
Research on the Fault Coefficient in Complex Electrical Engineering

Abstract
:1. Introduction
2. The Fundamental of Feature Extraction about the Fault Coefficient
3. Phasor Measurement Unit and Wide Area Measurement System

{kind=link}
{kind=link}
{kind=link}
| Items | Technical Specifications |
|---|---|
| Sampling for analog input | Sampling frequency 4800 Hz, at least 36 channels ,extensible by multiple |
| GPS timing accuracy | 1 |
| Error limit for angle | 0.01 degree |
| Error limit for amplitude | 0.2%(Relative error) |
| Error limit for power | 0.5%(Relative error) |
| Error limit for frequency | 0.001 Hz, measurement range 45–55 Hz |
| Dynamic data retained time | 25 frames/sec, 50 frames/sec, 100 frames/sec |
| Dynamic data retained time | ≥14 days |
| Dynamic data output rate | 25 frames/sec, 50 frames/sec, 100 frames/sec |
| Time range for fault recording | −5 sec~+15 sec |
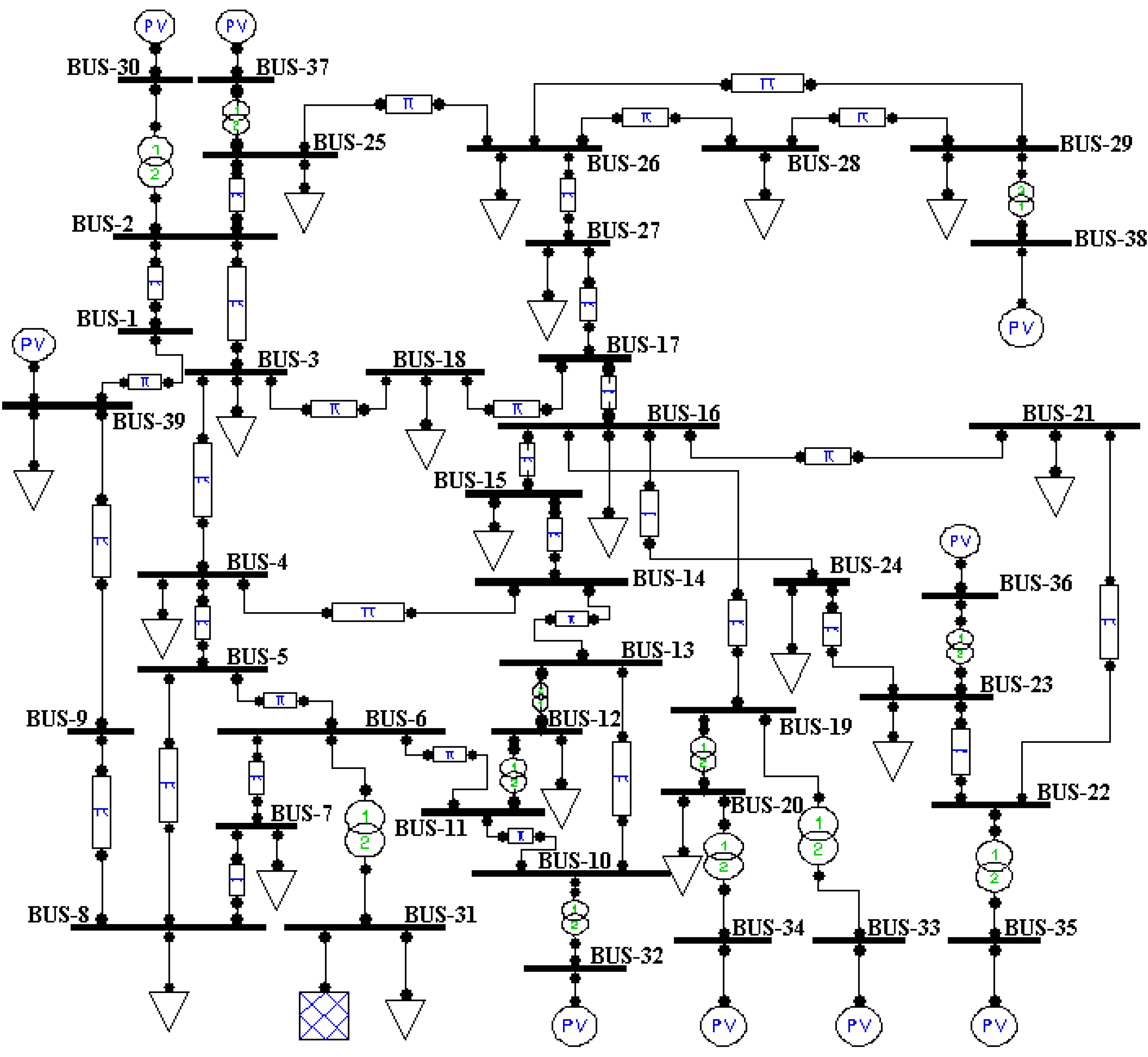
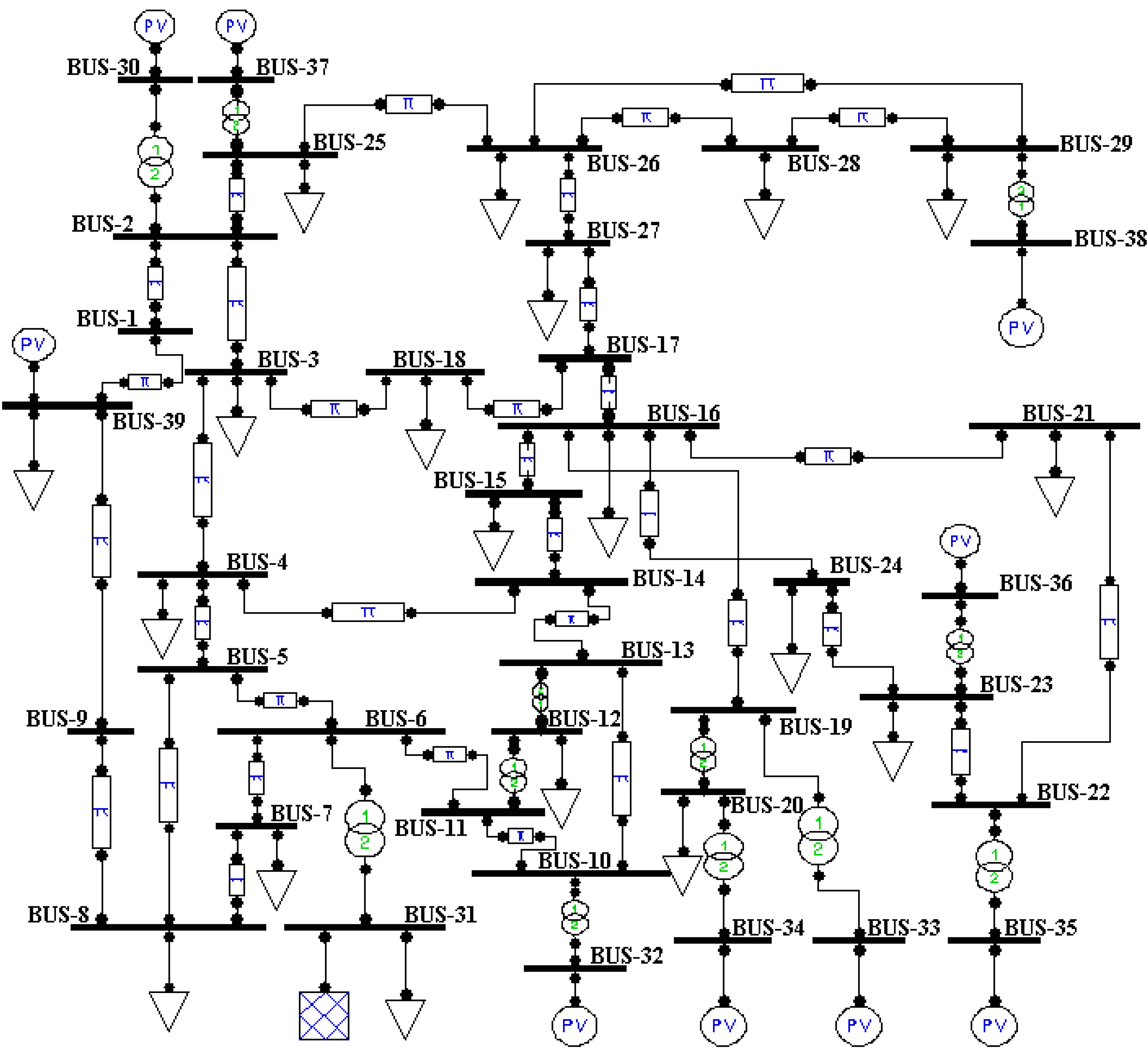
4. Fault Coefficient Feature Extraction in Complex Electrical Engineering
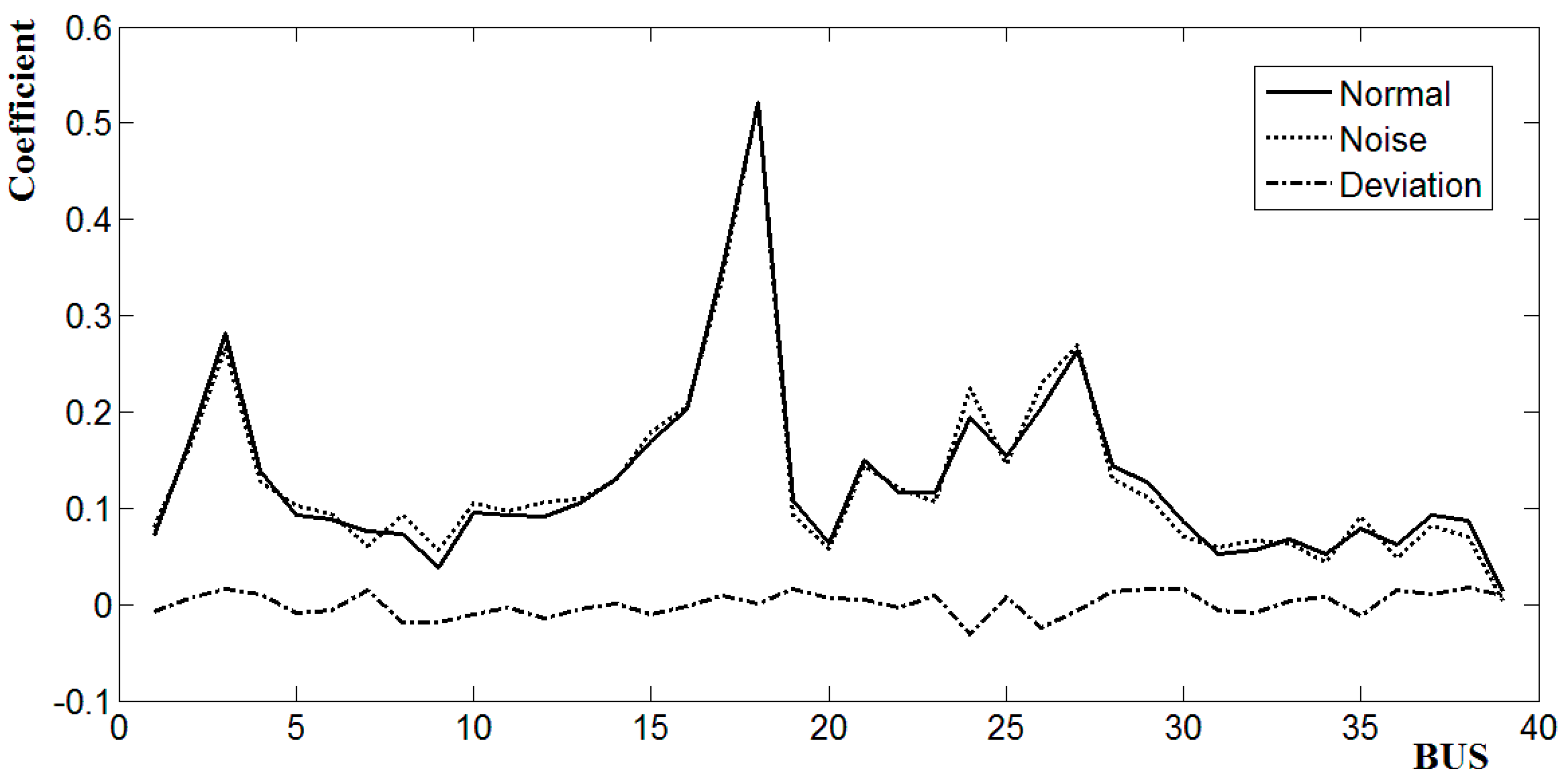
4.1. Fault Coefficient Feature Extraction in Asymmertical Short Circuit Fault
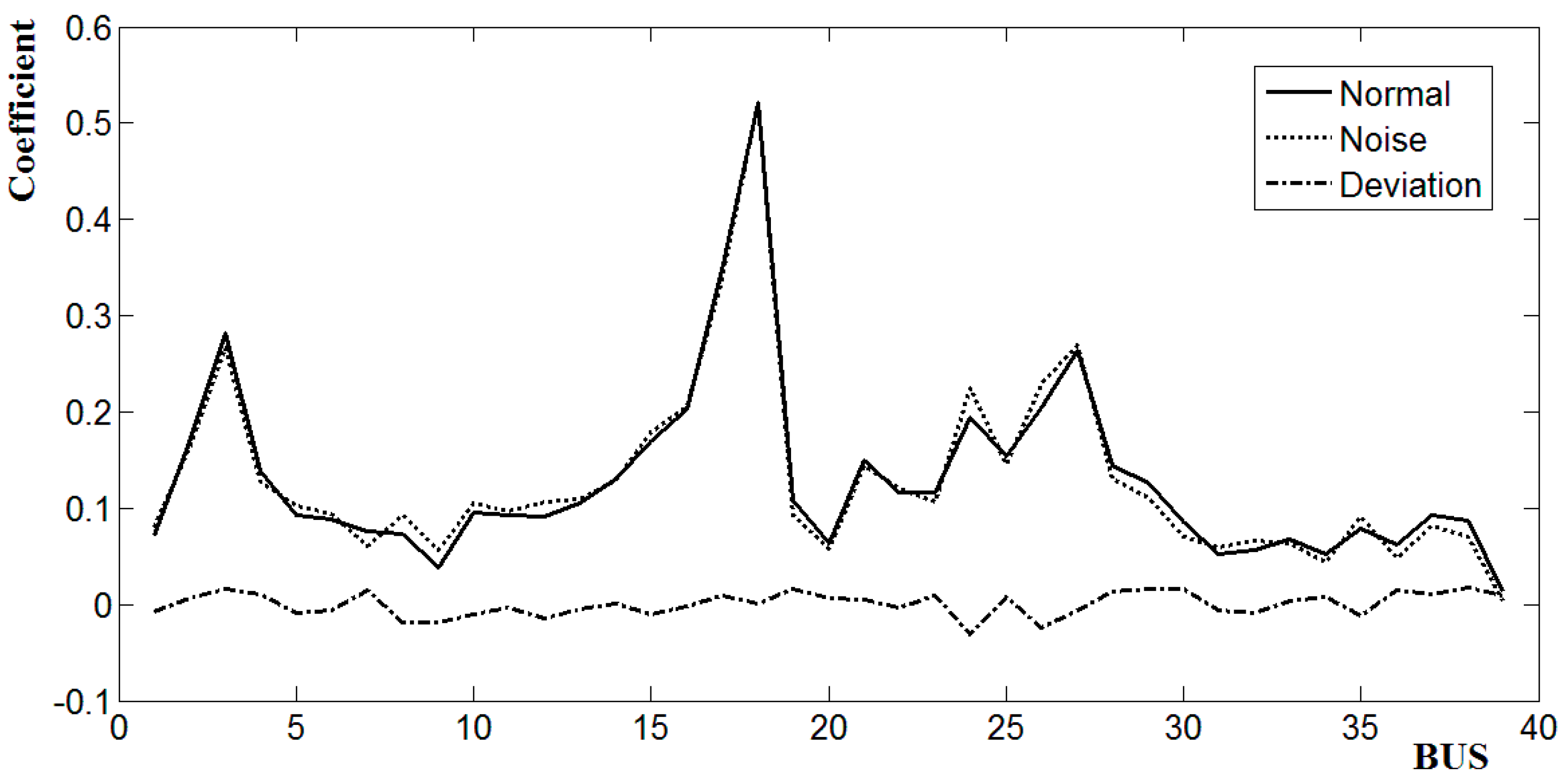
| BUS | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| BUS-1 | 0.080184 | −0.131590 | −0.101984 | 0.080719 | −0.003175 |
| BUS-2 | 0.162261 | 0.083017 | −0.250354 | −0.026744 | −0.013902 |
| BUS-3 | 0.266219 | 0.001688 | −0.118200 | −0.064936 | −0.015069 |
| BUS-4 | 0.127872 | −0.312857 | 0.106917 | −0.028192 | 0.007209 |
| BUS-5 | 0.101886 | −0.139861 | 0.059463 | −0.079273 | 0.003251 |
| BUS-6 | 0.094243 | −0.105051 | −0.019010 | 0.066930 | −0.004484 |
| BUS-7 | 0.060710 | 0.063427 | −0.020301 | 0.092355 | −0.011011 |
| BUS-8 | 0.092570 | 0.178899 | 0.444781 | −0.033685 | −0.011589 |
| BUS-9 | 0.056463 | 0.241210 | −0.003291 | 0.021823 | −0.015598 |
| BUS-10 | 0.105765 | −0.019603 | 0.252826 | −0.001555 | −0.005394 |
| BUS-11 | 0.096482 | 0.078763 | −0.153092 | 0.514546 | −0.033082 |
| BUS-12 | 0.106159 | −0.291748 | −0.167308 | −0.441553 | 0.025298 |
| BUS-13 | 0.109040 | −0.154105 | −0.140309 | 0.315717 | −0.014559 |
| BUS-14 | 0.128760 | 0.029623 | −0.235643 | 0.039650 | −0.012181 |
| BUS-15 | 0.178810 | 0.104209 | −0.050374 | −0.018207 | −0.015830 |
| BUS-16 | 0.204963 | −0.218805 | 0.025884 | 0.064883 | −0.006450 |
| BUS-17 | 0.337853 | 0.222826 | −0.222634 | −0.000227 | −0.032912 |
| BUS-18 | 0.520984 | 0.008621 | 0.103751 | −0.109780 | −0.029657 |
| BUS-19 | 0.092290 | 0.056933 | 0.056848 | 0.250654 | −0.019615 |
| BUS-20 | 0.057301 | −0.102682 | −0.000145 | −0.105831 | 0.005540 |
| BUS-21 | 0.144469 | −0.108241 | 0.150710 | 0.117057 | −0.009449 |
| BUS-22 | 0.120420 | −0.151639 | 0.326165 | 0.254042 | −0.011526 |
| BUS-23 | 0.106459 | 0.019505 | −0.207799 | 0.109369 | −0.013268 |
| BUS-24 | 0.224937 | 0.025912 | 0.090412 | 0.105611 | −0.020465 |
| BUS-25 | 0.146205 | 0.161939 | −0.111320 | −0.011973 | −0.016714 |
| BUS-26 | 0.228639 | −0.168502 | −0.098185 | −0.027499 | −0.006507 |
| BUS-27 | 0.269287 | 0.036244 | −0.110314 | −0.081870 | −0.016063 |
| BUS-28 | 0.130908 | 0.062338 | 0.239487 | −0.136104 | −0.004834 |
| BUS-29 | 0.110627 | −0.203351 | 0.176203 | 0.087581 | −0.001551 |
| BUS-30 | 0.069968 | 0.010437 | −0.040059 | −0.089817 | −0.001214 |
| BUS-31 | 0.058711 | −0.027466 | 0.051000 | −0.165169 | 0.004804 |
| BUS-32 | 0.065727 | 0.044988 | −0.002490 | 0.044075 | 0.995845 |
| BUS-33 | 0.063605 | −0.108394 | 0.026131 | −0.216139 | 0.010330 |
| BUS-34 | 0.044253 | 0.222910 | 0.019923 | −0.096440 | −0.008673 |
| BUS-35 | 0.091074 | 0.437935 | 0.166688 | 0.058293 | −0.027958 |
| BUS-36 | 0.047710 | 0.113603 | 0.083594 | −0.173864 | −0.000377 |
| BUS-37 | 0.082034 | −0.157442 | 0.263679 | 0.102439 | −0.002176 |
| BUS-38 | 0.069996 | 0.287236 | 0.128940 | −0.199584 | −0.008440 |
| BUS-39 | 0.003890 | 0.035845 | −0.112979 | −0.053292 | 0.000200 |
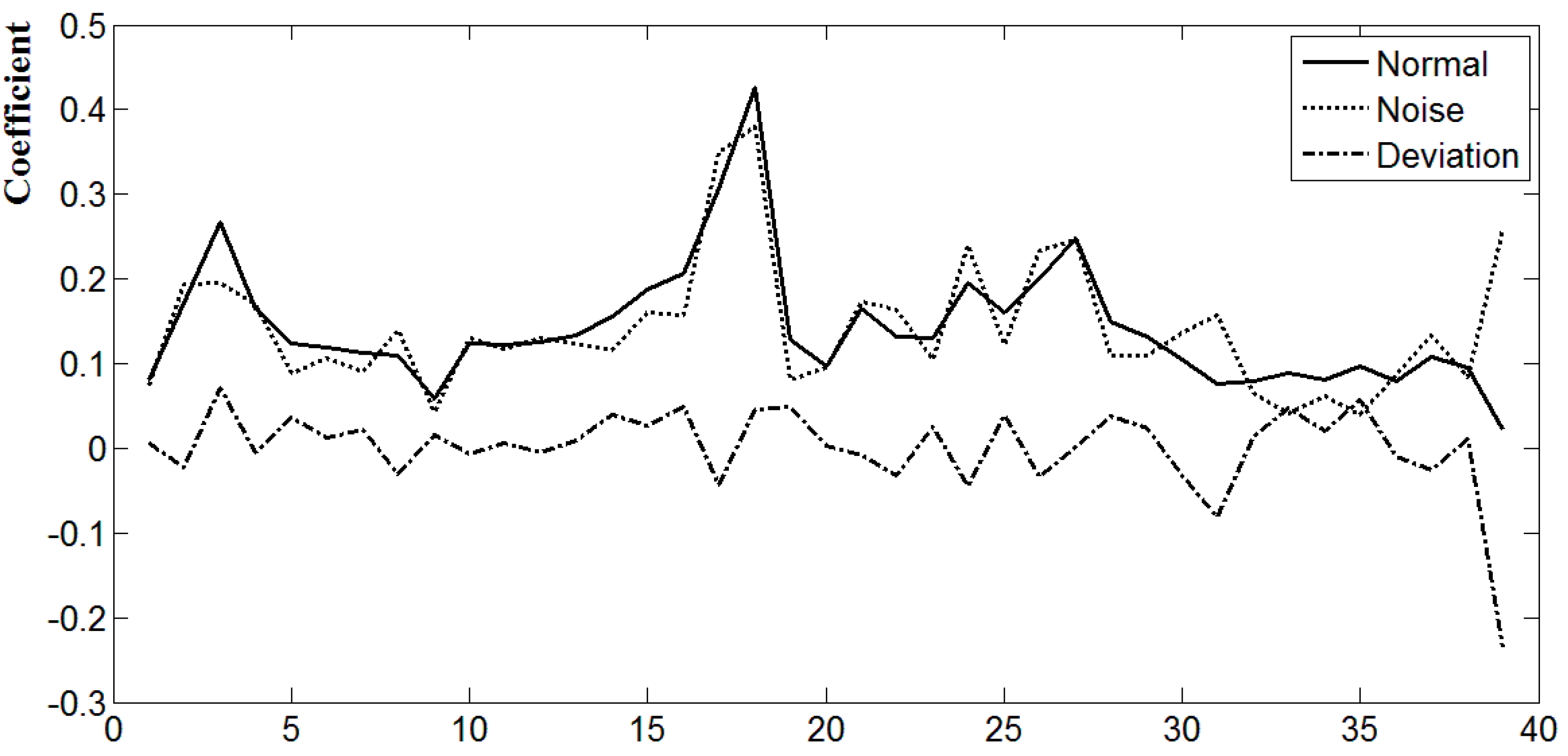
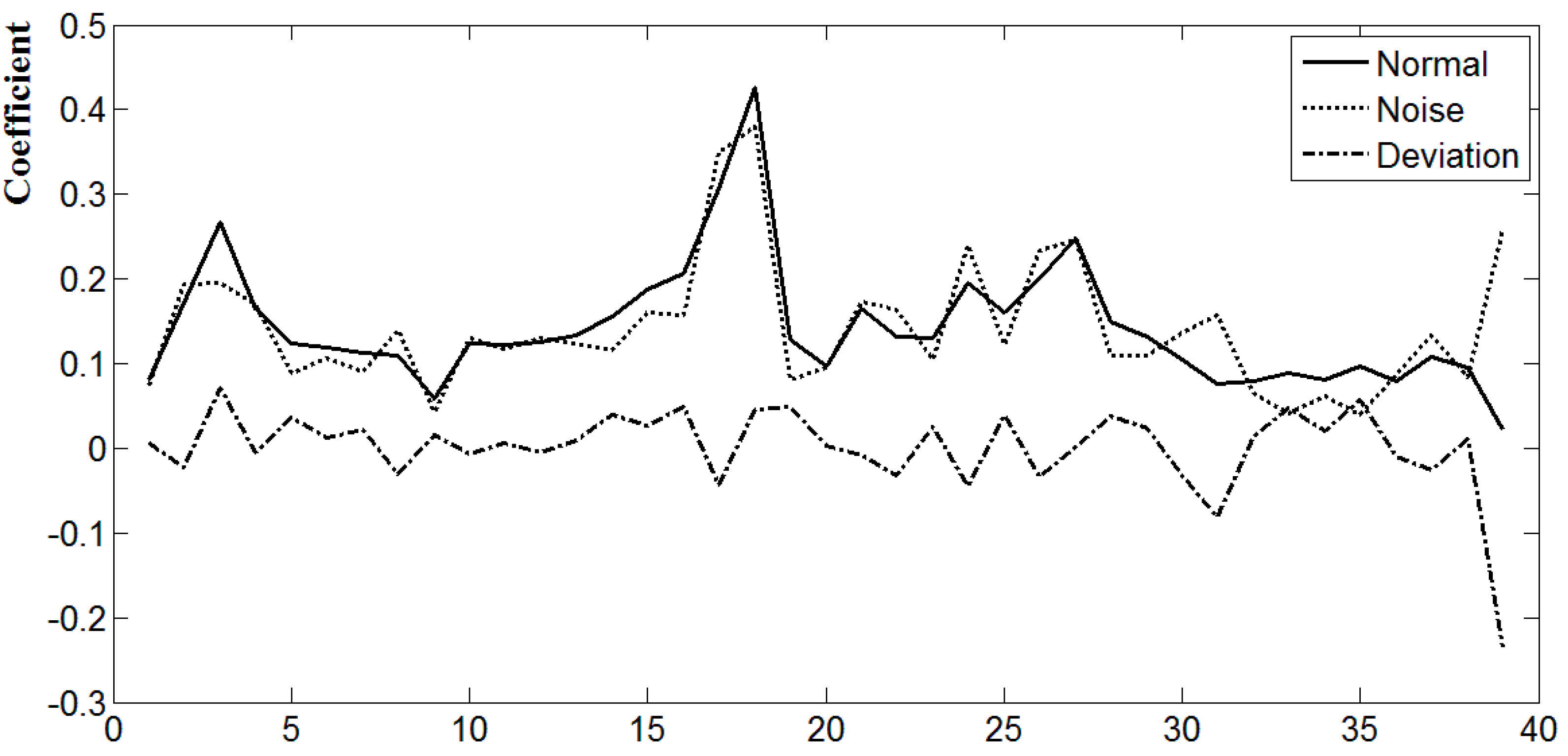
4.2. Fault Coefficient Feature Extraction in Symmetrical Short Circuit Fault
| BUS | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| BUS-1 | 0.074346 | 0.052964 | −0.001593 | −0.000682 | −0.005143 |
| BUS-2 | 0.193963 | 0.012428 | −0.007633 | −0.007139 | −0.012111 |
| BUS-3 | 0.195029 | 0.039759 | −0.006921 | −0.006016 | −0.012461 |
| BUS-4 | 0.169430 | −0.011105 | −0.007275 | −0.007172 | −0.010351 |
| BUS-5 | 0.088094 | 0.160465 | 0.000814 | 0.003357 | −0.007109 |
| BUS-6 | 0.106626 | 0.068563 | −0.002489 | −0.001293 | −0.007299 |
| BUS-7 | 0.090224 | 0.073833 | −0.001669 | −0.000420 | −0.006341 |
| BUS-8 | 0.139135 | −0.062473 | −0.007449 | −0.008164 | −0.007946 |
| BUS-9 | 0.042615 | 0.066201 | 0.000078 | 0.001137 | −0.003320 |
| BUS-10 | 0.130098 | 0.068635 | −0.003453 | −0.002218 | −0.008750 |
| BUS-11 | 0.117286 | 0.075571 | −0.002734 | −0.001416 | −0.008030 |
| BUS-12 | 0.130002 | 0.026162 | −0.004623 | −0.004025 | −0.008303 |
| BUS-13 | 0.123483 | 0.080095 | −0.002864 | −0.001468 | −0.008460 |
| BUS-14 | 0.115265 | 0.027552 | −0.003978 | −0.003383 | −0.007407 |
| BUS-15 | 0.160039 | 0.012319 | −0.006241 | −0.005803 | −0.010014 |
| BUS-16 | 0.156472 | 0.151342 | −0.002250 | 0.000264 | −0.011238 |
| BUS-17 | 0.349494 | 0.184110 | −0.009282 | −0.005971 | −0.023503 |
| BUS-18 | 0.380180 | 0.074222 | −0.013582 | −0.011868 | −0.024257 |
| BUS-19 | 0.080870 | −0.058891 | −0.004954 | −0.005708 | −0.004384 |
| BUS-20 | 0.094795 | 0.064737 | −0.002108 | −0.000989 | −0.006528 |
| BUS-21 | 0.173913 | 0.086564 | −0.004759 | −0.003186 | −0.011643 |
| BUS-22 | 0.162841 | −0.009310 | −0.006954 | −0.006835 | −0.009963 |
| BUS-23 | 0.104185 | −0.067407 | −0.006148 | −0.006993 | −0.005736 |
| BUS-24 | 0.239691 | 0.013811 | −0.009475 | −0.008888 | −0.014950 |
| BUS-25 | 0.122016 | 0.064783 | −0.003227 | −0.002063 | −0.008211 |
| BUS-26 | 0.234122 | −0.000439 | −0.009640 | −0.009275 | −0.014458 |
| BUS-27 | 0.245774 | −0.016099 | −0.010552 | −0.010404 | −0.015015 |
| BUS-28 | 0.109912 | 0.208295 | 0.001239 | 0.004533 | −0.008954 |
| BUS-29 | 0.109377 | −0.027594 | −0.005261 | −0.005501 | −0.006470 |
| BUS-30 | 0.137135 | −0.124739 | −0.009088 | −0.010739 | −0.007175 |
| BUS-31 | 0.156919 | −0.015092 | −0.006870 | −0.006848 | −0.009537 |
| BUS-32 | 0.064740 | −0.166245 | −0.007259 | −0.009646 | −0.002272 |
| BUS-33 | 0.041073 | −0.027614 | 0.998774 | 0.000000 | 0.000000 |
| BUS-34 | 0.061483 | 0.010516 | −0.002238 | −0.001983 | 0.998048 |
| BUS-35 | 0.039357 | −0.042477 | −0.002793 | 0.998318 | 0.000000 |
| BUS-36 | 0.087746 | 0.191227 | 0.001679 | 0.004682 | −0.007407 |
| BUS-37 | 0.133753 | 0.032855 | −0.004592 | −0.003888 | −0.008604 |
| BUS-38 | 0.083942 | 0.085576 | −0.001086 | 0.000329 | −0.006075 |
| BUS-39 | 0.258362 | −0.843064 | −0.033934 | −0.046151 | −0.007201 |
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ajami, A.; Daneshvar, M. Data driven approach for fault detection and diagnosis of turbine in thermal power plant using Independent Component Analysis (ICA). Int. J. Electr. Power Energy Syst. 2012, 43, 728–735. [Google Scholar] [CrossRef]
- Frank, P.M. Analytical and qualitative model-based fault diagnosis—A survey and some new results. Eur. J. Control 1996, 2, 6–28. [Google Scholar] [CrossRef]
- Chakraborty, S.; Keller, E.; Ray, A.; Mayer, J. Detection and estimation of demagnetization faults in permanent magnet synchronous motors. Electr. Power Syst. Res. 2013, 96, 225–236. [Google Scholar] [CrossRef]
- Patton, R.J.; Frank, P.M.; Clark, R. Fault Diagnosis in Dynamic Systems Theory and Application; Prentice Hall: Herfordahire, UK, 1989. [Google Scholar]
- Frank, P.M. Fault detection in dynamic system using analytical and knowledge-based redundancy—A survey and some new result. Automation 1990, 26, 459–474. [Google Scholar] [CrossRef]
- Cho, Y.S.; Jang, G. New technique for enhancing the accuracy of HVDC systems in state estimation. Int. J. Electr. Power Energy Syst. 2014, 54, 658–663. [Google Scholar] [CrossRef]
- Korres, G.N.; Tzavellas, A.; Galinas, E. A distributed implementation of multi-area power system state estimation on a cluster of computers. Electr. Power Syst. Res. 2013, 102, 20–32. [Google Scholar] [CrossRef]
- Guo, Y.; Wu, W.C.; Zhang, B.M.; Sun, H.B. A method for evaluating the accuracy of power system state estimation results based on correntropy. Int. J. Electr. Power Energy Syst. 2014, 60, 45–52. [Google Scholar] [CrossRef]
- Geramifard, O.; Xu, J.X.; Pana, S.K. Fault detection and diagnosis in synchronous motors using hidden Markov model-based semi-nonparametric approach. Eng. Appl. Artif. Intell. 2013, 26, 1919–1929. [Google Scholar] [CrossRef]
- Zhang, Y.G.; Wang, Z.P.; Zhang, J.F. Fault identification based on NLPCA in complex electrical engineering. J. Electr. Eng. 2012, 63, 255–260. [Google Scholar] [CrossRef]
- Chai, W.; Qiao, J.F. Passive robust fault detection using RBF neural modeling based on set membership identification. Eng. Appl. Artif. Intell. 2014, 28, 1–12. [Google Scholar] [CrossRef]
- Zhu, D.; Gao, Q.W.; Sun, D.; Lu, Y.X.; Peng, S.L. A detection method for bearing faults using null space pursuit and S transform. Signal Process. 2014, 96, 80–89. [Google Scholar] [CrossRef]
- Zhou, J.; Guo, A.H.; Celler, B.; Su, S. Fault detection and identification spanning multiple processes by integrating PCA with neural network. Appl. Soft Comput. 2014, 14, 4–11. [Google Scholar] [CrossRef]
- Harmouche, J.; Delpha, C.; Diallo, D. Incipient fault detection and diagnosis based on Kullback–Leibler divergence using Principal Component Analysis: Part I. Signal Process. 2014, 94, 278–287. [Google Scholar] [CrossRef]
- Zhang, Y.G.; Wang, Z.P.; Zhang, J.F.; Ma, J. Fault localization in electrical power systems: A pattern recognition approach. Int. J. Electr. Power Energy Syst. 2011, 33, 791–798. [Google Scholar] [CrossRef]
- Zhang, Y.G.; Wang, Z.P.; Zhao, S.Q. BDA fault detection in complex electric power systems. Int. Rev. Electr. Eng. 2012, 7, 3638–3645. [Google Scholar]
- Zhang, Y.G.; Wang, Z.P. New fault discrimination under the influence of Rayleigh noise. Adv. Electr. Comput. Eng. 2013, 13, 27–32. [Google Scholar] [CrossRef]
- Zhang, Y.G.; Zhao, Z.; Wang, Z.P. Comprehensive detection and isolation of fault in complicated electrical engineering. Electr. Eng. 2013, 19, 31–34. [Google Scholar] [CrossRef]
- Wand, X.M. Applied Multivariate Analysis; Shanghai University of Finance and Economics Press: Shanghai, China, 2009. [Google Scholar]
- Hair, J.; Joseph, F.; Anderson, R.E.; Tatham, R.L.; Black, W.C. Multivariate Data Analysis; Prentice Hall: Upper Saddle River, NJ, USA, 1998. [Google Scholar]
- Martin, K.E.; Benmouyal, G.; Adamiak, M.G.; Begovic, M. IEEE Standard for Synchrophasors for Power Systems. IEEE Trans. Power Deliv. 1998, 13, 73–77. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Y.; Zhang, Y.; Wang, Y. Research on the Fault Coefficient in Complex Electrical Engineering. Appl. Sci. 2015, 5, 307-319. https://doi.org/10.3390/app5030307
Sun Y, Zhang Y, Wang Y. Research on the Fault Coefficient in Complex Electrical Engineering. Applied Sciences. 2015; 5(3):307-319. https://doi.org/10.3390/app5030307
Chicago/Turabian StyleSun, Yi, Yagang Zhang, and Yinding Wang. 2015. "Research on the Fault Coefficient in Complex Electrical Engineering" Applied Sciences 5, no. 3: 307-319. https://doi.org/10.3390/app5030307