2.1. Structure and Angle Measurement Method of Level
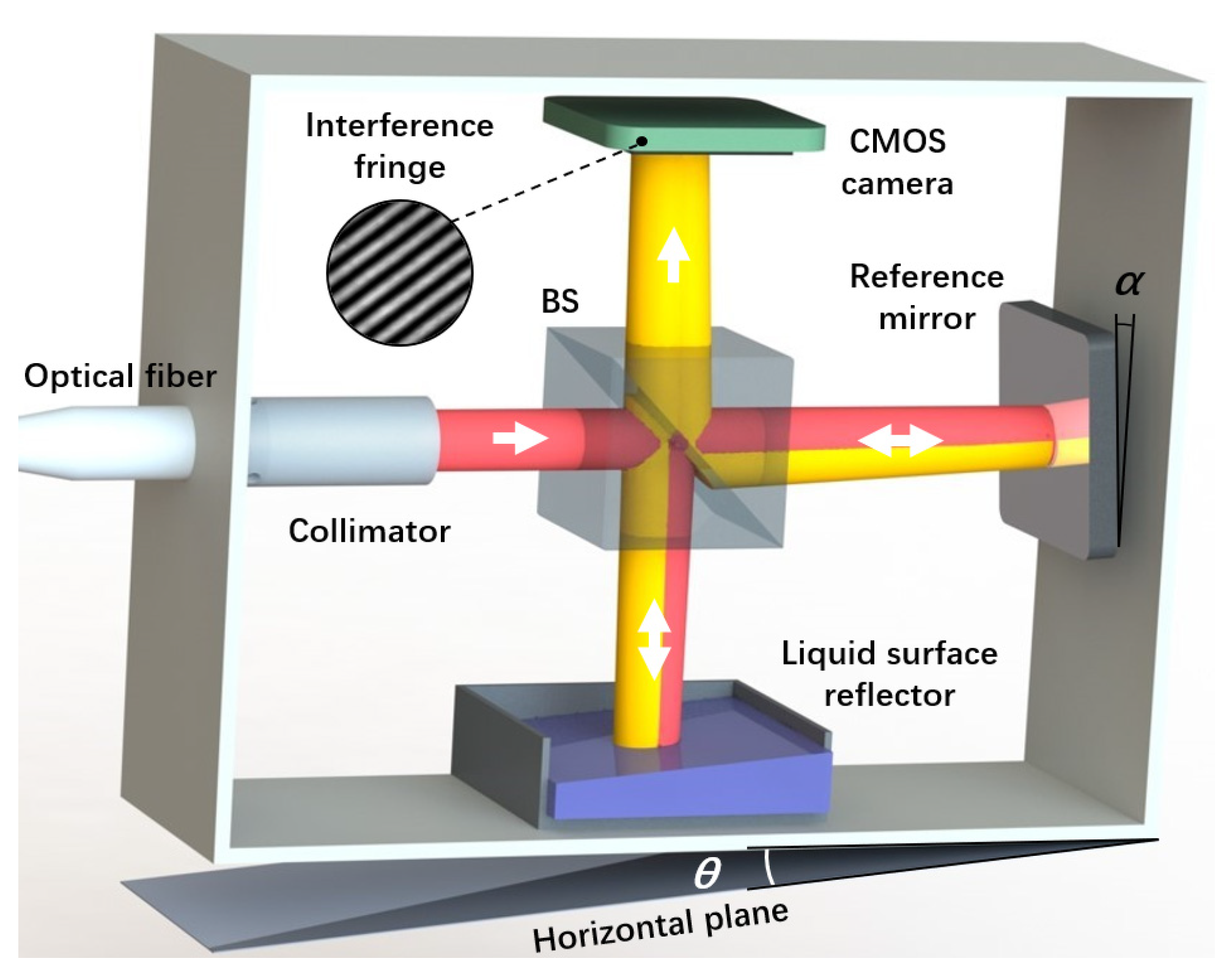
The optical structure of the level is shown in
Figure 1. The level utilizes a He–Ne frequency-stabilized laser as the light source, silicone oil as the liquid mirror, a flat mirror as the reference mirror, and a complementary metal-oxide semiconductor (CMOS) industrial camera as the detector for receiving the interference signal. The laser is connected to the level through an optical fiber and emits a beam of linearly polarized light through a collimator in the level. The polarized light is split into two beams by a beam splitter (BS). One beam is the reference light, which is successively reflected by the reference mirror (Mr) and the BS before being received by the camera. The other beam is the measurement light, which is reflected by the liquid mirror and then transmitted through the BS before being received by the camera. In this system, the reference mirror has an initial angle
α, which introduces an optical path difference and forms the interference fringes on the camera’s receiving surface. This is the basis for angle measurement in the level. Since the reflectivity of the silicone-oil surface is only 3%, the reflectivity of the selected reference mirror is also set to be about 3% to allow the interference fringes to have a high contrast. In addition, the selected CMOS camera has a high sensitivity, so the intensity of the light reflected by the silicone oil and the reference mirror can satisfy the measurement requirements. When the level undergoes a certain angular deviation, the optical path difference between the reference light and the measurement light changes, resulting in variations in the interference fringes.
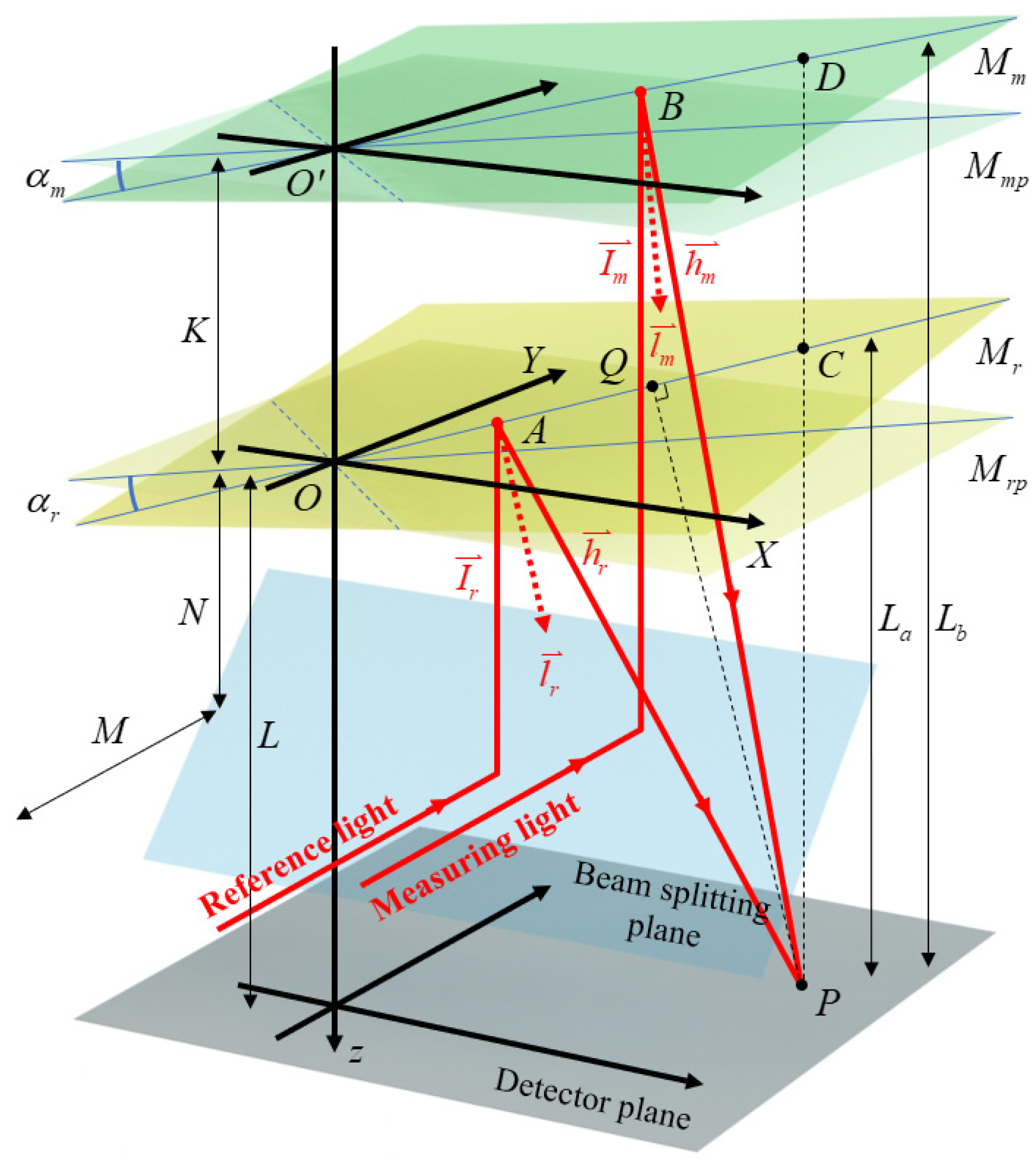
To accurately establish the relationship between variations in interference fringes and the measured angle, we employ vector-based beam tracing and analyze the system accordingly.
Figure 2 depicts the beam-tracing model. To facilitate calculation, the reference path is mirror-symmetric, with the beam-splitter plane as the center, so that it is in the same direction as the measuring path. After being reflected by the beam-splitter plane, the reference light and the measurement light intersect with the reference mirror and the measurement mirror at A (
a,
b,
c) and B (
d,
e,
f), respectively. The two beams eventually intersect at P (
x,
y,
L) on the detector plane.
Mrp and
Mmp represent the ideal positions of the reference mirror and the measurement mirror, respectively, while
αr and
αm denote the angular deviations of their actual positions. L represents the distance between the detector plane and the ideal position of the reference mirror, and K denotes the distance between the ideal positions of the two mirrors.
is the normal vector of
Mr, and
αr is the initial declination angle of
Mr, where
. Then, the following relationship is satisfied:
Equation (1) shows that there is a correspondence between the deflection angle
αr and the normal vector of
Mr; thus,
Vrx and
Vry are used to approximately represent the deflection angles around the Y-axis and the X-axis, respectively. As shown in
Figure 2, the point O (
0,
0,
0) is the origin of the coordinate system, and C (
x,
y,
u) represents the projection of P onto the reference mirror.
La denotes the distance from P to C. According to the geometric relationships, the vector relationship can be obtained as
. Therefore, the following relationship can be derived:
Similarly, it can be inferred that the normal vector of the measurement mirror is
, and the vector relationship can be obtained as
.
Lb represents the distance from the interference point on the detector to the measurement mirror. Given that
O′ (0, 0, −
K) and
D (
x,
y,
v), the following relationship can be obtained:
M represents the distance from the light source to the beam-splitter plane, and
N denotes the distance from the beam-splitter plane to the ideal position of the reference mirror.
L′ is the distance between
A and
P. Therefore, the optical path of the reference light can be expressed as follows (the refractive index of air is n = 1):
To obtain the expression for c,
is used to represent the direction vector of the reference reflected light and
is used to represent the direction vector of the incident light ray. According to the law of reflection, it can be deduced that
,
. Consequently, the following relationship can be obtained:
According to Equations (7) and (8), the direction vector of the reference reflected light can be expressed as follows:
Because
and
, the expression for the vertical coordinate
c can be deduced as follows:
As shown in
Figure 2, because
and
, PQ is the perpendicular bisector of
. Consequently, it can be inferred that
forms an isosceles triangle, leading to
. Therefore, the optical path of the reference light is estimated as follows:
The optical path derivation of the measurement light is similar to that of the reference light.
L″ is the distance between
B and
P, and the optical path of the measurement light can be expressed as follows (the refractive index of air is n = 1):
Similarly, the direction vector
of the measured reflected light can be determined based on Equations (6) to (8), and the vertical coordinate
f of
B can be obtained based on the geometric relationships. Given that the point
O′ (0, 0, −
K) is known, the following relationship can be derived:
Since
, by simultaneously applying Equations (12) and (13), the optical path of the measurement light can be obtained as follows:
In summary, by combining Equations (11) and (12), the following relationship can be obtained:
According to the principle of interference, the condition for equal intensity of interference fringes at any two points
P1 (
x1,
y1) and
P2 (
x2,
y2) on the detector surface is that the difference in the optical path between the measurement light and the reference light at these two points is an integer multiple of the wavelength. Therefore, it can be concluded that
In the equation,
N is an integer, and Δ
L1 and Δ
L2 represent the path difference between the measurement light and the reference light at
P1 and
P2, respectively. Based on Equation (16), we can precisely determine the interference intensity at any point on the detector and analyze the interference fringes. Through the aforementioned modeling, it can be observed that variation in the interference signal’s pattern depends on the relative angle between the reference mirror and the measurement mirror. Although Equation (16) looks different from the expression of optical path difference in the level previously proposed by our team [
23], it is essentially the same. According to Equation (16), when N = 1 and
y1 =
y2, the frequency in the x direction can be determined as follows:
where
fx is the spatial frequency of the interference fringes in the vertical direction, and Δ
x is the fringe spacing in the horizontal direction. Similarly, the frequency in the
y direction can be obtained. In this case, the angles of the level around the
X-axis and the
Y-axis can be determined as follows:
2.2. High-Resolution-Angle-Decoupling Algorithm Based on Zoom FFT
From the results derived above, it can be seen that the frequency resolution obtained after solving the interference fringes in the proposed level directly determines the angle resolution. Therefore, the angle resolution of the level can be expressed as follows:
In the frequency-domain transformation, the frequency resolution Δ
f can be expressed as follows:
where
fs is the sampling frequency, and
N is the number of samples. According to Equations (19) and (20), we can derive the relationship between the angle resolution of the level, the size of camera pixels, and the number of pixels as follows:
where Δ
θ is the angle resolution,
dpix is the size of camera pixels, and
Nc is the number of pixels. The CMOS camera used in the proposed level has a pixel size of 4.5 μm and a pixel count of 1600. The laser wavelength used is 632.8 nm. According to Equation (21), the calculated angle resolution is only 9 arcsec.
Based on Equations (20) and (21), it is known that improving the angle resolution can be achieved by reducing the sampling frequency and increasing the number of samples. However, in the proposed level, the sampling frequency and sampling number directly correspond to the number and size of the pixels of the CMOS camera, and these two parameters are fixed and cannot be changed when the CMOS camera is selected. Therefore, it is impossible to improve the angle resolution by directly reducing the sampling frequency and increasing the sampling number.
In the level previously proposed by our team [
18], a zero-padding and curve-fitting algorithm was adopted. In this algorithm, the signal was first zero padded in the time domain, and then the padded signal was processed by means of FFT and fitting. Zero padding is equivalent to interpolating the signal in the frequency domain; thus, the frequency resolution was first improved, and then the angle resolution of the level was improved. However, increasing the number of interpolation points not only improves the resolution but also significantly increases the computational requirement of FFT and fitting, which occupies a large amount of computing resources. To achieve a more ideal angle resolution, it is necessary to increase the original data volume by hundreds of times and use a computer to solve the measured angle value offline. On the other hand, due to the limitation of circuit noise and the CMOS camera’s dark-field noise, the method becomes meaningless when the number of interpolation points is higher than a threshold. Therefore, the proposed level employs a decoupling algorithm based on zoom FFT in the signal processing unit to address this issue.
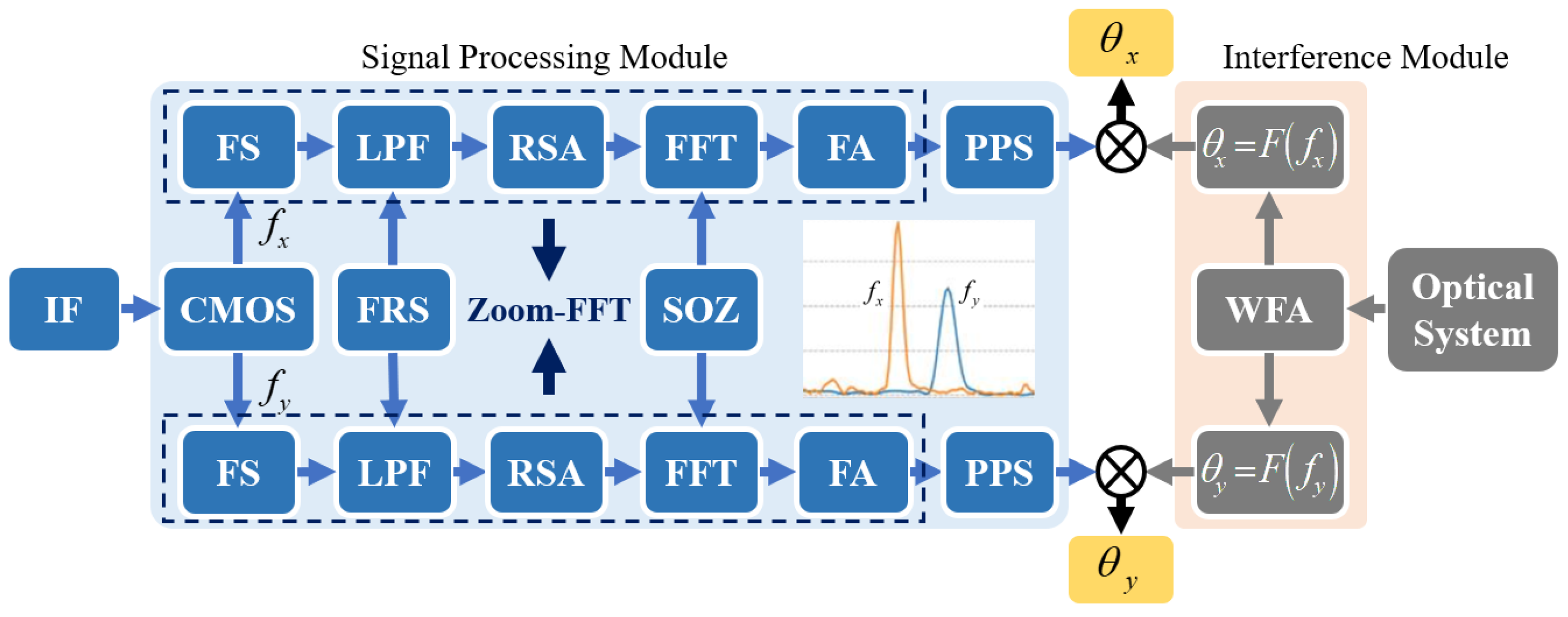
The signal processing module of the proposed level is shown in
Figure 3. After detecting the interference fringes using the CMOS camera, the frequencies of the fringes in the x and y directions can be obtained. The process from obtaining the interference fringe to obtaining the frequency signal is shown in
Figure 4.
The interference signal detected using the CMOS camera undergoes frequency shifting at first, which shifts the zero point of the signal spectrum to a frequency fe, thereby creating a new signal. fe is the frequency center of the frequency band of interest during the measurement process. For this level, the specific value of fe is often related to the initial deflection angle of the reference reflector. Before starting the measurement, the angle of the reference reflector needs to be adjusted to align the beams to generate the initial measurement interference fringes. Once the reference reflector is fixed, the value of fe is determined accordingly. The frequency band of interest during the measurement process manifests as the measurement range of the level. According to Equation (18), if the measurement range of the level is ±100 arcsec, the corresponding bandwidth of the interference signal is about 3.06 kHz.
After frequency shifting, the signal is low-pass filtered, and the cutoff frequency is denoted as
fc and is half the bandwidth of the interference signal. After low-pass filtering, the interference signal contains only the frequency information within the measurement range of the level, while high-frequency information is removed. The filtered signal is then resampled. The processed signal has its frequency centered around zero, and the frequency resolution can be improved by reducing the sampling frequency. The resampling frequency is determined as follows:
where
D is the multiple of refinement. According to the Nyquist sampling theorem, the sampling frequency should be at least twice the maximum frequency of the signal. Therefore, the relationship between the cutoff frequency of the low-pass filter and the sampling frequency is estimated using the following equation:
After resampling, zero padding is performed to maintain the total number of samples consistent with before. Then, an N-point FFT transformation is applied to the resampled data. After combining with Equation (20), we can determine the frequency resolution at this time as follows:
Next, FFT and frequency shifting are applied to the signal, and the frequency shift returns the signal to its original frequency. At this point, frequency refinement around the frequency
fe of the signal is realized. Finally, a peak-search algorithm is used to identify the peak points in the signal, and the corresponding angles can be determined based on the frequency of each peak point. According to the above derivation process, it can be concluded that the angle resolution at this time can be expressed as
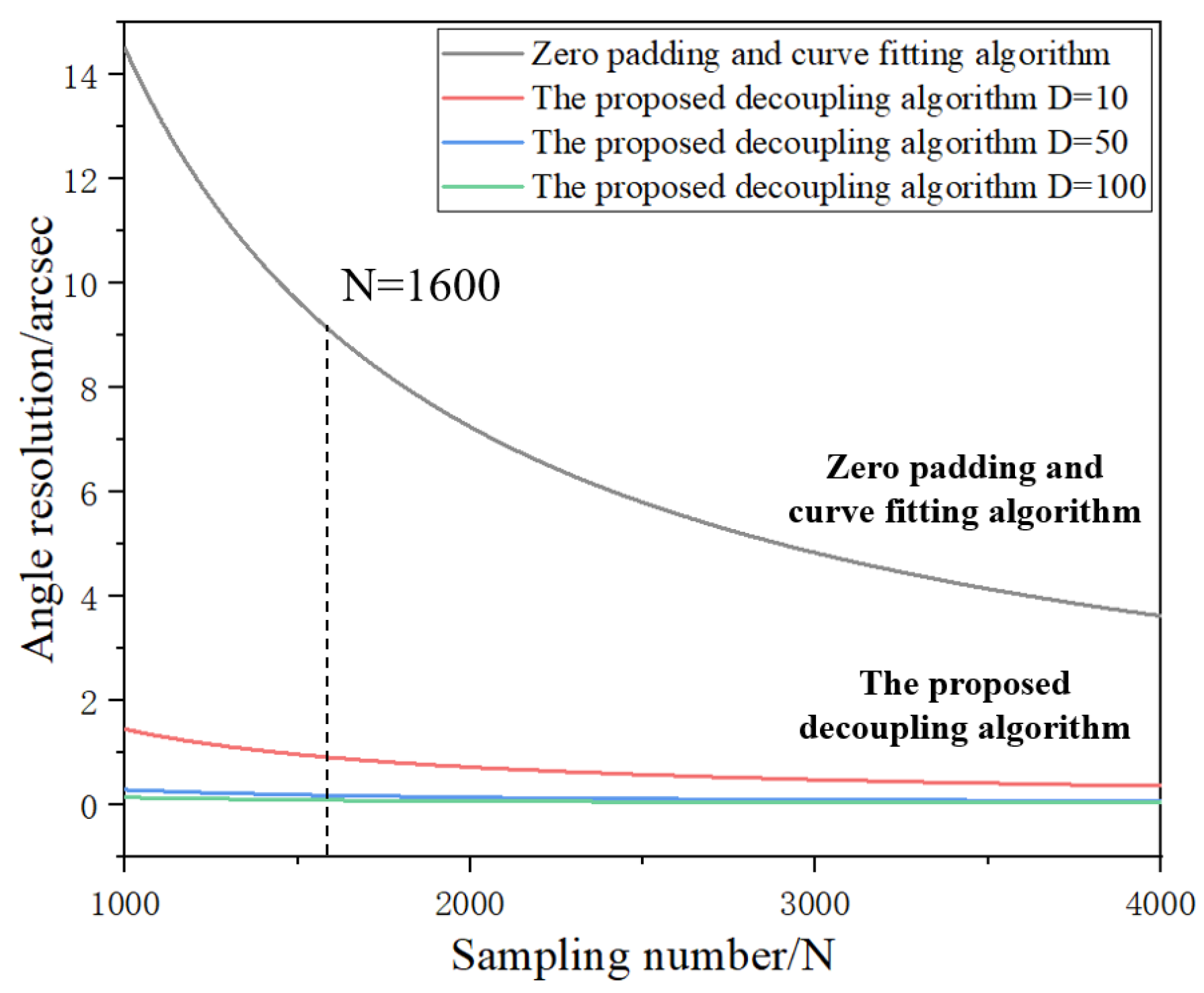
Figure 5 shows a comparison of the angle resolution obtained using the proposed algorithm and the zero-padding and curve-fitting algorithm, where
dpix is 4.5 μm,
Nc is 1600, and
λ is 632.8 nm. In the zero-padding and curve-fitting algorithm, the zero-padding operation on the signal is equivalent to increasing the number of sampling points. However, it can be seen from Equation (25) that the proposed decoupling algorithm can improve the angle resolution more effectively by changing the value of
D, while keeping the number of sampling points unchanged.
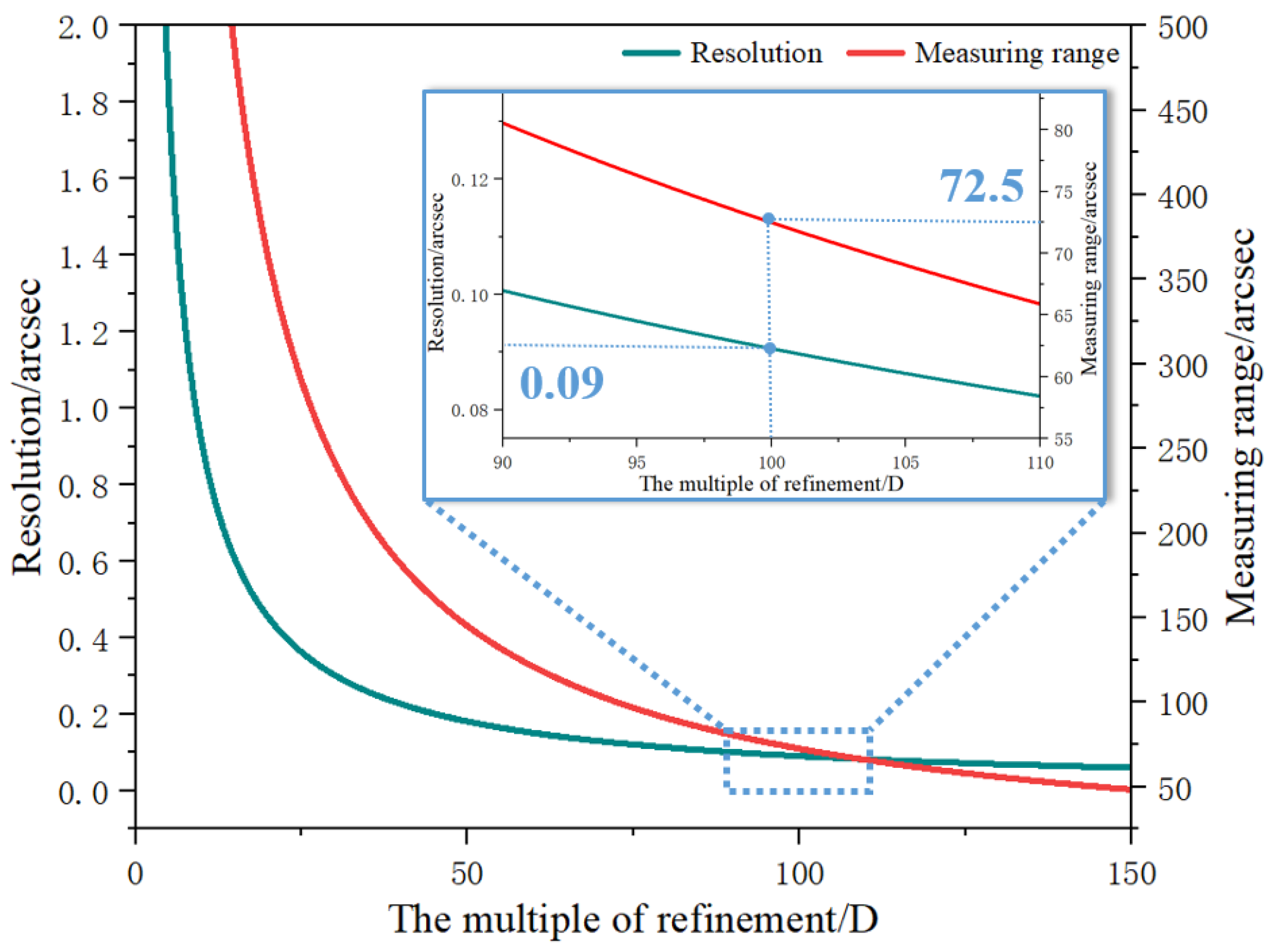
In addition, according to the above derivation, it can be concluded that the measurement range of the level decreases with an increase in the refinement multiple (D).
Figure 6 shows the relationship between angle resolution, measurement range, and the refinement multiple, where
dpix is 4.5 μm,
Nc is 1600, and
λ is 632.8 nm. When the value of D is set to 100 in the proposed level, the theoretical value of angle resolution is about 0.09 arcsec, and the measurement range of the level is only about ±72.5 arcsec. However, in an actual measurement scenario, the value of D is not set in stone and can be adjusted according to the measurement requirements.

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}