

Design Optimization of Alloy Wheels Based on a Dynamic Cornering Fatigue Test Using Finite Element Analysis and Multi-Additional Sampling of Efficient Global Optimization

Abstract
:1. Introduction
2. Multi-Objective Efficient Global Optimization
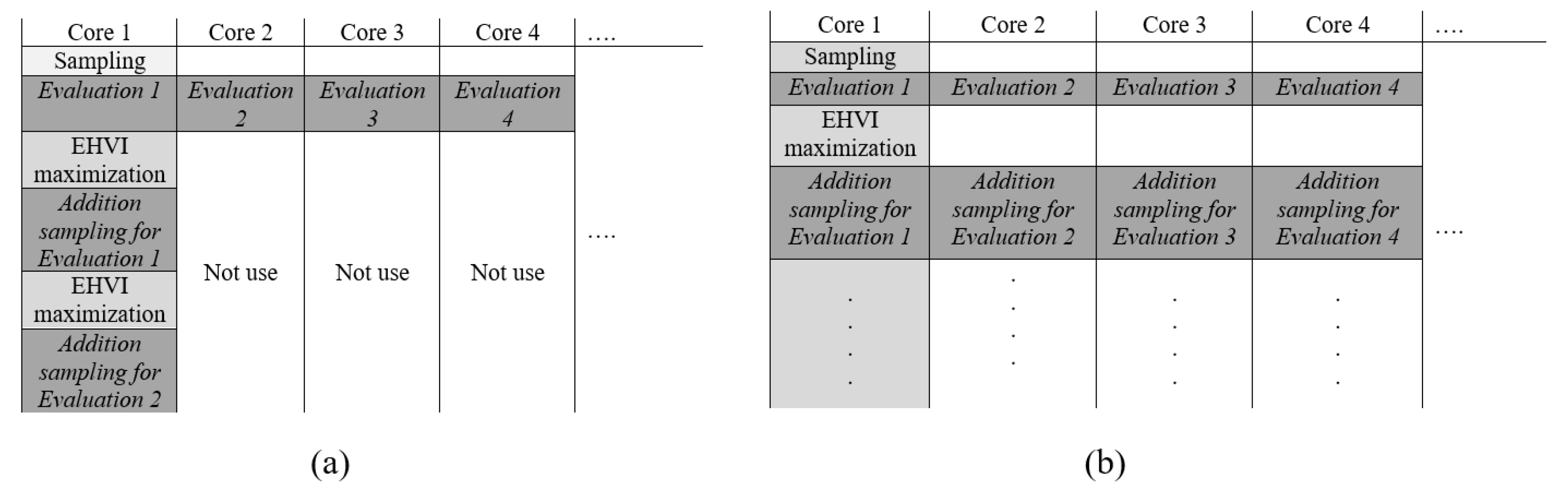
2.1. Multi-Additional Sampling
2.2. Kriging Method
2.3. Genetic Algorithm
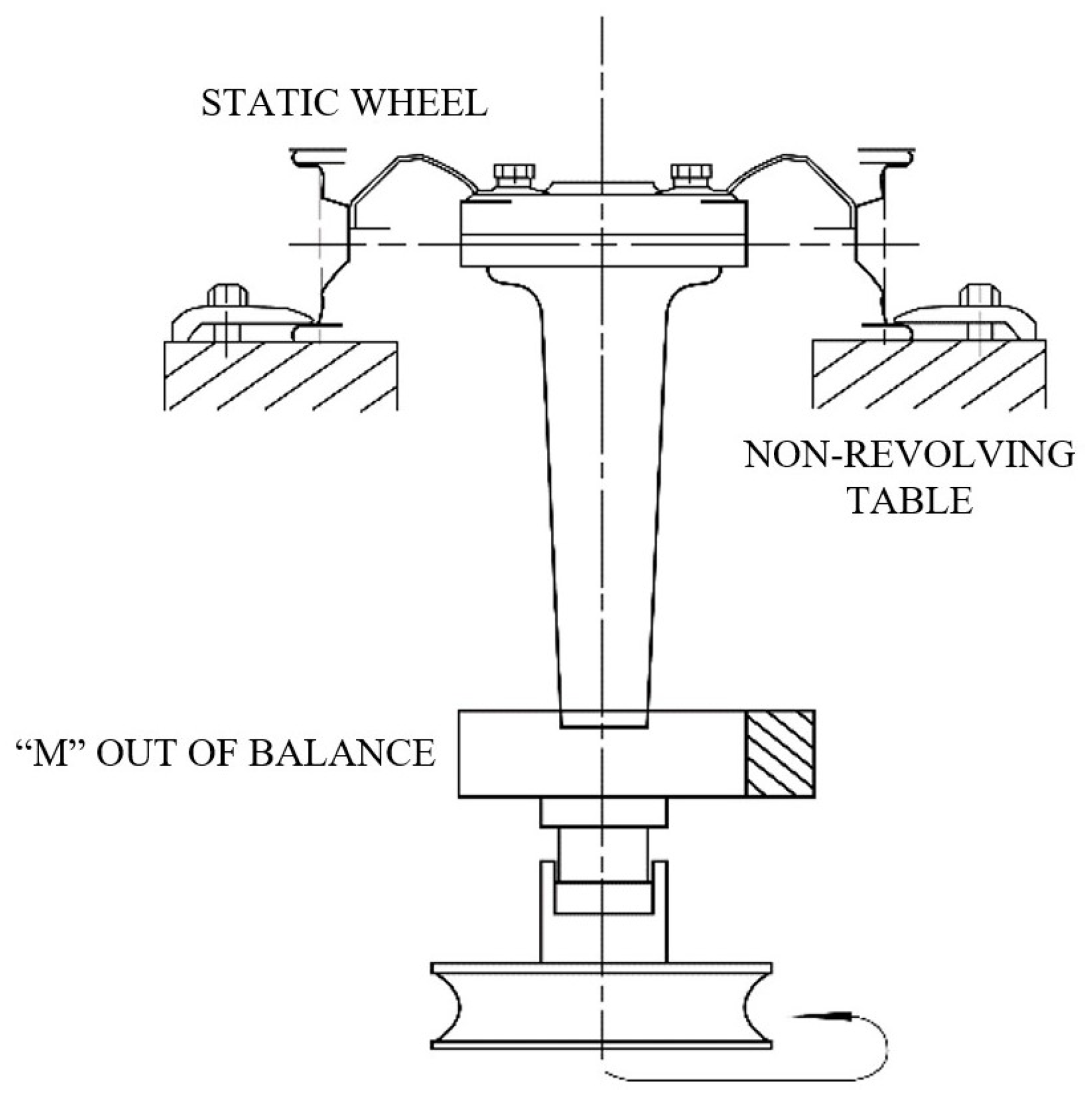
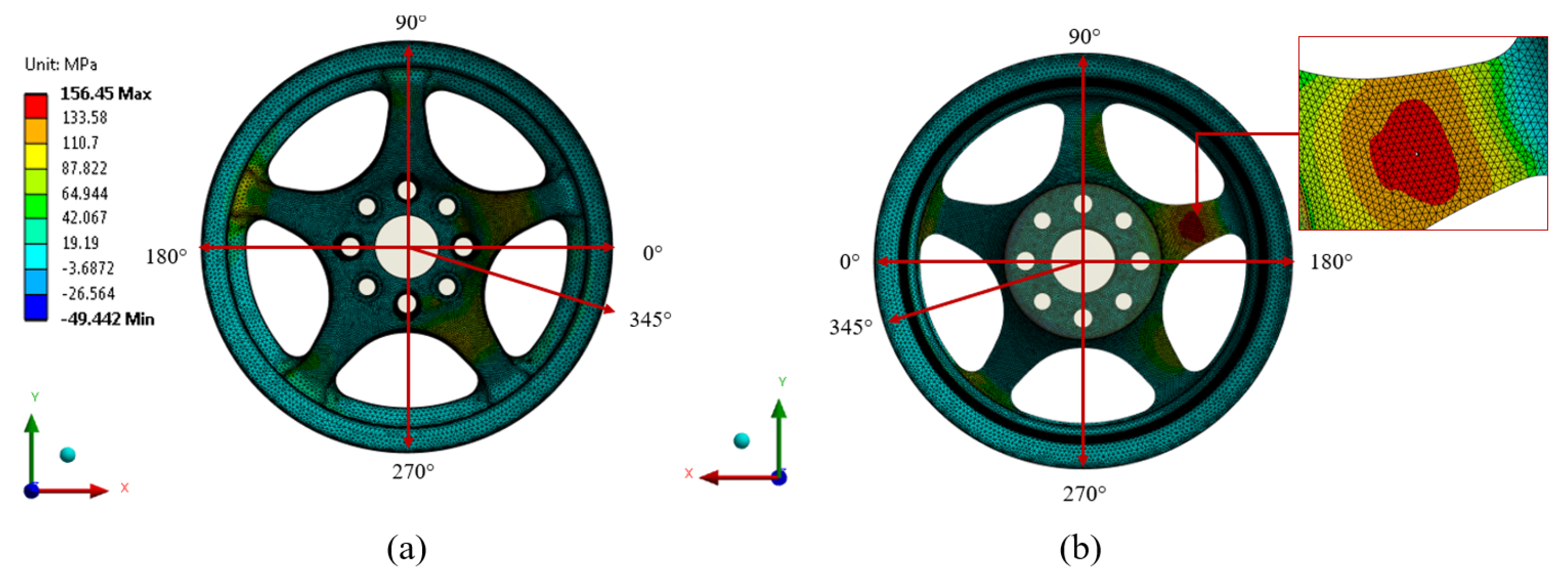
3. Dynamic Cornering Fatigue Analysis
4. Materials and Methods
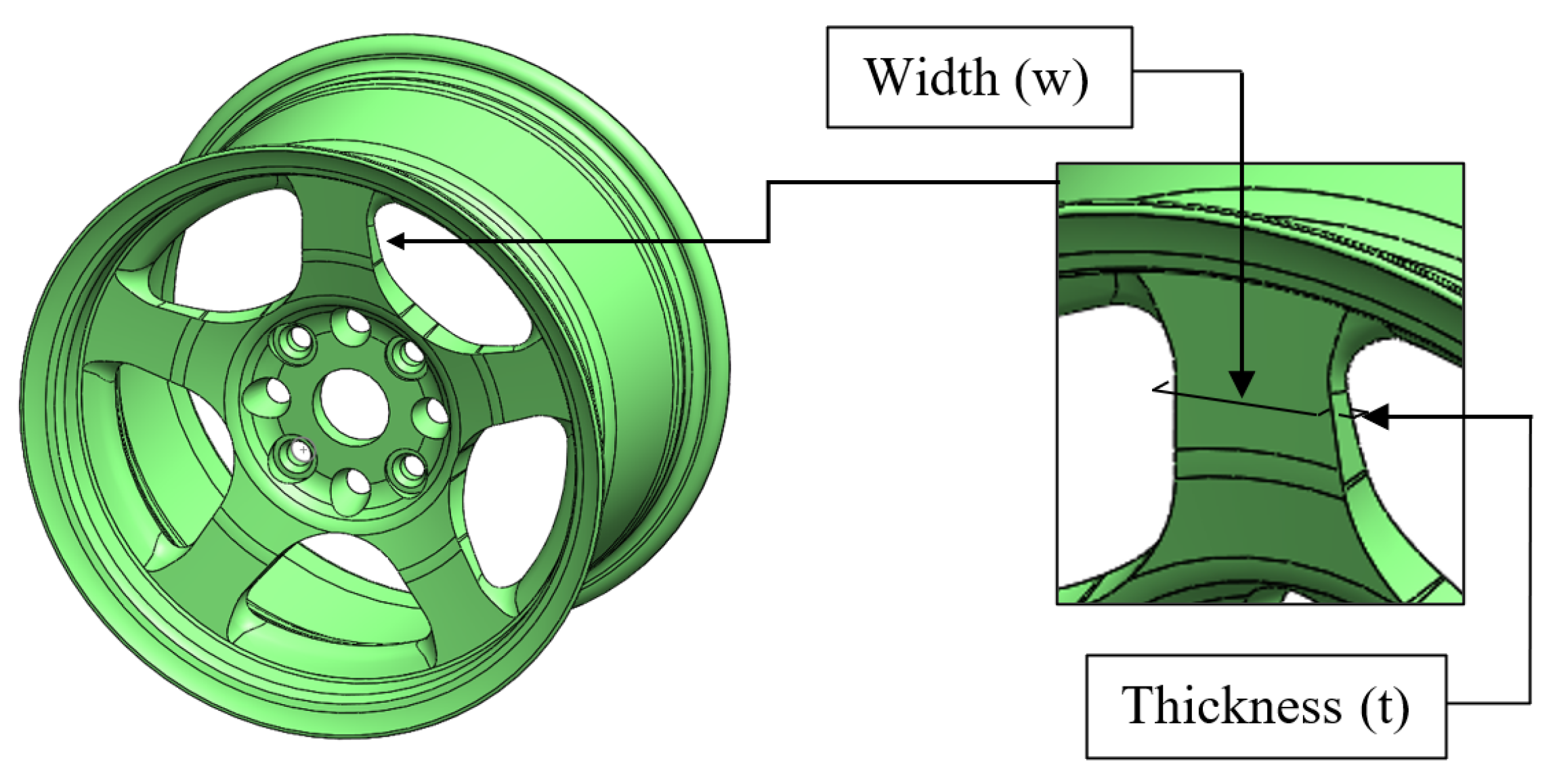
4.1. Design of Experiment
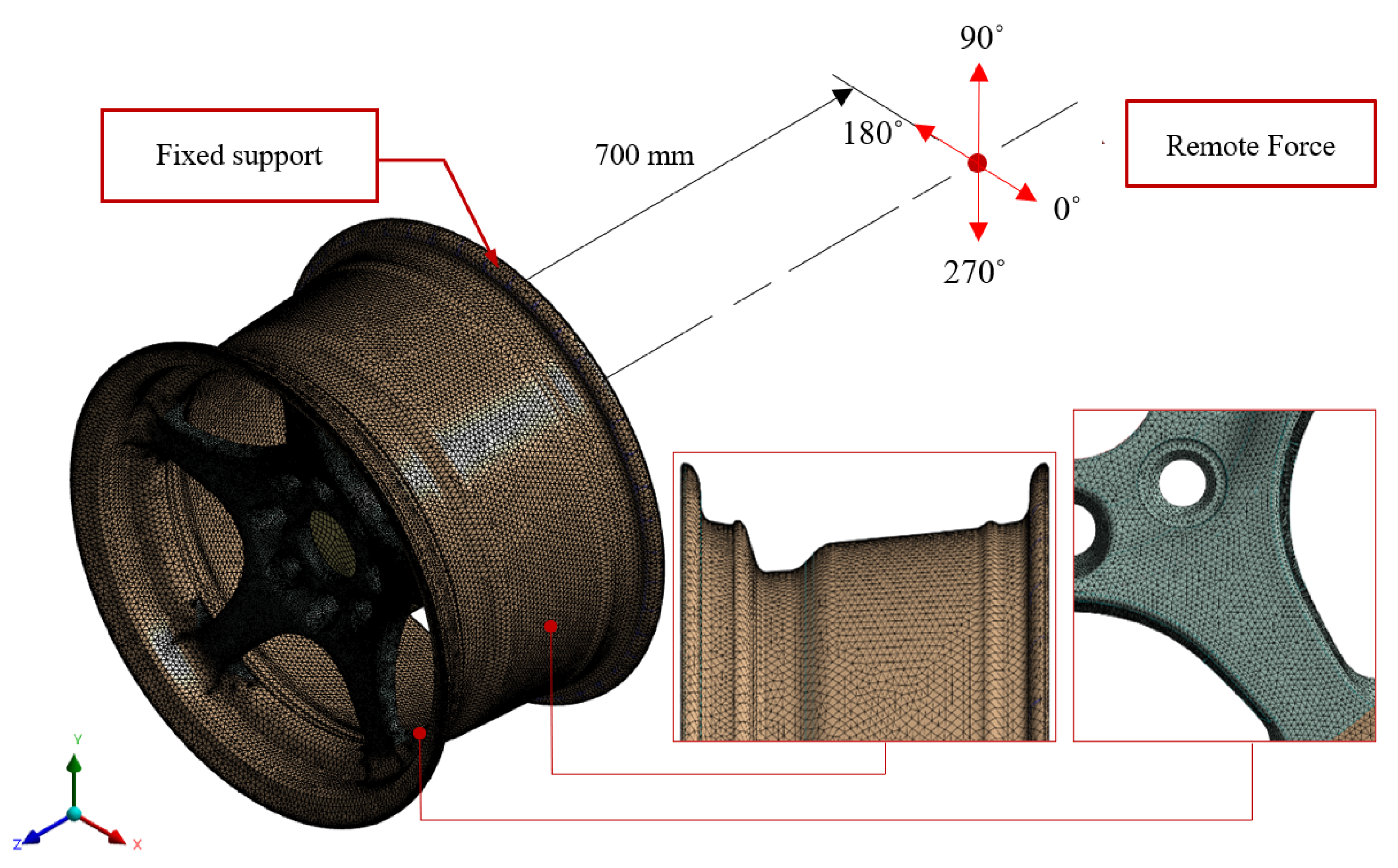
4.2. Finite Element Simulation
4.3. Surrogate Model and Data Improvement
Surrogate Model
4.4. Data Improvement
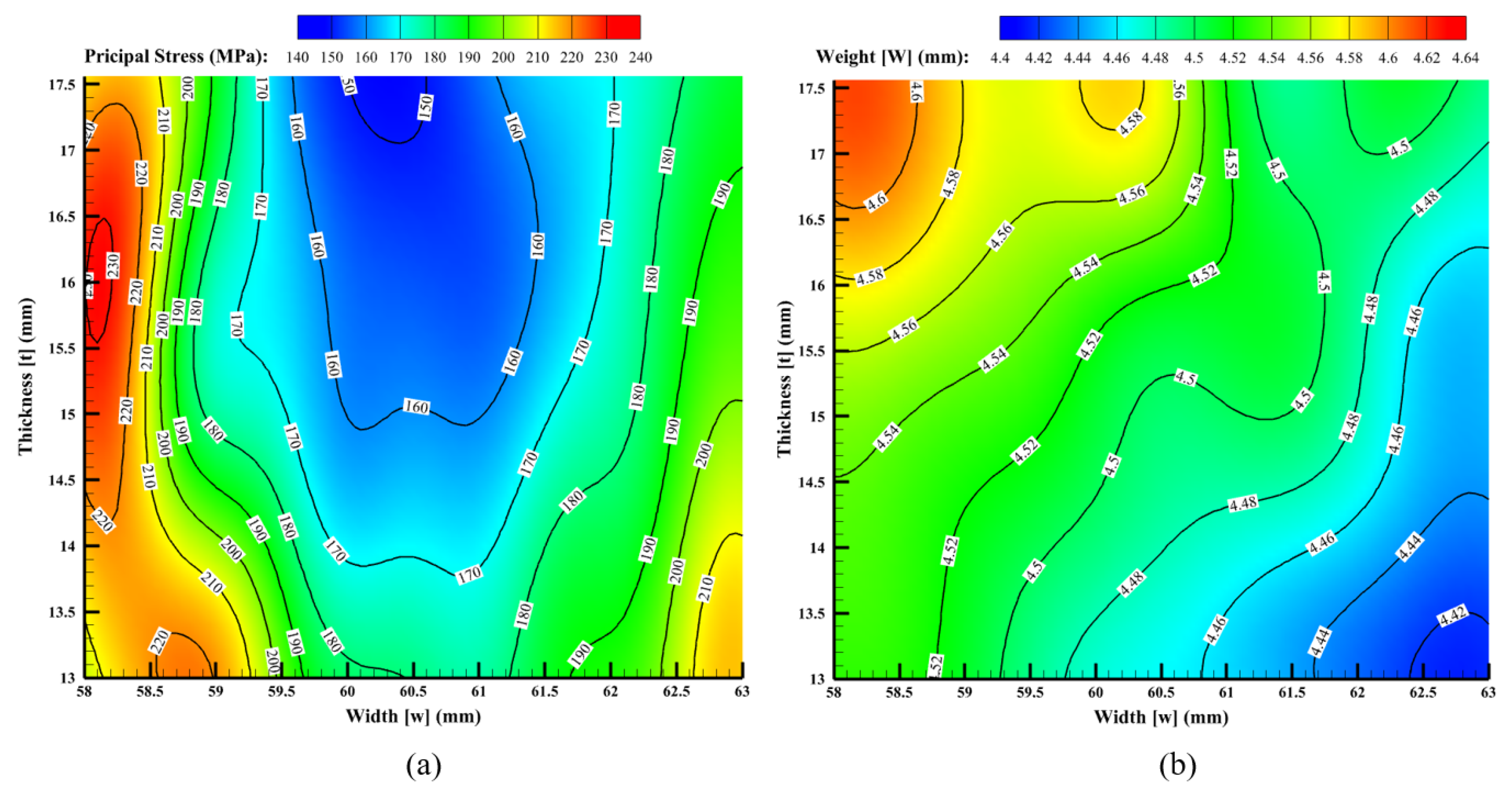
5. Results and Discussion
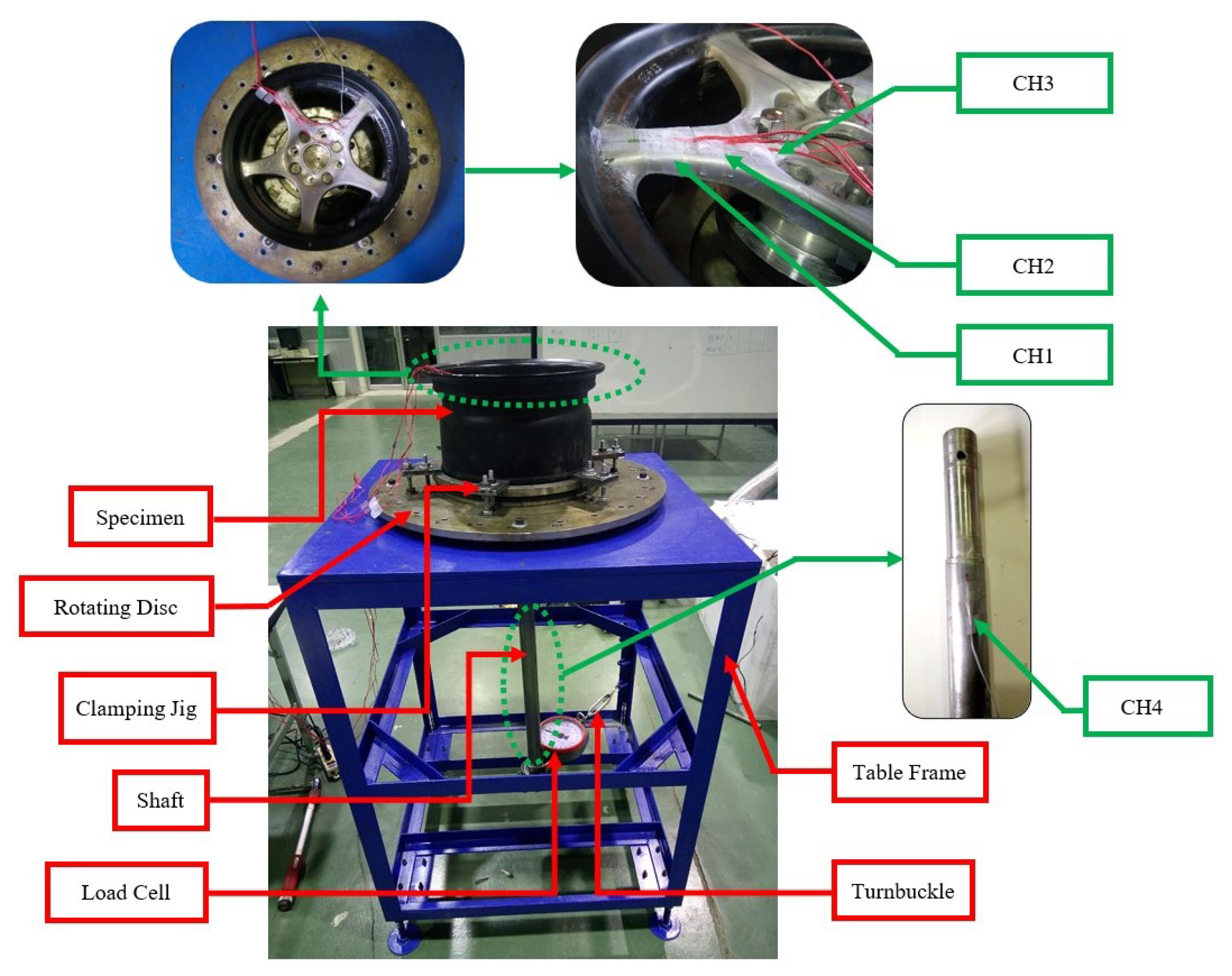
6. Mechanical Validation of Finite Element Simulation
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mandage, A.; Sharma, M.; Rayate, A.; Kange, P.; Hirulkar, N. Fatigue Life Estimation of an Aluminium Wheel Rim Using Finite Element Analysis. Int. J. Sci. Adv. Res. Technol. 2016, 2, 30–33. [Google Scholar]
- Rao, K.S.; Rajesh, M.; Babu, G.S. Design and analysis of alloy wheels. Int. Res. J. Eng. Technol. 2017, 7, 2036–2042. [Google Scholar]
- Das, S. Design and weight optimization of aluminum alloy wheel. Int. J. Sci. Res. Publ. 2014, 4, 1–12. [Google Scholar]
- Raju, P.R.; Satyanarayana, B.; Ramji, K.; Babu, K.S. Evaluation of fatigue life of aluminium alloy wheels under bending loads. Fatigue Fract. Eng. Mater. Struct. 2009, 32, 119–126. [Google Scholar] [CrossRef]
- Wang, L.; Chen, Y.; Wang, C.; Wang, Q. Fatigue life analysis of aluminum wheels by simulation of rotary fatigue test. Stroj. Vestn. J. Mech. Eng. 2011, 57, 31–39. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, X. Simulation of dynamic cornering fatigue test of a steel passenger car wheel. Int. J. Fatigue 2010, 32, 434–442. [Google Scholar] [CrossRef]
- Dong, Z.; Wang, X.; Zhang, X.; Lou, W.; Huang, Y.; Zhong, M. Fatigue life prediction for the steel passenger car wheel in the dynamic cornering fatigue test. Strength Mater. 2020, 52, 662–682. [Google Scholar] [CrossRef]
- Burande, D.; Kazi, T. Fatigue analysis of alloy wheel for passenger car under radial load. Int. J. Eng. Res. Gen. Sci. 2016, 4, 26–36. [Google Scholar]
- Thakare, R. Stress analysis in wheel rim by using dynamic cornering fatigue test under different conditions. Int. J. Adv. Res. Innov. Ideas Educ. 2017, 3, 4863–4868. [Google Scholar]
- Jones, D.R.; Schonlau, M.; Welch, W.J. Efficient global optimization of expensive black-box functions. J. Glob. Optim. 1998, 13, 455–492. [Google Scholar] [CrossRef]
- Bano, G.; Wang, Z.; Facco, P.; Bezzo, F.; Barolo, M.; Ierapetritou, M. A novel and systematic approach to identify the design space of pharmaceutical processes. Comput. Chem. Eng. 2018, 115, 309–322. [Google Scholar] [CrossRef]
- Wang, Z.; Escotet-Espinoza, M.S.; Singh, R.; Ierapetritou, M. Surrogate-based optimization for pharmaceutical manufacturing processes. In Computer Aided Chemical Engineering; Elsevier: Amsterdam, The Netherlands, 2017; Volume 40, pp. 2797–2802. [Google Scholar]
- Bureerat, S.; Sleesongsom, S. Constraint handling technique for four-bar linkage path generation using self-adaptive teaching—Learning-based optimization with a diversity archive. Eng. Optim. 2021, 53, 513–530. [Google Scholar] [CrossRef]
- Preedawiphat, P.; Mahayotsanun, N.; Sucharitpwatskul, S.; Funazuka, T.; Takatsuji, N.; Bureerat, S.; Dohda, K. Finite element analysis of grain size effects on curvature in micro-extrusion. Appl. Sci. 2020, 10, 4767. [Google Scholar] [CrossRef]
- Wiangkham, A.; Aengchuan, P.; Kasemsri, R.; Pichitkul, A.; Tantrairatn, S.; Ariyarit, A. Improvement of Mixed-Mode I/II Fracture Toughness Modeling Prediction Performance by Using a Multi-Fidelity Surrogate Model Based on Fracture Criteria. Materials 2022, 15, 8580. [Google Scholar] [CrossRef] [PubMed]
- Petcharat, N.; Wiangkham, A.; Pichitkul, A.; Tantrairatn, S.; Aengchuan, P.; Bureerat, S.; Banpap, S.; Khunthongplatprasert, P.; Ariyarit, A. The multi-objective optimization of material properties of 3D print onyx/carbon fiber composites via surrogate model. Mater. Today Commun. 2023, 37, 107362. [Google Scholar] [CrossRef]
- Takian, W.; Rooppakhun, S.; Ariyarit, A.; Sucharitpwatskul, S. Optimal Conformity Design of Tibial Insert Component Based on ISO Standard Wear Test Using Finite Element Analysis and Surrogate Model. Symmetry 2021, 13, 2377. [Google Scholar] [CrossRef]
- Kishi, Y.; Yashiro, R.; Kanazaki, M. Low-Boom Design for Supersonic Transport with Canard and Forward-Swept Wings Using Equivalent Area Design Method. Aerospace 2023, 10, 717. [Google Scholar] [CrossRef]
- Lin, Q.; Gong, L.; Zhang, Y.; Kou, M.; Zhou, Q. A probability of improvement-based multi-fidelity robust optimization approach for aerospace products design. Aerosp. Sci. Technol. 2022, 128, 107764. [Google Scholar] [CrossRef]
- Cinquegrana, D.; Iuliano, E. Efficient global optimization method for multipoint airfoil Design. In Advances in Evolutionary and Deterministic Methods for Design, Optimization and Control in Engineering and Sciences; Springer: Berlin/Heidelberg, Germany, 2019; pp. 95–114. [Google Scholar]
- Viana, F.; Haftka, R.; Venter, G.; Hamman, R. Efficient global optimization with experimental data: Revisiting the paper helicopter design. In Proceedings of the 52nd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference 19th AIAA/ASME/AHS Adaptive Structures Conference 13t AIAA Non-Deterministic, Denver, CO, USA, 4–7 April 2011; p. 2099. [Google Scholar]
- Haftka, R.T.; Villanueva, D.; Chaudhuri, A. Parallel surrogate-assisted global optimization with expensive functions—A survey. Struct. Multidiscip. Optim. 2016, 54, 3–13. [Google Scholar] [CrossRef]
- Ariyarit, A.; Phiboon, T.; Kanazaki, M.; Bureerat, S. The effect of multi-additional sampling for multi-fidelity efficient global optimization. Symmetry 2020, 12, 1499. [Google Scholar] [CrossRef]
- Kanazaki, M.; Imamura, T.; Matsuno, T.; Chiba, K. Multiple additional sampling by expected improvement maximization in efficient global optimization for real-world design problems. In Proceedings of the Intelligent and Evolutionary Systems: The 20th Asia Pacific Symposium, IES 2016, Canberra, Australia, November 2016; Springer: Berlin/Heidelberg, Germany, 2017; pp. 183–194. [Google Scholar]
- Matheron, G. Principles of geostatistics. Econ. Geol. 1963, 58, 1246–1266. [Google Scholar] [CrossRef]
- Moore, R. Geostatistics in Hydrology: Kriging Interpolation; Tech. Rep.; Mathematics Department, Macquarie University: Sydney, Australia, 1999. [Google Scholar]
- Holland, J.H. Genetic algorithms. Sci. Am. 1992, 267, 66–73. [Google Scholar] [CrossRef]
- ISO 3006:2015; Road Vehicles—Passenger Car Wheels for Road Use—Test Methods. ISO: Geneva, Switzerland, 2015.
- Ahmad, M.; Sivanesan, T.; Mahmud, A. Structural optimization of alloy wheel rim using design of experiments. Int. J. Veh. Struct. Syst. 2018, 10, 122–126. [Google Scholar] [CrossRef]
- Husslage, B.G.; Rennen, G.; Van Dam, E.R.; Den Hertog, D. Space-filling Latin hypercube designs for computer experiments. Optim. Eng. 2011, 12, 611–630. [Google Scholar] [CrossRef]
- Loh, W.L. On Latin hypercube sampling. Ann. Stat. 1996, 24, 2058–2080. [Google Scholar] [CrossRef]
- Chen, X.; Liu, Y. Finite Element Modeling and Simulation with ANSYS Workbench; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Shigley, J.E.; Mitchell, L.D.; Saunders, H. Mechanical Engineering Design. J. Mech. Trans. Autom. 1985, 107, 145. [Google Scholar] [CrossRef]
- Norton, R.L. Machine Design; Prentice Hall: London, UK, 2010. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Si | Fe | Mg | Ti | Sr |
|---|---|---|---|---|
| 6.5–7.5% | <0.15% | 0.27–0.29% | 0.1–0.15% | 0.005–0.0155% |
| Property | Yield Strength | Ultimate Strength | Elongation | Modulus of Elasticity |
|---|---|---|---|---|
| (MPa) | (MPa) | (%) | (GPa) | |
| 220 | 265 | 3 | 70 |
| Iteration | No. | Width: w | Thickness: t | Principle | Weight |
|---|---|---|---|---|---|
| Sampling | (mm) | (mm) | Stress (MPa) | (kg) | |
| 31 | 62.59079 | 13.0003 | 212.3612 | 4.41644 | |
| 1 | 32 | 61.11105 | 14.43483 | 167.0227 | 4.47476 |
| 33 | 61.34294 | 13.85585 | 176.4588 | 4.45779 | |
| 34 | 61.99754 | 13.00002 | 199.0943 | 4.42878 | |
| 2 | 35 | 60.91956 | 14.99054 | 160.1323 | 4.49212 |
| 36 | 60.63268 | 16.63042 | 152.9984 | 4.52772 | |
| 37 | 61.23932 | 14.14289 | 173.8995 | 4.46194 | |
| 3 | 38 | 60.59958 | 17.19233 | 151.2951 | 4.54639 |
| 39 | 61.52394 | 13.653 | 182.1939 | 4.44935 | |
| 40 | 62.9134 | 13.0004 | 222.6176 | 4.4083 | |
| 4 | 41 | 61.60852 | 15.8109 | 163.6573 | 4.49525 |
| 42 | 61.00742 | 14.72151 | 163.2752 | 4.48355 | |
| 43 | 62.27858 | 13.0000 | 189.2561 | 4.4413 | |
| 5 | 44 | 61.78113 | 13.12851 | 191.8577 | 4.43697 |
| 45 | 62.83157 | 13.02221 | 217.3689 | 4.41237 | |
| 46 | 62.2888 | 13.00558 | 207.6239 | 4.42054 | |
| 6 | 47 | 60.82259 | 15.51454 | 157.7641 | 4.50077 |
| 48 | 61.20637 | 14.21846 | 169.126 | 4.47055 | |
| 49 | 60.64988 | 16.47167 | 152.9984 | 4.52772 | |
| 7 | 50 | 62.16986 | 13.00006 | 203.1897 | 4.42465 |
| 51 | 60.57336 | 17.99858 | 150.0935 | 4.56472 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ariyarit, A.; Rooppakhun, S.; Puangchaum, W.; Phiboon, T. Design Optimization of Alloy Wheels Based on a Dynamic Cornering Fatigue Test Using Finite Element Analysis and Multi-Additional Sampling of Efficient Global Optimization. Symmetry 2023, 15, 2169. https://doi.org/10.3390/sym15122169
Ariyarit A, Rooppakhun S, Puangchaum W, Phiboon T. Design Optimization of Alloy Wheels Based on a Dynamic Cornering Fatigue Test Using Finite Element Analysis and Multi-Additional Sampling of Efficient Global Optimization. Symmetry. 2023; 15(12):2169. https://doi.org/10.3390/sym15122169
Chicago/Turabian StyleAriyarit, Atthaphon, Supakit Rooppakhun, Worawat Puangchaum, and Tharathep Phiboon. 2023. "Design Optimization of Alloy Wheels Based on a Dynamic Cornering Fatigue Test Using Finite Element Analysis and Multi-Additional Sampling of Efficient Global Optimization" Symmetry 15, no. 12: 2169. https://doi.org/10.3390/sym15122169