1. Introduction
Humankind is facing an energy crisis. It is estimated that the Earth’s coal reserves will last only another hundred years, while petroleum and gas will last even less. This has led, in recent decades, to the development of green and alternative energy resources. One key requirement is that these technologies should save energy without reducing the quality of life or economic growth [
1,
2].
The use of renewable energy, such as solar energy, wind power, water power, tidal power, sea temperature difference, geothermal energy, and biomass energy is considered essential for sustainable development and is an active research area [
3,
4]. In Taiwan, wind and solar power are potentially the most important renewable energy sources. To keep noise levels low, wind power systems are only practical in the outskirts of cities, and for economic feasibility, they need to be built on a large scale [
5,
6]. Another source of renewable energy with great potential is solar energy; the amount of solar energy reaching the Earth in 40 min is equal to humankind’s annual energy requirement. Taiwan is located in the subtropical region close to the equator and it thus receives sufficient sunshine. Solar energy is a clean energy source, and we believe that developing solar energy is a reasonable solution to meeting Taiwan’s energy needs [
7,
8,
9].
Overview of the study: Tracking the sun’s trajectory in the sky and aligning the solar energy system with it can greatly improve the performance. Professor Ozcelik
et al. [
10] proposed to use a solar tracker which orients itself along the direction of the sunlight, and the solar tracker positions the panel in a hemispheroidal rotation to track the movement of the sun and thus increase the total electricity generation. Roshan
et al. [
11] reported that using tracking functional solar cells can increase the output by 50% compared to a fixed system. This necessitates the use of a two-axis tracking system. The system needs to drive two sets of motors to control the angle of the solar panels, which increases hardware costs and electrical energy consumption. Professor Huang [
12] of Kaohsiung University of Applied Sciences has studied one-axial and two-axial tracking systems in detail. This article proposes the application of fuzzy control theory in a solar tracking system, which is fully automatic in a changing environment, and which takes into account meteorological changes and the external environment arising from a malfunction. This approach avoids cloudy skies, cloud cover, and unstable weather to reduce unnecessary energy loss. The database associated with the elevation and horizontal angle of the solar cells is used to achieve the best quality of the effect of charging the system.
3. Intelligent Fuzzy Logic Controller
Zadeh [
19] proposed a quantitative tool in 1965, which can be used to express an ambiguity concept, especially in the ambiguity of human language. Sugeno carried out further research in this area. The result of their work is the fuzzy logic controller (FLC), which has now become world famous [
20,
21,
22]. The main advantage of the FLC is that it can be applied in situations where the controlled body is too complex or difficult to be mathematically modeled. The design of the controller is based on a few fuzzy rules. Thus, the FLC is smart and user-friendly.
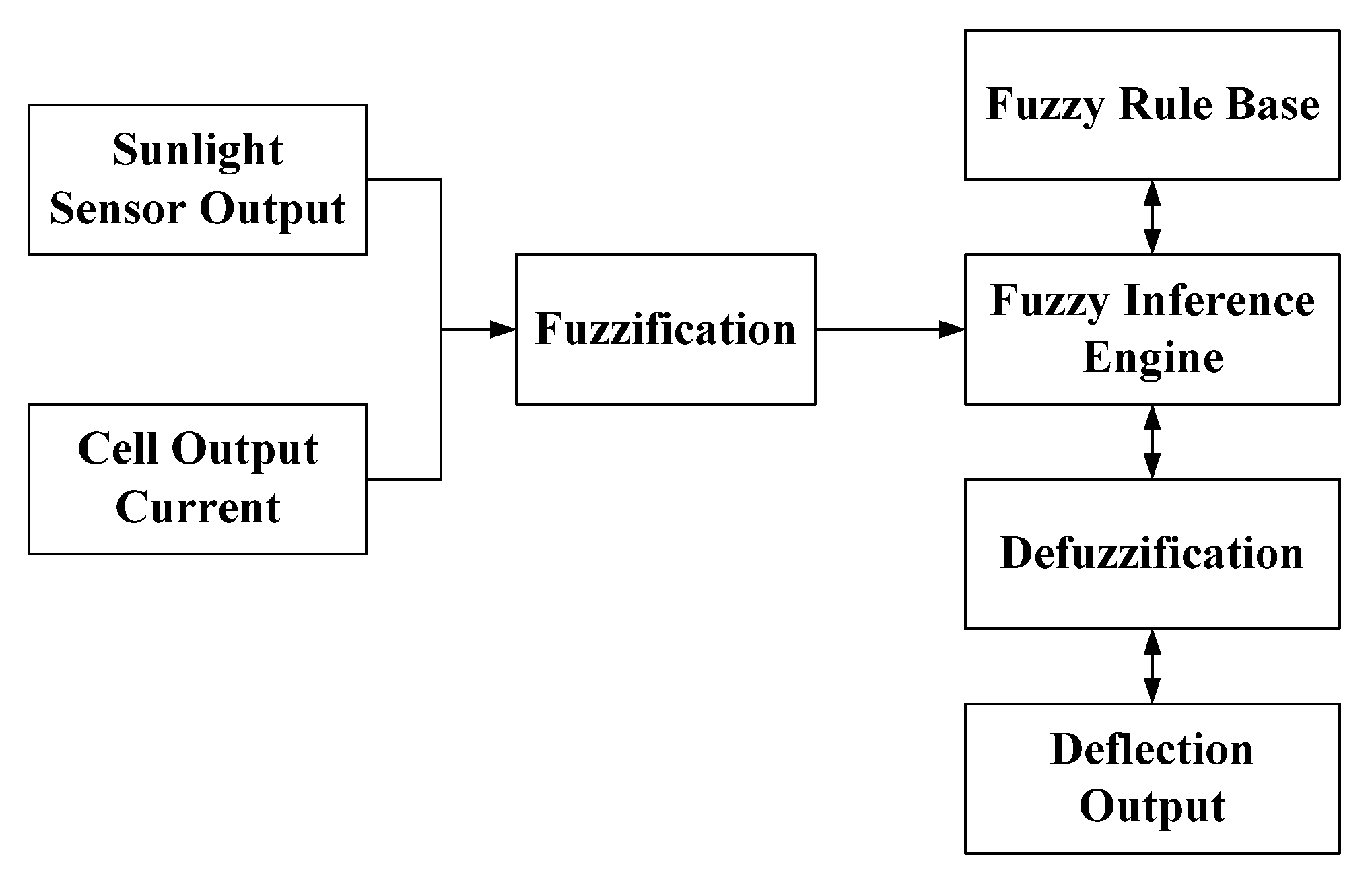
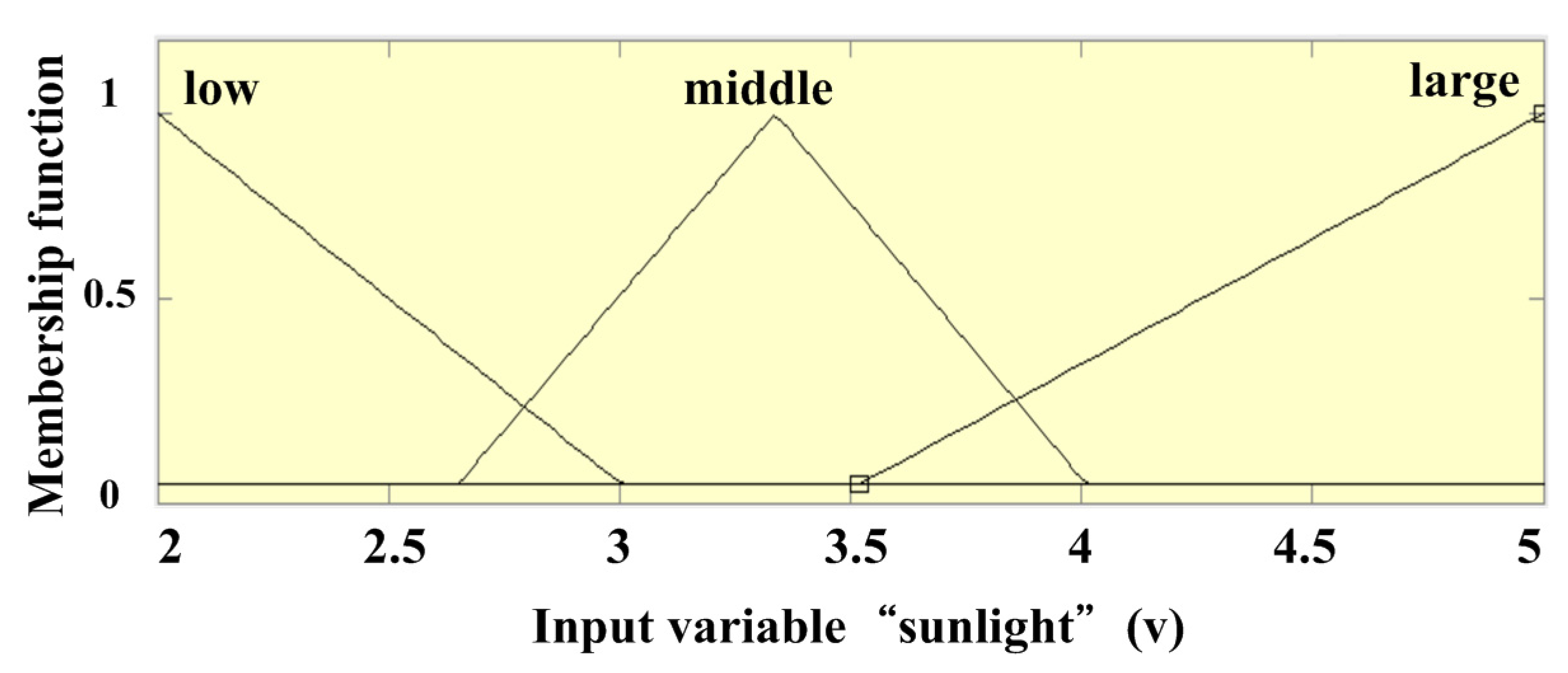
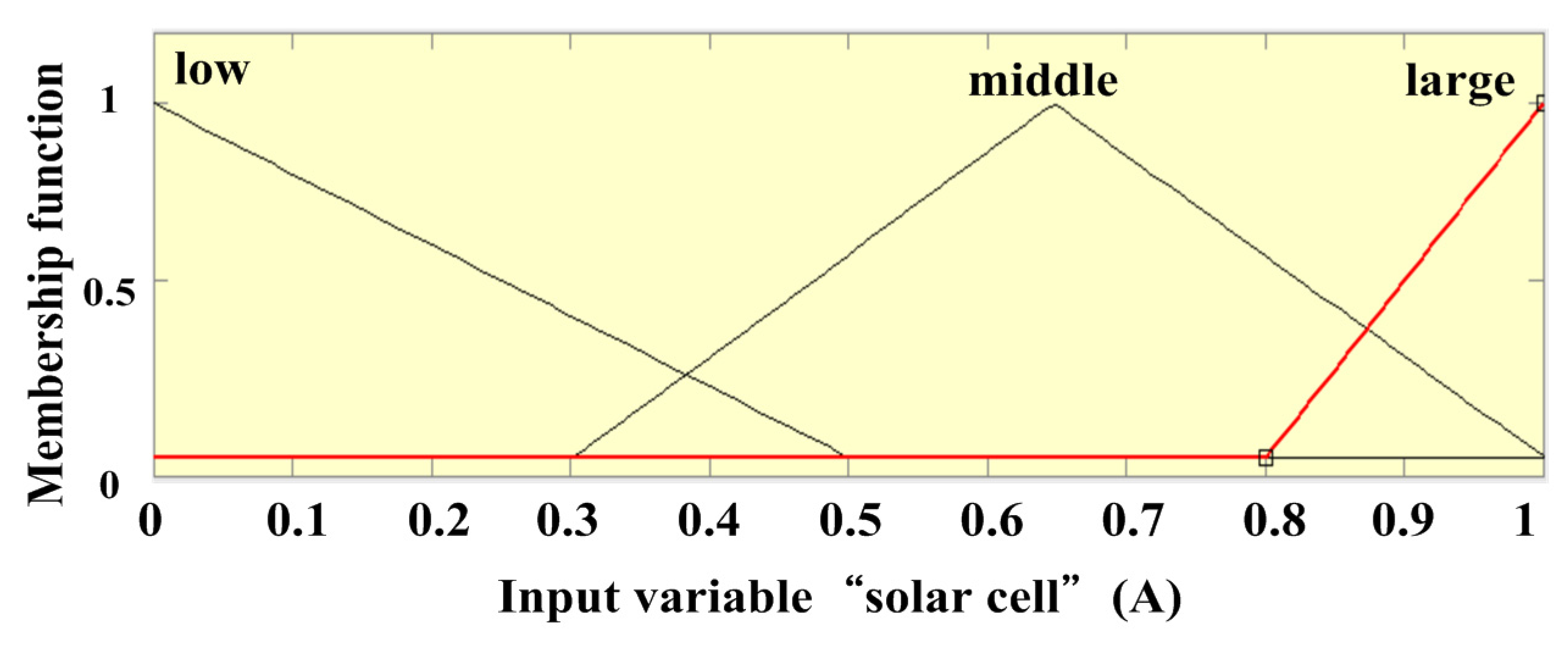
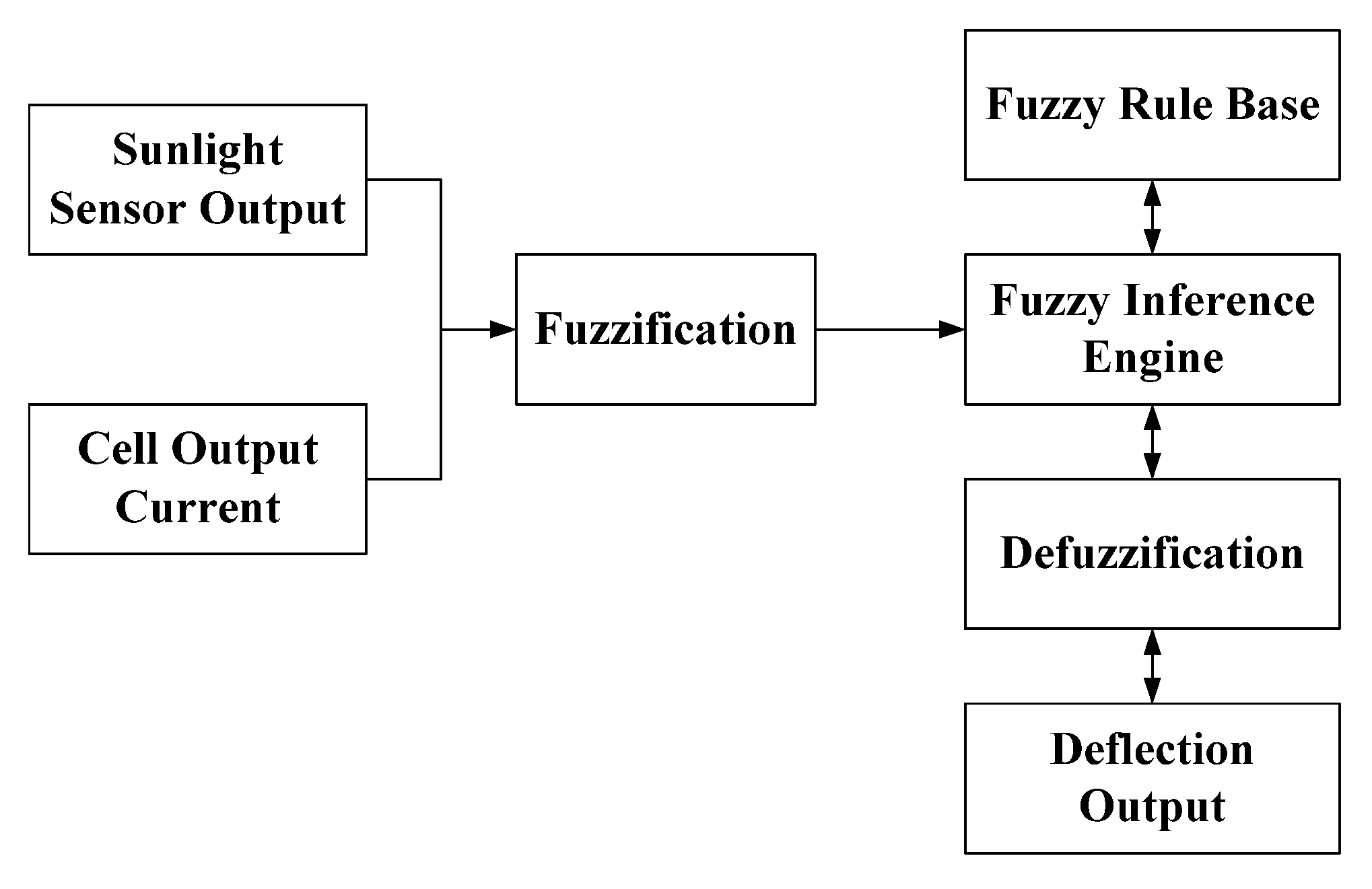
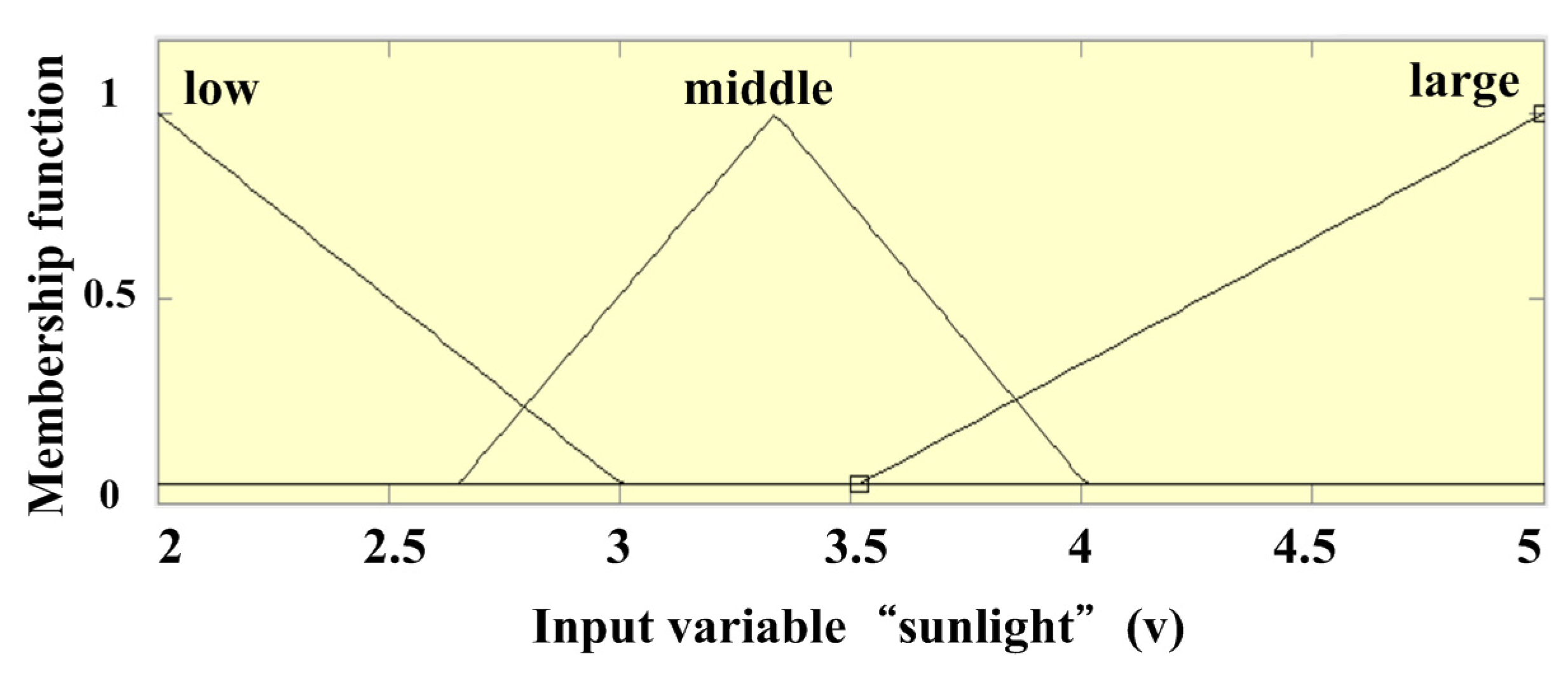
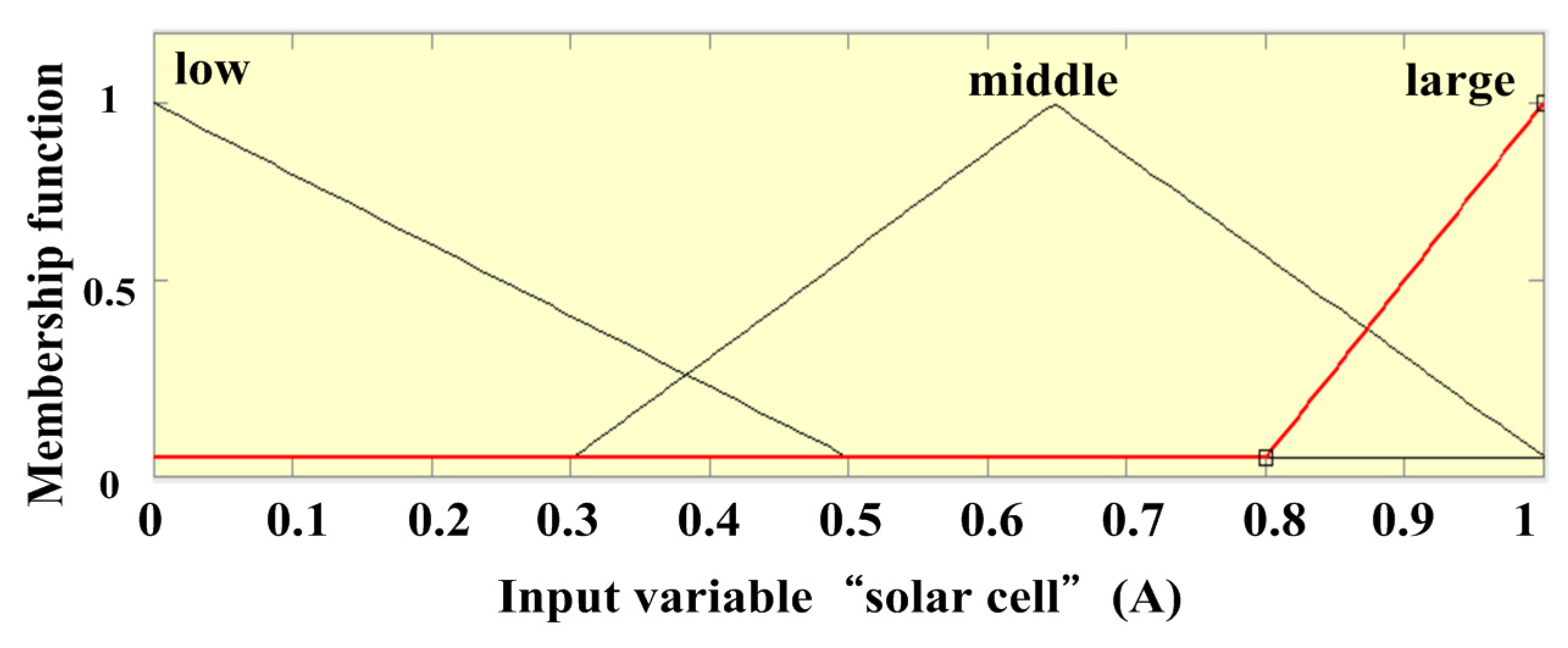
Generally speaking, the operation of the FLC can be divided into four areas: (1) fuzzification; (2) decision-making logic; (3) fuzzy knowledge base; and (4) defuzzification. Fuzzification is the process that converts numerical values into grades of membership of fuzzy set members. Hence, the fuzzification block matches the input data to determine how well the condition of each rule matches that particular input. A degree of membership function for each linguistic term applies to the input variable. We apply this system in the FLC solar panel output current and define the sunlight sensor output voltage values. The fuzzy inference engine provides the input values (as shown in
Figure 4). The use of fuzzy sets is defined, the membership functions are quantified, and continuous use of the triangular membership functions is made to reduce errors.
Table 2 presents the variables used for fuzzy logic control.
Table 3 shows the membership functions for the input variables (sunlight voltage and cell current).
Figure 5,
Figure 6 and
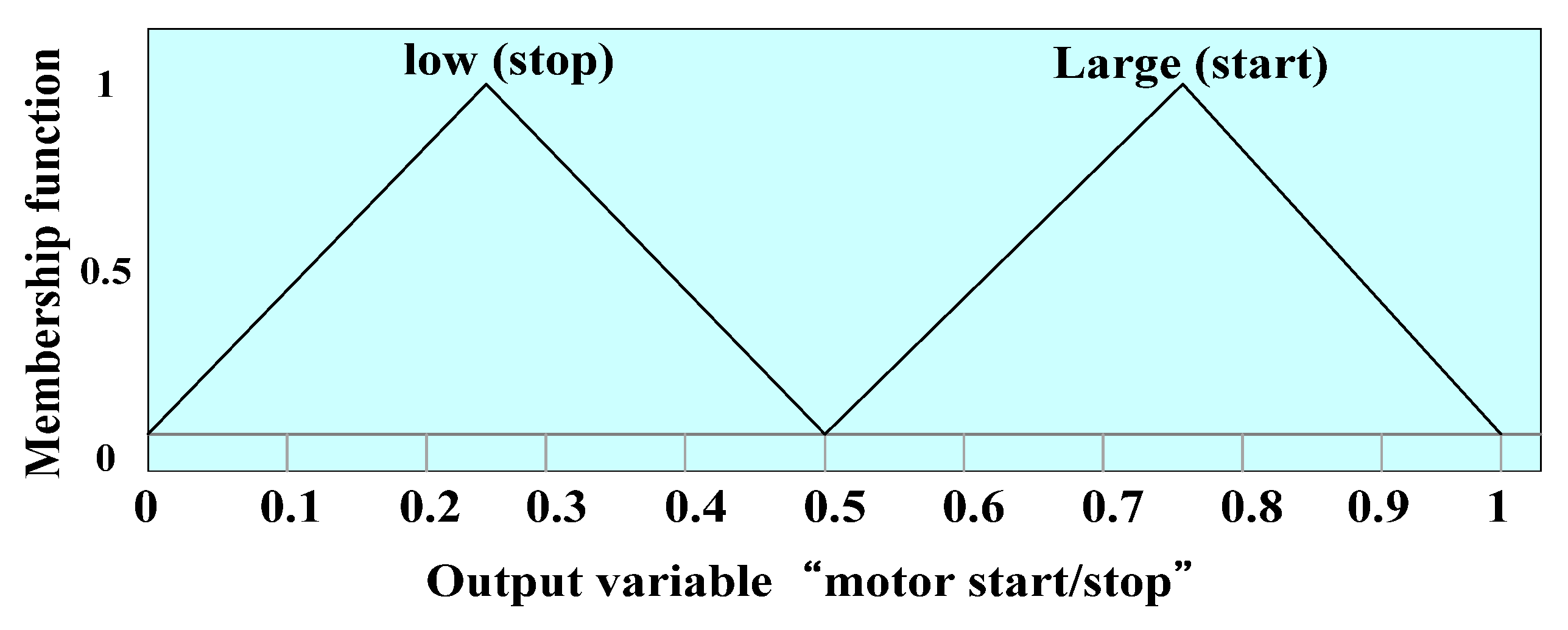
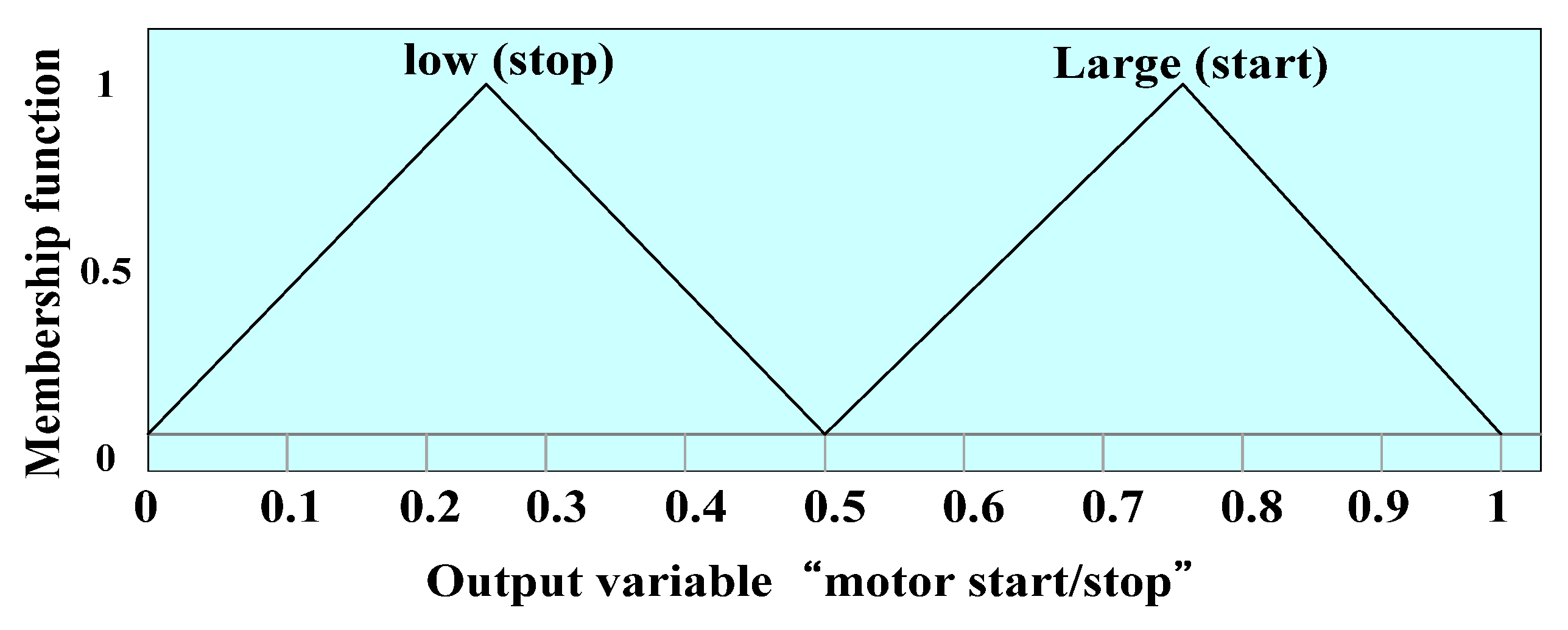
Figure 7 show the membership functions for the front and rear pieces. The front pieces of the system are the output current of the solar panel and the output voltage of photo detection (for the intensity of sunlight). The rear piece is the output for the rotation of the solar panels. By the triangle consisting of the ownership function, the function values of each point are between 0 and 1, corresponding to each input variable value, in which the horizontal coordinates for the input variable value is also known as the collection element. The ordinate represents the size of the element, also known as the degree of ownership. Among them, sunlight intensity can be divided into three states: large, medium and small; the solar panel current can be divided into three states: large, medium and small; and the output value can be divided into three states: large, medium and small.
The second step of the fuzzy controller design is to determine the form of fuzzy rules and list all the relevant rules. It refers to the relationship of solar cell output current and illumination of sunshine, and past data obtained from the literature, and relevant experts, to establish the following fuzzy rule base. The control rules are evaluated by an inference mechanism and represented as a set of: IF Sunlight sensor voltage is … and Cell current is … THEN the output will …
For example, Rule 1: IF sunlight sensor voltage is Small and Cell current is Small THEN the output is Low (stop). The linguistic variables used are Low (stop) and Large (start), as shown in
Table 4.
The third step of the fuzzy controller design is deciding what kind of fuzzy inference engine should be used. For this system, the maximum/minimum is selected as the synthetic fuzzy inference method [
23,
24,
25].
Figure 8 shows the operation of the fuzzy inference engine, which assumes that the input value (3.5 V) of sunlight intensity triggers three rules, and the one triggered by a high degree of fuzzy set intersections has been truncated (yellow area). For the first rule of fitness, the solar panel input current (0.377 A) triggered six rules. The one triggered by a high degree of fuzzy set intersections has been truncated (yellow area). The output of the fuzzy set is taken as the
Y-intersection and the fuzzy set of the final will be the union of the most fuzzy sets.
The whole process of computing algorithms uses Equations (1)–(3). The input variables are V (sunlight intensity), I (solar panel current), and the fitness of the front pieces (W). B is the fitness of the rear pieces after the piece for the department of fitness [
26]. The fitness of the front pieces is given by:
The fitness of rear pieces is given by:
where
i is number of rule,
and
are input, and
is output. For the entire rule set:
where
r is the number of triggered rules. This paper uses the focus-center method to defuzzify serial values as shown below:
The calculation time can be shortened using the topology method. The output area
Y is classified into
p numbers of discrete values, which can be expressed as
Y = {
y1,
y2,
y3, …,
yp}. Thus, the focus-center method can be shown as:
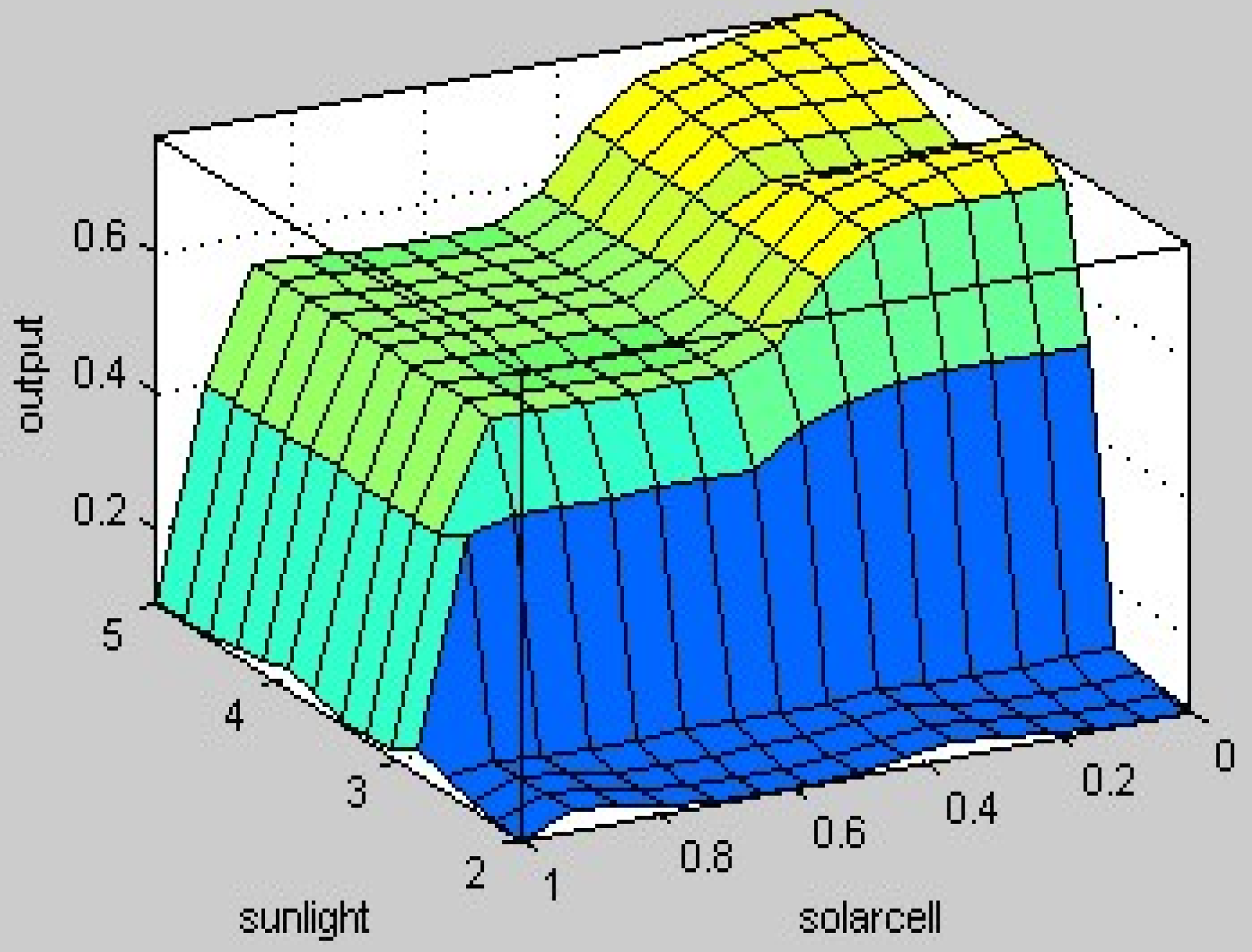
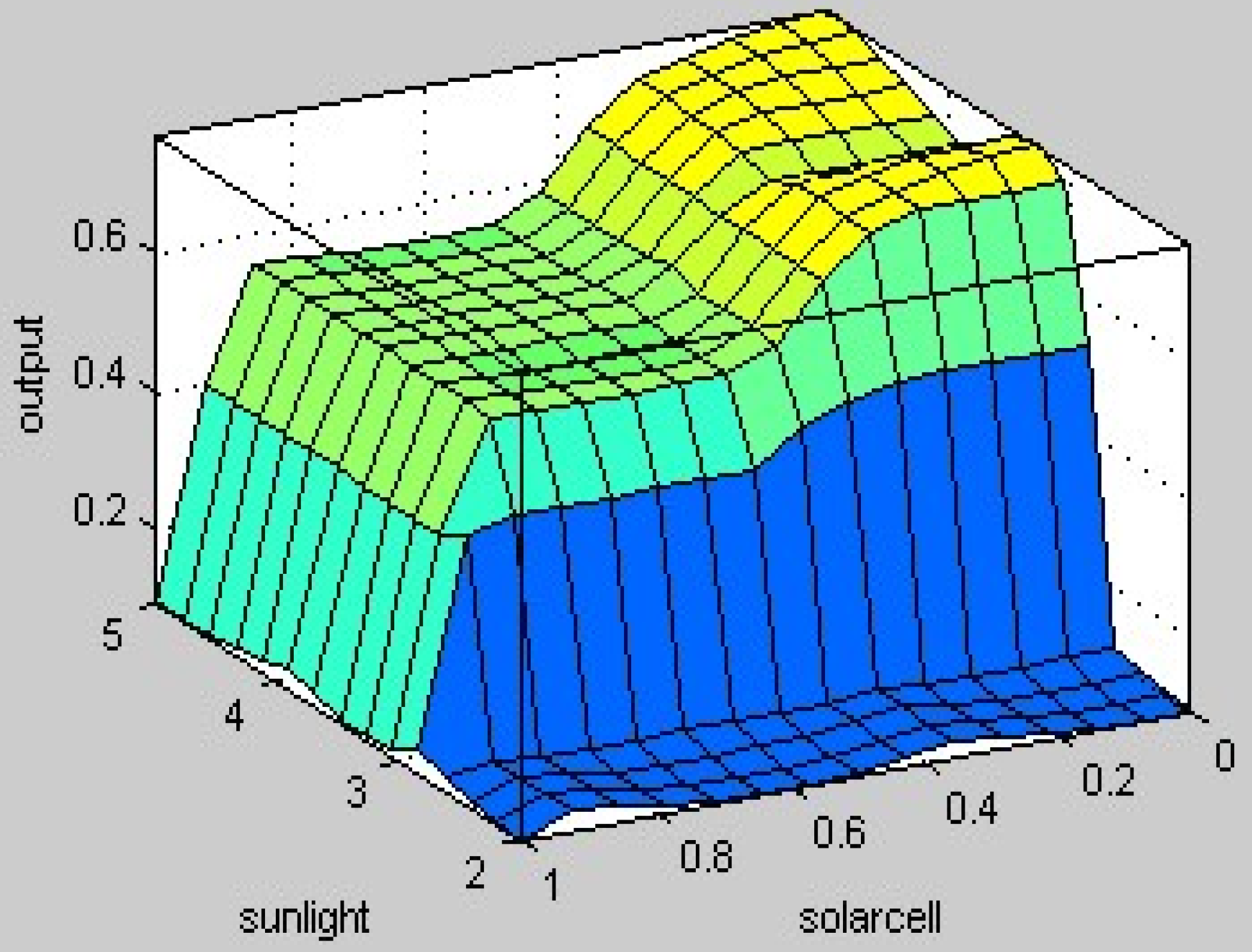
In this paper, we use MATLAB Fuzzy Logic Toolbox (R2012a, MathWorks, Natick, MA, USA, 2012) to find the fuzzy controller output value, as shown in
Figure 8, and determine its output value to determine the solar panels’ action. Then, we determine its output value to determine whether solar panels on the action. This research sets the fuzzy output value of 0.5 (or more) for the solar panels needed to track the sunshine. If below 0.5, rotating solar panels are not needed. Rotating solar panels are then calculated using the current database theory to get what is the angle of the sun.
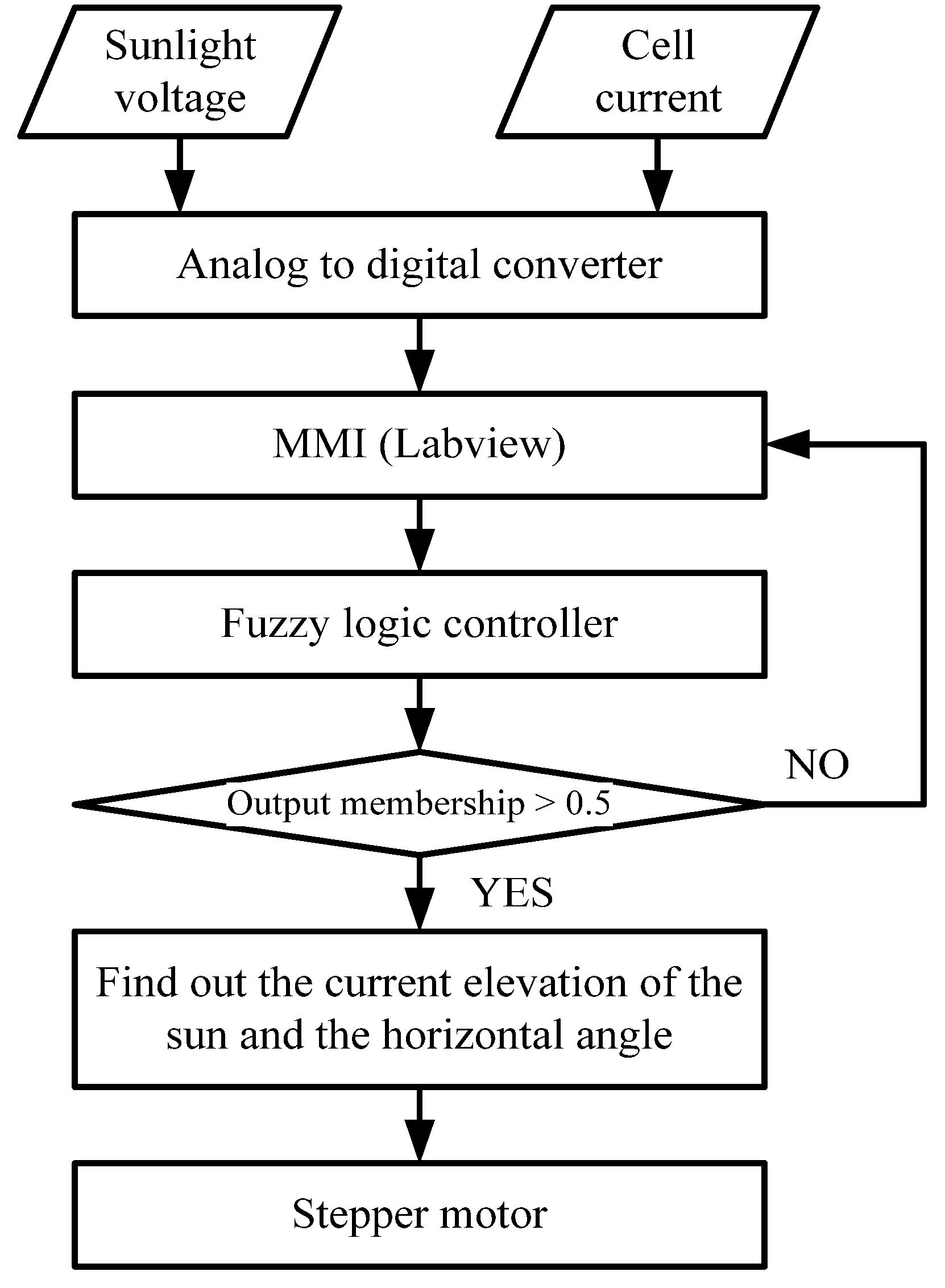
For axial tracking, the stepper motor is used as a driving source to rotate the solar panel in the direction of the sun. The position of the sun is determined by a fuzzy program with two input items (sunlight sensor voltage and solar cell current) and one output item (stepper motor). The sensor voltage and cell current reading is then converted into digital form using an analog-to-digital converter (ADC) and passed onto the FLC for aligning the panel in the direction of the sun. The FLC’s output is connected to the driver of the stepper motor to rotate the panel on one axis until it faces the sun through a gear box. The flowchart in
Figure 9 describes the control algorithm based on fuzzy logic, which is used to implement the system.
4. Sun Track System Software
4.1. System Programming
This paper proposes the design of system software using LabVIEW (2012, National Instruments, Austin, TX, USA, 2012) and MATLAB (R2012a, MathWorks, Natick, MA, USA, 2012). Real-time detection software is written in LabVIEW. The intensity of the sunlight and the solar panel output current are passed through an A/D converter and fed to the computer’s serial port to enter the PC. These two variable values, through the FUZZY program of MATLAB, determine whether the solar panels need to be rotated or not. If they do not need to be rotated, we return to LabVIEW for detection. If they need to be rotated, we start the search of the database. The current position of the sun and its horizontal angle is then found, and the angle values of X and Y are passed to the main LabVIEW program to calculate the required pulse number to drive the stepper motor. Through the data line of the Print Port, the Darlington circuit of the stepper motors is driven to rotate the stepper motor. The worm gear reducer enables the rotating solar panel to follow the sun’s path. Therefore, the solar cells receive the sunlight directly, resulting in an increased generating capacity.
4.2. Two-Axis Angle Control
In solar elevation angle control, the reducer is used vertically (5:1) to rotate the stepping motor’s downwards. This changes the y-axis height and the elevation angles α, because an increase in the y-axis results in a circular motion. This experiment thus uses a horizontal slide to mitigate this issue. The solution involves installing a mobile slide on the bottom of the elevator base, which changes its circumferential force and improves the base by changing its elevation angle α. The stepper motors are insufficient to meet the elevator’s high torque requirement, which necessitates the use of a 9:1 gear.
The angle is calculated using the following equation:
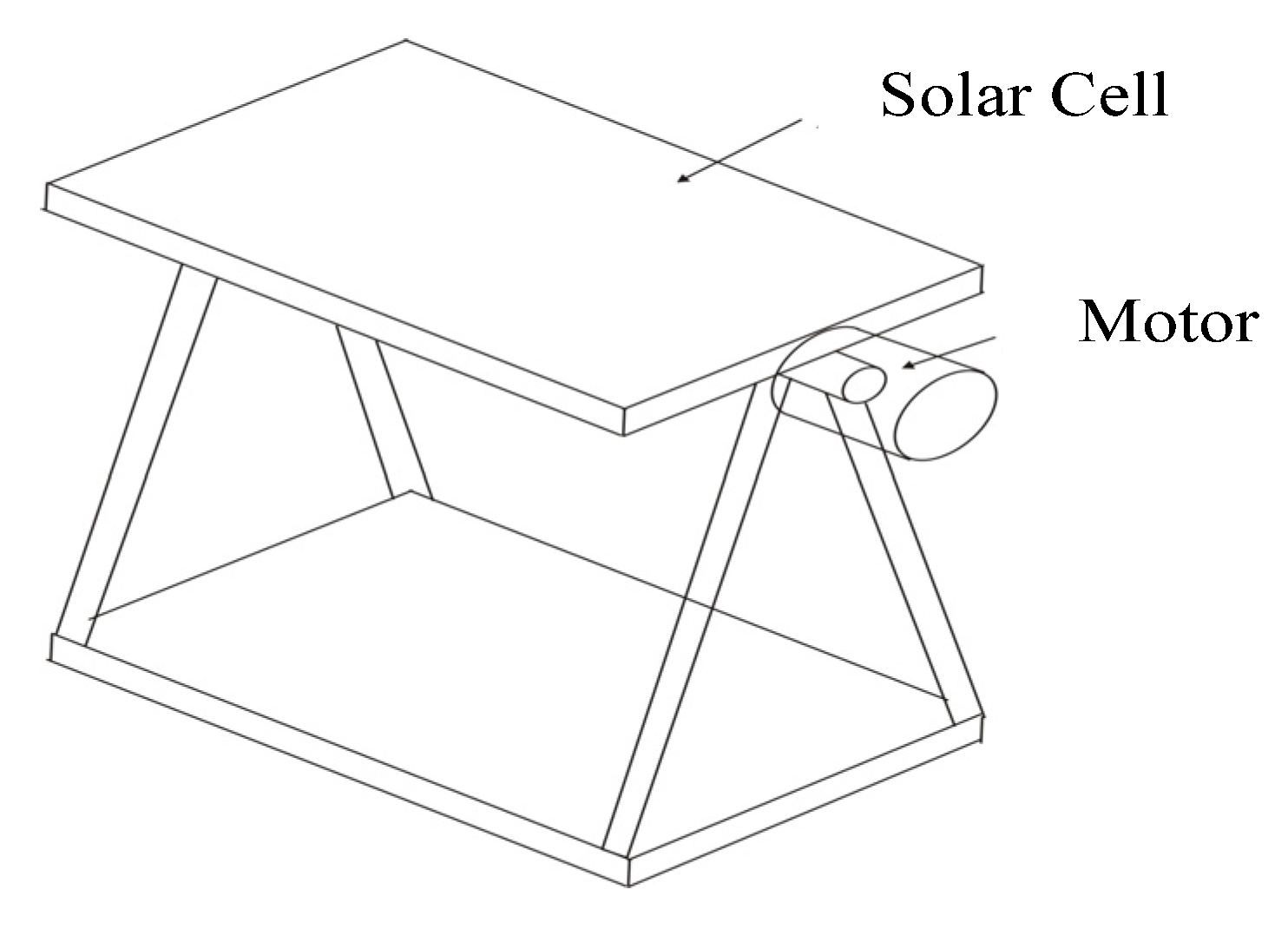
The installed solar panels are connected to the reducer’s output side (30:1) and then directly to the stepper motor from the power side of the reducer. The reducer can accurately control the solar panels and guard them against wind and vibrations (
Figure 10).
In this study, the two-phase stepper motor controls the angle of excitation. The value is 0.9 degrees per step, plus gear (30:1); therefore, for every step, the stepper motor controls the angle of the solar panels by 0.03 degrees. The horizontal angle control of the system can be expressed using the following relation:







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}