Developing and Implementation of Decision Support System (DSS) for the Control of Olive Fruit Fly, Bactrocera Oleae, in Mediterranean Olive Orchards

 ,
,  ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Material and Methods
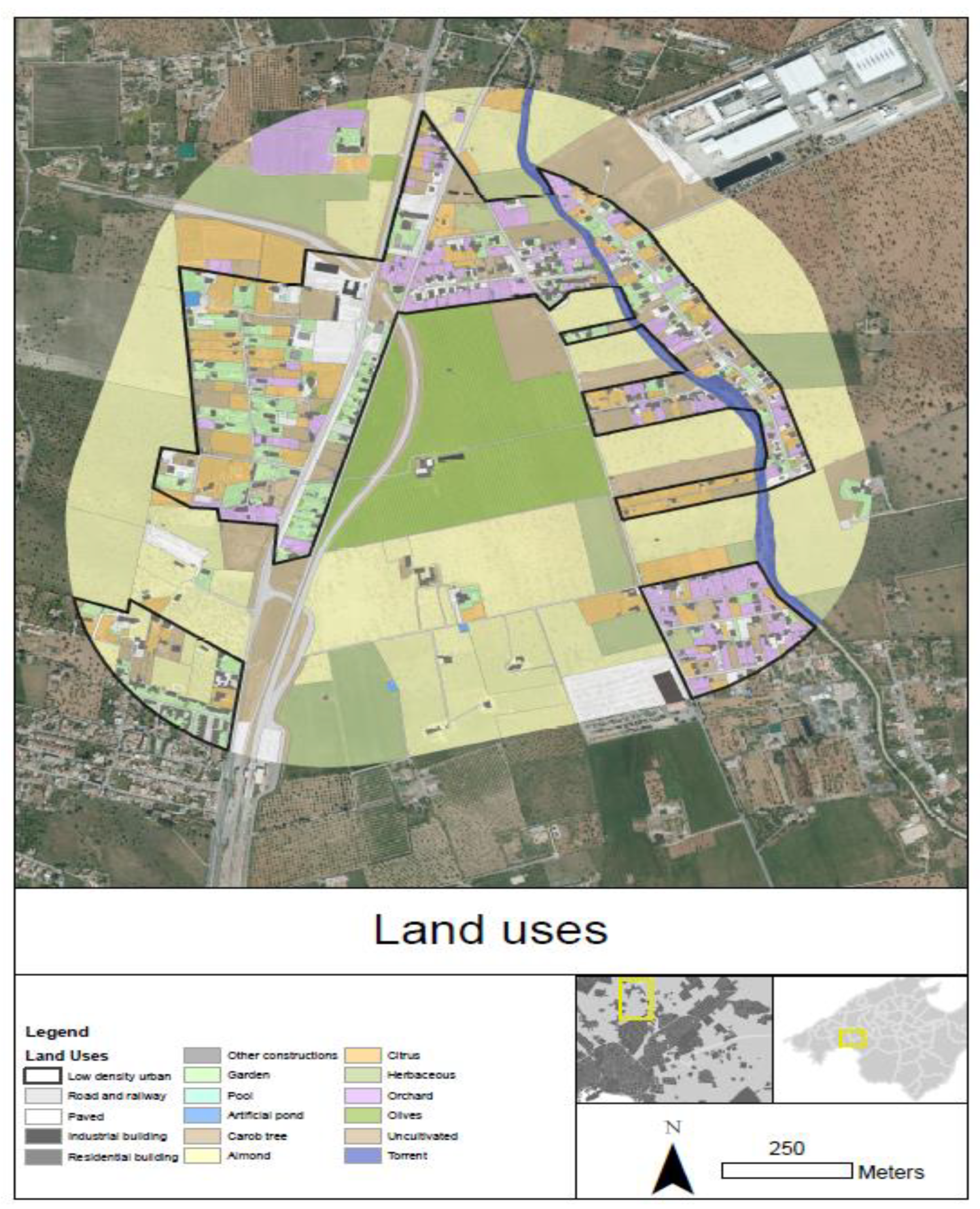
Study Site
3. Results
3.1. ReTIC vs. Conventional Monitoring System
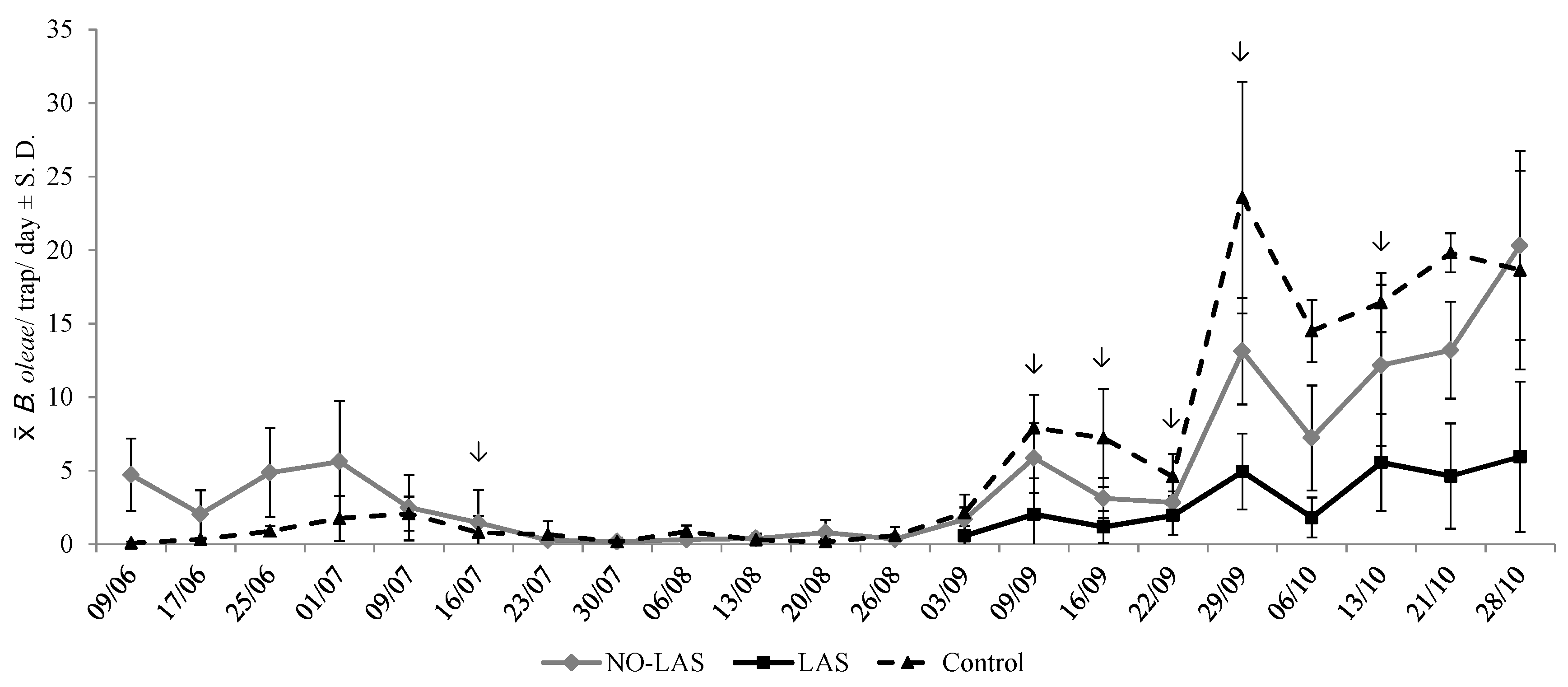
3.2. Adult Abundance in LAS, No-LAS, and Control Plots
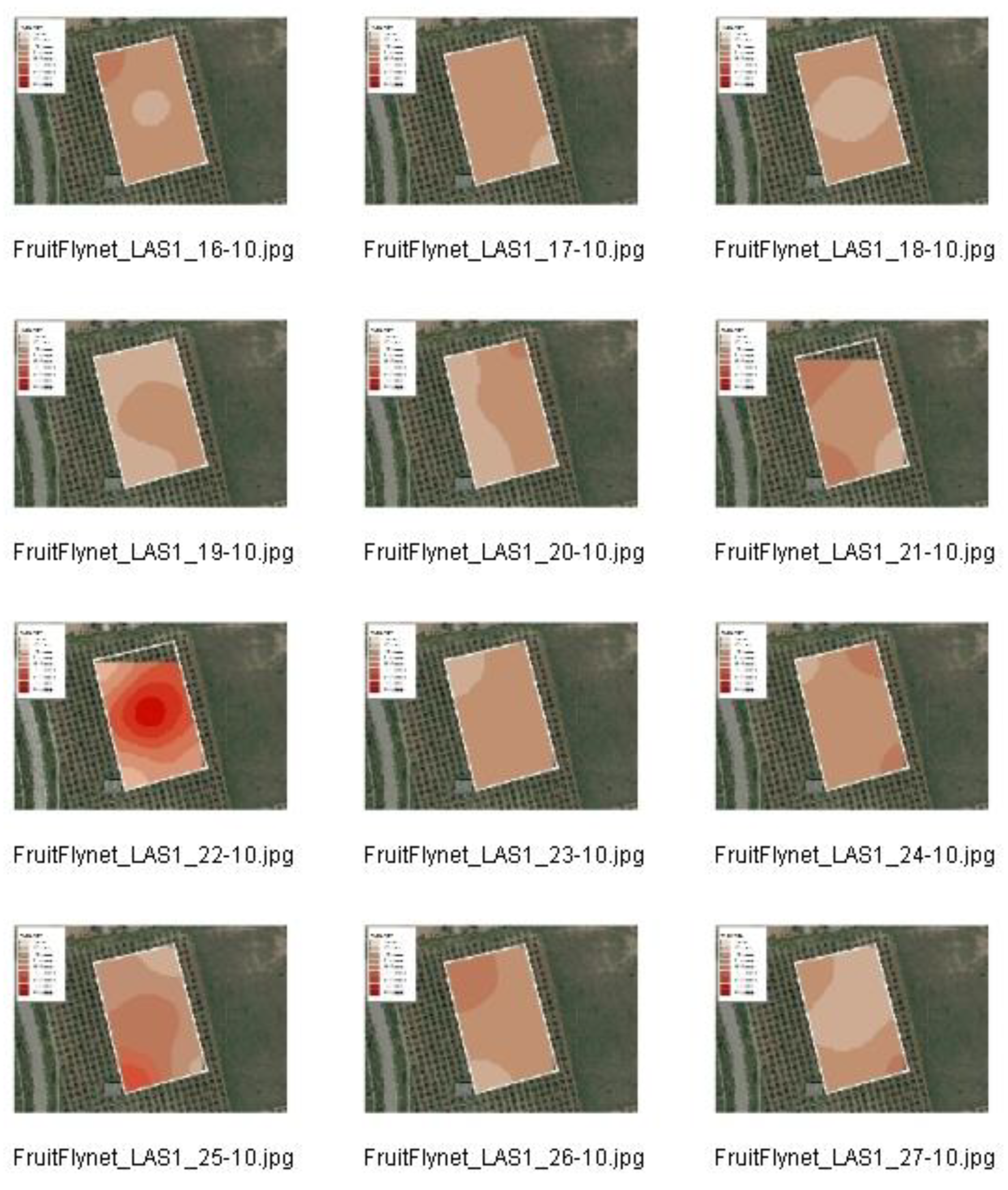
3.3. DSS Based on Spatial and Temporal Distribution of B. oleae Adults
3.4. Indicators of the Efficacy of DSS for Controlling B. oleae
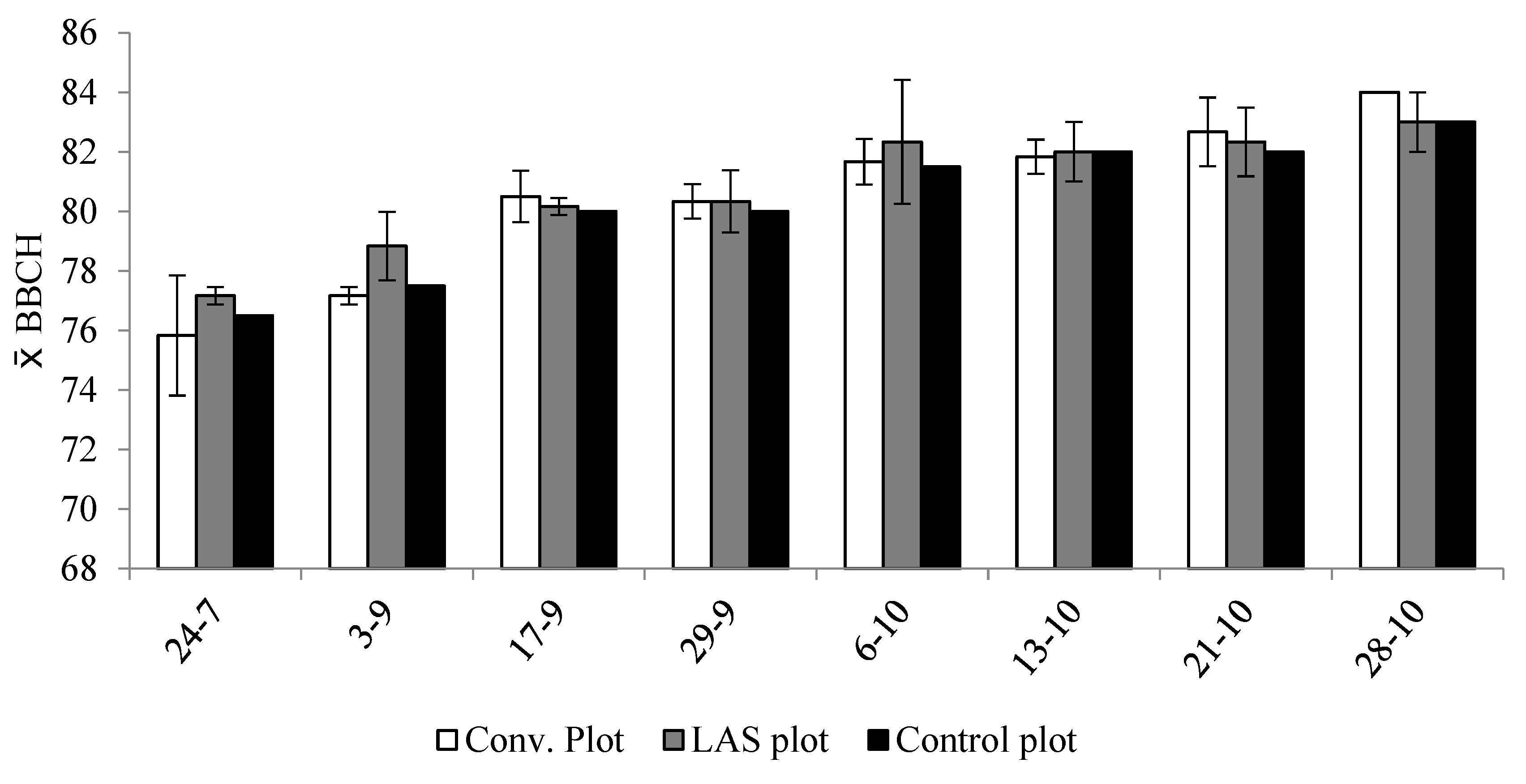
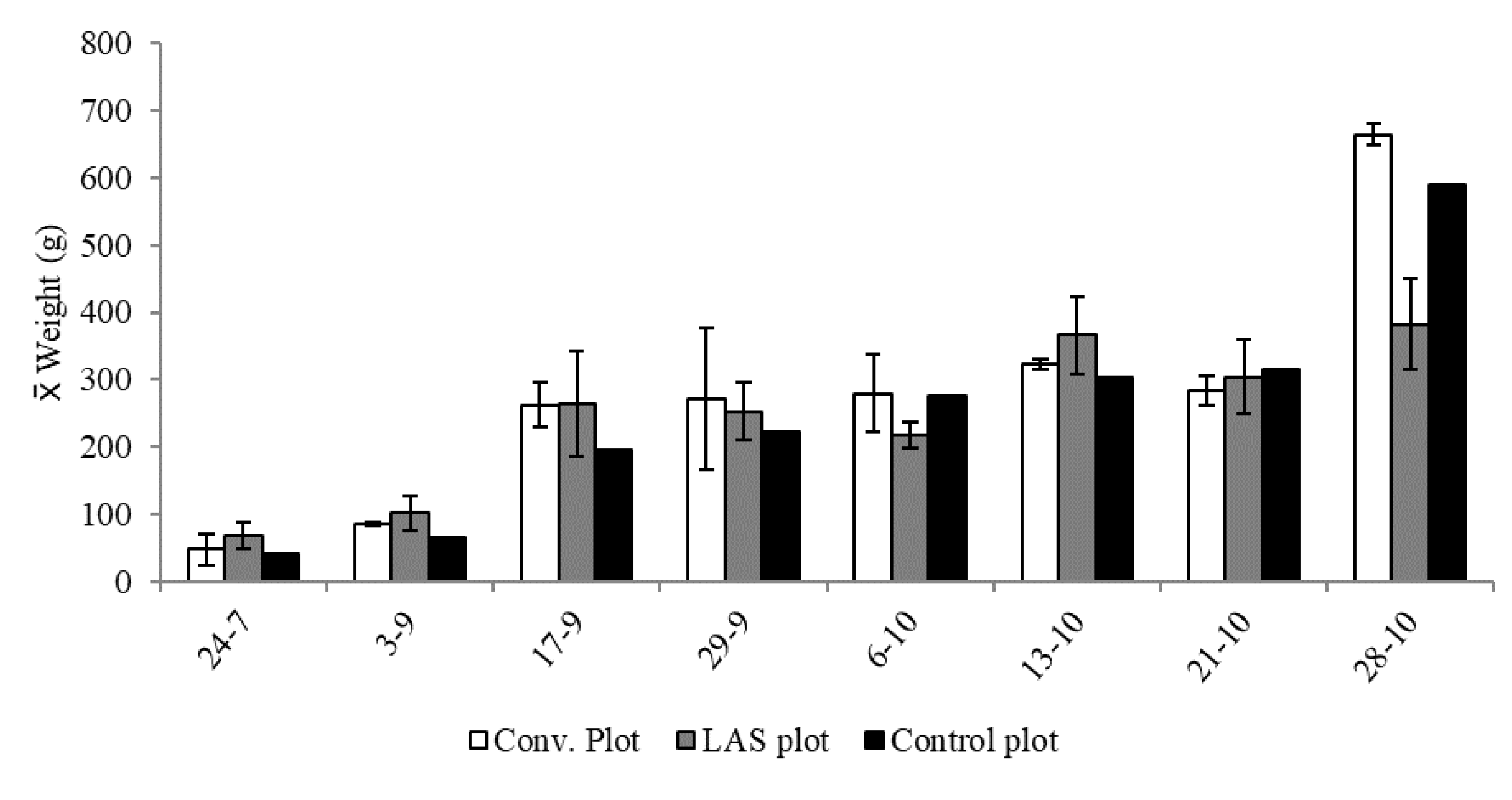
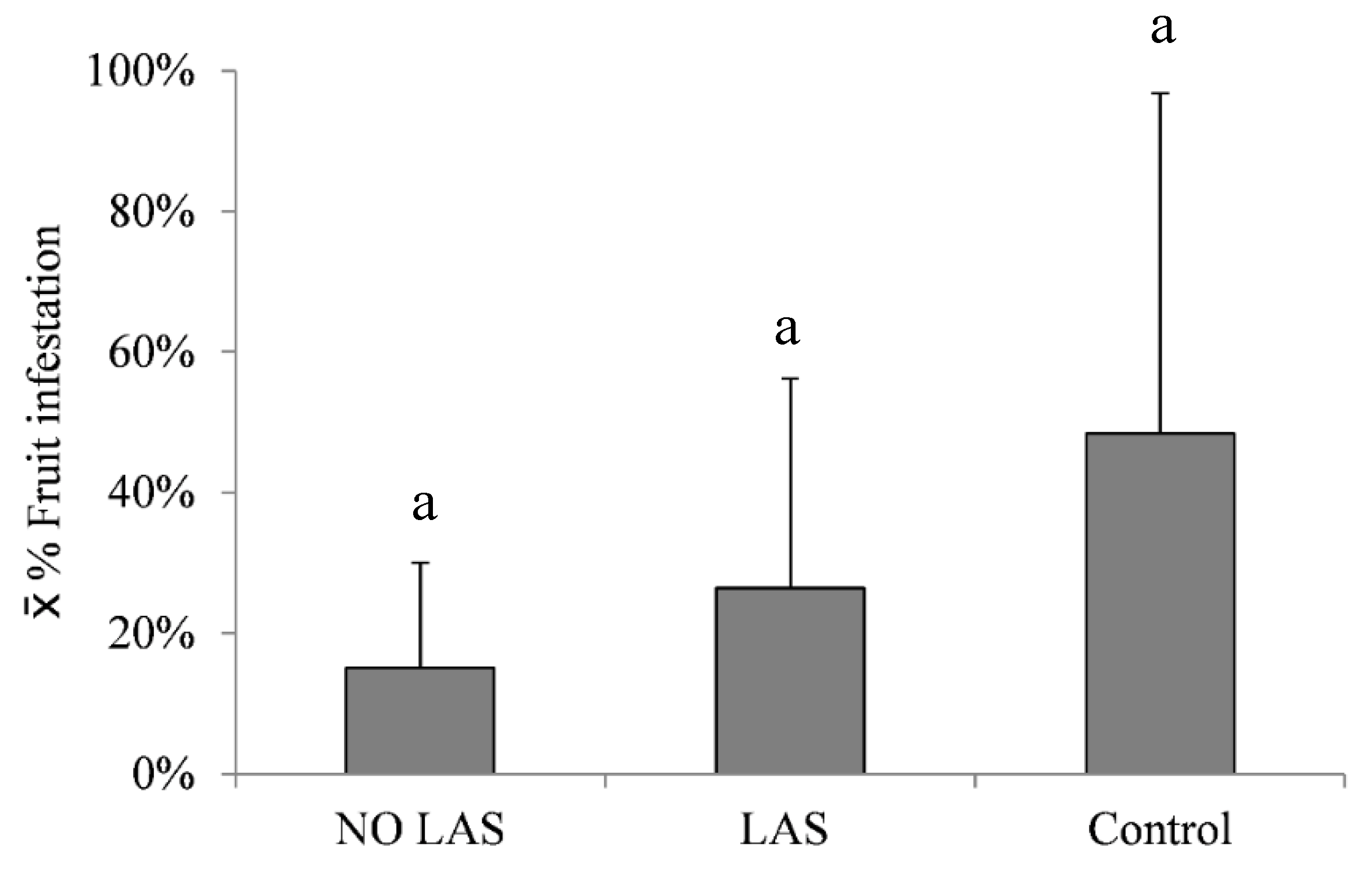
3.5. Fruit Infestation
3.6. Parasitism of Larvae
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kitchen, N.R. Emerging technologies for real-time and integrated agriculture decisions. Comput. Electron. Agric. 2008, 61, 1–3. [Google Scholar] [CrossRef]
- Stern, V.; Smith, R.; van den Bosch, R.; Hagen, K. The integration of chemical and biological control of the spotted alfalfa aphid: The integrated control concept. Hilgardia 1959, 29, 81–101. [Google Scholar] [CrossRef] [Green Version]
- Dias, N.P.; Zotti, M.J.; Montoya, P.; Carvalho, I.R.; Nava, D.E. Fruit fly management research: A systematic review of monitoring and control tactics in the world. Crop Prot. 2018, 112, 187–200. [Google Scholar] [CrossRef]
- McKinion, J.M.; Jenkins, J.N.; Willers, J.L.; Zumanis, A. Spatially variable insecticide applications for early season control of cotton insect pests. Comput. Electron. Agric. 2009, 67, 71–79. [Google Scholar] [CrossRef]
- Haff, R.P.; Saranwong, S.; Thanapase, W.; Janhiran, A.; Kasemsumran, S.; Kawano, S. Automatic image analysis and spot classification for detection of fruit fly infestation in hyperspectral images of mangoes. Postharvest Biol. Technol. 2013, 86, 23–28. [Google Scholar]
- Cohen, Y.; Cohen, A.; Hetzroni, A.; Alchanatis, V.; Broday, D.; Gazit, Y.; Timar, D. Spatial decision support system for Medfly control in citrus. Comput. Electron. Agric. 2008, 62, 107–117. [Google Scholar]
- Grasswitz, T.R. Integrated Pest Management (IPM) for Small-Scale Farms in Developed Economies: Challenges and Opportunities. Insects 2019, 10, 179. [Google Scholar] [CrossRef] [PubMed]
- Partel, V.; Nunes, L.; Stansly, P.; Ampatzidis, Y. Automated vision-based system for monitoring Asian citrus psyllid in orchards utilizing artificial intelligence. Comput. Electron. Agric. 2019, 162, 328–336. [Google Scholar] [CrossRef]
- Ding, W.; Taylor, G. Automatic moth detection from trap images for pest management. Comput. Electron. Agric. 2016, 123, 17–28. [Google Scholar] [CrossRef]
- Goldshtein, E.; Cohen, Y.; Hetzroni, A.; Gazit, Y.; Timar, D.; Rosenfeld, L.; Grinshpon, Y.; Hoffman, A.; Mizrach, A. Development of an automatic monitoring trap for Mediterranean fruit fly (Ceratitis capitata) to optimize control applications frequency. Comput. Electron. Agric. 2017, 139, 115–125. [Google Scholar]
- Shaked, B.; Amore, A.; Ioannou, C.; Valdés, F.; Alorda, B.; Papanastasiou, S.; Goldshtein, E.; Shenderey, C.; Leza, M.; Pontikakos, C.; et al. Electronic traps for detection and population monitoring of adult fruit flies (Diptera: Tephritidae). J. Appl. Entomol. 2017, 142, 1–9. [Google Scholar] [CrossRef]
- Jiang, J.A.; Tseng, C.L.; Lu, F.M.; Yang, E.C.; Wu, Z.S.; Chen, C.P.; Lin, S.H.; Lin, K.C.; Liao, C.S. A GSM-based remote wireless automatic monitoring system for field information: A case study for ecological monitoring of the oriental fruit fly, Bactrocera dorsalis (Hendel). Comput. Electron. Agric. 2008, 62, 243–259. [Google Scholar] [CrossRef]
- Kalamatianos, R.; Karydis, I.; Doukakis, D.; Avlonitis, M. DIRT: The Dacus Image Recognition Toolkit. J. Imaging 2018, 4, 129. [Google Scholar] [CrossRef]
- Pontikakos, C.M.; Tsiligiridis, T.A.; Drougka, M.E. Location-aware system for olive fruit fly spray control. Comput. Electron. Agric. 2010, 70, 355–368. [Google Scholar]
- Pontikakos, C.M.; Tsiligiridis, T.A.; Yialouris, C.P.; Kontodimas, D.C. Pest management control of olive fruit fly (Bactrocera oleae) based on a location-aware agro-environmental system. Comput. Electron. Agric. 2012, 87, 39–50. [Google Scholar]
- Nardi, F.; Carapelli, A.; Dallai, R.; Roderick, G.K.; Frati, F. Population structure and colonization history of the olive fly, Bactrocera oleae (Diptera, Tephritidae). Mol. Ecol. 2005, 14, 2729–2738. [Google Scholar] [CrossRef] [PubMed]
- Nestel, D.; Rempoulakis, P.; Yanovski, L.; Miranda, M.A.; Papadopoulos, N.T. The Evolution of Alternative Control Strategies in a Traditional Crop: Economy and Policy as Drivers of Olive Fly Control. In Advances in Insect Control and Resistance Management; Horowitz, A.R., Ishaaya, I., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 47–76. ISBN 978-3-319-31800-4. [Google Scholar]
- Fletcher, B.S. The Biology of Dacine Fruit Flies. Annu. Rev. Entomol. 1987, 32, 115–144. [Google Scholar] [CrossRef]
- Neuenschwander, P.; Michelakis, S. The infestation of Dacus oleae (Gmel.) (Diptera, Tephritidae) at harvest time and its influence on yield and quality of olive oil in Crete. Zeitschrift für Angew. Entomol. 1978, 86, 420–433. [Google Scholar] [CrossRef]
- Tzanakakis, M.E. Seasonal development and dormancy of insects and mites feeding on olive: A review. Netherlands. J. Zool. 2003, 52, 87–224. [Google Scholar] [CrossRef]
- Burrack, H.J.; Connell, J.H.; Zalom, F.G. Comparison of olive fruit fly (Bactrocera oleae (Gmelin)) (Diptera: Tephritidae) captures in several commercial traps in California. Int. J. Pest. Manag. 2008, 54, 227–234. [Google Scholar] [CrossRef]
- Alonso Muñoz, A.; García Marí, F. Eficacia del trampeo masivo en el control de la mosca del olivo Bactrocera oleae (Diptera: Tephritidae): Determinación del daño al fruto y de la pérdida económica en cantidad y calidad del aceite. Boletín Sanid. Veg. Plagas 2012, 38, 291–309. [Google Scholar]
- Tabic, A.; Yunis, H.; Wali, M.A.; Haddadin, J.; Hijawi, T.; Zchori-Fein, E. The use of OLIPE traps as a part of a regional effort towards olive fly (Bactrocera oleae Gmelin) control. Isr. J. Plant. Sci. 2011, 59, 53–58. [Google Scholar] [CrossRef]
- Broumas, T.; Haniotakis, G.E. Comparative Field Studies of Various Traps and Attractants of the Olive Fruit-Fly, Bactroceraoleae. Entomol. Exp. Appl. 1994, 73, 145–150. [Google Scholar] [CrossRef]
- Economopoulos AP Use of traps Based on Color and /or Shape. In Fruit Flies Their Biology Natural Enemies and Control, World Crop Pest 3B; Robinson, A.S.; Hooper, G. (Eds.) Elsevier: Amsterdam, the Netherlands, 1989; pp. 315–327. [Google Scholar]
- Mazomenos, B.E.; Pantazi-mazomenou, A.; Stefanou, D. Attract and kill of the olive fruit fly Bactrocera olear in Greece as a part of an integrated control system. IOBC wprs Bulletin 2002, 25, 1–11. [Google Scholar]
- Moreno Vázquez, R.; Montiel Bueno, A. Metodología utilizada en España para la realización de estudios bio - ecológicos sobre las poblaciones naturales del Dacus oleae (Gmel.). Resultados provisionales obtenidos en dos años de trabajo. Boletín de Sanidad Vegetal. Plagas 1982, 8, 43–53. [Google Scholar]
- Petacchi, R.; Guidotti, D.; Rizzi, I. Spatial data analysis in integrated pest management in olive growing. In Proceedings of the Acta Horticulturae, 30 October 2002; Vol. 586, pp. 835–839. [Google Scholar]
- Guidotti, D.; Ragaglini, G.; Petacchi, R. Analysis of spatio-temporal Bactrocera oleae (Diptera, Tephritidae) infestation distributions obtained from a large-scale monitoring network and its importance to IPM. Integr. Prot. Olive Crop. IOBC/wprs Bull. 2005, 28, 13–18. [Google Scholar]
- Nestel, D.; Carvalho, J.; Nemny-Lavy, E. The Spatial Dimension in the Ecology of Insect Pests and Its Relevance to Pest Management. In Insect Pest Management; Springer Berlin Heidelberg: Berlin, Heidelberg, Germany, 2004; pp. 45–63. [Google Scholar]
- Biondi, A.; Mommaerts, V.; Smagghe, G.; Viñuela, E.; Zappalà, L.; Desneux, N. The non-target impact of spinosyns on beneficial arthropods. Pest. Manag. Sci. 2012, 68, 1523–1536. [Google Scholar] [CrossRef] [PubMed]
- González-Núñez, M.; Pascual, S.; Seris, E.; Esteban-durán, J.R. Effects of different control measures against the olive fruit fly (Bactrocera oleae (Gmelin )) on beneficial arthropod fauna. Methodology and first results of field assays. Pestic. Benef. Org. IOBC/wprs Bull. 2008, 35, 26–31. [Google Scholar]
- Pascual, S.; Cobos, G.; Seris, E.; Sánchez-Ramos, I.; González-Núñez, M. Spinosad bait sprays against the olive fruit fly (Bactrocera oleae (Rossi)): Effect on the canopy non-target arthropod fauna. Int. J. Pest. Manag. 2014, 60, 37–41. [Google Scholar] [CrossRef]
- Miranda, M.A.; Miquel, M.; Terrassa, J.; Melis, N.; Monerris, M. Parasitism of Bactrocera oleae (Diptera; Tephritidae) by Psyttalia concolor (Hymenoptera; Braconidae) in the Balearic Islands (Spain). J. Appl. Entomol. 2008, 9–10, 132. [Google Scholar]
- Alorda, B.; Valdés, F.; Mas, B.; Leza, M.; Almenar, L.; Feliu, J.; Ruiz, M.; Miranda, M.A. Design of an energy efficient and low cost trap for Olive fly monitoring using a ZigBee based Wireless Sensor Network. In Proceedings of the 10th European Conference on Precision Agriculture, Volcani Center, Israel, 12–16 July 2015. [Google Scholar]
- Yasin, S.; Rempoulakis, P.; Nemny-Lavy, E.; Levi-Zada, A.; Tsukada, M.; Papadopoulos, N.T.; Nestel, D. Assessment of lure and kill and mass-trapping methods against the olive fly, Bactrocera oleae (Rossi), in desert-like environments in the Eastern Mediterranean. Crop. Prot. 2014, 57, 63–70. [Google Scholar] [CrossRef]
- Francisco, J.; De, F.; Pérez, M.R.; Valdes, F.; Bartomeu, C.; Ladaira, A. Plataforma tecnológica para el control de la plaga de la mosca del olivo. In Proceedings of the Geographic information science and technology conference (TIG), Malaga, Spain, 30 July 2016; pp. 474–483. [Google Scholar]
- Sanz-Cortés, F.; Martinez-Calvo, J.; Badenes, M.L.; Bleiholder, H.; Hack, H.; Llacer, G.; Meier, U. Phenological growth stages of olive trees (Olea europaea). Ann. Appl. Biol. 2002, 140, 151–157. [Google Scholar] [CrossRef]
- Genç, H.; Nation, J.L. Survival and development of Bactrocera oleae Gmelin (Diptera:Tephritidae) immature stages at four temperatures in the laboratory. African, J. Biotechnol. 2008, 7, 2495–2500. [Google Scholar]
- CAIB Resolució del director general d’Agricultura i Desenvolupament Rural de 7 de juliol de 2010 per la qual s’estableix la Norma tècnica per a la producció integrada d’olivar a l’àmbit de la comunitat autònoma de les Illes Balears. Annex VI Control Integrado; BOIB Num. 116 07-08-2010. 2010; 37–41.
- Doitsidis, L.; Fouskitakis, G.N.; Varikou, K.N.; Rigakis, I.I.; Chatzichristofis, S.A.; Papafilippaki, A.K.; Birouraki, A.E. Remote monitoring of the Bactrocera oleae (Gmelin) (Diptera: Tephritidae) population using an automated McPhail trap. Comput. Electron. Agric. 2017, 137, 69–78. [Google Scholar] [CrossRef]
- Tirelli, P.; Borghese, N.A.; Pedersini, F.; Galassi, G.; Oberti, R. Automatic monitoring of pest insects traps by Zigbee-based wireless networking of image sensors. In Proceedings of the 2011 IEEE International Instrumentation and Measurement Technology Conference (I2MTC); IEEE: New York, NY, USA, 2011; pp. 1192–1196. [Google Scholar]
- Dimou, I.; Koutsikopoulos, C.; Economopoulos, A.; Lykakis, J. The distribution of olive fruit fly captures with McPhail traps within an olive orchard. Phytoparasitica 2003, 31, 124–131. [Google Scholar] [CrossRef]
- Ortega, M.; Pascual, S.; Rescia, A.J. Spatial structure of olive groves and scrublands affects Bactrocera oleae abundance: A multi-scale analysis. Basic Appl. Ecol. 2016, 17, 696–705. [Google Scholar] [CrossRef]
- Wang, X.-G.; Johnson, M.W.; Daane, K.M.; Nadel, H. High Summer Temperatures Affect the Survival and Reproduction of Olive Fruit Fly (Diptera: Tephritidae). Environ. Entomol. 2009, 38, 1496–1504. [Google Scholar] [CrossRef] [PubMed]
- Fletcher, B.S.; Pappas, S.; Kapatos, E. Changes in the ovaries of olive flies (Dacus oleae (Gmelin)) during the summer, and their relationship to temperature, humidity and fruit availability. Ecol. Entomol. 1978, 3, 99–107. [Google Scholar] [CrossRef]
- Kakani, E.G.; Zygouridis, N.E.; Tsoumani, K.T.; Seraphides, N.; Zalom, F.G.; Mathiopoulos, K.D. Spinosad resistance development in wild olive fruit fly Bactrocera oleae (Diptera: Tephritidae) populations in California. Pest. Manag. Sci. 2010, 66, 447–453. [Google Scholar]
- Kampouraki, A.; Stavrakaki, M.; Karataraki, A.; Katsikogiannis, G.; Pitika, E.; Varikou, K.; Vlachaki, A.; Chrysargyris, A.; Malandraki, E.; Sidiropoulos, N.; et al. Recent evolution and operational impact of insecticide resistance in olive fruit fly Bactrocera oleae populations from Greece. J. Pest. Sci. (2004). 2018, 91, 1429–1439. [Google Scholar] [CrossRef]
- Barrios, G.; Mateu, J.; Ninot i Cort, A.; Romero, A.; Vichi, S. Sensibilidad varietal del olivo a Bactrocera oleae y su incidencia en la Gestión Integrada de Plagas. Phytoma España La Rev. Prof. Sanid. Veg. 2015, 21. [Google Scholar]
- Lowenberg-DeBoer, J.; Erickson, B. Setting the Record Straight on Precision Agriculture Adoption. Agron. J. 2019, 111, 1552. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | #Plot NO-LAS | Surface (ha) | Vol. of Broth (L) | Plot LAS | Surface (ha) | Vol. of Broth (L) |
|---|---|---|---|---|---|---|
| 16/07/15 | 2(e) | 1 | 11 | 2(e) | 1 | 11 |
| 11/09/15 | 1(p) | 1 | 11 | 1(p) | 0.5 | 5.5 |
| 2(e) | 1 | 11 | 2(e) | 1 | 11 | |
| 3(p) | 1 | 11 | - | - | - | |
| 17/09/15 | 1(p) | 1 | 11 | 1(p) | 0.25 | 2 |
| 2(e) | 1 | 11 | - | - | - | |
| 24/09/15 | 1(p) | 1 | 11 | 1(p) | 0.5 | 5.5 |
| 2(e) | 1 | 11 | - | - | - | |
| 1-2/10/15 | 1(p) | 1 | 11 | 1(p) | 0.75 | 11 |
| 2(e) | 1 | 22 | 3(p) | 1 | 22 | |
| 3(p) | 1 | 22 | - | - | - | |
| 16/10/15 | 1(p) | 1 | 22 | 1(p) | 1 | 22 |
| 2(e) | 1 | 22 | 2(e) | 1 | 22 | |
| 3(p) | 1 | 22 | 3(p) | 1 | 22 | |
| Total | 14 | 209 | 8 | 132 |
| Indicator | NO-LAS | LAS | % Reduction |
|---|---|---|---|
| Pilot Area | 3 ha (1 ha/plot) | 3 ha (1 ha/plot) | - |
| No. of Pesticide Applications | 6 | 6 | 0 |
| Insecticide treated area (ha) | 14 | 8 | −42.85 |
| Volume of Pesticide Applied (L) | 209 | 132 | −36.84 |
| Tractor path length (Km) | 24.11 | 14.10 | −41.52 |
| Spraying duration (min) | 317 | 185 | −41.64 |
| LAS 1 | LAS 2 | LAS 3 | Total | |
|---|---|---|---|---|
| N trees | 197 | 119 | 192 | 508 |
| Average FL (%) | 18.5 ± 25.8a | 45.3 ± 39.0b | 34.0 ± 36.5c | 32.7 ± 36.0 |
| Max. FL (%) | 90 | 90 | 90 | 90 |
| Min. FL (%) | 0 | 0 | 0 | 0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miranda, M.Á.; Barceló, C.; Valdés, F.; Feliu, J.F.; Nestel, D.; Papadopoulos, N.; Sciarretta, A.; Ruiz, M.; Alorda, B. Developing and Implementation of Decision Support System (DSS) for the Control of Olive Fruit Fly, Bactrocera Oleae, in Mediterranean Olive Orchards. Agronomy 2019, 9, 620. https://doi.org/10.3390/agronomy9100620
Miranda MÁ, Barceló C, Valdés F, Feliu JF, Nestel D, Papadopoulos N, Sciarretta A, Ruiz M, Alorda B. Developing and Implementation of Decision Support System (DSS) for the Control of Olive Fruit Fly, Bactrocera Oleae, in Mediterranean Olive Orchards. Agronomy. 2019; 9(10):620. https://doi.org/10.3390/agronomy9100620
Chicago/Turabian StyleMiranda, Miguel Ángel, Carlos Barceló, Ferran Valdés, José Francisco Feliu, David Nestel, Nikolaos Papadopoulos, Andrea Sciarretta, Maurici Ruiz, and Bartomeu Alorda. 2019. "Developing and Implementation of Decision Support System (DSS) for the Control of Olive Fruit Fly, Bactrocera Oleae, in Mediterranean Olive Orchards" Agronomy 9, no. 10: 620. https://doi.org/10.3390/agronomy9100620