1. Introduction
Crop breeding requires continued investment to maintain performance, particularly against the evolving resistances of pests and diseases to control measures, and to improve yields as crop production spreads into increasingly marginal environments that are now also subject to the additional risk of the negative impacts of climate change. The delivery of new cultivars can be accelerated directly through faster means of the generation of progeny and improved understanding of the genetic control of adaptive traits that facilitate earlier, faster selection of superior lines. Given this powerful capability to map and manipulate the genetics of crops, the limit to progress in improving adaptation traits is now our understanding and measurement of the phenotype in the field, an area of research described as field-based phenotyping (FBP), and which can be facilitated by using various remote-sensing platforms to monitor plant growth and development [
1,
2].
Breeding utilizes the knowledge of how the genetic composition of lines within species that can be best combined to maximize the expression of phenotypes, such as yield. Over the last 30 years or so, between the development of molecular markers and now the regular use of mapped genomic information, plant breeding has benefited from the application of these technologies to accelerate the identification of target genotypes. The price of high-density genomic screens, such as SNP chips (5000 to 500,000 genes are typical) is dropping, such that they are becoming less than the cost of a single yield plot evaluation (
ca. USD$10 to 40) in a breeding program,
i.e., for the cost of an extra yield plot or the substitution of one, breeders may obtain a genomic screen that facilitates a statistical prediction of the genotype. This approach allows breeders to undertake DNA screens on large numbers of individual seeds from multiple crosses and to plant only those which, based on pedigree, are predicted to have the maximum expectation for increased yield through the pyramiding of multiple gene segments [
3]. New breeding methods, such as doubled-haploids, off-season nurseries and embryo rescue, as well as powerful statistical techniques to adjust for within and between trial environment effects have also reduced the time between an initial cross and a delivered cultivar. With these technological advances, the exploitation of novel genetic resources and the recombination of these and current genetics is able to be done faster than ever before. With the acceleration of the delivery of both genetic data and of new offspring, the collection of phenotypic data is therefore now the major limiting factor in being able to design and predict outcomes in breeding programs.
Some phenotypes associated with abiotic adaptation can be evaluated precisely in non-field conditions, e.g., flowering time responses to temperature and photoperiod, seedling vigour and early root development. In dryland cropping, the yield is the outcome of complex interactions of the crop canopy and root system and the partitioning of assimilates to economic yield. If we could better track the development of these resource-capturing systems and their consequent effects on the dynamics of crop water use and growth and partitioning to yield, then it would be possible to identify genotypes with more robust and/or optimal growth patterns to stabilise or maximize yield in the variable environments experienced by dryland farmers. Growth-associated characteristics of plants, such as chlorophyll content and water content, can be quantified using remote-sensing instruments to calculate indices based on the reflectance of different spectra from the canopy. In recent years, the application of such indices has moved from scientific investigation to commercial application with indices, such as NDVI (Normalised Difference Vegetation Index), being used to identify weeds in fallowed fields and to manage in-season nitrogen requirement of crops [
4]. New instruments and methods are providing an increasingly diverse set of indices to measure characteristics in field experiments, including canopy temperature [
5], pigments, like anthocyanins and carotenoids [
6,
7], water content indices [
8], water potential of leaves [
9] and other adaptation traits, such as the stem content of water-soluble carbohydrates [
10]. Many of these indices have been found to have associations with the adaptation of crops to drought or well-watered conditions to the degree that they begin to separate the predicted yield performance of different genotypes [
11].
There has been a long history of the application of both satellite remote-sensing and yield monitoring systems in agricultural production and the prediction of fertilizer needs or yields at the paddock, farm and regional scales. Plot-level harvesters were developed in the mid-20th century, and their use in breeding has been successfully augmented by visual observations and scoring, improved experiment design and statistical analysis and electronic data capture systems. Objective high-throughput phenotypic screening supported by appropriate instruments, vehicles and data processing tools are now being developed. White
et al., 2012 [
1], extensively reviewed the criteria and needs for field-based phenotyping and considered the options for proximal sensing of different characteristics of crops, including the characterization of crop development, leaf canopy and above-ground biomass over time and the condition of the canopy under different nutrient, heat and drought stress conditions. For data acquisition, they evaluated five vehicle options, including helicopters. With the miniaturisation of sensing instruments, such as cameras and scanning detectors, it becomes possible to implement these systems on unmanned aircraft, also commonly known as unmanned aerial vehicles (UAVs) or unmanned aircraft systems (UASs).
As noted by Merz and Chapman (2011) [
12], UAS have been deployed for vegetation monitoring, photogrammetric survey and infrastructure inspection [
13,
14,
15,
16,
17]. These craft have the advantage of allowing sensing with high spatial and spectral resolution at a relatively low cost, subject to the regulations of the country in which they are operated. The low altitude flight allows the use of less expensive sensors, compared to those needed in manned aircraft, without disturbing the local conditions above the crop canopy, even down to 10 to 15 m of elevation. The other advantages of UASs are their speed of deployment and of data collection and ability to access trials when the field is water-logged or untrafficable. The canopy temperature of crops is an indicator of their stress condition [
18], but it is extremely sensitive to small changes in cloud cover and wind speed [
19], causing this trait to be difficult to assess through slow ground-based methods. Water-logged conditions or the lodging of trials normally prevent any operations via ground-based vehicles, and in taller crops, such as sugarcane and maize, it is not possible for these vehicles to access the crops later in the season without causing substantial damage to the trial. Laneways can facilitate access in these crops, but can greatly increase the size of the experiment and consequent cost. Further, while ground-based vehicles may be suitable for research farm applications, plant breeding typically entails multiple field experiments grown on commercial properties over a large geographic area spanning >1000 km in extent for sorghum, wheat, cotton or sugarcane in Australia. These trials may only be visited on three or four occasions, including when the plots are harvested, so that timely visits with FBP ground vehicles would be greatly constrained by transport and operator costs, as well as the ground conditions at the time of visit.
Automated unmanned platforms can be quickly and cheaply transported and, with appropriate training, deployed by local operators. However, little is known about the dependability of the commercial off-the-shelf (COTS) UAS for field crop research, and the systems are typically not optimized for that particular application. On the other hand, many components of the system described here have already been proven in other The Commonwealth Scientific and Industrial Research Organisation (CSIRO) research projects (see below).
Merz and Chapman (2011) [
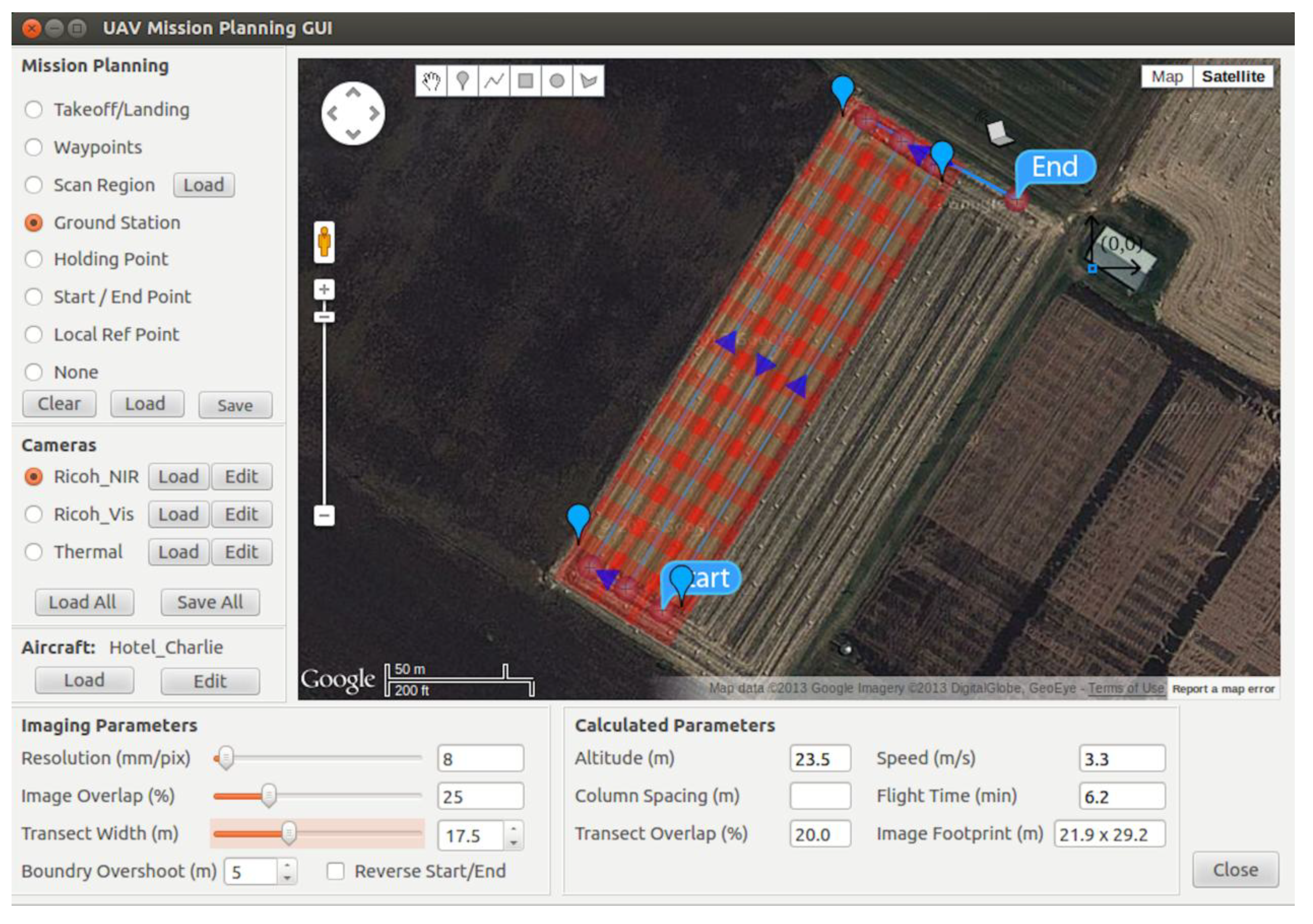
12] described the automation of the data acquisition using a customized unmanned aircraft based on a COTS remote control (COTS RC) helicopter to undertake low-altitude, way-point following missions; alias “Pheno-Copter” (
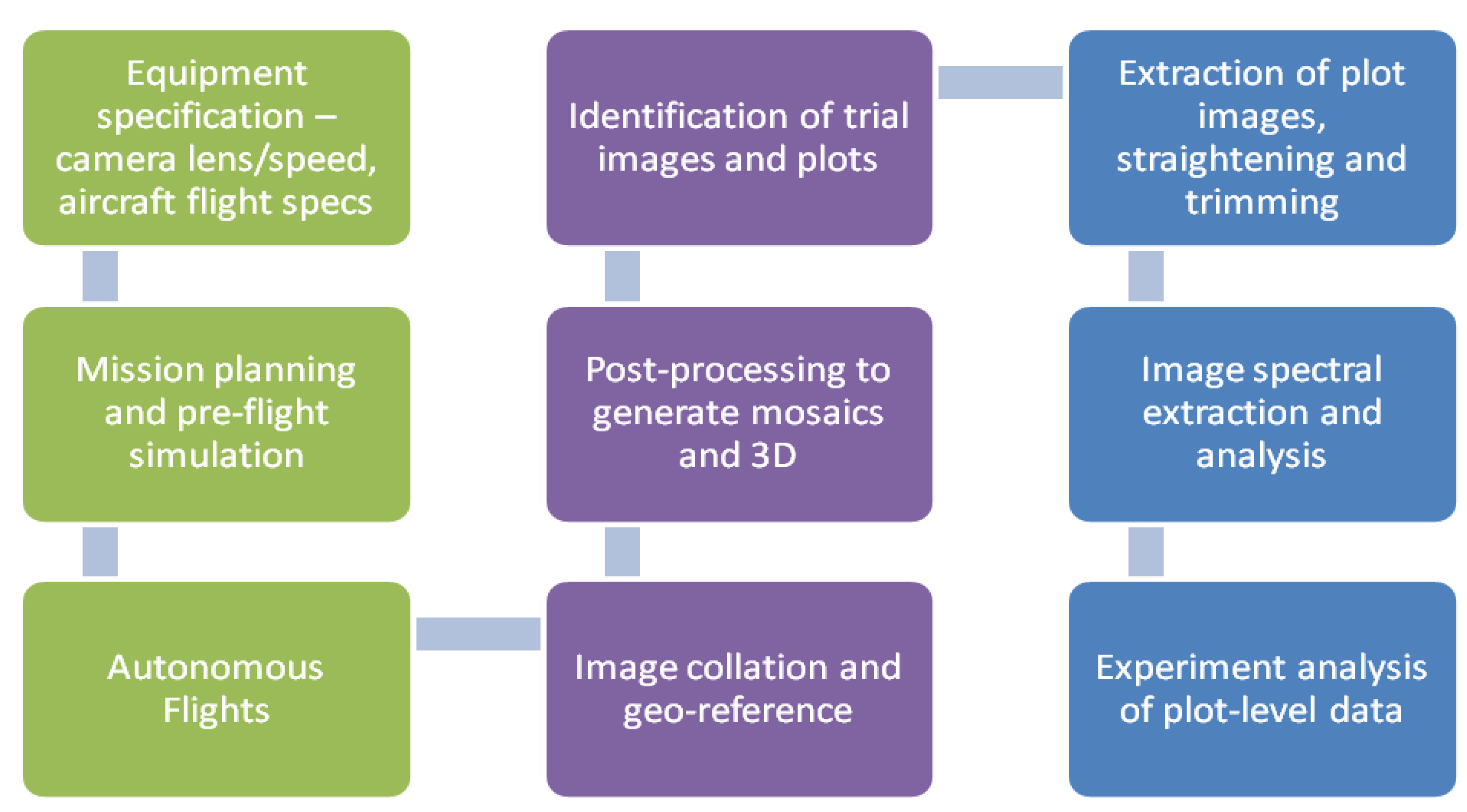
Figure 1). In this paper, we outline the further development of the hardware and software capabilities of the platform to provide a software workflow solution for plot-based experiments (
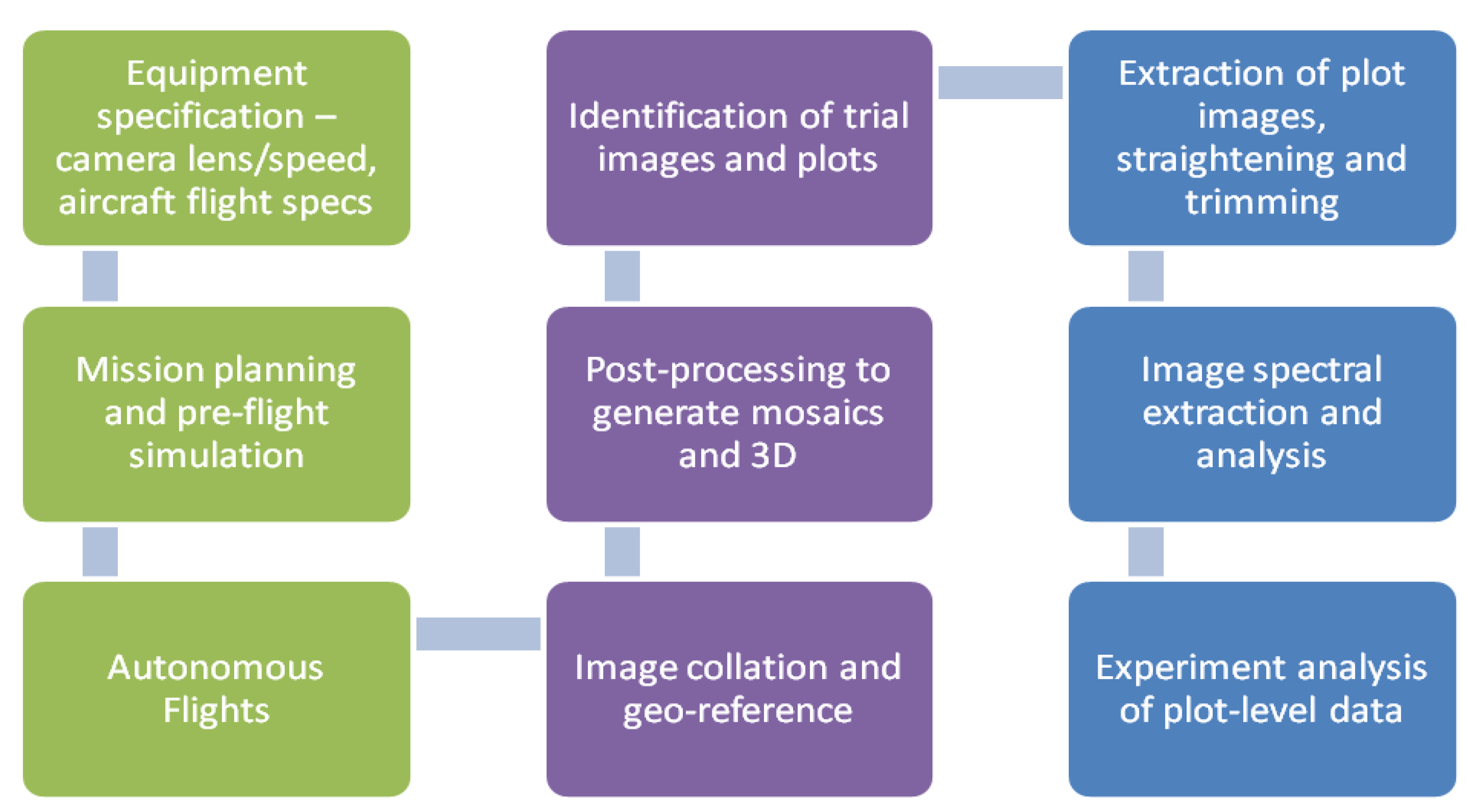
Figure 2), and we assess the utility of this platform and software in the collection of phenotypic data in breeding trials of sorghum, wheat, cotton and sugarcane. The paper does not provide comprehensive ground-truthing of the datasets, as these analyses are still on-going, but rather aims to overview the performance and capabilities of the system and to identify research needs for improvement.
Figure 1.
The platform as fitted out for Pheno-Copter work, which can be flown with a radio transmitter only or via a touch-screen control and monitoring ground station (inset).
Figure 1.
The platform as fitted out for Pheno-Copter work, which can be flown with a radio transmitter only or via a touch-screen control and monitoring ground station (inset).
Figure 2.
Aerial image analysis workflow showing pre-flight (left), post-flight (centre) and image processing (right) tasks.
Figure 2.
Aerial image analysis workflow showing pre-flight (left), post-flight (centre) and image processing (right) tasks.
2. Results and Discussion
Research on the utility of applying autonomous systems technology in plant breeding field experiments began in 2009, followed by improvements in hardware and software systems for both gathering and processing the images between 2011 and 2013. This section provides an evaluation of the performance of the platform for FBP applications in multiple crops, considering the use of aerial imagery to detect crop cover and crop canopy temperature and to generate digital elevation models of variations in crop height related to the lodging of the plots.
2.1. Evaluation of Pheno-Copter Performance
The first version of the CSIRO platform as a Pheno-Copter was flown at The University of Queensland campus, Gatton, Queensland (27.55° S, 152.34° E), on September 10, 2009, following a manually-created way-point route and carrying a single digital compact camera with continuous time delay triggering. Details of the system requirements for task and of the platform and cameras are given in the
Experimental Section. In its most recent guise, the flight-plan was automatically generated and the entire flight of three cameras was autonomous, except for the operator needing to control the vertical descent speed on landing and to signal the touchdown. Log books are kept for these helicopters, recording flight times, maintenance, technical problems and incidents, and the on-board computer retains detailed flight logs. These logs include the position and attitude of the helicopter, image capture events and detailed information on many aspects of the helicopter system performance (engine parameters, servo commands, parameters of the electric power system,
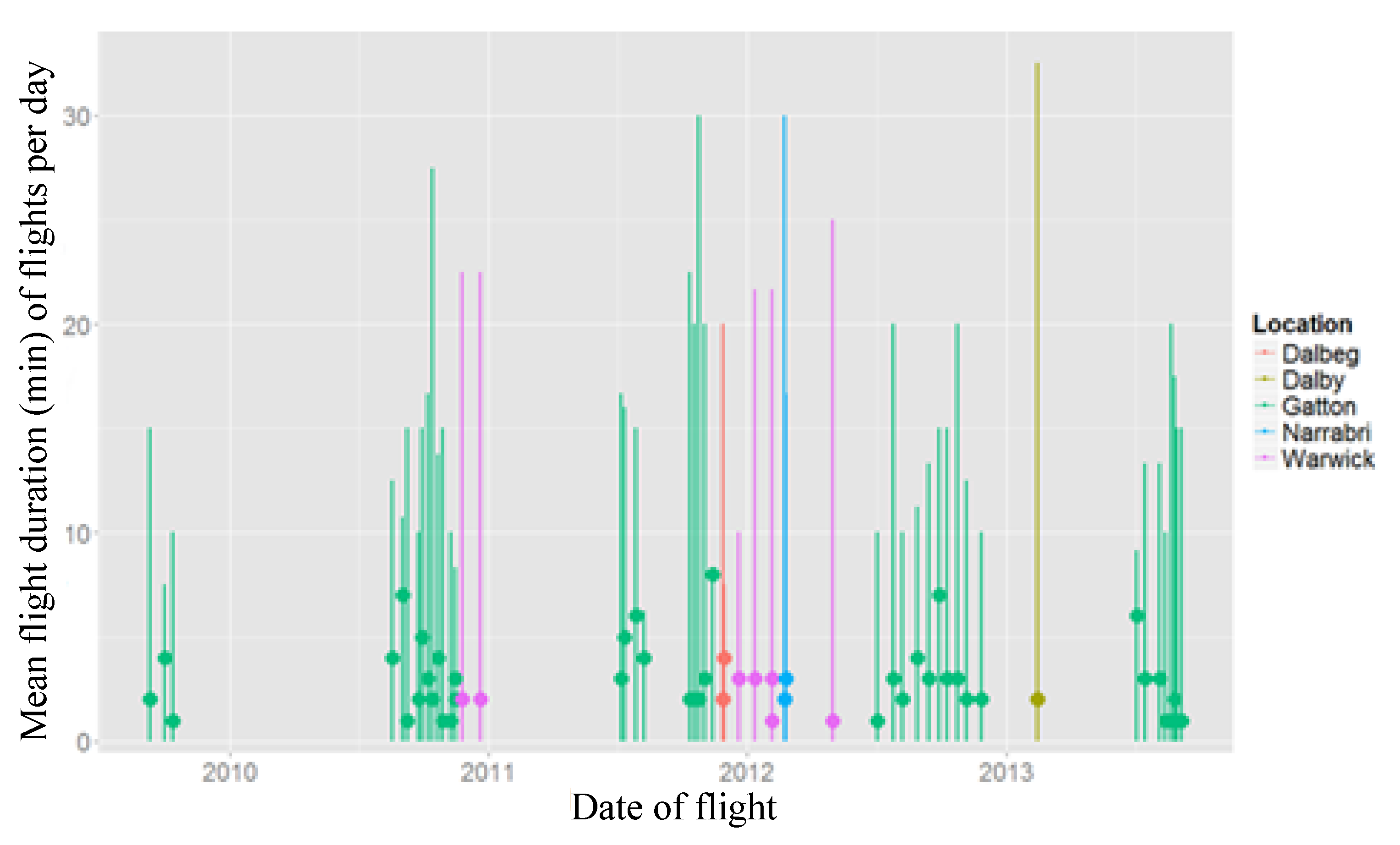
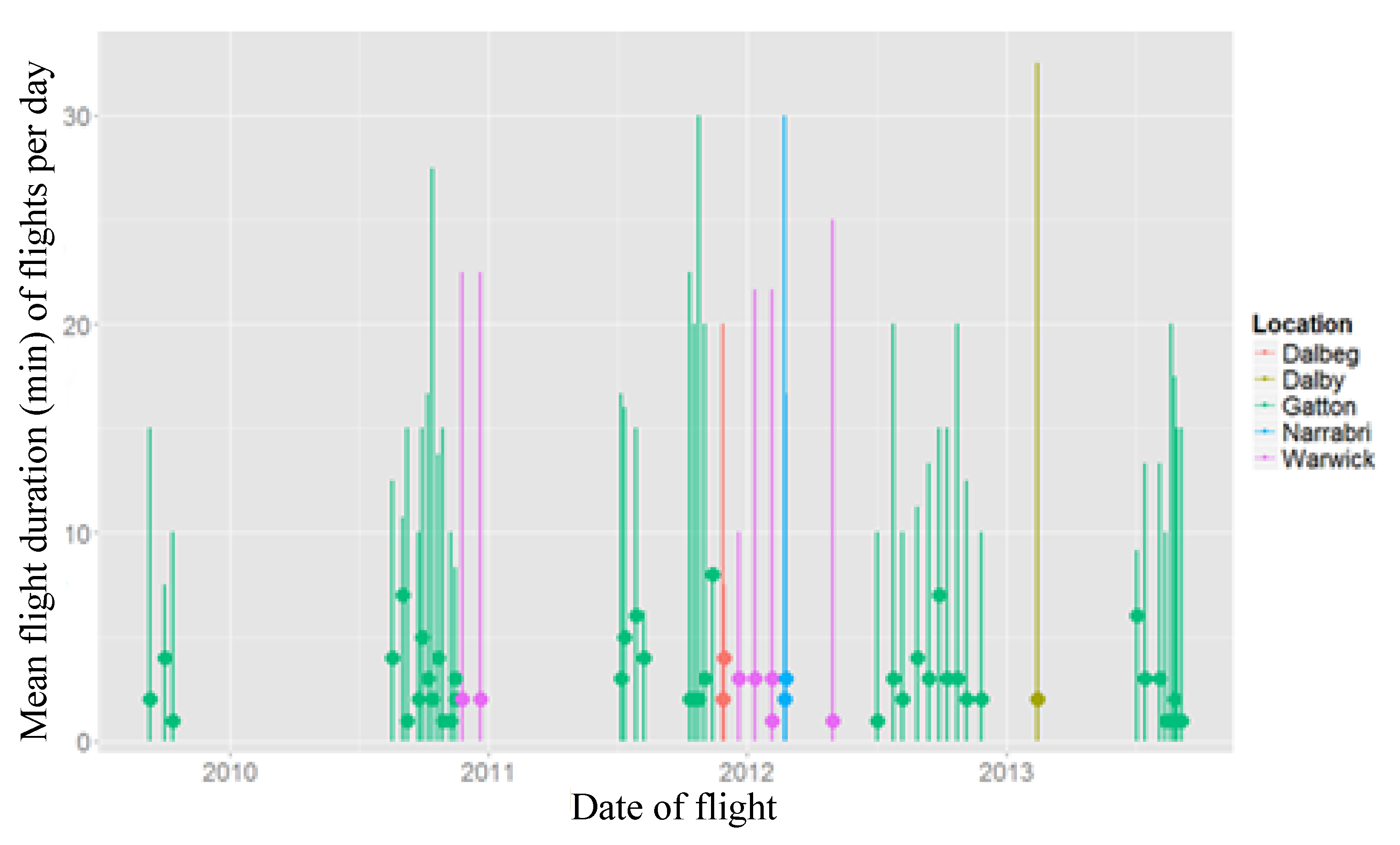
etc.). Since 2009, 155 Pheno-Copter flights have been logged using four of six available helicopters on 55 days, for 37.5 flight hours and an average flight time of just over 15 min (
Figure 3). Between August, 2008, and March, 2014, and including other research applications, the six CSIRO helicopters of the same type have completed more than 275 flight hours and more than 1500 landings, with the loss of four. Two of the Pheno-Copters were lost—one, the mechanical failure of the COTS, and one, operator error, with the other two losses in other applications also being mechanical failures of the COTS. Record keeping and thorough failure analysis has allowed the continuous improvement of the helicopter system through the development of better components, the replacement of components and new inspection and maintenance procedures. Manual checks are performed before each flight, and flight tests are conducted whenever a system component is modified, following a strict protocol. With the current helicopter system, the most laborious maintenance tasks are the replacement of the engine after 25 h of use and the maintenance of the airframe every 30 h.
Figure 3.
The average duration of flights (columns) and number of flights per day (symbols) between September, 2009, and September, 2013, at five locations for crops of wheat (Gatton 27.55° S, 152.34° E), sorghum (Dalby 27.36° S 151.24° E, Warwick 28.22° S, 152.10° E), sugarcane (Dalbeg 20.2° S, 147.3° E) or cotton (Narrabri 30.20° S, 149.61° E).
Figure 3.
The average duration of flights (columns) and number of flights per day (symbols) between September, 2009, and September, 2013, at five locations for crops of wheat (Gatton 27.55° S, 152.34° E), sorghum (Dalby 27.36° S 151.24° E, Warwick 28.22° S, 152.10° E), sugarcane (Dalbeg 20.2° S, 147.3° E) or cotton (Narrabri 30.20° S, 149.61° E).
The Pheno-Copter has been demonstrated to be sufficiently reliable to undertake up to seven flights per day and almost two hours of flight time. Allowing 5 min for take-off/landing and a standard cruising speed of 3 m s−1 when taking images, the platform has flown more than 250 km so far. When flown by an operator without piloting skills in 2013 in its near-completely autonomous form (operator-assisted landing), the flight time was preceded by about 10 to 15 min of pre-flight setup and tethered engine testing (automated), so that the 3 ha of field experiments at Gatton could be imaged in 20 to 30 min. With its payload capacity of about 1.5 kg for 30 min endurance or 1.1 kg for 60 min endurance, a major advantage of the platform compared to smaller electric rotorcraft is that it could carry all three cameras and cover the whole area in a single flight. This provides a consistent dataset and reduces the field flight time. A small COTS electric octocopter, which was evaluated until it failed after six missions, needed, for five flights, at least twice the field flight time compared to the Pheno-Copter and required charging of at least 10 battery packs over the day. Moreover, the pitch and roll angles of the airframe of our single-rotor helicopter were relatively small during steady flight in low-wind conditions, eliminating the need for an attitude angle-compensated camera system.
2.2. Estimation of Ground Cover of Hybrids in a Sorghum Breeding Trial
Plant breeders frequently record “establishment” scores to use as independent co-variates in their analyses of yield trials. These assessments of ground cover are typically made visually or with ground-level digital images, need to be made in a timely fashion several weeks after planting, regardless of soil conditions, and require substantial labour to collect in large experiment programs.
In early 2011, a sorghum trial comprising >900 genotypes grown in two-row (1.8 m wide) plots that were each 4 m in length was machine planted at the Hermitage Research Station in Warwick (28.2° S, 152.0° E) as part of the state breeding research program [
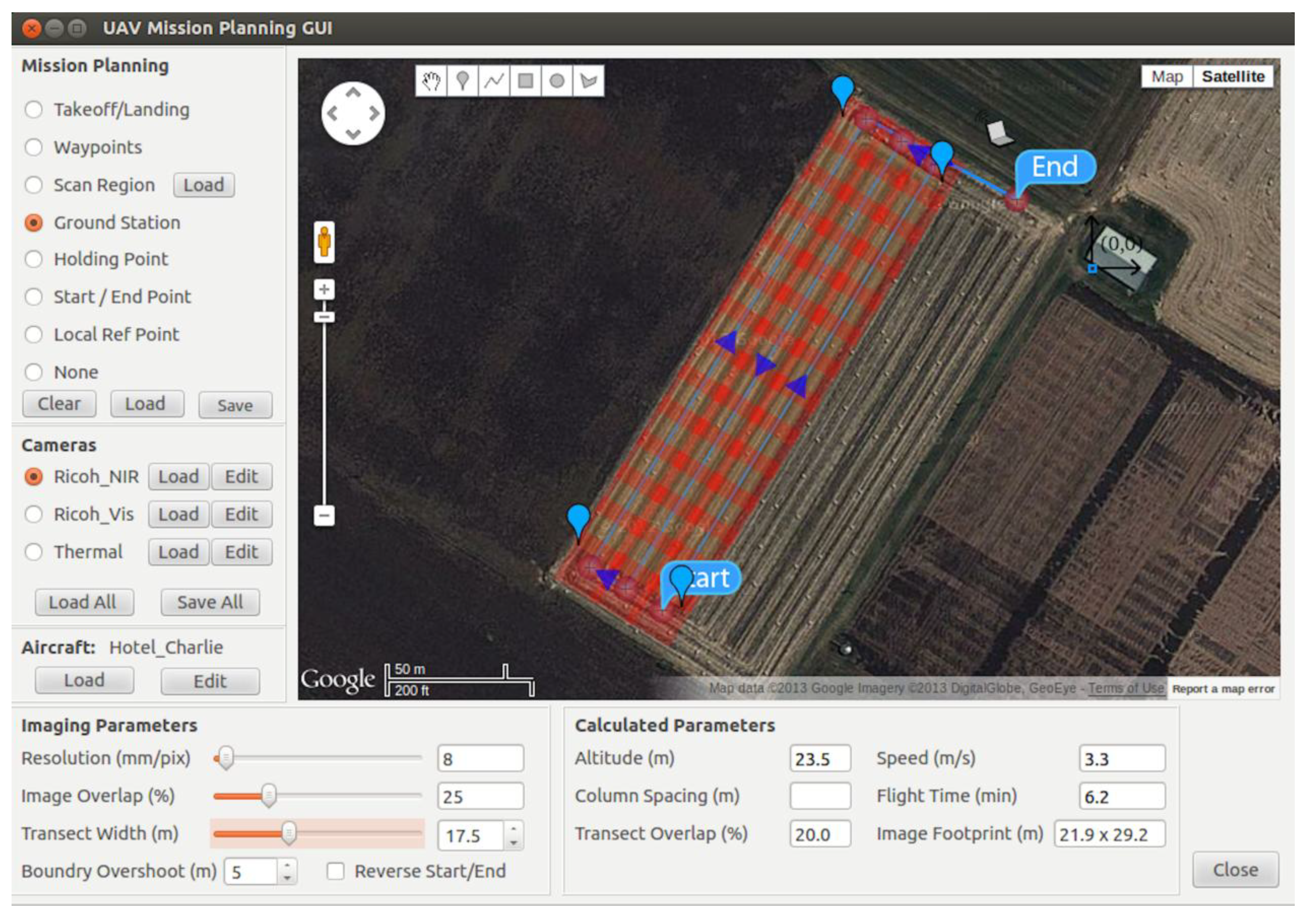
20]. The trial was a row/column design with augmented check genotypes distributed across the experiment. The crop had variable establishment, as many of the genotypes varied in their seed viability and vigour, so that there was substantial variation in the plant stand. On December 21, 2011, at six weeks after sowing, a flight was made at 60 m of elevation using the digital visual camera (see
Experimental Section) and following a grid-like plan as similar to the example that is discussed in the in
Experimental Section.
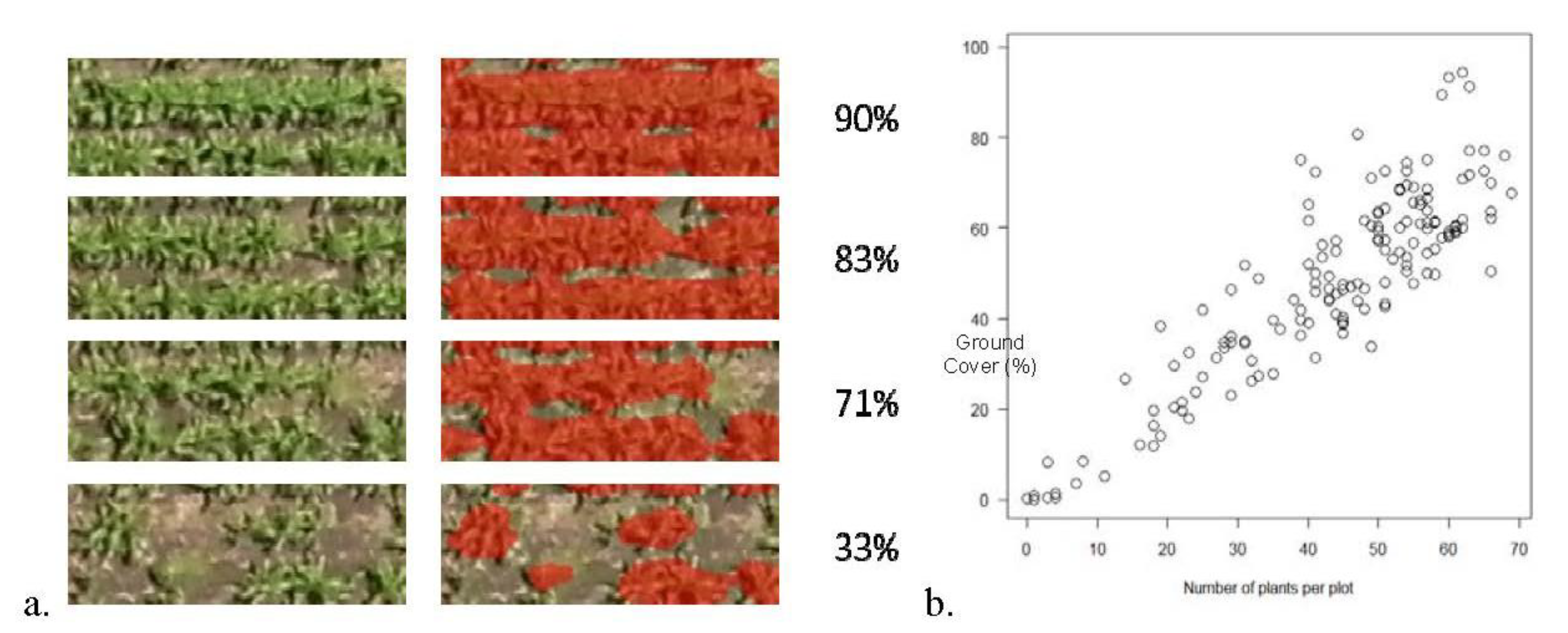
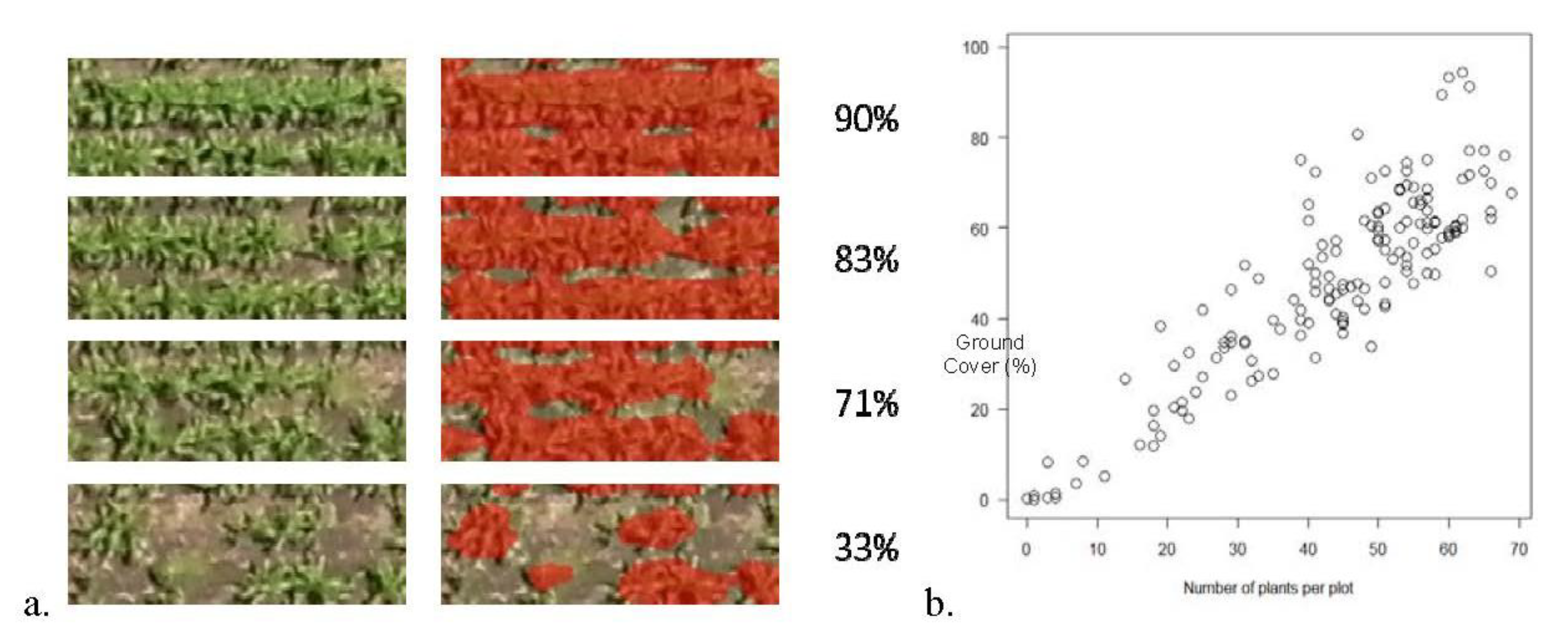
Analyses of images that covered the entire experiment were thresholded to estimate green cover in each plot, with a range of contrasting adjacent plots shown in
Figure 4. Within two days of the flight, plant counts were made in 100 random plots, with these counts having a strong correlation (
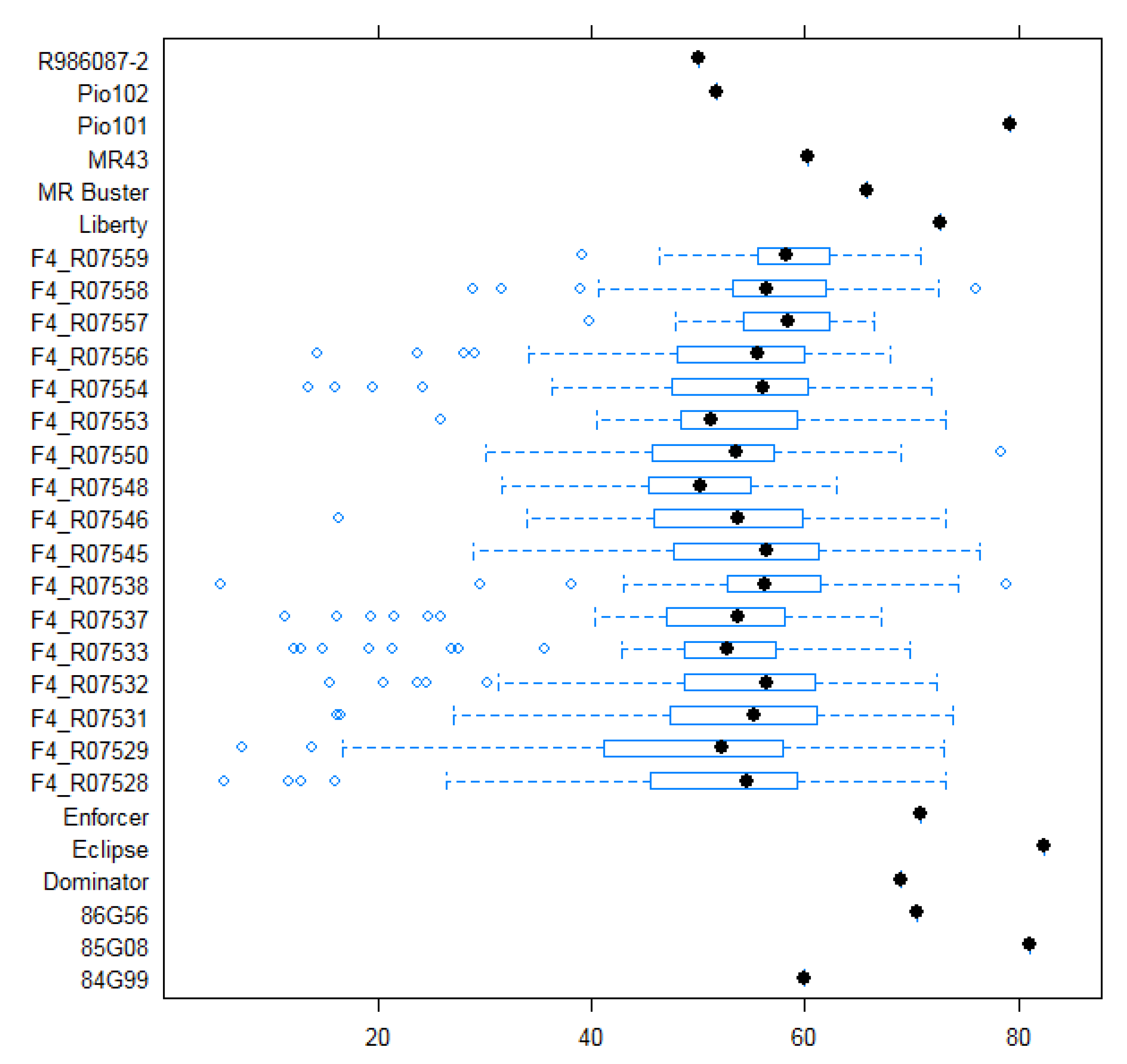
r2 = 0.78) with the estimates of green cover from the images. Using the ground cover data and experimental design, best linear unbiased predictors (BLUPs) were estimated for each genotype in a mixed effects statistical model that accounted for spatial trends in row and column directions. The trial included the hybrids that had been created using the F4 progeny from 17 diverse parents with
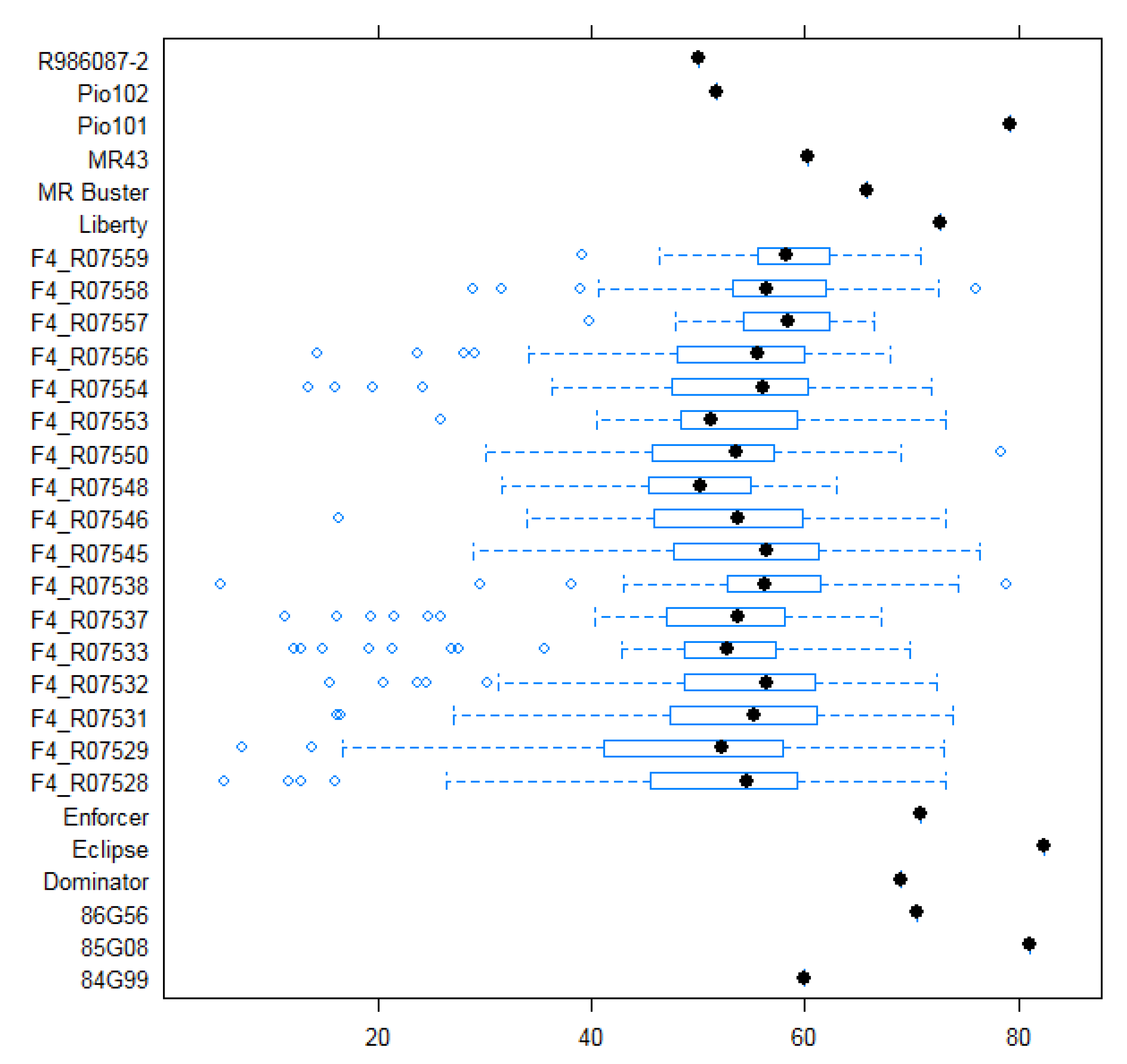
ca. 50 hybrids per parent.
Figure 5 shows boxplots of the BLUPs, which indicate the values of the commercial checks (single points) and the distribution of values for the multiple hybrids for each F4 cross-parent. While most commercial lines and checks had ground cover estimates of 60% or greater, the hybrids from the F4 progeny had a substantial range of green cover, with the mean of the progeny hybrids being less than the checks. However, within each F4 family, the breeder could identify one or more hybrids that had high ground cover based on the image analysis. These hybrids and their parent lines would be good candidates for future breeding for increased ground cover.
For trials of several 1000 plots, ground-based estimates by visual scores or with cameras may take many hours to collect, compared to the 10- to 15-min flights that are possible with a UAS platform. The first flight of the day takes about 15 min to setup, while turn-around flights take about 5 min. Alternative estimates include the types of FBP vehicle described by [
1] and others, as well as approaches that utilize laser detection of early biomass [
21], for example, or that deploy methods that use near infrared sensors to detect vegetation cover. In addition to the time and labour savings associated with aerial detection, this speed and altitude of the platform assists in dealing with issues of variation in sun conditions that affect the quality of photography and non-active near-infrared methods compared to conventional aircraft.
Figure 4.
Ground cover at six weeks after planting in a sorghum breeding trial at Warwick, December 21, 2011. (a) Four extracted plot images end trimmed at 10% and thresholded (to the right) to estimate green ground cover and (b) the correlation (r2 = 0.78) between the number of plants per plot and estimated green cover for 100 plots of the trial. Each ground cover point was averaged from at least two or, more commonly, three, images.
Figure 4.
Ground cover at six weeks after planting in a sorghum breeding trial at Warwick, December 21, 2011. (a) Four extracted plot images end trimmed at 10% and thresholded (to the right) to estimate green ground cover and (b) the correlation (r2 = 0.78) between the number of plants per plot and estimated green cover for 100 plots of the trial. Each ground cover point was averaged from at least two or, more commonly, three, images.
Figure 5.
The boxplots of the best linear unbiased predictors (BLUPs) of green cover from a trial of commercial sorghum genotypes and of multiple hybrids produced from the F4 progeny of 17 families (ca. 50 hybrids per F4 family), where the progeny were derived from separate crosses between R986087-2 and the 17 parental lines.
Figure 5.
The boxplots of the best linear unbiased predictors (BLUPs) of green cover from a trial of commercial sorghum genotypes and of multiple hybrids produced from the F4 progeny of 17 families (ca. 50 hybrids per F4 family), where the progeny were derived from separate crosses between R986087-2 and the 17 parental lines.
2.3. Canopy Temperature and Estimate of a Relative Transpiration Index in Sugarcane
Collaborators at Dalbeg (20.2° S, 147.3° E) in the Burdekin irrigation area in northern Queensland are undertaking research to compare the yield and sugar content of diverse sugarcane clones when grown in drought or non-drought conditions. Analyses of these clones include extensive monitoring of leaf-level conductance, as well as biomass sampling to characterise growth rates.
A trial at this site comprised three treatments (drought, no irrigation; semidr, half irrigation; irrig, full irrigation), where irrigation was supplied via furrows on the laser-levelled site. In each irrigation treatment, the same 40 clones, comprising commercial lines and diverse germplasm sources (designated by the prefix “CT”) were planted as single-bud setts in May, 2011. The plot sizes were four rows (6 m) wide by 10 m long with three blocks of 40 clones replicated in each treatment. While the drought treatment was rainfed only, the “semidr” and “irrig” crops had been irrigated the week before measurement, with the irrigated treatment being watered at least once every three weeks from planting, depending on the rainfall received. On November 28–29, 2011, flights were made over the trial with the Ricoh cameras and the Miricle thermal camera on-board. At that time, the thermal camera had not been calibrated against canopy temperature. Ground measurements showed canopy temperatures of 30 to 38 °C on the day, as recorded by a hand-held IR thermometer (Mikron IN15+, IMPAC Infrared GmbH, Frankfurt [
22]). A relative temperature index was computed from images similar to that in
Experimental Section. The range of the thermal index was derived after masking out the hot soil and dead leaves (>
ca. 50 °C) from the images. For each pixel, the index is computed as the pixel value divided by the difference between the maximum and the minimum pixel values for the masked image.
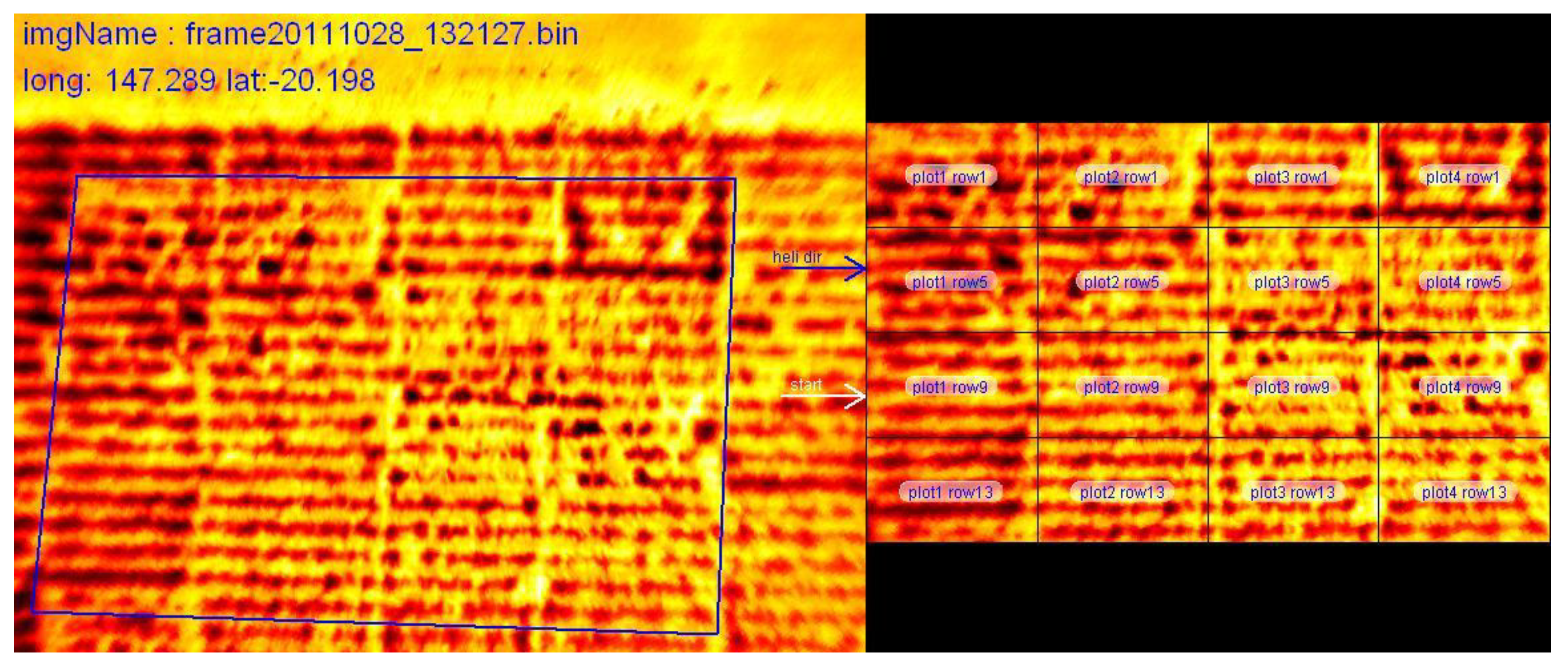
For each trimmed and thresholded image of a plot, the values of the masked pixels were averaged to determine the thermal index, and the ratio of masked pixels to total pixels was used as an estimate of green ground cover (
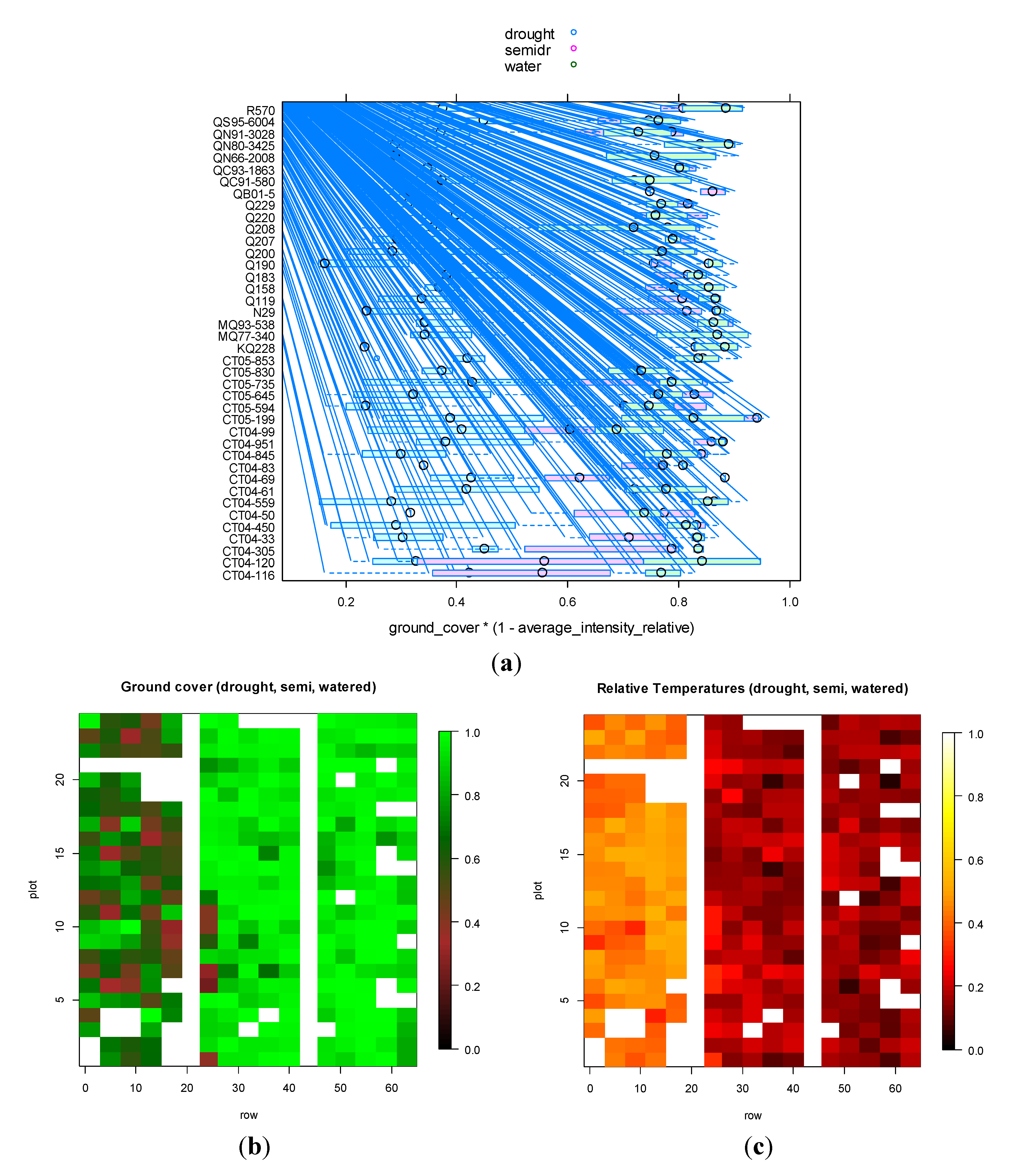
Figure 6). As an approximation of the relative transpiration index of each plot, the ground cover was multiplied by (1 – the relative thermal index), given that higher temperatures are associated with lower transpiration rates. On this scale, the clones ranged in mean value between 0.2 and 0.45 in the drought treatment, with the lowest value being recorded for the clone Q190, which is a clone selected for performance in irrigated environments.
In general, there was little obvious variation among clones within either the drought or irrigated environments. However, in the semidr (partially irrigated environment), the unselected “CT” clones had greater variability in response when compared to the commercial clones, with at least six of the CT clones having substantially lower values in the semidr compared to the irrigated treatment. Commercial clones were not significantly different in their values for these two treatments.
2.4. Quantifying Crop Lodging in Wheat
In high yielding irrigated conditions, lodging is a major cause of yield loss, due both to premature senescence of the canopy and due to weathering of grain, especially in wet conditions. Wheat crops rarely lodge before stem elongation, a stage about halfway to flowering, but may lodge and sometimes “stand up” again on multiple occasions from this stage through to maturity. The date and extent of lodging are important considerations in the evaluation of the suitability of wheat varieties for high-input conditions, and breeders select against wheat genotypes that are susceptible to lodging.
Figure 6.
(
a) Approximation of the potential transpiration index for 40 clones of sugarcane in three different drought treatments (drought, semi-drought and irrigated) based on green leaf cover and relative crop temperature, as determined from images similar to that in
Figure 4. Missing columns are “filler”, and missing plots had poor establishment or pigweed infestation and were eliminated based on inspection of the images. The upper figures are heatmaps of (
b) the thresholded green cover estimates and (
c) the relative crop temperature. Images were taken at 60 m of elevation on November 28, 2011, when the crop had just passed six months of age.
Figure 6.
(
a) Approximation of the potential transpiration index for 40 clones of sugarcane in three different drought treatments (drought, semi-drought and irrigated) based on green leaf cover and relative crop temperature, as determined from images similar to that in
Figure 4. Missing columns are “filler”, and missing plots had poor establishment or pigweed infestation and were eliminated based on inspection of the images. The upper figures are heatmaps of (
b) the thresholded green cover estimates and (
c) the relative crop temperature. Images were taken at 60 m of elevation on November 28, 2011, when the crop had just passed six months of age.
As part of an ongoing research program, an irrigated wheat trial (designated as 12GEHEAT-1) comprising 45 varieties in two replicates of 2 m-wide by 7 m-long plots, was sown on May 24, 2012, at the CSIRO research station near Gatton in southern Queensland (27.55° S, 152.34° E). The trial was subject to multiple lodging events after flowering. A flight made on September 28, 2012, while carrying two RICOH cameras (visual and NIR (red-edge) filtered, see the
Experimental Section) enabled the visualization of the impact of some of the first lodging events that accompanied strong south-westerly winds of 30 to 40 km h
−1 that were recorded by the adjacent weather station on September 21, 2012.
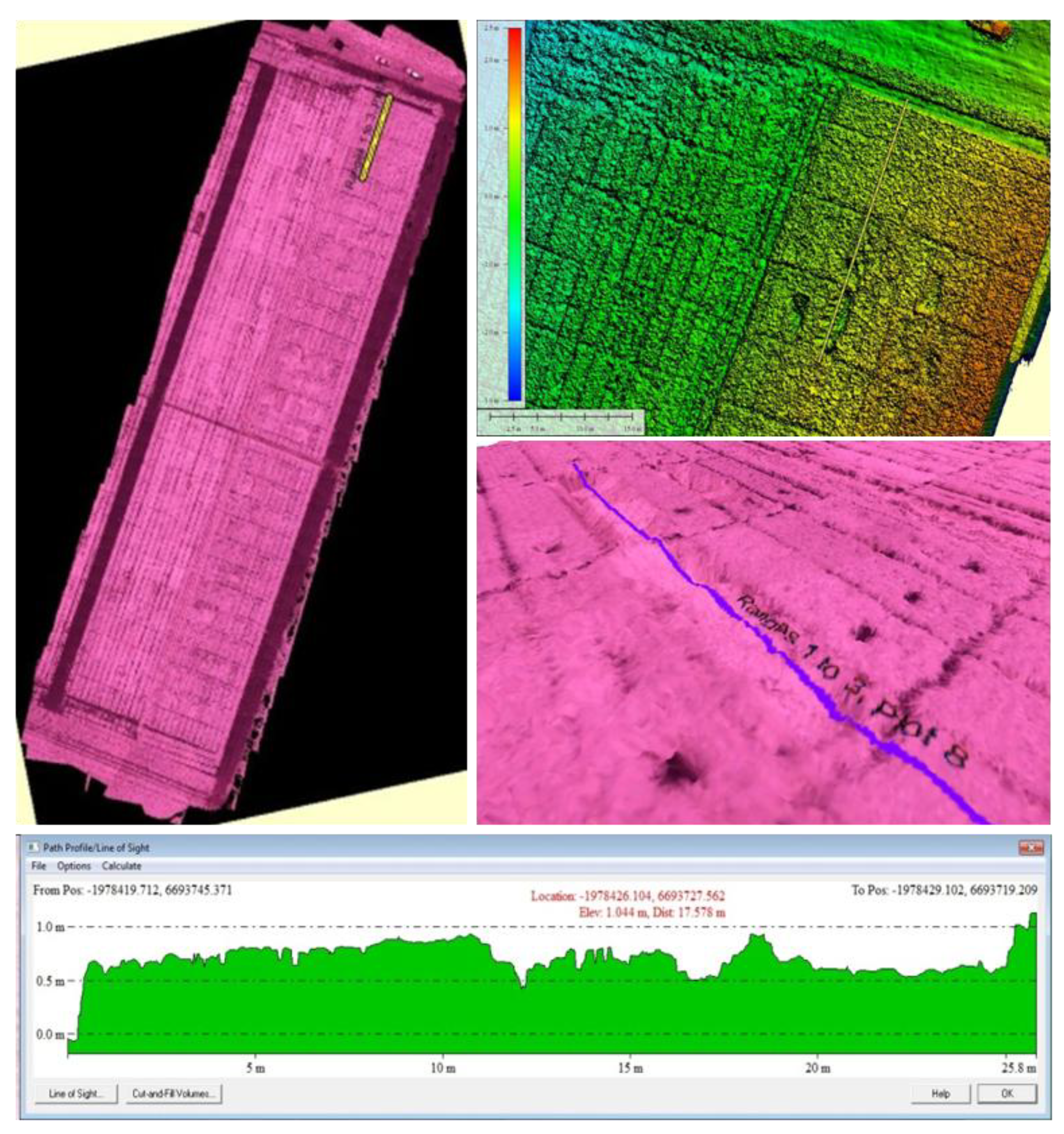
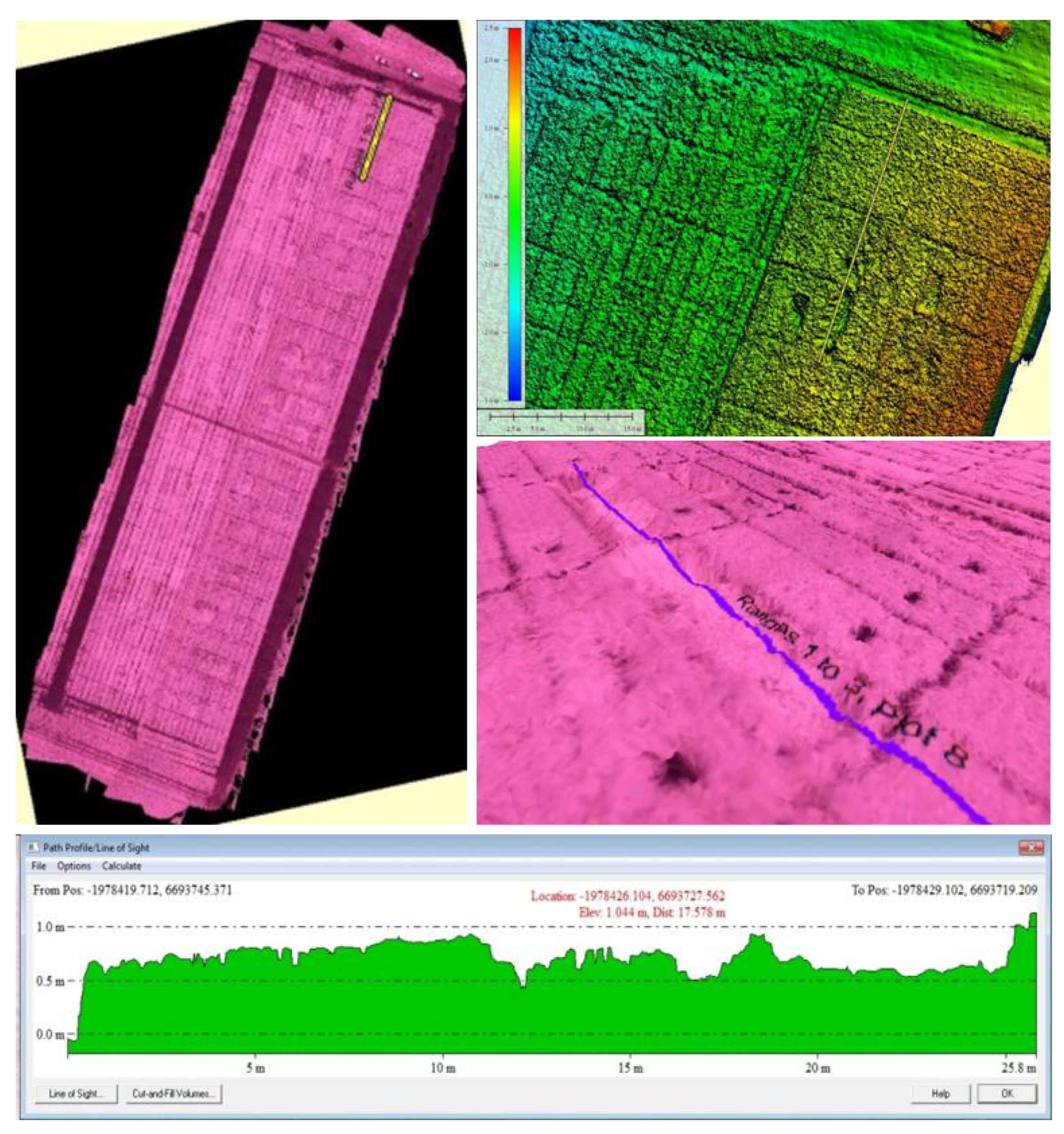
The JPG images from the NIR (red-edge) filtered camera were annotated using EXIF, a public domain software, to add metadata from the flight log, including latitude, longitude and elevation, in addition to the metadata that was stored by the cameras related to focal length, white balance setting, shutter speed and exposure. The images were submitted to the commercial “DroneMapper” service (see Materials and Methods) for processing into an ortho-mosaic and a three-dimensional point-cloud digital elevation model that is shown in polygon format in
Figure 7. This model can be analysed by various tools to extract the height in an image from any x, y position, as indicated by an example transect in
Figure 7. The mosaic was then processed by the Pheno-Copter R library to extract estimated heights for all 90 plots in the 12GEHEAT1 trial.
Figure 7.
From an ortho-mosaic of NIR (red-edge) images (top left), the generated digital elevation model of wheat at about two weeks after average flowering time (top right) with a transect highlighted. A 3D view of the height transect through partially lodged plots is shown on a close-up of the DEM draped with the near-infrared ortho-mosaic (middle right), which allows the estimation of canopy height across three and a half 7-m plots (bottom). The dark squares in the near-infrared image are where sample quadrats were cut at anthesis.
Figure 7.
From an ortho-mosaic of NIR (red-edge) images (top left), the generated digital elevation model of wheat at about two weeks after average flowering time (top right) with a transect highlighted. A 3D view of the height transect through partially lodged plots is shown on a close-up of the DEM draped with the near-infrared ortho-mosaic (middle right), which allows the estimation of canopy height across three and a half 7-m plots (bottom). The dark squares in the near-infrared image are where sample quadrats were cut at anthesis.
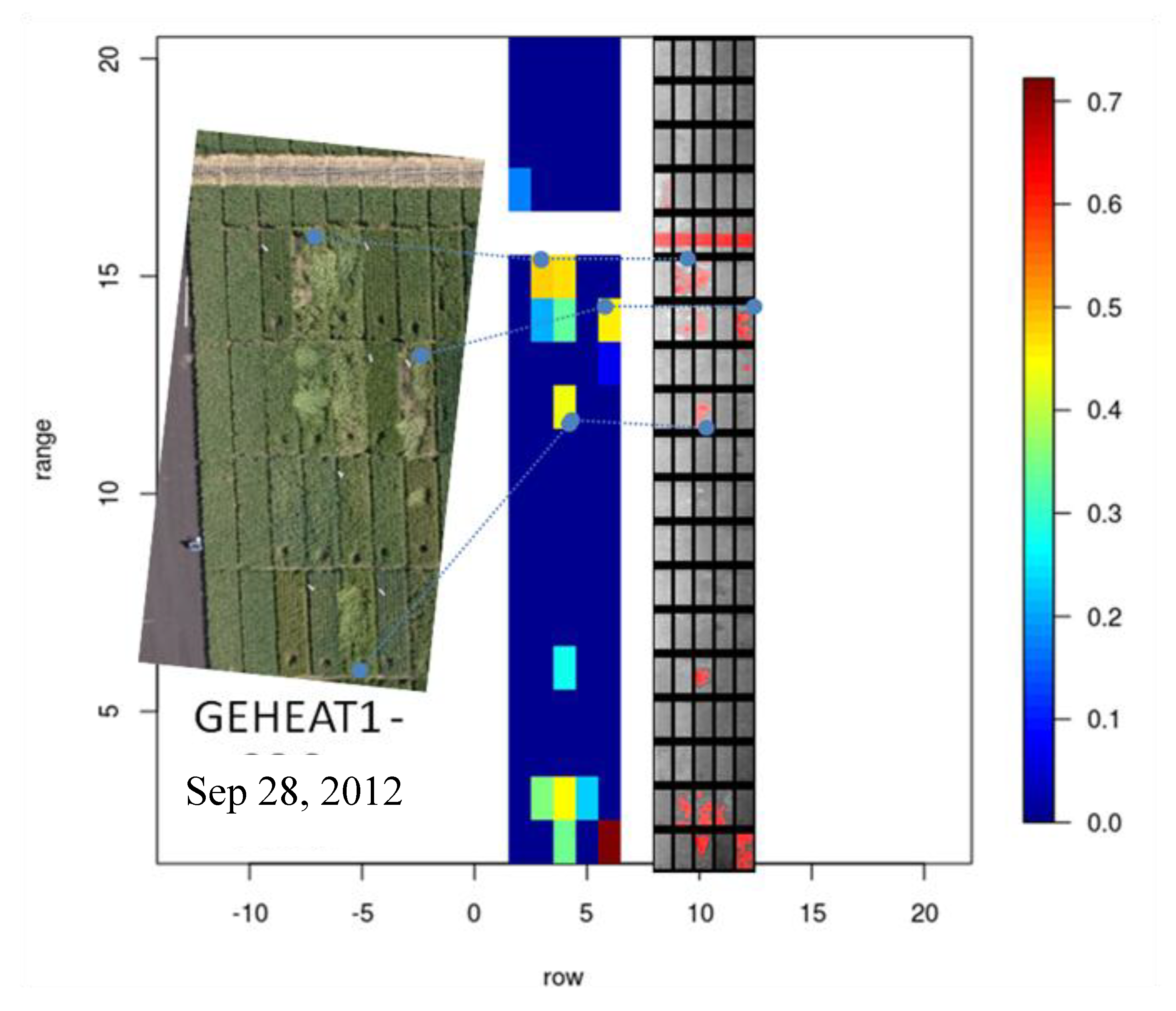
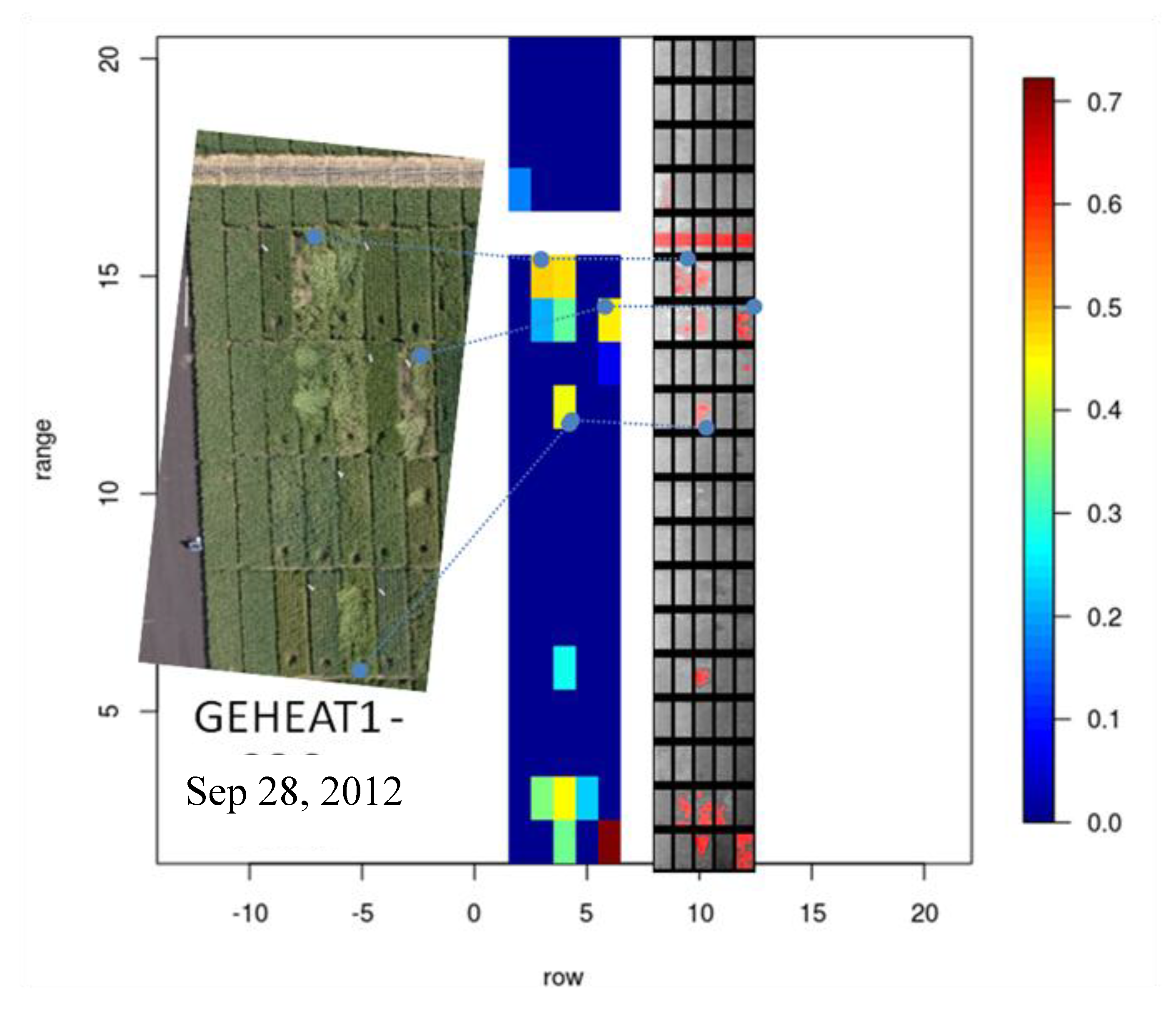
To determine lodging, the variance was determined among pixel heights within each plot. By inspection of the images with the greatest variance, a height threshold (
ca. 50 cm) was set in order to identify the lodged proportion of plots and the average height of lodged and standing fractions of the plots. For the date observed, the proportion of lodging was estimated in a range of 10% to 70% across the plots (
Figure 8) and was able to be verified by inspection of the images and by visual scores done at the same time as the flight.
Figure 8.
Spatial layout (range and row) of a wheat variety trial showing the proportion of lodging (zero to one, coloured) by area for each plot. The proportion of lodging was estimated as the proportion of pixels within each plot that were deemed to be lodged. The right-hand false-colour image of crop height estimated from the DEM (
Figure 8) shows the pixels (red) that had been deemed to be lodged based on their (low) estimated height within plots that had extreme variance. A single visual image of the upper part of the trial (
left) is shown for comparison to the quantitative analysis, with example plots, from an irrigated wheat trial designated as 12GEHEAT-1, linked by blue lines across the three representations.
Figure 8.
Spatial layout (range and row) of a wheat variety trial showing the proportion of lodging (zero to one, coloured) by area for each plot. The proportion of lodging was estimated as the proportion of pixels within each plot that were deemed to be lodged. The right-hand false-colour image of crop height estimated from the DEM (
Figure 8) shows the pixels (red) that had been deemed to be lodged based on their (low) estimated height within plots that had extreme variance. A single visual image of the upper part of the trial (
left) is shown for comparison to the quantitative analysis, with example plots, from an irrigated wheat trial designated as 12GEHEAT-1, linked by blue lines across the three representations.
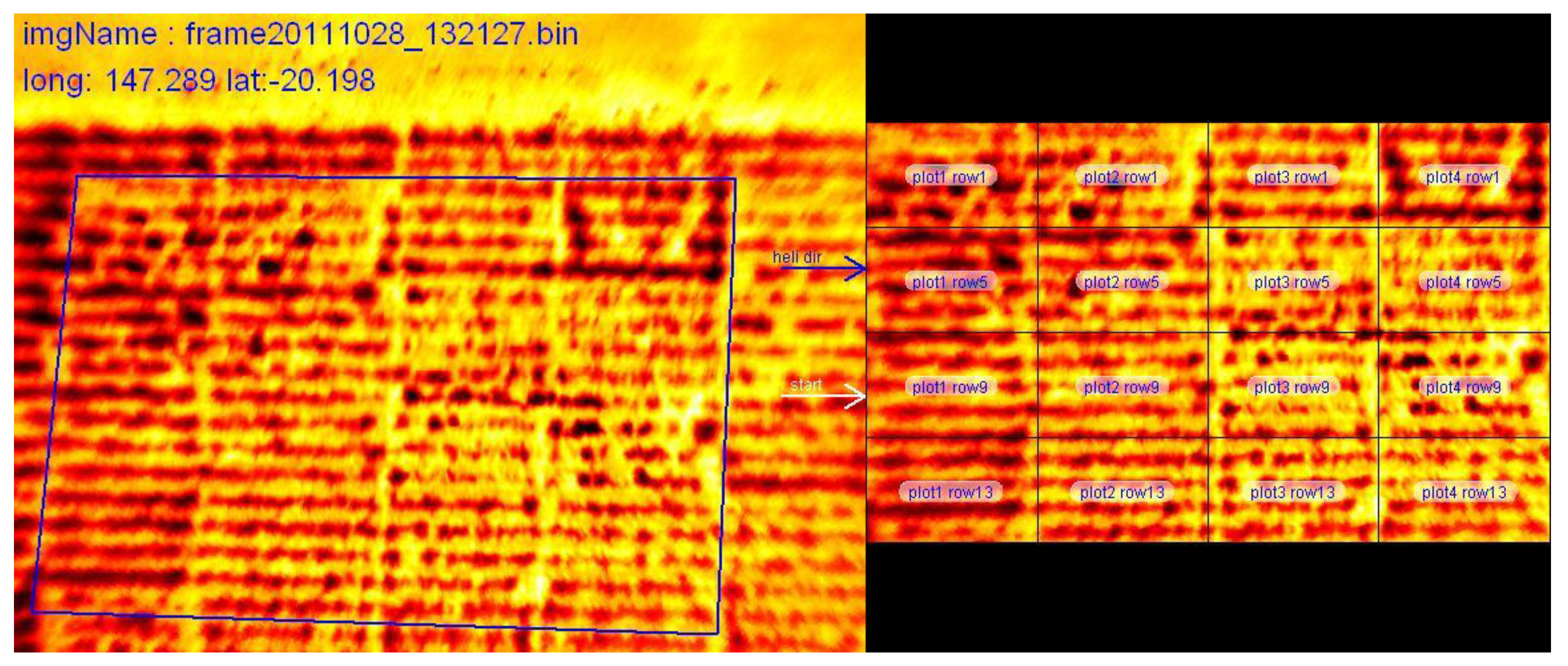
2.5. Combined Image Representations
Once the images have been extracted, they are typically trimmed by a similar amount (default 10%) to remove edge effects due to the wheel tracks between plots and due to walking alleys at the top and bottom of plots. Whether extracted from single images or from mosaics, these extracted images can be laid out in the original plot design for visual interpretation to assist quantitative analysis.
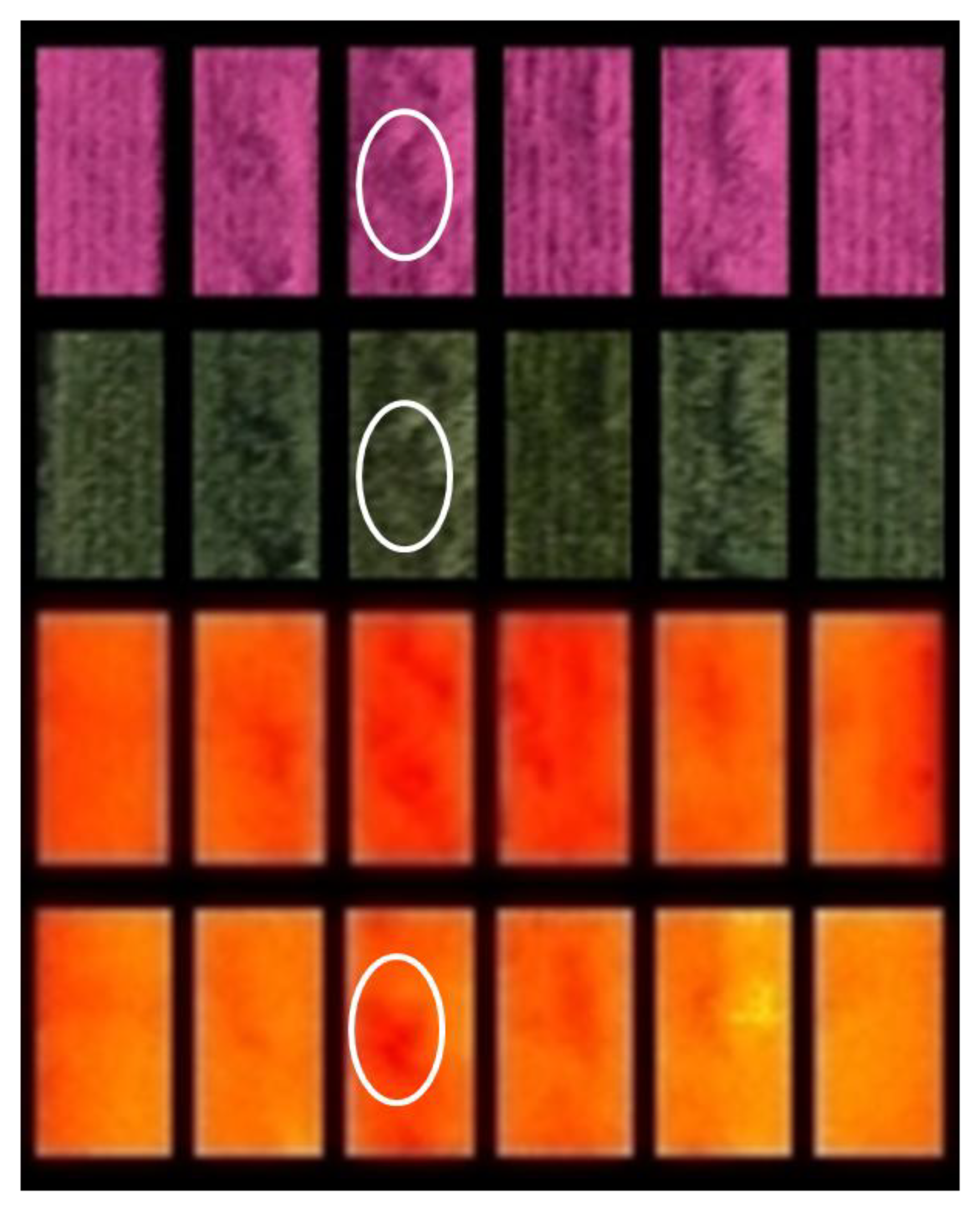
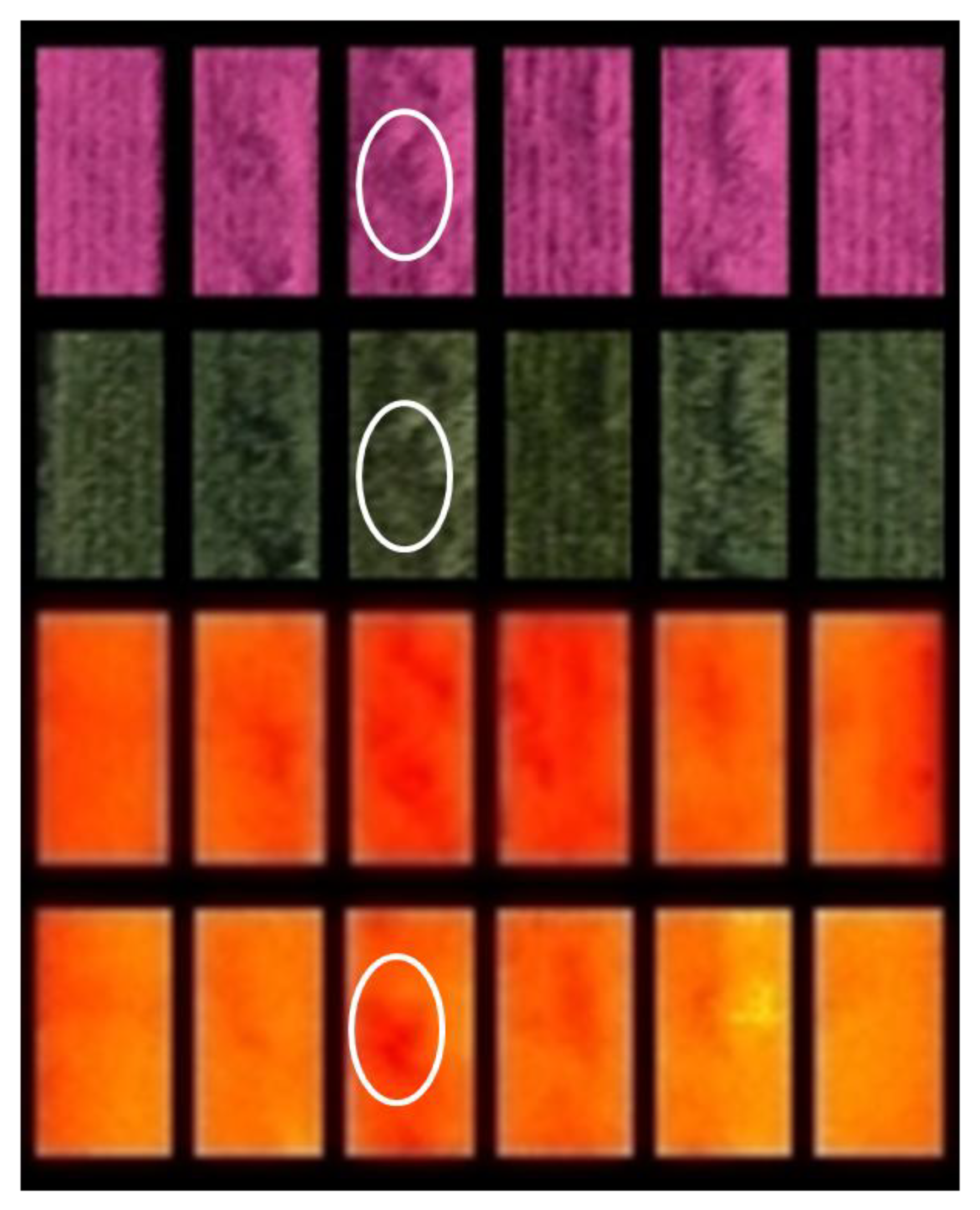
Figure 9 shows an example for another wheat trial grown at Gatton in 2011, on which multiple flights (up to 10 on one day) were done every two to three weeks during the season. This irrigated wheat trial had partially lodged about 2 weeks before the flight date in
Figure 9. The NIR (red-edge) filtered image, which highlights vegetative material, shows the lodged areas more clearly than does the standard RGB image. At 11:00 h, the lodged areas of the plots were generally hotter than the non-lodged areas. By 15:05 h, the plots had started to cool, but lodged areas indicated by the oval shape were still hotter than the remainder of the plot.
Figure 9.
Comparison of trimmed images for six adjacent plots of a wheat trial from flights made on November 14, 2011, from 60m of elevation at about one week after flowering time. The top three images (NIR (red-edge) filtered, RGB and false-colour thermal (yellow = cooler; red = hotter)) were taken at 11:00 h, while the bottom thermal image was taken at 15:05 h. The white ovals indicate a lodged area of the third plot (lodging is also evident in Plots 2, 4 and 5).
Figure 9.
Comparison of trimmed images for six adjacent plots of a wheat trial from flights made on November 14, 2011, from 60m of elevation at about one week after flowering time. The top three images (NIR (red-edge) filtered, RGB and false-colour thermal (yellow = cooler; red = hotter)) were taken at 11:00 h, while the bottom thermal image was taken at 15:05 h. The white ovals indicate a lodged area of the third plot (lodging is also evident in Plots 2, 4 and 5).
The generation of an ortho-mosaic and DEM requires high resolution images with substantial overlap in order to detect control points that will link the images. Most current thermal cameras have a maximum resolution of 640 × 480 and would require low flights (20 m or so) with high coverage to obtain sufficient coverage. At present, we are working on ways to project and link the thermal images onto DEMs generated by the higher resolution cameras. This would allow high-quality masking from those images to be transferred to thermal images, e.g., for estimation of the thermal effects associated with lodging events or with canopy height, per se, which has been shown to be genetically associated with effects on canopy temperature [
23].


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}