Hysteresis Compensation and Sliding Mode Control with Perturbation Estimation for Piezoelectric Actuators



Abstract
:1. Introduction
2. Dynamic Modeling and Parameters Identification
2.1. Dynamic Modeling
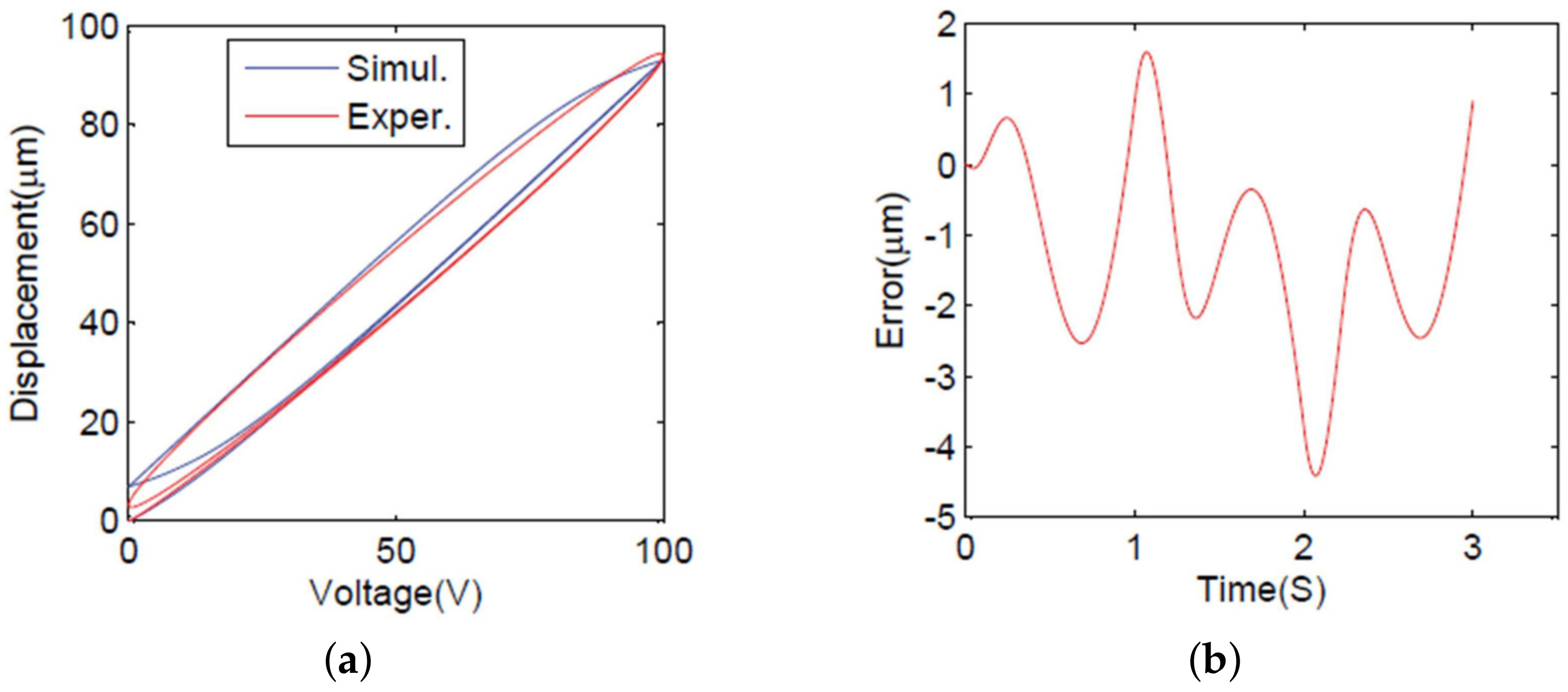
2.2. Parameter Identification
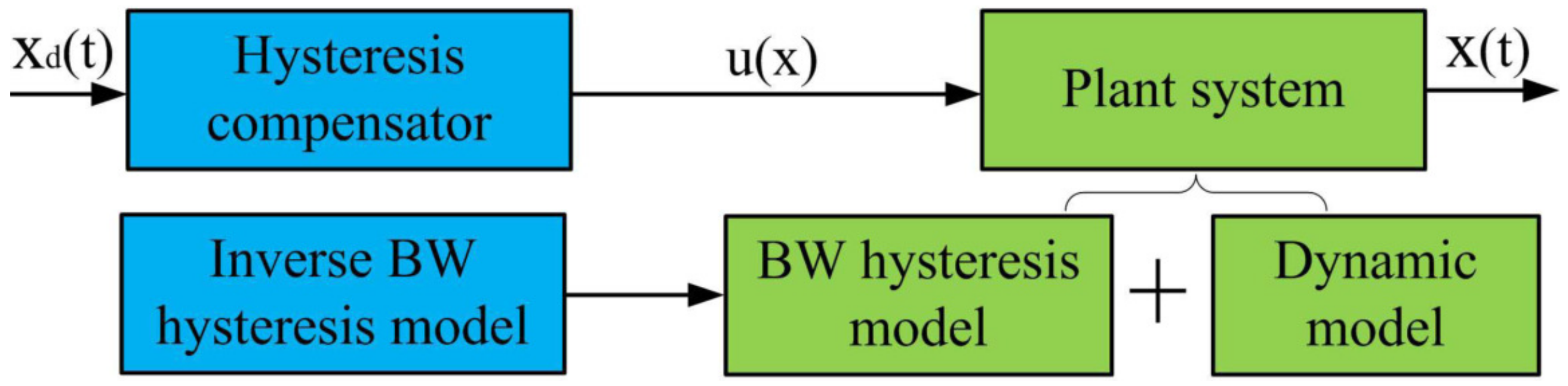
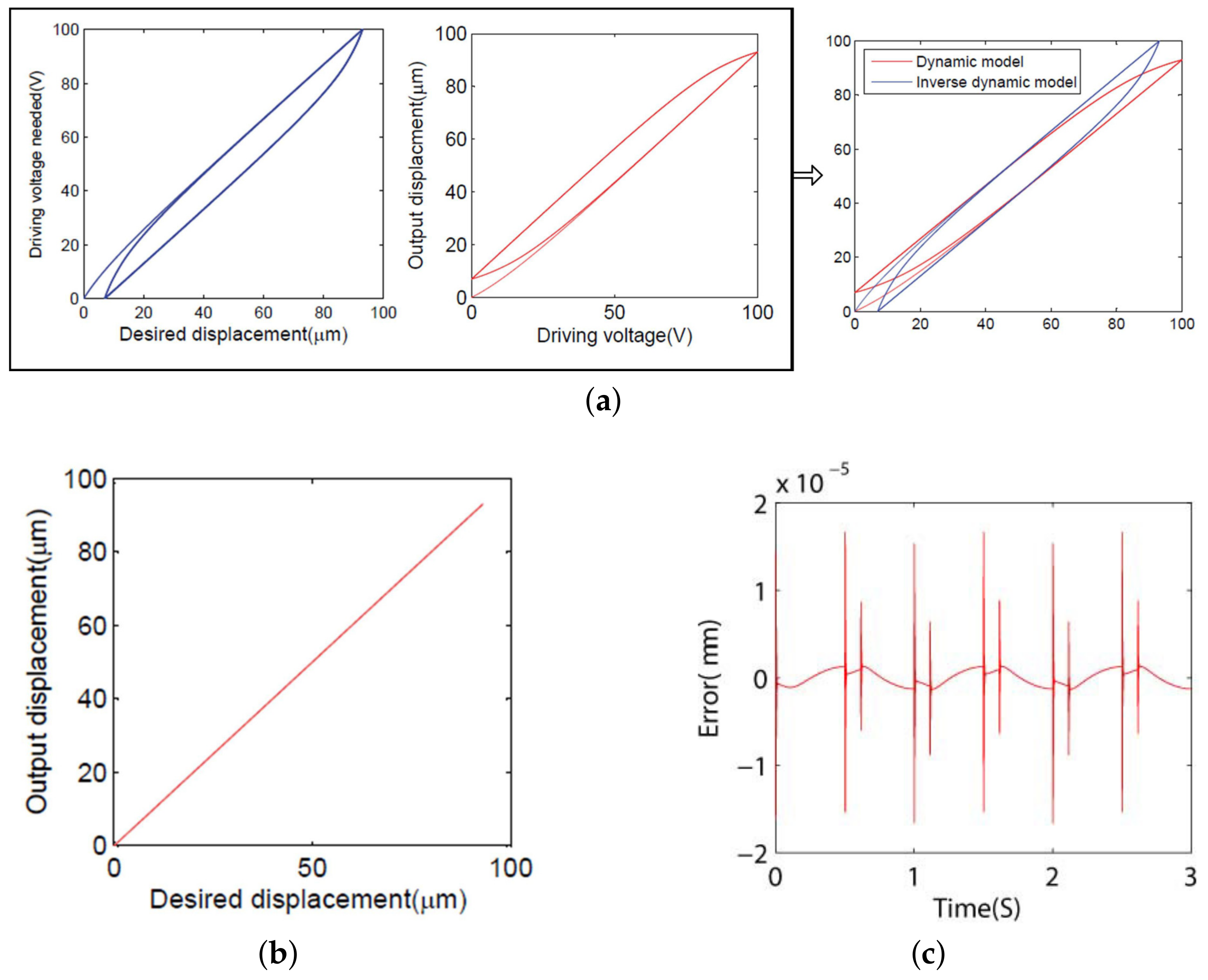
3. Hysteresis Compensation Based on the Inverse BW Model
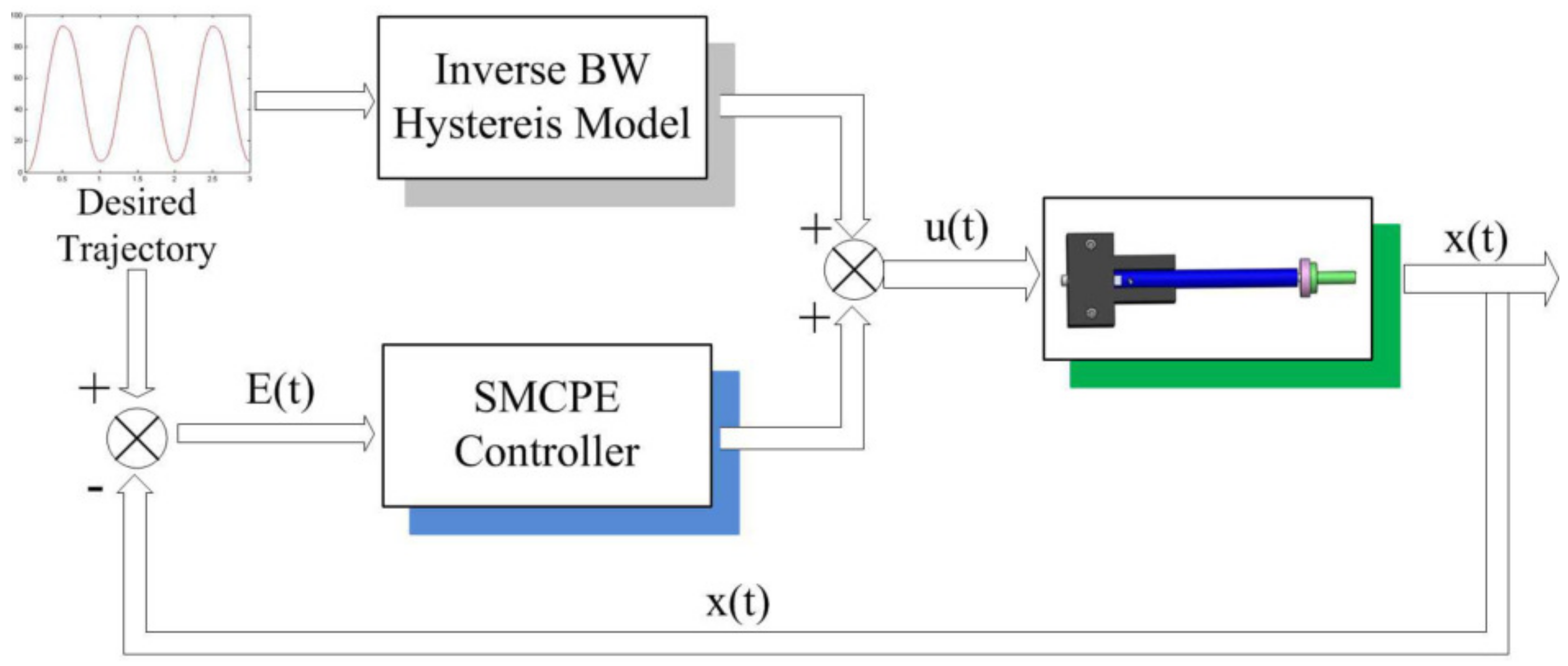
4. The SMCPE Controller Coupled with Hysteresis Compensator
4.1. The Perturbation Estimation Technique
4.2. System Description
4.3. Sliding Mode Controller Design
4.4. Stability Analysis
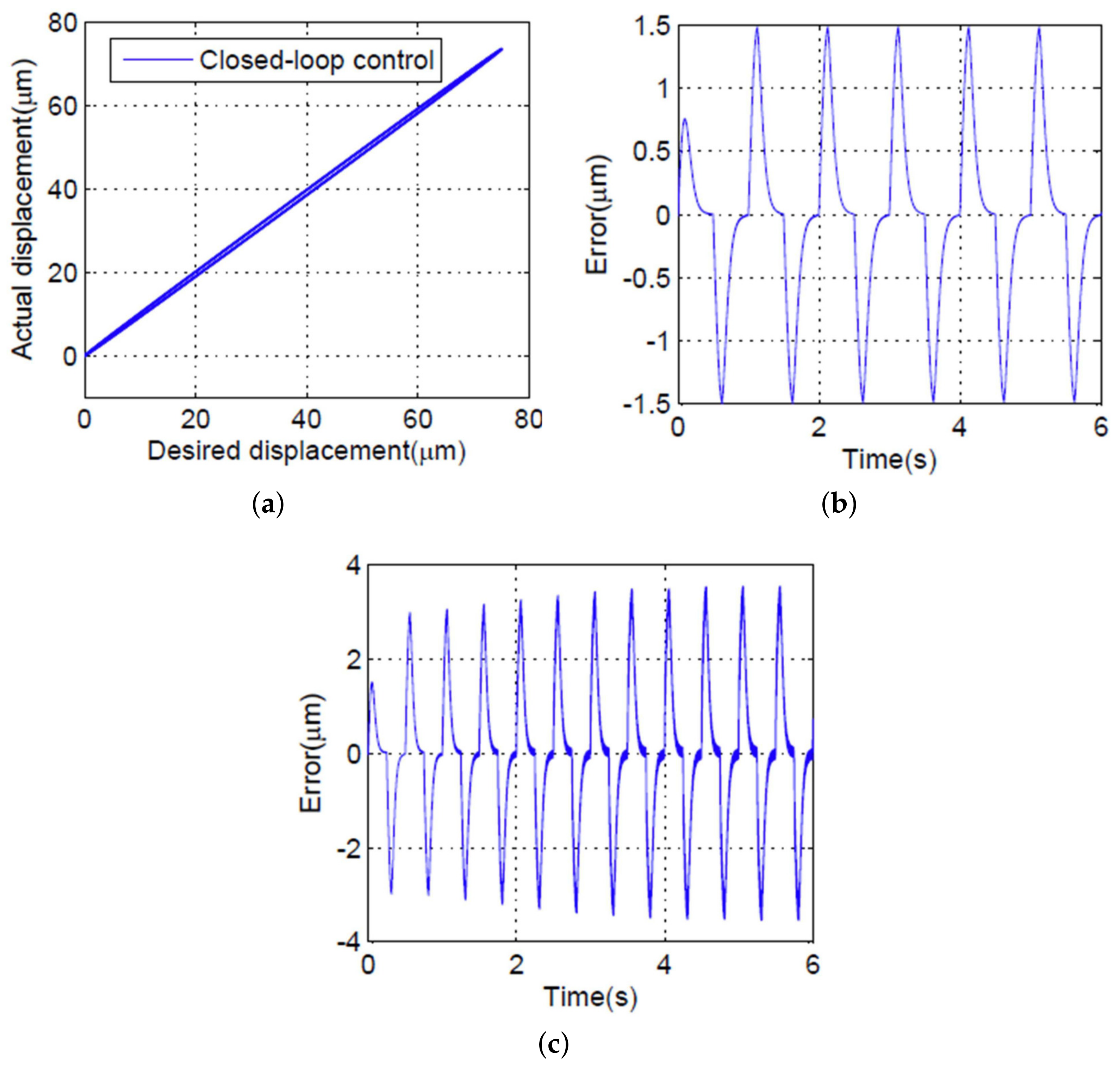
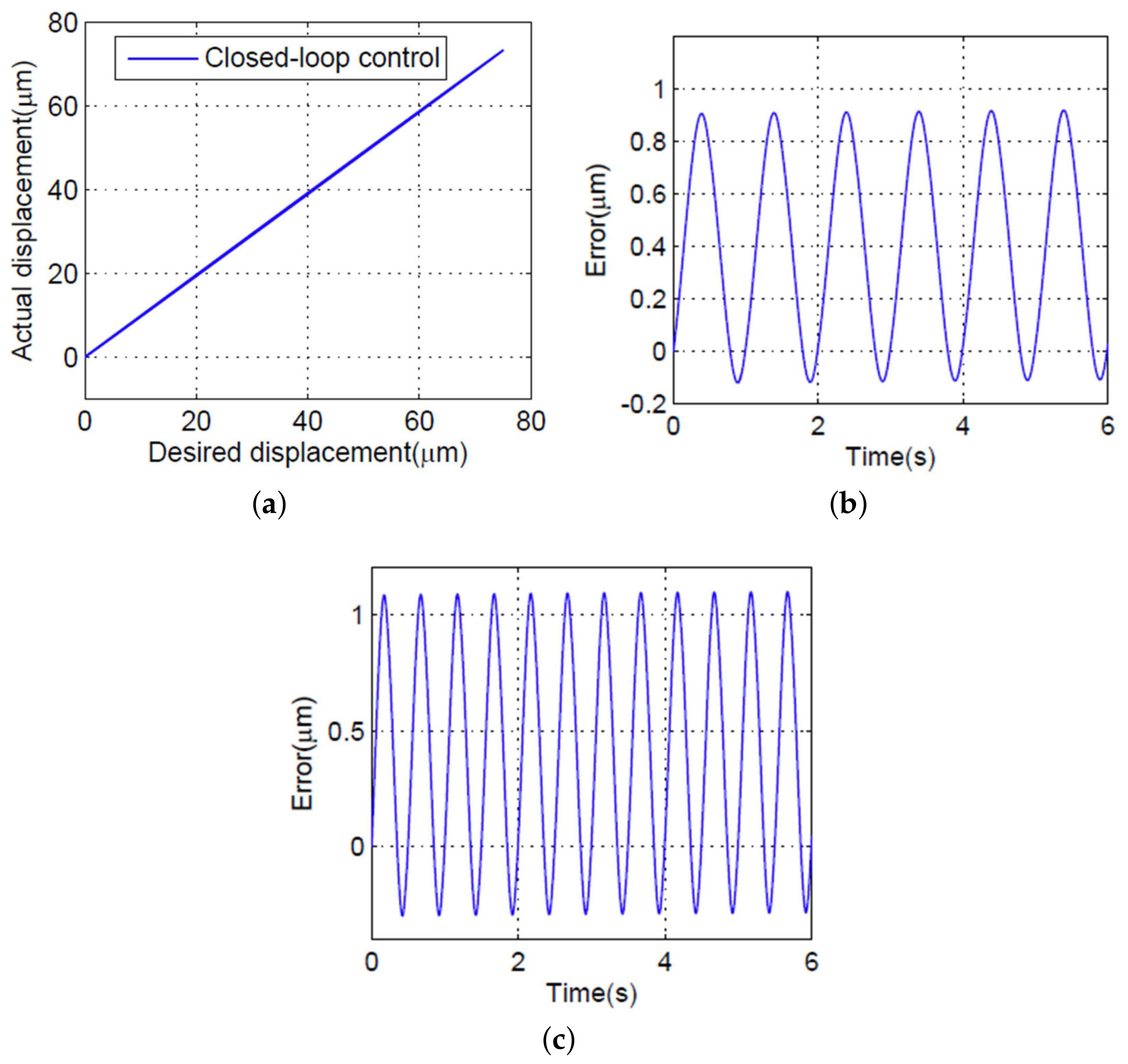
5. Performance Validation and Discussion
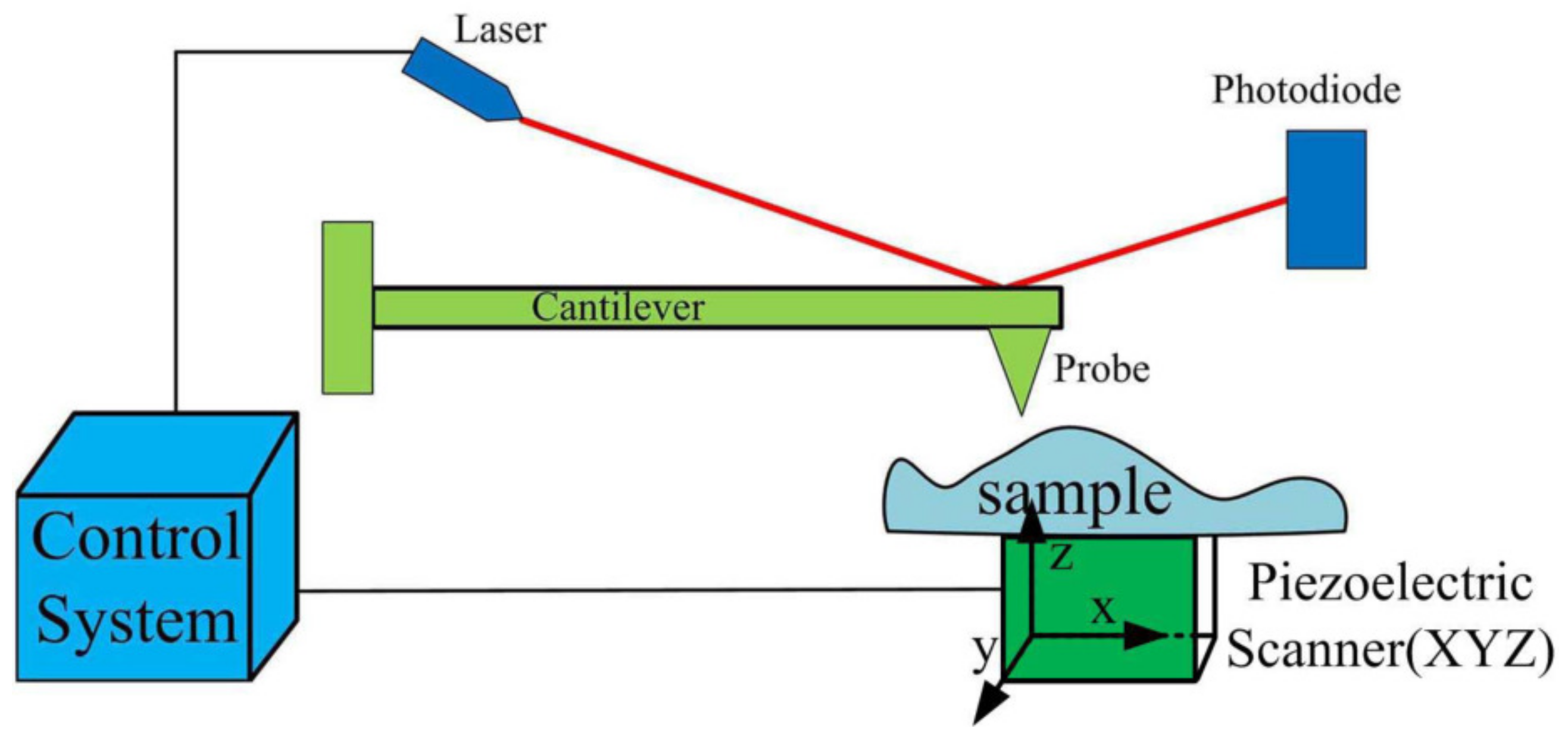
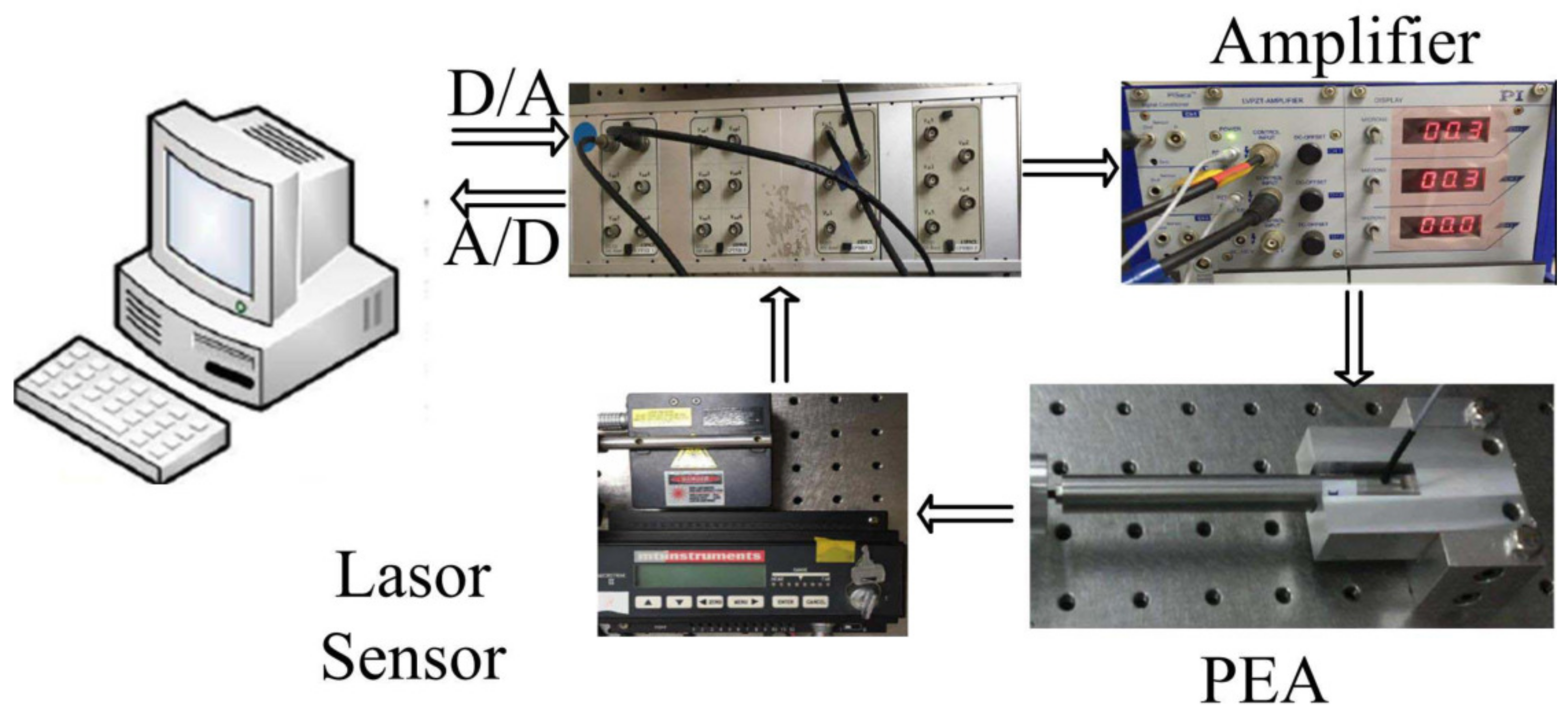
5.1. Experimental Setup Configuration
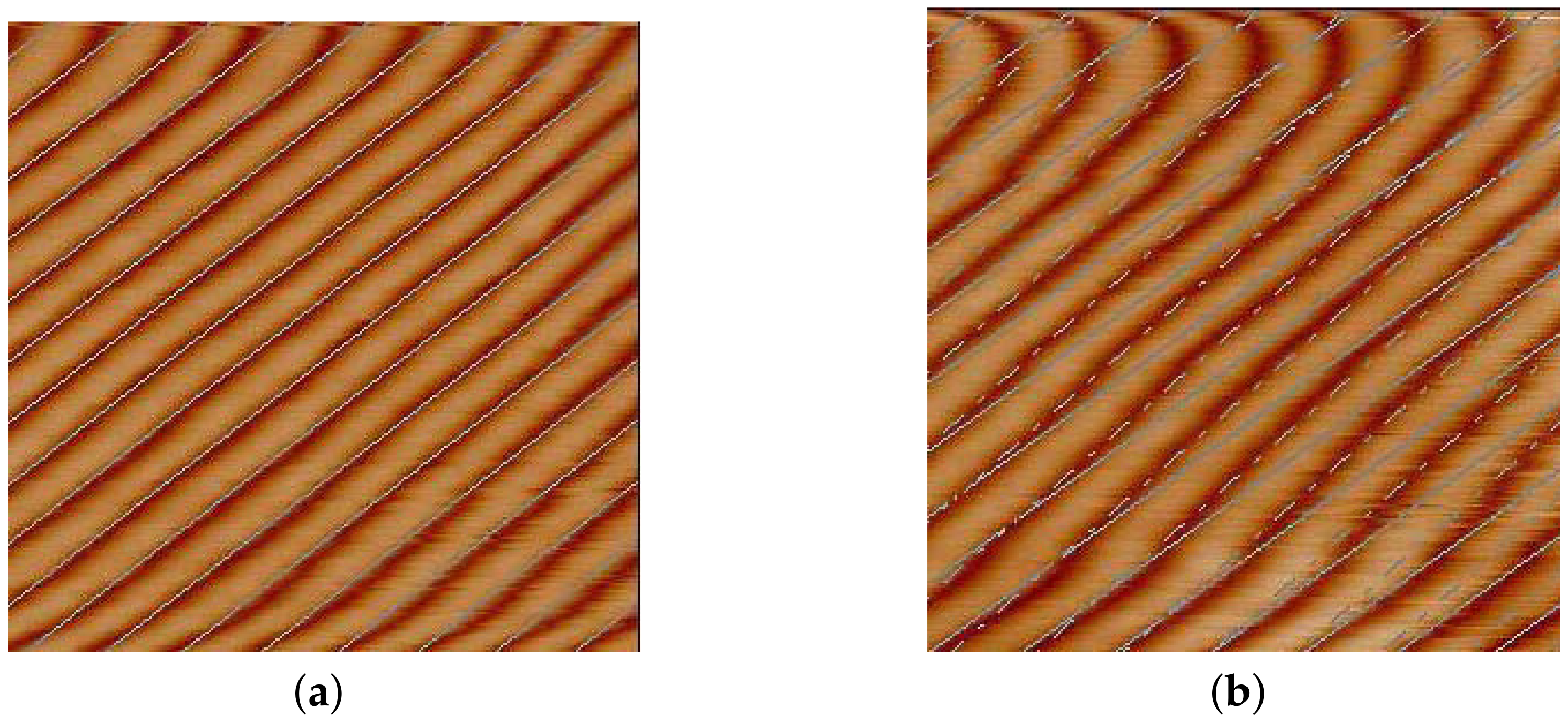
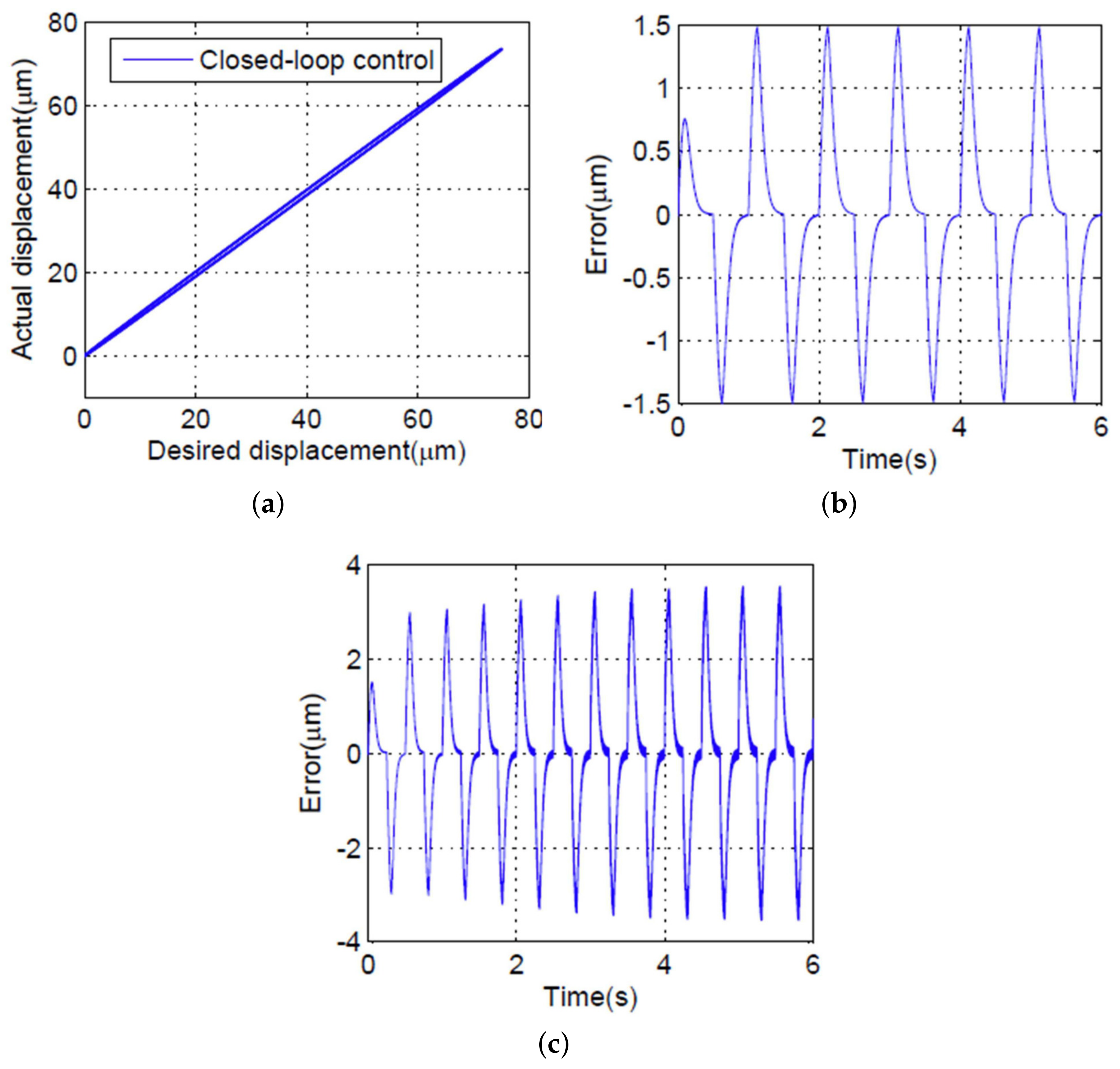
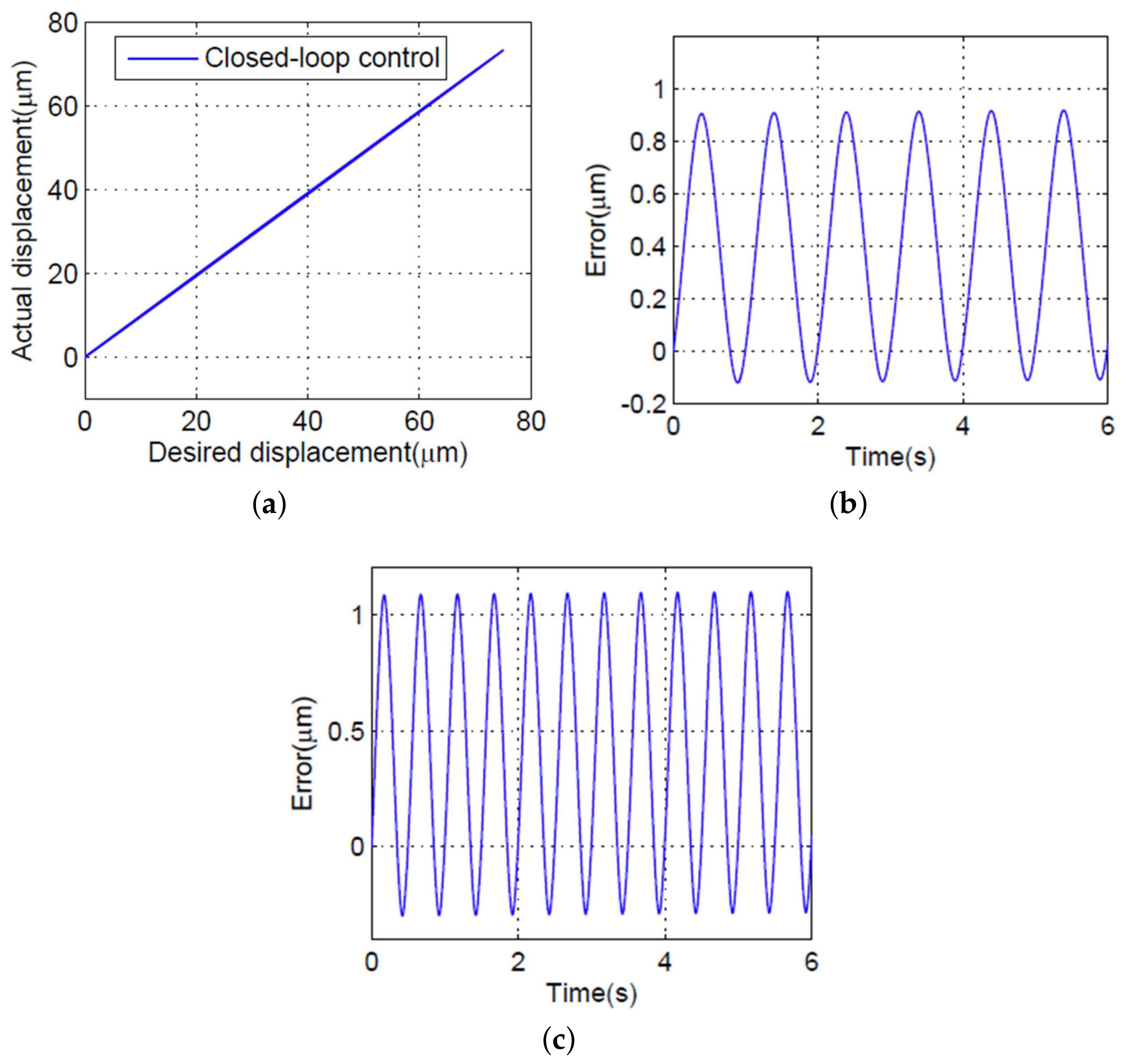
5.2. Experimental Results and Discussion
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Mironov, V.L. Fundamentals of Scanning Probe Microscopy; NT-MDT; Institute for Physics of Microstructures, Russian Academy of Sciences: Nizhnii Novgorod, Russia, 2004. [Google Scholar]
- Giessibl, F.J. Advances in atomic force microscopy. Rev. Mod. Phys. 2003, 75, 949–983. [Google Scholar] [CrossRef]
- Eaton, P.; West, P. Atomic Force Microscopy; Oxford University Press: Oxford, UK, 2010. [Google Scholar]
- Devasia, S.; Eleftheriou, E.; Moheimani, S.O.R. A survey of control issues in nanopositioning. IEEE Trans. Cont. Syst. Technol. 2007, 15, 802–823. [Google Scholar] [CrossRef]
- Dagdeviren, C.; Joe, P.; Tuzman, O.L.; Park, K.; Lee, K.J.; Shi, Y.; Huang, Y.; Rogers, J.A. Recent progress in flexible and stretchable piezoelectric devices for mechanical energy harvesting, sensing and actuation. Extreme Mech. Lett. 2016, 9, 269–281. [Google Scholar] [CrossRef]
- Lin, C.-J.; Yang, S.-R. Precise positioning of piezo-actuated stages using hysteresis-observer based control. Mechatronics 2006, 16, 417–426. [Google Scholar] [CrossRef]
- Croft, D.; Shed, G.; Devasia, S. Creep, Hysteresis, and vibration compensation for piezoactuators: Atomic force microscopy application. J. Dyn. Systs. Meas. Control 1999, 123, 35–43. [Google Scholar] [CrossRef]
- Yi, K.A.; Veillette, R.J. A charge controller for linear operation of a piezoelectric stack actuator. IEEE Trans. Control Syst. Technol. 2005, 13, 517–526. [Google Scholar] [CrossRef]
- Sofla, M.S.; Barazandeh, F.; Rezaei, S.M.; Zareinejad, M.; Saadat, M. Observer-based robust motion control of a piezo-actuated stage under external disturbances. Trans. Inst. Meas. Control 2011, 34, 365–375. [Google Scholar] [CrossRef]
- Oh, J.H.; Bernstein, D.S. Piecewise linear identification for the rate-independent and rate-dependent Duhem hysteresis models. IEEE Trans. Autom. Control 2007, 52, 576–582. [Google Scholar] [CrossRef]
- Zhu, W.; Rui, X.T. Hysteresis modeling and displacement control of piezoelectric actuators with the frequency-dependent behavior using a generalized Bouc–Wen model. Precsi. Eng. 2016, 43, 299–307. [Google Scholar] [CrossRef]
- Huang, Y.C.; Lin, D.Y. Ultra-fine tracking control on piezoelectric actuated motion stage using piezoelectric hysteretic model. Asian J. Control 2004, 6, 208–216. [Google Scholar] [CrossRef]
- Qin, Y.D.; Zhao, X.; Zhou, L. Modeling and identification of the rate-dependent hysteresis of piezoelectric actuator using a modified prandtl-ishlinskii model. Micromachines 2017, 8, 114. [Google Scholar] [CrossRef]
- Xiao, S.L.; Li, Y.M. Dynamic compensation and H∞ control for piezoelectric actuators based on inverse Bouc–Wen model. Robot. Comput.-Integr. Manuf. 2014, 30, 47–54. [Google Scholar] [CrossRef]
- Ortiz, G.A.; Alvarez, D.A.; Bedoya, R.D. Identification of Bouc–Wen type models using multi-objective optimization algorithms. Comput. Struct. 2013, 114, 121–132. [Google Scholar] [CrossRef]
- Chen, X.; Li, Y.M. A modified PSO structure resulting in high exploration ability with convergence guaranteed. IEEE Trans. Syst. Man Cybern. Part B 2007, 37, 1271–1289. [Google Scholar] [CrossRef]
- Liang, J.J.; Qin, A.K.; Suganthan, P.N.; Baskar, S. Comprehensive learning particle swarm optimizer for global optimization of multimodal functions. IEEE Trans. Evol. Comput. 2006, 10, 281–295. [Google Scholar] [CrossRef]
- Ha, J.L.; Kung, Y.S.; Fung, R.F.; Hsien, S.C. A comparison of fitness functions for the identification of a piezoelectric hysteretic actuator based on the real-coded genetic algorithm. Sens. Actuator A-Phys. 2006, 132, 643–650. [Google Scholar] [CrossRef]
- Ding, B.X.; Li, Y.M.; Xiao, X.; Tang, Y.R. Optimized PID tracking control for piezoelectric actuators based on the Bouc–Wen Model. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; pp. 1576–1581. [Google Scholar]
- Elmali, H.; Olgac, N. Implementation of sliding mode control with perturbation estimation (SMCPE). IEEE Trans. Control Syst. Technol. 1996, 4, 79–85. [Google Scholar] [CrossRef]
- Bashash, S.; Jalili, N. Robust multiple frequency trajectory tracking control of piezoelectrically driven micro/nanopositioning systems. IEEE Trans. Control Syst. Technol. 2007, 15, 867–878. [Google Scholar] [CrossRef]
- Ghanimi, A.A.; Zheng, J.C.; Man, Z.H. Robust and fast non-singular terminal sliding mode control for piezoelectric actuators. IET Control Theory Appl. 2015, 9, 2678–2687. [Google Scholar] [CrossRef]
- Ghafarirad, H.; Rezaei, S.M.; Abdullah, A.; Zareinejad, M.; Saadat, M. Observer-based sliding mode control with adaptive perturbation estimation for micropositioning actuators. Precis. Eng. 2011, 35, 271–281. [Google Scholar] [CrossRef]
- Liaw, H.C.; Shirinzadeh, B.; Smith, J.L. Enhanced sliding mode motion tracking control of piezoelectric actuators. Sens. Actuator A-Phys. 2007, 138, 194–202. [Google Scholar] [CrossRef]
- Slotine, J.J.E.; Li, W.P. Applied Nonlinear Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1991. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| m | 0.015 | Kg |
| b | 0.01 | N s/m |
| k | N/m | |
| d | m/V | |
| 0.4587 | - | |
| 0.05 | - | |
| 0.0157 | - |
| PID | SMCPE |
|---|---|
| = 0.0002 | = 1800 |
| = 1.01 × | k = 2200 |
| = 2.6 × | = 1.2 |
| ∼ | = 0.001 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, B.; Li, Y. Hysteresis Compensation and Sliding Mode Control with Perturbation Estimation for Piezoelectric Actuators. Micromachines 2018, 9, 241. https://doi.org/10.3390/mi9050241
Ding B, Li Y. Hysteresis Compensation and Sliding Mode Control with Perturbation Estimation for Piezoelectric Actuators. Micromachines. 2018; 9(5):241. https://doi.org/10.3390/mi9050241
Chicago/Turabian StyleDing, Bingxiao, and Yangmin Li. 2018. "Hysteresis Compensation and Sliding Mode Control with Perturbation Estimation for Piezoelectric Actuators" Micromachines 9, no. 5: 241. https://doi.org/10.3390/mi9050241
APA StyleDing, B., & Li, Y. (2018). Hysteresis Compensation and Sliding Mode Control with Perturbation Estimation for Piezoelectric Actuators. Micromachines, 9(5), 241. https://doi.org/10.3390/mi9050241