Figure 1.
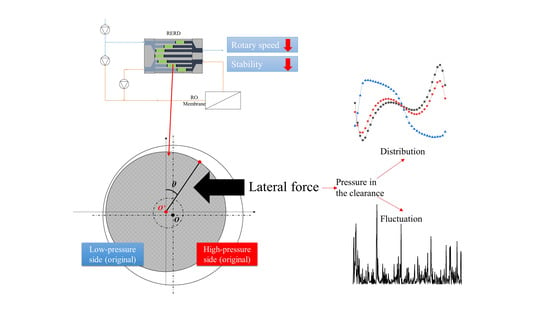
RERD in RO system(blue part is high-pressure and red part is low-pressure).
Figure 1.
RERD in RO system(blue part is high-pressure and red part is low-pressure).
Figure 2.
Structure and working process of RERD. (a) Structure; (b) working process.
Figure 2.
Structure and working process of RERD. (a) Structure; (b) working process.
Figure 3.
Clearance between rotor and sleeve and the liquid film filling it.
Figure 3.
Clearance between rotor and sleeve and the liquid film filling it.
Figure 4.
Axis section view of rotor and clearance and diagram of lateral force direction.
Figure 4.
Axis section view of rotor and clearance and diagram of lateral force direction.
Figure 5.
Flow domain model of RERD and distribution of the sampling points. (a) End covers and rotor channels; (b) model with clearance and sampling points; (c) 3 sampling point circumferences; (d) number of circumferential sampling points.
Figure 5.
Flow domain model of RERD and distribution of the sampling points. (a) End covers and rotor channels; (b) model with clearance and sampling points; (c) 3 sampling point circumferences; (d) number of circumferential sampling points.
Figure 6.
Mesh model (clearance part is not shown in the left side).
Figure 6.
Mesh model (clearance part is not shown in the left side).
Figure 7.
Lateral force magnitude within one rotating cycle.
Figure 7.
Lateral force magnitude within one rotating cycle.
Figure 8.
Rotor channel position diagram corresponding to two pairs of peak and valley values of lateral force (the pink parts are rotor channels).
Figure 8.
Rotor channel position diagram corresponding to two pairs of peak and valley values of lateral force (the pink parts are rotor channels).
Figure 9.
Power spectral density curve of lateral force.
Figure 9.
Power spectral density curve of lateral force.
Figure 10.
Lateral forces in each direction and corresponding points’ pressure transient change curve. (a) Transient curve of lateral force in X direction and pressure of points at two sides of Y-axis; (b) transient curve of lateral force in X direction and pressure of points at two sides of Y-axis.
Figure 10.
Lateral forces in each direction and corresponding points’ pressure transient change curve. (a) Transient curve of lateral force in X direction and pressure of points at two sides of Y-axis; (b) transient curve of lateral force in X direction and pressure of points at two sides of Y-axis.
Figure 11.
Circular direction pressure distribution curve at circumference N-1, N-2, N-3 (red lines are fitting curves). (a) N-1; (b) N-2; (c) N-3.
Figure 11.
Circular direction pressure distribution curve at circumference N-1, N-2, N-3 (red lines are fitting curves). (a) N-1; (b) N-2; (c) N-3.
Figure 12.
PSDM of pressure fluctuation and pressure standard deviation at each sampling point.
Figure 12.
PSDM of pressure fluctuation and pressure standard deviation at each sampling point.
Figure 13.
PSDM at each sampling point.
Figure 13.
PSDM at each sampling point.
Figure 14.
Diagram of rotor eccentricity.
Figure 14.
Diagram of rotor eccentricity.
Figure 15.
Diagram of the clearance pressure at the eccentric stable position.
Figure 15.
Diagram of the clearance pressure at the eccentric stable position.
Figure 16.
Pressure distribution curve in circular direction at eccentric stable position.
Figure 16.
Pressure distribution curve in circular direction at eccentric stable position.
Figure 17.
Diagram of the range of pressure fluctuation with 32 times and 8 times rotation frequency.
Figure 17.
Diagram of the range of pressure fluctuation with 32 times and 8 times rotation frequency.
Figure 18.
PSDM of each sampling point in the eccentric state.
Figure 18.
PSDM of each sampling point in the eccentric state.
Figure 19.
Pressure distribution curves of circumference N-1 under different flow rates and PHO. (a) Under different flow rates; (b) under different PHO.
Figure 19.
Pressure distribution curves of circumference N-1 under different flow rates and PHO. (a) Under different flow rates; (b) under different PHO.
Figure 20.
Change in lateral force under different working conditions (Red lines are fitting curves). (a) Under different flow rates; (b) under different PHO.
Figure 20.
Change in lateral force under different working conditions (Red lines are fitting curves). (a) Under different flow rates; (b) under different PHO.
Figure 21.
Pressure distribution curves of the circumferences at the rotary speed of eccentric stabilization with different flow rates. (a) N-1; (b) N-2; (c) N-3.
Figure 21.
Pressure distribution curves of the circumferences at the rotary speed of eccentric stabilization with different flow rates. (a) N-1; (b) N-2; (c) N-3.
Figure 22.
Circular pressure distribution curves at the rotary speed of eccentric stabilization with different PHO. (a) N-1; (b) N-2; (c) N-3.
Figure 22.
Circular pressure distribution curves at the rotary speed of eccentric stabilization with different PHO. (a) N-1; (b) N-2; (c) N-3.
Figure 23.
PSDM of the lateral force and excitation force under different working conditions. (a) Different flow rate; (b) different PHO.
Figure 23.
PSDM of the lateral force and excitation force under different working conditions. (a) Different flow rate; (b) different PHO.
Figure 24.
Fitted surface among the eccentric distance, flow rate and PHO.
Figure 24.
Fitted surface among the eccentric distance, flow rate and PHO.
Figure 25.
Fitted surface among the resistance torque, rotary speed and eccentric distance.
Figure 25.
Fitted surface among the resistance torque, rotary speed and eccentric distance.
Figure 26.
Fitted surface of the rotary speed, flow rate and PHO on eccentric stabilization.
Figure 26.
Fitted surface of the rotary speed, flow rate and PHO on eccentric stabilization.
Figure 27.
Structure of four-districts RERD.
Figure 27.
Structure of four-districts RERD.
Figure 28.
Circumference pressure distribution fitting curves of four-districts RERD.
Figure 28.
Circumference pressure distribution fitting curves of four-districts RERD.
Figure 29.
Photos of test site and RERD components. (a) Experimental site; (b) parts of RERD.
Figure 29.
Photos of test site and RERD components. (a) Experimental site; (b) parts of RERD.
Figure 30.
Sensors for rotary speed, pressure and vibration acceleration. (a) Rotary speed sensor; (b) pressure and vibration sensor.
Figure 30.
Sensors for rotary speed, pressure and vibration acceleration. (a) Rotary speed sensor; (b) pressure and vibration sensor.
Figure 31.
Time domain diagram of pressure fluctuation at point 34-1 in a rotation cycle (①–⑧ are 8 small cycle of fluctuation).
Figure 31.
Time domain diagram of pressure fluctuation at point 34-1 in a rotation cycle (①–⑧ are 8 small cycle of fluctuation).
Figure 32.
PSD diagram of pressure fluctuation in frequency domain at point 34-1 in a rotation cycle.
Figure 32.
PSD diagram of pressure fluctuation in frequency domain at point 34-1 in a rotation cycle.
Figure 33.
Comparison between simulation and experimental data of pressure mean value at point 34-1. (a) Different PHO; (b) different flow rate.
Figure 33.
Comparison between simulation and experimental data of pressure mean value at point 34-1. (a) Different PHO; (b) different flow rate.
Figure 34.
Relation between the mean pressure at point 34-1 and PHO and flow rate in the experiment. (a) Different PHO; (b) different flow rate.
Figure 34.
Relation between the mean pressure at point 34-1 and PHO and flow rate in the experiment. (a) Different PHO; (b) different flow rate.
Figure 35.
Relation between the vibration RMS of the cylinder wall at point 34-1 and PHO and flow rate in the experiment. (a) Different PHO; (b) different flow rate.
Figure 35.
Relation between the vibration RMS of the cylinder wall at point 34-1 and PHO and flow rate in the experiment. (a) Different PHO; (b) different flow rate.
Figure 36.
Rotary speed of rotor: comparison between the old model, new model and experimental data. (a) Different PHO; (b) different flow rate.
Figure 36.
Rotary speed of rotor: comparison between the old model, new model and experimental data. (a) Different PHO; (b) different flow rate.
Figure 37.
Relation between the rotary speed of rotor and flow rate and PHO in the experiment. (a) Different PHO; (b) different flow rate.
Figure 37.
Relation between the rotary speed of rotor and flow rate and PHO in the experiment. (a) Different PHO; (b) different flow rate.
Table 1.
Directions and characteristics of past research on RERD.
Table 1.
Directions and characteristics of past research on RERD.
| Research Direction | Highlights | What Can Be Improved |
|---|
| Static pressure support | The lubrication, support and leakage mechanism of channel liquid film were revealed. | The pressure distribution and lateral force was not researched. |
| Driving and resistance torque | The hydraulic self-driving performance of RERD and rotary speed model were found. | The eccentricity of the rotor was ignored. |
| Mixing behavior | The mixing model was established and the mixing problem was improved a lot. | Lack of comprehensive prediction formula of mixing rate. |
| Innovative structural design | The new structures exhibited higher energy recovery efficiency or lower energy cost. | Few improvements were made to the stability of existing devices. |
Table 2.
Mesh number independence check.
Table 2.
Mesh number independence check.
| Mesh Number (×106) | Resultant Lateral Force (kN) | Resistance Torque (N·m) |
|---|
| 2.60 | 138.38 | −3.680 |
| 3.07 | 137.70 | −3.681 |
| 4.07 | 138.67 | −3.676 |
Table 3.
Change in the standard deviation of the mean values of pressure on each point on the circumference.
Table 3.
Change in the standard deviation of the mean values of pressure on each point on the circumference.
| Circumference | Non-Eccentric | Eccentric |
|---|
| N-1 | 1.47 MPa | 1.49 MPa |
| N-2 | 1.69 MPa | 1.02 MPa |
Table 4.
Rotary speed and eccentric distance of the rotor under eccentric stabilization with different flow rates.
Table 4.
Rotary speed and eccentric distance of the rotor under eccentric stabilization with different flow rates.
| PHO (MPa) | Flow Rate (m3/h) | Rotary Speed (rpm) | Eccentric Distance (μm) |
|---|
| 6 | 90 | 920 | 11 |
| 6 | 80 | 760 | 12.5 |
| 6 | 70 | 650 | 13.5 |
| 6 | 60 | 520 | 14.5 |
| 6 | 50 | 380 | 16.5 |
Table 5.
Rotary speed and eccentric distance of the rotor on eccentric stabilization under different PHO.
Table 5.
Rotary speed and eccentric distance of the rotor on eccentric stabilization under different PHO.
| Flow Rate (m3/h) | PHO (MPa) | Rotary Speed (rpm) | Eccentric Distance (μm) |
|---|
| 70 | 6 | 650 | 13.5 |
| 70 | 5.5 | 675 | 12.5 |
| 70 | 5 | 680 | 12 |
| 70 | 4.5 | 685 | 11.3 |
| 70 | 4 | 688 | 10.5 |
| 70 | 3.5 | 692 | 9.5 |
| 70 | 3 | 694 | 8.5 |
| 70 | 2.5 | 696 | 7 |
| 70 | 2 | 698 | 5.5 |
| 70 | 1.5 | 699 | 4.5 |
| 70 | 1 | 700 | 3 |
Table 6.
Comparison between four-districts and the old two-districts RERDs.
Table 6.
Comparison between four-districts and the old two-districts RERDs.
| Type of RERD | Lateral Force at Initial Position | Excitation Force at Stable Position |
|---|
| Old (two-districts) | 139 KN | 3.05 KN |
| Four-districts | <2 kN | 1.70 KN |

 ,
, 






































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}