Optimization of the Multi-Start Strategy of a Direct-Search Algorithm for the Calibration of Rainfall–Runoff Models for Water-Resource Assessment

 , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Case Study and Data
2.2. Conceptual Rainfall–Runoff Models
2.2.1. French Rural-Engineering-with-Four-Daily-Parameters (GR4J) Model
2.2.2. Swedish Hydrological Office Water-Balance Department (HBV) Model (with the Snow Component)
2.2.3. Sacramento Soil Moisture Accounting (SAC-SMA) Model
2.3. Optimization Methods
2.3.1. Latin Hypercube (LH) and Rosenbrock (RNB) Combined Algorithm
LH Sampling Method
RNB
Combination Methods
- Define the dimension of the LH (LHDIV), number of parameters or variables, Xi, the minimum value (Xi min) and the maximum value (Xi max) of the interval defined in each parameter.
- Divide the sample space F(x), for each Xi, into n intervals with the same probability of occurrence to plot a grid (Figure 2a). The increase between intervals is calculated in Equation (1).where n coincides with LHDIV.
- For each parameter, Xi, a vector is generated comprising the points, xj, at each intersection of the dividing lines of the grid generated by the intervals with axes, where j = 1, ..., (n + 1). Each xj is associated with a random number, xk [0,1] to form a vector with the same dimension. The vector, step 11, is organized in descending order as a function of xk for each Xi.
- The ordered vectors, Xi-ord, allow determining the random sampling of points in the sample space, F(x), combining the positions of xj and xk to select a point, xjk. Thus, there is only one point in each row and column in F(x) (Figure 2a).
- The maximum number of combinations for an LH of n intervals and Xi parameters is calculated in Equation (2).
- At each point, xjk, determined in F(x), the OF value is calculated, and the points are ranked in descending order according to the OF value obtained.
- The best points found (xjk-n) in the previous step are the input to the RNB’s algorithm. The number of input points for the algorithm is defined by the RLAUNCH parameter, which defines how many times RNB will be launched to find the optimal solution of the problem.
- The RNB algorithm must define a starting point (Xini) with coordinates (xj(0), xk(0)), a step for each direction (hj (0), hk (0)) and the number of RNB launches (RLAUNCH).
- It starts from the first set of iterations in the axial search directions, coinciding with the coordinate axes of the Xini point:
- The criterion for changing search directions is usually taken when there have been successes (at least one) followed by failures in all directions tested, not necessarily consecutively. In the change, a new axis is selected, coinciding with the direction in which the greatest success occurs. It is complemented with an orthonormal set for the other axis (Figure 2b).
- If it starts from xini, and, after a number of iterations, it is determined that a change of direction must be realized with x in the last successful point, the greatest successful direction will be determined with the vector showed in Equation (4).The remainder of the auxiliary vectors is calculated from Equations (5)–(7).
- The new calculated directions have the disadvantage of not being orthonormal. Therefore, this characteristic is achieved using the Gram–Schmidt orthogonalization method, which entails obtaining a new set of orthonormal vectors. Thus, the first vector, , is simply normalized (Equation (8)). For the rest of the vectors, the corresponding part rendering them non-orthonormal to each other (i.e., the projection of one vector on another) is annulled. Then, they are normalised. The steps 8 to 12 are repeated.
- The algorithm stops when one of the convergence criteria established in ERR or MAXN is satisfied. These criteria are explained in more detailed below.
Parameter Description of the Latin Hypercube and Rosenbrock (LHR) Algorithm
2.3.2. University of Arizona’s Shuffled Complex Evolution (SCE-UA) Algorithm
2.4. Objective Functions (OF)
2.5. Calibration and Validation Periods
3. Discussion and Analysis of Results
3.1. Comparison of the OF Evaluations Number versus Model Complexity
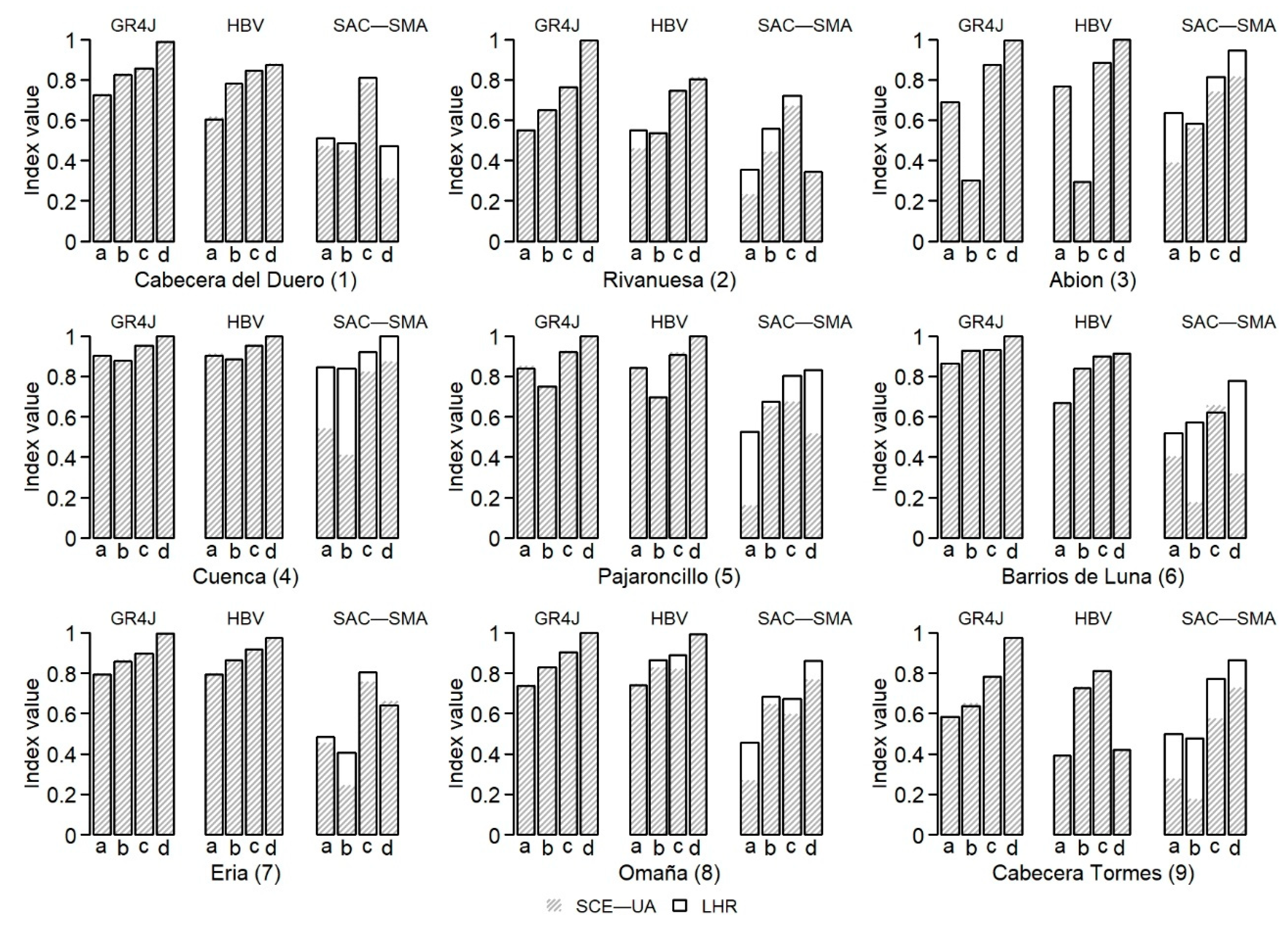
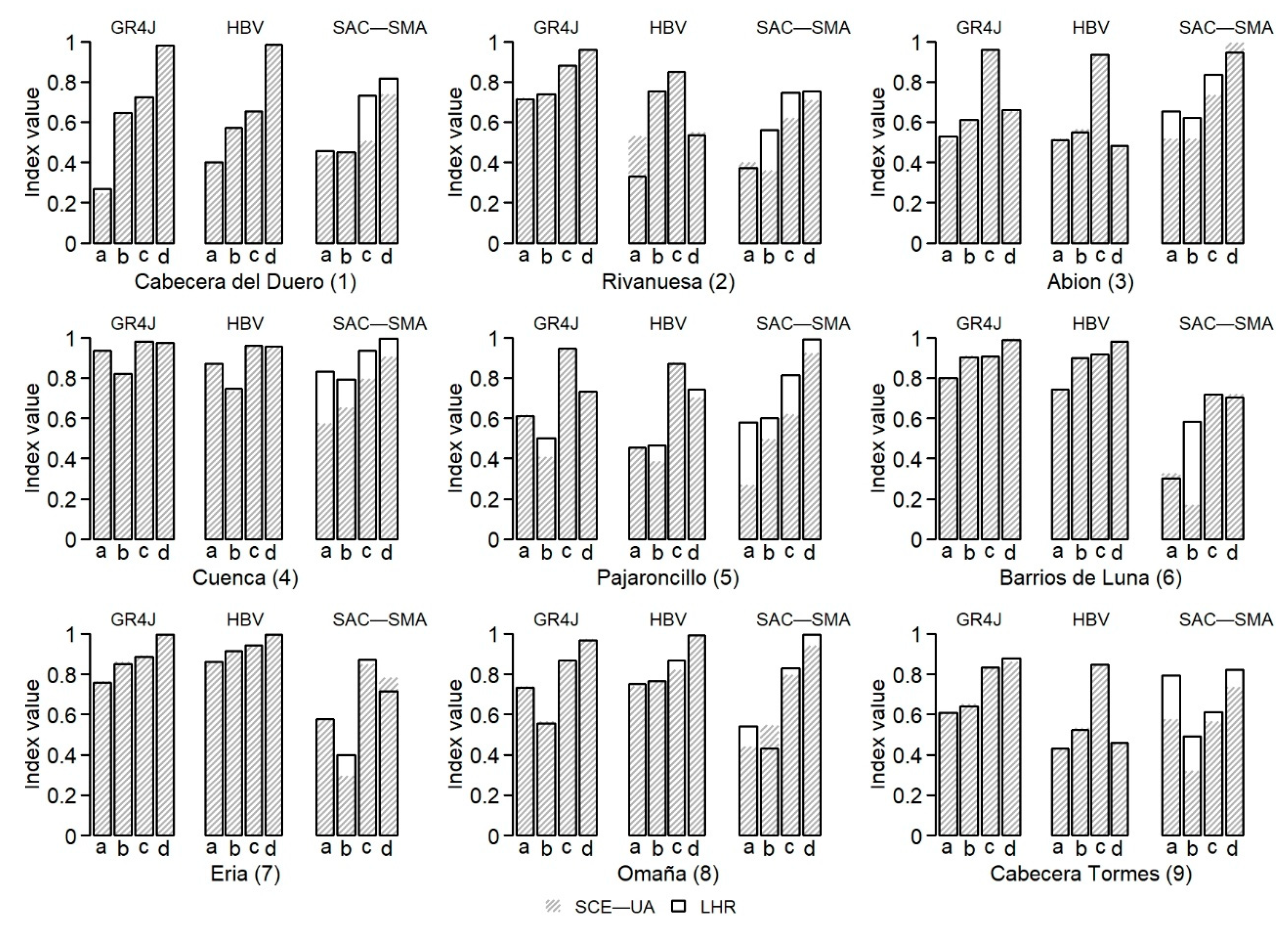
3.2. Comparison of the OF Values
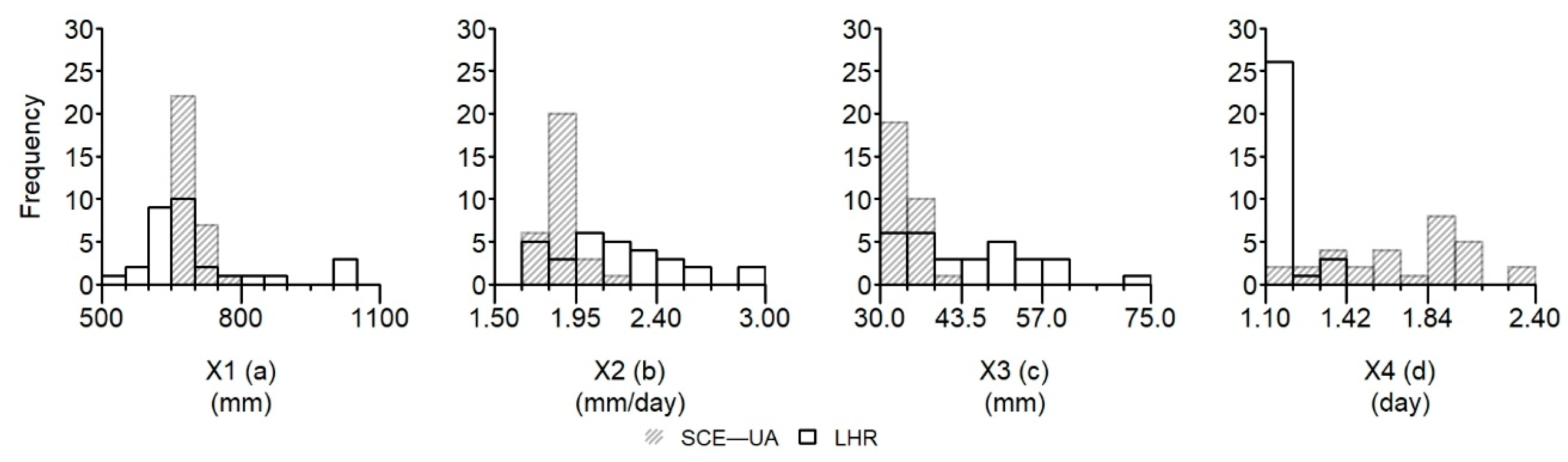
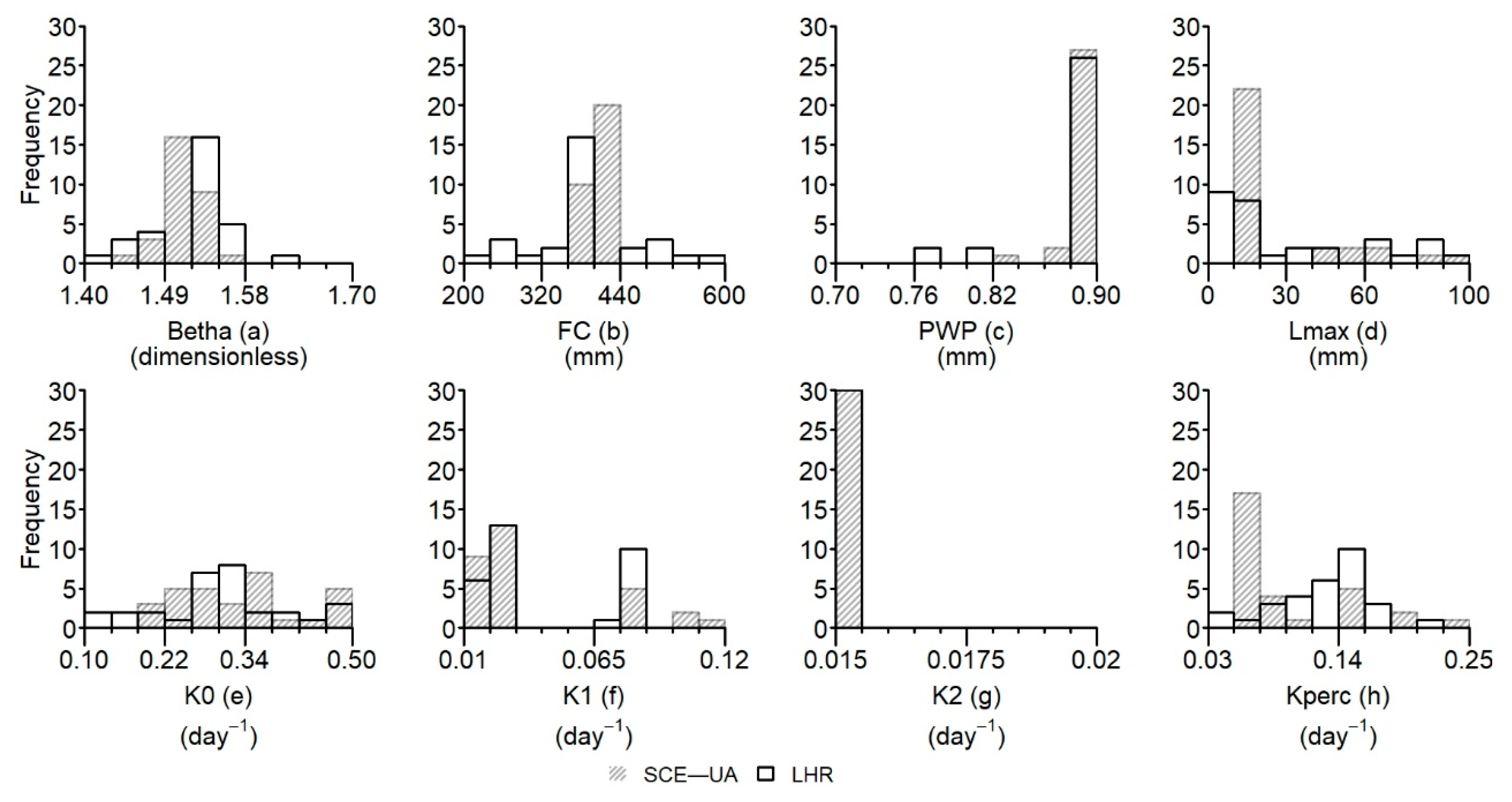
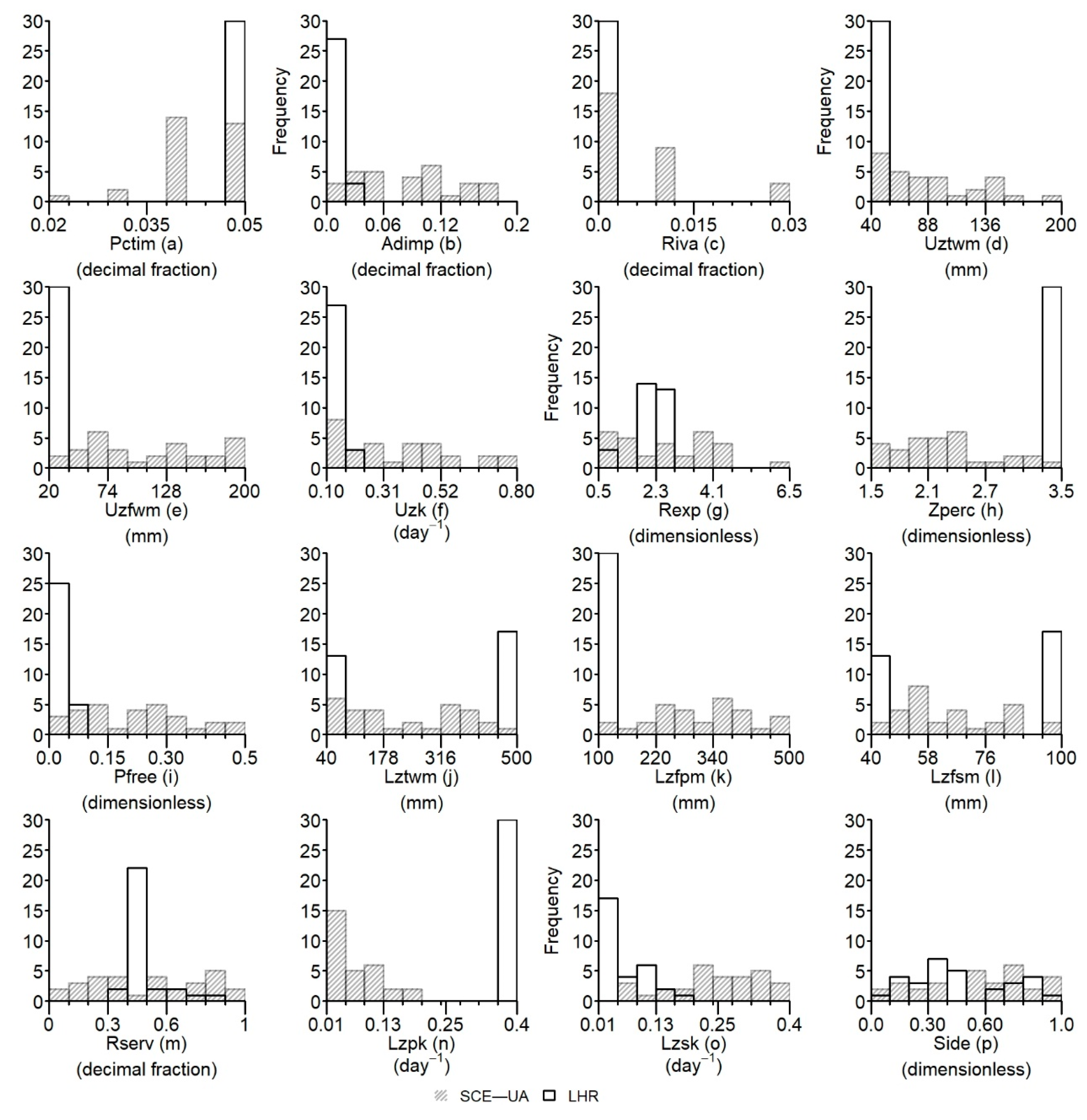
3.3. Comparison of the Effective Parameter Values
3.4. Comparison of GR4J, HBV and SAC-SMA Performance
3.5. Comparison of the Estimated Runoffs for the Calibration and Validation Periods
3.6. Sensitivity Analysis of the Parameters of the LHR Algorithm
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Parameter (Units) | Description | Min. | Max. |
|---|---|---|---|---|
| GR4J | ||||
| X1 (mm) | Maximum capacity of the production store | 100 | 1200 | |
| X2 (mm/day) | Groundwater exchange coefficient | −5 | 3 | |
| X3 (mm) | One day ahead maximum capacity of the routing store | 20 | 300 | |
| X4 (days) | Time base of unit hydrograph UH1 | 0.5 | 5.8 | |
| HBV | ||||
| Soil parameters | Betha (dimensionless) | Shape coefficient of recharge function | 1 | 6 |
| FC (mm) | Maximum water storage in the unsaturated zone store | 30 | 650 | |
| PWP (mm) | Soil moisture value above which actual evaporation reaches potential evaporation | 30 | 650 | |
| Groundwater near the surface parameters | Lmax (mm) | Threshold parameter for extra outflow from upper zone | 0 | 100 |
| K0 (day−1) | Additional recession coefficient of upper groundwater store | 0.001 | 1 | |
| K1 (day−1) | Recession coefficient of upper groundwater store | 0.001 | 1 | |
| Deep groundwater parameters | K2 (day−1) | Recession coefficient of lower groundwater store | 0.001 | 1 |
| Kperc (mm d−1) | Maximum percolation to lower zone | 0.001 | 1 | |
| Snow parameters | TT (°C) | Threshold temperature | −1.5 | 2.5 |
| DD (mm °C−1 day−1) | Degree-day factor | 0 | 30 | |
| SAC-SMA | ||||
| Surface parameters | PCTIM (decimal fraction) | Impervious fraction of the watershed area | 0 | 0.1 |
| ADIMP (decimal fraction) | Additional impervious area (decimal fraction) | 0 | 0.5 | |
| RIVA (decimal fraction) | Riparian vegetation area | 0 | 0.2 | |
| Soil parameters | UZTWM (mm) | Upper zone tension water maximum storage | 10 | 500 |
| UZFWM (mm) | Upper zone free water maximum storage | 10 | 500 | |
| UZK (day−1) | Upper zone free water lateral depletion rate | 0.1 | 0.9 | |
| REXP (dimensionless) | Exponent of the percolation equation | 1 | 5 | |
| ZPERC (dimensionless) | Maximum percolation rate | 1 | 250 | |
| Groundwater parameters | PFREE (decimal fraction) | Fraction of water percolating from upper zone directly to lower zone free water storage | 0 | 0.9 |
| LZTWM (mm) | Lower zone tension water maximum storage | 5 | 700 | |
| LZFPM (mm) | Lower zone free water primary maximum storage | 5 | 500 | |
| LZFSM (mm) | Lower zone free water supplemental maximum storage | 5 | 500 | |
| RSERV (decimal fraction) | Fraction of lower zone free water not transferrable to lower zone tension water | 1 | 0.9 | |
| LZPK (day−1) | Lower zone primary free water depletion rate | 0.0001 | 0.6 | |
| Case-Study Catchments | Threshold Temperature TT (°C) | Degree-Day Factor DD (mm °C−1 Day−1) |
|---|---|---|
| 6 | 0 | 10.05 |
| 7 | 0 | 11.72 |
| 8 | 0 | 4.49 |
| 9 | 0 | 15.22 |
References
- Bellin, A.; Majone, B.; Cainelli, O.; Alberici, D.; Villa, F. A continuous coupled hydrological and water resources management model. Environ. Model. Softw. 2016, 75, 176–192. [Google Scholar] [CrossRef]
- Arsenault, R.; Poulin, A.; Côté, P.; Brissette, F. Comparison of Stochastic Optimization Algorithms in Hydrological Model Calibration. J. Hydrol. Eng. 2014, 19, 1374–1384. [Google Scholar] [CrossRef]
- Abdulla, F.; Al-Badranih, L. Application of a rainfall-runoff model to three catchments in Iraq. Hydrol. Sci. J. 2000, 45, 13–25. [Google Scholar] [CrossRef]
- Devi, G.K.; Ganasri, B.P.; Dwarakish, G.S. A Review on Hydrological Models. Aquat. Procedia 2015, 4, 1001–1007. [Google Scholar] [CrossRef]
- Coron, L.; Thirel, G.; Delaigue, O.; Perrin, C.; Andréassian, V. The suite of lumped GR hydrological models in an R package. Environ. Model. Softw. 2017, 94, 166–171. [Google Scholar] [CrossRef]
- Chlumecký, M.; Buchtele, J.; Richta, K. Application of random number generators in genetic algorithms to improve rainfall-runoff modelling. J. Hydrol. 2017, 553, 350–355. [Google Scholar] [CrossRef]
- Laloy, E.; Vrugt, J.A. High-dimensional posterior exploration of hydrologic models using multiple-try DREAM (ZS) and high-performance computing. Water Resour. Res. 2012, 48, 1–18. [Google Scholar] [CrossRef]
- Chu, W.; Gao, X.; Sorooshian, S. Improving the shuffled complex evolution scheme for optimization of complex nonlinear hydrological systems: Application to the calibration of the Sacramento soil-moisture accounting model. Water Resour. Res. 2010, 46, 1–12. [Google Scholar] [CrossRef]
- Duan, Q.; Sorooshian, S.; Gupta, V.K. Effective and Efficient Global Optimization for Conceptual Rainfall-Runoff Models. Water Resour. Res. 1992, 28, 1015–1031. [Google Scholar] [CrossRef]
- Jiang, Y.; Li, X.; Huang, C. Automatic calibration a hydrological model using a master-slave swarms shuffling evolution algorithm based on self-adaptive particle swarm optimization. Expert Syst. Appl. 2013, 40, 752–757. [Google Scholar] [CrossRef]
- Kim, S.M.; Benham, B.L.; Brannan, K.M.; Zeckoski, R.W.; Doherty, J. Comparison of hydrologic calibration of HSPF using automatic and manual methods. Water Resour. Res. 2007, 43, 1–12. [Google Scholar] [CrossRef]
- Willems, P.; Mora, D.; Vansteenkiste, T.; Taye, M.T.; Van Steenbergen, N. Parsimonious rainfall-runoff model construction supported by time series processing and validation of hydrological extremes—Part 2: Intercomparison of models and calibration approaches. J. Hydrol. 2014, 510, 591–609. [Google Scholar] [CrossRef]
- Vansteenkiste, T.; Tavakoli, M.; Van Steenbergen, N.; De Smedt, F.; Batelaan, O.; Pereira, F.; Willems, P. Intercomparison of five lumped and distributed models for catchment runoff and extreme flow simulation. J. Hydrol. 2014, 511, 335–349. [Google Scholar] [CrossRef]
- Tolson, B.A.; Shoemaker, C.A. Dynamically dimensioned search algorithm for computationally efficient watershed model calibration. Water Resour. Res. 2007, 43, 1–16. [Google Scholar] [CrossRef]
- Moradkhani, H.; Sorooshian, S. General review of rainfall-runoff modeling: Model calibration, data assimilation, and uncertainty analysis. In Hydrological Modelling and the Water Cycle. Water Science and Technology Library; Sorooshian, S., Hsu, K., Coppola, E., Tomassetti, B., Verdecchia, M., Visconti, G., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; Volume 63, ISBN 978-3-540-77843-1. [Google Scholar]
- Piotrowski, A.P.; Napiorkowski, M.J.; Napiorkowski, J.J.; Osuch, M.; Kundzewicz, Z.W. Are modern metaheuristics successful in calibrating simple conceptual rainfall-runoff models? Hydrol. Sci. J. 2017, 62, 606–625. [Google Scholar] [CrossRef]
- Piotrowski, A.P.; Napiorkowski, M.J.; Napiorkowski, J.J.; Rowinski, P.M. Swarm Intelligence and Evolutionary Algorithms: Performance versus speed. Inf. Sci. 2017, 384, 34–85. [Google Scholar] [CrossRef]
- Goswami, M.; O’Connor, K.M. Comparative assessment of six automatic optimization techniques for calibration of a conceptual rainfall-runoff model. Hydrol. Sci. J. 2007, 52, 432–449. [Google Scholar] [CrossRef]
- Piotrowski, A.P.; Napiorkowski, J.J.; Osuch, M. Relationship Between Calibration Time and Final Performance of Conceptual Rainfall-Runoff Models. Water Resour. Manag. 2018, 1–19. [Google Scholar] [CrossRef]
- Sörensen, K. Metaheuristics-the metaphor exposed. Int. Trans. Oper. Res. 2015, 22, 3–18. [Google Scholar] [CrossRef]
- Maier, H.R.; Kapelan, Z.; Kasprzyk, J.; Kollat, J.B.; Matott, L.S.; Cunha, M.C.; Dandy, G.C.; Gibbs, M.S.; Keedwell, E.; Marchi, A.; et al. Evolutionary algorithms and other metaheuristics in water resources: Current status, research challenges and future directions. Environ. Model. Softw. 2014, 62, 271–299. [Google Scholar] [CrossRef] [Green Version]
- Piotrowski, A.P. Regarding the rankings of optimization heuristics based on artificially-constructed benchmark functions. Inf. Sci. 2015, 297, 191–201. [Google Scholar] [CrossRef]
- Reed, P.M.; Hadka, D.; Herman, J.D.; Kasprzyk, J.R.; Kollat, J.B. Evolutionary multiobjective optimization in water resources: The past, present, and future. Adv. Water Resour. 2013, 51, 438–456. [Google Scholar] [CrossRef]
- Thyer, M.; Kuczera, G.; Bates, B.C. Probabilistic optimization for conceptual rainfall-runoff models: A comparison of the shuffled complex evolution and simulated annealing algorithms. Water Resour. Res. 1999, 35, 767–773. [Google Scholar] [CrossRef] [Green Version]
- Azamathulla, H.M.; Wu, F.-C.; Ghani, A.A.; Narulkar, S.M.; Zakaria, N.A.; Chang, C.K. Comparison between genetic algorithm and linear programming approach for real time operation. J. Hydro Environ. Res. 2008, 2, 172–181. [Google Scholar] [CrossRef]
- Franchini, M.; Galeati, G. Comparing several genetic algorithm schemes for the calibration of conceptual rainfall-runoff models. Hydrol. Sci. J. 1997, 42, 357–380. [Google Scholar] [CrossRef]
- Hendrickson, J.D.; Sorooshian, S.; Brazil, L.E. Comparison of Newton-Type and Direct Search Algorithms for Calibration Rainfall-Runoff Models. Water Resour. Res. 1988, 24, 691–700. [Google Scholar] [CrossRef]
- Huang, X.; Liao, W.; Lei, X.; Jia, Y.; Wang, Y.; Wang, X.; Jiang, Y.; Wang, H. Parameter optimization of distributed hydrological model with a modified dynamically dimensioned search algorithm. Environ. Model. Softw. 2014, 52, 98–110. [Google Scholar] [CrossRef]
- Kollat, J.B.; Reed, P.M. Comparing state-of-the-art evolutionary multi-objective algorithms for long-term groundwater monitoring design. Adv. Water Resour. 2006, 29, 792–807. [Google Scholar] [CrossRef]
- Lerma, N.; Paredes-Arquiola, J.; Andreu, J.; Solera, A.; Sechi, G.M. Assessment of evolutionary algorithms for optimal operating rules design in real Water Resource Systems. Environ. Model. Softw. 2015, 69, 425–436. [Google Scholar] [CrossRef]
- Rosenbrock, H.H. An Automatic Method for finding the Greatest or Least Value of a Function. Comput. J. 1960, 3, 175–184. [Google Scholar] [CrossRef]
- Ibbitt, R.P.; O’Donnell, T. Fitting Methods for Conceptual Catchments Models. J. Hydraul. Div. 1971, 97, 1341–1342. [Google Scholar]
- Kachroo, R.K.; Sea, C.H.; Warsi, M.S.; Jemenez, H.; Saxena, R.P. River flow forecasting. Part 3. Applications of linear techniques in modelling rainfall-runoff transformations. J. Hydrol. 1992, 133, 41–97. [Google Scholar] [CrossRef]
- Liang, G.; Kachroo, R.; Kang, W.; Yu, X. River flow forecasting. Part 4. Applications of linear modelling techniques for flow routing on large catchments. J. Hydrol. 1992, 133, 98–140. [Google Scholar] [CrossRef]
- Price, W.L. A controlled random search procedure for global optimisation. Comput. J. 1977, 20, 367–370. [Google Scholar] [CrossRef] [Green Version]
- Masri, S.G.; Bekey, G.A.; Safford, F.B. A global optimization algorithm using adaptive random search. Appl. Math. Comput. 1980, 7, 353–375. [Google Scholar] [CrossRef]
- Pronzato, L.; Walter, E.; Venot, A.; Lebruchec, J.-F. A general-purpose global optimizer: Implimentation and applications. Math. Comput. Simul. 1984, 26, 412–422. [Google Scholar] [CrossRef]
- Spendley, W.; Hext, G.R.; Himsworth, F.R. Sequential Application of Simplex Designs in Optimisation and Evolutionary Operation. Technometrics 1962, 4, 441–461. [Google Scholar] [CrossRef]
- Nelder, J.A.; Mead, R. A Simplex Method for Function Minimization. Comput. J. 1965, 7, 308–313. [Google Scholar] [CrossRef]
- Hooke, R.; Jeeves, T.A. “Direct Search” Solution of Numerical and Statistical Problems. J. ACM 1961, 8, 212–229. [Google Scholar] [CrossRef]
- Muttil, N.; Jayawardena, A.W. Shuffled Complex Evolution model calibrating algorithm: Enhancing its robustness and efficiency. Hydrol. Process. 2008, 22, 4628–4638. [Google Scholar] [CrossRef]
- Franchini, M.; Galeati, G.; Berra, S. Global optimization techniques for the calibration of conceptual rainfall-runoff models. Hydrol. Sci. J. 1998, 43, 443–458. [Google Scholar] [CrossRef]
- Poikolainen, I.; Neri, F.; Caraffini, F. Cluster-Based Population Initialization for differential evolution frameworks. Inf. Sci. 2015, 297, 216–235. [Google Scholar] [CrossRef] [Green Version]
- Kolda, T.G.; Lewis, R.M.; Torczon, V. Optimization by Direct Search: New Perspectives on Some Classical and Modern Methods. Soc. Ind. Appl. Math. 2003, 45, 385–482. [Google Scholar] [CrossRef]
- Chau, K. Use of meta-heuristic techniques in rainfall-runoff modelling. Water (Switz.) 2017, 9, 186. [Google Scholar] [CrossRef]
- Crepinsek, M.; Liu, S.-H.; Mernik, M. Exploration and Exploitation in Evolutionary Algorithms: A Survey. ACM Comput. Surv. Artic. 2013, 45, 1–33. [Google Scholar] [CrossRef]
- Weyland, D. A Rigorous Analysis of the Harmony Search Algorithm: How the Research Community can be Misled by a “Novel” Methodology. Int. J. Appl. Metaheuristic Comput. 2010, 1, 50–60. [Google Scholar] [CrossRef]
- Cooper, V.A.; Nguyen, V.T.V.; Nicell, J.A. Calibration of conceptual rainfall-runoff models using global optimisation methods with hydrologic process-based parameter constraints. J. Hydrol. 2007, 334, 455–466. [Google Scholar] [CrossRef]
- Kuczera, G. Efficient subspace probabilistic parameter optimization for catchment models. Water Resour. Res. 1997, 33, 177–185. [Google Scholar] [CrossRef]
- Gan, T.Y.; Biftu, G.F. Automatic calibration of conceptual rainfall-runoff models: Optimization algorithms, catchment conditions, and model structure. Water Resour. Res. 1996, 32, 3513–3524. [Google Scholar] [CrossRef]
- Sorooshian, S.; Duan, Q.; Gupta, V.K. Calibration of Rainfall-Runoff Models: Application of Global Optimization to the Sacramento Soil Moisture Accounting Model. Water Resour. Res. 1993, 29, 1185–1194. [Google Scholar] [CrossRef]
- Abdulla, F.A.; Lettenmaier, D.P.; Liang, X. Estimation of the ARNO model baseflow parameters using daily streamflow data. J. Hydrol. 1999, 222, 37–54. [Google Scholar] [CrossRef]
- Franchini, M. Use of a genetic algorithm combined with a local search method for the automatic calibration of conceptual rainfall-runoff models. Hydrol. Sci. J. 1996, 41, 21–39. [Google Scholar] [CrossRef]
- Dakhlaoui, H.; Bargaoui, Z.; Bárdossy, A. Toward a more efficient Calibration Schema for HBV rainfall-runoff model. J. Hydrol. 2012, 444–445, 161–179. [Google Scholar] [CrossRef]
- Granata, F.; Gargano, R.; de Marinis, G. Support vector regression for rainfall-runoffmodeling in urban drainage: A comparison with the EPA’s storm water management model. Water (Switz.) 2016, 8, 69. [Google Scholar]
- Onyutha, C. Hydrological model supported by a step-wise calibration against sub-flows and validation of extreme flow events. Water (Switz.) 2019, 11, 244. [Google Scholar] [CrossRef]
- Haro-Monteagudo, D.; Solera, A.; Andreu, J. Drought early warning based on optimal risk forecasts in regulated river systems: Application to the Jucar River Basin (Spain). J. Hydrol. 2017, 544, 36–45. [Google Scholar] [CrossRef]
- Madrigal, J.; Solera, A.; Suárez-Almiñana, S.; Paredes-Arquiola, J.; Andreu, J.; Sánchez-Quispe, S.T. Skill assessment of a seasonal forecast model to predict drought events for water resource systems. J. Hydrol. 2018, 564, 574–587. [Google Scholar] [CrossRef]
- Morán-Tejeda, E.; Ceballos-Barbancho, A.; Llorente-Pinto, J.M. Hydrological response of Mediterranean headwaters to climate oscillations and land-cover changes: The mountains of Duero River basin (Central Spain). Glob. Planet. Chang. 2010, 72, 39–49. [Google Scholar] [CrossRef]
- Kahil, M.T.; Albiac, J.; Dinar, A.; Calvo, E.; Esteban, E.; Avella, L.; Garcia-Molla, M. Improving the performance of water policies: Evidence from drought in Spain. Water (Switz.) 2016, 8, 34. [Google Scholar] [CrossRef]
- Fayad, A.; Gascoin, S.; Faour, G.; López-Moreno, J.I.; Drapeau, L.; Le Page, M.; Escadafal, R. Snow hydrology in Mediterranean mountain regions: A review. J. Hydrol. 2017, 551, 374–396. [Google Scholar] [CrossRef]
- Herrera, S.; Gutiérrez, J.M.; Ancell, R.; Pons, M.R.; Frías, M.D.; Fernández, J. Development and analysis of a 50-year high-resolution daily gridded precipitation dataset over Spain (Spain02). Int. J. Climatol. 2012, 32, 74–85. [Google Scholar] [CrossRef]
- Hargreaves, G.H.; Samani, Z.A. Reference crop evapotranspiration from temperature. Appl. Eng. Agric. 1985, 1, 96–99. [Google Scholar] [CrossRef]
- MAPAMA—Ministerio de Agricultura y Pesca, Alimentación y Medio Ambiente. Sistema de Información del Anuario de Aforos. (2013–2014). Available online: http://ceh-flumen64.cedex.es/anuarioaforos/default.asp (accessed on 15 March 2019).
- Garcia, F.; Folton, N.; Oudin, L. Which objective function to calibrate rainfall–runoff models for low-flow index simulations? Hydrol. Sci. J. 2017, 62, 1149–1166. [Google Scholar] [CrossRef]
- Oudin, L.; Andréassian, V.; Mathevet, T.; Perrin, C.; Michel, C. Dynamic averaging of rainfall-runoff model simulations from complementary model parameterizations. Water Resour. Res. 2006, 42, 1–10. [Google Scholar] [CrossRef]
- Madsen, H. Automatic calibration of a conceptual rainfall–runoff model using multiple objectives. J. Hydrol. 2000, 235, 276–288. [Google Scholar] [CrossRef]
- Yapo, P.O.; Gupta, H.V.; Sorooshian, S. Automatic calibration of conceptual rainfall-runoff models: Sensitivity to calibration data. J. Hydrol. 1996, 181, 23–48. [Google Scholar] [CrossRef]
- Bergström, S.; Harlin, J.; Lindström, G. Spillway design floods in Sweden: I. New guidelines. Hydrol. Sci. J. 1992, 37, 505–519. [Google Scholar] [CrossRef] [Green Version]
- Bergström, S. The HBV Model. In Computer Models of Watershed Hydrology; Singh, V.P., Ed.; Water Resources Publications: Highlands Ranch, CO, USA, 1995; pp. 443–476. [Google Scholar]
- Burnash, R.J.C.; Ferral, R.L.; McGuire, R.A. A Generalized Streamflow Simulation System-Conceptual Modeling for Digital Computers; Technical Report; United States Department of Commerce, National Weather Service and State of California, Department of Water Resources: Sacramento, CA, USA, 1973; p. 204. [Google Scholar]
- Perrin, C.; Michel, C.; Andréassian, V. Improvement of a parsimonious model for streamflow simulation. J. Hydrol. 2003, 279, 275–289. [Google Scholar] [CrossRef]
- Paredes-Arquiola, J.; Lerma, N.; Solera, A.; Andreu, J. Herramienta EvalHid Para la Evaluación de Recursos Hídricos. Manual de Usuario v1.1; Departamento de Ingeniería del Agua y Medioambiental, Grupo de Ingeniería de Recursos Hídricos, Universitat Politència de València: Valencia, Spain, 2017. (In Spanish) [Google Scholar]
- Ficchì, A.; Perrin, C.; Andréassian, V. Impact of temporal resolution of inputs on hydrological model performance: An analysis based on 2400 flood events. J. Hydrol. 2016, 538, 454–470. [Google Scholar] [CrossRef]
- Rojas-Serna, C.; Lebecherel, L.; Perrin, C.; Andréassian, V.; Oudin, L. How should a rainfall-runoff model be parameterized in an almost ungauged catchment? A methodology tested on 609 catchments. Water Resour. Res. 2016, 52, 4765–4784. [Google Scholar] [CrossRef] [Green Version]
- SMHI. Integrated Hydrological Modelling System (IHMS); Swedish Meteorological and Hydrological Institute: Norrköping, Sweden, 2012. [Google Scholar]
- Seibert, J. Regionalisation of parameters for a conceptual rainfall-runoff model. Agric. For. Meteorol. 1999, 98–99, 279–293. [Google Scholar] [CrossRef]
- Lindström, G.; Johansson, B.; Persson, M.; Gardelin, M.; Bergström, S. Development and test of the distributed HBV-96 hydrological model. J. Hydrol. 1997, 201, 272–288. [Google Scholar] [CrossRef]
- Zhang, G.; Xie, T.; Zhang, L.; Hua, X.; Liu, F. Application of multi-step parameter estimation method based on optimization algorithm in sacramento model. Water (Switz.) 2017, 9, 495. [Google Scholar] [CrossRef]
- McKay, M.D.; Beckman, R.J.; Conover, W.J. Comparison of Three Methods for Selecting Values of Input Variables in the Analysis of Output from a Computer Code. Technometrics 1979, 21, 239–245. [Google Scholar]
- Muleta, M.K.; Nicklow, J.W. Sensitivity and uncertainty analysis coupled with automatic calibration for a distributed watershed model. J. Hydrol. 2005, 306, 127–145. [Google Scholar] [CrossRef] [Green Version]
- Iman, R.L.; Conover, W.J. Small sample sensitivity analysis techniques for computer models with an application to risk assessment. Commun. Stat. Methods 1980, 9, 1749–1842. [Google Scholar] [CrossRef]
- Andréassian, V.; Bourgin, F.; Oudin, L.; Mathevet, T.; Perrin, C.; Lerat, J.; Coron, L.; Berthet, L. Seeking genericity in the selection of parameter sets: Impact on hydrological model efficiency. Water Resour. Res. 2014, 48, 8356–8366. [Google Scholar] [CrossRef]
- Björck, Å. Numerics of Gram-Schmidt orthogonalization. Linear Algebra Appl. 1994, 197–198, 297–316. [Google Scholar]
- Jain, S.K. Calibration of conceptual models for rainfall-runoff simulation. Hydrol. Sci. J. 1993, 38, 431–441. [Google Scholar] [CrossRef]
- Duan, Q.; Sorooshian, S.; Gupta, V.K.G. Optimal use of the SCE-UA global optimization method for calibrating watershed models. J. Hydrol. 1994, 158, 265–284. [Google Scholar] [CrossRef]
- Duan, Q.Y.; Gupta, V.K.; Sorooshian, S. Shuffled Complex Evolution Approach for Effective and Efficient Global Minimization. J. Optim. Theory Appl. 1993, 76, 501–521. [Google Scholar] [CrossRef]
- Janssen, P.H.M.; Heuberger, P.S.C. Calibration of process-oriented models. Ecol. Model. 1995, 83, 55–66. [Google Scholar] [CrossRef]
- Cooper, V.A.; Nguyen, V.T.V.; Nicell, J.A. Evaluation of global optimization methods for conceptual rainfall-runoff model calibration. Water Sci. Technol. 1997, 36, 53–60. [Google Scholar] [CrossRef]
- Boyle, D.P.; Gupta, H.V.; Sorooshian, S. Toward improved calibration of hydrologic models: Combining the strengths of manual and automatic methods. Water Resour. Res. 2000, 36, 3663–3674. [Google Scholar] [CrossRef]
- Nash, J.E.; Sutcliffe, J.V. River Flow Forecasting Through Conceptual Models Part I- A Discussion of Principles. J. Hydrol. 1970, 10, 282–290. [Google Scholar] [CrossRef]
- Li, Y.; Ryu, D.; Western, A.W.; Wang, Q.J. Assimilation of stream discharge for flood forecasting: Updating a semidistributed model with an integrated data assimilation scheme. Water Resour. Res. 2015, 51, 3238–3258. [Google Scholar] [CrossRef]
- Muleta, M.K. Model Performance Sensitivity to Objective Function during Automated Calibrations. J. Hydrol. Eng. 2012, 17, 756–767. [Google Scholar] [CrossRef]
- Pushpalatha, R.; Perrin, C.; Le Moine, N.; Andréassian, V. A review of efficiency criteria suitable for evaluating low-flow simulations. J. Hydrol. 2012, 420–421, 171–182. [Google Scholar] [CrossRef]
- Młyński, D.; Petroselli, A.; Wałęga, A. Flood frequency analysis by an event-based rainfall-runoff model in selected catchments of Southern Poland. Soil Water Res. 2018, 13, 170–176. [Google Scholar]
- Moriasi, D.N.; Arnold, J.G.; Van Liew, M.W.; Binger, R.L.; Harmel, R.D.; Veith, T.L. Model evaluation guidelines for systematic quantification of accuracy in watershed simulations. Trans. ASABE 2007, 50, 885–900. [Google Scholar] [CrossRef]
- Beven, K.; Binley, A. The Future of Distributed Models: Model Calibration and Uncertainty Prediction. Hydrol. Process. 1992, 6, 279–298. [Google Scholar] [CrossRef]
- Beven, K. Prophecy, reality and uncertainty in distributed hydrological modelling. Adv. Water Resour. 1993, 16, 41–51. [Google Scholar] [CrossRef]
- Li, H.; Xu, C.-Y.; Beldring, S. How much can we gain by increasing degree of model complexity? J. Hydrol. 2015, 527, 858–871. [Google Scholar] [CrossRef]
- Perrin, C.; Michel, C.; Andréassian, V. Does a large number of parameters enhance model performance? Comparative assessment of common catchment model structures on 429 catchments. J. Hydrol. 2001, 242, 275–301. [Google Scholar] [CrossRef]
- Osuch, M.; Romanowicz, R.J.; Booij, M.J. The influence of parametric uncertainty on the relationships between HBV model parameters and climatic characteristics. Hydrol. Sci. J. 2015, 60, 1299–1316. [Google Scholar] [CrossRef] [Green Version]
- Qi, W.; Zhang, C.; Fu, G.; Zhou, H. Quantifying dynamic sensitivity of optimization algorithm parameters to improve hydrological model calibration. J. Hydrol. 2016, 533, 213–223. [Google Scholar] [CrossRef] [Green Version]











| Case-Study Catchments | Surface (km2) | Average Annual P (mm) | Average Annual PE (mm) | Average Annual Flow (hm3) | Presence of Snow | Flow System | |
|---|---|---|---|---|---|---|---|
| 1 | Cab. del Duero | 133.1 | 755.8 | 832.9 | 93.4 | No | Duero |
| 2 | Rivanuesa | 93.2 | 862.5 | 776.6 | 72.3 | No | Duero |
| 3 | Abión | 897.8 | 581.5 | 986.3 | 150.0 | No | Duero |
| 4 | Cuenca | 1005.6 | 601.9 | 1057.3 | 300.7 | No | Júcar |
| 5 | Pajaroncillo | 829.0 | 589.8 | 1031.3 | 161.3 | No | Júcar |
| 6 | Barrios de Luna | 492.1 | 946.7 | 760.8 | 447.6 | Yes | Duero |
| 7 | Eria | 283.0 | 744.7 | 858.0 | 153.0 | Yes | Duero |
| 8 | Omaña | 403.6 | 793.4 | 820.9 | 96.1 | Yes | Duero |
| 9 | Cab. del Tormes | 627.4 | 813.7 | 973.5 | 688.0 | Yes | Duero |
| Number | Parameter Name | Description | Set Value |
|---|---|---|---|
| 1 | ALPHA | Advance or progress coefficient | 3 |
| 2 | BETA | Setback coefficient | −0.5 |
| 3 | RLAUNCH | RNB launches number | 3 |
| 4 | LHDIV | LH dimension | 50 |
| 5 | STEPROS | Range subdivision parameter | 40 |
| 6 | ERR | Increment in each time step | 0.001 |
| 7 | MAXN | Maximum number of iterations | 3000 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
García-Romero, L.; Paredes-Arquiola, J.; Solera, A.; Belda, E.; Andreu, J.; Sánchez-Quispe, S.T. Optimization of the Multi-Start Strategy of a Direct-Search Algorithm for the Calibration of Rainfall–Runoff Models for Water-Resource Assessment. Water 2019, 11, 1876. https://doi.org/10.3390/w11091876
García-Romero L, Paredes-Arquiola J, Solera A, Belda E, Andreu J, Sánchez-Quispe ST. Optimization of the Multi-Start Strategy of a Direct-Search Algorithm for the Calibration of Rainfall–Runoff Models for Water-Resource Assessment. Water. 2019; 11(9):1876. https://doi.org/10.3390/w11091876
Chicago/Turabian StyleGarcía-Romero, Liliana, Javier Paredes-Arquiola, Abel Solera, Edgar Belda, Joaquín Andreu, and Sonia T. Sánchez-Quispe. 2019. "Optimization of the Multi-Start Strategy of a Direct-Search Algorithm for the Calibration of Rainfall–Runoff Models for Water-Resource Assessment" Water 11, no. 9: 1876. https://doi.org/10.3390/w11091876