
Recent Advances in the Application of Piezoelectric Materials in Microrobotic Systems


1
Department of Mechanical Engineering, University of Vermont, 33 Colchester Ave., Burlington, VT 05405, USA
2
Department of Electrical and Biomedical Engineering, University of Vermont, 33 Colchester Ave., Burlington, VT 05405, USA
*
Author to whom correspondence should be addressed.
Micromachines 2022, 13(9), 1422; https://doi.org/10.3390/mi13091422
Submission received: 24 July 2022
/
Revised: 20 August 2022
/
Accepted: 23 August 2022
/
Published: 29 August 2022
(This article belongs to the Special Issue Piezoelectric MEMS/NEMS—Materials, Devices, and Applications)
Abstract
:Recent advances in precision manufacturing technology and a thorough understanding of the properties of piezoelectric materials have made it possible for researchers to develop innovative microrobotic systems, which draw more attention to the challenges of utilizing microrobots in areas that are inaccessible to ordinary robots. This review paper provides an overview of the recent advances in the application of piezoelectric materials in microrobots. The challenges of microrobots in the direction of autonomy are categorized into four sections: mechanisms, power, sensing, and control. In each section, innovative research ideas are presented to inspire researchers in their prospective microrobot designs according to specific applications. Novel mechanisms for the mobility of piezoelectric microrobots are reviewed and described. Additionally, as the piezoelectric micro-actuators require high-voltage electronics and onboard power supplies, we review ways of energy harvesting technology and lightweight micro-sensing mechanisms that contain piezoelectric devices to provide feedback, facilitating the use of control strategies to achieve the autonomous untethered movement of microrobots.
1. Introduction
In recent years, there has been an increasing effort to utilize piezoelectric materials in the development of microrobotic systems. With the growing number of mechanisms that scientists use to develop microrobots, there is a great challenge in designing lighter and more efficient microrobots to achieve a certain level of autonomy. Important reviews on microrobotics have been published with different focuses, such as micro-scale flapping-wing robots [1], biohybrid microrobots [2], light-powered microswimmers [3] and drug delivery microrobots [4], etc. Here, we summarize the recent application of piezoelectric materials for the development of microrobots in the direction of autonomy based on the areas corresponding to its basic challenges, including mechanism, power, sensing, and control.
Piezoelectric materials are widely employed in precision motion due to their distinctive advantages such as quick response, high displacement resolution, high stiffness, high actuating force, and little heat generation [5,6]. These features make piezoelectric materials good candidates for developing the actuating module of microrobots. In 2006, Anton and Sodano [7] reviewed the literature (2003–2006) on power harvesting using piezoelectric materials for self-powered wireless sensor applications, and they updated their review with Safaei [8] to include the literature from 2008 to 2018. Moreover, Mahapatra et al. [9] reviewed the nanostructures of piezoelectric materials, manufacturing methods, and material-specific underpinning concepts. The application of piezoelectric actuators is discussed more specifically in areas such as medical and robotics engineering by Uchino [10]. In 2018, Shevtsov et al. [11] discussed the mathematical modeling, experimental techniques, and computer algorithms for piezoelectric generators. They included the particular effects of piezoceramics, such as the flexoelectric effect, and methods for defect identification. As piezoelectric materials development advanced, computational methods were proposed to contain certain phenomena, including rate-dependent switching in the micromechanical 3D finite element model [12].
The mechanism by which piezoelectric microrobots achieve mobility, as well as the environment in which they are expected to maneuver, are important in the development of microrobots. Each mechanism has specific characteristics suitable for an objective environment. Ambulatory locomotion gives the advantages of mobility on rough surfaces as opposed to the traditional wheeled mechanism [13]. Moreover, increasing the number of legs enables the system to be more robust due to the actuation failure [14]. The inchworm mechanism can gain control of the friction force by exploiting the squeeze film effect [15,16]. To create biologically-inspired flapping-wing microrobots like insects for exploration purposes, high-density actuation power [17] is required, which can be developed using piezoelectric materials. Additionally, amphibious microrobots are designed to conform to the multi-environment [18].
The key roles in the operation of the microrobot are the power source to achieve mobility and the way it is transferred to the microrobot. The piezoelectric materials that are used in microrobots require high input voltages, which can reach as high as 220 V [19], creating challenges for power transmission. As a promising strategy, there are a variety of methods based on energy harvesting in the direction of the wireless functionality of microrobots relying on piezoelectric actuation [20].
The sensing capabilities involve microrobots or piezo-based devices dealing with their environments to achieve autonomy like their biological counterparts, such as tactile sensing similar to that of nature-inspired insects [21]. Additionally, piezoelectric sensing is investigated in a range of fields such as detecting cracks [22] and human health monitoring [23], which could be used to inspire ideas for microrobotic applications.
The control strategy is essential for the microrobots to achieve stability and follow trajectories. Due to their lightweight and miniature sizes, microrobots are more sensitive to environmental disturbances. Researchers have attempted to address these challenges by adding dampers [24], taking into account the disturbances [25], and using adaptive, model-free MIMO, nonlinear, and spiking neural network control strategies [26,27,28,29,30]. Moreover, the augmentation of accurate sensors to the system helps enhance the stability control of the microrobot.
In this review, we intend to give an overview of the latest advances in the field of piezoelectric microrobots focusing on their innovation and limiting factors. Therefore, we present the up-to-date applications of piezoelectric mechanisms to the development of microrobots with a focus on power, sensing, and control, so as to recognize the challenges that need more consideration and contribute to the understanding, design, and fabrication of piezoelectric microrobots.
2. Movement Mechanism
For any specific application, choosing an appropriate type of microrobot is of great importance as they have limited capabilities so far. Several innovative piezoelectric mechanisms have been employed for the movement of microrobots. Here, we divide them into subcategories based on the principles that they use to achieve mobility. Figure 1 depicts the categories defined for microrobots.
2.1. Ambulatory Locomotion
One of the popular mechanisms is ambulatory locomotion. In 2006, Sahai et al. [13] proposed a 3 g crawling robot that resulted in three prototypes integrating the microtechnologies, as depicted in Figure 2a. Later in 2011, Hoffman and Wood [37] designed and fabricated a myriapod-like microrobot (Figure 2b) equipped with bimorph piezoelectric actuators that weighed 750 mg. This is the improved version of their centipede-inspired microrobot that features better stability. However, it has singularities, and the fabrication process is more complex than the previous version [38]. In 2010, Baisch et al. [35] developed the second generation Harvard Ambulatory MicroRobot (HAMR2) that is a biologically-inspired hexapod microrobot (Figure 2c); later in 2011, HAMR2 was improved into a lighter autonomous version, which is named HAMR3 [36], as shown in Figure 2d,e. Other features such as the robustness of this type of microrobot are discussed by Hoffman and Wood [14], who used redundancy to improve robustness in the case of a leg failure (Figure 2f). In 2014, Baisch et al. proposed the design (Figure 2g) and fabrication of the HAMR-VP [39] to reach a speed as high as biological insects of a similar size, enabling a maximum speed of 10.1 body length per second (440 mm/s). The ambulatory microrobots manufactured by Rios et al. [40] use bimorph piezoelectric benders and can reach a speed of 520 mm/s, as displayed in Figure 2h. Later, Hernando-García et al. [41] increased the maximum speed of such microrobots by comparing the standing and traveling types of wave-based locomotion mechanisms. In comparison, the traveling type of locomotion surpassed the standing type by reaching a terminal velocity of 14 body lengths per second. Moreover, legged microrobots could gain the advantage of a higher payload power ratio by using lead zirconate titanate (PZT)-based actuators [42].
Similar microrobots with a focus on the piezoelectric stick-slip motion are mathematically modeled [43], showing that increasing the friction constant results in a lower speed. Additionally, mechanisms were proposed to achieve the stick-slip motion by simultaneously provoking the perpendicular oscillators [44,45]. The ambulatory locomotion-based microrobots are robust to the failure of the individual actuator. However, enabling complex mechanical structures, assembling processes, and onboard electronics pose challenges to their locomotion abilities.
2.2. Friction-Based Locomotion
The inchworm microrobot is another type of piezoelectric microrobot that uses friction force to move. Itatsu et al. [15] proposed the use of the squeeze film effect to control the friction force in inchworm microrobots as depicted in Figure 3a. The principle of the inchworm microrobot achieving locomotion is illustrated in Figure 3b. The other ground microrobot that exploits friction to locomote is the rolling type microrobot, as shown in Figure 3c [46]. With a total weight of 640 mg and a velocity of 5.6 mm/s, this microrobot employing micro ultrasonic motors is capable of delivering 60 µNm of torque. Figure 3d shows a type of wireless piezoelectric microrobot [47] that utilizes traveling-wave actuation to move at a speed of 14 mm/s by using 50 V of power supply. Figure 3e demonstrates the quadruped microrobot [31] that uses the bending-bending mode of hybrid oscillation inspired by rowing and can reach a speed of 33.45 mm/s with a weight of 49.8 g. MagPier [48] is a wireless electromagnetic microrobot that uses piezoelectric for sliding actuation (Figure 3f). The friction-based locomotion mechanism benefits from the stability that it has, but the bumpy surface may affect its performance.
2.3. Flapping-Wing Locomotion
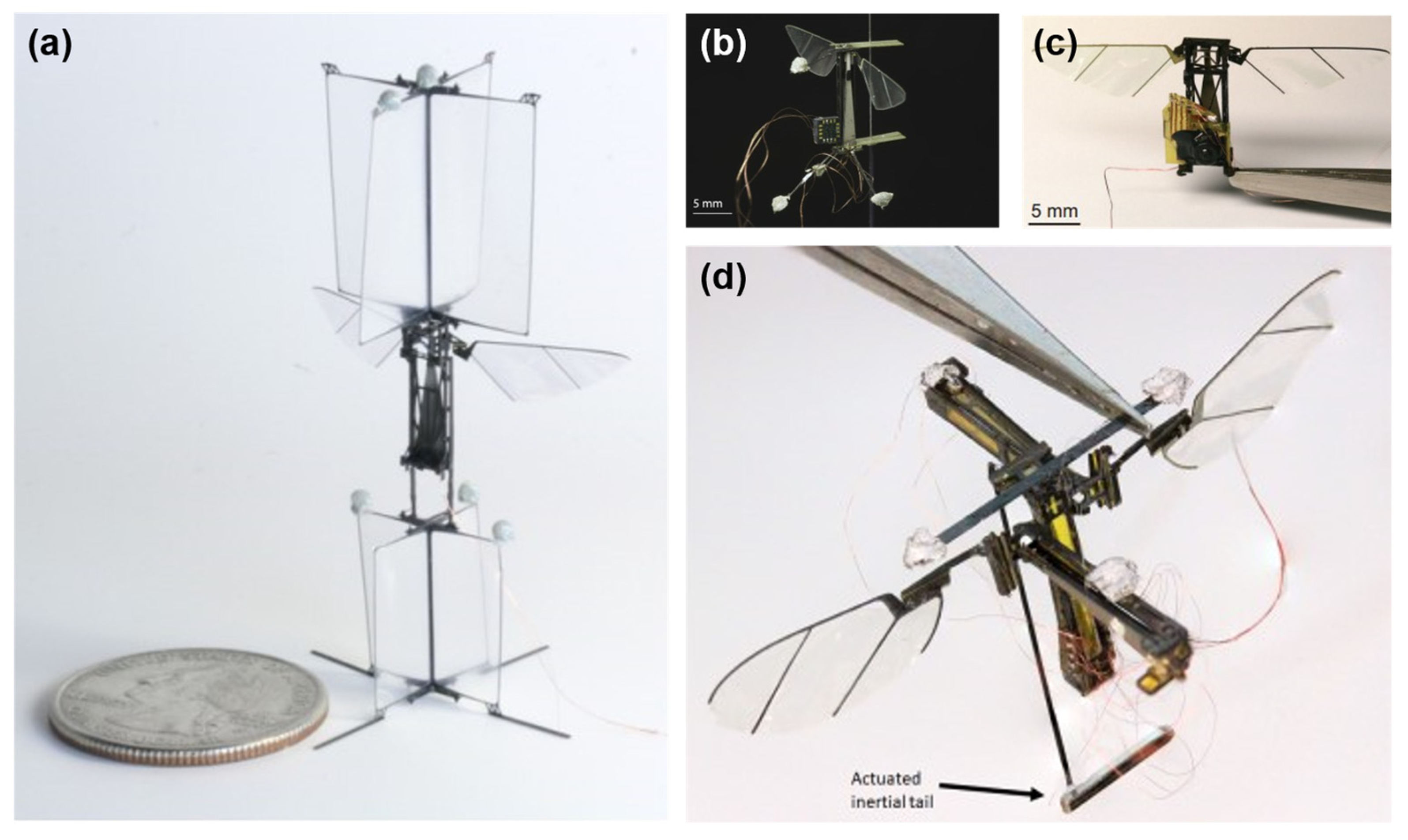
Another popular mechanism is the flapping-wing microrobot. Durán et al. [49] provided the modeling of piezoelectric actuators necessary for the control of the flapping-wing mechanism that needs high voltage drive electronics [50]. In 2012, Arabagi et al. [33] developed two prototypes of piezoelectric actuators that achieve a 3/8 lift-to-weight ratio (Figure 4a). Ma et al. [17] produced a piezoelectric with high power density for the 80 mg flapping-wing microrobot, capable of flight control, and Lok et al. [34] proposed a low-mass high-voltage drive for piezoelectric actuators with 290 mW power consumption and an overall weight of 70 mg for the RoboBee, which is displayed with its piezoelectric actuator in Figure 4b,c. Furthermore, Zou et al. [51] microfabricated an 84 mg flapping-wing microrobot (Figure 4d) by using a precision assembly of microsystems to achieve high performance. Moreover, a novel design for this concept is shown in Figure 4e, which is a micro aerial vehicle using the flapping-wing integrated within the quadrotor control strategy with a total weight of 247 mg [52]. Jafferis et al. [53] developed an X-wing micro aerial vehicle with lightweight power electronics to accomplish untethered flying via a photovoltaic array, which is shown in Figure 4f with its time-lapse and piezoelectric actuator displayed in Figure 4g,h, respectively. The challenges of achieving high-performance flapping-wing locomotion include developing efficient actuators with a high lift-to-weight ratio and handling the presence of air disturbances that make it difficult to stabilize the flying attitude. Despite these challenges, the advantage of flapping-wing locomotion is obvious: the movement of this type of microrobot is not hindered by ground obstacles.
2.4. Amphibious and Swimming Locomotion
There are other types of movement mechanisms that allow microrobots to operate in different environments. Becker et al. [18] developed a piezoelectric amphibious microrobot capable of locomotion in solid and liquid environments where their prototype, shown in Figure 5a, can reach a speed of 30 mm/s. Its zoomed view of semi-submerged parts is displayed in Figure 5b. Another example is RoboFly [54], which can fly and perform ground and water locomotion movements with a weight of 74 mg, depicted with its actuator in Figure 5c,d. Moreover, RoboFly can land from an unsteady flying position due to its low center of mass compared to its counterparts. There are other types of microrobots operable in liquid environments, such as the micro-robotic fish [32], as shown in Figure 5e. It is powered by bimorph piezoelectric actuators and can reach a speed of 45 mm/s with a weight of 1.93 g. Additionally, for biomedical applications, the magnetic piezoelectric microswimmers [55] have proved to be effective, as they can be powered by magnetic force and steered by piezoelectric polymer (Figure 5f). The amphibious microrobots will gain versatility while being restrained in any individual environment. Although swimming microrobots face the same issues as flying microrobots, they have advantages in various applications, such as biomedical drug delivery and sewer system monitoring. Table 1 gives an overview of the characteristics of the microrobots to provide a clear distinction among different designs.
3. Power Supply
Power source determination and electronics design for piezoelectric microrobots are major challenges in this field. Microrobots usually use wired power supplies at the preliminary stages of innovative mechanism development. However, in this section, we aim to provide a review of the recent technologies that could be used to give enough power for microrobots to move toward wireless autonomy.
In 2008, Karpelson et al. [19] summarized the research on power and actuation for flapping-wing microrobots. In this review, they noted that for sub 1 g micro air vehicles (MAV), a voltage ranging from 110 V to 220 V is needed to drive the piezoelectric bimorph cantilever, which can be exploited to enable 6.75 minutes of maximum flight time with a ten mAh of battery.
Energy harvesting could be another source of power supply for microrobots in the future. In 2011, Kim et al. [20] reviewed the performance and different ways in which piezoelectric materials can harvest energy based on vibrations. Pan et al. [57] used the piezoelectric polypeptide poly(γ-benzyl-L-glutamate) on the wings of the cicada shown in Figure 6a to verify their application and reached a power output of 138.42 pW for one fiber. The use of piezoelectric nanofibers is reviewed in [58], as shown in Figure 6b. You et al. [59] developed aligned P(VDF-TrFE) nanofibers displayed in Figure 6c, being capable of outputting a voltage of 12 V for potential self-powered devices. Moreover, different shapes of piezoelectric energy harvesters have been developed. For example, Kim and Yun proposed a helical piezoelectric capable of stretching up to 158% of its length [60] with a maximum output voltage of 20 V, and Beker et al. demonstrated a circular diaphragm of an aluminum nitride piezoelectric along with a concentric ring boss that can generate 1.3 µW of power (Figure 6d) [61]. Furthermore, there have been theoretical efforts to expand the bandwidth of piezoelectric vibration energy harvesters to absorb more power using nonlinear characteristics [62].
Additionally, nanogenerators could be used to harvest energy. In 2016, Li et al. [63,64] introduced the polypropylene ferroelectret to develop a biocompatible, flexible ferroelectret nanogenerator (FENG) that can be used as a dual-functional thin film and can reach a voltage of 50 V by hand pressing [65]. Furthermore, Cao et al. [66] discussed the capability of transferring energy from ferroelectret polymer to energy storage devices and developed a micro-robotic arm controlled by the movement of human fingers through combining the FENG with a VO2-based bimorph MEMS actuator [67].
For the wireless power transmission, James et al. [68] presented the first laser-powered micro aerial vehicle that needs the power of 200–300 mW and has previously been tethered due to its high voltage, as displayed in Figure 7a. Moreover, Jafferis et al. [53] used three solar light sources to power a 60 mg photovoltaic for an untethered flight of the flapping-wing MAV shown in Figure 7b. In 2021, Bunea et al. [3] reviewed light-powered microswimmers of soft-and hard-responsive types. In addition, the first application of radio frequency (RF) wireless power transfer in microrobots is presented in [69], which can power HAMR with a power requirement of 0.01–1 W (Figure 7c). Figure 7d demonstrates a magnetically actuated micro-swimming robot with 1.5 mT to reach a speed of 19.1 body length per second [56]. Furthermore, Wang and Zhang [70] reviewed the untethered-driven micro-or nanorobots, including their swarm behavior. In addition, there are some microrobots powered by novel methods, such as microswimmers that are powered by microalga [71]; a dandelion-inspired [72] wind-dispersed wireless device that carries solar cells; and a data transmission link that can generate 0.25 mW/mm2 (Figure 7e).
4. Sensing Capabilities
As the research interest in microrobotics grows, more sensing capabilities are needed to enable insect-like autonomous robots. In this section, we intend to discuss the research works that utilize piezoelectric devices for sensing in microrobotics and other related fields that could be beneficial for further improving the performance of microrobots. Figure 8 illustrates the classifications of sensing capabilities for microrobotic applications.
As for the piezoelectric sensors in microrobots, Fahlbusch and Fatikow [73] gave a preliminary overview of force sensing during manipulation in microrobotic systems. Tactile sensors inspired by insects such as spiders and geckos have been investigated by Koç and Akça [21]. In 2014, Lee et al. [74] fabricated a piezoelectric thin-film force sensor that can be used in biomedical applications. Adam et al. [75] developed a microrobot for various environments that has a micro-force sensing magnet. As it is challenging to develop a highly integrated sensing system for microrobots, Jayaram et al. [76] proposed a method to determine the velocity as a function of frequency and voltage in piezoelectric materials. Moreover, proprioceptive sensing in locomotion movement is presented by Doshi et al. [77]. In 2019, Chopra and Gravish [78] used the linear relationship of actuator displacement and voltages with an input of 25 V to 200 V to detect wing collision for flying robots. Furthermore, as vision is an important sensing ability in the environment for insect-sized microrobots, Iyer et al. [79] used a wireless steerable vision on a live beetle that is capable of streaming via Bluetooth radio. Moreover, Han et al. [80] reviewed triboelectric and piezoelectric sensors for displacement, pressure, and acceleration.
Various methods have been used to design piezoelectric sensors. Yamashita et al. [81] developed ultrasonic micro-sensors with PZT thin films and adjusted their resonance frequencies. Chen and Li [82] proposed a PZT-based self-sensing actuator capable of not only generating high-resolution displacement but also monitoring the dynamic characteristics of the mechatronic system. Self-powered piezoelectric materials are studied as both sensors and power generators [83]. In addition, micro-grippers that use micro-force sensors with cantilever structures using piezoelectric biomorphs were investigated [84]. A piezoelectric wireless micro-sensing accelerometer has been studied [85]. In 2017, Hosseini and Yousefi [86] examined the PVDF fabric with the control of crystalline phases for use in flexible force sensors. Hu et al. [87] enhanced piezoelectric sensing by using penetrated electrodes and nanoparticles. Cao et al. [88] used FENG to develop the self-powered bending sensors.
Moreover, piezoelectric materials can serve as integrated sensors for the structures of robotic systems, such as observing and detecting fatigue cracks [22], as well as identifying structural damage [89]. Moreover, piezoelectric materials have been used as a means of monitoring structural strength [90,91]. In 2010, Feng and Tsai [92] developed a new piezoelectric acoustic emission sensor with PVDF that has a wider bandwidth, and in 2020, Jiao et al. [93] gave a review on structure monitoring with piezoelectric sensing.
Additionally, piezoelectric sensors have been used for biomedical applications. Kalange and Gangal [94] utilized piezoelectric sensors to determine human pulse, and Kalantarian et al. [95] used them in a necklace to observe the eating habits, displayed in Figure 9a. Moreover, Figure 9b [96] shows a new device using piezoelectric sensors to measure heart rate by utilizing in-ear pressure data, and Zhou et al. [97] used piezoelectric ceramic to receive signals of sound. In 2018, Curry et al. [98] investigated a piezoelectric biodegradable device (shown in Figure 9c) to measure internal body pressure. As it is essential to have continuous data when sensors are related to vital health monitoring, a wireless self-powered piezoelectric sensor is introduced by Sun et al. (Figure 9d) [23].
There are other applications for piezoelectric sensors, such as using piezoelectric sensors as pressure sensors for obstacle avoidance in underwater vehicles [99], and using PXT/PVDF piezoelectric sensors on the racket for table tennis training purposes [100]. Table 2 provides a summary of the applications of the sensing capabilities of piezoelectric materials.
5. Control and Stability
Due to the instability of microrobots, controlling the system is of foremost importance. As flapping-wing microrobots have a higher number of DOFs, controlling them is more challenging. Figure 10 provides a summary of the techniques utilized in this section to achieve the stable control of the system.
Teoh et al. [24] stabilized the flying microrobot by adding an aerodynamic damper and used altitude control on the system by providing feedback with a tracking camera (Figure 11a). Moreover, Teoh and Wood [101] decoupled the control and power to create yaw and roll torques for attitude control by using a spherical four-bar linkage. In an effort to remove external devices for tracking trajectories, Helbling et al. [102] used an onboard magnetometer with a weight of 22 mg for angular feedback to control pitch and yaw (Figure 11b). Duhamel et al. [103] used an image sensor (model: Tam4 chip) to determine the altitude that is biologically inspired for the purpose of making an autonomous microrobot using the LTI system model (Figure 11c). Another type of vision used in flapping-wing microrobots is ocelli, which is inspired by insects and provides angular velocity in the feedback controller [104]. Moreover, different methods are used to control the flight of flapping-wing microrobots, such as adaptive control that is used to track trajectories as a type of lift control strategy [26,29,105]; model-free MIMO control that utilizes experimental methods to detect the behavior of the system, providing key factors for the development of the future model-based controller [27]; and spiking neural network control to mimic the behavior of the insect’s brain and consider the model uncertainties [28]. For enabling yaw control, Teoh and Wood [106] used the fruit fly control strategy that is also capable of creating roll torque by vibrating the hinge, while Chukewad and Fuller [107] utilized three innovative ways, including a novel design, employing wide actuators, and phase shifting on flapping-wing vehicles using a passive hinge. In 2017, Chen et al. [108] simulated the dynamics of flapping-wing microrobots on quadrotors to facilitate the application of control strategies, and Chirarattananon et al. [25] investigated flight control in the case of wind disturbances with prediction and compensation schemes. Moreover, to achieve better control capabilities, the piezoelectric tail has been utilized for fast inertial reorientation [109,110], as displayed in Figure 11d. Chen et al. [111] used soft artificial muscles to achieve open-loop stability and closed-loop flying while proposing solutions to the challenges of using soft actuators. In 2021, James and Fuller [112] provided an electronic high-voltage power source for flying insect microrobots to give the necessary torques and forces for the thrust of the control system.
Control strategies were also investigated on legged insect-scale robots. Ozcan et al. [113] controlled the lateral velocity and orientation of HAMR to follow trajectories and experimented with the maneuverability of the microrobot. Furthermore, Doshi et al. [114] made a model from the experimental data of HAMR and used an off-board phase detector to control the legs at their resonance frequency. Designing lightweight power electronics is a great challenge as well, which is investigated along with onboard straight line and high-speed running control [115].
Nonlinear control methods are effective in microrobots due to their high nonlinearities in the system. Karami et al. [30] designed an ant colony optimization-based optimal nonlinear control method for stick-slip microrobots and noted that a linear optimal PID controller does not provide adequate performance for the system. Additionally, nonlinear control methods have been employed for endovascular microrobots. For example, Arcese et al. [116] satisfied the stability with control Lyapunov functions by using a nonlinear adaptive control law for the magnetic microrobot, and in 2020, Pourmand and Sharifi [117] proposed a nonlinear adaptive sliding mode control method by using the Lyapunov theorem for assuring the stability of the system. In 2022, Jiang et al. [118] reviewed the control of microrobots and suggested that for the nonlinear control of systems with significant uncertainties; robust control methods, for example, control and sliding mode control; and for systems without a comprehensive model, nonlinear adaptive control strategies are appropriate. Additionally, Diller et al. [119] presented a method for the control of multiple agents individually using magnetic gradient pulling to follow 3-D trajectories. Yang and Zhang [120] reviewed the motion and control of magnetic microrobots and discussed the challenges of swarm control.
6. Conclusions
In this review, we summarize the recent advances in the application of piezoelectric materials in developing microrobots. A variety of mechanisms are presented with the details of the weight and speed they can reach. The microrobotic field is advancing toward making autonomous untethered microrobots where one challenge is to meet the high voltage requirement for piezoelectric actuators. Here, we review the methods of untethered mobility with power harvesting that would benefit the design of next-generation microrobots. Furthermore, for nature-inspired autonomy, the microrobots require adequate sensing and actuation to formulate a sense of the environment and incorporate control strategies to stabilize the system. Adding a sensor to the microrobot can significantly increase the weight of the robot. Therefore, we conduct reviews of practical approaches along with piezoelectric sensing and control methods to achieve stable orientations and accurate trajectories. As wireless power transmission technologies advance and the sensors become lighter and more accurate, by overcoming the design and fabrication challenges, untethered autonomous piezoelectric microrobots will gain more popularity.
Author Contributions
Writing—original draft preparation and figures preparation, A.F. and W.L.; writing-review and editing, T.X. and W.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Science Foundation EPSCoR Program (Award #2119485).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Farrell Helbling, E.; Wood, R.J. A review of propulsion, power, and control architectures for insect-scale flapping-wing vehicles. Appl. Mech. Rev. 2018, 70, 010801. [Google Scholar] [CrossRef]
- Alapan, Y.; Yasa, O.; Yigit, B.; Yasa, I.C.; Erkoc, P.; Sitti, M. Microrobotics and microorganisms: Biohybrid autonomous cellular robots. Annu. Rev. Control Rob. Auton. Syst. 2019, 2, 205–230. [Google Scholar] [CrossRef]
- Bunea, A.I.; Martella, D.; Nocentini, S.; Parmeggiani, C.; Taboryski, R.; Wiersma, D.S. Light—Powered Microrobots: Challenges and Opportunities for Hard and Soft Responsive Microswimmers. Adv. Intell. Syst. 2021, 3, 2000256. [Google Scholar] [CrossRef]
- Jang, D.; Jeong, J.; Song, H.; Chung, S.K. Targeted drug delivery technology using untethered microrobots: A review. J. Micromech. Microeng. 2019, 29, 053002. [Google Scholar] [CrossRef]
- Li, W.; Chen, X. Compensation of hysteresis in piezoelectric actuators without dynamics modeling. Sens. Actuators A 2013, 199, 89–97. [Google Scholar] [CrossRef]
- Li, W.; Chen, X.; Li, Z. Inverse compensation for hysteresis in piezoelectric actuator using an asymmetric rate-dependent model. Rev. Sci. Instrum. 2013, 84, 115003. [Google Scholar] [CrossRef] [PubMed]
- Anton, S.R.; Sodano, H.A. A review of power harvesting using piezoelectric materials (2003–2006). Smart Mater. Struct. 2007, 16, R1–R21. [Google Scholar] [CrossRef]
- Safaei, M.; Sodano, H.A.; Anton, S.R. A review of energy harvesting using piezoelectric materials: State-of-the-art a decade later (2008–2018). Smart Mater. Struct. 2019, 28, 113001. [Google Scholar] [CrossRef]
- Mahapatra, S.D.; Mohapatra, P.C.; Aria, A.I.; Christie, G.; Mishra, Y.K.; Hofmann, S.; Thakur, V.K. Piezoelectric Materials for Energy Harvesting and Sensing Applications: Roadmap for Future Smart Materials. Adv. Sci. 2021, 8, 2100864. [Google Scholar] [CrossRef]
- Uchino, K. Piezoelectric actuators 2006. J. Electroceram. 2008, 20, 301–311. [Google Scholar] [CrossRef]
- Shevtsov, S.N.; Soloviev, A.N.; Parinov, I.A.; Cherpakov, A.V.; Chebanenko, V.A. Piezoelectric Actuators and Generators for Energy Harvesting: Research and Development; Springer: Berlin/Heidelberg, Germany, 2018; p. 182. [Google Scholar]
- Arockiarajan, A.; Menzel, A.; Delibas, B.; Seemann, W. Computational modeling of rate-dependent domain switching in piezoelectric materials. Eur. J. Mech. -A/Solids 2006, 25, 950–964. [Google Scholar] [CrossRef]
- Sahai, R.; Avadhanula, S.; Groff, R.; Steltz, E.; Wood, R.; Fearing, R.S. Towards a 3g crawling robot through the integration of microrobot technologies. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 296–302. [Google Scholar]
- Hoffman, K.L.; Wood, R.J. Robustness of centipede-inspired millirobot locomotion to leg failures. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1472–1479. [Google Scholar]
- Itatsu, Y.; Torii, A.; Ueda, A. Inchworm type microrobot using friction force control mechanisms. In Proceedings of the 2011 International Symposium on Micro-NanoMechatronics and Human Science, Nagoya, Japan, 6–9 November 2011; pp. 273–278. [Google Scholar]
- Schindler, C.B.; Gomez, H.C.; Acker-James, D.; Teal, D.; Li, W.; Pister, K.S. 15 millinewton force, 1 millimeter displacement, low-power MEMS gripper. In Proceedings of the 2020 IEEE 33rd International Conference on Micro Electro Mechanical Systems (MEMS), Vancouver, BC, Canada, 18–22 January 2020; pp. 485–488. [Google Scholar]
- Ma, K.Y.; Chirarattananon, P.; Fuller, S.B.; Wood, R.J. Controlled flight of a biologically inspired, insect-scale robot. Science 2013, 340, 603–607. [Google Scholar] [CrossRef]
- Becker, F.; Zimmermann, K.; Volkova, T.; Minchenya, V.T. An amphibious vibration-driven microrobot with a piezoelectric actuator. Regul. Chaotic Dyn. 2013, 18, 63–74. [Google Scholar] [CrossRef]
- Karpelson, M.; Wei, G.-Y.; Wood, R.J. A review of actuation and power electronics options for flapping-wing robotic insects. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 779–786. [Google Scholar]
- Kim, H.S.; Kim, J.-H.; Kim, J. A review of piezoelectric energy harvesting based on vibration. Int. J. Precis. Eng. Manuf. 2011, 12, 1129–1141. [Google Scholar] [CrossRef]
- Koç, İ.M.; Akça, E. Design of a piezoelectric based tactile sensor with bio-inspired micro/nano-pillars. Tribol. Int. 2013, 59, 321–331. [Google Scholar]
- Ihn, J.-B.; Chang, F.-K. Detection and monitoring of hidden fatigue crack growth using a built-in piezoelectric sensor/actuator network: I. Diagnostics. Smart Mater. Struct. 2004, 13, 609. [Google Scholar] [CrossRef]
- Sun, R.; Carreira, S.C.; Chen, Y.; Xiang, C.; Xu, L.; Zhang, B.; Chen, M.; Farrow, I.; Scarpa, F.; Rossiter, J. Stretchable piezoelectric sensing systems for self-powered and wireless health monitoring. Adv. Mater. Technol. 2019, 4, 1900100. [Google Scholar] [CrossRef]
- Teoh, Z.E.; Fuller, S.B.; Chirarattananon, P.; Prez-Arancibia, N.; Greenberg, J.D.; Wood, R.J. A hovering flapping-wing microrobot with altitude control and passive upright stability. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 3209–3216. [Google Scholar]
- Chirarattananon, P.; Chen, Y.; Helbling, E.F.; Ma, K.Y.; Cheng, R.; Wood, R.J. Dynamics and flight control of a flapping-wing robotic insect in the presence of wind gusts. Interface Focus 2017, 7, 20160080. [Google Scholar] [CrossRef]
- Pérez-Arancibia, N.O.; Whitney, J.P.; Wood, R.J. Lift force control of flapping-wing microrobots using adaptive feedforward schemes. IEEE/ASME Trans. Mechatron. 2011, 18, 155–168. [Google Scholar] [CrossRef]
- Chirarattananon, P.; Ma, K.Y.; Wood, R.J. Adaptive control of a millimeter-scale flapping-wing robot. Bioinspir. Biomim. 2014, 9, 025004. [Google Scholar] [CrossRef]
- Pérez-Arancibia, N.O.; Duhamel, P.-E.J.; Ma, K.Y.; Wood, R.J. Model-free control of a hovering flapping-wing microrobot. J. Intell. Robot. Syst. 2015, 77, 95–111. [Google Scholar] [CrossRef]
- Clawson, T.S.; Ferrari, S.; Fuller, S.B.; Wood, R.J. Spiking neural network (SNN) control of a flapping insect-scale robot. In Proceedings of the 2016 IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 3381–3388. [Google Scholar]
- Chirarattananon, P.; Ma, K.Y.; Wood, R.J. Single-loop control and trajectory following of a flapping-wing microrobot. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–5 June 2014; pp. 37–44. [Google Scholar]
- Su, Q.; Quan, Q.; Deng, J.; Yu, H. A quadruped micro-robot based on piezoelectric driving. Sensors 2018, 18, 810. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Q.; Liu, S.; Chen, J.; He, G.; Di, J.; Zhao, L.; Su, T.; Zhang, M.; Hou, Z. Fast-moving piezoelectric micro-robotic fish with double caudal fins. Robot. Auton. Syst. 2021, 140, 103733. [Google Scholar] [CrossRef]
- Arabagi, V.; Hines, L.; Sitti, M. Design and manufacturing of a controllable miniature flapping wing robotic platform. Int. J. Robot. Res. 2012, 31, 785–800. [Google Scholar] [CrossRef]
- Lok, M.; Helbling, E.F.; Zhang, X.; Wood, R.; Brooks, D.; Wei, G.-Y. A low mass power electronics unit to drive piezoelectric actuators for flying microrobots. IEEE Trans. Power Electron. 2017, 33, 3180–3191. [Google Scholar] [CrossRef]
- Baisch, A.T.; Sreetharan, P.S.; Wood, R.J. Biologically-inspired locomotion of a 2g hexapod robot. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 5360–5365. [Google Scholar]
- Baisch, A.T.; Heimlich, C.; Karpelson, M.; Wood, R.J. HAMR3: An autonomous 1.7 g ambulatory robot. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 5073–5079. [Google Scholar]
- Hoffman, K.L.; Wood, R.J. Myriapod-like ambulation of a segmented microrobot. Auton. Robot. 2011, 31, 103–114. [Google Scholar] [CrossRef]
- Hoffman, K.L.; Wood, R.J. Towards a multi-segment ambulatory microrobot. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 1196–1202. [Google Scholar]
- Baisch, A.T.; Ozcan, O.; Goldberg, B.; Ithier, D.; Wood, R.J. High speed locomotion for a quadrupedal microrobot. Int. J. Robot. Res. 2014, 33, 1063–1082. [Google Scholar] [CrossRef]
- Rios, S.A.; Fleming, A.J.; Yong, Y.K. Miniature Resonant Ambulatory Robot. IEEE Robot. Autom. Lett. 2017, 2, 337–343. [Google Scholar] [CrossRef]
- Hernando-García, J.; García-Caraballo, J.L.; Ruiz-Díez, V.; Sánchez-Rojas, J.L. Comparative Study of Traveling and Standing Wave-Based Locomotion of Legged Bidirectional Miniature Piezoelectric Robots. Micromachines 2021, 12, 171. [Google Scholar] [CrossRef]
- Choi, J.; Shin, M.; Rudy, R.Q.; Kao, C.; Pulskamp, J.S.; Polcawich, R.G.; Oldham, K.R. Thin-film piezoelectric and high-aspect ratio polymer leg mechanisms for millimeter-scale robotics. Int. J. Intell. Robot. Appl. 2017, 1, 180–194. [Google Scholar] [CrossRef]
- Eigoli, A.K.; Vossoughi, G. Dynamic Modeling of Stick-Slip Motion in a Legged, Piezoelectric Driven Microrobot. Int. J. Adv. Rob. Syst. 2010, 7, 21. [Google Scholar] [CrossRef] [Green Version]
- Saadabad, N.A.; Moradi, H.; Vossoughi, G. Dynamic modeling, optimized design, and fabrication of a 2DOF piezo-actuated stick-slip mobile microrobot. Mech. Mach. Theory 2019, 133, 514–530. [Google Scholar] [CrossRef]
- Jalili, H.; Salarieh, H.; Vossoughi, G. Study of a piezo-electric actuated vibratory micro-robot in stick-slip mode and investigating the design parameters. Nonlinear Dyn. 2017, 89, 1927–1948. [Google Scholar] [CrossRef]
- Hutama, R.Y.; Khalil, M.M.; Mashimo, T. A Millimeter-Scale Rolling Microrobot Driven by a Micro-Geared Ultrasonic Motor. IEEE Robot. Autom. Lett. 2021, 6, 8158–8164. [Google Scholar] [CrossRef]
- Pan, C.H.; Tzou, S.S.; Shiu, R.Y. A novel wireless and mobile piezoelectric micro robot. In Proceedings of the 2010 IEEE International Conference on Mechatronics and Automation, Xi’an, China, 4–7 August 2010; pp. 1158–1163. [Google Scholar]
- Ivan, I.A.; Hwang, G.; Agnus, J.; Rakotondrabe, M.; Chaillet, N.; Régnier, S. First experiments on magpier: A planar wireless magnetic and piezoelectric microrobot. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 102–108. [Google Scholar]
- Durán, J.C.; Escareno, J.A.; Etcheverry, G.; Rakotondrabe, M. Getting started with peas-based flapping-wing mechanisms for micro aerial systems. Actuators 2016, 5, 14. [Google Scholar] [CrossRef]
- Karpelson, M.; Wei, G.-Y.; Wood, R.J. Driving high voltage piezoelectric actuators in microrobotic applications. Sens. Actuators A 2012, 176, 78–89. [Google Scholar] [CrossRef]
- Zou, Y.; Zhang, W.; Ke, X.; Lou, X.; Zhou, S. The design and microfabrication of a sub 100 mg insect-scale flapping-wing robot. Micro Nano Lett. 2017, 12, 297–300. [Google Scholar] [CrossRef]
- Jafferis, N.T.; Helbling, E.F.; Karpelson, M.; Wood, R.J. Untethered flight of an insect-sized flapping-wing microscale aerial vehicle. Nature 2019, 570, 491–495. [Google Scholar] [CrossRef]
- Zhou, S.; Zhang, W.; Zou, Y.; Ou, B.; Zhang, Y.; Wang, C. Piezoelectric-driven self-assembling micro air vehicle with bionic reciprocating wings. Electron. Lett. 2018, 54, 551–552. [Google Scholar] [CrossRef]
- Chukewad, Y.M.; James, J.; Singh, A.; Fuller, S. RoboFly: An Insect-Sized Robot With Simplified Fabrication That Is Capable of Flight, Ground, and Water Surface Locomotion. IEEE Trans. Robot. 2021, 37, 2025–2040. [Google Scholar] [CrossRef]
- Chen, X.-Z.; Liu, J.-H.; Dong, M.; Müller, L.; Chatzipirpiridis, G.; Hu, C.; Terzopoulou, A.; Torlakcik, H.; Wang, X.; Mushtaq, F. Magnetically driven piezoelectric soft microswimmers for neuron-like cell delivery and neuronal differentiation. Mater. Horiz. 2019, 6, 1512–1516. [Google Scholar] [CrossRef] [Green Version]
- Sui, F.; Huang, Y.; Guo, R.; Lin, L. Micro Swimming Robots Powered by a Single-Axis Alternating Magnetic Field with Controllable Manipulation. In Proceedings of the 2021 21st International Conference on Solid-State Sensors, Actuators and Microsystems (Transducers), Orlando, FL, USA, 20–24 June 2021; pp. 357–360. [Google Scholar]
- Pan, C.-T.; Yen, C.-K.; Lin, L.; Lu, Y.-S.; Li, H.-W.; Huang, J.C.-C.; Kuo, S.-W. Energy harvesting with piezoelectric poly(γ-benzyl-l-glutamate) fibers prepared through cylindrical near-field electrospinning. RSC Adv. 2014, 4, 21563. [Google Scholar] [CrossRef]
- Chang, J.; Dommer, M.; Chang, C.; Lin, L. Piezoelectric nanofibers for energy scavenging applications. Nano Energy 2012, 1, 356–371. [Google Scholar] [CrossRef]
- You, S.; Zhang, L.; Gui, J.; Cui, H.; Guo, S. A flexible piezoelectric nanogenerator based on aligned P (VDF-TrFE) nanofibers. Micromachines 2019, 10, 302. [Google Scholar] [CrossRef]
- Kim, M.; Yun, K.-S. Helical piezoelectric energy harvester and its application to energy harvesting garments. Micromachines 2017, 8, 115. [Google Scholar] [CrossRef]
- Beker, L.; Benet, A.; Meybodi, A.T.; Eovino, B.; Pisano, A.P.; Lin, L. Energy harvesting from cerebrospinal fluid pressure fluctuations for self-powered neural implants. Biomed. Microdevices 2017, 19, 32. [Google Scholar] [CrossRef]
- Qichang, Z.; Yang, Y.; Wei, W. Theoretical Study on Widening Bandwidth of Piezoelectric Vibration Energy Harvester with Nonlinear Characteristics. Micromachines 2021, 12, 1301. [Google Scholar] [CrossRef]
- Li, W.; Torres, D.; Wang, T.; Wang, C.; Sepúlveda, N. Flexible and biocompatible polypropylene ferroelectret nanogenerator (FENG): On the path toward wearable devices powered by human motion. Nano Energy 2016, 30, 649–657. [Google Scholar] [CrossRef]
- Li, W. Ferroelectret Nanogenerator (FENG) for Mechanical Energy Harvesting and Self-Powered Flexible Electronics. Ph.D. Thesis, Michigan State University, Ann Arbor, MI, USA, 2017. [Google Scholar]
- Li, W.; Torres, D.; Díaz, R.; Wang, Z.; Wu, C.; Wang, C.; Lin Wang, Z.; Sepúlveda, N. Nanogenerator-based dual-functional and self-powered thin patch loudspeaker or microphone for flexible electronics. Nat. Commun. 2017, 8, 15310. [Google Scholar] [CrossRef]
- Cao, Y.; Figueroa, J.; Pastrana, J.J.; Li, W.; Chen, Z.; Wang, Z.L.; Sepúlveda, N. Flexible Ferroelectret Polymer for Self-Powering Devices and Energy Storage Systems. ACS Appl. Mater. Interfaces 2019, 11, 17400–17409. [Google Scholar] [CrossRef]
- Cao, Y.; Figueroa, J.; Li, W.; Chen, Z.; Wang, Z.L.; Sepúlveda, N. Understanding the dynamic response in ferroelectret nanogenerators to enable self-powered tactile systems and human-controlled micro-robots. Nano Energy 2019, 63, 103852. [Google Scholar] [CrossRef]
- James, J.; Iyer, V.; Chukewad, Y.; Gollakota, S.; Fuller, S.B. Liftoff of a 190 mg laser-powered aerial vehicle: The lightest wireless robot to fly. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 3587–3594. [Google Scholar]
- Karpelson, M.; Waters, B.H.; Goldberg, B.; Mahoney, B.; Ozcan, O.; Baisch, A.; Meyitang, P.-M.; Smith, J.R.; Wood, R.J. A wirelessly powered, biologically inspired ambulatory microrobot. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–5 June 2014; pp. 2384–2391. [Google Scholar]
- Iyer, V.; Gaensbauer, H.; Daniel, T.L.; Gollakota, S. Wind dispersal of battery-free wireless devices. Nature 2022, 603, 427–433. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Zhang, L. External Power-Driven Microrobotic Swarm: From Fundamental Understanding to Imaging-Guided Delivery. ACS Nano 2021, 15, 149–174. [Google Scholar] [CrossRef]
- Yasa, O.; Erkoc, P.; Alapan, Y.; Sitti, M. Microalga-powered microswimmers toward active cargo delivery. Adv. Mater. 2018, 30, 1804130. [Google Scholar] [CrossRef]
- Fahlbusch, S.; Fatikow, S. Force sensing in microrobotic systems-an overview. In Proceedings of the 1998 IEEE International Conference on Electronics, Circuits and Systems. Surfing the Waves of Science and Technology (Cat. No. 98EX196), Lisboa, Portugal, 7–10 September 1998; pp. 259–262. [Google Scholar]
- Lee, J.; Choi, W.; Yoo, Y.K.; Hwang, K.S.; Lee, S.-M.; Kang, S.; Kim, J.; Lee, J.H. A micro-fabricated force sensor using an all thin film piezoelectric active sensor. Sensors 2014, 14, 22199–22207. [Google Scholar] [CrossRef] [PubMed]
- Adam, G.; Chowdhury, S.; Guix, M.; Johnson, B.V.; Bi, C.; Cappelleri, D. Towards functional mobile microrobotic systems. Robotics 2019, 8, 69. [Google Scholar] [CrossRef]
- Jayaram, K.; Jafferis, N.T.; Doshi, N.; Goldberg, B.; Wood, R.J. Concomitant sensing and actuation for piezoelectric microrobots. Smart Mater. Struct. 2018, 27, 065028. [Google Scholar] [CrossRef]
- Doshi, N.; Jayaram, K.; Castellanos, S.; Kuindersma, S.; Wood, R.J. Effective locomotion at multiple stride frequencies using proprioceptive feedback on a legged microrobot. Bioinspiration Biomim. 2019, 14, 056001. [Google Scholar] [CrossRef]
- Chopra, S.; Gravish, N. Piezoelectric actuators with on-board sensing for micro-robotic applications. Smart Mater. Struct. 2019, 28, 115036. [Google Scholar] [CrossRef]
- Iyer, V.; Najafi, A.; James, J.; Fuller, S.; Gollakota, S. Wireless steerable vision for live insects and insect-scale robots. Sci. Rob. 2020, 5, eabb0839. [Google Scholar] [CrossRef]
- Han, Z.; Jiao, P.; Zhu, Z. Combination of piezoelectric and triboelectric devices for robotic self-powered sensors. Micromachines 2021, 12, 813. [Google Scholar] [CrossRef] [PubMed]
- Yamashita, K.; Chansomphou, L.; Murakami, H.; Okuyama, M. Ultrasonic micro array sensors using piezoelectric thin films and resonant frequency tuning. Sens. Actuators A 2004, 114, 147–153. [Google Scholar] [CrossRef]
- Chen, X.; Li, W. A monolithic self-sensing precision stage: Design, modeling, calibration, and hysteresis compensation. IEEE/ASME Trans. Mechatron. 2014, 20, 812–823. [Google Scholar] [CrossRef]
- Ng, T.; Liao, W. Sensitivity analysis and energy harvesting for a self-powered piezoelectric sensor. J. Intell. Mater. Syst. Struct. 2005, 16, 785–797. [Google Scholar] [CrossRef]
- Huang, X.; Cai, J.; Wang, M.; Lv, X. A piezoelectric bimorph micro-gripper with micro-force sensing. In Proceedings of the 2005 IEEE International Conference on Information Acquisition, Hong Kong, China, 27 June 2005–3 July 2005; p. 5. [Google Scholar]
- Shen, Z.; Tan, C.Y.; Yao, K.; Zhang, L.; Chen, Y.F. A miniaturized wireless accelerometer with micromachined piezoelectric sensing element. Sens. Actuators A 2016, 241, 113–119. [Google Scholar] [CrossRef]
- Hosseini, S.M.; Yousefi, A.A. Piezoelectric sensor based on electrospun PVDF-MWCNT-Cloisite 30B hybrid nanocomposites. Org. Electron. 2017, 50, 121–129. [Google Scholar] [CrossRef]
- Hu, X.; Yan, X.; Gong, L.; Wang, F.; Xu, Y.; Feng, L.; Zhang, D.; Jiang, Y. Improved piezoelectric sensing performance of P (VDF–TrFE) nanofibers by utilizing BTO nanoparticles and penetrated electrodes. ACS Appl. Mater. Interfaces 2019, 11, 7379–7386. [Google Scholar] [CrossRef]
- Cao, Y.; Li, W.; Sepulveda, N. Performance of Self-Powered, Water-Resistant Bending Sensor Using Transverse Piezoelectric Effect of Polypropylene Ferroelectret Polymer. IEEE Sens. J. 2019, 19, 10327–10335. [Google Scholar] [CrossRef]
- Xu, D.; Cheng, X.; Huang, S.; Jiang, M. Identifying technology for structural damage based on the impedance analysis of piezoelectric sensor. Constr. Build. Mater. 2010, 24, 2522–2527. [Google Scholar] [CrossRef]
- Shin, S.W.; Qureshi, A.R.; Lee, J.-Y.; Yun, C.B. Piezoelectric sensor based nondestructive active monitoring of strength gain in concrete. Smart Mater. Struct. 2008, 17, 055002. [Google Scholar] [CrossRef]
- Chen, J.; Li, P.; Song, G.; Ren, Z. Piezo-based wireless sensor network for early-age concrete strength monitoring. Optik 2016, 127, 2983–2987. [Google Scholar] [CrossRef]
- Feng, G.-H.; Tsai, M.-Y. Acoustic emission sensor with structure-enhanced sensing mechanism based on micro-embossed piezoelectric polymer. Sens. Actuators A 2010, 162, 100–106. [Google Scholar] [CrossRef]
- Jiao, P.; Egbe, K.-J.I.; Xie, Y.; Matin Nazar, A.; Alavi, A.H. Piezoelectric sensing techniques in structural health monitoring: A state-of-the-art review. Sensors 2020, 20, 3730. [Google Scholar] [CrossRef] [PubMed]
- Kalange, A.; Gangal, S. Piezoelectric sensor for human pulse detection. Def. Sci. J. 2007, 57, 109. [Google Scholar] [CrossRef]
- Kalantarian, H.; Alshurafa, N.; Le, T.; Sarrafzadeh, M. Monitoring eating habits using a piezoelectric sensor-based necklace. Comput. Biol. Med. 2015, 58, 46–55. [Google Scholar] [CrossRef] [PubMed]
- Park, J.-H.; Jang, D.-G.; Park, J.W.; Youm, S.-K. Wearable sensing of in-ear pressure for heart rate monitoring with a piezoelectric sensor. Sensors 2015, 15, 23402–23417. [Google Scholar] [CrossRef]
- Zhou, P.; Yao, Z.; Ma, J.; Zhu, Z. A piezoelectric sensing neuron and resonance synchronization between auditory neurons under stimulus. Chaos Solitons Fractals 2021, 145, 110751. [Google Scholar] [CrossRef]
- Curry, E.J.; Ke, K.; Chorsi, M.T.; Wrobel, K.S.; Miller, A.N.; Patel, A.; Kim, I.; Feng, J.; Yue, L.; Wu, Q. Biodegradable piezoelectric force sensor. Proc. Natl. Acad. Sci. USA 2018, 115, 909–914. [Google Scholar] [CrossRef]
- Asadnia, M.; Kottapalli, A.G.P.; Shen, Z.; Miao, J.; Triantafyllou, M. Flexible and surface-mountable piezoelectric sensor arrays for underwater sensing in marine vehicles. IEEE Sens. J. 2013, 13, 3918–3925. [Google Scholar] [CrossRef]
- Tian, G.; Deng, W.; Gao, Y.; Xiong, D.; Yan, C.; He, X.; Yang, T.; Jin, L.; Chu, X.; Zhang, H. Rich lamellar crystal baklava-structured PZT/PVDF piezoelectric sensor toward individual table tennis training. Nano Energy 2019, 59, 574–581. [Google Scholar] [CrossRef]
- Teoh, Z.E.; Wood, R.J. A flapping-wing microrobot with a differential angle-of-attack mechanism. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 1381–1388. [Google Scholar]
- Helbling, E.F.; Fuller, S.B.; Wood, R.J. Pitch and yaw control of a robotic insect using an onboard magnetometer. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–5 June 2014; pp. 5516–5522. [Google Scholar]
- Duhamel, P.-E.J.; Pérez-Arancibia, N.O.; Barrows, G.L.; Wood, R.J. Altitude feedback control of a flapping-wing microrobot using an on-board biologically inspired optical flow sensor. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 4228–4235. [Google Scholar]
- Fuller, S.B.; Karpelson, M.; Censi, A.; Ma, K.Y.; Wood, R.J. Controlling free flight of a robotic fly using an onboard vision sensor inspired by insect ocelli. J. R. Soc. Interface 2014, 11, 20140281. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Teoh, Z.E.; Wood, R.J. A bioinspired approach to torque control in an insect-sized flapping-wing robot. In Proceedings of the 5th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, São Paulo, Brazil, 12–15 August 2014; pp. 911–917. [Google Scholar]
- Chukewad, Y.; Fuller, S. Yaw Control of a Hovering Flapping-Wing Aerial Vehicle With a Passive Wing Hinge. IEEE Rob. Autom. Lett. 2021, 6, 1864–1871. [Google Scholar] [CrossRef]
- Chen, Y.; Fuller, S.B.; Dantu, K. Quadrobee: Simulating flapping wing aerial vehicle dynamics on a quadrotor. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 5957–5964. [Google Scholar]
- Singh, A.; Libby, T.; Fuller, S.B. Rapid inertial reorientation of an aerial insect-sized robot using a piezo-actuated tail. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 4154–4160. [Google Scholar]
- Singh, A. Planar Aerial Reorientation of an Insect Scale Robot Using Piezo-Actuated Tail Like Appendage; University of Washington: Seattle, WA, USA, 2018. [Google Scholar]
- Chen, Y.; Zhao, H.; Mao, J.; Chirarattananon, P.; Helbling, E.F.; Hyun, N.-S.P.; Clarke, D.R.; Wood, R.J. Controlled flight of a microrobot powered by soft artificial muscles. Nature 2019, 575, 324–329. [Google Scholar] [CrossRef] [PubMed]
- James, J.; Fuller, S. A high-voltage power electronics unit for flying insect robots that can modulate wing thrust. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May 2021–5 June 2021; pp. 7212–7218. [Google Scholar]
- Ozcan, O.; Baisch, A.T.; Wood, R.J. Design and feedback control of a biologically-inspired miniature quadruped. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1438–1444. [Google Scholar]
- Doshi, N.; Jayaram, K.; Goldberg, B.; Wood, R.J. Phase control for a legged microrobot operating at resonance. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May 2017–3 June 2017; pp. 5969–5975. [Google Scholar]
- Goldberg, B.; Zufferey, R.; Doshi, N.; Helbling, E.F.; Whittredge, G.; Kovac, M.; Wood, R.J. Power and control autonomy for high-speed locomotion with an insect-scale legged robot. IEEE Rob. Autom. Lett. 2018, 3, 987–993. [Google Scholar] [CrossRef]
- Karami, M.; Tavakolpour-Saleh, A.R.; Norouzi, A. Optimal nonlinear PID control of a micro-robot equipped with vibratory actuator using ant colony algorithm: Simulation and experiment. J. Intell. Robot. Syst. 2020, 99, 773–796. [Google Scholar] [CrossRef]
- Arcese, L.; Fruchard, M.; Ferreira, A. Adaptive controller and observer for a magnetic microrobot. IEEE Trans. Robot. 2013, 29, 1060–1067. [Google Scholar] [CrossRef]
- Pourmand, M.J.; Sharifi, M. Navigation and control of endovascular helical swimming microrobot using dynamic programing and adaptive sliding mode strategy. In Control Systems Design of Bio-Robotics and Bio-Mechatronics with Advanced Applications; Elsevier: Amsterdam, The Netherlands, 2020; pp. 201–219. [Google Scholar]
- Jiang, J.; Yang, Z.; Ferreira, A.; Zhang, L. Control and autonomy of microrobots: Recent progress and perspective. Adv. Intell. Syst. 2022, 4, 2100279. [Google Scholar] [CrossRef]
- Diller, E.; Giltinan, J.; Sitti, M. Independent control of multiple magnetic microrobots in three dimensions. Int. J. Robot. Res. 2013, 32, 614–631. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, L. Motion control in magnetic microrobotics: From individual and multiple robots to swarms. Annu. Rev. Control Rob. Auton. Syst. 2021, 4, 509–534. [Google Scholar] [CrossRef]
Figure 1.
Categories defined for the movement mechanisms of microrobots. Reprinted with permission from Ref. [15]. Copyright 2011, IEEE. Reprinted with permission from Ref. [31]. Copyright 2018, MDPI. Reprinted with permission from Ref. [32]. Copyright 2021, Elsevier. Reprinted with permission from Ref. [18]. Copyright 2013, Springer. Reprinted with permission from Ref. [33]. Copyright 2012, SAGE. Reprinted with permission from Ref. [34]. Copyright 2017, IEEE. Reprinted with permission from Ref. [35]. Copyright 2010, IEEE. Reprinted with permission from Ref. [36]. Copyright 2011, IEEE.
Figure 1.
Categories defined for the movement mechanisms of microrobots. Reprinted with permission from Ref. [15]. Copyright 2011, IEEE. Reprinted with permission from Ref. [31]. Copyright 2018, MDPI. Reprinted with permission from Ref. [32]. Copyright 2021, Elsevier. Reprinted with permission from Ref. [18]. Copyright 2013, Springer. Reprinted with permission from Ref. [33]. Copyright 2012, SAGE. Reprinted with permission from Ref. [34]. Copyright 2017, IEEE. Reprinted with permission from Ref. [35]. Copyright 2010, IEEE. Reprinted with permission from Ref. [36]. Copyright 2011, IEEE.
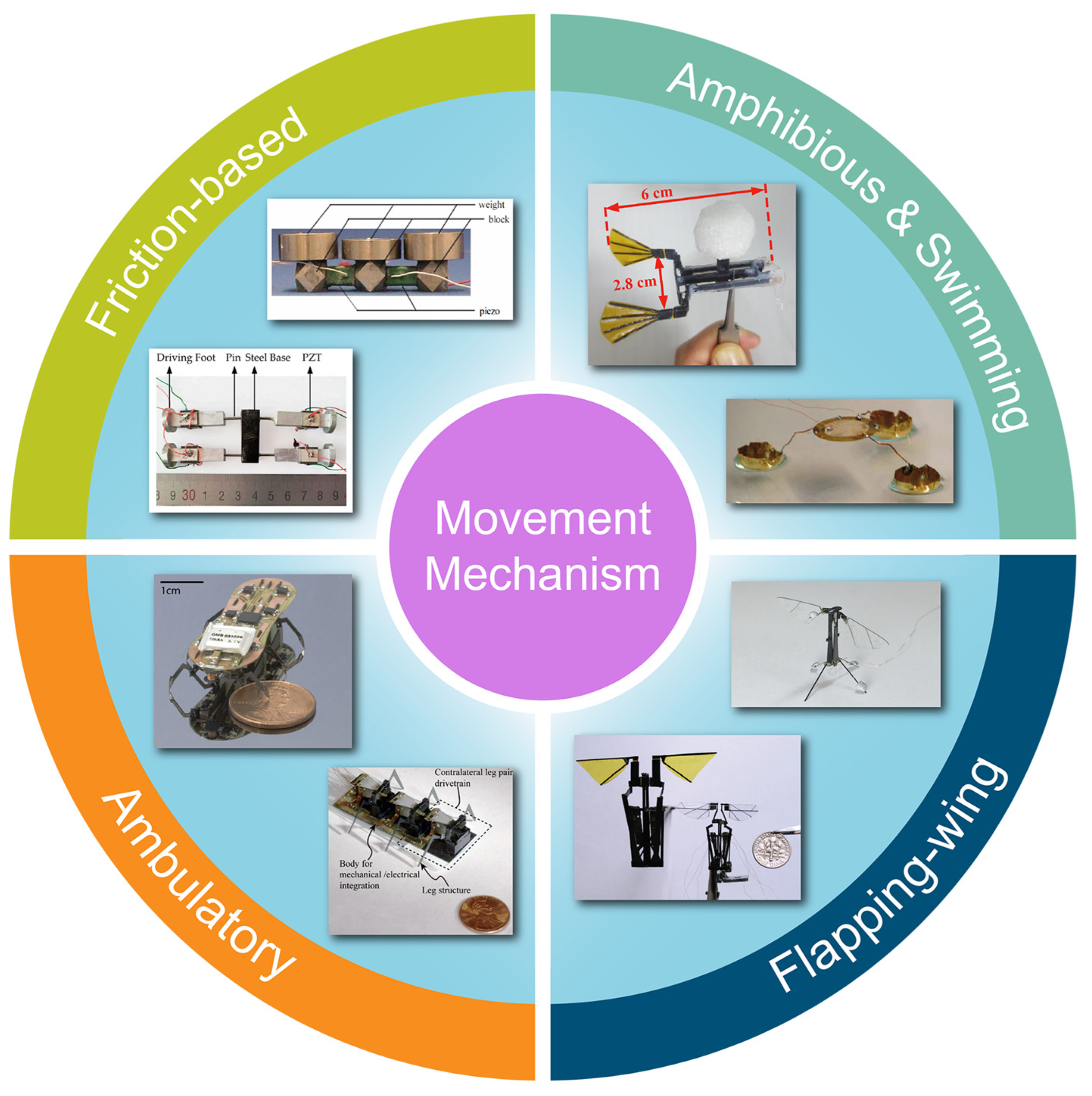
Figure 2.
(a) Crawler with zoomed-view of fibers in the feet. Reprinted with permission from Ref. [13]. Copyright 2006, IEEE. (b) Centipede-like microrobot. Reprinted with permission from Ref. [37]. Copyright 2011, Springer. (c) HAMR2. Reprinted with permission from Ref. [35]. Copyright 2010, IEEE. (d) Top-view and (e) bottom-view of HAMR3. Reprinted with permission from Ref. [36]. Copyright 2011, IEEE. (f) Centipede millirobot. Reprinted with permission from Ref. [14]. Copyright 2013, IEEE. (g) HAMR-VP. Reprinted with permission from Ref. [39]. Copyright 2014, SAGE. (h) MinRAR. Reprinted with permission from Ref. [40]. Copyright 2017, IEEE.
Figure 2.
(a) Crawler with zoomed-view of fibers in the feet. Reprinted with permission from Ref. [13]. Copyright 2006, IEEE. (b) Centipede-like microrobot. Reprinted with permission from Ref. [37]. Copyright 2011, Springer. (c) HAMR2. Reprinted with permission from Ref. [35]. Copyright 2010, IEEE. (d) Top-view and (e) bottom-view of HAMR3. Reprinted with permission from Ref. [36]. Copyright 2011, IEEE. (f) Centipede millirobot. Reprinted with permission from Ref. [14]. Copyright 2013, IEEE. (g) HAMR-VP. Reprinted with permission from Ref. [39]. Copyright 2014, SAGE. (h) MinRAR. Reprinted with permission from Ref. [40]. Copyright 2017, IEEE.
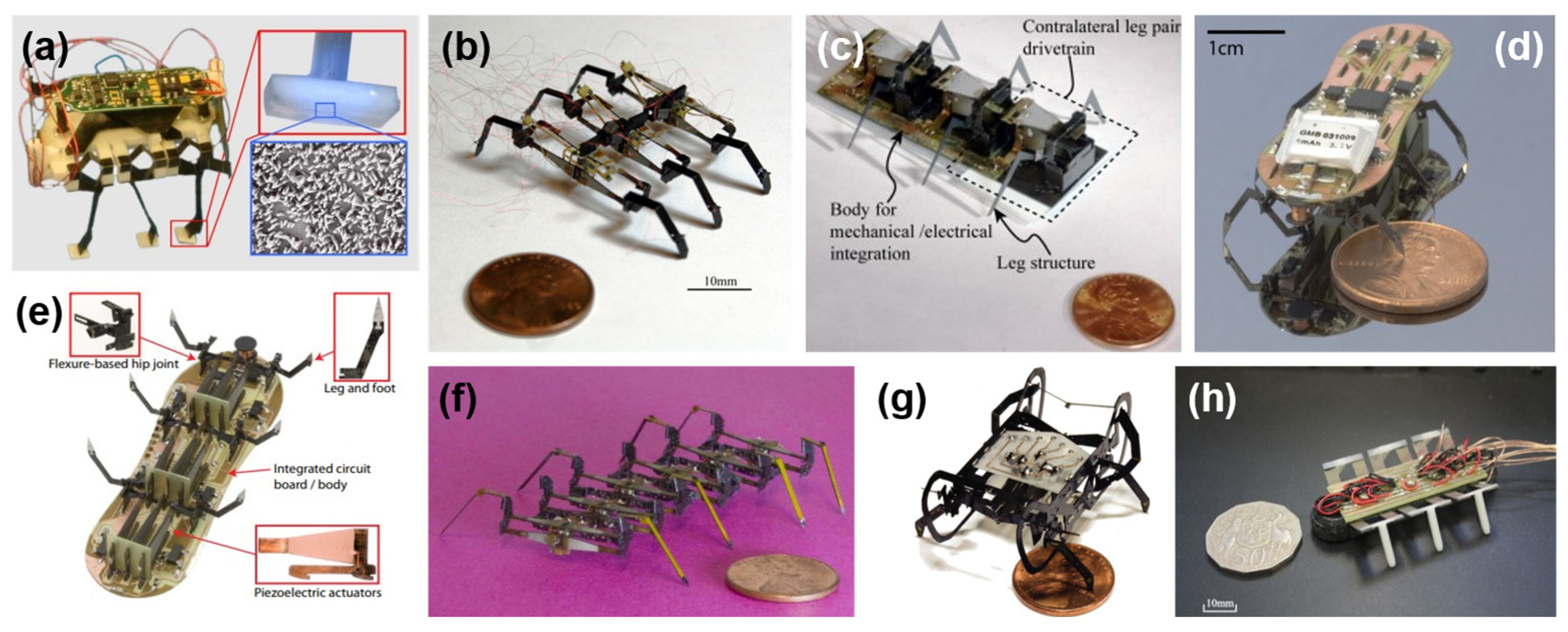
Figure 3.
(a) Photograph and (b) principle of the inchworm microrobot. Reprinted with permission from Ref. [15]. Copyright 2011, IEEE. (c) Rolling microrobot. Reprinted with permission from Ref. [46]. Copyright 2021, IEEE. (d) Travelling wave-based microrobot. Reprinted with permission from Ref. [47]. Copyright 2010, IEEE. (e) Quadruped microrobot. Reprinted with permission from Ref. [31]. Copyright 2018, MDPI. (f) MagPier microrobot. Reprinted with permission from Ref. [48]. Copyright 2011, IEEE.
Figure 3.
(a) Photograph and (b) principle of the inchworm microrobot. Reprinted with permission from Ref. [15]. Copyright 2011, IEEE. (c) Rolling microrobot. Reprinted with permission from Ref. [46]. Copyright 2021, IEEE. (d) Travelling wave-based microrobot. Reprinted with permission from Ref. [47]. Copyright 2010, IEEE. (e) Quadruped microrobot. Reprinted with permission from Ref. [31]. Copyright 2018, MDPI. (f) MagPier microrobot. Reprinted with permission from Ref. [48]. Copyright 2011, IEEE.
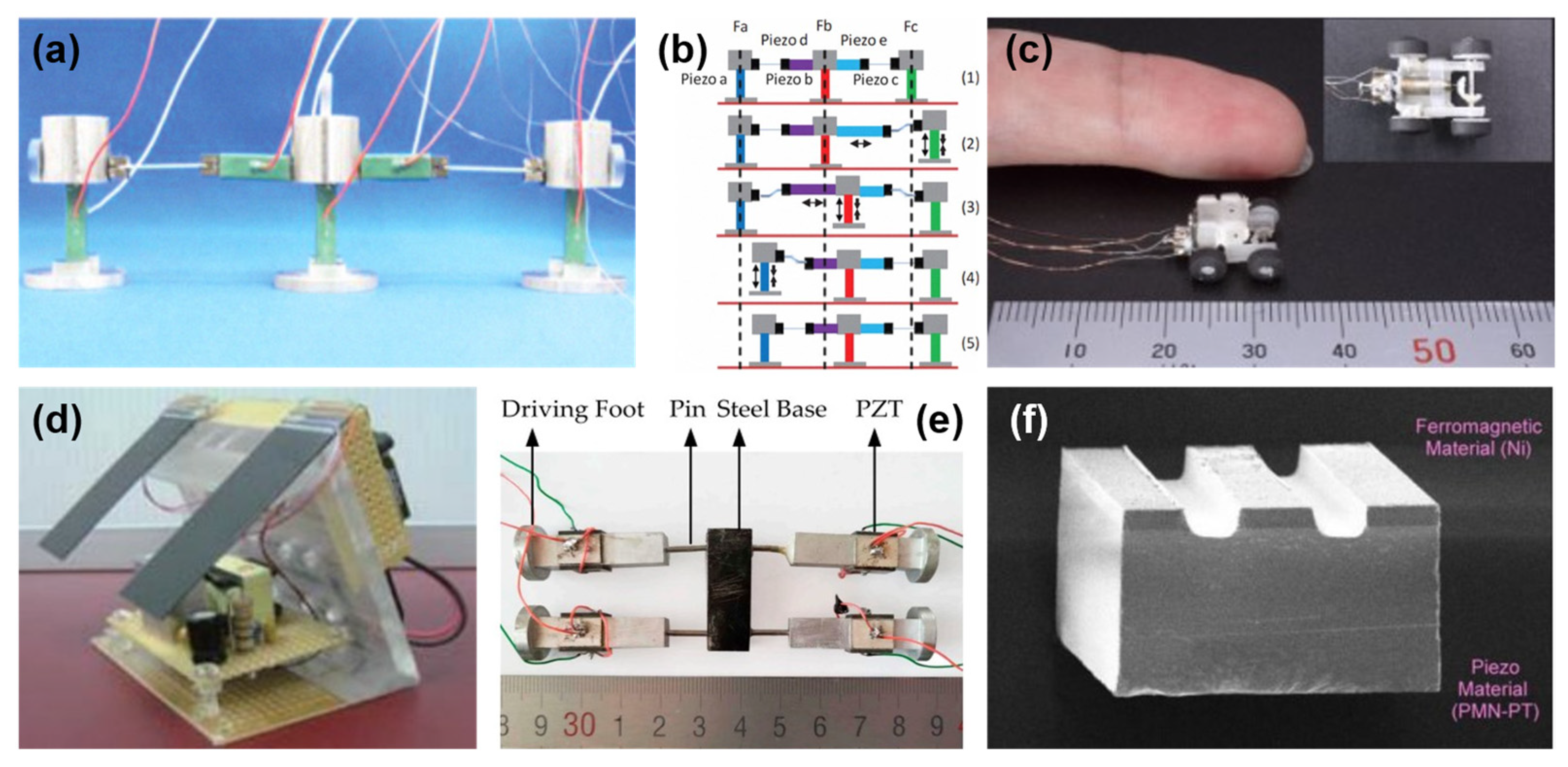
Figure 4.
(a) Large and small flapping-wing prototypes. Reprinted with permission from Ref. [33]. Copyright 2012, SAGE. (b) Bimorph actuator and (c) overall structure of RoboBee. Reprinted with permission from Ref. [34]. Copyright 2017, IEEE. (d) Whole and separated pieces of flapping-wing microrobot. Reprinted with permission from Ref. [51]. Copyright 2017, Wiley. (e) Flapping-wing micro aerial vehicle. Reprinted with permission from Ref. [52]. Copyright 2018, Wiley. RoboBee’s (f) X-wing, (g) Time-lapse of wing actuation, and (h) piezoelectric actuator with alumina and PZT. Reprinted with permission from Ref. [53]. Copyright 2019, Springer.
Figure 4.
(a) Large and small flapping-wing prototypes. Reprinted with permission from Ref. [33]. Copyright 2012, SAGE. (b) Bimorph actuator and (c) overall structure of RoboBee. Reprinted with permission from Ref. [34]. Copyright 2017, IEEE. (d) Whole and separated pieces of flapping-wing microrobot. Reprinted with permission from Ref. [51]. Copyright 2017, Wiley. (e) Flapping-wing micro aerial vehicle. Reprinted with permission from Ref. [52]. Copyright 2018, Wiley. RoboBee’s (f) X-wing, (g) Time-lapse of wing actuation, and (h) piezoelectric actuator with alumina and PZT. Reprinted with permission from Ref. [53]. Copyright 2019, Springer.
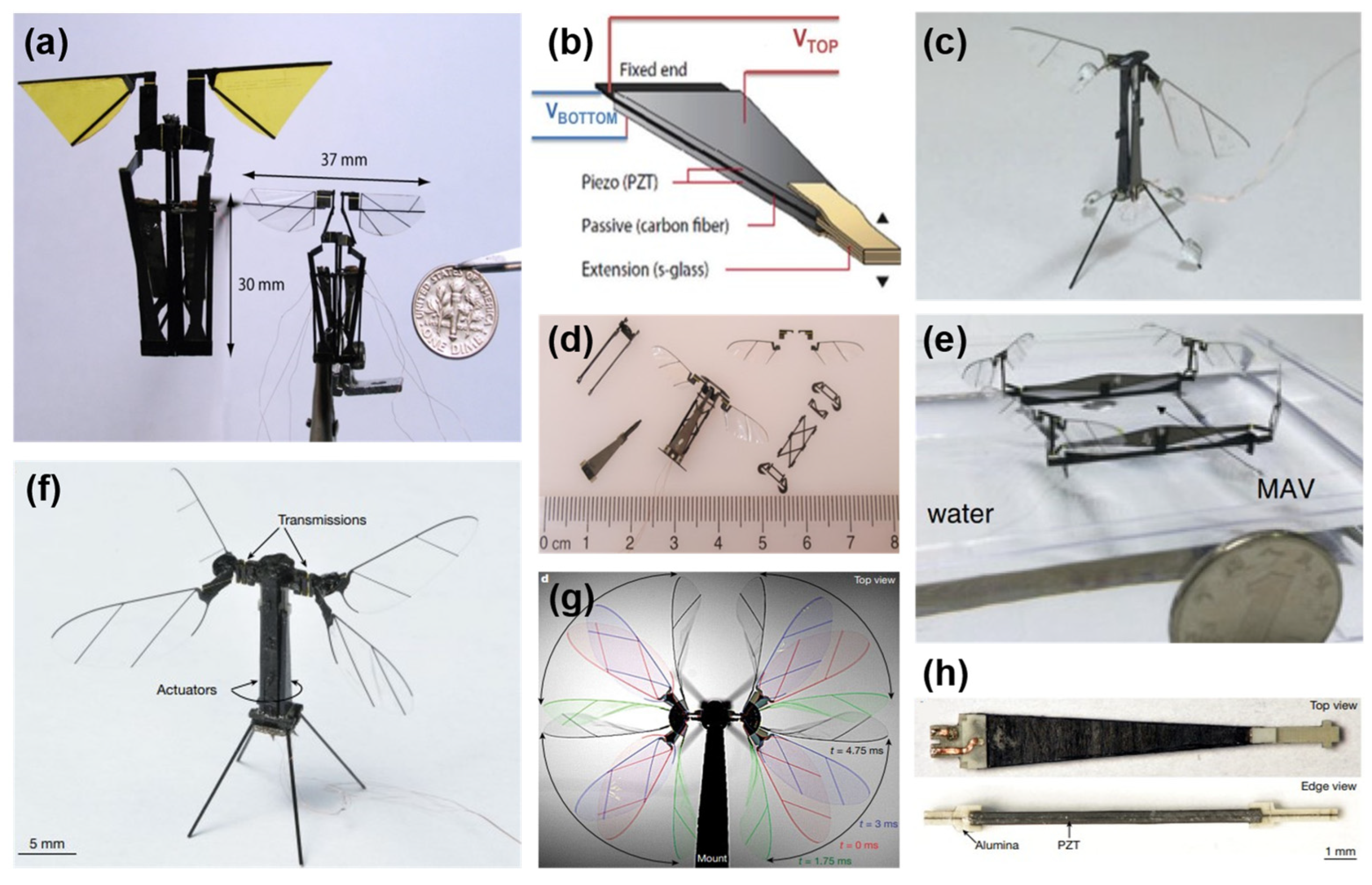
Figure 5.
(a) Overall structure and (b) semi-submerged parts of the amphibious microrobot. Reprinted with permission from Ref. [18]. Copyright 2013, Springer. (c) Overall structure and (d) actuator of RoboFly. Reprinted with permission from Ref. [54]. Copyright 2021, IEEE. (e) Microrobotic fish. Reprinted with permission from Ref. [32]. Copyright 2021, Elsevier. (f) Piezoelectric micro swimmer. Reprinted with permission from Ref. [55]. Copyright 2019, Royal Society of Chemistry.
Figure 5.
(a) Overall structure and (b) semi-submerged parts of the amphibious microrobot. Reprinted with permission from Ref. [18]. Copyright 2013, Springer. (c) Overall structure and (d) actuator of RoboFly. Reprinted with permission from Ref. [54]. Copyright 2021, IEEE. (e) Microrobotic fish. Reprinted with permission from Ref. [32]. Copyright 2021, Elsevier. (f) Piezoelectric micro swimmer. Reprinted with permission from Ref. [55]. Copyright 2019, Royal Society of Chemistry.

Figure 6.
(a) Piezoelectric fibers on cicada wings. Reprinted with permission from Ref. [57]. Copyright 2014, Royal Society of Chemistry. (b) PZT microfibers. Reprinted with permission from Ref. [58]. Copyright 2012, Elsevier. (c) Piezoelectric nanogenerator (PENG). Reprinted with permission from Ref. [59]. Copyright 2019, MDPI. (d) Concentric ring boss harvesters (CRBH). Reprinted with permission from Ref. [61]. Copyright 2017, Springer.
Figure 6.
(a) Piezoelectric fibers on cicada wings. Reprinted with permission from Ref. [57]. Copyright 2014, Royal Society of Chemistry. (b) PZT microfibers. Reprinted with permission from Ref. [58]. Copyright 2012, Elsevier. (c) Piezoelectric nanogenerator (PENG). Reprinted with permission from Ref. [59]. Copyright 2019, MDPI. (d) Concentric ring boss harvesters (CRBH). Reprinted with permission from Ref. [61]. Copyright 2017, Springer.
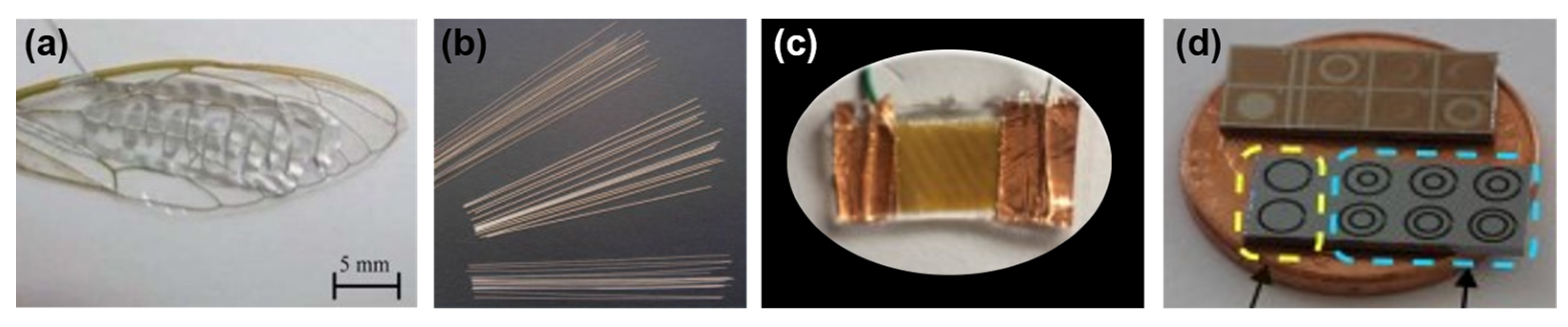
Figure 7.
(a) Laser-powered insect scale aerial vehicle. Reprinted with permission from Ref. [68]. Copyright 2018, IEEE. (b) Untethered flight of flapping-wing MAV. Reprinted with permission from Ref. [53]. Copyright 2019, Springer. (c) Wireless-powered HAMR. Reprinted with permission from Ref. [69]. Copyright 2014, IEEE. (d) Magnetically driven micro-swimming prototype. Reprinted with permission from Ref. [56]. Copyright 2021, IEEE. (e) Wireless wind-dispersed device. Reprinted with permission from Ref. [72]. Copyright 2022, Springer.
Figure 7.
(a) Laser-powered insect scale aerial vehicle. Reprinted with permission from Ref. [68]. Copyright 2018, IEEE. (b) Untethered flight of flapping-wing MAV. Reprinted with permission from Ref. [53]. Copyright 2019, Springer. (c) Wireless-powered HAMR. Reprinted with permission from Ref. [69]. Copyright 2014, IEEE. (d) Magnetically driven micro-swimming prototype. Reprinted with permission from Ref. [56]. Copyright 2021, IEEE. (e) Wireless wind-dispersed device. Reprinted with permission from Ref. [72]. Copyright 2022, Springer.

Figure 8.
Categories of piezoelectric sensing applications that can be used in microrobots.
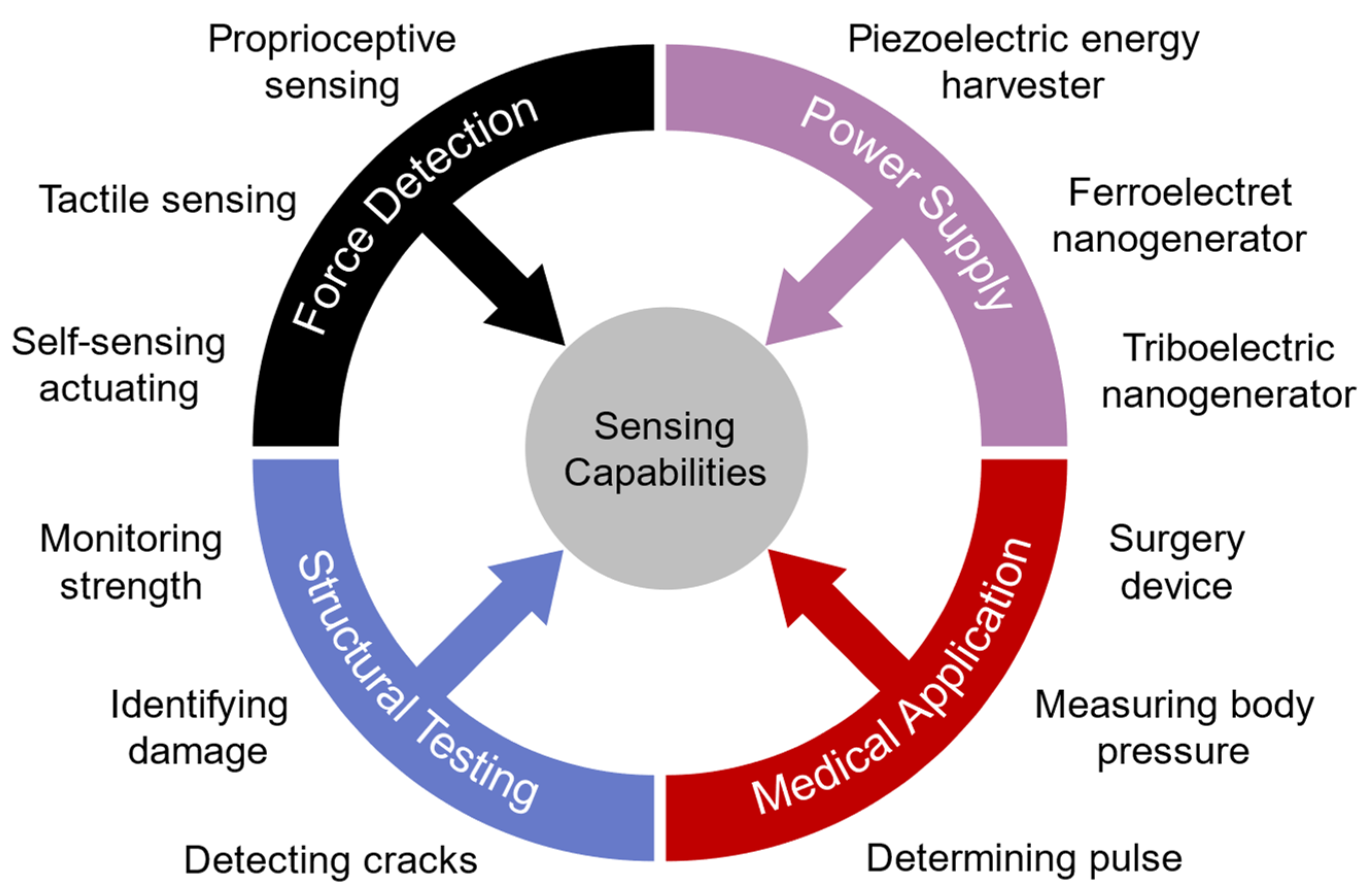
Figure 9.
(a) Piezoelectric necklace. Reprinted with permission from Ref. [95]. Copyright 2015, Elsevier. (b) Pressure-sensing piezoelectric device. Reprinted with permission from Ref. [96]. Copyright 2015, MDPI. (c) Biodegradable piezoelectric. Reprinted with permission from Ref. [98]. Copyright 2018, National Academy of Science. (d) Installation of the piezoelectric device on a curved balloon. Reprinted with permission from Ref. [23]. Copyright 2019, Wiley.
Figure 9.
(a) Piezoelectric necklace. Reprinted with permission from Ref. [95]. Copyright 2015, Elsevier. (b) Pressure-sensing piezoelectric device. Reprinted with permission from Ref. [96]. Copyright 2015, MDPI. (c) Biodegradable piezoelectric. Reprinted with permission from Ref. [98]. Copyright 2018, National Academy of Science. (d) Installation of the piezoelectric device on a curved balloon. Reprinted with permission from Ref. [23]. Copyright 2019, Wiley.
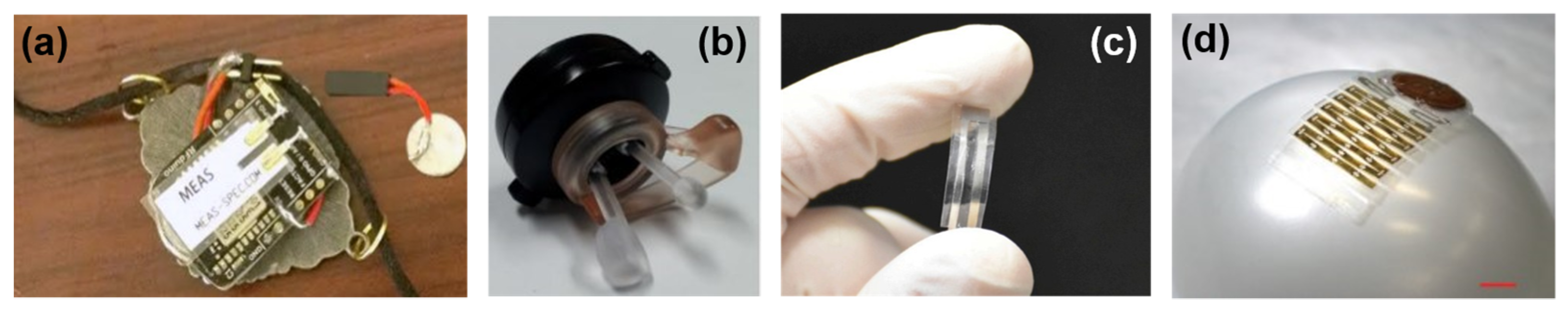
Figure 10.
Overview of the technologies used in the control section.

Figure 11.
(a) RoboBee with aerodynamic damper. Reprinted with permission from Ref. [24]. Copyright 2012, IEEE. (b) RoboBee with onboard magnetometer. Reprinted with permission from Ref. [102]. Copyright 2014, IEEE. (c) RoboBee with image sensor. Reprinted with permission from Ref. [103]. Copyright 2012, IEEE. (d) Flapping-wing microrobot with piezoelectric tail. Reprinted with permission from Ref. [109]. Copyright 2019, IEEE.
Figure 11.
(a) RoboBee with aerodynamic damper. Reprinted with permission from Ref. [24]. Copyright 2012, IEEE. (b) RoboBee with onboard magnetometer. Reprinted with permission from Ref. [102]. Copyright 2014, IEEE. (c) RoboBee with image sensor. Reprinted with permission from Ref. [103]. Copyright 2012, IEEE. (d) Flapping-wing microrobot with piezoelectric tail. Reprinted with permission from Ref. [109]. Copyright 2019, IEEE.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Summary of microrobots with different movement mechanisms.
| Movement Mechanism | Author | Year | Weight | Length Scale | Speed | Ref. |
|---|---|---|---|---|---|---|
| Ambulatory | Sahai et al. | 2006 | 3.1 g | mm | 10 mm/s | [13] |
| Ambulatory | Hoffman and Wood | 2011 | 750 mg | mm | 0.3 mm/s (0.1 bl/s) | [37] |
| Ambulatory | Baisch et al. | 2014 | 1.27 g | mm | 440 mm/s (10.1 bl/s ) | [39] |
| Ambulatory | Rios et al. | 2017 | 16 g | mm | 520 mm/s | [40] |
| Ambulatory | García et al. | 2021 | 250 mg | mm | 280 mm/s (14 bl/s) | [41] |
| Friction-based | Hutama et al. | 2021 | 640 mg | mm | 5.6 mm/s | [46] |
| Friction-based | Pan et al. | 2010 | 100 g | mm | 14 mm/s | [47] |
| Friction-based | Su et al. | 2018 | 49.8 g | mm | 33.45 mm/s | [31] |
| Flapping-wing | Ma et al. | 2013 | 80 mg | mm | - | [17] |
| Flapping-wing | Lok et al. | 2017 | 70 mg | mm | - | [34] |
| Flapping-wing | Zou et al. | 2017 | 84 mg | mm | - | [51] |
| Flapping-wing | Zhou et al. | 2018 | 247 mg | mm | - | [52] |
| Amphibious | Becker et al. | 2013 | 2.5 g | mm | 30 mm/s | [18] |
| Amphibious | Chukewad et al. | 2021 | 74 mg | mm | 5 mm/s | [54] |
| Swimming | Zhao et al. | 2021 | 1.93 g | mm | 45 mm/s | [32] |
| Swimming | Sui et al. | 2021 | - | mm | 19.1 bl/s | [56] |
bl/s—body lengths/second.
Table 2.
Application of sensing capabilities of piezoelectric materials.
| Authors | Application | Ref. |
|---|---|---|
| Fahlbusch and Fatikow | Force sensor in microgripper | [73] |
| Koç and Akça | Tactile sensing | [21] |
| Lee et al. | Biomedical applications | [74] |
| Adam et al. | Real-time micro-force sensing | [75] |
| Jayaram et al. | Control and tracking trajectories | [76] |
| Doshi et al. | Leg trajectories estimation and control | [77] |
| Chopra and Gravish | Detecting wing-collision | [78] |
| Iyer et al. | Object tracking | [79] |
| Yamashita et al. | Measurement of position | [81] |
| Chen and Li | Monitoring displacement and dynamic features | [82] |
| Ng and Liao | Self-powered sensors | [83] |
| Huang et al. | Identifying micro-force | [84] |
| Shen et al. | Measuring acceleration | [85] |
| Hosseini and Yousefi | Flexible force sensor | [86] |
| Hu et al. | Dynamic loading observation | [87] |
| Cao et al. | Athletic performance | [88] |
| Ihn and Chang | Identifying fatigue cracks | [22] |
| Xu et al. | Structural damage identifying | [89] |
| Shin et al. | Structural strength monitoring | [90] |
| Chen et al. | Structural strength monitoring | [91] |
| Feng and Tsai | Industrial transducers | [92] |
| Kalange and Gangal | Human pulse measuring | [94] |
| Kalantarian et al. | Monitoring eating habits | [95] |
| Park et al. | Heart rate measurement | [96] |
| Zhou et al. | Sound signal detection | [97] |
| Curry et al. | Internal body pressure | [98] |
| Sun et al. | Continuous health monitoring | [23] |
| Asadnia et al. | Avoiding obstacles | [99] |
| Tian et al. | Training for table tennis | [100] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Fath, A.; Xia, T.; Li, W. Recent Advances in the Application of Piezoelectric Materials in Microrobotic Systems. Micromachines 2022, 13, 1422. https://doi.org/10.3390/mi13091422
AMA Style
Fath A, Xia T, Li W. Recent Advances in the Application of Piezoelectric Materials in Microrobotic Systems. Micromachines. 2022; 13(9):1422. https://doi.org/10.3390/mi13091422
Chicago/Turabian StyleFath, Alireza, Tian Xia, and Wei Li. 2022. "Recent Advances in the Application of Piezoelectric Materials in Microrobotic Systems" Micromachines 13, no. 9: 1422. https://doi.org/10.3390/mi13091422
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.