
Evolution of the Microrobots: Stimuli-Responsive Materials and Additive Manufacturing Technologies Turn Small Structures into Microscale Robots
 , , and
, , and
Abstract
:1. Introduction

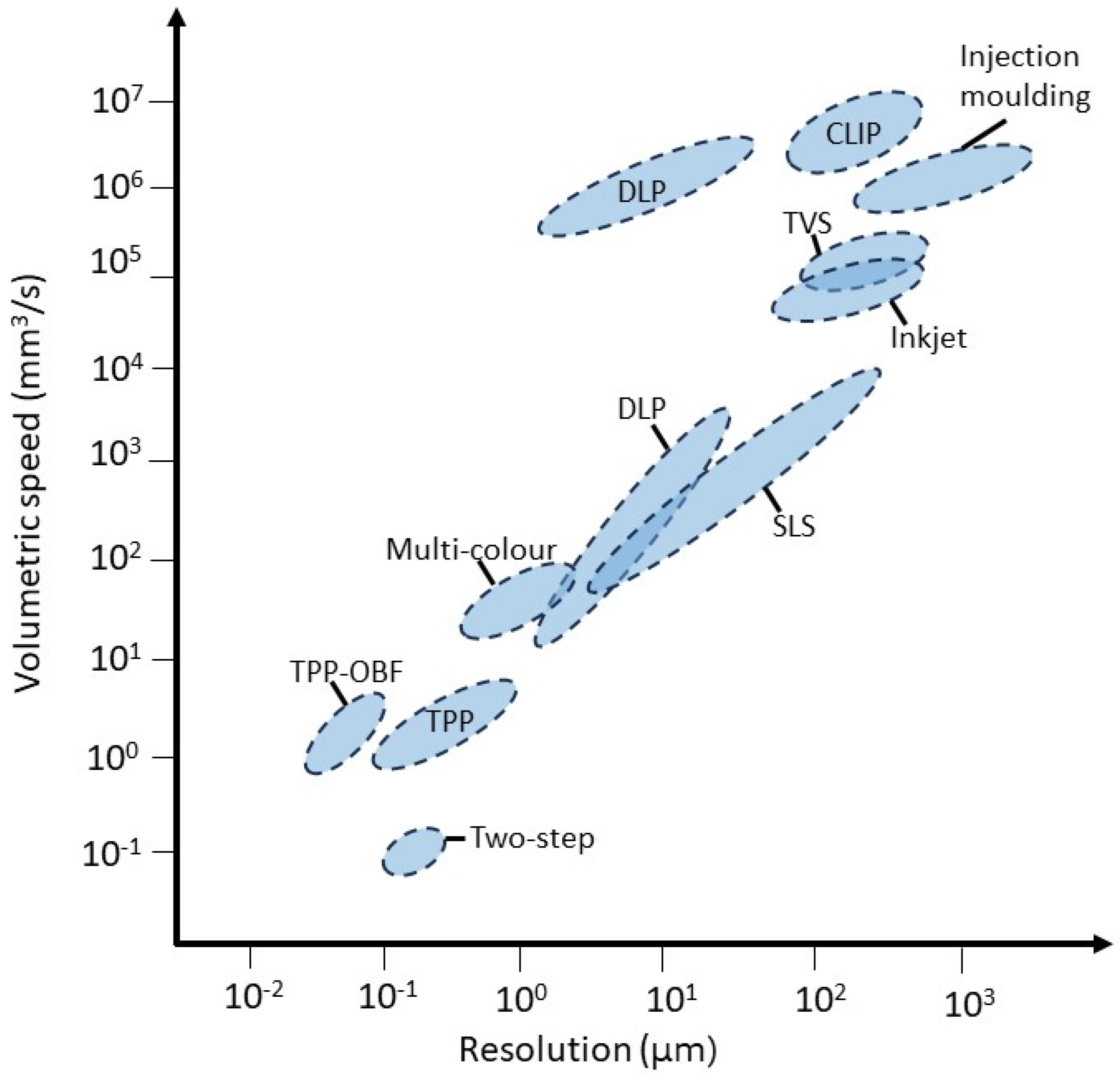
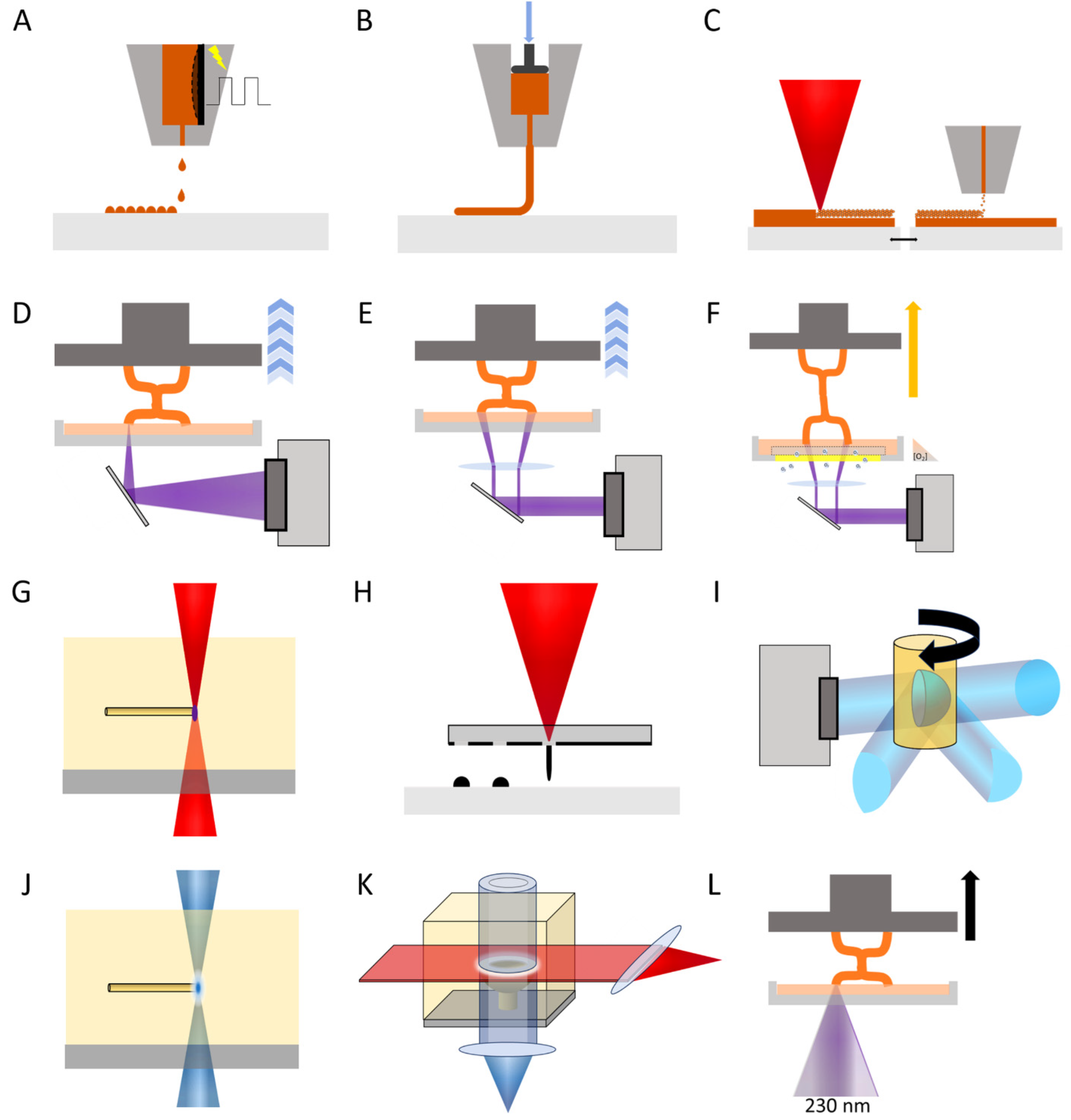
2. Current Additive Manufacturing Fabrication Technologies for Microrobotics
2.1. Stereolithography (SLA)
2.2. Digital Light Processing (DLP)
2.3. Continuous Liquid Interface Production (CLIP)
2.4. Two-Photon Lithography (TPL)
2.5. Laser-Induced Forward Transfer (LIFT)
2.6. Selective Laser Sintering (SLS)
2.7. Inkjet Printing
2.8. Microextrusion
3. Emerging Microfabrication Technologies
3.1. Tomographic Volumetric Stereolithography (TVS)
3.2. Two-Step Absorption Polymerization
3.3. Two-Color Two-Step
3.4. Initiator Free Polymerization
4. Current Materials for Microactuation
4.1. Liquid Crystal Elastomers

4.2. Stimuli-Responsive Hydrogels
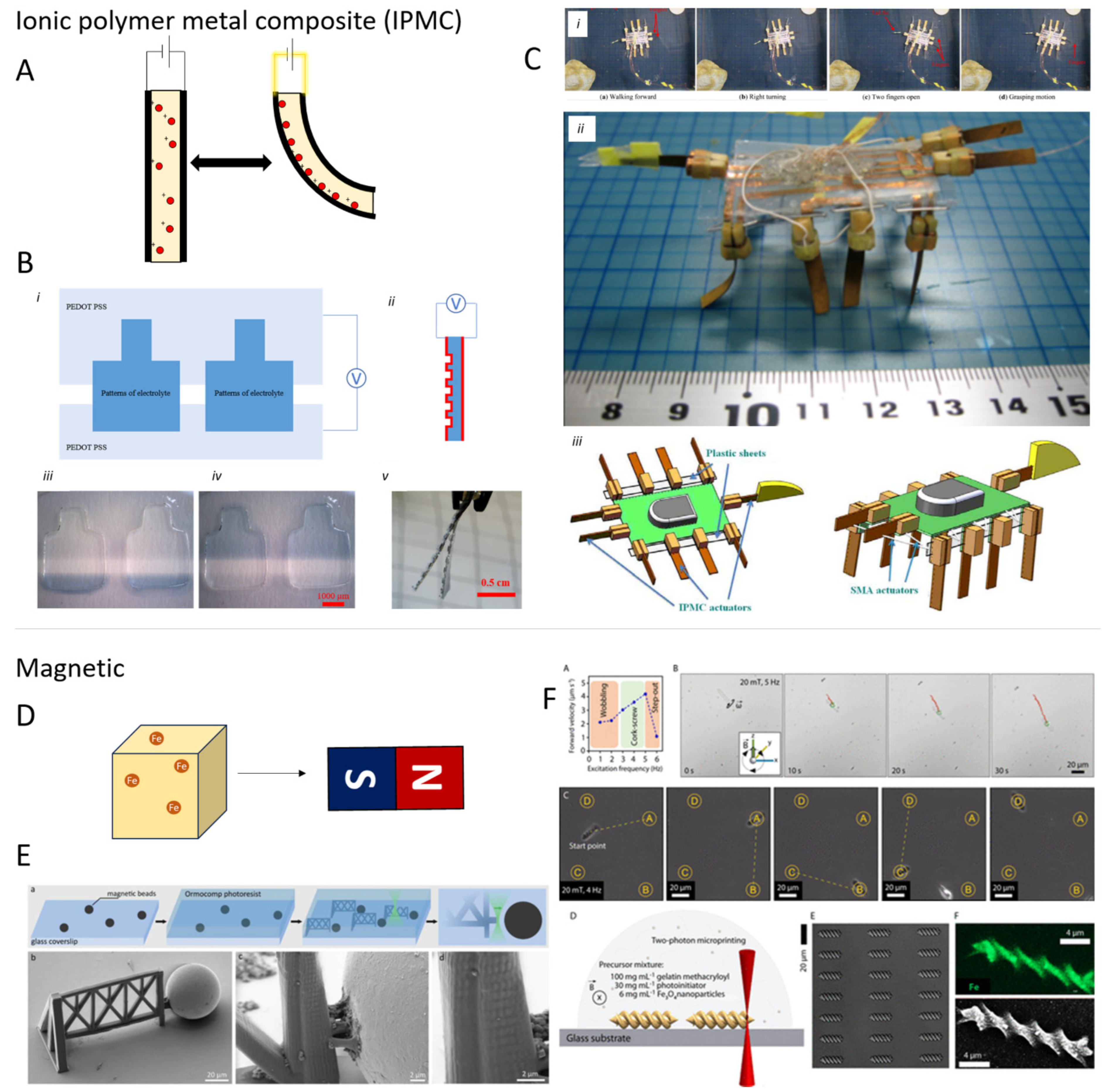
4.3. Magnetic Polymers and Elastomers
4.4. Electro-Active Polymers
5. Emerging Materials for Microactuation Technologies
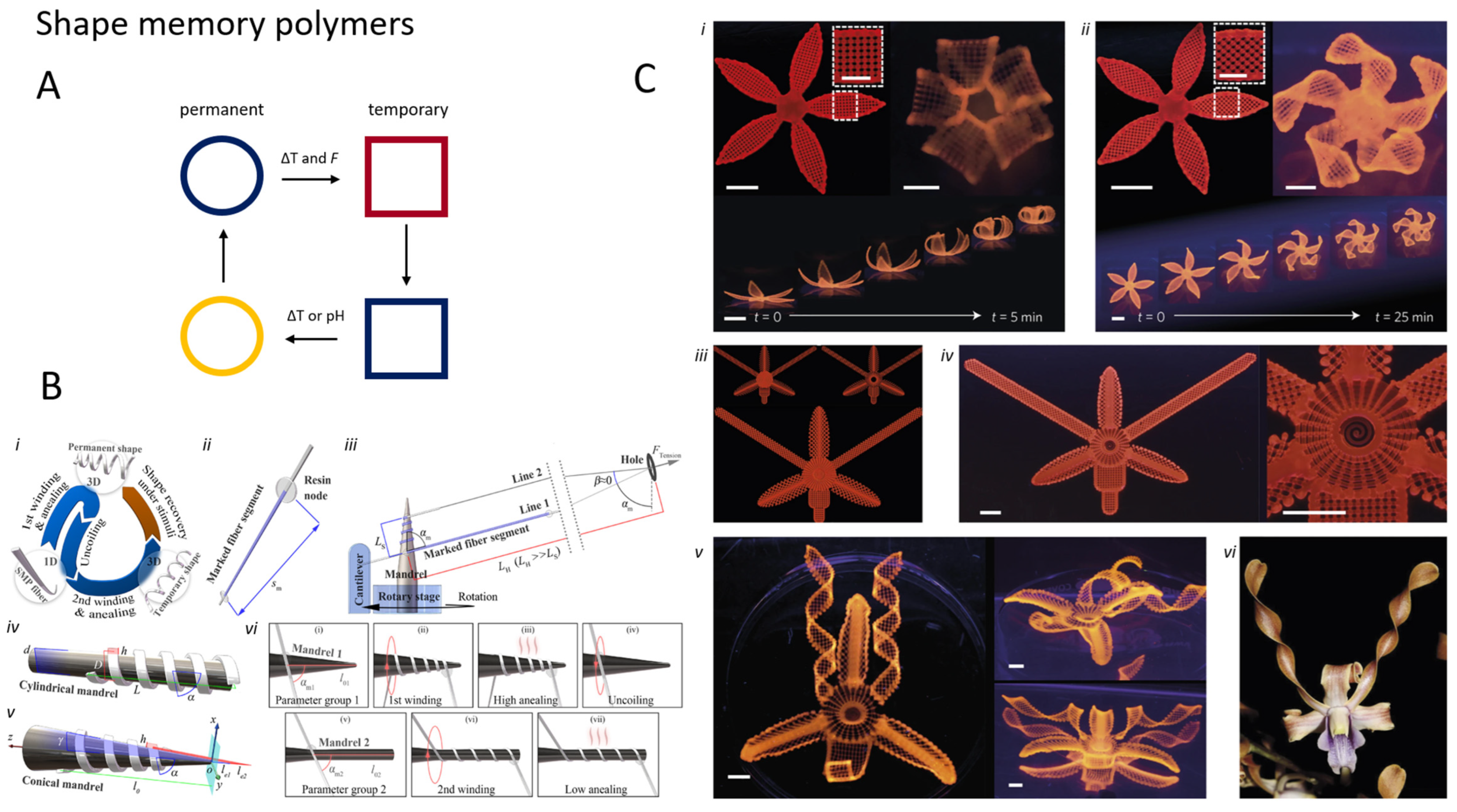
5.1. Shape Memory Polymers (SMPs)
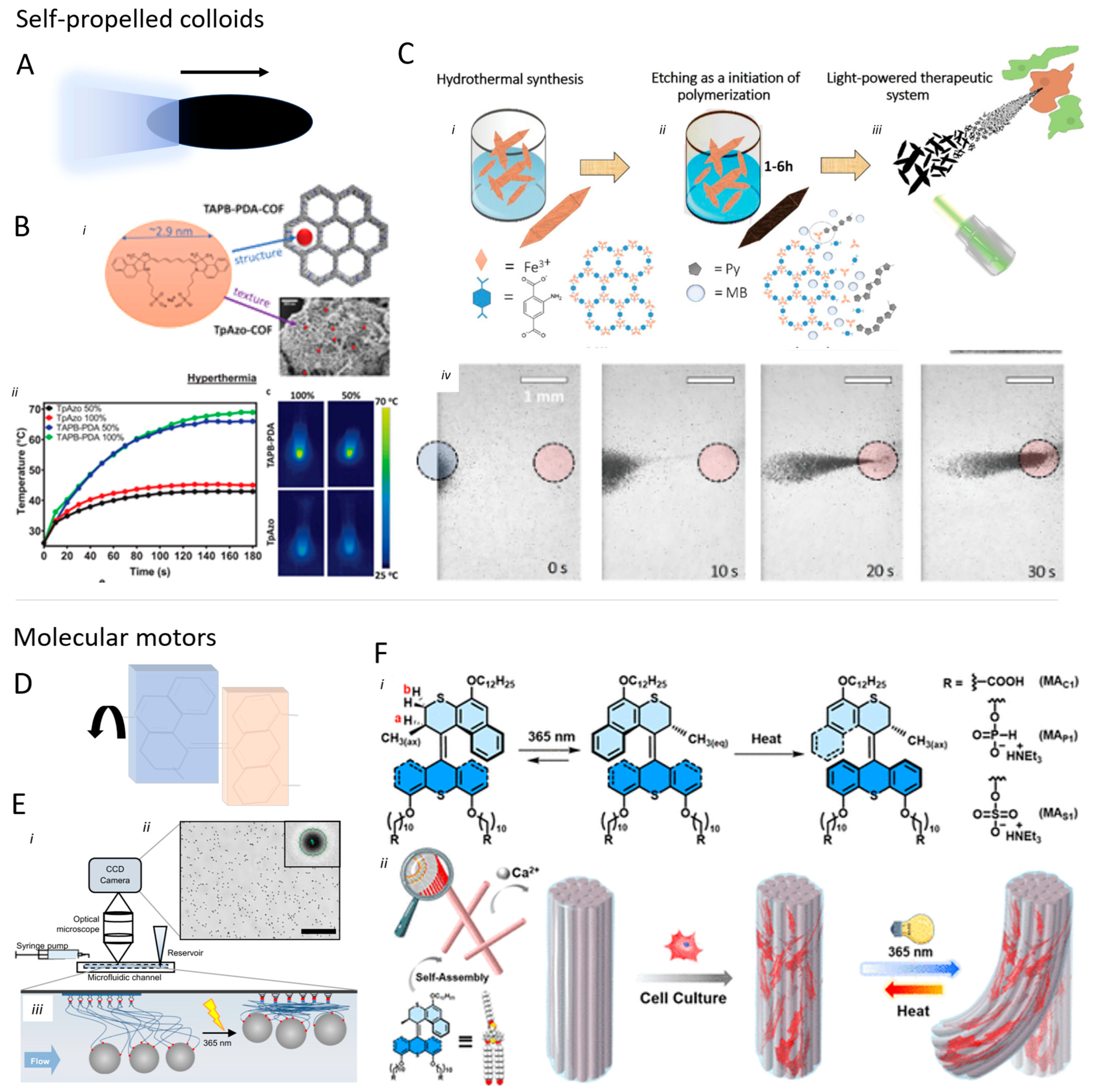
5.2. Self-Propelled Colloids
5.3. Molecular Motors
5.4. Self-Assembled Materials and Microrobots
5.5. Multi-Responsive Materials
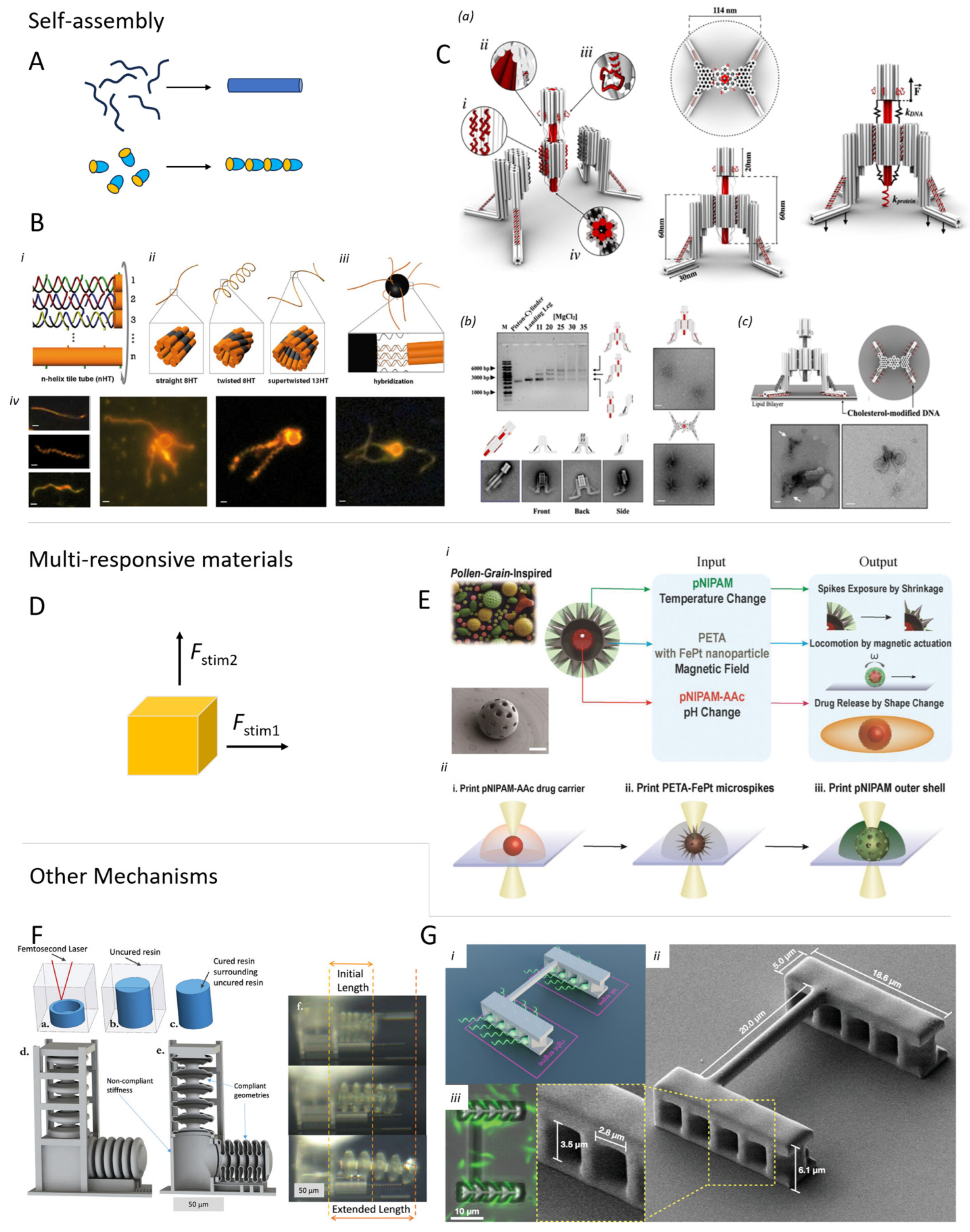
5.6. Pneumatics and Hydraulics
6. Perspective and Outlook
6.1. Technology
6.2. Materials
6.3. Emerging Methods
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Dario, P.; Valleggi, R.; Carrozza, M.C.; Montesi, M.C.; Cocco, M. Microactuators for microrobots: A critical survey. J. Micromech. Microeng. 1992, 2, 141. [Google Scholar] [CrossRef]
- Nauber, R.; Goudu, S.R.; Goeckenjan, M.; Bornhäuser, M.; Ribeiro, C.; Medina-Sánchez, M. Medical microrobots in reproductive medicine from the bench to the clinic. Nat. Commun. 2023, 14, 728. [Google Scholar] [CrossRef] [PubMed]
- Palagi, S.; Fischer, P. Bioinspired microrobots. Nat. Rev. Mater. 2018, 3, 113–124. [Google Scholar] [CrossRef]
- Medina-Sánchez, M.; Magdanz, V.; Guix, M.; Fomin, V.M.; Schmidt, O.G. Swimming Microrobots: Soft, Reconfigurable, and Smart. Adv. Funct. Mater. 2018, 28, 1707228. [Google Scholar] [CrossRef]
- Appiah, C.; Arndt, C.; Siemsen, K.; Heitmann, A.; Staubitz, A.; Selhuber-Unkel, C. Living Materials Herald a New Era in Soft Robotics. Adv. Mater. 2019, 31, 1807747. [Google Scholar] [CrossRef] [PubMed]
- Bellouard, Y.; Clavel, R.; Bidaux, J.E.; Gotthardt, R.; Sidler, T. A concept for monolithic shape memory alloy micro-devices. J. Phys. IV Colloq. 1997, 7, C5/603–C5/608. [Google Scholar] [CrossRef]
- Jager, E.W.H.; Inganäs, O.; Lundström, I. Microrobots for micrometer-size objects in aqueous media: Potential tools for single-cell manipulation. Science 2000, 288, 2335–2338. [Google Scholar] [CrossRef] [PubMed]
- Frutiger, D.R.; Vollmers, K.; Kratochvil, B.E.; Nelson, B.J. Small, Fast, and Under Control: Wireless Resonant Magnetic Micro-agents. Int. J. Robot. Res. 2009, 29, 613–636. [Google Scholar] [CrossRef]
- Tottori, S.; Zhang, L.; Qiu, F.; Krawczyk, K.K.; Franco-Obregõn, A.; Nelson, B.J. Magnetic Helical Micromachines: Fabrication, Controlled Swimming, and Cargo Transport. Adv. Mater. 2012, 24, 811–816. [Google Scholar] [CrossRef]
- Martella, D.; Nocentini, S.; Nuzhdin, D.; Parmeggiani, C.; Wiersma, D.S. Photonic Microhand with Autonomous Action. Adv. Mater. 2017, 29, 1704047. [Google Scholar] [CrossRef]
- Pellicciotta, N.; Bagal, O.S.; Carmona Sosa, V.; Frangipane, G.; Vizsnyiczai, G.; Di Leonardo, R.; Pellicciotta, N.; Bagal, O.S.; Sosa, V.C.; Frangipane, G.; et al. Light Controlled Biohybrid Microbots. Adv. Funct. Mater. 2023, 33, 2214801. [Google Scholar] [CrossRef]
- Dabbagh, S.R.; Sarabi, M.R.; Birtek, M.T.; Seyfi, S.; Sitti, M.; Tasoglu, S. 3D-printed microrobots from design to translation. Nat. Commun. 2022, 13, 5875. [Google Scholar] [CrossRef]
- Rajabasadi, F.; Schwarz, L.; Medina-Sánchez, M.; Schmidt, O.G. 3D and 4D lithography of untethered microrobots. Prog. Mater. Sci. 2021, 120, 100808. [Google Scholar] [CrossRef]
- Li, J.; Pumera, M. 3D printing of functional microrobots. Chem. Soc. Rev. 2021, 50, 2794–2838. [Google Scholar] [CrossRef]
- Huang, J.; Qin, Q.; Wang, J. A Review of Stereolithography: Processes and Systems. Processes 2020, 8, 1138. [Google Scholar] [CrossRef]
- Wang, X.; Liu, J.; Zhang, Y.; Kristiansen, P.M.; Islam, A.; Gilchrist, M.; Zhang, N. Advances in precision microfabrication through digital light processing: System development, material and applications. Virtual Phys. Prototyp. 2023, 18, e2248101. [Google Scholar] [CrossRef]
- Vidler, C.; Crozier, K.; Collins, D. Ultra-resolution scalable microprinting. Microsyst. Nanoeng. 2023, 9, 67. [Google Scholar] [CrossRef] [PubMed]
- Janusziewicz, R.; Tumbleston, J.R.; Quintanilla, A.L.; Mecham, S.J.; DeSimone, J.M. Layerless fabrication with continuous liquid interface production. Proc. Natl. Acad. Sci. USA 2016, 113, 11703–11708. [Google Scholar] [CrossRef] [PubMed]
- Kelly, B.E.; Bhattacharya, I.; Heidari, H.; Shusteff, M.; Spadaccini, C.M.; Taylor, H.K. Volumetric additive manufacturing via tomographic reconstruction. Science 2019, 363, 1075–1079. [Google Scholar] [CrossRef]
- Loterie, D.; Delrot, P.; Moser, C. High-resolution tomographic volumetric additive manufacturing. Nat. Commun. 2020, 11, 852. [Google Scholar] [CrossRef]
- Serra, P.; Piqué, A. Laser-Induced Forward Transfer: Fundamentals and Applications. Adv. Mater. Technol. 2019, 4, 1800099. [Google Scholar] [CrossRef]
- Lee, C.K.W.; Pan, Y.; Yang, R.; Kim, M.; Li, M.G. Laser-Induced Transfer of Functional Materials. Top. Curr. Chem. 2023, 381, 18. [Google Scholar] [CrossRef]
- Roy, N.K.; Behera, D.; Dibua, O.G.; Foong, C.S.; Cullinan, M.A. A novel microscale selective laser sintering (μ-SLS) process for the fabrication of microelectronic parts. Microsyst. Nanoeng. 2019, 5, 64. [Google Scholar] [CrossRef]
- Tabriz, A.G.; Kuofie, H.; Scoble, J.; Boulton, S.; Douroumis, D. Selective Laser Sintering for printing pharmaceutical dosage forms. J. Drug Deliv. Sci. Technol. 2023, 86, 104699. [Google Scholar] [CrossRef]
- GmbH, N. Photonic Professional GT2 Make Small Things Matter. Available online: https://www.nanoscribe.com/en/products/photonic-professional-gt2/ (accessed on 1 December 2023).
- Tanaka, T.; Sun, H.B.; Kawata, S. Rapid sub-diffraction-limit laser micro/nanoprocessing in a threshold material system. Appl. Phys. Lett. 2002, 80, 312–314. [Google Scholar] [CrossRef]
- Yi, C.; Qu, S.; Wang, Y.; Qi, H.; Zhang, Y.; Cheng, G.J. Optical force brush enabled free-space painting of 4D functional structures. Sci. Adv. 2023, 9, eadg0300. [Google Scholar] [CrossRef] [PubMed]
- Lau, G.K.; Shrestha, M. Ink-Jet Printing of Micro-Electro-Mechanical Systems (MEMS). Micromachines 2017, 8, 194. [Google Scholar] [CrossRef]
- Sztymela, K.; Bienia, M.; Rossignol, F.; Mailley, S.; Ziesche, S.; Varghese, J.; Cerbelaud, M. Fabrication of modern lithium ion batteries by 3D inkjet printing: Opportunities and challenges. Heliyon 2022, 8, e12623. [Google Scholar] [CrossRef] [PubMed]
- Udofia, E.N.; Zhou, W. Microextrusion Based 3D Printing—A Review. In 2018 International Solid Freeform Fabrication Symposium; University of Texas at Austin: Austin, TX, USA, 2018. [Google Scholar]
- Hahn, V.; Messer, T.; Bojanowski, N.M.; Curticean, E.R.; Wacker, I.; Schröder, R.R.; Blasco, E.; Wegener, M. Two-step absorption instead of two-photon absorption in 3D nanoprinting. Nat. Photonics 2021, 15, 932–938. [Google Scholar] [CrossRef]
- Hahn, V.; Rietz, P.; Hermann, F.; Müller, P.; Barner-Kowollik, C.; Schlöder, T.; Wenzel, W.; Blasco, E.; Wegener, M. Light-sheet 3D microprinting via two-colour two-step absorption. Nat. Photonics 2022, 16, 784–791. [Google Scholar] [CrossRef]
- Jagtap, A.; More, A. A review on self-initiated and photoinitiator-free system for photopolymerization. Polym. Bull. 2021, 79, 8057–8091. [Google Scholar] [CrossRef]
- Ikuta, K.; Hirowatari, K.; Ogata, T. Three dimensional micro integrated fluid systems (MIFS) fabricated by stereo lithography. In Proceedings of the Proceedings IEEE Micro Electro Mechanical Systems an Investigation of Micro Structures, Sensors, Actuators, Machines and Robotic Systems, Oiso, Japan, 25–28 January 1994; pp. 1–6. [Google Scholar]
- Jiang, X.N.; Sun, C.; Zhang, X.; Xu, B.; Ye, Y.H. Microstereolithography of lead zirconate titanate thick film on silicon substrate. Sens. Actuators A Phys. 2000, 87, 72–77. [Google Scholar] [CrossRef]
- Mu, Q.; Wang, L.; Dunn, C.K.; Kuang, X.; Duan, F.; Zhang, Z.; Qi, H.J.; Wang, T. Digital light processing 3D printing of conductive complex structures. Addit. Manuf. 2017, 18, 74–83. [Google Scholar] [CrossRef]
- Ge, Q.; Li, Z.; Wang, Z.; Kowsari, K.; Zhang, W.; He, X.; Zhou, J.; Fang, N.X. Projection micro stereolithography based 3D printing and its applications. Int. J. Extrem. Manuf. 2020, 2, 022004. [Google Scholar] [CrossRef]
- Han, D.; Lu, Z.; Chester, S.A.; Lee, H. Micro 3D Printing of a Temperature-Responsive Hydrogel Using Projection Micro-Stereolithography. Sci. Rep. 2018, 8, 1963. [Google Scholar] [CrossRef] [PubMed]
- Maruo, S.; Kawata, S.; Nakamura, O. Three-dimensional microfabrication with two-photon-absorbed photopolymerization. Opt. Lett. 1997, 22, 132–134. [Google Scholar] [CrossRef]
- Batchelor, R.; Messer, T.; Hippler, M.; Wegener, M.; Barner-Kowollik, C.; Blasco, E. Two in One: Light as a Tool for 3D Printing and Erasing at the Microscale. Adv. Mater. 2019, 31, 1904085. [Google Scholar] [CrossRef]
- Carlotti, M.; Tricinci, O.; Mattoli, V. Novel, High-Resolution, Subtractive Photoresist Formulations for 3D Direct Laser Writing Based on Cyclic Ketene Acetals. Adv. Mater. Technol. 2022, 7, 2101590. [Google Scholar] [CrossRef]
- Gansel, J.K.; Thiel, M.; Rill, M.S.; Decker, M.; Bade, K.; Saile, V.; Von Freymann, G.; Linden, S.; Wegener, M. Gold helix photonic metamaterial as broadband circular polarizer. Science 2009, 325, 1513–1515. [Google Scholar] [CrossRef]
- Liberale, C.; Cojoc, G.; Candeloro, P.; Das, G.; Gentile, F.; De Angelis, F.; Di Fabrizio, E. Micro-optics fabrication on top of optical fibers using two-photon lithography. IEEE Photonics Technol. Lett. 2010, 22, 474–476. [Google Scholar] [CrossRef]
- Carlotti, M.; Mattoli, V. Functional Materials for Two-Photon Polymerization in Microfabrication. Small 2019, 1902687. [Google Scholar] [CrossRef] [PubMed]
- Zandrini, T.; Taniguchi, S.; Maruo, S. Magnetically Driven Micromachines Created by Two-Photon Microfabrication and Selective Electroless Magnetite Plating for Lab-on-a-Chip Applications. Micromachines 2017, 8, 35. [Google Scholar] [CrossRef]
- Chin, B.D.; Suh, M.C.; Kim, M.H.; Kang, T.M.; Yang, N.C.; Song, M.W.; Lee, S.T.; Kwon, J.H.; Chung, H.K.; Wolk, M.B.; et al. High efficiency AMOLED using hybrid of small molecule and polymer materials patterned by laser transfer. J. Inf. Disp. 2003, 4, 1–5. [Google Scholar] [CrossRef]
- Tsuboi, Y.; Furuhata, Y.; Kitamura, N. A sensor for adenosine triphosphate fabricated by laser-induced forward transfer of luciferase onto a poly(dimethylsiloxane) microchip. Appl. Surf. Sci. 2007, 253, 8422–8427. [Google Scholar] [CrossRef]
- Constantinescu, C.; Rapp, L.; Diallo, A.K.; Videlot-Ackermann, C.; Delaporte, P.; Alloncle, P. Microcapacitors with controlled electrical capacity in the pF–nF range printed by laser-induced forward transfer (LIFT). Org. Electron. 2015, 20, 1–7. [Google Scholar] [CrossRef]
- Rapp, L.; Diallo, A.K.; Alloncle, A.P.; Videlot-Ackermann, C.; Fages, F.; Delaporte, P. Pulsed-laser printing of organic thin-film transistors. Appl. Phys. Lett. 2009, 95, 171109. [Google Scholar] [CrossRef]
- Das, A.; Ghosh, A.; Chattopadhyaya, S.; Ding, C.F. A review on critical challenges in additive manufacturing via laser-induced forward transfer. Opt. Laser Technol. 2024, 168, 109893. [Google Scholar] [CrossRef]
- Getto, E.; Santucci, R.J.; Gibbs, J.; Link, R.; Retzlaff, E.; Baker, B.; Koul, M.; Croom, B.; Montalbano, T.; Storck, S.; et al. Powder plasma spheroidization treatment and the characterization of microstructure and mechanical properties of SS 316L powder and L-PBF builds. Heliyon 2023, 9, e16583. [Google Scholar] [CrossRef]
- Danzebrink, R.; Aegerter, M.A. Deposition of micropatterned coating using an ink-jet technique. Thin Solid Films 1999, 351, 115–118. [Google Scholar] [CrossRef]
- Calvert, P. Inkjet printing for materials and devices. Chem. Mater. 2001, 13, 3299–3305. [Google Scholar] [CrossRef]
- Anderson, J.R.; Chiu, D.T.; Jackman, R.J.; Chemiavskaya, O.; McDonald, J.C.; Wu, H.; Whitesides, S.H.; Whitesides, G.M. Fabrication of Topologically Complex Three-Dimensional Microfluidic Systems in PDMS by Rapid Prototyping. Anal. Chem. 2000, 72, 3158–3164. [Google Scholar] [CrossRef] [PubMed]
- Ahn, B.Y.; Duoss, E.B.; Motala, M.J.; Guo, X.; Park, S.I.; Xiong, Y.; Yoon, J.; Nuzzo, R.G.; Rogers, J.A.; Lewis, J.A. Omnidirectional printing of flexible, stretchable, and spanning silver microelectrodes. Science 2009, 323, 1590–1593. [Google Scholar] [CrossRef] [PubMed]
- Van Der Laan, H.L.; Burns, M.A.; Scott, T.F. Volumetric Photopolymerization Confinement through Dual-Wavelength Photoinitiation and Photoinhibition. ACS Macro Lett. 2019, 8, 899–904. [Google Scholar] [CrossRef] [PubMed]
- Mulder, D.J.; van Vliet, W.A.; Laagland, M.; Narayanan, A.; Kostenko, A.; Mulder, D.J.; van Vliet, W.A.; Laagland, M.; Narayanan, A.; Kostenko, A. Rapid micro-prototyping by single-photon two-wavelength volumetric lithography. Laser 3D Manuf. SPIE 2023, 12412, 1241203. [Google Scholar]
- Sousa, C.M.; Fernandes, J.R.; Coelho, P.J. Naphthopyrans as efficient dual color photoinitiators for volumetric 3D printing. Eur. Polym. J. 2023, 196, 112312. [Google Scholar] [CrossRef]
- Regehly, M.; Garmshausen, Y.; Reuter, M.; König, N.F.; Israel, E.; Kelly, D.P.; Chou, C.Y.; Koch, K.; Asfari, B.; Hecht, S. Xolography for linear volumetric 3D printing. Nature 2020, 588, 620–624. [Google Scholar] [CrossRef]
- Furutani, M.; Ide, T.; Kinoshita, S.; Horiguchi, R.; Mori, I.; Sakai, K.; Arimitsu, K. Initiator-free photopolymerization of common acrylate monomers with 254 nm light. Polym. Int. 2019, 68, 79–82. [Google Scholar] [CrossRef]
- Scherzer, T.; Knolle, W.; Naumov, S.; Mehnert, R. Direct initiation of the photopolymerization of acrylates by short-wavelength excimer UV radiation. Nucl. Instrum. Methods Phys. Res. Sect. B Beam Interact. Mater. Atoms 2003, 208, 271–276. [Google Scholar] [CrossRef]
- Leonards, H.; Engelhardt, S.; Hoffmann, A.; Pongratz, L.; Schriever, S.; Bläsius, J.; Wehner, M.; Gillner, A. Advantages and drawbacks of Thiol-ene based resins for 3D-printing. Laser 3D Manuf. SPIE 2015, 9353, 52–58. [Google Scholar]
- Mohd Jani, J.; Leary, M.; Subic, A.; Gibson, M.A. A review of shape memory alloy research, applications and opportunities. Mater. Des. 2014, 56, 1078–1113. [Google Scholar] [CrossRef]
- Martella, D.; Paoli, P.; Pioner, J.M.; Sacconi, L.; Coppini, R.; Santini, L.; Lulli, M.; Cerbai, E.; Wiersma, D.S.; Poggesi, C.; et al. Liquid Crystalline Networks toward Regenerative Medicine and Tissue Repair. Small 2017, 13, 1702677. [Google Scholar] [CrossRef]
- Davidson, Z.S.; Shahsavan, H.; Aghakhani, A.; Guo, Y.; Hines, L.; Xia, Y.; Yang, S.; Sitti, M. Monolithic shape-programmable dielectric liquid crystal elastomer actuators. Sci. Adv. 2019, 5, eaay0855. [Google Scholar] [CrossRef]
- Guin, T.; Settle, M.J.; Kowalski, B.A.; Auguste, A.D.; Beblo, R.V.; Reich, G.W.; White, T.J. Layered liquid crystal elastomer actuators. Nat. Commun. 2018, 9, 2531. [Google Scholar] [CrossRef]
- Camacho-Lopez, M.; Finkelmann, H.; Palffy-Muhoray, P.; Shelley, M. Fast liquid-crystal elastomer swims into the dark. Nat. Mater. 2004, 3, 307–310. [Google Scholar] [CrossRef] [PubMed]
- Yao, Y.; Waters, J.T.; Shneidman, A.V.; Cui, J.; Wang, X.; Mandsberg, N.K.; Li, S.; Balazs, A.C.; Aizenberg, J. Multiresponsive polymeric microstructures with encoded predetermined and self-regulated deformability. Proc. Natl. Acad. Sci. USA 2018, 115, 12950–12955. [Google Scholar] [CrossRef] [PubMed]
- Tabrizi, M.; Ware, T.H.; Shankar, M.R. Voxelated Molecular Patterning in Three-Dimensional Freeforms. ACS Appl. Mater. Interfaces 2019, 11, 28236–28245. [Google Scholar] [CrossRef] [PubMed]
- Ware, T.H.; McConney, M.E.; Wie, J.J.; Tondiglia, V.P.; White, T.J. Voxelated liquid crystal elastomers. Science 2015, 347, 982–984. [Google Scholar] [CrossRef] [PubMed]
- Kotikian, A.; Truby, R.L.; Boley, J.W.; White, T.J.; Lewis, J.A. 3D Printing of Liquid Crystal Elastomeric Actuators with Spatially Programed Nematic Order. Adv. Mater. 2018, 30, 1706164. [Google Scholar] [CrossRef] [PubMed]
- Palagi, S.; Mark, A.G.; Reigh, S.Y.; Melde, K.; Qiu, T.; Zeng, H.; Parmeggiani, C.; Martella, D.; Sanchez-Castillo, A.; Kapernaum, N.; et al. Structured light enables biomimetic swimming and versatile locomotion of photoresponsive soft microrobots. Nat. Mater. 2016, 15, 647–653. [Google Scholar] [CrossRef] [PubMed]
- McCracken, J.M.; Tondiglia, V.P.; Auguste, A.D.; Godman, N.P.; Donovan, B.R.; Bagnall, B.N.; Fowler, H.E.; Baxter, C.M.; Matavulj, V.; Berrigan, J.D.; et al. Microstructured Photopolymerization of Liquid Crystalline Elastomers in Oxygen-Rich Environments. Adv. Funct. Mater. 2019, 29, 1903761. [Google Scholar] [CrossRef]
- Palagi, S.; Singh, D.P.; Fischer, P. Light-Controlled Micromotors and Soft Microrobots. Adv. Opt. Mater. 2019, 7, 1900370. [Google Scholar] [CrossRef]
- Chen, L.; Dong, Y.; Tang, C.-Y.; Zhong, L.; Law, W.-C.; Tsui, G.C.P.; Yang, Y.; Xie, X. Development of Direct-Laser-Printable Light-Powered Nanocomposites. ACS Appl. Mater. Interfaces 2019, 11, 19541–19553. [Google Scholar] [CrossRef]
- Montesino, L.; Martínez, J.I.; Sánchez-Somolinos, C.; Montesino, L.; Martínez, J.I.; Sánchez-Somolinos, C. Reprogrammable 4D Printed Liquid Crystal Elastomer Photoactuators by Means of Light-Reversible Perylene Diimide Radicals. Adv. Funct. Mater. 2023, 2309019. [Google Scholar] [CrossRef]
- Zeng, H.; Wasylczyk, P.; Parmeggiani, C.; Martella, D.; Burresi, M.; Wiersma, D.S. Light-Fueled Microscopic Walkers. Adv. Mater. 2015, 27, 3883–3887. [Google Scholar] [CrossRef]
- Zuo, B.; Wang, M.; Lin, B.P.; Yang, H. Visible and infrared three-wavelength modulated multi-directional actuators. Nat. Commun. 2019, 10, 4539. [Google Scholar] [CrossRef]
- Münchinger, A.; Hahn, V.; Beutel, D.; Woska, S.; Monti, J.; Rockstuhl, C.; Blasco, E.; Wegener, M. Multi-Photon 4D Printing of Complex Liquid Crystalline Microstructures by In Situ Alignment Using Electric Fields. Adv. Mater. Technol. 2022, 7, 2100944. [Google Scholar] [CrossRef]
- Carlotti, M.; Mattoli, V.; Tricinci, O.; den Hoed, F.; Palagi, S. Direct laser writing of liquid crystal elastomers oriented by a horizontal electric field. Open Res. Eur. 2021, 1, 129. [Google Scholar] [CrossRef] [PubMed]
- Lahikainen, M.; Kuntze, K.; Zeng, H.; Helantera, S.; Hecht, S.; Priimagi, A. Tunable Photomechanics in Diarylethene-Driven Liquid Crystal Network Actuators. ACS Appl. Mater. Interfaces 2020, 12, 47939–47947. [Google Scholar] [CrossRef] [PubMed]
- Urayama, K.; Honda, S.; Takigawa, T. Deformation coupled to director rotation in swollen nematic elastomers under electric fields. Macromolecules 2006, 39, 1943–1949. [Google Scholar] [CrossRef]
- Michal, B.T.; McKenzie, B.M.; Felder, S.E.; Rowan, S.J. Metallo-, thermo-, and photoresponsive shape memory and actuating liquid crystalline elastomers. Macromolecules 2015, 48, 3239–3246. [Google Scholar] [CrossRef]
- Gruzdenko, A.; Dierking, I. Liquid crystal-based actuators. Front. Soft Matter 2022, 2, 1052037. [Google Scholar] [CrossRef]
- Hsu, L.Y.; Mainik, P.; Münchinger, A.; Lindenthal, S.; Spratte, T.; Welle, A.; Zaumseil, J.; Selhuber-Unkel, C.; Wegener, M.; Blasco, E. A Facile Approach for 4D Microprinting of Multi-Photoresponsive Actuators. Adv. Mater. Technol. 2023, 8, 2200801. [Google Scholar] [CrossRef]
- Wang, J.Y.; Jin, F.; Dong, X.Z.; Liu, J.; Zhou, M.X.; Li, T.; Zheng, M.L. Dual-Stimuli Cooperative Responsive Hydrogel Microactuators Via Two-Photon Lithography. Small 2023, 19, 2303166. [Google Scholar] [CrossRef] [PubMed]
- Tudor, A.; Delaney, C.; Zhang, H.; Thompson, A.J.; Curto, V.F.; Yang, G.-Z.; Higgins, M.J.; Diamond, D.; Florea, L. Fabrication of soft, stimulus-responsive structures with sub-micron resolution via two-photon polymerization of poly(ionic liquid)s. Mater. Today 2018, 21, 807–816. [Google Scholar] [CrossRef]
- Jiang, Z.; Tan, M.L.; Taheri, M.; Yan, Q.; Tsuzuki, T.; Gardiner, M.G.; Diggle, B.; Connal, L.A. Strong, Self-Healable, and Recyclable Visible-Light-Responsive Hydrogel Actuators. Angew. Chem. Int. Ed. 2020, 59, 7049–7056. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Iscen, A.; Palmer, L.C.; Schatz, G.C.; Stupp, S.I. Light-Driven Expansion of Spiropyran Hydrogels. J. Am. Chem. Soc. 2020, 142, 8447–8453. [Google Scholar] [CrossRef]
- Zarzar, L.D.; Kim, P.; Kolle, M.; Brinker, C.J.; Aizenberg, J.; Kaehr, B. Direct Writing and Actuation of Three-Dimensionally Patterned Hydrogel Pads on Micropillar Supports. Angew. Chem. Int. Ed. 2011, 50, 9356–9360. [Google Scholar] [CrossRef]
- Hippler, M.; Blasco, E.; Qu, J.; Tanaka, M.; Barner-Kowollik, C.; Wegener, M.; Bastmeyer, M. Controlling the shape of 3D microstructures by temperature and light. Nat. Commun. 2019, 10, 232. [Google Scholar] [CrossRef]
- Mourran, A.; Zhang, H.; Vinokur, R.; Möller, M.; Mourran, A.; Zhang, H.; Vinokur, R.; Möller, M. Soft Microrobots Employing Nonequilibrium Actuation via Plasmonic Heating. Adv. Mater. 2017, 29, 1604825. [Google Scholar] [CrossRef]
- Breger, J.C.; Yoon, C.; Xiao, R.; Kwag, H.R.; Wang, M.O.; Fisher, J.P.; Nguyen, T.D.; Gracias, D.H. Self-folding thermo-magnetically responsive soft microgrippers. ACS Appl. Mater. Interfaces 2015, 7, 3398–3405. [Google Scholar] [CrossRef]
- Palleau, E.; Morales, D.; Dickey, M.D.; Velev, O.D. Reversible patterning and actuation of hydrogels by electrically assisted ionoprinting. Nat. Commun. 2013, 4, 2257. [Google Scholar] [CrossRef]
- Rehor, I.; Maslen, C.; Moerman, P.G.; Van Ravensteijn, B.G.P.; Van Alst, R.; Groenewold, J.; Eral, H.B.; Kegel, W.K. Photoresponsive Hydrogel Microcrawlers Exploit Friction Hysteresis to Crawl by Reciprocal Actuation. Soft Robot. 2021, 8, 10–18. Available online: https://home.liebertpub.com/soro (accessed on 1 December 2023). [CrossRef]
- Xiong, Z.; Zheng, M.L.; Dong, X.Z.; Chen, W.Q.; Jin, F.; Zhao, Z.S.; Duan, X.M. Asymmetric microstructure of hydrogel: Two-photon microfabrication and stimuli-responsive behavior. Soft Matter 2011, 7, 10353–10359. [Google Scholar] [CrossRef]
- Rekštyte, S.; Paipulas, D.; Malinauskas, M.; Mizeikis, V. Microactuation and sensing using reversible deformations of laser-written polymeric structures. Nanotechnology 2017, 28, 124001. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Wang, Z.; Li, J.; Tian, C.; Wang, Y. Active colloidal molecules assembled via selective and directional bonds. Nat. Commun. 2020, 11, 2670. [Google Scholar] [CrossRef]
- D’eramo, L.; Chollet, B.; Leman, M.; Martwong, E.; Li, M.; Geisler, H.; Dupire, J.; Kerdraon, M.; Vergne, C.; Monti, F.; et al. Microfluidic actuators based on temperature-responsive hydrogels. Microsyst. Nanoeng. 2018, 4, 17069. [Google Scholar] [CrossRef]
- Wei, S.; Liu, J.; Zhao, Y.; Zhang, T.; Zheng, M.; Jin, F.; Dong, X.; Xing, J.; Duan, X. Protein-Based 3D Microstructures with Controllable Morphology and pH-Responsive Properties. ACS Appl. Mater. Interfaces 2017, 9, 42247–42257. [Google Scholar] [CrossRef]
- Ma, Z.C.; Zhang, Y.L.; Han, B.; Hu, X.Y.; Li, C.H.; Chen, Q.D.; Sun, H.B. Femtosecond laser programmed artificial musculoskeletal systems. Nat. Commun. 2020, 11, 4536. [Google Scholar] [CrossRef]
- Wang, X.; Wei, Z.; Baysah, C.Z.; Zheng, M.; Xing, J. Biomaterial-based microstructures fabricated by two-photon polymerization microfabrication technology. RSC Adv. 2019, 9, 34472–34480. [Google Scholar] [CrossRef] [PubMed]
- Ennis, A.; Nicdao, D.; Kolagatla, S.; Dowling, L.; Tskhe, Y.; Thompson, A.J.; Trimble, D.; Delaney, C.; Florea, L.; Ennis, A.; et al. Two-Photon Polymerization of Sugar Responsive 4D Microstructures. Adv. Funct. Mater. 2023, 33, 2213947. [Google Scholar] [CrossRef]
- Wang, H.; Yang, L.; Yang, Y.; Zhang, D.; Tian, A. Highly flexible, large-deformation ionic polymer metal composites for artificial muscles: Fabrication, properties, applications, and prospects. Chem. Eng. J. 2023, 469, 143976. [Google Scholar] [CrossRef]
- Yang, Y.; Ye, X.; Guo, S. A new type of jellyfish-like microrobot. In Proceedings of the 2007 IEEE International Conference on Integration Technology, Shenzhen, China, 20–24 March 2007; pp. 673–678. [Google Scholar]
- Hatipoglua, G.; Yang, L.; Tigelaar, D.; Yoonessi, M.; Zhanga, Q.; Tadigadapa, S. Fabrication and electromechanical performance of a novel high modulus ionogel micro-actuator. Procedia Eng. 2011, 25, 1337–1340. [Google Scholar] [CrossRef]
- Hao, M.; Wang, Y.; Zhu, Z.; He, Q.; Zhu, D.; Luo, M. A Compact Review of IPMC as Soft Actuator and Sensor: Current Trends, Challenges, and Potential Solutions from Our Recent Work. Front. Robot. AI 2019, 6, 496003. [Google Scholar] [CrossRef] [PubMed]
- Shi, L.; Guo, S.; Li, M.; Mao, S.; Xiao, N.; Gao, B.; Song, Z.; Asaka, K. A Novel Soft Biomimetic Microrobot with Two Motion Attitudes. Sensors 2012, 12, 16732–16758. [Google Scholar] [CrossRef] [PubMed]
- Zhong, Y.; Nguyen, G.T.M.; Plesse, C.; Vidal, F.; Jager, E.W.H. Highly Conductive, Photolithographically Patternable Ionogels for Flexible and Stretchable Electrochemical Devices. ACS Appl. Mater. Interfaces 2018, 10, 21601–21611. [Google Scholar] [CrossRef]
- Pétrot, R.; Devillers, T.; Stéphan, O.; Cugat, O.; Tomba, C. Multi-Material 3D Microprinting of Magnetically Deformable Biocompatible Structures. Adv. Funct. Mater. 2023, 2304445. [Google Scholar] [CrossRef]
- Ceylan, H.; Yasa, I.C.; Yasa, O.; Tabak, A.F.; Giltinan, J.; Sitti, M. 3D-Printed Biodegradable Microswimmer for Theranostic Cargo Delivery and Release. ACS Nano 2019, 13, 3353–3362. [Google Scholar] [CrossRef]
- Iacovacci, V.; Lucarini, G.; Ricotti, L.; Dario, P.; Dupont, P.E.; Menciassi, A. Untethered magnetic millirobot for targeted drug delivery. Biomed. Microdevices 2015, 17, 63. [Google Scholar] [CrossRef]
- You, M.; Mou, F.; Wang, K.; Guan, J. Tadpole-Like Flexible Microswimmers with the Head and Tail Both Magnetic. ACS Appl. Mater. Interfaces 2023, 15, 40855–40863. [Google Scholar] [CrossRef]
- Sitti, M.; Wiersma, D.S. Pros and Cons: Magnetic versus Optical Microrobots. Adv. Mater. 2020, 32, 1906766. [Google Scholar] [CrossRef]
- Adam, G.; Chowdhury, S.; Guix, M.; Johnson, B.V.; Bi, C.; Cappelleri, D. Towards Functional Mobile Microrobotic Systems. Robotics 2019, 8, 69. [Google Scholar] [CrossRef]
- Palagi, S.; Pensabene, V.; Sinibaldi, E.; Beccai, L.; Mazzolai, B.; Mattoli, V.; Dario, P.; Menciassi, A. Controlled Magnetic Propulsion of Floating Polymeric Two-Dimensional Nano-Objects. Adv. Robot. 2011, 25, 1029–1047. [Google Scholar] [CrossRef]
- Palagi, S.; Pensabene, V.; Beccai, L.; Mazzolai, B.; Menciassi, A.; Dario, P. Design and development of a soft magnetically-propelled swimming microrobot. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 5109–5114. [Google Scholar]
- Palagi, S.; Mazzolai, B.; Innocenti, C.; Sangregorio, C.; Beccai, L. How does buoyancy of hydrogel microrobots affect their magnetic propulsion in liquids? Appl. Phys. Lett. 2013, 102, 124102. [Google Scholar] [CrossRef]
- Yasa, I.C.; Tabak, A.F.; Yasa, O.; Ceylan, H.; Sitti, M. 3D-Printed Microrobotic Transporters with Recapitulated Stem Cell Niche for Programmable and Active Cell Delivery. Adv. Funct. Mater. 2019, 29, 1808992. [Google Scholar] [CrossRef]
- Sanchis-Gual, R.; Ye, H.; Ueno, T.; Landers, F.C.; Hertle, L.; Deng, S.; Veciana, A.; Xia, Y.; Franco, C.; Choi, H.; et al. 3D Printed Template-Assisted Casting of Biocompatible Polyvinyl Alcohol-Based Soft Microswimmers with Tunable Stability. Adv. Funct. Mater. 2023, 33, 2212952. [Google Scholar] [CrossRef]
- Mauricio Kadiri, V.; Bussi, C.; Holle, A.W.; Son, K.; Kwon, H.; Schütz, G.; Gutierrez, M.G.; Fischer, P.; Kadiri, V.M.; Son, K.; et al. Biocompatible Magnetic Micro- and Nanodevices: Fabrication of FePt Nanopropellers and Cell Transfection. Adv. Mater. 2020, 32, 2001114. [Google Scholar] [CrossRef] [PubMed]
- Miskin, M.Z.; Cortese, A.J.; Dorsey, K.; Esposito, E.P.; Reynolds, M.F.; Liu, Q.; Cao, M.; Muller, D.A.; McEuen, P.L.; Cohen, I. Electronically integrated, mass-manufactured, microscopic robots. Nature 2020, 584, 557–561. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Abbott, J.J.; Dong, L.; Kratochvil, B.E.; Bell, D.; Nelson, B.J. Artificial bacterial flagella: Fabrication and magnetic control. Appl. Phys. Lett. 2009, 94, 064107. [Google Scholar] [CrossRef]
- Huang, H.W.; Sakar, M.S.; Petruska, A.J.; Pané, S.; Nelson, B.J. Soft micromachines with programmable motility and morphology. Nat. Commun. 2016, 7, 12263. [Google Scholar] [CrossRef] [PubMed]
- Zeeshan, M.A.; Grisch, R.; Pellicer, E.; Sivaraman, K.M.; Peyer, K.E.; Sort, J.; Özkale, B.; Sakar, M.S.; Nelson, B.J.; Pané, S. Hybrid Helical Magnetic Microrobots Obtained by 3D Template-Assisted Electrodeposition. Small 2014, 10, 1284–1288. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Lin, D.; Zhou, Y.; Jiao, N.; Tung, S.; Liu, L. Multistimuli-Responsive Hydroplaning Superhydrophobic Microrobots with Programmable Motion and Multifunctional Applications. ACS Nano 2022, 16, 14895–14906. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Go, G.; Ko, S.Y.; Park, J.O.; Park, S. Magnetic actuated pH-responsive hydrogel-based soft micro-robot for targeted drug delivery. Smart Mater. Struct. 2016, 25, 027001. [Google Scholar] [CrossRef]
- Zhou, H.; Mayorga-Martinez, C.C.; Pané, S.; Zhang, L.; Pumera, M. Magnetically Driven Micro and Nanorobots. Chem. Rev. 2021, 121, 4999–5041. [Google Scholar] [CrossRef] [PubMed]
- Xu, H.; Wu, S.; Liu, Y.; Wang, X.; Efremov, A.K.; Wang, L.; McCaskill, J.S.; Medina-Sánchez, M.; Schmidt, O.G. 3D nanofabricated soft microrobots with super-compliant picoforce springs as onboard sensors and actuators. Nat. Nanotechnol. 2024, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Hu, F.; Xue, Y.; Xu, J.; Lu, B. PEDOT-Based Conducting Polymer Actuators. Front. Robot. AI 2019, 6, 114. [Google Scholar] [CrossRef] [PubMed]
- Taccola, S.; Greco, F.; Sinibaldi, E.; Mondini, A.; Mazzolai, B.; Mattoli, V.; Taccola, S.; Greco, F.; Sinibaldi, E.; Mondini, A.; et al. Toward a New Generation of Electrically Controllable Hygromorphic Soft Actuators. Adv. Mater. 2015, 27, 1668–1675. [Google Scholar] [CrossRef]
- Tyagi, M.; Spinks, G.M.; Jager, E.W.H. 3d printing microactuators for soft microrobots. Soft Robot. 2021, 8, 19–27. [Google Scholar] [CrossRef]
- Taccola, S.; Greco, F.; Mazzolai, B.; Mattoli, V.; Jager, E.W.H. Thin film free-standing PEDOT:PSS/SU8 bilayer microactuators. J. Micromech. Microeng. 2013, 23, 117004. [Google Scholar] [CrossRef]
- Youn, J.H.; Jeong, S.M.; Hwang, G.; Kim, H.; Hyeon, K.; Park, J.; Kyung, K.U. Dielectric Elastomer Actuator for Soft Robotics Applications and Challenges. Appl. Sci. 2020, 10, 640. [Google Scholar] [CrossRef]
- Chen, Y.; Zhao, H.; Mao, J.; Chirarattananon, P.; Helbling, E.F.; Hyun, N.; Seung, P.; Clarke, D.R.; Wood, R.J. Controlled flight of a microrobot powered by soft artificial muscles. Nature 2019, 575, 324–329. [Google Scholar] [CrossRef]
- Yun, S.; Park, S.; Park, B.; Ryu, S.; Jeong, S.M.; Kyung, K.U. A soft and transparent visuo-haptic interface pursuing wearable devices. IEEE Trans. Ind. Electron. 2020, 67, 717–724. [Google Scholar] [CrossRef]
- Kim, S.; Kubicek, R.; Bergbreiter, S. 3D-Printed Electrostatic Microactuators for Flexible Microsystems. Adv. Funct. Mater. 2023, 33, 2304991. [Google Scholar] [CrossRef]
- Kim, S.; Velez, C.; Pierre, R.S.; Smith, G.L.; Bergbreiter, S. A Two-Step Fabrication Method for 3D Printed Microactuators: Characterization and Actuated Mechanisms. J. Microelectromechanical Syst. 2020, 29, 544–552. [Google Scholar] [CrossRef]
- Scalet, G. Two-Way and Multiple-Way Shape Memory Polymers for Soft Robotics: An Overview. Actuators 2020, 9, 10. [Google Scholar] [CrossRef]
- Sydney Gladman, A.; Matsumoto, E.A.; Nuzzo, R.G.; Mahadevan, L.; Lewis, J.A. Biomimetic 4D printing. Nat. Mater. 2016, 15, 413–418. [Google Scholar] [CrossRef] [PubMed]
- Jeske, M.P.; Zhang, W.; Anthamatten, M. Two–Photon Printing of Shape–Memory Microstructures and Metasurfaces via Radical–Mediated Thiol–Vinyl Hydrothiolation. Adv. Mater. Technol. 2022, 7, 2101725. [Google Scholar] [CrossRef]
- Zhao, F.; Rong, W.; Li, D.; Wang, L.; Sun, L. Four-dimensional design and programming of shape-memory magnetic helical micromachines. Appl. Mater. Today 2022, 27, 101422. [Google Scholar] [CrossRef]
- Chizari, S.; Shaw, L.A.; Hopkins, J.B. Simultaneous printing and deformation of microsystems: Via two-photon lithography and holographic optical tweezers. Mater. Horizons 2019, 6, 350–355. [Google Scholar] [CrossRef]
- Moran, J.L.; Posner, J.D. Phoretic Self-Propulsion. Annu. Rev. Fluid Mech. 2017, 49, 511–540. [Google Scholar] [CrossRef]
- María Hormigos, R.; Jurado Sánchez, B.; Escarpa, A. Multi-Light-Responsive Quantum Dot Sensitized Hybrid Micromotors with Dual-Mode Propulsion. Angew. Chem. Int. Ed. 2019, 58, 3128–3132. [Google Scholar] [CrossRef] [PubMed]
- Ceylan, H.; Yasa, I.C.; Sitti, M. 3D Chemical Patterning of Micromaterials for Encoded Functionality. Adv. Mater. 2017, 29, 1605072. [Google Scholar] [CrossRef] [PubMed]
- Chang, X.; Chen, C.; Li, J.; Lu, X.; Liang, Y.; Zhou, D.; Wang, H.; Zhang, G.; Li, T.; Wang, J.; et al. Motile Micropump Based on Synthetic Micromotors for Dynamic Micropatterning. ACS Appl. Mater. Interfaces 2019, 11, 28507–28514. [Google Scholar] [CrossRef] [PubMed]
- Maric, T.; Nasir, M.Z.M.; Webster, R.D.; Pumera, M. Tailoring Metal/TiO2 Interface to Influence Motion of Light-Activated Janus Micromotors. Adv. Funct. Mater. 2020, 30, 1908614. [Google Scholar] [CrossRef]
- Pourrahimi, A.M.; Villa, K.; Sofer, Z.; Pumera, M. Light-Driven Sandwich ZnO/TiO2/Pt Janus Micromotors: Schottky Barrier Suppression by Addition of TiO2 Atomic Interface Layers into ZnO/Pt Micromachines Leading to Enhanced Fuel-Free Propulsion. Small Methods 2019, 3, 1900258. [Google Scholar] [CrossRef]
- Peng, X.; Urso, M.; Ussia, M.; Pumera, M. Shape-Controlled Self-Assembly of Light-Powered Microrobots into Ordered Microchains for Cells Transport and Water Remediation. ACS Nano 2022, 16, 7615–7625. [Google Scholar] [CrossRef] [PubMed]
- Brooks, A.M.; Tasinkevych, M.; Sabrina, S.; Velegol, D.; Sen, A.; Bishop, K.J.M. Shape-directed rotation of homogeneous micromotors via catalytic self-electrophoresis. Nat. Commun. 2019, 10, 495. [Google Scholar] [CrossRef]
- Wang, J.; Wu, H.; Liu, X.; Liang, Q.; Bi, Z.; Wang, Z.; Cai, Y.; Dong, R. Carbon-Dot-Induced Acceleration of Light-Driven Micromotors with Inherent Fluorescence. Adv. Intell. Syst. 2020, 2, 1900159. [Google Scholar] [CrossRef]
- Kline, T.R.; Paxton, W.F.; Mallouk, T.E.; Sen, A.; Kline, T.R.; Paxton, W.F.; Mallouk, T.E.; Sen, A. Catalytic Nanomotors: Remote-Controlled Autonomous Movement of Striped Metallic Nanorods. Angew. Chem. Int. Ed. 2005, 44, 744–746. [Google Scholar] [CrossRef]
- Sridhar, V.; Yildiz, E.; Rodríguez-Camargo, A.; Lyu, X.; Yao, L.; Wrede, P.; Aghakhani, A.; Akolpoglu, B.M.; Podjaski, F.; Lotsch, B.V.; et al. Designing Covalent Organic Framework-Based Light-Driven Microswimmers toward Therapeutic Applications. Adv. Mater. 2023, 35, 2301126. [Google Scholar] [CrossRef]
- Dekanovsky, L.; Ying, Y.; Zelenka, J.; Plutnar, J.; Beladi-Mousavi, S.M.; Křížová, I.; Novotný, F.; Ruml, T.; Pumera, M. Fully Programmable Collective Behavior of Light-Powered Chemical Microrobotics: pH-Dependent Motion Behavior Switch and Controlled Cancer Cell Destruction. Adv. Funct. Mater. 2022, 32, 2205062. [Google Scholar] [CrossRef]
- Chen, S.; Yang, L.; Leung, F.K.C.; Kajitani, T.; Stuart, M.C.A.; Fukushima, T.; Van Rijn, P.; Feringa, B.L. Photoactuating Artificial Muscles of Motor Amphiphiles as an Extracellular Matrix Mimetic Scaffold for Mesenchymal Stem Cells. J. Am. Chem. Soc. 2022, 144, 3543–3553. [Google Scholar] [CrossRef]
- Zheng, Y.; Han, M.K.L.; Zhao, R.; Blass, J.; Zhang, J.; Zhou, D.W.; Colard-Itté, J.R.; Dattler, D.; Çolak, A.; Hoth, M.; et al. Optoregulated force application to cellular receptors using molecular motors. Nat. Commun. 2021, 12, 3580. [Google Scholar] [CrossRef]
- Baroncini, M.; Silvi, S.; Credi, A. Photo- And Redox-Driven Artificial Molecular Motors. Chem. Rev. 2020, 120, 200–268. [Google Scholar] [CrossRef]
- Corra, S.; Curcio, M.; Credi, A. Photoactivated Artificial Molecular Motors. JACS AU 2023, 3, 1301–1313. [Google Scholar] [CrossRef]
- Xu, F.; Feringa, B.L.; Xu, F.; Feringa, B.L. Photoresponsive Supramolecular Polymers: From Light-Controlled Small Molecules to Smart Materials. Adv. Mater. 2023, 35, 2204413. [Google Scholar] [CrossRef] [PubMed]
- Pfeifer, L.; Hoang, N.V.; Crespi, S.; Pshenichnikov, M.S.; Feringa, B.L. Dual-function artificial molecular motors performing rotation and photoluminescence. Sci. Adv. 2022, 8, 410. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Leung, F.K.C.; Stuart, M.C.A.; Kajitani, T.; Fukushima, T.; Van Der Giessen, E.; Feringa, B.L. Artificial muscle-like function from hierarchical supramolecular assembly of photoresponsive molecular motors. Nat. Chem. 2017, 10, 132–138. [Google Scholar] [CrossRef] [PubMed]
- Foy, J.T.; Li, Q.; Goujon, A.; Colard-Itté, J.R.; Fuks, G.; Moulin, E.; Schiffmann, O.; Dattler, D.; Funeriu, D.P.; Giuseppone, N. Dual-light control of nanomachines that integrate motor and modulator subunits. Nat. Nanotechnol. 2017, 12, 540–545. [Google Scholar] [CrossRef] [PubMed]
- Gao, C.; Vargas Jentzsch, A.; Moulin, E.; Giuseppone, N. Light-Driven Molecular Whirligig. J. Am. Chem. Soc. 2022, 144, 9845–9852. [Google Scholar] [CrossRef] [PubMed]
- Perrot, A.; Wang, W.Z.; Buhler, E.; Moulin, E.; Giuseppone, N. Bending Actuation of Hydrogels through Rotation of Light-Driven Molecular Motors. Angew. Chem. Int. Ed. 2023, 62, e202300263. [Google Scholar] [CrossRef] [PubMed]
- Ikejiri, S.; Takashima, Y.; Osaki, M.; Yamaguchi, H.; Harada, A. Solvent-Free Photoresponsive Artificial Muscles Rapidly Driven by Molecular Machines. J. Am. Chem. Soc. 2018, 140, 17308–17315. [Google Scholar] [CrossRef]
- Paulson, J.A.; Mesbah, A.; Zhu, X.; Molaro, M.C.; Braatz, R.D. Control of self-assembly in micro- and nano-scale systems. J. Process Control 2015, 27, 38–49. [Google Scholar] [CrossRef]
- Urso, M.; Pumera, M. Micro- and Nanorobots Meet DNA. Adv. Funct. Mater. 2022, 32, 2200711. [Google Scholar] [CrossRef]
- Mills, A.; Aissaoui, N.; Maurel, D.; Elezgaray, J.; Morvan, F.; Vasseur, J.J.; Margeat, E.; Quast, R.B.; Lai Kee-Him, J.; Saint, N.; et al. A modular spring-loaded actuator for mechanical activation of membrane proteins. Nat. Commun. 2022, 13, 3182. [Google Scholar] [CrossRef] [PubMed]
- Deluca, M.; Shi, Z.; Castro, C.E.; Arya, G. Dynamic DNA nanotechnology: Toward functional nanoscale devices. Nanoscale Horiz. 2020, 5, 182–201. [Google Scholar] [CrossRef]
- Lauback, S.; Mattioli, K.R.; Marras, A.E.; Armstrong, M.; Rudibaugh, T.P.; Sooryakumar, R.; Castro, C.E. Real-time magnetic actuation of DNA nanodevices via modular integration with stiff micro-levers. Nat. Commun. 2018, 9, 1446. [Google Scholar] [CrossRef] [PubMed]
- Maier, A.M.; Weig, C.; Oswald, P.; Frey, E.; Fischer, P.; Liedl, T. Magnetic Propulsion of Microswimmers with DNA-Based Flagellar Bundles. Nano Lett. 2016, 16, 906–910. [Google Scholar] [CrossRef]
- Yigit, B.; Alapan, Y.; Sitti, M.; Yigit, B.; Alapan, Y.; Sitti, M. Programmable Collective Behavior in Dynamically Self-Assembled Mobile Microrobotic Swarms. Adv. Sci. 2019, 6, 1801837. [Google Scholar] [CrossRef]
- Aubret, A.; Youssef, M.; Sacanna, S.; Palacci, J. Targeted assembly and synchronization of self-spinning microgears. Nat. Phys. 2018, 14, 1114–1118. [Google Scholar] [CrossRef]
- Singh, D.P.; Choudhury, U.; Fischer, P.; Mark, A.G. Non-Equilibrium Assembly of Light-Activated Colloidal Mixtures. Adv. Mater. 2017, 29, 1701328. [Google Scholar] [CrossRef]
- Schrage, M.; Medany, M.; Ahmed, D. Ultrasound Microrobots with Reinforcement Learning. Adv. Mater. Technol. 2023, 8, 2201702. [Google Scholar] [CrossRef]
- Wang, H.; Pumera, M. Coordinated behaviors of artificial micro/nanomachines: From mutual interactions to interactions with the environment. Chem. Soc. Rev. 2020, 49, 3211–3230. [Google Scholar] [CrossRef]
- Fusco, S.; Chatzipirpiridis, G.; Sivaraman, K.M.; Ergeneman, O.; Nelson, B.J.; Pané, S. Chitosan electrodeposition for microrobotic drug delivery. Adv. Healthc. Mater. 2013, 2, 1037–1044. [Google Scholar] [CrossRef] [PubMed]
- Lee, Y.-W.; Kim, J.-K.; Bozuyuk, U.; Dogan, N.O.; Turab, M.; Khan, A.; Shiva, A.; Wild, A.-M.; Sitti, M.; Lee, Y.-W.; et al. Multifunctional 3D-Printed Pollen Grain-Inspired Hydrogel Microrobots for On-Demand Anchoring and Cargo Delivery. Adv. Mater. 2023, 35, 2209812. [Google Scholar] [CrossRef]
- Aghakhani, A.; Yasa, O.; Wrede, P.; Sitti, M. Acoustically powered surface-slipping mobile microrobots. Proc. Natl. Acad. Sci. USA 2020, 117, 3469–3477. [Google Scholar] [CrossRef] [PubMed]
- Marco Den Hoed, F.; Ottomaniello, A.; Tricinci, O.; Ceseracciu, L.; Carlotti, M.; Raffa, P.; Mattoli, V.; Den Hoed, F.M.; Ottomaniello, A.; Tricinci, O.; et al. Facile Handling of 3D Two-Photon Polymerized Microstructures by Ultra-Conformable Freestanding Polymeric Membranes. Adv. Funct. Mater. 2023, 33, 2214409. [Google Scholar] [CrossRef]
- Huang, H.W.; Uslu, F.E.; Katsamba, P.; Lauga, E.; Sakar, M.S.; Nelson, B.J. Adaptive locomotion of artificial microswimmers. Sci. Adv. 2019, 5, eaau1532. [Google Scholar] [CrossRef]
- Isakova, A.; Novakovic, K. Oscillatory chemical reactions in the quest for rhythmic motion of smart materials. Eur. Polym. J. 2017, 95, 430–439. [Google Scholar] [CrossRef]
- Tamate, R.; Mizutani Akimoto, A.; Yoshida, R. Recent Advances in Self-Oscillating Polymer Material Systems. Chem. Rec. 2016, 16, 1852–1867. [Google Scholar] [CrossRef] [PubMed]
- Deng, F.; Feng, J.; Ding, T. Chemoplasmonic Oscillation: A Chemomechanical Energy Transducer. ACS Appl. Mater. Interfaces 2019, 11, 42580–42585. [Google Scholar] [CrossRef]
- Horváth, J. Chemomechanical oscillations with a non-redox non-oscillatory reaction. Chem. Commun. 2017, 53, 4973–4976. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Qian, H.; Yi, Y. Oscillations and multiscale dynamics in a closed chemical reaction system: Second law of thermodynamics and temporal complexity. J. Chem. Phys. 2008, 129, 154505. [Google Scholar] [CrossRef] [PubMed]
- Smith, G.L.; Tyler, J.B.; Lazarus, N.; Tsang, H.; Viornery, L.; Shultz, J.; Bergbreiter, S. Spider-Inspired, Fully 3D-Printed Micro-Hydraulics for Tiny, Soft Robotics. Adv. Funct. Mater. 2023, 33, 2207435. [Google Scholar] [CrossRef]
- Milana, E.; Bellotti, M.; Gorissen, B.; Qian, J.; De Volder, M.; Reynaerts, D. Shaping Soft Robotic Microactuators by Wire Electrical Discharge Grinding. Micromachines 2020, 11, 661. [Google Scholar] [CrossRef] [PubMed]
- Gorissen, B.; De Volder, M.; Reynaerts, D. Pneumatically-actuated artificial cilia array for biomimetic fluid propulsion. Lab Chip 2015, 15, 4348–4355. [Google Scholar] [CrossRef]
- Gorissen, B.; De Volder, M.; Reynaerts, D. Chip-on-tip endoscope incorporating a soft robotic pneumatic bending microactuator. Biomed. Microdevices 2018, 20, 73. [Google Scholar] [CrossRef]
- Mazzotta, A.; Mattoli, V. Ultrathin Conformable Electronic Tattoo for Tactile Sensations. Adv. Electron. Mater. 2023, 9, 2201327. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technique | Type | Suitable Materials | Resolution | Printing Speed | References |
|---|---|---|---|---|---|
| Stereolithography | UV-photopolymerization | Cross-linkable monomers, silicone, biodegradable materials | 5–50 μm | Scanning: 100 mm/s | [15] |
| Digital light processing | Masked UV-polymerization | Cross-linkable monomers | 1–50 μm | 70–100 mm/h | [16,17] |
| Continuous liquid interface production | UV-polymerization with oxygen permeable window | Low viscosity photoresists | 70 | 500 mm/h | [16,18] |
| Tomographic volumetric stereolithography | Dynamically evolving light beam around revolving resist | High viscosity, UV transparent photoresist | 80–300 | 105 mm3/h | [19,20] |
| Laser-induced forward transfer | Pulsed laser forced transfer of ink | Metals, polymeric, biomaterial, hydrogels | 10 μm | - | [21,22] |
| Selective laser sintering | Laser induced heating | Metal, ceramic, polynipam, polycaprolactone | 5 μm | 60 mm3/h | [23,24] |
| Two-photon lithography | Double NIR photon absorption | Photopolymerizable materials or positive resists | 100 nm (20 nm with OFB) | Scanning: 100–625 mm/s | [25,26,27] |
| Inkjet printing | Droplets with dispersed nanoparticles deposition | Conductive, insulating piezoelectric, polymeric | 50 μm | Scanning: 8 m/s | [28,29] |
| Micro-extrusion | Continuous material deposition | Hydrogels, polymeric materials, PDMS | 150 μm | 5 mm/s | [30] |
| Two-step absorption | UV-polymerization | Photopolymerizable materials | 100 nm | Scanning: 4 mm/s 1 | [31] |
| Multi-color two step | Volumetric printing by double beam activation | Photopolymerizable materials | 0.5–1 μm | 7 × 106 μm3/s | [32] |
| PI free polymerization | Deep-UV absorption by acrylates | Acrylates | - | - | [33] |
| Material | Stress Generated | Young’s Modulus | Response Frequency | Activation Stimuli | Actuation Type |
|---|---|---|---|---|---|
| LCE | 0.01–0.1 MPa | 1–80 MPa | 1–100 Hz | Heat Light Swell Chemical | Anisotropic shape change |
| (ionic & non ionic) Hydrogel | 0.1–10 MPa | 0.01–5 MPa | 1–10 Hz | Heat Light Swell Redox pH chemical Electric field | Isotropic shape change |
| Magnetic composite | Dependent on the filler | Dependent on the matrix | (20 µm s−1) (1–10 Hz) | Magnetic field | Independent motion, (multi-)directional shape change, rotatory motion |
| Auto-phoretic micro motors | --- | 200–300 GPa | (20 µm s−1) (0.1–0.5 Hz) | Chemical Light Redox | Unidirectional propulsion, rotatory motion |
| Not yet established in microrobotics | |||||
| (two-way) SMA | 200 MPa | 200 GPa | Up to 100 Hz | Heat (Joule heating) | Directional shape change |
| (two-way) SMP | 0.1–1 MPa | 20–50 MPa | <1 Hz | Heat | (multi-) directional shape change |
| Molecular motors | (3 kW mol−1) | --- | <10 Hz | Light | Rotatory motion |
| DNA self assemblies | --- | --- | <1 Hz | Light chemical | Bending motion Anistropic shape change |
| Electrode + Material systems | |||||
| Conductive polymers (component) | 10–50 MPa | --- | Up to 1 kHz | Charge Current Redox | Bending motion |
| Dielectric Elastomer Actuators (component) | 20 MPa | --- | Up to 10 kHz | Electric field | Anisotropic shape change |
| Ionic polymer actuators (component) | --- | --- | <10 Hz | Electric field | Bending motion |
| Hydraulic | --- | --- | ---- | Pressure | Shape change (extension) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
den Hoed, F.M.; Carlotti, M.; Palagi, S.; Raffa, P.; Mattoli, V. Evolution of the Microrobots: Stimuli-Responsive Materials and Additive Manufacturing Technologies Turn Small Structures into Microscale Robots. Micromachines 2024, 15, 275. https://doi.org/10.3390/mi15020275
den Hoed FM, Carlotti M, Palagi S, Raffa P, Mattoli V. Evolution of the Microrobots: Stimuli-Responsive Materials and Additive Manufacturing Technologies Turn Small Structures into Microscale Robots. Micromachines. 2024; 15(2):275. https://doi.org/10.3390/mi15020275
Chicago/Turabian Styleden Hoed, Frank Marco, Marco Carlotti, Stefano Palagi, Patrizio Raffa, and Virgilio Mattoli. 2024. "Evolution of the Microrobots: Stimuli-Responsive Materials and Additive Manufacturing Technologies Turn Small Structures into Microscale Robots" Micromachines 15, no. 2: 275. https://doi.org/10.3390/mi15020275