1. Introduction
The Delmarva Peninsula in eastern Maryland and Delaware is characterized by a high density of forested depressional wetlands, commonly referred to as Delmarva bays [
1]. Depressional wetlands provide critical ecological functions, including surface-water storage, groundwater recharge, and hydrologic inflows [
2,
3], reducing peak stream flows and downstream flooding [
4,
5], as well as providing carbon storage [
6] and wildlife habitat [
1]. Surface-water levels in depressional wetlands can be expected to vary in response to seasonal and interannual variability in precipitation, evapotranspiration, and human activities [
7]. The ability to accurately map and monitor these changes in surface-water extent is essential to detect and respond to floods [
8,
9], manage and regulate aquatic ecosystems [
10,
11,
12], and predict contributions to stream flow [
13,
14]. We note that identifying surface-water extent cannot be considered equivalent to mapping wetlands, but areas that are inundated just prior to or at the beginning of the growing season (i.e., mid-March to mid-April at the study site) are very likely to meet the hydrologic definition of a wetland (i.e., inundated or saturated in the root zone for two weeks within the growing season). Areas that are not inundated, but instead have near-surface saturated soils may also meet wetland definitions. This study sought to maximize the accuracy of inundation extent estimates for small, forested depressional wetlands by pairing synthetic aperture radar (SAR) and fine resolution multispectral imagery with light detection and ranging (lidar) datasets.
Surface-water extent is commonly derived from multiple types of imagery; however limited work has focused on mapping surface-water extent in highly challenging environments, such as small forested wetlands. Landsat imagery, for example, is commonly used to map and monitor surface-water extent [
15,
16,
17,
18], but is challenging to use in landscapes dominated by small wetlands [
19,
20,
21]. In such landscapes, finer spatial resolution imagery can improve efforts to map variability in surface-water extent for small wetlands [
11,
22]. However, in forested environments, leaf, trunk, and branch cover can complicate efforts to identify surface water using multispectral imagery, regardless of spatial resolution [
19,
23]. In such environments, either leaf-off periods are targeted [
19] or SAR imagery is commonly used to map surface-water extent across flooded forests [
24,
25,
26]. Most applications of SAR imagery, however, have mapped surface-water extent across large forested wetlands or floodplains, with efforts to map surface-water extent for small, forested wetlands more limited (e.g., [
27,
28]). In challenging environments, such as forests, the integration of multiple types of imagery has been used to improve the detection of wetlands. For example, Landsat has been used with SAR imagery to map surface water (e.g., [
29,
30]). However, few studies have paired fine resolution, multispectral imagery with SAR imagery, which can allow fluctuations in surface-water extent associated with smaller water features to be detected in comparison to coarser resolution imagery [
31].
To improve predictions of wetland or inundation extent, optical and SAR imagery is commonly combined with topographic measures. Most surface-water mapping efforts to date have included relatively simple topographic indices, such as relief, slope, and curvature [
29,
30,
31,
32,
33]. Depressional wetlands have also been directly mapped using lidar-derived digital elevation models (DEMs), which use local changes in elevation to predict depressions. Such approaches are most often applied to estimate wetland surface-water storage capacity [
34,
35] or to identify wetlands that are difficult to detect, such as vernal pools [
36], sinkholes [
37], or forested wetlands [
38]. Efforts to derive lidar-based depressions, however, have yet to be used to improve predictions of inundation extent despite the effectiveness of integrating simpler topographic indices.
Delmarva bays are shallow, closed depressions, normally elliptical or ovate in shape, and range in size [
39,
40]. They are commonly associated with Carolina bays, which occur along the Atlantic Coastal Plain, from Florida to New Jersey [
1,
41]. Surface hydrology of these bays is dependent on seasonal and annual precipitation and evapotranspiration patterns, with groundwater exchanges ranging from episodic to nearly continuous, so that over time many bays serve as both recharge and discharge sites [
42,
43,
44,
45]. Consequently, surface water extent across Delmarva bays varies both seasonally and interannually [
19]. Delmarva bays are particularly challenging to map because they are relatively shallow features, which limits the usefulness of nationally available DEMs that have relatively low vertical accuracy (e.g., 3 m or 10 m). Additionally, many of these wetlands are small and forested, complicating efforts to accurately identify surface water contained within their boundaries. Past efforts to map surface water in forests within the region have employed imagery collected via active sensors, including C-band SAR [
23,
27] and lidar [
46], while recent efforts have used Landsat imagery by targeting leaf-off periods and pairing Landsat with lidar backscatter intensity [
19]. Inundation extent has been shown to vary interannually and be positively correlated with stream flow [
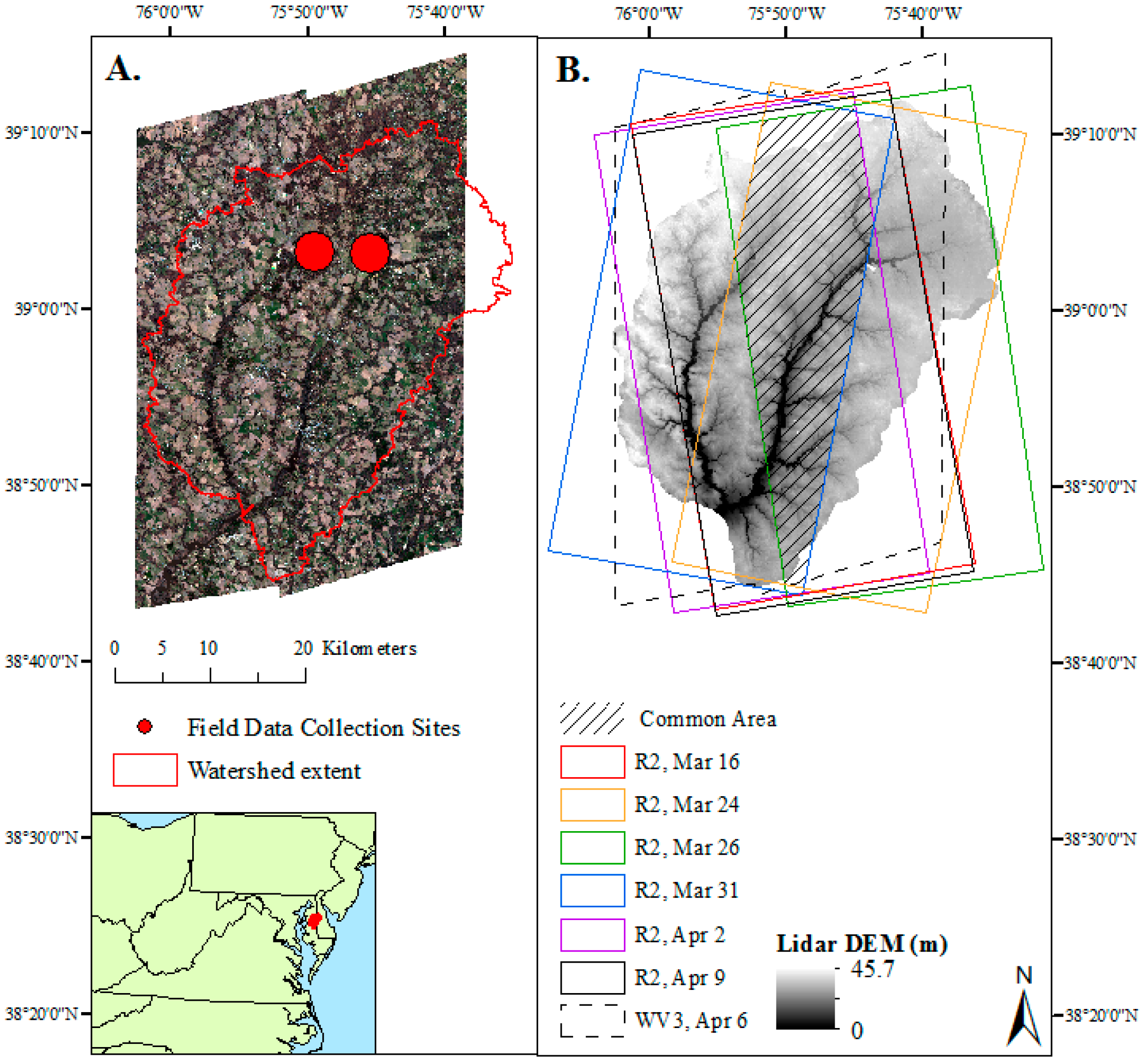
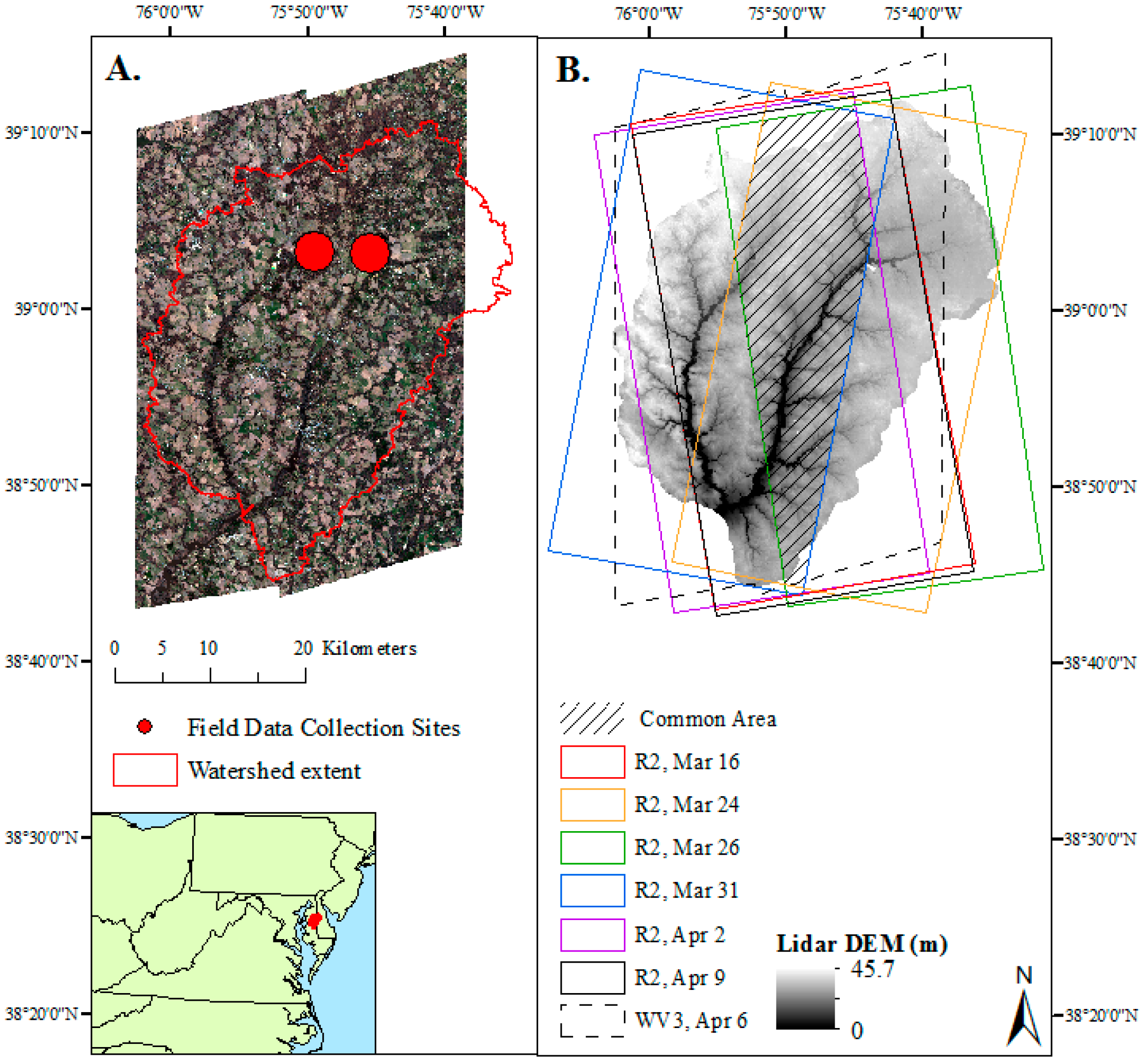
19], however, only efforts using lidar backscatter intensity have attempted to map surface water at the scale of individual wetlands. In this study, we sought to maximize the accuracy of forested inundation maps across the Upper Choptank River watershed in the Delmarva Peninsula by testing if accuracy could be improved by integrating multiple datasets with unique advantages and incorporating a more sophisticated topographic measure (i.e., depression locations). We tested the ability of Radarsat-2, Worldview-3, lidar-derived depressions, and a topographic wetness index (TWI) derived from a lidar DEM, to map surface water extent. Our research questions included:
How do prior weather conditions affect the identification of depressions using lidar data?
How accurate are inundation products derived using high-resolution optical and SAR data?
How consistent is the accuracy of inundation products derived from SAR data repeatedly collected over a short time period?
Can integrating multiple sources of data (lidar, optical, and radar imagery) improve inundation mapping?
Our study was designed to evaluate the contribution of each of the datasets in improving the accuracy of mapping forested inundation during spring high-water conditions. We are unaware of any studies that have paired these sources of imagery with lidar-derived depressions. Accurate mapping of inundation is critical to predicting and monitoring the effects of human-induced change and interannual variability on water quantity and quality.
4. Discussion
Our ability to map surface-water extent is unequal across the landscape. Monitoring surface-water extent in landscapes dominated by large, non-forested water bodies is limited primarily by the temporal frequency and date range of the available imagery. Monitoring surface-water extent in landscapes dominated by small wetlands and/or forested environments, also requires consideration of imagery spatial resolution as well as our ability to “see” through tree trunks, branches and leaves. The development of improved techniques to map surface-water extent in these challenging environments is key not only to improve our ability to monitor variability in surface-water extent, but also to improve our understanding of wetland location. National Wetland Inventory (NWI) maps, produced by U.S. Fish and Wildlife Services, for example, are the most widely available and used wetland maps in the United States. As NWI wetlands were visually interpreted from aerial photography, errors are highest for wetland types that are difficult to detect with photointerpretation such as small, forested wetlands, farmed wetlands, partly drained wetlands, or wetlands in narrow valleys [
81,
82]. Our approach could be applicable to update the NWI dataset, particularly in regions dominated by deciduous forests. In this study we explored how prior weather conditions influenced depression identification from lidar data, how accurate and consistent inundation products were derived using high-resolution optical and SAR data, and if integrating multiple sources of data (lidar, optical, and radar imagery) could improve inundation mapping.
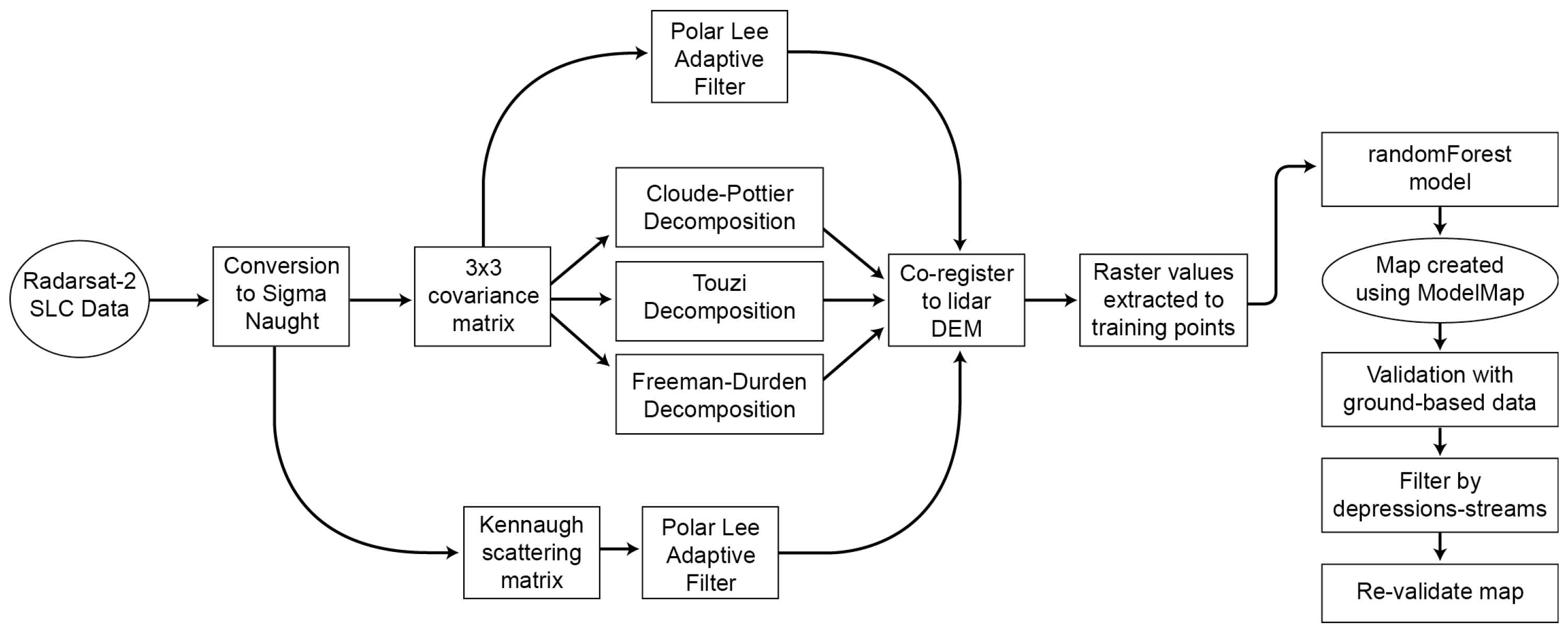
Within our analysis, we used Radarsat-2 imagery as our primary source of imagery because SAR has been previously shown to be effective in mapping surface water under vegetated canopies [
24,
25,
26]. Future efforts to monitor inundation in forested areas during the growing season will likely require SAR imagery. We found that Radarsat-2 alone can produce adequate maps of inundation in a challenging environment dominated by small, forested wetlands. When paired with a lidar-derived filter of depressions and streams, Radarsat-2 inundation maps showed an average, overall accuracy of 79%. In comparison, Pistolesi et al. [
28], who similarly mapped small, forested wetlands using ALOS PALSAR data, obtained an overall accuracy of 67% to 72%, while Lang and McCarty [
46] mapped forested, inundated cover in an overlapping study area within the Upper Choptank River watershed at 66% accuracy using leaf-off, near-infrared digital photography.
Lang et al. [
27] mapped forested wetlands in the Chesapeake Bay watershed using Advanced Synthetic Aperture Radar (ASAR) imagery and detected inundation during leaf-off conditions 89% to 96% correctly. These accuracy statistics are substantially better than that achieved using Radarsat-2 alone in this study. The imagery utilized by Lang et al. [
27] was collected at an incidence angle of 23°, which may partially explain differences in findings. The incidence angle is an important consideration in the utilization of SAR imagery to map surface water below vegetation. The community has not reached agreement as to how large of an incidence angle is acceptable, but the smaller the angle, or closer to nadir, the fewer leaves and branches the radar signal has to travel through to reach the surface. Although our incidence angles can be considered less than ideal (31.4°–48.0°), it is similar to the incidence angles used by others to detect surface water [
69,
83,
84], however wetland size may matter and most of these existing efforts targeted open water wetlands or larger flooded vegetation features.
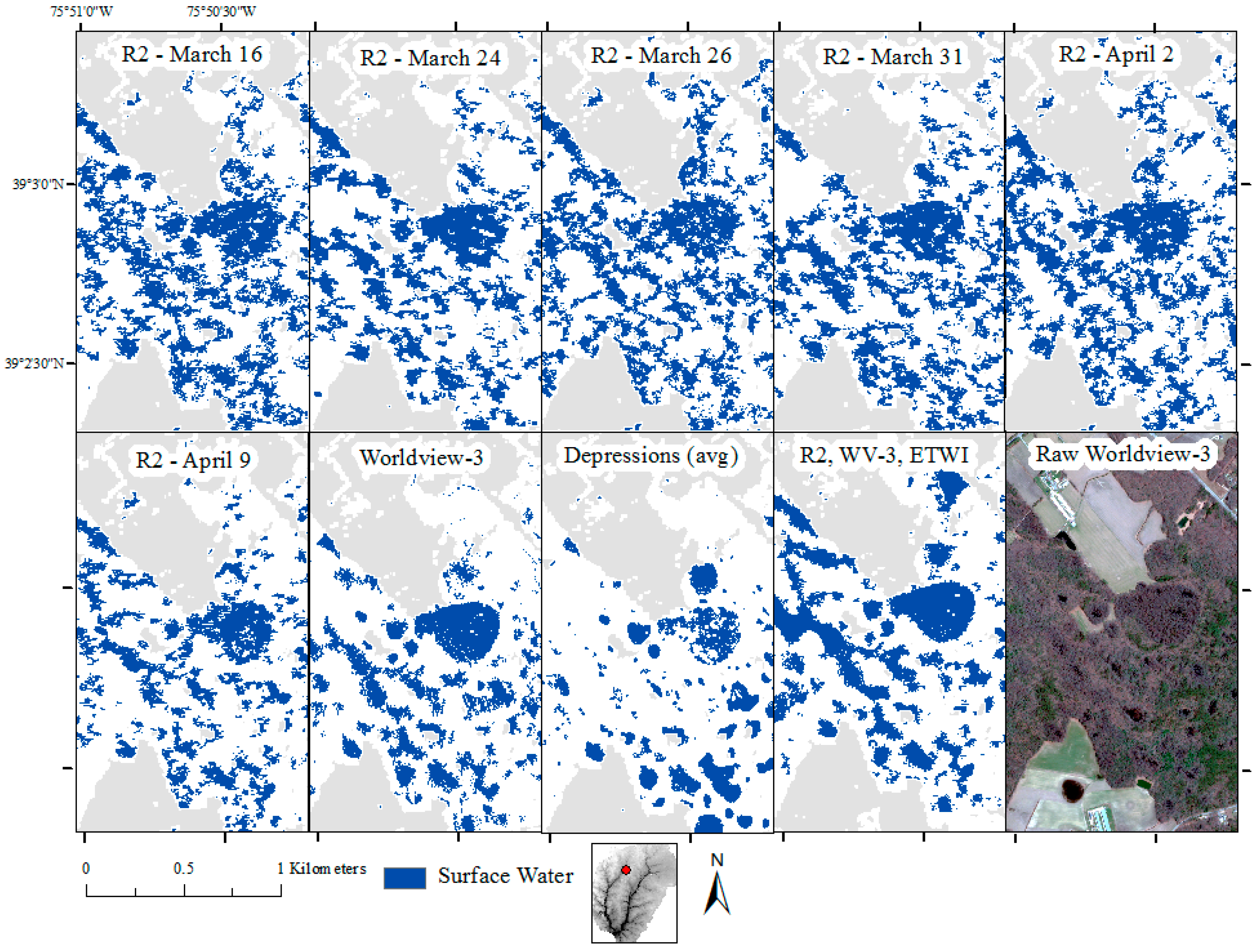
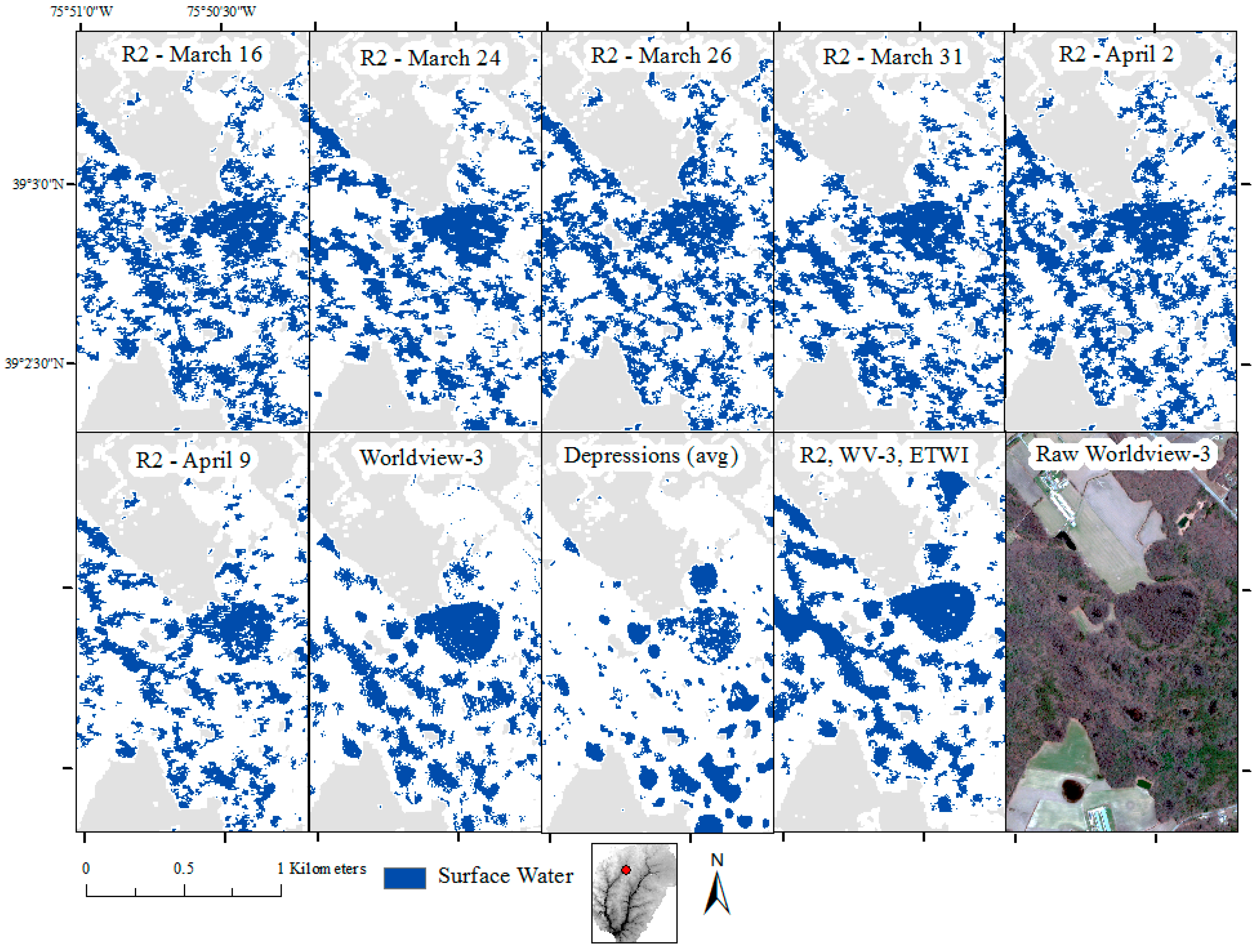
Several other sources of error may have also influenced our accuracy results. Antecedent precipitation conditions may have negatively impacted the Radarsat-2 surface water maps. Recent precipitation can reduce the contrast in signal between flooded forest and adjacent non-flooded forest by elevating soil moisture levels in non-flooded forest. Precipitation occurred in the seven days prior to all six of the Radarsat-2 images and occurred in the two days prior to four of the six Radarsat-2 images (
Table 1). This may help explain the large amount of error observed in the March 16 surface water output which saw 2 cm of precipitation fall within the two days prior to the image collection (
Table 1). This image was also collected within days of snowmelt, meaning soil moisture content was likely high even in upland areas. Antecedent precipitation conditions could also help explain some significant differences in inundation mapped by Radarsat-2 on different dates, a finding which suggests that subtle differences in image specifications and ground conditions can influence the ability of SAR to map inundation. It is also possible that wind, which can influence the surface roughness of water, could have negatively affected the Radarsat-2 inundation maps; however, we might expect wind to show a greater influence on open waters relative to forested waters. Efforts to maps inundation in non-forested areas showed a substantially higher accuracy relative to efforts to map inundation in forested areas (
Table 4), suggesting that wind likely played a nominal role in influencing accuracy statistics. One additional potential source of error within the forested areas was that the training and validation data were largely collected across flooded forests with no gap in the canopy and non-inundated hummocks existed around tree trunks. These hummocks were often up to 1 m
2, and may have introduced error into our reference points by overestimating inundation extent within the sampled “inundated” polygons and therefore potentially artificially elevated omission errors.
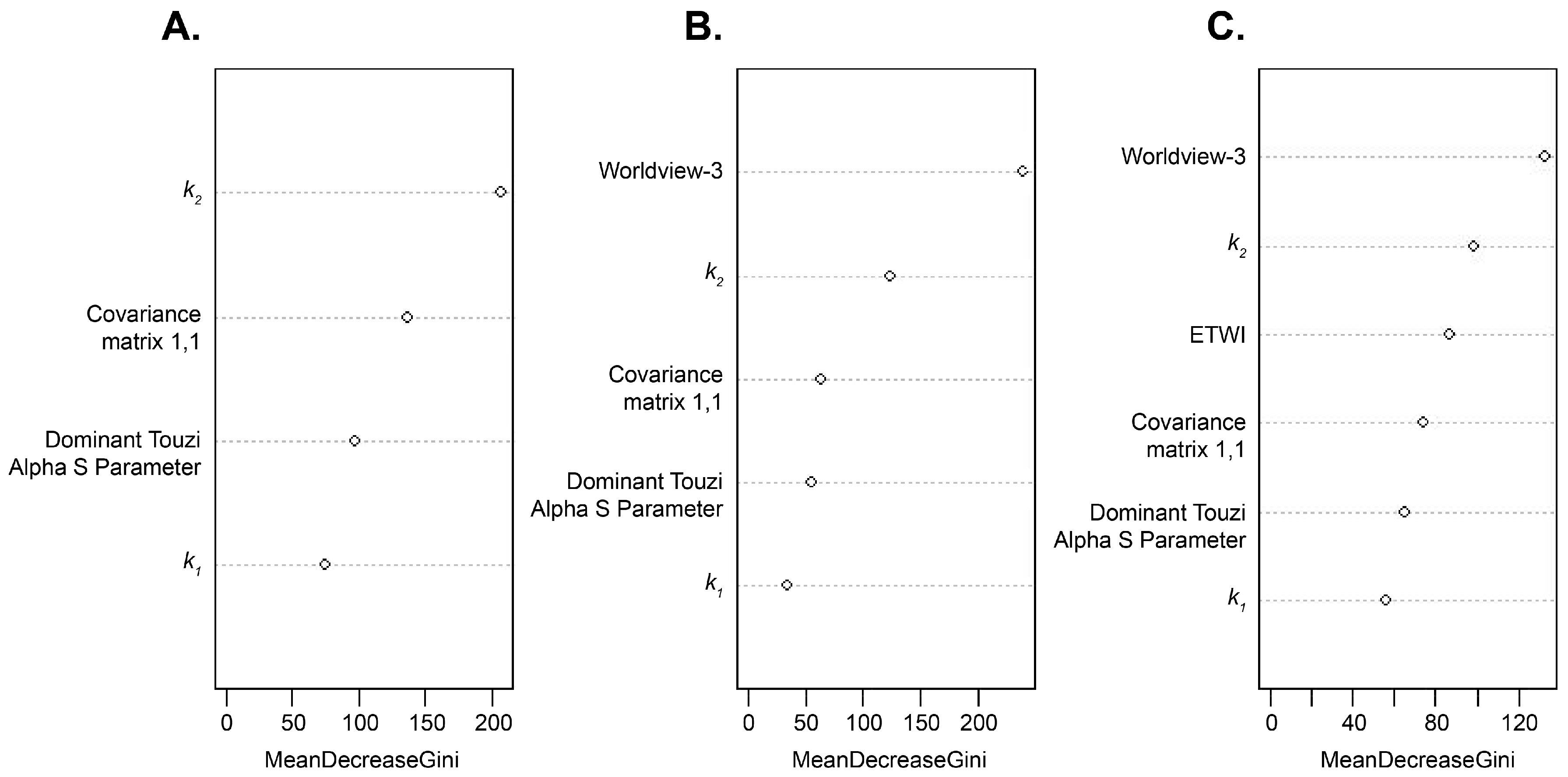
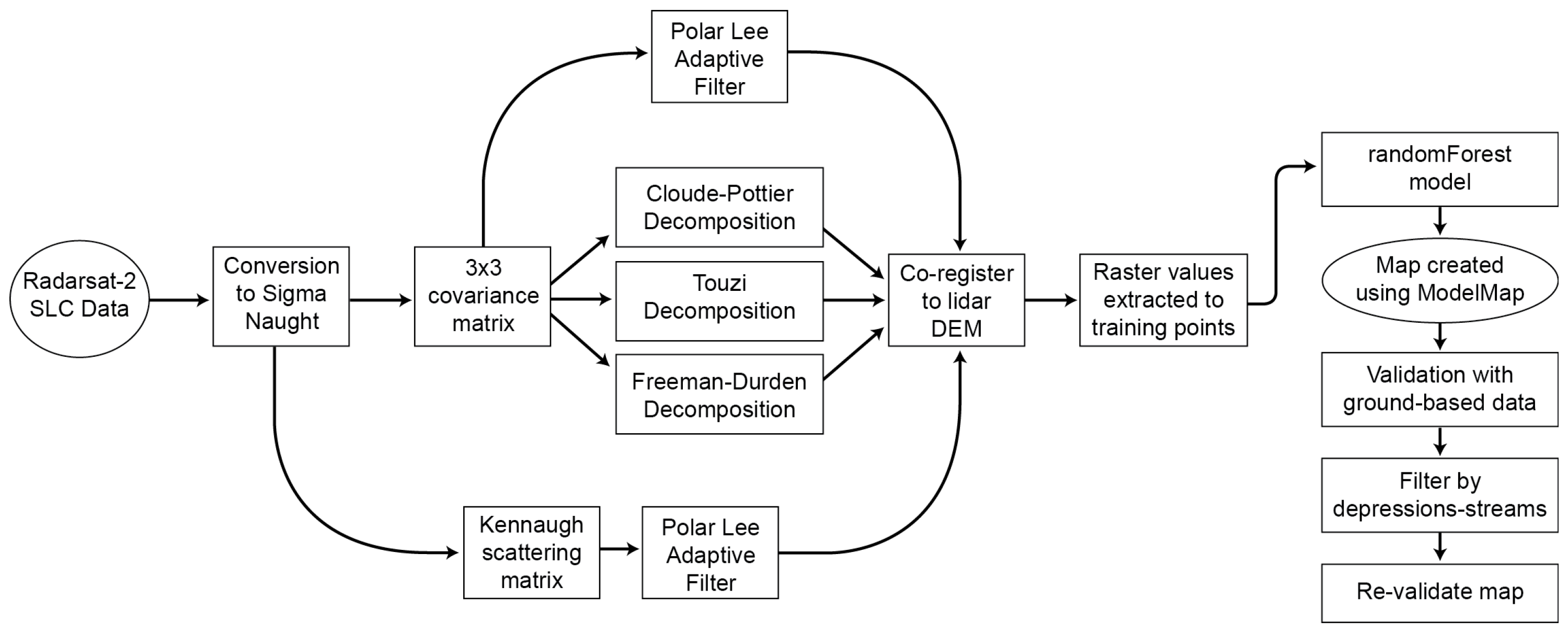
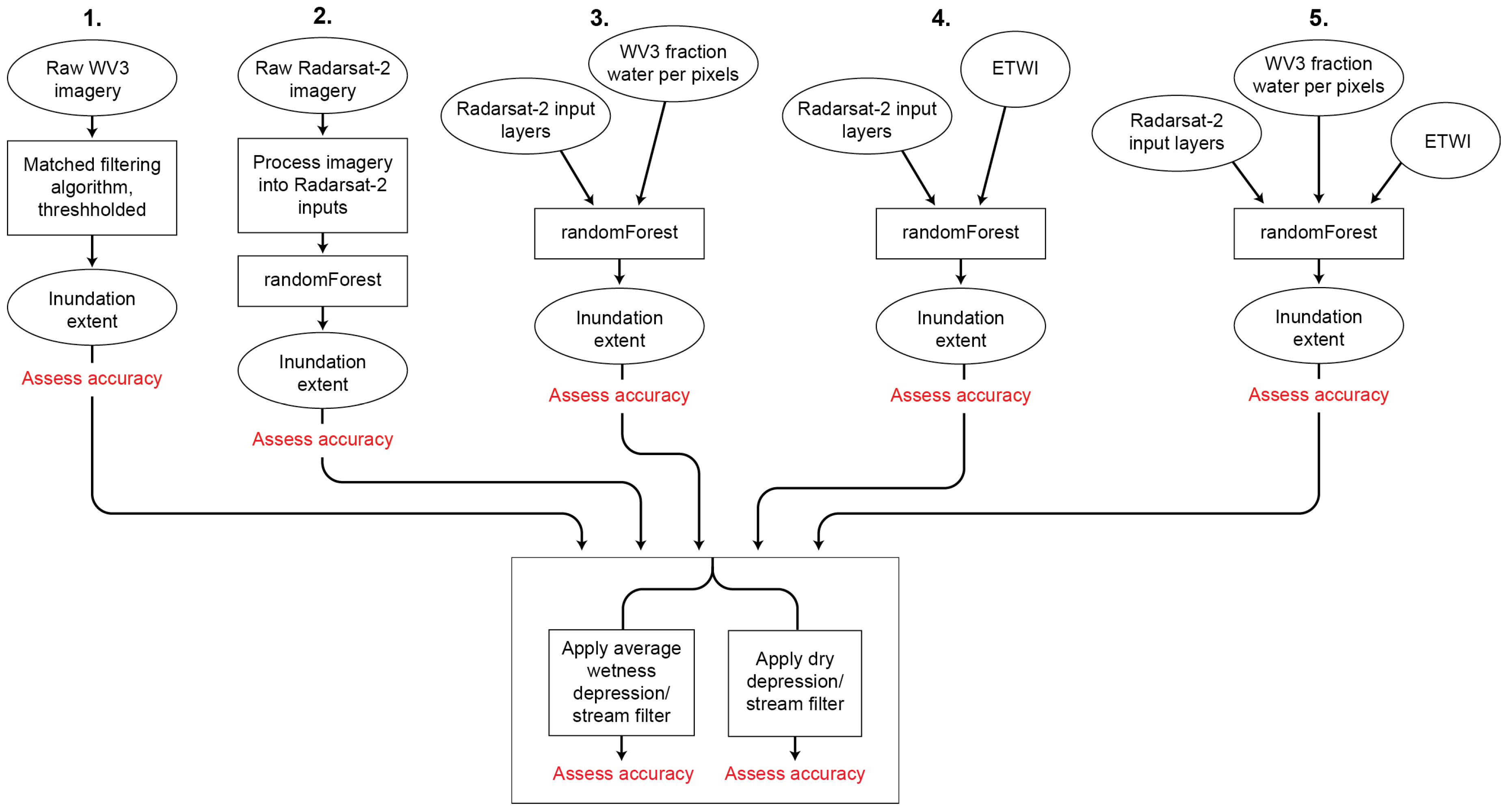
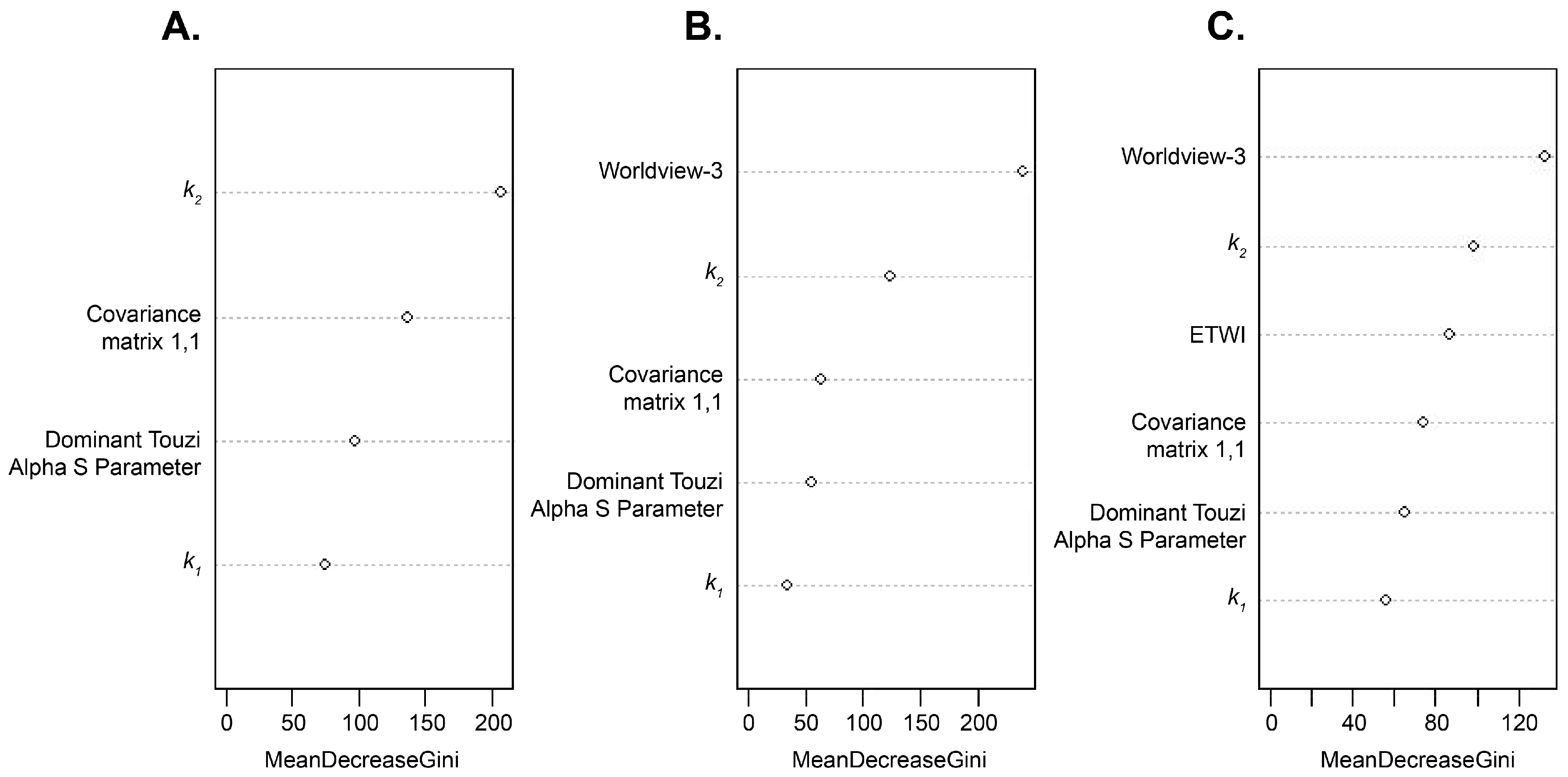
Approaches to effectively map inundation with SAR imagery are still developing. Decompositions and matrix transformations of raw SAR imagery have been found to be useful in mapping surface water [
69,
83,
85]. The aim of this study was not to distinguish between the transformations that were more or less helpful, but instead to generate a number of inputs to maximize our probability of accurately identifying surface water with random forest models. However, large differences in the variables selected to be included between the six Radarsat-2 dates, suggest that it may be difficult to generalize, even within a single landscape, regarding which data transformations may be more or less helpful. In addition, variables selected for each date often included an element from several different decompositions and transformations, suggesting users should test a variety of methods instead of a single one when utilizing SAR imagery. The Kennough matrix was the most consistently utilized and tended to show the highest variable importance within random forest models across the six dates. This finding is consistent with several studies that have argued for utilizing this method [
69,
70].
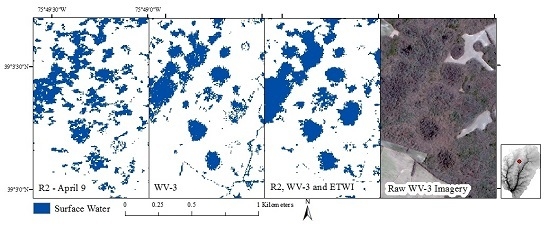
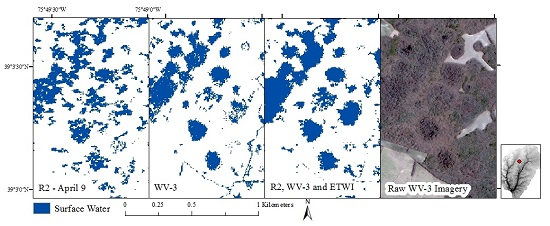
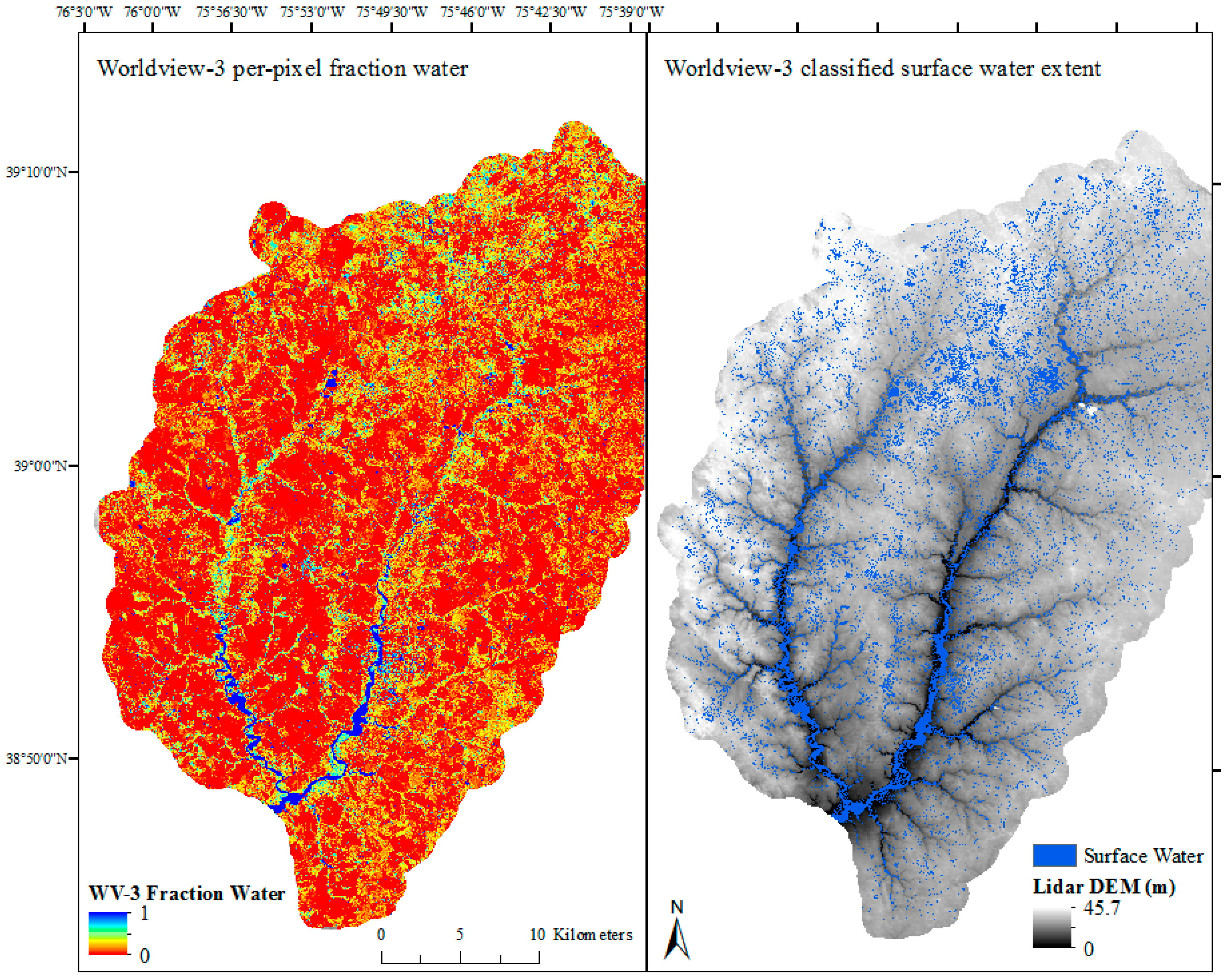
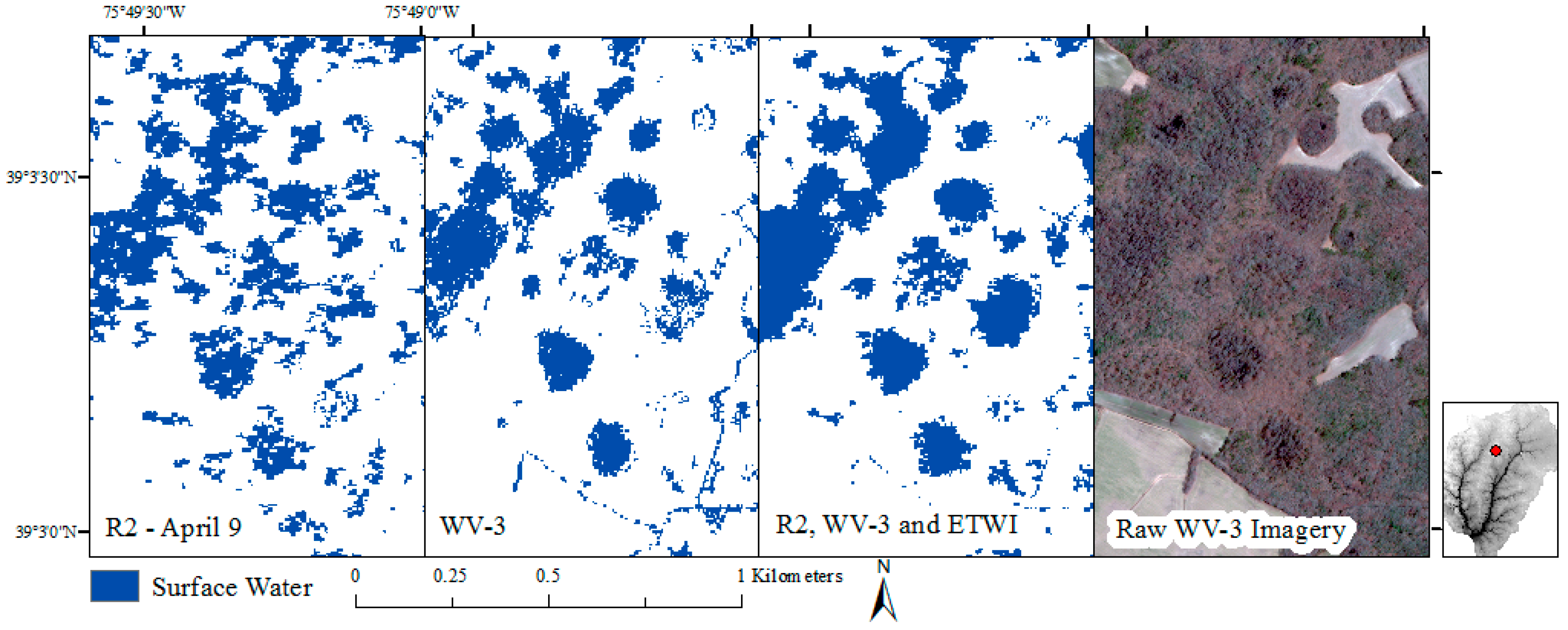
Integrating high-resolution imagery, in this case Worldview-3 imagery, was found to significantly improve inundation maps derived from SAR, in this case producing an overall accuracy of greater than 90%. However, timing, not just of the Radarsat-2, but also the Worldview-3 imagery collection is a critical component to interpreting our findings. The Worldview-3 imagery showed excellent potential to map forested wetlands and improved the ability of Radarsat-2 to map forested wetlands (combined models showed overall accuracy of 92% and 94%), however, our findings can be assumed to depend on collecting the imagery during leaf-off conditions. For applications focused on peak spring water conditions, this may be adequate, but for applications requiring seasonal changes in surface water extent, the ability of Worldview-3 imagery to perform following leaf-out is likely limited. Our strategy to improve mapping abilities by targeting leaf-off periods has been used by others (e.g., [
19]), but is limited to environments which experience a leaf-off period. This means that our approach of integrating high-resolution multispectral imagery with SAR imagery will be less applicable to forests dominated by evergreen trees. In general, commercial satellites such as QuickBird-2, GeoEye-1, and Worldview-2 and 3, offer a very fine spatial resolution (1.2 to 2.4 m) that can improve the detection of small wetlands, narrow channels, and fine-scale changes in water level and surface water extent [
11,
22,
86]. However, in addition to the need to target leaf-off seasons, imagery from these satellites is typically collected on-demand, and so may be costly or unavailable (due to competing requests for imagery) during a period of interest. Our analysis demonstrates that the utilization of such imagery during leaf-off periods can substantially improve the detection of surface water relative to using SAR imagery alone.
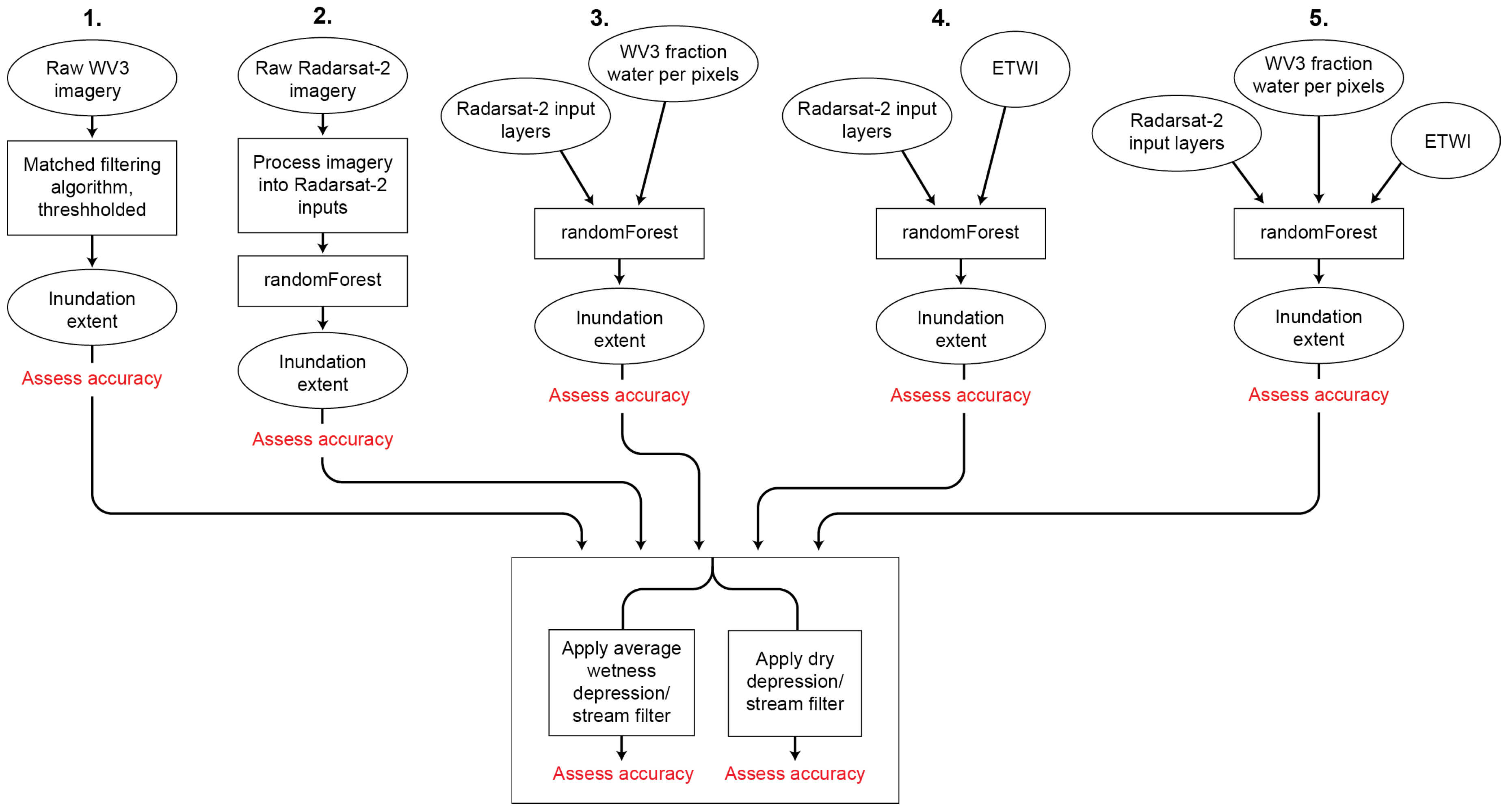
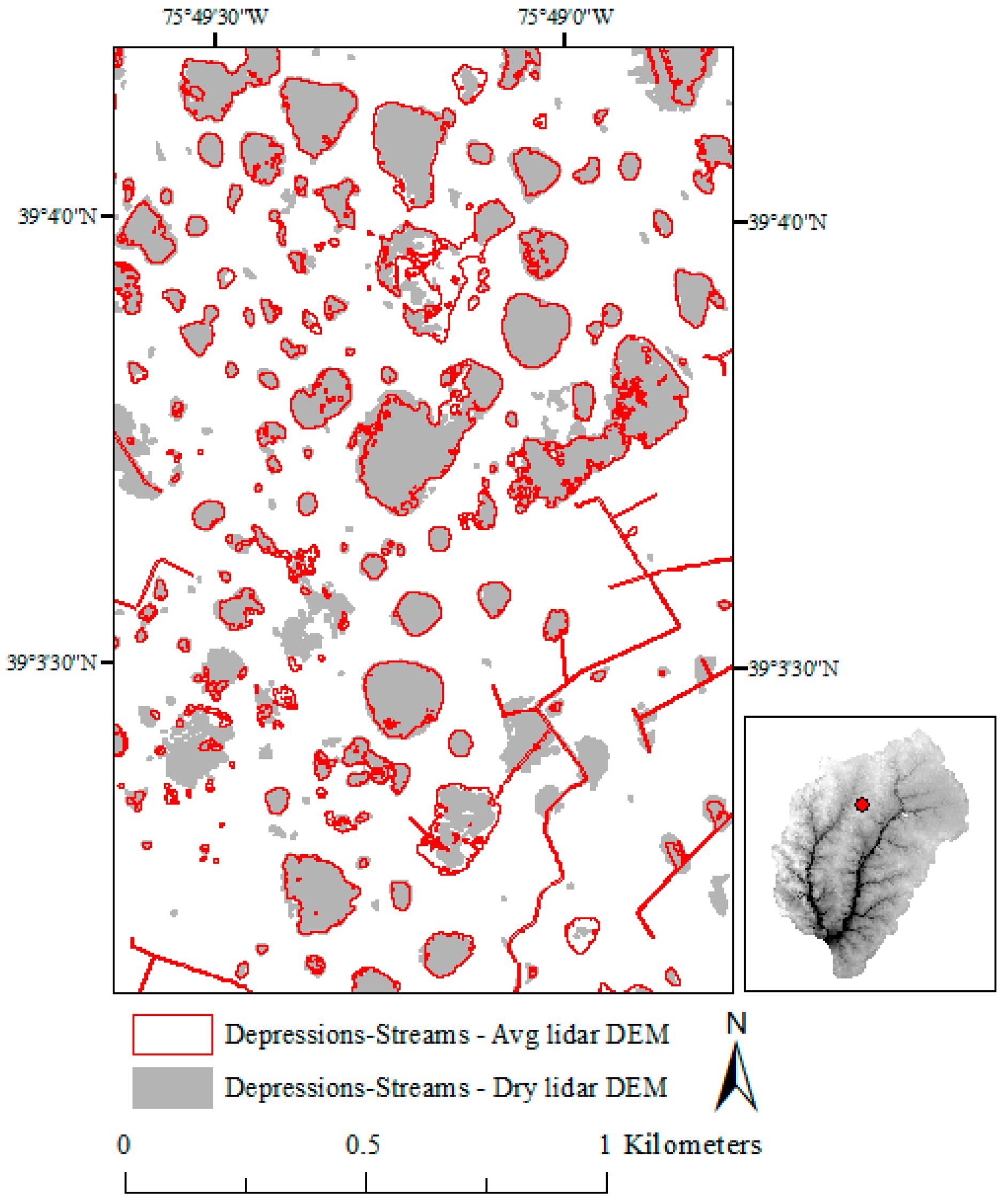
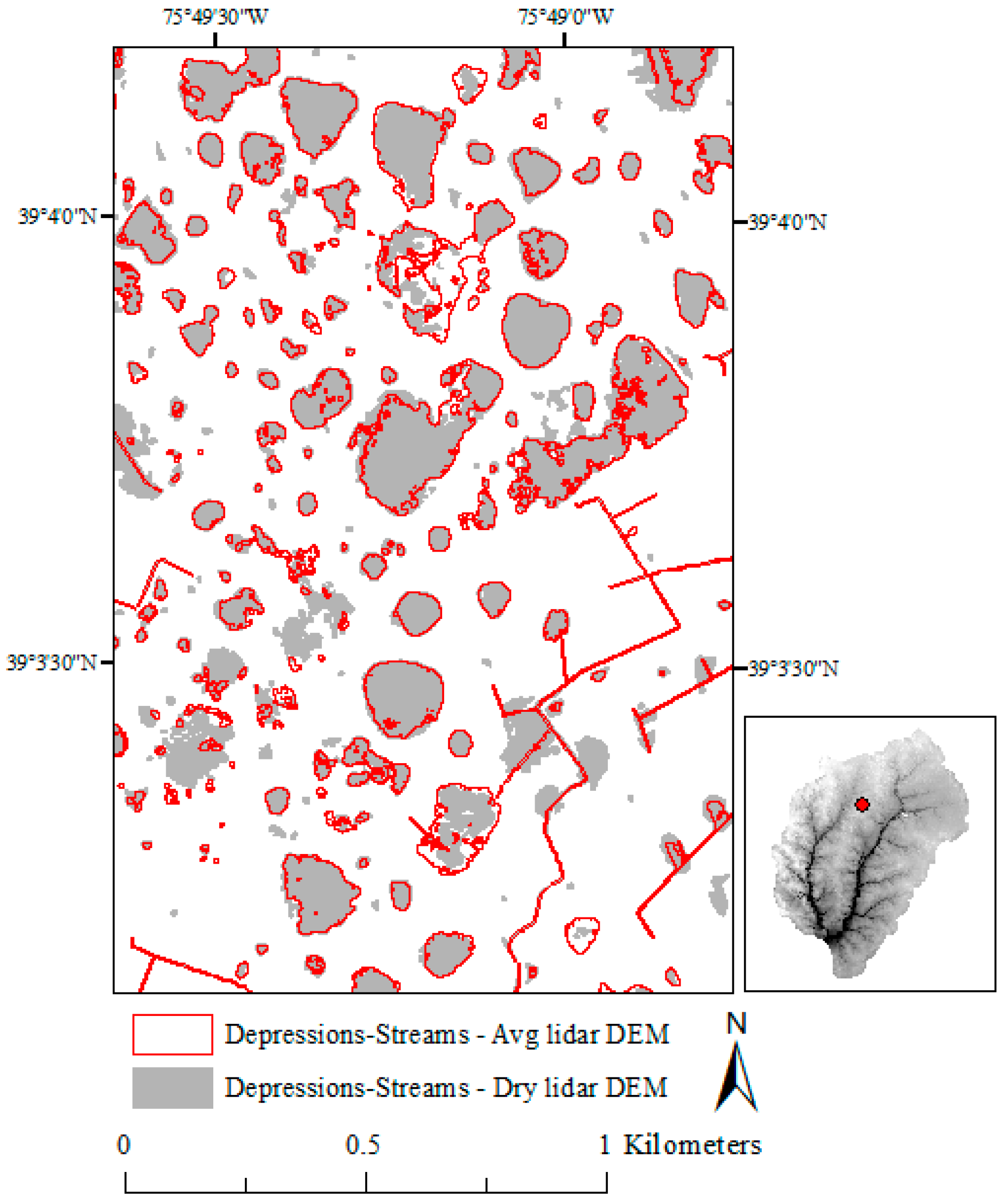
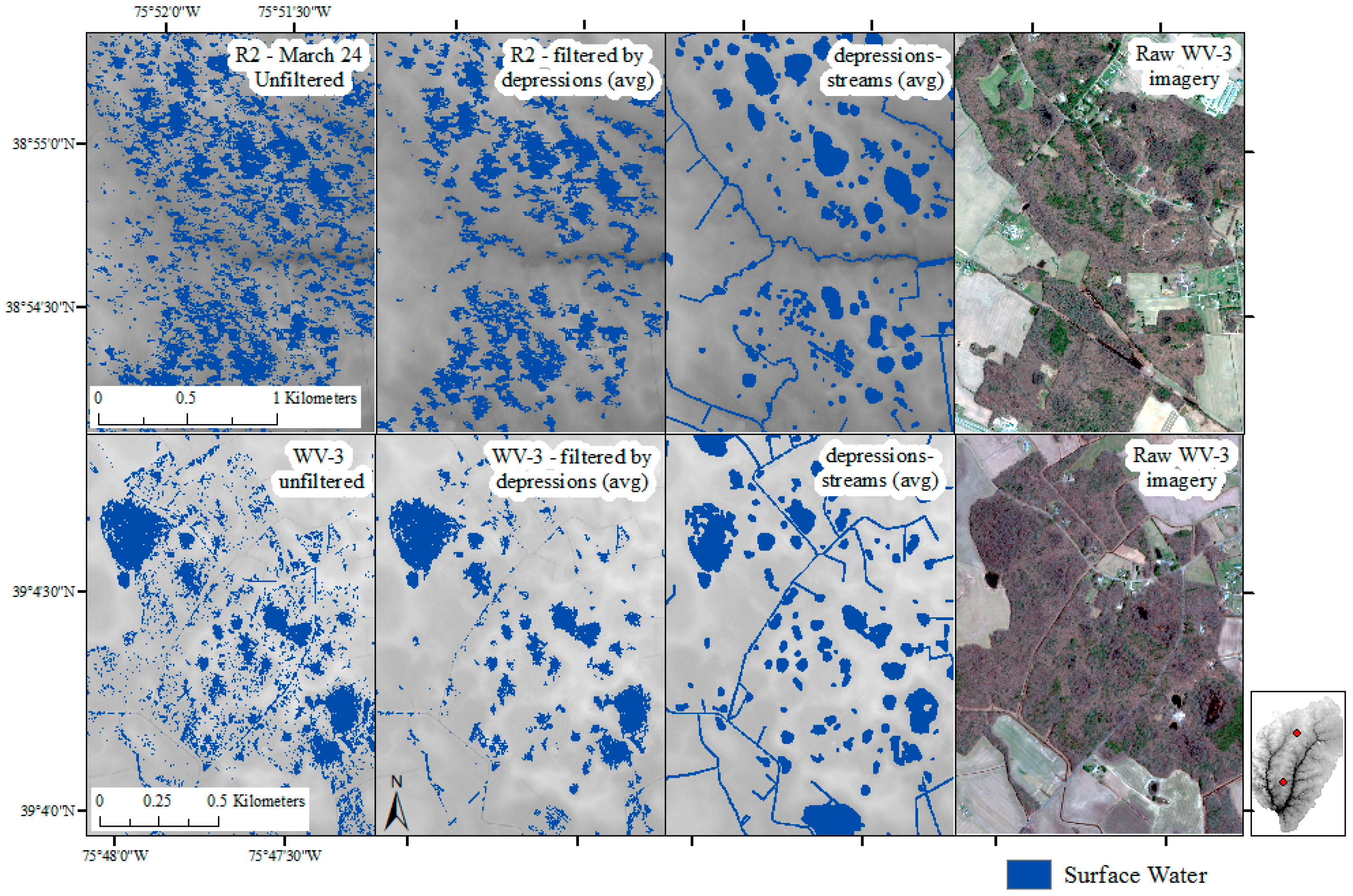
Alternatively, using lidar alone has been found to be highly effective to map inundation. Lang and McCarty [
46] demonstrated that lidar intensity values can be very effective and accurate (97% of inundated points identified correctly) to map inundation in forested Delmarva bays. However, lidar coverage is currently not complete within the U.S. or globally, and observations from airborne lidar are often not repeated once a mission is flown, limiting its ability to be used for regular monitoring of inundation. In light of this, we tested if one-time lidar data collections could be used to improve inundation maps collected at a different point in time. Although antecedent weather conditions at the time of the lidar data collection substantially influenced the count and total area classified as depressions, we found they performed similar when used as a filter applied to inundation maps. Filtering inundation maps by lidar-derived depressions reduced errors of commission, improving overall accuracy of Radarsat-2 maps by 5% on average and suggests that lidar data collections collected at one point in time could be used to improve a time series of inundation maps. We note, however, that the depression filter cannot be expected to perform as well when mapping inundation in wetland flats, relative to wetland depressions, which may explain the small increase in omission errors we observed after applying the filter. In addition to deriving depressions, we also tested incorporating an ETWI, also derived from a lidar DEM. Although it did not improve the random forest model as much as incorporating Worldview-3 imagery, incorporating both Worldview-3 and the ETWI produced the best surface water models, a finding consistent with others [
29,
30,
38] that topographic measures, in general, can improve efforts to map inundation.
The findings of this analysis are especially relevant as SAR imagery is rapidly becoming widely available. C-band SAR satellites, sponsored by the European Space Agency, have launched in recent years (Sentinel-1A was launched in April 2014, while Sentinel-1B was launched in April 2016). While others, such as the NASA-Isro Synthetic Aperture Radar (NISAR) satellite, a dual L-band and S-band satellite (launch planned for 2019–2020) are expected to become available in the near future. These satellites will provide continuous data collection at short return intervals and greatly improve our ability to map and monitor variation in surface water extent for forested wetlands. We hope that the approach presented here, which integrates SAR imagery with lidar DEMs and fine resolution imagery, can inform future efforts to utilize Sentinel and other satellites to detect surface water changes at greater spatial extents.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}