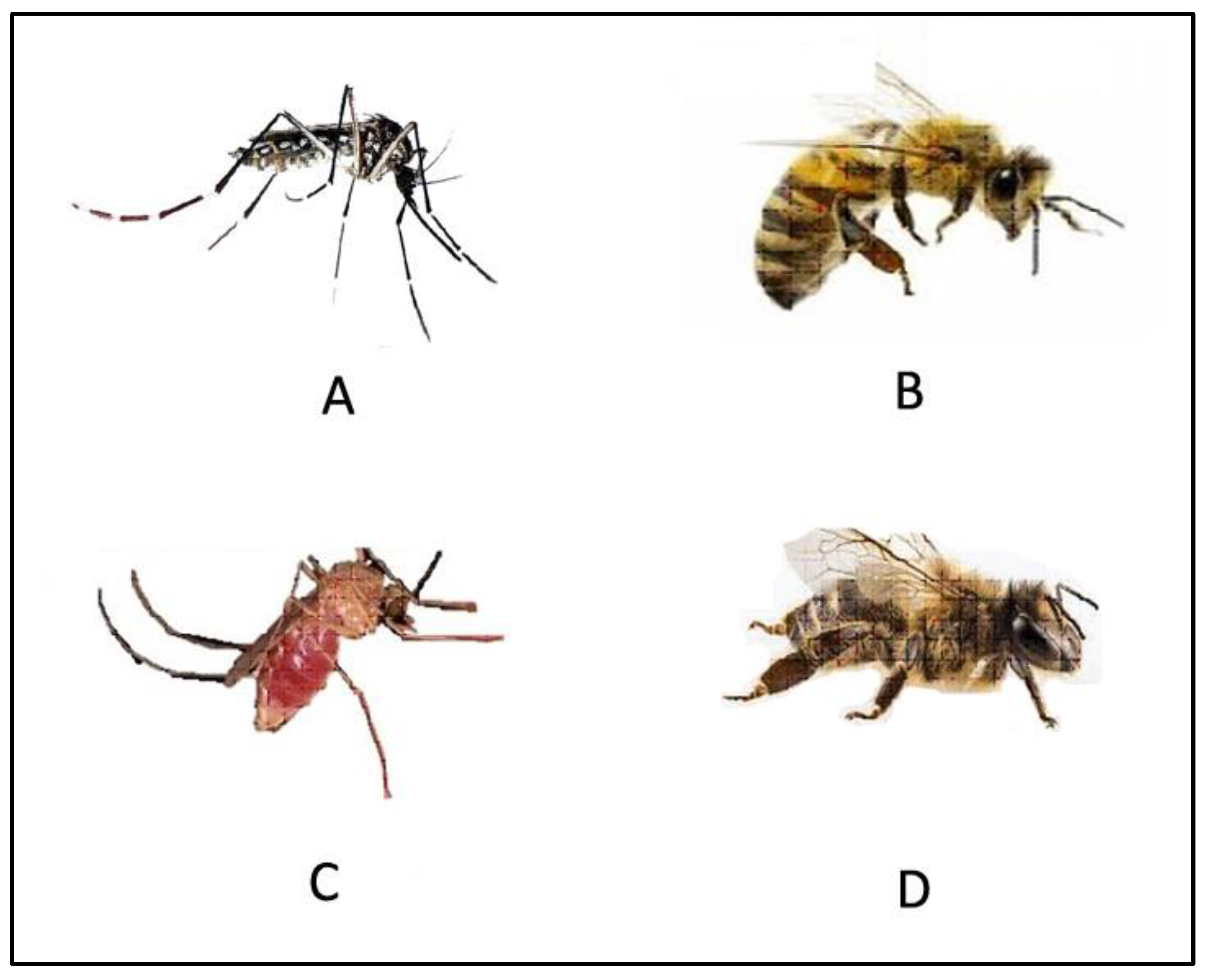
2.3. The Classification Process
3. Results
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- World Health Organization. Global Strategy for Dengue Prevention and Control 2012–2020; World Health Organization: Geneva, Switzerland, 2012. [Google Scholar]
- Bhatt, S.; Gething, P.W.; Brady, O.J.; Messina, J.P.; Farlow, A.W.; Moyes, C.L.; Drake, J.M.; Brownstein, J.S.; Hoen, A.G.; Sankoh, O. The global distribution and burden of dengue. Nature 2013, 496, 504–507. [Google Scholar] [CrossRef] [PubMed]
- Furuya-Kanamori, L.; Liang, S.; Milinovich, G.; Magalhaes, R.J.S.; Clements, A.C.; Hu, W.; Brasil, P.; Frentiu, F.D.; Dunning, R.; Yakob, L. Co-distribution and co-infection of chikungunya and dengue viruses. BMC Infect. Dis. 2016, 16. [Google Scholar] [CrossRef] [PubMed]
- Hadinegoro, S.R.S. Efficacy and Long-Term Safety of a Dengue Vaccine in Regions of Endemic Disease Integrated Analysis of Efficacy and Interim Long-Term Safety Data for a Dengue Vaccine in Endemic Regions. N. Engl. J. Med. 2015. [Google Scholar] [CrossRef] [PubMed]
- Roth, A.; Mercier, A.; Lepers, C.; Hoy, D.; Duituturaga, S.; Benyon, E.G.; Guillaumot, L.; Souares, Y. Concurrent outbreaks of dengue, chikungunya and Zika virus infections-an unprecedented epidemic wave of mosquito-borne viruses in the Pacific 2012–2014. Eurosurveillance 2014, 19, 20929. [Google Scholar] [CrossRef] [PubMed]
- Jasinskiene, N.; Coates, C.J.; Benedict, M.Q.; Cornel, A.J.; Rafferty, C.S.; James, A.A.; Collins, F.H. Stable transformation of the yellow fever mosquito, Aedes aegypti, with the Hermes element from the housefly. Proc. Natl. Acad. Sci. USA 1998, 95, 3743–3747. [Google Scholar] [CrossRef] [PubMed]
- Hay, S.I.; Snow, R.W.; Rogers, D.J. From predicting mosquito habitat to malaria seasons using remotely sensed data: Practice, problems and perspectives. Parasitol. Today 1998, 14, 306–313. [Google Scholar] [CrossRef]
- Zou, L.; Miller, S.N.; Schmidtmann, E.T. Mosquito larval habitat mapping using remote sensing and GIS: Implications of coalbed methane development and West Nile virus. J. Med. Entomol. 2006, 43, 1034–1041. [Google Scholar] [CrossRef] [PubMed]
- Khan, B.; Gaburro, J.; Hanoun, S.; Duchemin, J.-B.; Nahavandi, S.; Bhatti, A. Activity and Flight Trajectory Monitoring of Mosquito Colonies for Automated Behaviour Analysis. In Neural Information Processing, Proceedings of the 22nd International Conference, ICONIP 2015, Istanbul, Turkey, 9–12 November 2015; Springer: Germany, 2015; Part IV; pp. 548–555. [Google Scholar]
- Walton, C.; Sharpe, R.G.; Pritchard, S.J.; Thelwell, N.J.; Butlin, R.K. Molecular identification of mosquito species. Biol. J. Linn. Soc. 1999, 68, 241–256. [Google Scholar] [CrossRef]
- Sharpe, R.G.; Hims, M.M.; Harbach, R.E.; Butlin, R.K. PCR-based methods for identification of species of the Anopheles minimus group: Allele-specific amplification and single-strand conformation polymorphism. Med. Vet. Entomol. 1999, 13, 265–273. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Zhou, Z.; Shen, Z.; Yao, Q. Automated identification of mosquito (diptera: Culicidae) wingbeat waveform by artificial neural network. In Proceedings of the IFIP International Conference on Artificial Intelligence Applications and Innovations, Beijing, China, 7–9 September 2005.
- Moore, A.; Miller, R.H. Automated identification of optically sensed aphid (Homoptera: Aphidae) wingbeat waveforms. Ann. Entomol. Soc. Am. 2002, 95, 1–8. [Google Scholar] [CrossRef]
- Raymer, M.L.; Punch, W.F.; Goodman, E.D.; Kuhn, L.A.; Jain, A.K. Dimensionality reduction using genetic algorithms. IEEE Trans. Evol. Comput. 2000, 4, 164–171. [Google Scholar] [CrossRef]
- Wang, J.; Lin, C.; Ji, L.; Liang, A. A new automatic identification system of insect images at the order level. Knowl. Based Syst. 2012, 33, 102–110. [Google Scholar] [CrossRef]
- Bai, X.; Fang, Y.; Lin, W.; Wang, L.P.; Ju, B.-F. Saliency-based Defect Detection in Industrial Images by Using Phase Spectrum. IEEE Trans. Ind. Inform. 2014, 10, 2135–2145. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, L.P.; Lin, W. Conjunctive patches subspace learning with side information for collaborative image retrieval. IEEE Trans. Image Process. 2012, 21, 3707–3720. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Wang, L.P.; Lin, W. Semi-supervised biased maximum margin analysis for interactive image retrieval. IEEE Trans. Image Process. 2012, 21, 2294–2308. [Google Scholar] [CrossRef] [PubMed]
- Fu, X.J.; Wang, L.P. Data dimensionality reduction with application to simplifying RBF network structure and improving classification performance. IEEE Trans. Syst. Man Cybern. B Cybern. 2003, 33, 399–409. [Google Scholar] [PubMed]
- Mitra, V.; Wang, C.J.; Banerjee, S. Lidar detection of underwater objects using a neuro-SVM-based architecture. IEEE Trans. Neural Netw. 2006, 17, 717–731. [Google Scholar] [CrossRef] [PubMed]
- Ratle, F.; Camps-Valls, G.; Weston, J. Semi supervised Neural Networks for Efficient Hyperspectral Image Classification. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2271–2282. [Google Scholar] [CrossRef]
- Giorgio, G.; Fabio, R. Design of effective neural network ensembles for image classification purposes. Image Vis. Comput. 2001, 19, 699–707. [Google Scholar]
- Vanajakshi, L.; Rilett, L.R. A comparison of the performance of artificial neural networks and support vector machines for the prediction of traffic speed. In Proceedings of the 2004 IEEE Intelligent Vehicles Symposium, Parma, Italy, 14–17 June 2004; pp. 194–199.
- Byvatov, E.; Fechner, U.; Sadowski, J.; Schneider, G. Comparison of support vector machine and artificial neural network systems for drug/nondrug classification. J. Chem. Inf. Comput. Sci. 2003, 43, 1882–1889. [Google Scholar] [CrossRef] [PubMed]
- Wong, W.T.; Hsu, S.H. Application of SVM and ANN for image retrieval. Eur. J. Oper. Res. 2006, 173, 938–950. [Google Scholar] [CrossRef]
- Tong, S.; Koller, D. Support vector machine active learning with applications to text classification. J. Mach. Learn. Res. 2001, 2, 45–66. [Google Scholar]
- Lowe, D.G. Object recognition from local scale-invariant features. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999; pp. 1150–1157.
- Freedman, D.; Zhang, T. Interactive graph cut based segmentation with shape priors. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 21–23 September 2005; pp. 755–762.
- Itti, L.; Koch, C.; Niebur, E. A model of saliency-based visual attention for rapid scene analysis. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 1254–1259. [Google Scholar] [CrossRef]
- Vincent, O.R.; Folorunso, O. A descriptive algorithm for sobel image edge detection. In Proceedings of the Informing Science IT Education Conference (In SITE), Macon, GA, USA, 12–15 June 2009; pp. 97–107.
- Ta, D.N.; Chen, W.C.; Gelfand, N.; Pulli, K. Surftrac: Efficient tracking and continuous object recognition using local feature descriptors. In Proceedings of the Computer Vision and Pattern Recognition (CVPR), Miami, FL, USA, 20–26 June 2009; pp. 2937–2944.
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numerische Math. 1959, 1, 269–271. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | SVM Module | Kernel | Mathematical Expression for Kernel |
|---|---|---|---|
| SVM I | C-SVC | Linear | |
| SVM II | C-SVC | Radial Basis Function | |
| SVM III | nu-SVC | Radial Basis Function |
| Insect | Mosquitoes | Other Bugs | Accuracy % |
|---|---|---|---|
| Mosquitoes | 82 | 43 | 65.6 |
| Others | 18 | 57 | 76.0 |
| Recall % | 82.0 | 57.0 |
| Insect | Mosquitoes | Others Bugs | Accuracy % |
|---|---|---|---|
| Mosquitoes | 98 | 17 | 85.2 |
| Others | 2 | 83 | 97.6 |
| Recall % | 98.0 | 83.0 |
| Insect | Mosquitoes | Others Bugs | Accuracy % |
|---|---|---|---|
| Mosquitoes | 92 | 1 | 98.9 |
| Others | 8 | 99 | 92.5 |
| Recall % | 92.0 | 99.0 |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fuchida, M.; Pathmakumar, T.; Mohan, R.E.; Tan, N.; Nakamura, A. Vision-Based Perception and Classification of Mosquitoes Using Support Vector Machine. Appl. Sci. 2017, 7, 51. https://doi.org/10.3390/app7010051
Fuchida M, Pathmakumar T, Mohan RE, Tan N, Nakamura A. Vision-Based Perception and Classification of Mosquitoes Using Support Vector Machine. Applied Sciences. 2017; 7(1):51. https://doi.org/10.3390/app7010051
Chicago/Turabian StyleFuchida, Masataka, Thejus Pathmakumar, Rajesh Elara Mohan, Ning Tan, and Akio Nakamura. 2017. "Vision-Based Perception and Classification of Mosquitoes Using Support Vector Machine" Applied Sciences 7, no. 1: 51. https://doi.org/10.3390/app7010051
APA StyleFuchida, M., Pathmakumar, T., Mohan, R. E., Tan, N., & Nakamura, A. (2017). Vision-Based Perception and Classification of Mosquitoes Using Support Vector Machine. Applied Sciences, 7(1), 51. https://doi.org/10.3390/app7010051