1. Introduction
As an essential equipment in a fully-mechanized coal mining working face [
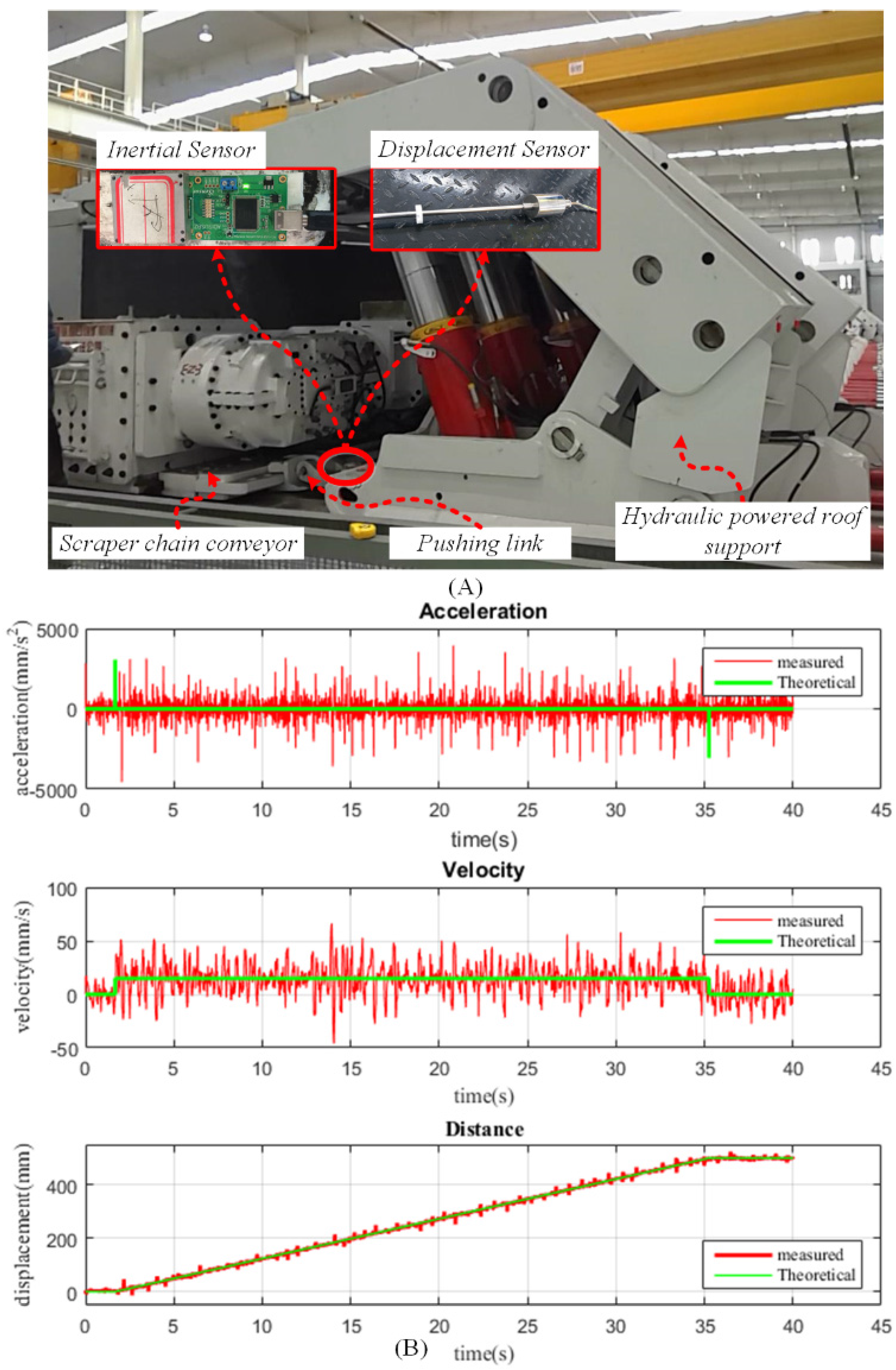
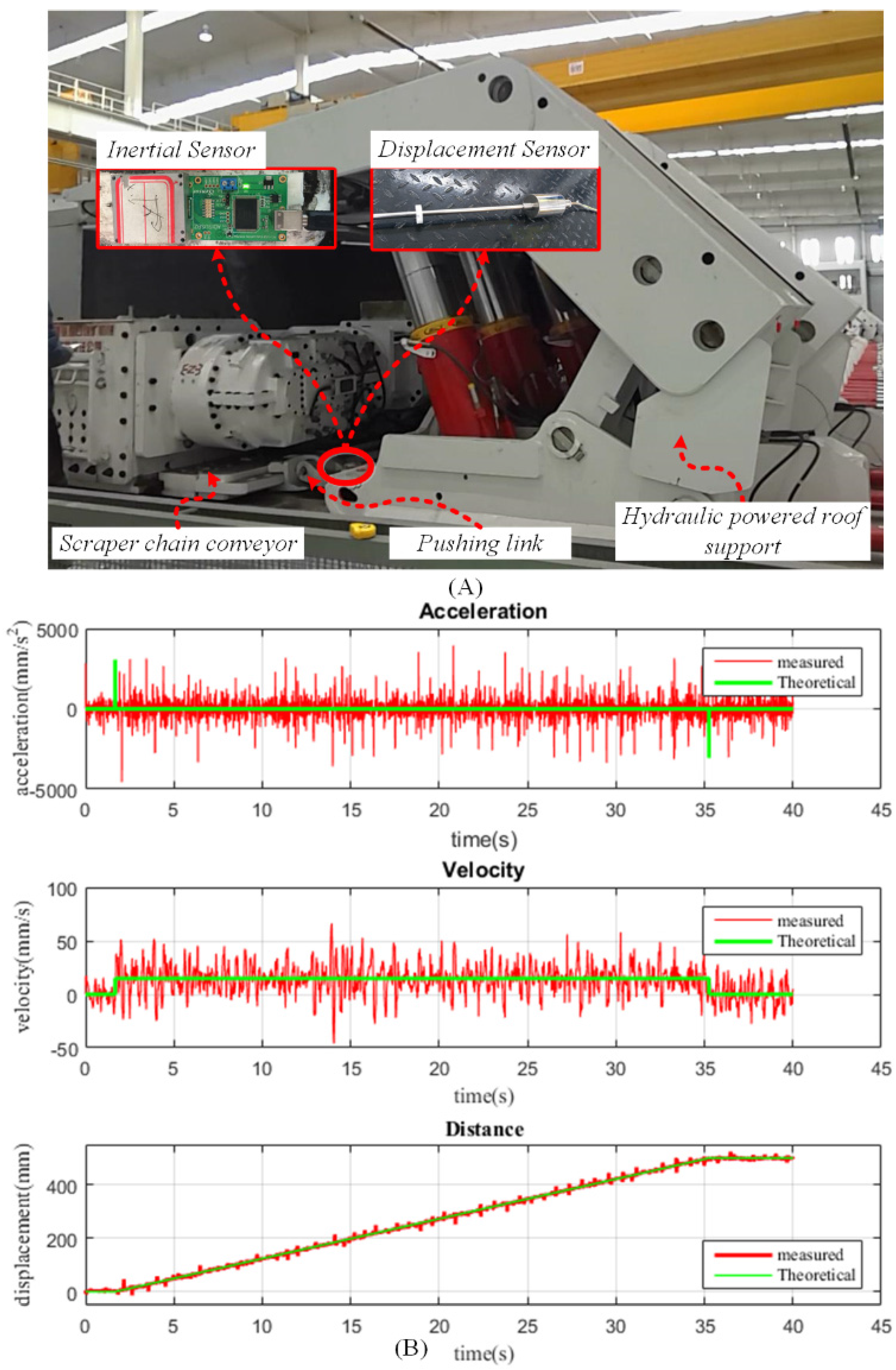
1], a hydraulic powered roof support connects with the scraper chain conveyor through the pushing link. Since the cutting machine rides on the scraper chain conveyor, it is evident that the straightness of the scraper chain conveyor directly affects the working efficiency of cutting machine [
2], while the straightness is determined by the pushing distance, which is produced by the hydraulic powered roof support. The pushing distance is defined as the distance that the pushing link moves forward or backward. At present, the pushing distance is measured by a displacement sensor which is embedded in the hydraulic pushing cylinder to avoid being exposed in extreme conditions.
However, there are some fatal drawbacks of this approach. The displacement sensor, embedded into the hydraulic pushing cylinder, is non-replaceable due to the cumbersome mechanical structure and its unmaintainable installation method. As a consequence, it will be totally disabled once the sensor is broken, and the sensor cannot be replaced until all of the mining tasks are finished. Moreover, the method has poor accuracy, because the pushing distance is obtained either by using the pushing length of the hydraulic pushing cylinder directly, or calculated via trigonometry transformation. Both of the above methods produce large system errors. Thus, a novel pushing distance estimation approach, with comprehensive consideration of both estimation accuracy and extreme condition constraints, is much needed.
Inertial sensors are widely applied in navigation [
3], robotics [
4], and virtual reality [
5], etc., due to their positive characteristics, such as being lightweight, their low power consumption, portability, and self-contained nature [
6]. They were originally proposed for aircraft navigation systems in the 1930s [
7]. Later, inertial sensors are growing popular both in scientific research and entertainment technologies. The scientific studies are not limited to applications [
8], but also to their performance [
9]. Research on their performance improvement [
10] and calibration analysis [
11] provide more accurate estimation technologies for these interesting applications, e.g., equine lameness examinations [
12], human arm motion tracking [
13], and quantifying the evaluation of warfighter performance [
14], etc. Although inertial sensors are successfully used in many fields, the application on displacement estimation is still a great challenge due to the cumulative errors [
15]. As improvements in inertial sensors and rapid development of signal processing methods continue, inertial sensors also provide a possibility for operation in some extreme conditions without accuracy requirements, e.g., a fully-mechanized coal mining working face.
The Kalman filter was proposed for linear filtering and prediction problems by Kalman in 1960 [
16]. It is a state estimator based on a state-space model [
17]. The Kalman filter is frequently used for inertial information processing due to uncertainty problems [
18], including position estimation [
19], as well as rotation estimation [
20]. For non-linear problems, researchers also proposed some mutation of the Kalman filter, e.g., the extended Kalman filter [
21], unscented Kalman filter [
22], etc. In recent years, the Kalman filter has also been applied in intelligent computation [
23], as well as information fusion through distributed [
24] or parallel [
25] approaches. In addition to these applications, the Kalman filter contributes to magnetometer calibration [
26], moving object tracking [
27], and satellite attitude determination [
28], as well. Unfortunately, the estimation performance of the Kalman filter is greatly influenced by the selection of the processing covariance matrix
Q and the observation (measurement) covariance matrix
R [
29], and the research on tuning
Q and
R is very valuable [
30]. Thus, optimization algorithms should be applied to obtain better estimation performance through tuning the covariance.
Optimization algorithms have significant influence on computational performance. Recently, some interesting and efficient naturally-inspired optimization algorithms have been proposed. Krill herd (KH) was proposed by Gandomi and Alavi in 2012 [
31]. Based on the innovation, other algorithms, such as chaotic KH [
32], stud KH [
33], hybrid KH [
34], chaotic particle-swarm KH [
35], multi-stage KH [
36], and opposition-based KH [
37], etc., are successively developed. These algorithms are so efficient and flexible that they can be improved either by internal improvement, such as introducing a new migration operator [
38] and a new information exchange process [
39], or by combining other algorithms together, such as quantum-behaved particle swarm algorithms [
40] and cuckoo search algorithms [
41], etc. Monarch butterfly optimization (MBO) [
42] and MBO-based algorithms [
43,
44] are also recently developed meta-heuristic algorithms, which simulate the migration of monarch butterflies. Other similar algorithms, moth search algorithms [
45], earthworm optimization algorithms [
46], cuckoo search algorithms [
47,
48], bat algorithms [
49,
50] and firefly algorithms [
51,
52], etc., also simulate the natural motion process and have contributed greatly to intelligent optimization algorithms in recent years.
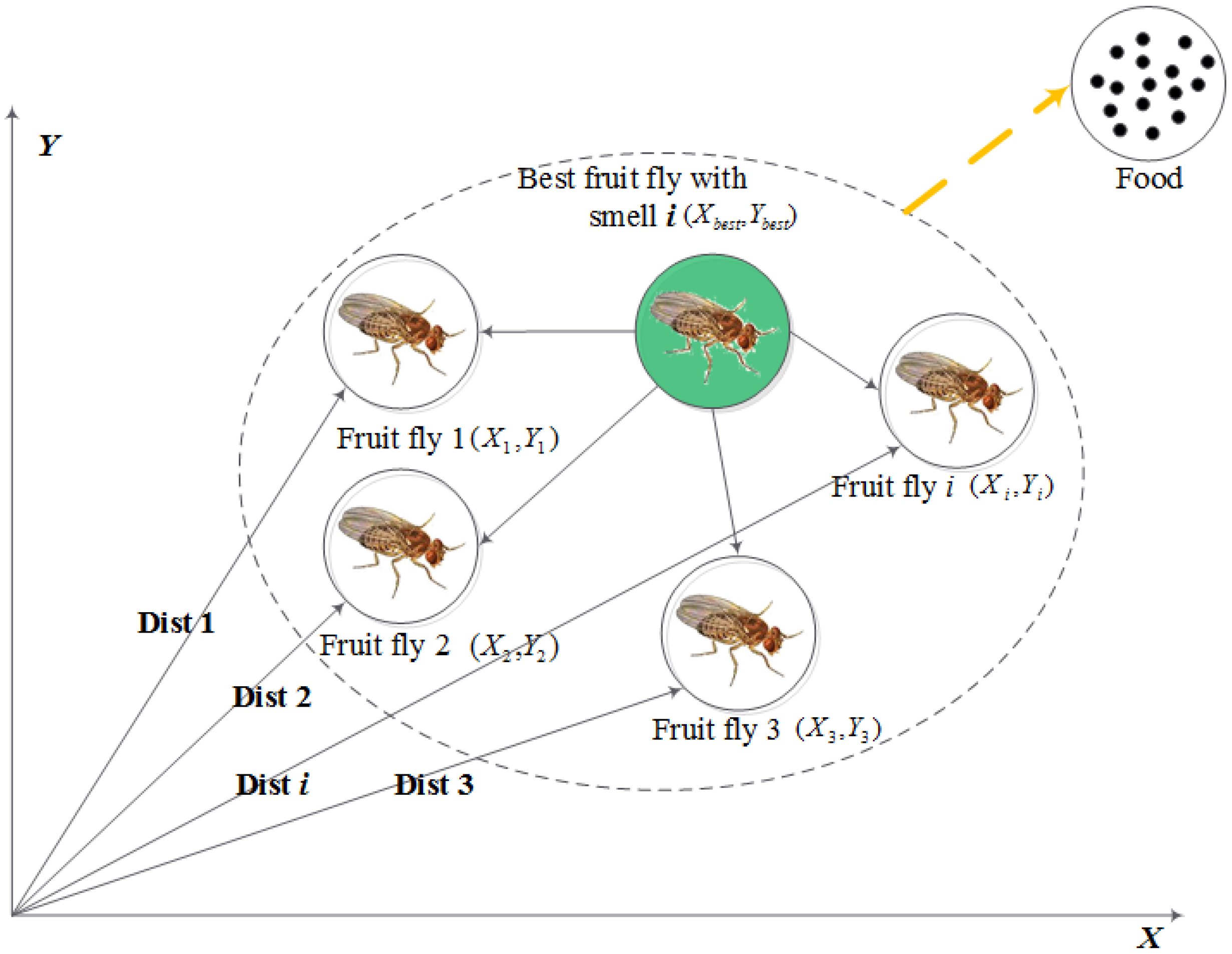
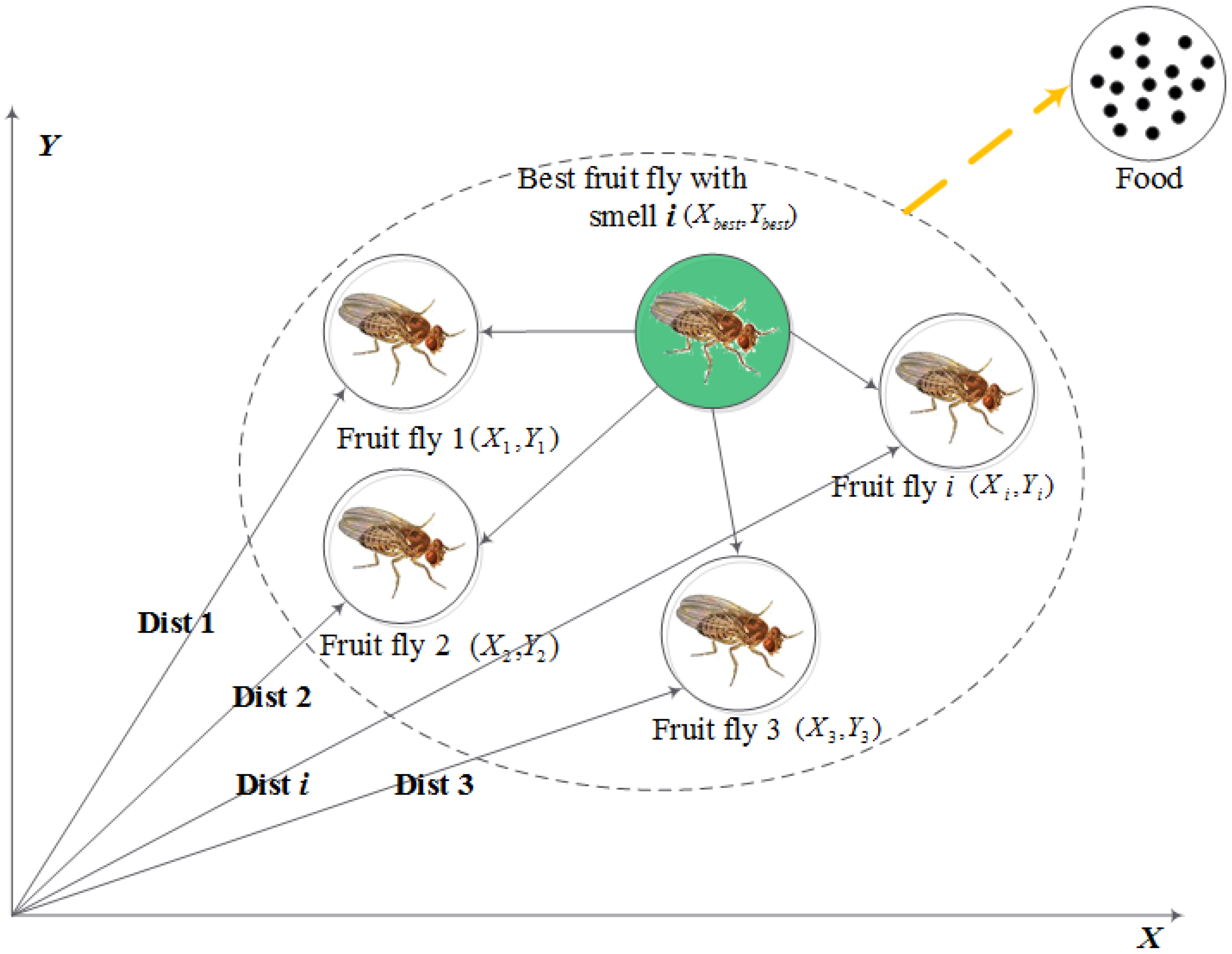
Among these intelligent optimization algorithms, the fruit fly optimization algorithm (FOA) is a brand new intelligent optimization algorithm, which has a rapid convergence rate and easy implementation, proposed by Pan in 2012 [
53]. FOA simulates the intelligent foraging behavior of a fruit fly group in a food-finding process [
54], which combines olfactory and vision searching methods [
55]. It has been widely applied in financial parameter optimization [
56], forecasting [
57], scheduling [
58], etc. However, like other optimization algorithms, the basic FOA has the possibility of falling into local extremes, and it is difficult to jump out [
55].
Bearing the above observations in mind, inertial sensors are utilized to measure the inertial information of a pushing link, and an improved fruit fly algorithm optimized Kalman filter (FOA-KF) is proposed to process the inertial information. To make it easy for jumping out of the local extreme, the basic FOA is modified by adding a perturbation intensity through a predict-update mechanism when falling into a local extreme. A simulation and application for the pushing distance estimation proves the effectiveness and superiority of the proposed method.
The rest of this paper is organized as follows: In
Section 2, preliminaries of Kalman filter and basic FOA are presented. In
Section 3, the framework of proposed method is described and an improved FOA is applied to optimize the Kalman filter covariance. In
Section 4, an artificial inertial signal is estimated to verify the effectiveness and superiority of the proposed method, and an application of pushing distance estimation is performed. Some conclusions and outlooks are summarized in
Section 5. Bearing the above observations in mind, an inertial sensor is utilized to measure the inertial information of the pushing link, and an improved fruit fly algorithm optimized Kalman filter (FOA-KF) is proposed to process the inertial information. To make it easier for jumping out of the local extreme, the basic FOA is modified by adding a perturbation intensity through a predict-update mechanism when falling into a local extreme. A simulation and application for the pushing distance estimation proves the effectiveness and superiority of the proposed method.
3. Proposed Method
In this section, an improved FOA (IFOA) is proposed to avoid falling into a local extremum. The IFOA is applied to tune the parameters of the Kalman filter, i.e., processing noise covariance and observation noise covariance . The whole procedure of pushing distance estimation based on the fruit fly algorithm-optimized Kalman filter (IFOA-KF) is presented.
3.1. The Proposed IFOA
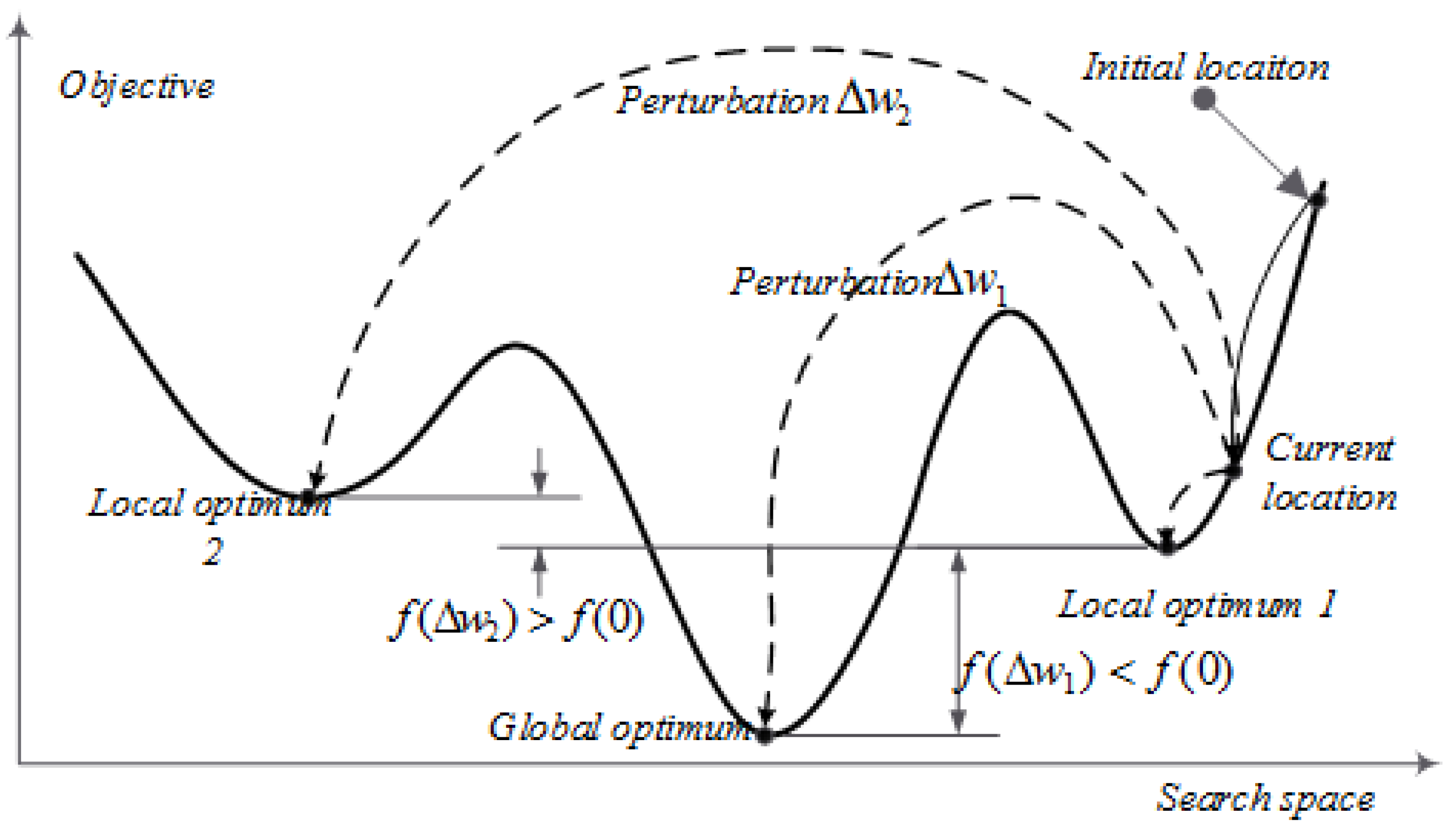
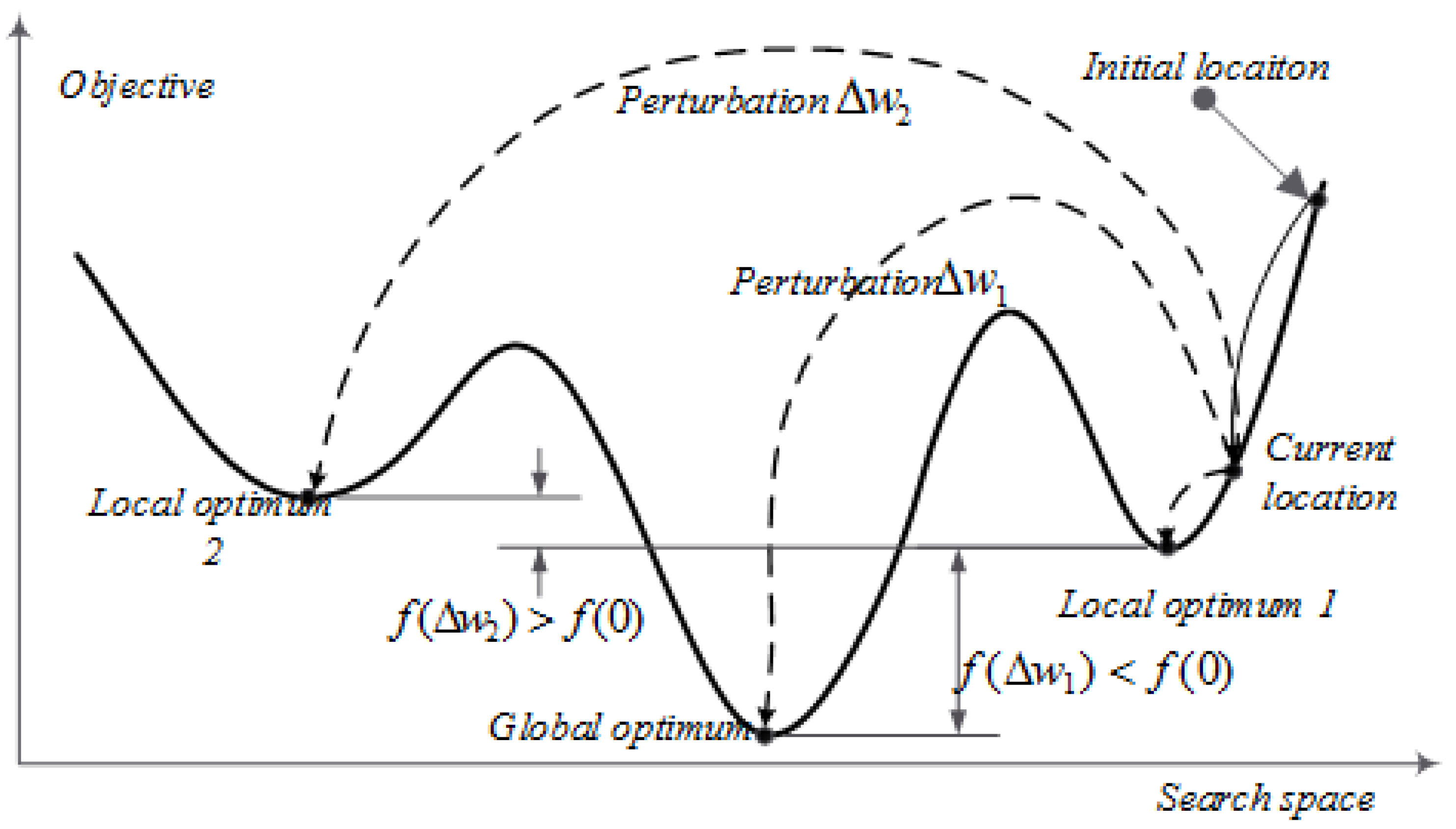
The basic FOA is very efficient in finding the global optimization, while it is a common problem to fall into local extremum. To tackle this problem, Wang [
59] adds a random perturbation to jump out of the local extremum, while the perturbation intensity is chosen randomly. Suppose that the basic FOA may fall into local optimum 1, as shown in
Figure 2: a perturbation with high intensity may change the current location to another local optimum 2. While an appropriate perturbation intensity may reach to global optimum.
In order to tackle this problem, the proposed IFOA utilizes a predict-update mechanism to determine if the perturbation intensity should be added or not. If the flag variable
is true, the proposed IFOA should add the perturbation and predict the next location. If the flag variable
is false, then go directly to the next step. To set the flag variable, the objective values with or without perturbation intensity should be compared. If the objective with perturbation intensity is better, then apply this perturbation intensity. If not, then set current perturbation intensity to zero, namely, without perturbation intensity. Thus, the perturbation intensity can be chosen via the following conditions:
where
is the objective function to be minimized. As shown above, if random perturbation
, and
, then the predicted random perturbation can be accepted and added to the current location, the next location may be a point near the global optimum or another local optimum. If random perturbation
, and
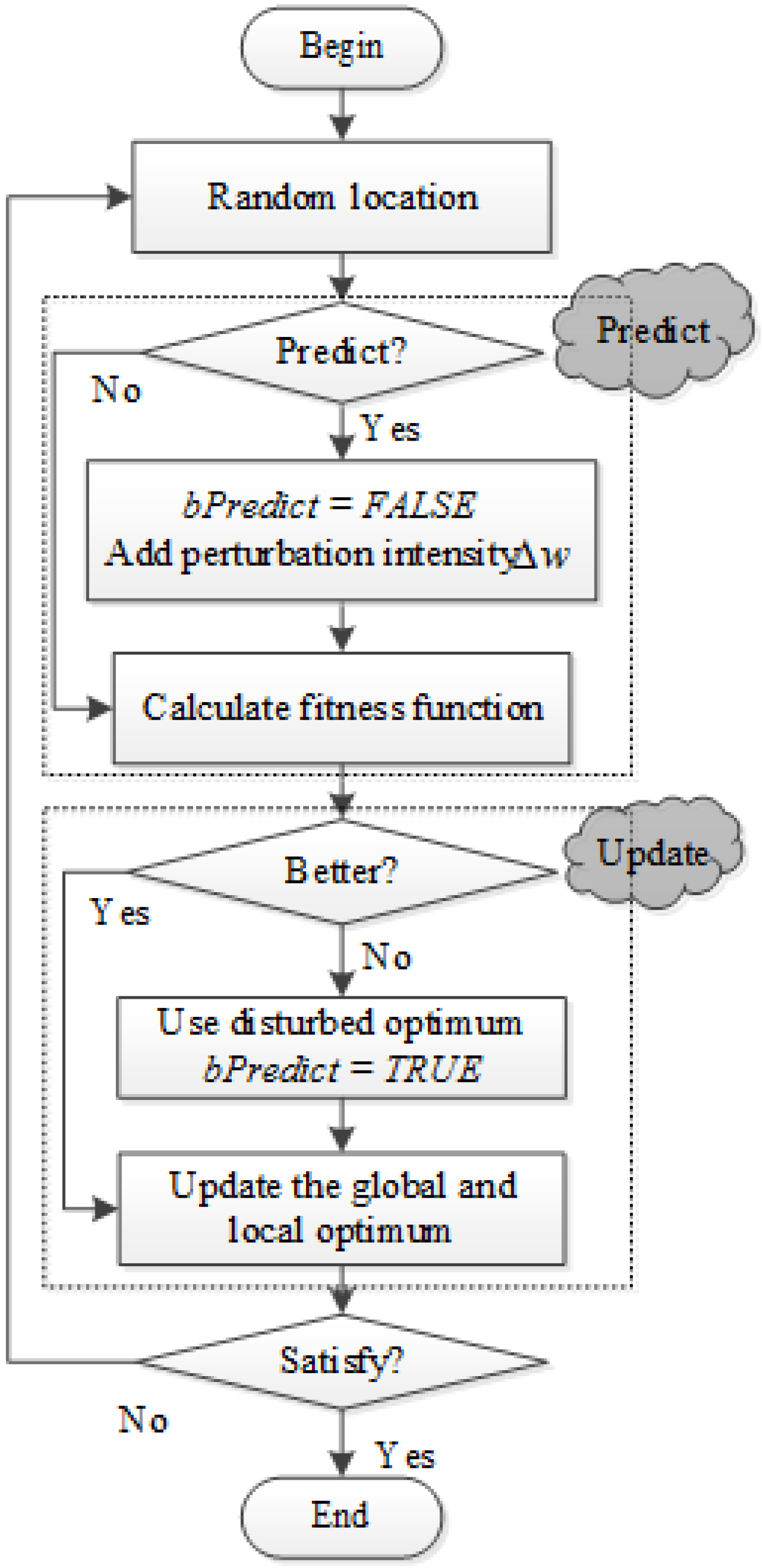
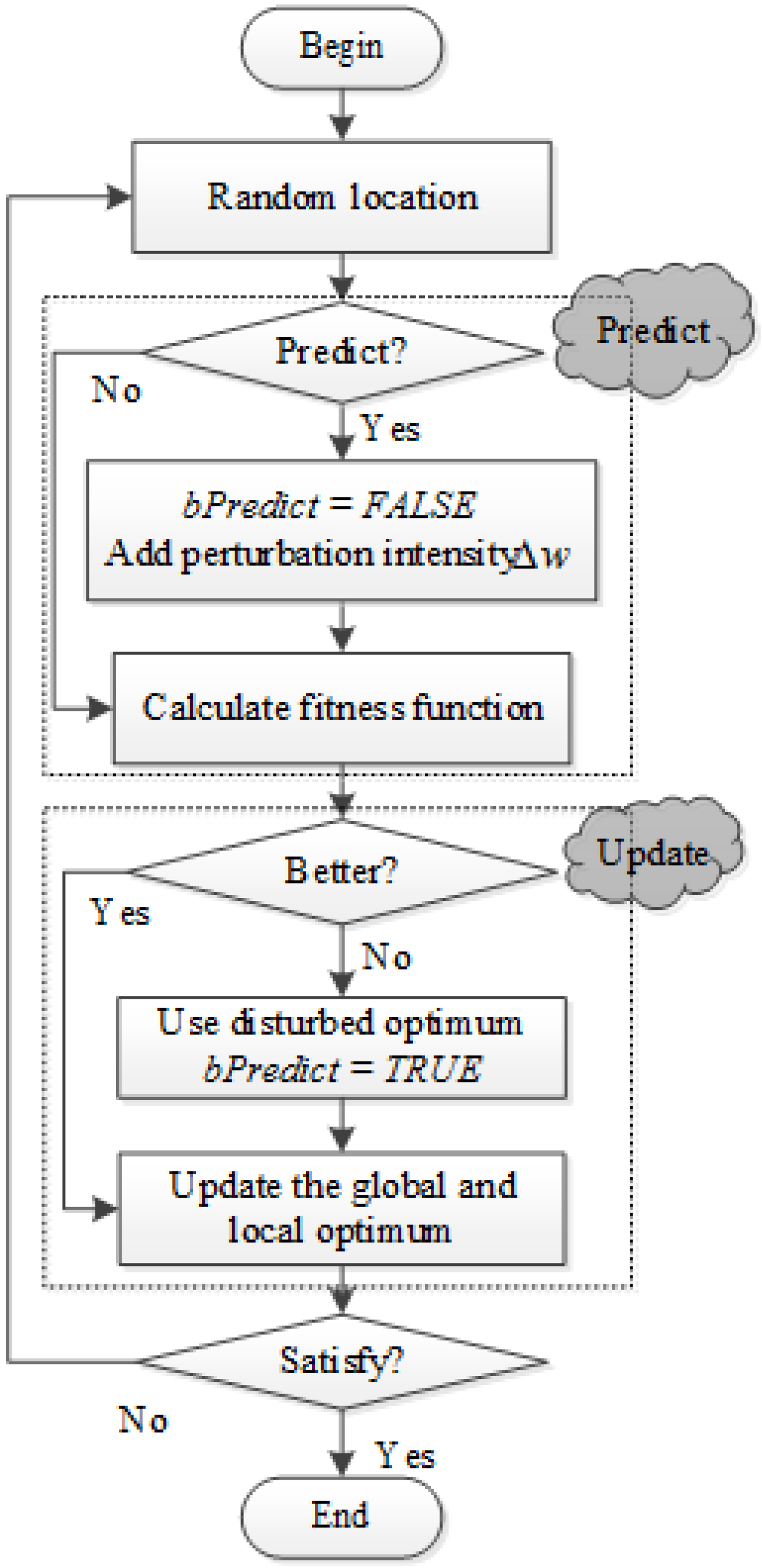
, then the predicted random perturbation can be rejected, which means the procedure just uses the original location. By recursive execution of this step, the final global optimum will be located. To adaptively set the perturbation intensity, varying adaptive methods can be applied, while this is beyond the research scope of the paper. Finally, the flowchart of IFOA is shown in
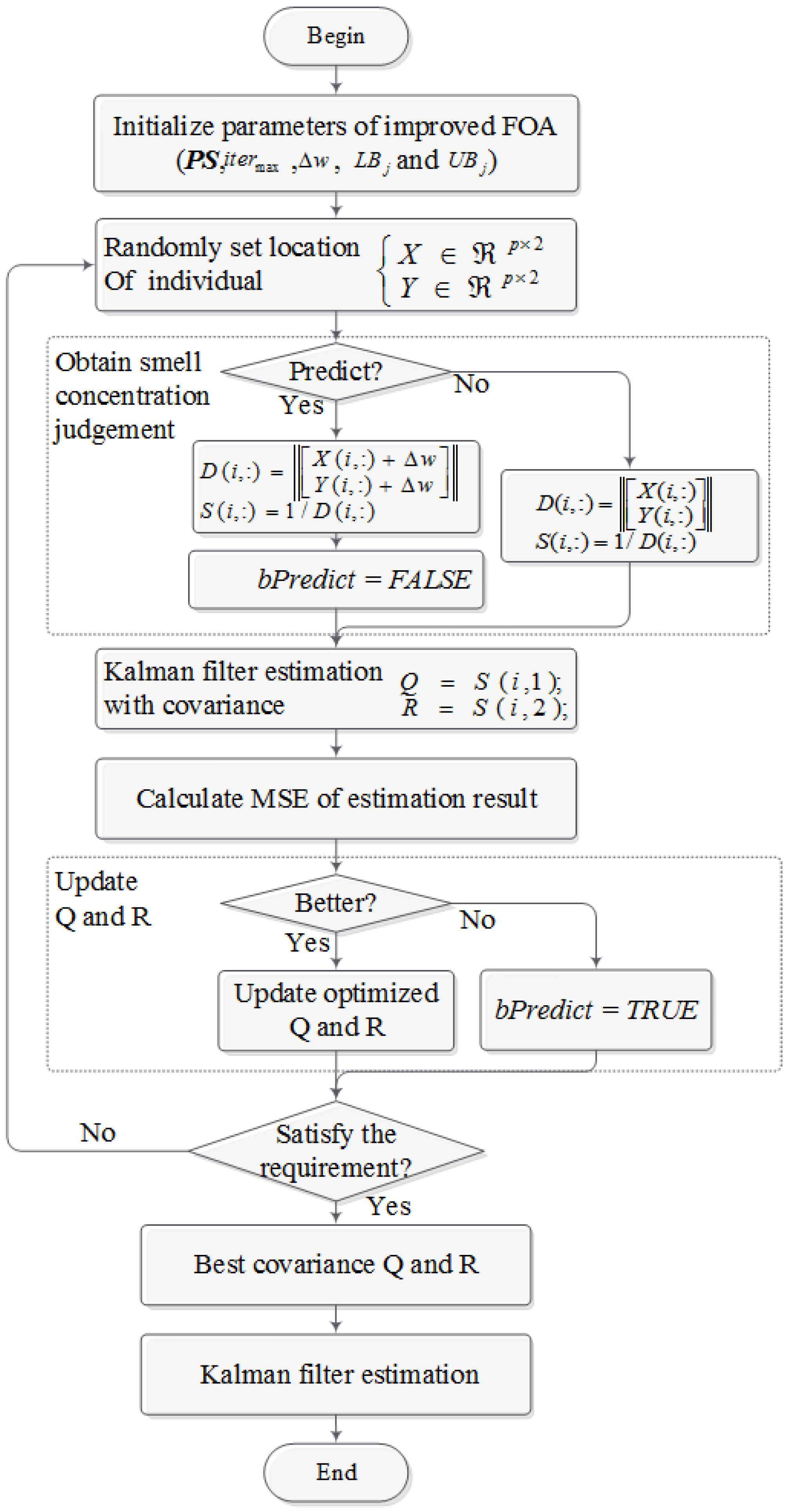
Figure 3, and the whole procedure contains two parts: predict and update. The algorithm can be described in the following steps.
Step 2.1: Initialize all of the parameters, maximum iterative steps, population size, and location range of the fruit fly group, as well as the initial perturbation intensity .
Step 2.2: Randomly choose the location of the fruit fly group, and check the flag of the prediction procedure which indicates whether the random perturbation should be used. If using the prediction procedure, reset the flag, and add the perturbation with intensity . If not, go directly to the next step.
Step 2.3: Obtain a smell concentration judgment, and calculate the fitness function using the original distance with or without perturbation.
Step 2.4: If the result of the fitness produced using the original distance with perturbation is better, update the current location of individuals by the disturbed locations. Otherwise, skip to the next step.
Step 2.5: If the fitness value from the fruit fly with the best smell is better than that of the previous generation, then the global and local optimum can be updated. Otherwise, set the prediction flag to TRUE, and update the global and local optimum.
Step 2.6: If the current iterative procedure output meets the requirement, stop the searching process; if not, go back to Step 2.2.
From the figure and the above description, the prediction procedure, which determines the perturbation intensity, can be implemented from Step 2.2 to Step 2.3, and the update procedure, which updates the current location with the predicted perturbation intensity, can be implemented through Step 2.4 to Step 2.5.
3.2. The Optimized Kalman Filter Based on IFOA(IFOA-KF)
The tuning parameters, processing noise covariance
, and observation noise covariance
indicate the uncertainty of the prediction model and the correction model, respectively. Both the processing noise covariance and observation noise covariance are unknown and need to be tuned for better estimation performance.
is notoriously difficult but it helps to inject uncertainty into the state equations and assist the filter to learn from the measurement. There are three different options for
tuning: (1) scalar quantity; (2) diagonal matrix; and (3) full matrix. In this paper, since the processing noise is mainly contributed by acceleration [
60],
is optimized as a scalar quantity. Observation matrix
is a vector because the measured variable is the current pushing distance, thus,
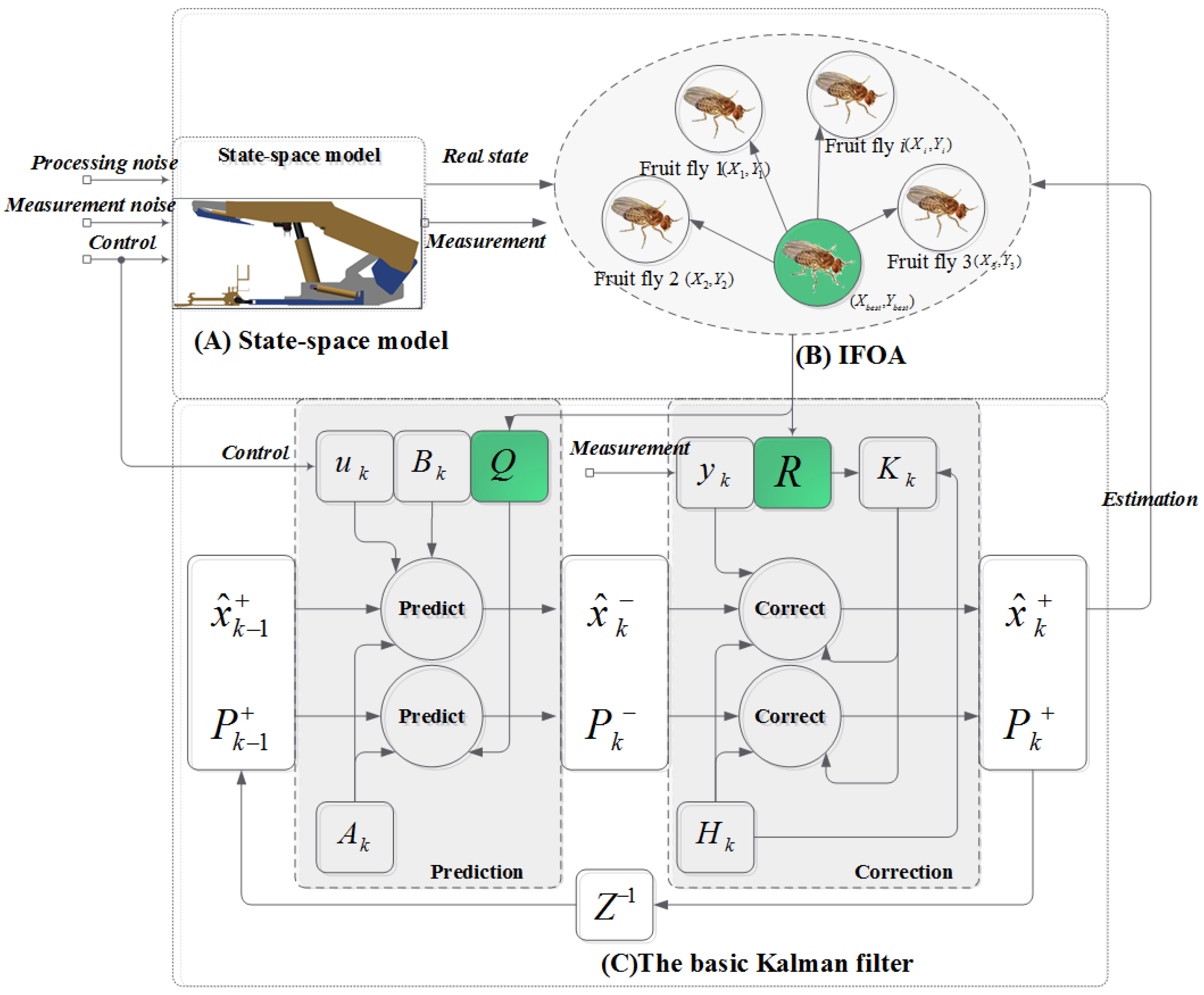
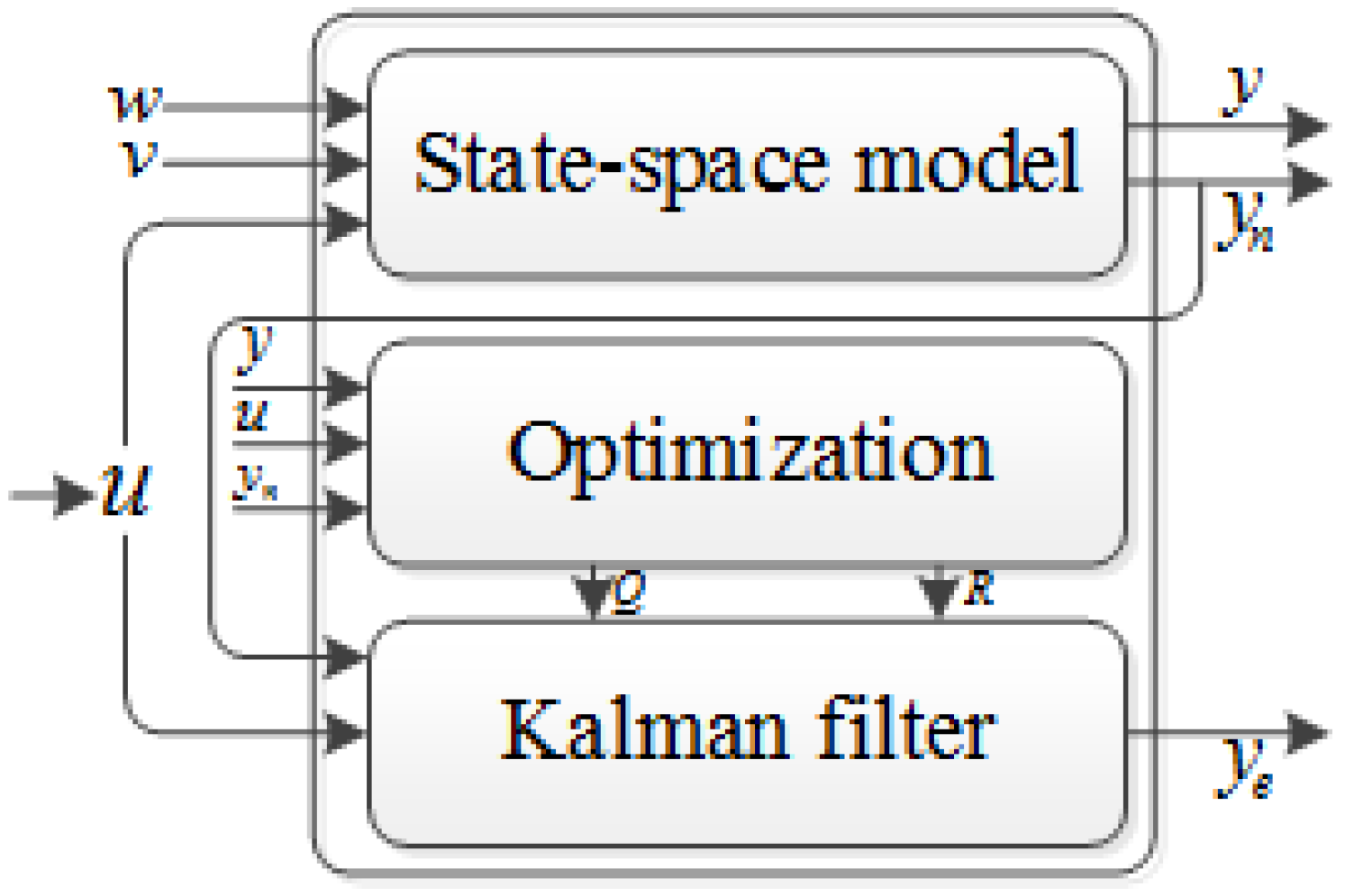
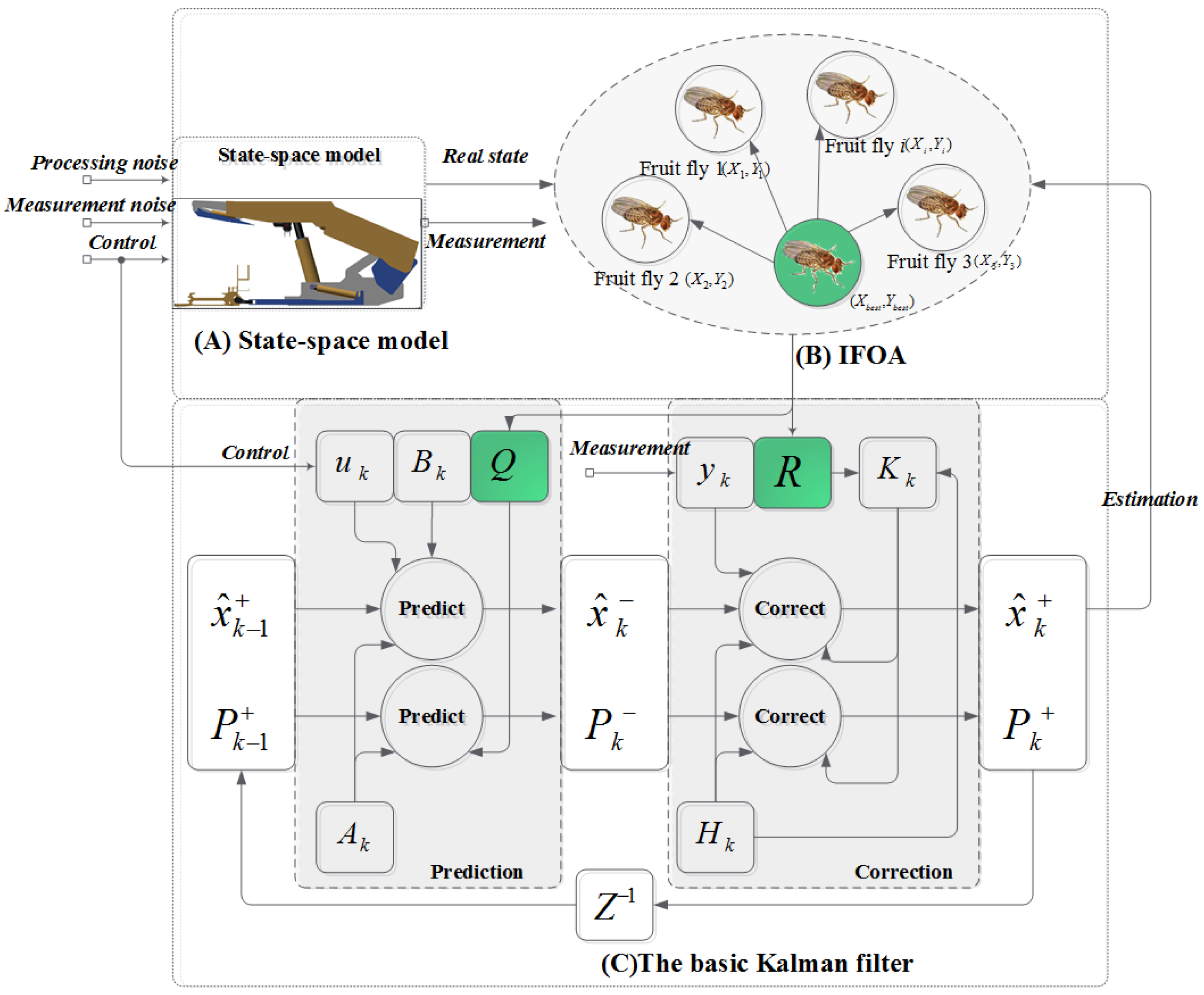
is also a scalar quantity. As shown in
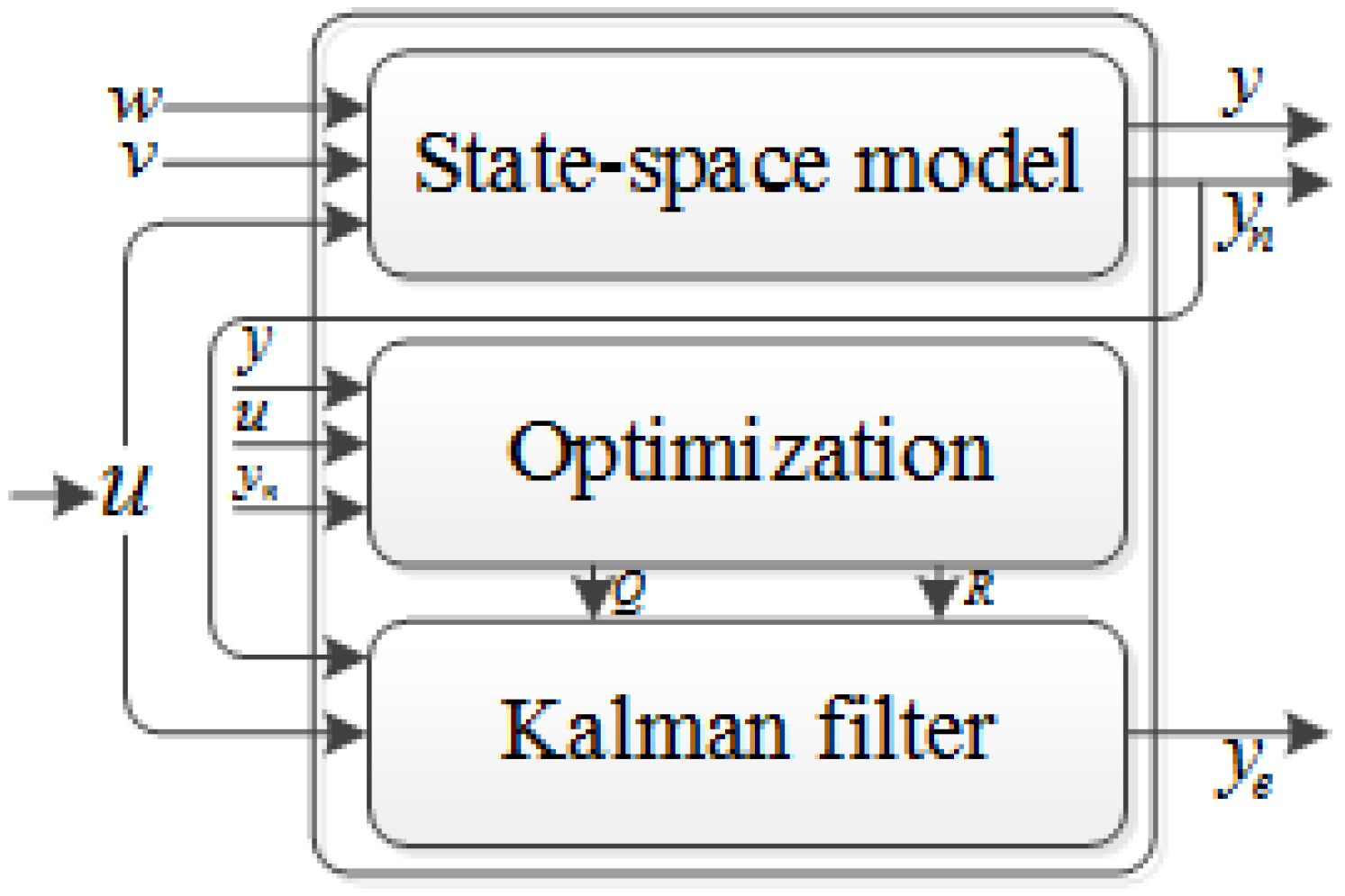
Figure 4, the offline Kalman filter tuning procedure based on IFOA is presented, and the block diagram of the proposed method can be described as follows.
(1) State-Space Model
Firstly, the state-space model of pushing distance estimation, as shown in
Figure 4A, should be constructed. The state-space model can be represented by two equations: a processing equation and an observation equation. The processing equation of pushing distance estimation is obtained as follows:
By linearization of above equation and comparing it with Equation (2), parameters of the processing model can be constructed. , and is the acceleration .
Since the only measurable state variable is displacement
, the observation equation is shown as follows:
Then, the observation matrix is vector .
(2) Fitness Function
As analyzed in
Section 4.1, to apply IFOA in pushing distance estimation, the fitness function is the key point to tune the Kalman filter. In this paper, the fitness function is obtaining a better set of
and
values resulting in lower mean squared error from the output of the Kalman filter. Thus, the fitness function of the tuning process is calculated as follows:
where
is the current posterior estimation of the pushing distance,
is the real state of the pushing distance estimation system, and
are expectation operations, which obtain the sum of the mean squared error.
(3) Kalman Filter
The block diagram, as shown in
Figure 4C, shows all of the procedures of a basic Kalman filter. In this paper, the acceleration signal obtained through the inertial sensor is treated as the control input
. The measured displacement obtained through the built-in electro-hydraulic control system of the hydraulic powered roof support is the observable variable
. During the parameter tuning process, the estimated state produced by the Kalman filter and the real state produced by the state-space model go through the fitness function, and obtain the mean square error. The mathematical description of the Kalman filter is presented as Equation (1) to Equation (6).
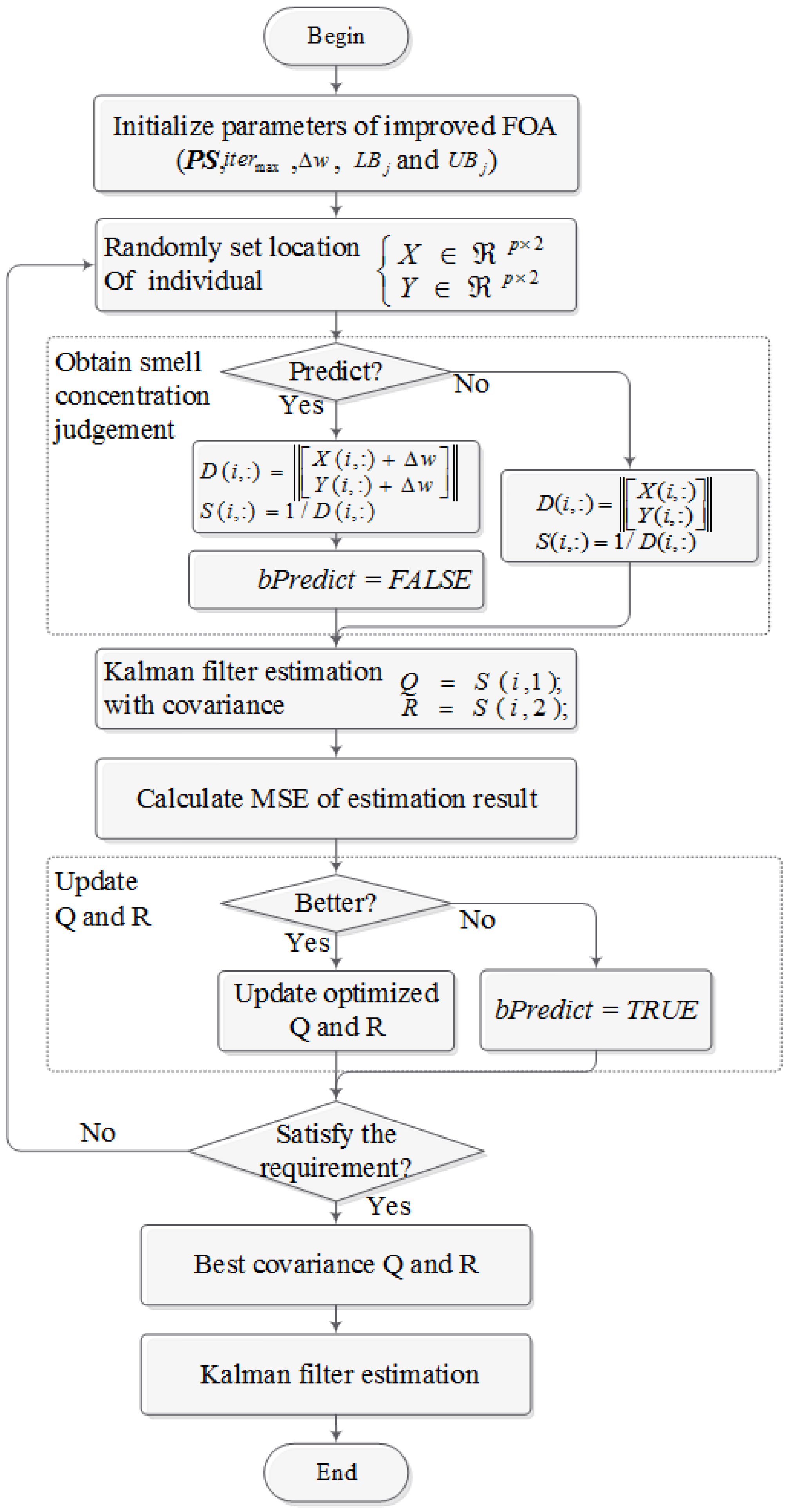
The flowchart of the proposed method, as shown in
Figure 5, is presented and the pseudo-code is demonstrated as follows:
| Procedure: IFOA-KF |
|
Parameters: PS, , , , |
| Outputs: Q,R |
| % Initialization |
| Set population size PS, maximum generation , and perturbation intensity and , |
| %Set random initial position of fruit fly swarm |
| For i = 1, 2,…, PS |
| |
| End |
| %Set individual with best smell concentration |
|
| For j = 1: |
| % if prediction is enabled |
| If bPredicte == TRUE then bPredicte = FALSE |
| |
| End |
| For i = 1, 2,…, PS |
| % Random direction and distance |
| |
| If then |
| If then |
| % obtain smell concentration |
| |
| % MSE of Kalman filter estimation result |
| |
| End |
| |
| If then |
| If then bPredicte = TRUE |
| % Kalman filter estimation using best covariance |
| |
| END |
Where, is the operation to obtain the distance from the current fruit fly location to the original coordinate; is the mean squared error of the estimation results; is the Kalman estimation operation presented as Equation (1) to Equation (6); and are the lower and upper boundaries of location range, respectively.
5. Conclusions and Future Work
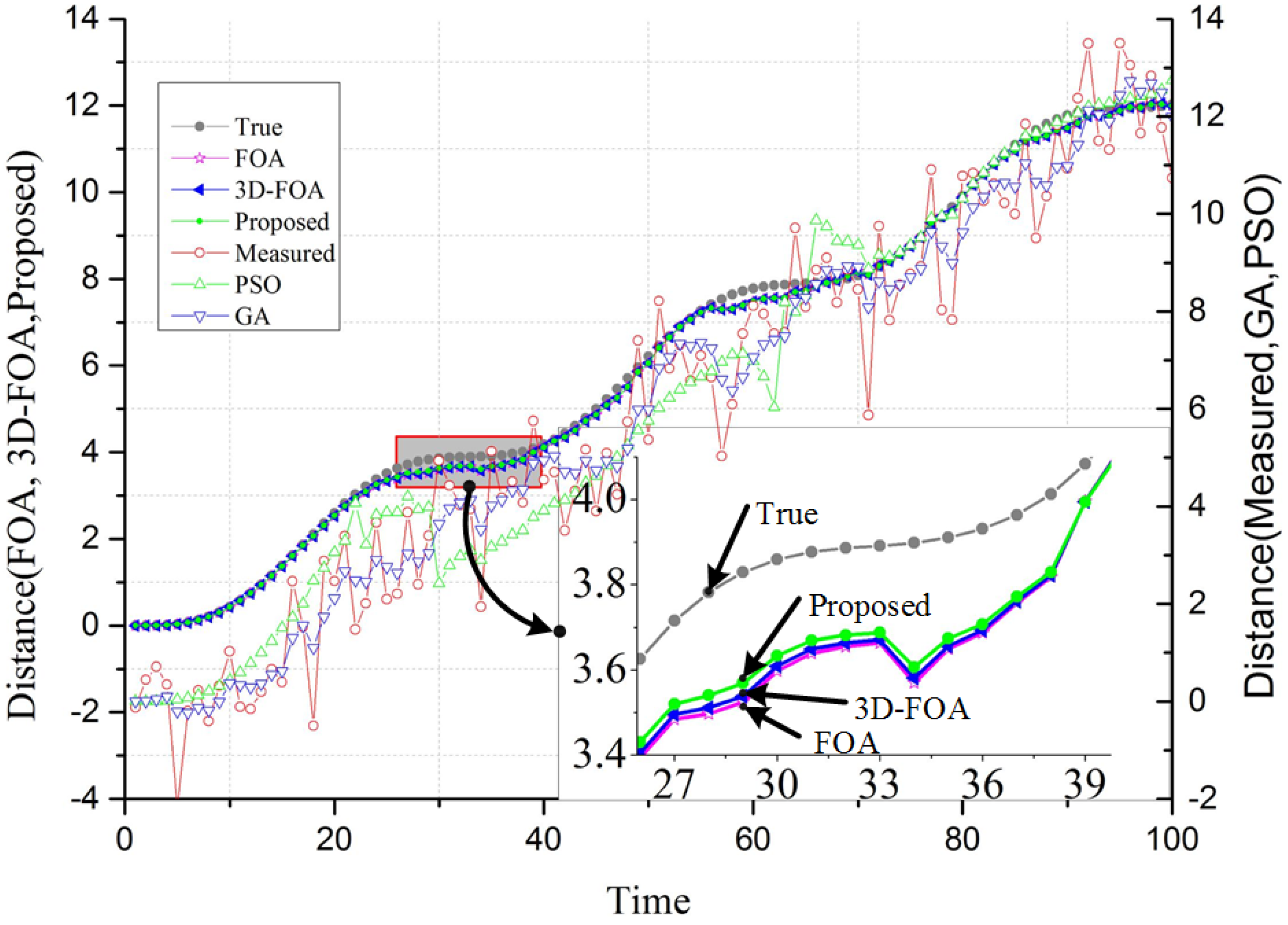
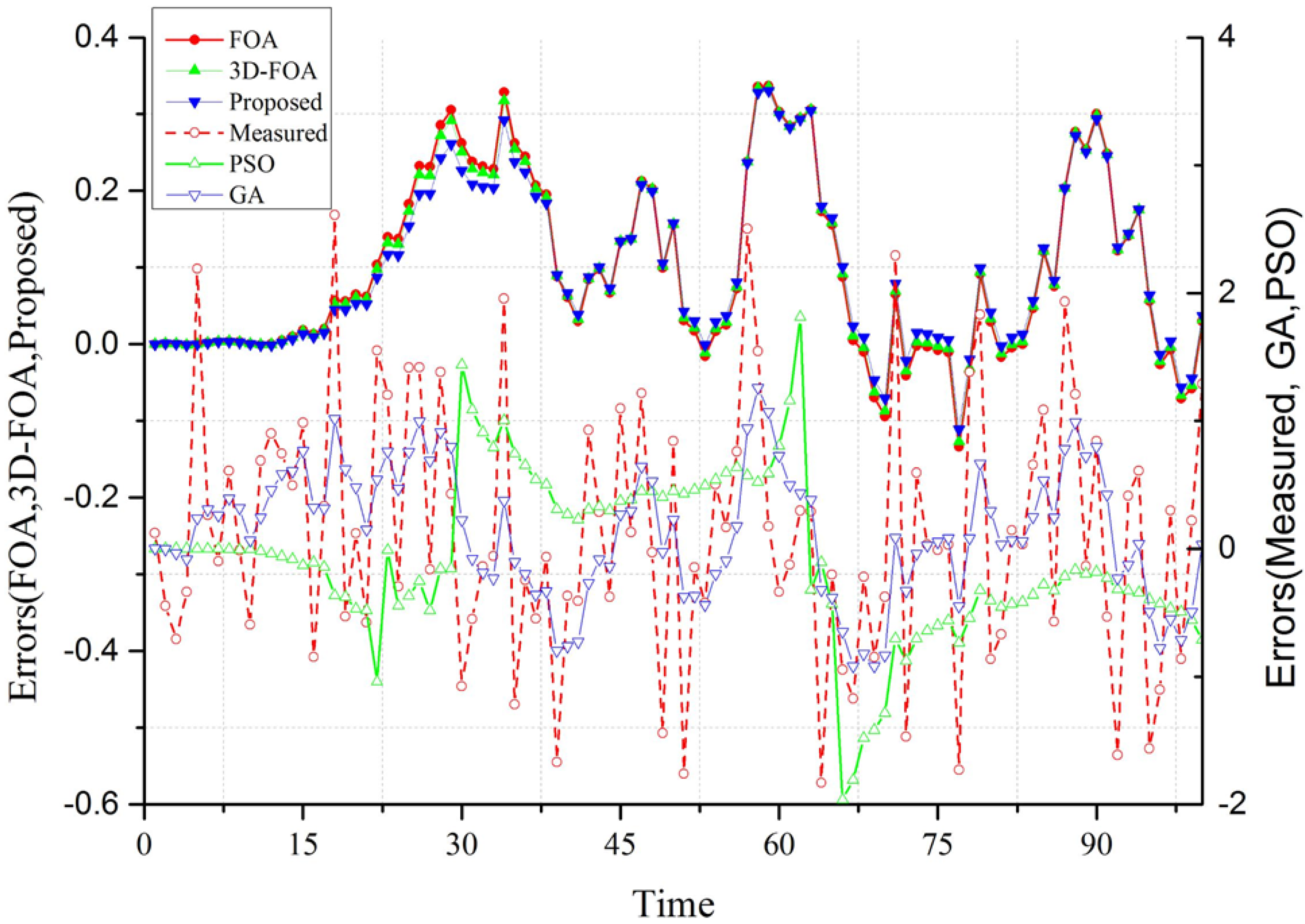
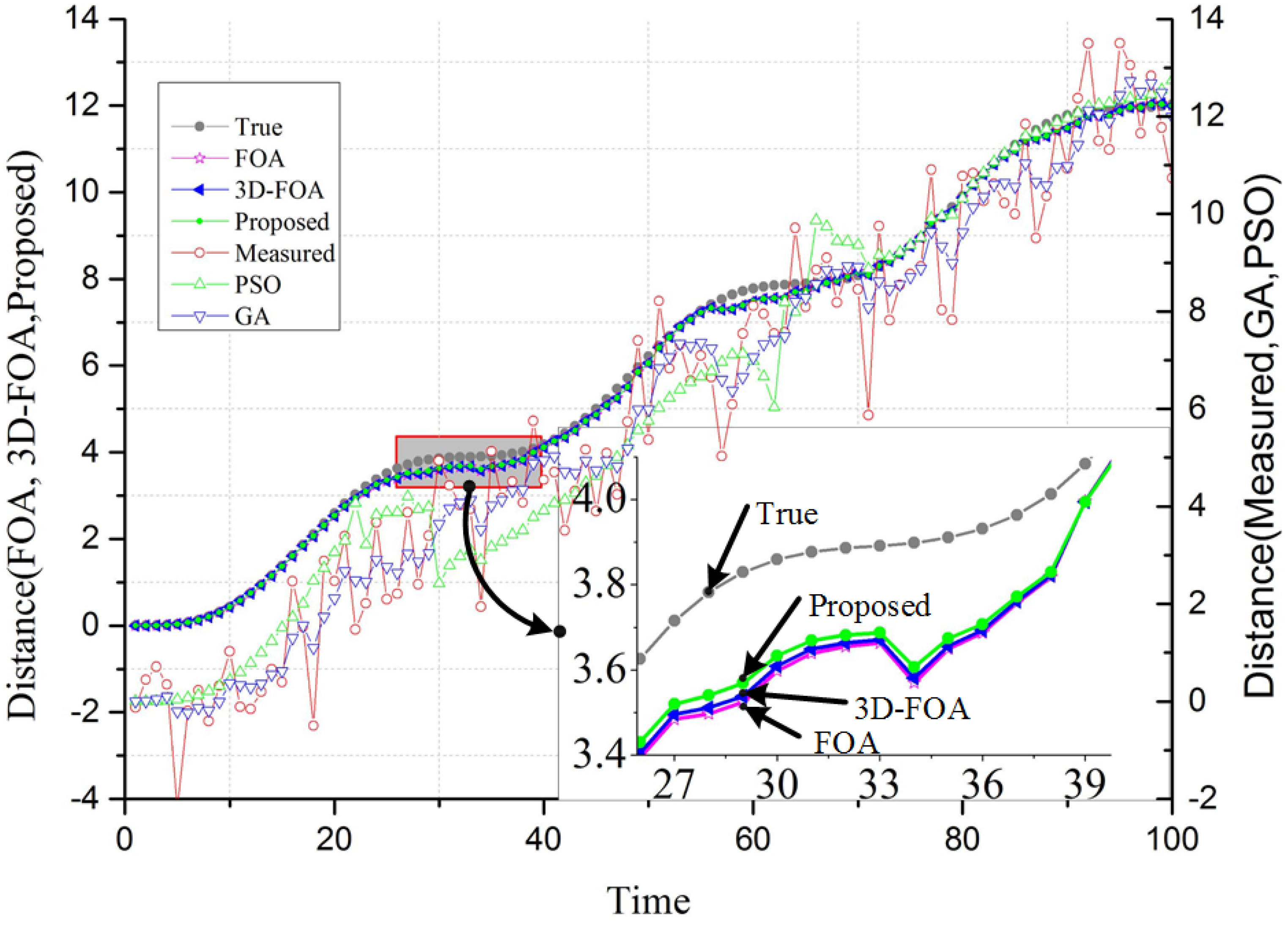
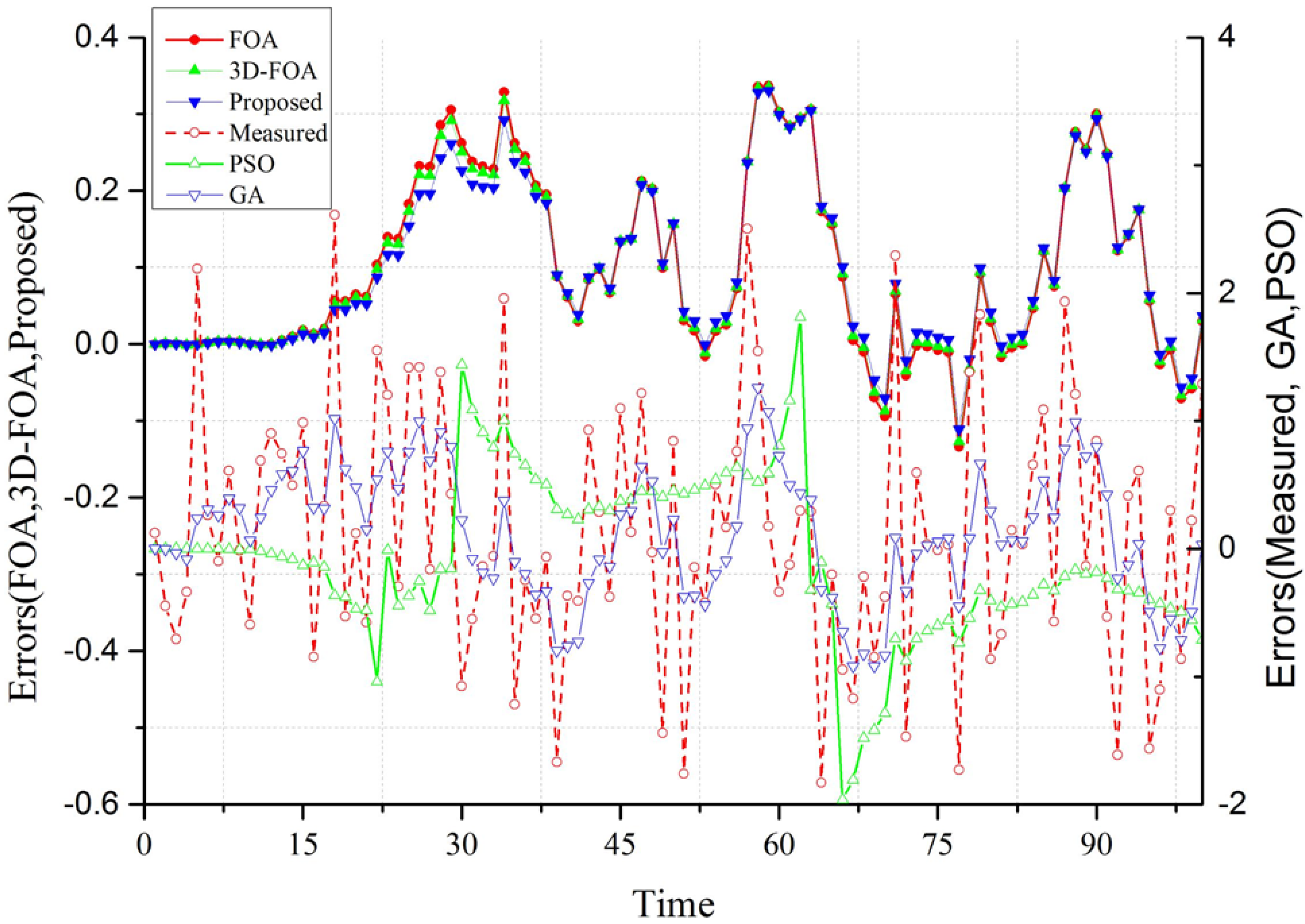
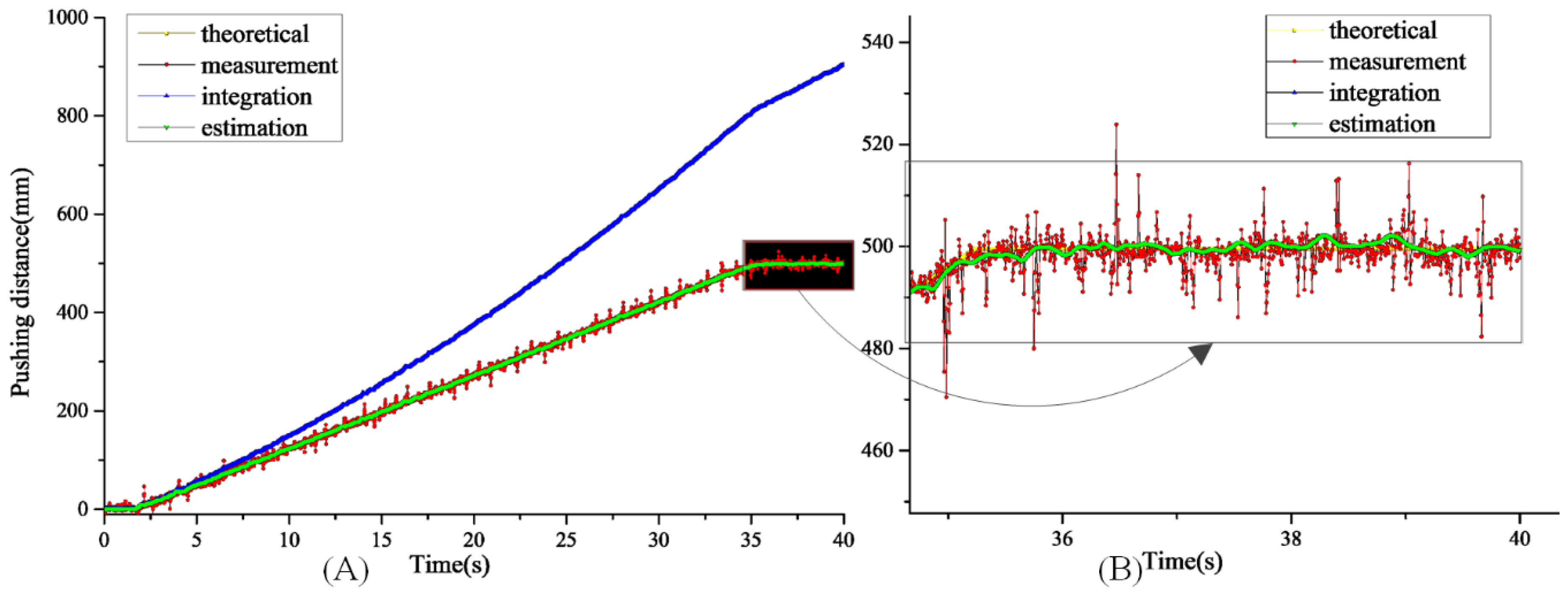
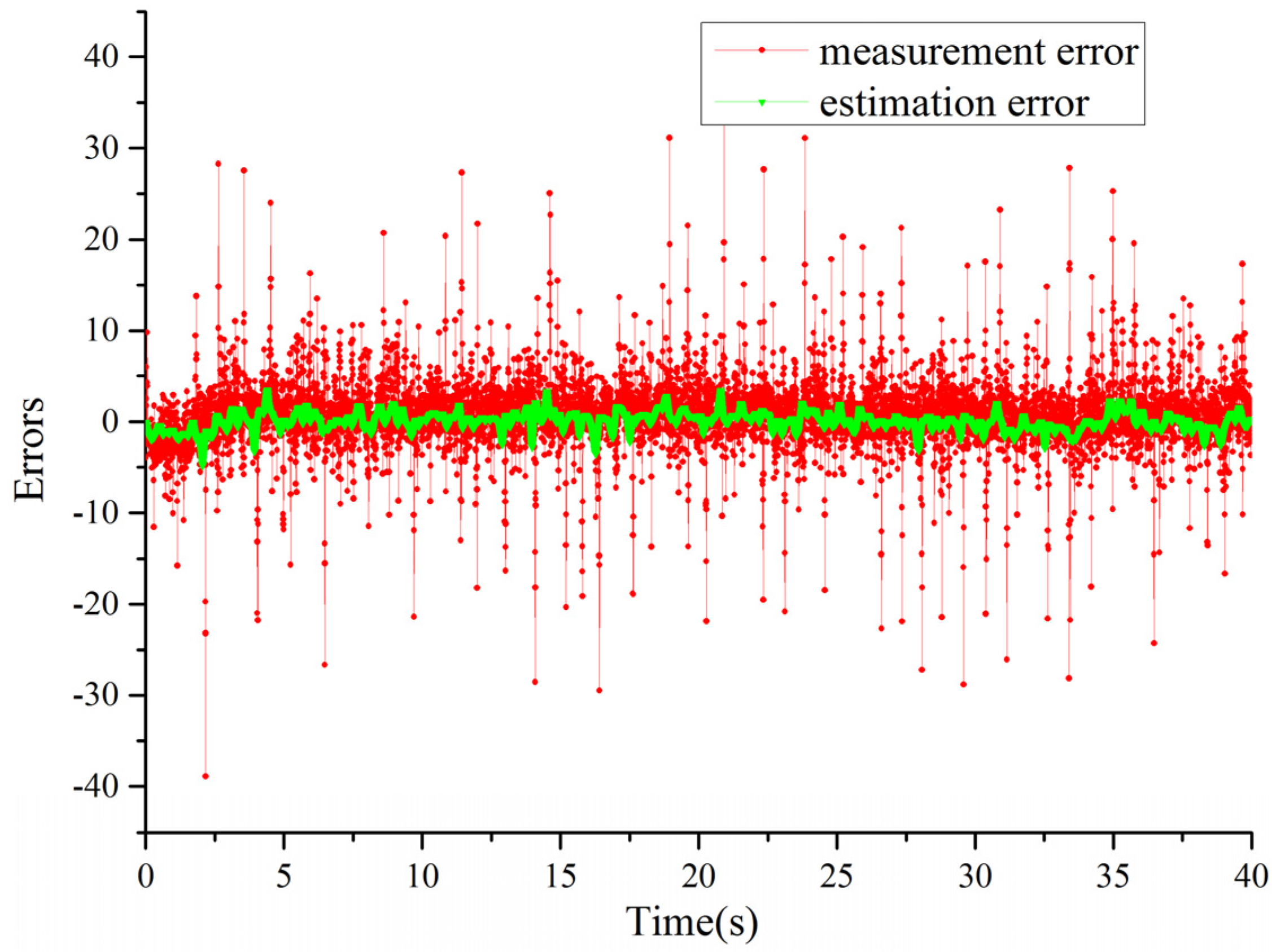
To tackle the measurement problem of the pushing distance for a hydraulic-powered roof support, this paper proposed an improved fruit fly optimization algorithm (IFOA) to fine-tune processing the noise covariance and observation noise covariance of a Kalman filter, and the optimized Kalman filter is applied to estimate the pushing distance. In the proposed IFOA, the perturbation with a certain intensity is added to the current searching location to avoid the local optimum. Moreover, the flowchart of the IFOA is presented, and the details, state-space model, fitness function, and Kalman filter implementation procedure are demonstrated. To verify the performance of the proposed method, other optimization algorithms (GA, PSO, basic FOA, and 3D-FOA) are utilized to process a simulated artificial signal. A comparison of the results proved the effectiveness and superiority of the proposed method. Finally, the proposed IFOA-KF is applied for pushing distance estimation, and the estimation results also proved the state-of-art performance of the proposed IFOA-KF.
This work is very valuable for pushing distance estimation, and solves the problem of a non-reusable displacement sensor on a fully-mechanized coal mining working face. However, the error elimination is still a challenge. Our future work will focus on optimization of the error elimination, and applying this approach to other similar scenarios, such as inertial sensor information estimation, Kalman-based position tracking, and supporting height estimation of hydraulic supports, etc.




 is the output port of the state-space model;
is the output port of the state-space model;  is the input port of the Kalman filter observation model, and the input port and output port are connected to each other.
is the input port of the Kalman filter observation model, and the input port and output port are connected to each other.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}