Measuring the Frictional Behavior and Adhesion of PET Bottles


1
Falex Tribology NV, Wingepark 23B, 3110 Rotselaar, Belgium
2
Mechanics of Materials Laboratory, Sector of Mathematics and Engineering Applications, Hellenic Army Academy, 166 72 Vari, Greece
3
Procter & Gamble Services Company S.A., Temselaan 100, 1853 Grimbergen, Belgium
*
Author to whom correspondence should be addressed.
Lubricants 2022, 10(9), 204; https://doi.org/10.3390/lubricants10090204
Submission received: 29 July 2022
/
Revised: 14 August 2022
/
Accepted: 26 August 2022
/
Published: 28 August 2022
(This article belongs to the Special Issue Tribological Design in Real-Life Applications—the Lubricant Perspective)
Abstract
:Polyethylene terephthalate (PET), due to its excellent physical and chemical properties, has become a widely used packaging material for liquids across many consumer market segments. However, one of the most common problems met in bottle manufacturing is the pile-up of bottles during conveying, due to static electrification caused by localized friction. To minimize such phenomena, a thin lubricant layer is applied onto the bottles. The absence of a thin lubricant layer increases the risk of localized sticking phenomena and pileups. In this work, an attempt is made to study the frictional behavior of commercially available PET bottles, with and without lubrication by using a high precision and light load technique. By analyzing the complete tribological pattern of the tangential force and not just averaged values, localized sticking events can be identified. In addition, by performing indentation-retraction measurements the electrostatic forces in a bottle-to-bottle contact can be measured. By combining light load friction and adhesion methods, a better understanding of PET sticking phenomena can be achieved which then can be translated in optimizing (minimizing) the amount of lubricant to be used.
1. Introduction
Polyethylene terephthalate (PET) has become the most favored packaging material world-wide for beverages, and is also widely used for packaging of home and personal products. The reason for this development is the excellent material properties of PET material, especially its fracture toughness and the very low weight when compared to glass bottles of the same filling volume [1]. Based on the annual report by the European plastics producer’s association for 2021 [2], the global plastics production has reached 367 million tons in 2020, of which 55 million tons are in Europe. Most of these polymers are used by the packaging industry (40.5%), followed by the building and construction (20.4%), the automotive (8.8%) and the electrical and electronics (6.2%) industries [2]. Among polymeric materials, PET accounts for 8.4%, making this polymer the fifth in importance (after PP, PE-LD, PE-HD, and PVC). PET is extensively used in packaging to produce bottles/containers for beverages, such as water, soft drinks, or other drinks/juices in the food industry, as well for cleaner packaging, etc. [2].
The high and increasingly growing demand for PET production in the packaging industry means that the production process should also be accelerated, for example, by improving bottle conveying [3]. This can be achieved by modifying the conveyor belt design and type, as well as by increasing the speed of conveying [3]. However, one of the most common problems met in bottle conveying is the piling up of bottles, which results in a temporary halt of the production process and production losses. This phenomenon in PET production is attributed to static electrification in bottle-to-bottle contact, caused by localized friction [4]. To minimize friction phenomena, a popular solution is to apply a thin lubricant layer typically applied by spraying. The absence of a thin lubricant layer increases the risk of localized sticking phenomena and pileups, which is a major drawback in the speed of the production line. To solve this issue new test methods are needed to measure the frictional behavior and adhesion in bottle-to-bottle contacts, that simulate as closely as possible the conditions met during bottle conveying.
To date, the ASTM D1894 method is mainly used in the packaging industry to measure the static and dynamic coefficient of friction between two surfaces, using a horizontal plane and sled [5]. This standard is used for both plastic films (thickness of less than 0.254 mm) and sheets (higher than 0.254 mm). However, it has certain limitations as it is not precise enough to detect localized frictional phenomena such as sticking during sliding due to, e.g., localized lack of lubrication or build-up of static electrification. Indeed, the recently published article by Zhang et al. [4] shows clearly that the use of localized light load test methods such as atomic force microscopy are essential to understand the behavior of polymeric tribo-contacts. Apart from this article, the majority of tribological research performed on PET is done under dry conditions [6] on the macro-scale using large contact areas [7] and high contact pressures that generate wear [8], at high speeds that can generate frictional heating [9], and with metallic [10] or ceramic counter-materials [11], which is not the case for the packaging industry. Furthermore, the scale effect has been reported to have a significant effect on the tribological phenomena [12,13], due to surface and structural modifications. Bhusan et al. [14,15] did fundamental work on the interactions of plastics at the nano-load scale and observed that their wear behavior is directly linked to their nanohardness. They also pointed out that tribological measurements should be made at a relevant scale, due to the fact that surface texture is very different between the nano- and macro- scale. In addition, a recent publication by Jia et al. showed that surface changes can have a strong influence on the nano-tribological properties of materials [16].
Having the above in mind, a test method was developed based on a light load high precision tribometer to measure both the static and dynamic coefficient of friction in the meso-load scale, which is more applicable for the packaging industry and the bottle-bottle/bottle-belt contacts. With this method, the 3D tribological pattern (triboscopy [17]) of the tangential force and not just averaged values, were identified. In addition, by performing indentation-retraction measurements the electrostatic forces in these contacts can be successfully measured. It is believed that the use of these methods will help in obtaining a better understanding of localized frictional phenomena and will help in the optimization of PET bottle production and bottle transport efficiency.
2. Materials and Methods
In this work commercially available PET detergent bottles with a volume of 750 mL were studied, namely clear PET with and without a lubricant layer and opaque white PET without a lubricant layer. The lubricant used was a mixture of ester oils, with a density of 0.98–1.02 g/mL and viscosity of 120–170 mPas. It is widely used in the packaging industry to reduce scratches of plastic surfaces during transport and handling. However, the commercial name cannot be given due to confidentiality issues. The bottles were taken from the same batch to ensure a better repeatability.
Square samples were carefully cut out from the middle part/label panel of these bottles (as indicated in Figure 1a), trying to avoid touching and contaminating the test surface and maintaining its geometrical features (elliptical shape and surface texture). The bottom sample and counter-face strips can be seen in Figure 1b. The bottom sample had dimensions of 80 mm (perpendicular to sliding axis) × 80 mm (along sliding axis) and a calculated curvature of about 80° at the contact point. The counter-material strips had dimensions of 10 mm (perpendicular to sliding axis) × 80 mm (along sliding axis) and the same curvature as the bottom part. All samples were then fixed onto holders with a polymeric component glue.
For the tribological evaluation, a modified Basalt-N2 tribometer with a light load sensor was used. The force sensor is a 1000 mN cantilever with a 1/10,000 full scale resolution, based on the dual leaf spring as shown in Figure 1c. The applied load and potential tangential forces are picked up by a high precision displacement measurement of the spring elements, measured by capacitance sensors (sampling rate of 1000 Hz). To simulate a similar motion and contact conditions as during the relative sliding of the bottles during transferring, a reciprocating sliding motion at light loads (to simulate the low contact pressures) and for small displacements (to simulate vibrations and emphasize static friction) was selected. The optimized test parameters presented in this work are summarized in Table 1. Three combinations were evaluated: (a) clear PET without a lubricant layer sliding against clear PET without lubricant, (b) clear PET with lubricant sliding against clear PET with lubricant and (c) opaque white PET without lubricant sliding against opaque white PET without lubricant layer. For every material combination 5 repeats were performed.
After testing, the electrostatic attraction forces in a bottle-bottle contact were measured with a Falex Tackiness Adhesion Analyzer (TAA) tester. The working principle of this method is based on indentation-retraction curves. During a test, the indenter with the counter-material (PET strip in Figure 1b) is gradually brought into contact with a bottom sample (PET plate in Figure 1b), until a preset contact load of 20 mN is reached. Then, the indenter with the counter-material is gradually moved away from the bottom sample under well-controlled conditions (retraction speed of 0.1 mm/s) until there is complete physical separation. Throughout this motion the force and displacement are recorded, providing the indentation-retraction curve. A complete description of this method can be found in [18]. The experimental parameters for the indentation-retraction tests are summarized in Table 2. For every material combination 5 repeats were performed.
Analysis of the surface topography after testing was performed with a Nanofocus µSurf Explorer Confocal microscope using a ×10 magnifying lens (200–400 confocal images captured per second and resolution in z-axis (height of topographical features) is in the nm range).
3. Results and Discussion
Friction is known to be strongly dependent on the load scale [19]: a transition from macro-, to meso- to nanoscale will result in a change of interaction mechanisms. At smaller length scales molecular interactions and adhesion components of friction contribute to a larger extent than mechanical deformation components [20]. In addition, stiction and capillary interactions become a major factor in the friction force when the contact radius and the contact load decrease significantly [21]. Thus, it is important to study tribological phenomena at their correct load-scale. To simulate the light load localized tribological phenomena that occur in these bottle-bottle contacts, a meso-load approach was employed. It should be noted that the initial contact pressure for the selected conditions is in the range of 5 MPa (calculated with HertzWin software 2.6 (Vink System Design & Analysis, Veldhoven, the Netherlands), whereas in a typical ball-on-disc test operating at macro-load (loads 1–5 N, ball of 5 mm diameter), the initial contact pressures are between 50 to 100 MPa for the same material system.
In Figure 2, the evolution of the average coefficient of friction for the three different tribo-contacts (a-b-c) under meso-load conditions is presented. For the tests without a lubricant layer (Figure 2a,c), a high spread of friction between the five repeat tests can be observed, and the measured coefficient of friction ranges between 0.2–0.6. On the other hand, a much better repeatability was observed between the five repeats when the PET had a lubricant layer (Figure 2b).
To get a better insight on why the average friction fluctuates so much under unlubricated conditions, the 3D tribological pattern (triboscopy) of the friction force during each sliding cycle was analyzed and is presented in Figure 3. Indeed, for clear PET a significant fluctuation can be seen especially during the start of sliding motion in both directions (indicated by red arrow, Figure 3a,b). Such morphologies are characteristic of localized adhesion [22] and thus indicate a risk for potential stick-slip phenomena between the bottles. By applying a thin lubricant layer onto the clear PET the 3D pattern smoothens out and the localized adhesive phenomena (intensity of friction peaks) are significantly reduced (Figure 3c,d).
Opaque white PET without lubricant, despite having a similar spread of the average friction as clear PET without lubricant (Figure 2a versus Figure 2c), exhibits a completely different frictional pattern. A more homogenous distribution of the friction forces during each cycle and throughout the test was measured (Figure 3e,f versus Figure 3a,b). This homogenous distribution of the friction is related more to the surface topography [23] rather than localized adhesive phenomena. Indeed, confocal analysis of the surface prior to testing (Figure 4), showed a higher surface roughness for the opaque white PET (Sa 0.140 µm) than the clear PET (Sa 0.096 µm). In addition, for the opaque white PET asperities can be seen on the surface (indicated by red arrows), whereas for the clear PET only some pores (indicated by blue arrows) and scratches (indicated by black arrows) can be seen. These protruding asperities in the tribo-contact are considered to contribute to fluctuation of the friction force during each sliding cycle (Figure 3e,f). Especially for meso-load measurements the influence of surface topography is more pronounced as the interaction volume is also smaller when compared to macro-load [13]. Furthermore, this example shows that the frictional behavior of a tribo-system should not be based only on average friction values, because averaging suppresses the localized phenomena such as the sticking phenomena shown in Figure 3a,b.
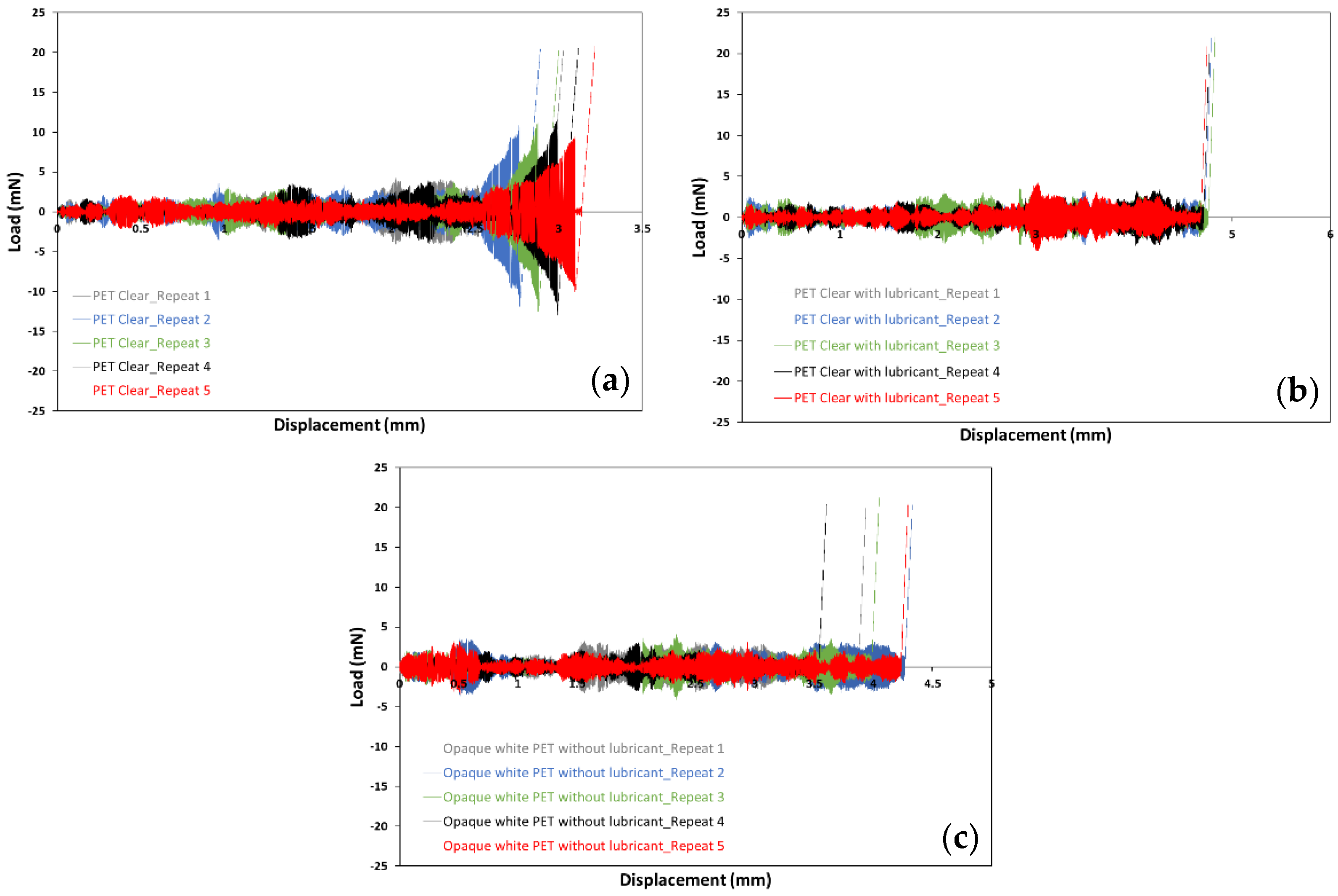
Apart from the risk of localized adhesive phenomena between the contacting bottles, there is also the possibility that bottles charge electrically by friction [4]. This electrification is identified in a contributing factor to bottle pileups in bottle processing systems. For this reason, indentation-retraction tests were performed after each friction test, to investigate the existence of adhesive forces due to electrical charging. The indentation-retraction curves for the three tribo-couples and for all five repeats, are given in Figure 5.
The adhesion force is the lowest negative force in these indentation-retraction curves [18]. For clear PET without a lubricant layer, adhesive forces are in the range of 10–13 mN, Figure 5a. When applying a thin lubricant layer on the PET or when changing clear to opaque white no adhesion forces were measured (within the precision of the sensor of +/− 1 mN). This observation in combination with the absence of sticking phenomena during sliding clearly shows that the risk of bottle pileups during transferring are significantly lower in the case of clear PET with a lubricant and of opaque white PET without lubricant. However, to establish a better understanding on these surface interactions, the authors intent to continue their research and investigate, e.g., the effect of surface structuring, lubrication amount and composition.
4. Conclusions
This work presents a new test approach to study sticking phenomena in the bottle-to-bottle contact during transferring processes such as on conveyors and sliding systems. It consists of two steps, first reciprocating sliding tests at the meso-load scale, followed by indentation-retraction measurements on the same samples. As an example, three different systems were investigated, namely PET clear with and without lubricant and Opaque white PET without lubricant. From this work the following observations were made:
- Higher average friction and higher spread of values were observed when no lubrication was applied. However, the root cause of the fluctuation is completely different between the clear and opaque white PET: in the first case it is due to sticking phenomena and in the second case to surface topographical features (asperities). This can be confirmed by the 3D friction patterns (triboscopy), where the clear PET shows high localized sticking phenomena at the start of the motion, whereas the opaque white PET shows a more homogenous friction throughout the whole cycle.
- Adhesive forces can be seen in the case of clear PET bottles without lubrication, in the retraction part of the identification-retraction curves. When applying a thin lubricant layer on the clear PET or when changing the PET structure from clear to opaque white, no adhesion forces were measured.
- With this new two-step test approach, both the localized sticking phenomena and the adhesion due to electrification (caused by friction) can be evaluated easily. This will help in minimizing the risk of bottle pileups during transferring and can improve production efficiency.
Author Contributions
Method development, E.P.G., D.D., C.G.; Testing, L.M.L., E.P.G.; Data analysis, E.P.G., D.D., C.G.; Writing, E.P.G., D.D.; Review, C.G. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by P&G.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
In this section, you can acknowledge any support given which is not covered by the author contribution or funding sections. This may include administrative and technical support, or donations in kind (e.g., materials used for experiments).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Welle, F. Twenty years of PET bottle to bottle recycling—An overview. Resour. Conserv. Recycl. 2011, 55, 865–875. [Google Scholar] [CrossRef]
- Plastics—The Facts 2021, European Plastics Producers Association Annual Report; Plastics Europe: Bruxelles, Belgium, 2021.
- Brandau, O. Bottles, Preforms and Closures: A Design for PET Packaging, 2nd ed.; Plastic Design Library; Elsevier: Amsterdam, The Netherlands, 2012. [Google Scholar]
- Zhang, J.; Darwish, N.; Coote, M.L.; Ciampi, S. Static Electrification of Plastics under Friction: The Position of Engineering-Grade Polyethylene Terephthalate in the Triboelectric Series. Adv. Eng. Mater. 2020, 22, 1901201. [Google Scholar] [CrossRef]
- ASTM D1894-14; Standard Test Method for Static and Kinetic Coefficients of Friction of Plastic Film and Sheeting. ASTM International: West Conshohocken, PA, USA, 2016.
- Sukumaran, J.; De Pauw, J.; Neis, P.D.; Tóth, L.F.; De Baets, P. Revisiting polymer tribology for heavy duty application. Wear 2017, 376–377, 1321–1332. [Google Scholar] [CrossRef]
- Sierros, K.A.; Kukureka, S.N. Tribological investigation of thin polyester substrates for displays. Wear 2007, 263, 992–999. [Google Scholar] [CrossRef]
- Jozwik, J.; Dziedzic, K.; Barszcz, M.; Pashechko, M. Analysis and comparative assessment of basic tribological properties of selected polymer composites. Materials 2020, 13, 75. [Google Scholar] [CrossRef] [PubMed]
- Tóth, L.F.; Sukumaran, J.; Szebényi, G.; De Baets, P. Tribo-mechanical interpretation for advanced thermoplastics and the effects of wearinduced crystallization. Wear 2019, 440–441, 203083. [Google Scholar] [CrossRef]
- Filippova, E.O.; Filippov, A.V.; Shulepov, I.A. Experimental study of sliding friction for PET track membranes. IOP Conf. Ser. Mater. Sci. Eng. 2016, 125, 012020. [Google Scholar] [CrossRef]
- Liu, Y.; Song, S.; Timmers, H. Correlation of polymer wear-debris generation between microscratching and macroscopic wear. Tribol. Int. 2016, 93, 202–213. [Google Scholar] [CrossRef]
- Samyn, P.; Van Craenenbroeck, J.; Quintelier, J.; Schoukens, G. Friction induced conformational changes on large-scale and small-scale polyester sliding surfaces. Surf. Interface Anal. 2006, 38, 868–872. [Google Scholar] [CrossRef]
- Samyn, P.; Schoukens, G. Tribophyiscal scaling effects in friction and wear of polymers on small- and large-scale tests. Tribotest 2008, 14, 207–224. [Google Scholar] [CrossRef]
- Cho, D.-H.; Bhushan, B.; Dyess, J. Mechanisms of static and kinetic friction of polypropylene, polyethylene terephthalate, and high-density polyethylene pairs during sliding. Tribol. Int. 2016, 94, 165–175. [Google Scholar] [CrossRef]
- Cho, D.-H.; Bhushan, B. Nanofriction and nanowear of polypropylene, polyethylene terephthalate, and high-density polyethylene during sliding. Wear 2016, 352–353, 18–23. [Google Scholar] [CrossRef]
- Jia, Q.; He, W.; Hua, D.; Zhou, Q.; Du, Y.; Ren, Y.; Lu, Z.; Wang, H.; Zhou, F.; Wang, J. Effects of structure relaxation and surface oxidation on nanoscopic wear behaviors of metallic glass. Acta Mater. 2022, 232, 117934. [Google Scholar] [CrossRef]
- Belin, M.; Martin, J.M. Triboscopy, a new approach to surface degradations of thin films. Wear 1992, 156, 151–160. [Google Scholar] [CrossRef]
- Georgiou, E.P.; Drees, D.; De Bilde, M.; Anderson, M.; Carlstedt, M.; Mollenhauer, O. Quantification of Tackiness of a Grease: The Road to a Method. Lubricants 2021, 9, 32. [Google Scholar] [CrossRef]
- Rymuza, Z.; Pytko, S. The Effect of Scale in Tribological Testing. J. Mater. Res. Technol. 2012, 1, 13–20. [Google Scholar] [CrossRef]
- Achanta, S.; Celis, J.-P. On the scale dependence of coefficient of friction in unlubricated sliding contacts. Wear 2010, 269, 435–442. [Google Scholar] [CrossRef]
- Achanta, S.; Liskiewicz, T.; Drees, D.; Celis, J.-P. Friction mechanisms at the micro-scale. Tribol. Int. 2009, 42, 1792–1799. [Google Scholar] [CrossRef]
- Drees, D.; Celis, J.-P.; Achanta, S. Friction of thin coatings on three length scales under reciprocating sliding. Surf. Coat. Technol. 2004, 188–189, 511–518. [Google Scholar] [CrossRef]
- Achanta, S.; Drees, D.; Celis, J.-P. Investigation of Friction in the Meso Normal Force Range on DLC and TiN Coatings. J. ASTM Int. 2007, 4, 1–12. [Google Scholar] [CrossRef]
Figure 1.
(a) Examined area from which samples were cut out. (b) Bottom sample and counter-material strips. (c) Dual spring 1000 mN 2D-force sensor and (d) tribocontact (crossed-cylinder geometry of cut out strips).
Figure 1.
(a) Examined area from which samples were cut out. (b) Bottom sample and counter-material strips. (c) Dual spring 1000 mN 2D-force sensor and (d) tribocontact (crossed-cylinder geometry of cut out strips).
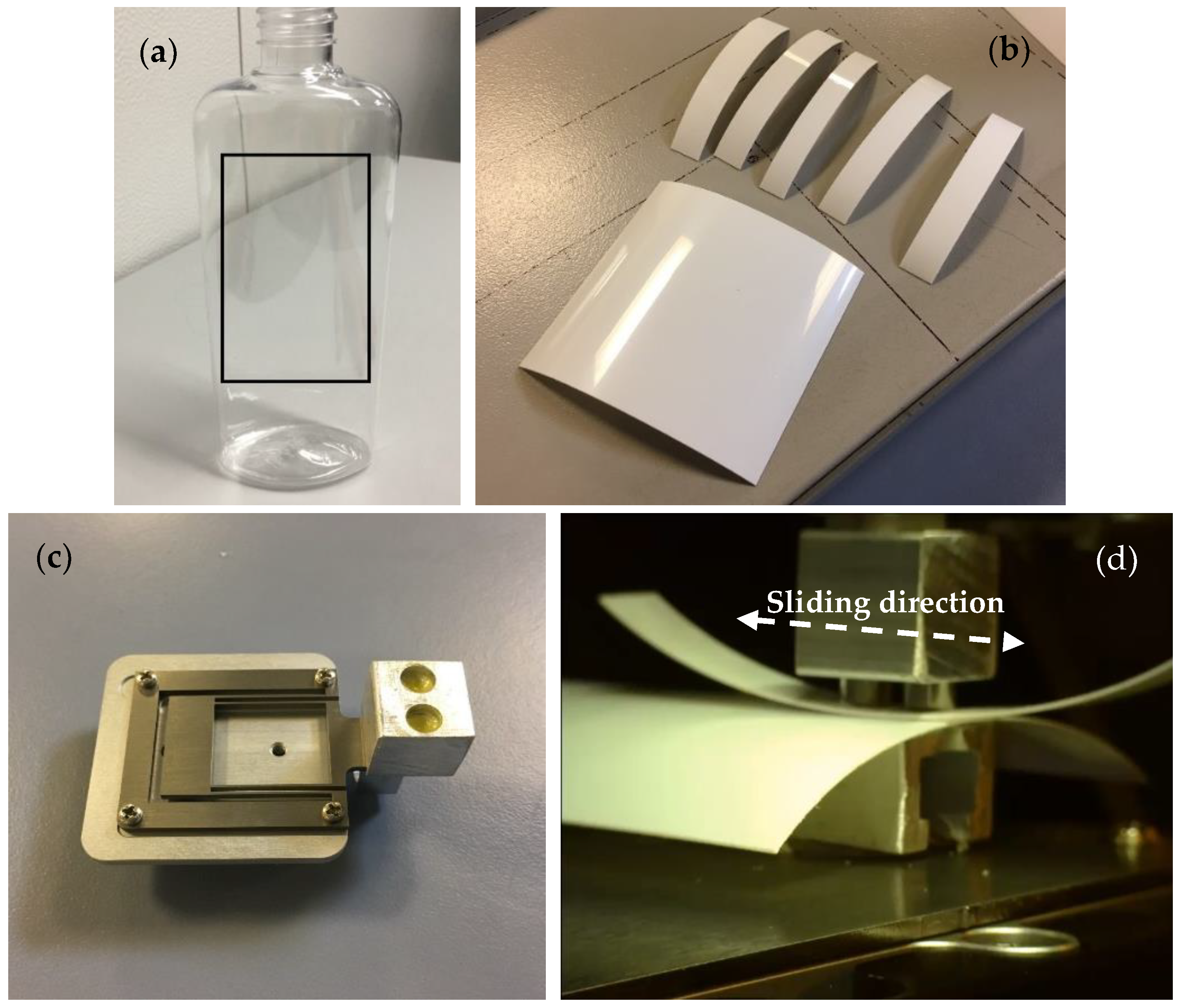
Figure 2.
Evolution of coefficient of friction for (a) PET clear without lubricant vs PET clear without lubricant, (b) PET clear with lubricant vs PET clear with lubricant and (c) Opaque white PET vs Opaque white PET without lubricant.
Figure 2.
Evolution of coefficient of friction for (a) PET clear without lubricant vs PET clear without lubricant, (b) PET clear with lubricant vs PET clear with lubricant and (c) Opaque white PET vs Opaque white PET without lubricant.
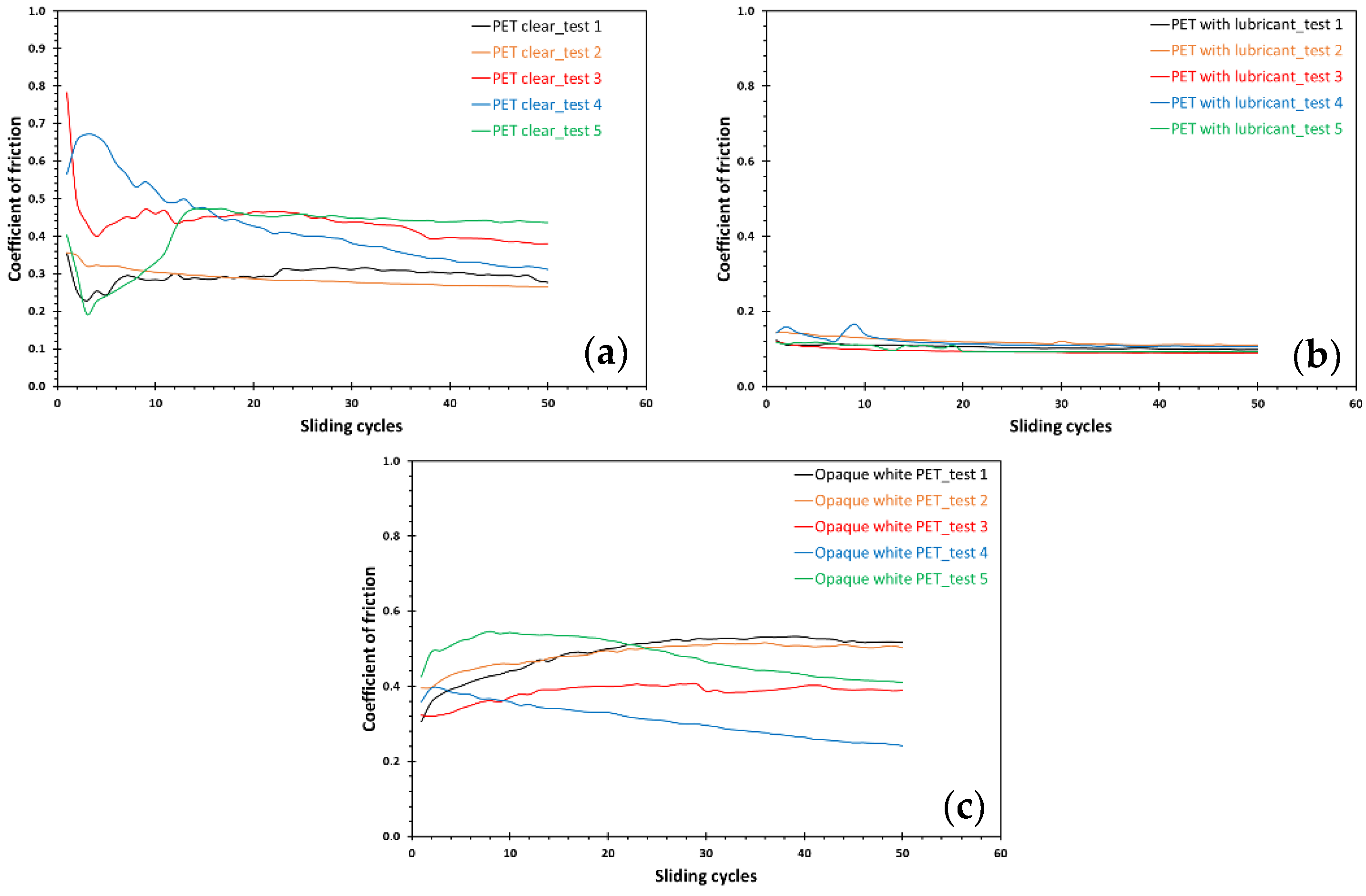
Figure 3.
Example of evolution of (a) 2D and (b) 3D tangential force during reciprocating sliding of PET clear without lubricant vs PET clear without lubricant. Evolution of (c) 2D and (d) 3D tangential force during reciprocating sliding of PET clear with lubricant vs PET clear with lubricant. Evolution of (e) 2D and (f) 3D tangential force during reciprocating sliding of Opaque white PET without lubricant vs Opaque white PET without lubricant.
Figure 3.
Example of evolution of (a) 2D and (b) 3D tangential force during reciprocating sliding of PET clear without lubricant vs PET clear without lubricant. Evolution of (c) 2D and (d) 3D tangential force during reciprocating sliding of PET clear with lubricant vs PET clear with lubricant. Evolution of (e) 2D and (f) 3D tangential force during reciprocating sliding of Opaque white PET without lubricant vs Opaque white PET without lubricant.
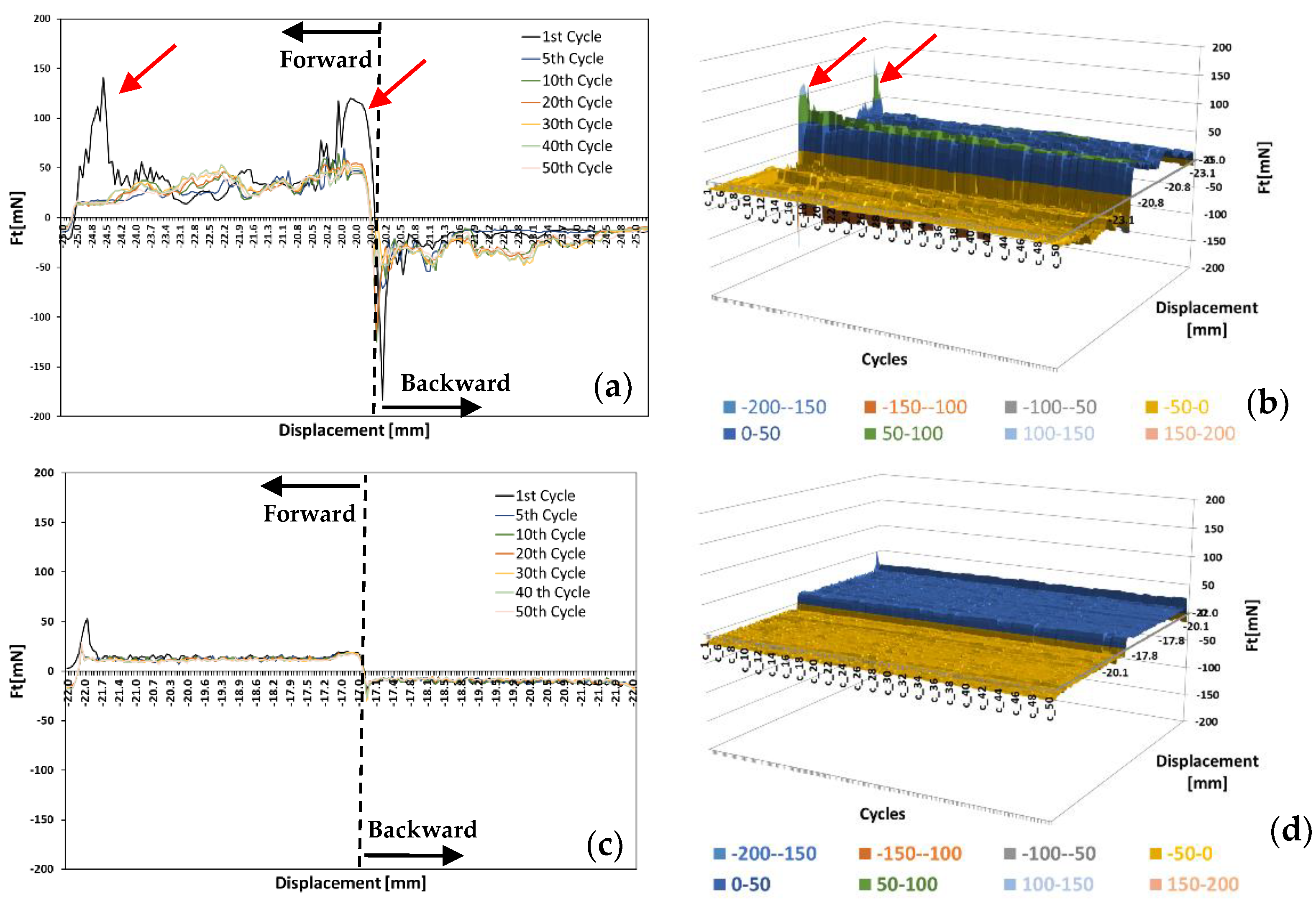
Figure 4.
Surface topography of (a) clear PET and (b) opaque white PET.
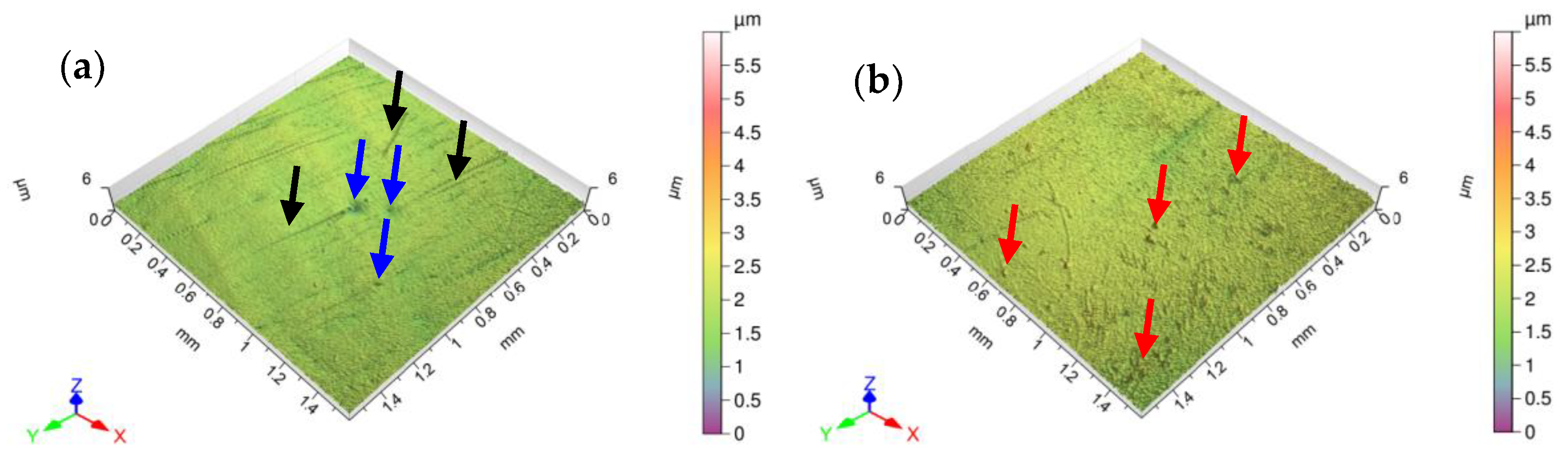
Figure 5.
Indentation-retraction curves for (a) PET clear without lubricant vs PET clear without lubricant, (b) PET clear with lubricant vs PET clear with lubricant and (c) Opaque white PET without lubricant vs Opaque white PET without lubricant.
Figure 5.
Indentation-retraction curves for (a) PET clear without lubricant vs PET clear without lubricant, (b) PET clear with lubricant vs PET clear with lubricant and (c) Opaque white PET without lubricant vs Opaque white PET without lubricant.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Experimental parameters for reciprocating sliding tests.
| Contact Geometry: | Crossed Cylinder |
|---|---|
| Applied load (mN): | 100 |
| Nominal sliding speed (mm/s): | 1 |
| Stroke (one way) (mm): | 5 |
| Acceleration time (s): | 0.1 |
| Number of cycles: | 50 |
Table 2.
Experimental parameters for indentation-retraction tests.
| Contact Geometry: | Crossed Cylinder |
|---|---|
| Applied load (mN): | 20 |
| Approach speed (mm/s): | 0.01 |
| Retraction speed (mm/s): | 0.1 |
| Retraction distance (mm): | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Georgiou, E.P.; Drees, D.; Lopes, L.M.; Gerlach, C. Measuring the Frictional Behavior and Adhesion of PET Bottles. Lubricants 2022, 10, 204. https://doi.org/10.3390/lubricants10090204
AMA Style
Georgiou EP, Drees D, Lopes LM, Gerlach C. Measuring the Frictional Behavior and Adhesion of PET Bottles. Lubricants. 2022; 10(9):204. https://doi.org/10.3390/lubricants10090204
Chicago/Turabian StyleGeorgiou, Emmanuel P., Dirk Drees, Lais M. Lopes, and Christian Gerlach. 2022. "Measuring the Frictional Behavior and Adhesion of PET Bottles" Lubricants 10, no. 9: 204. https://doi.org/10.3390/lubricants10090204
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.