Figures of Merit for Indirect Time-of-Flight 3D Cameras: Definition and Experimental Evaluation


Abstract
:1. Introduction
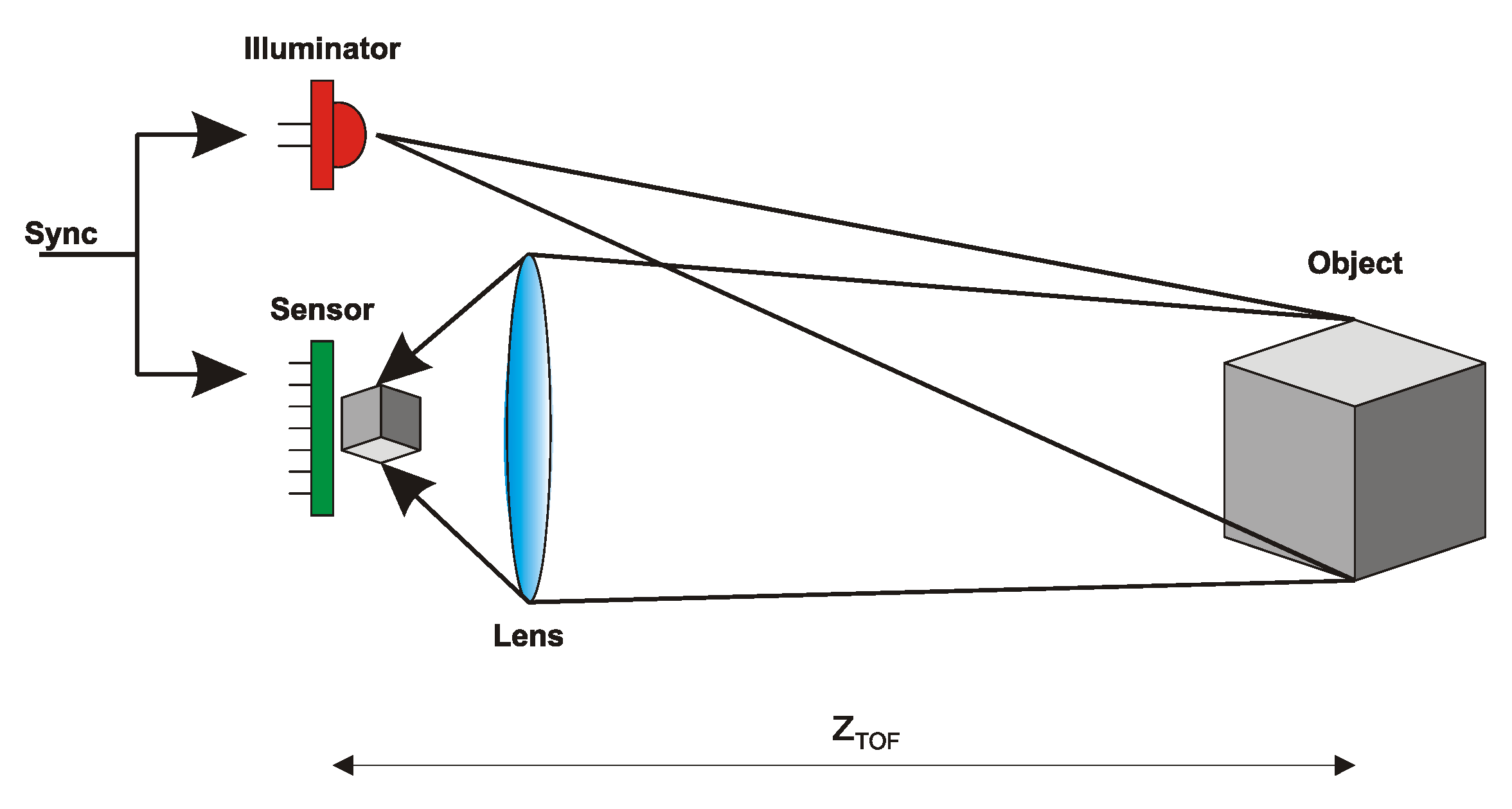
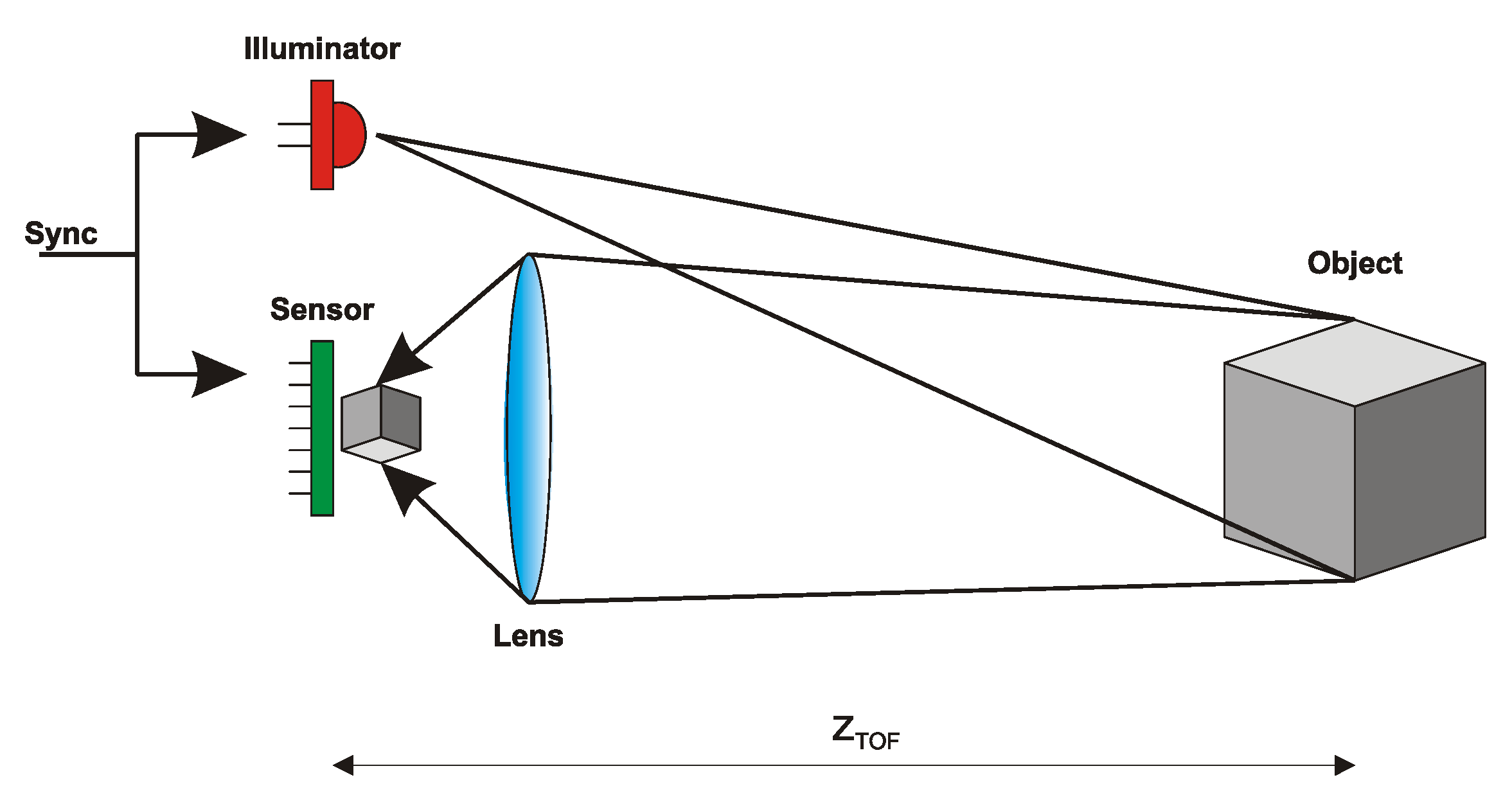
2. Model of an I-TOF Camera
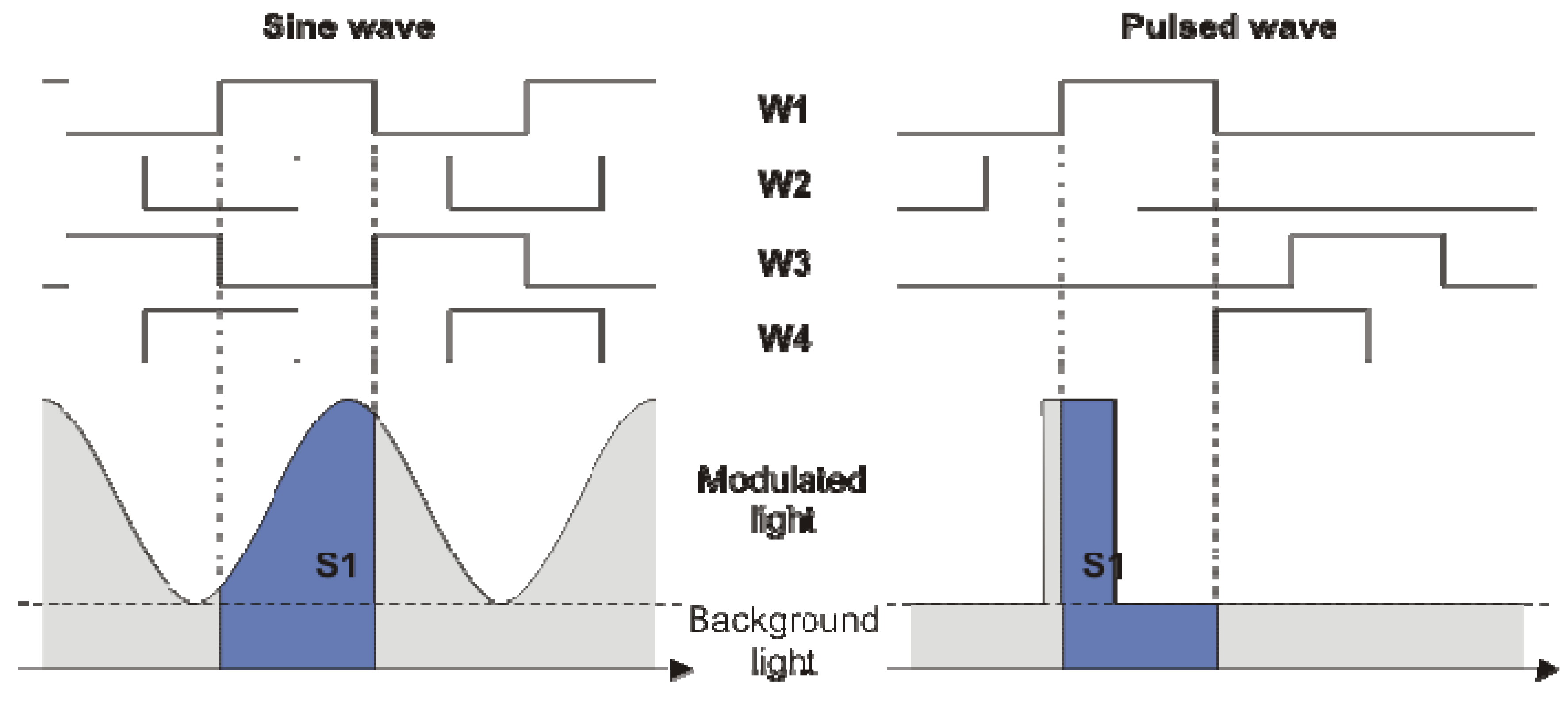
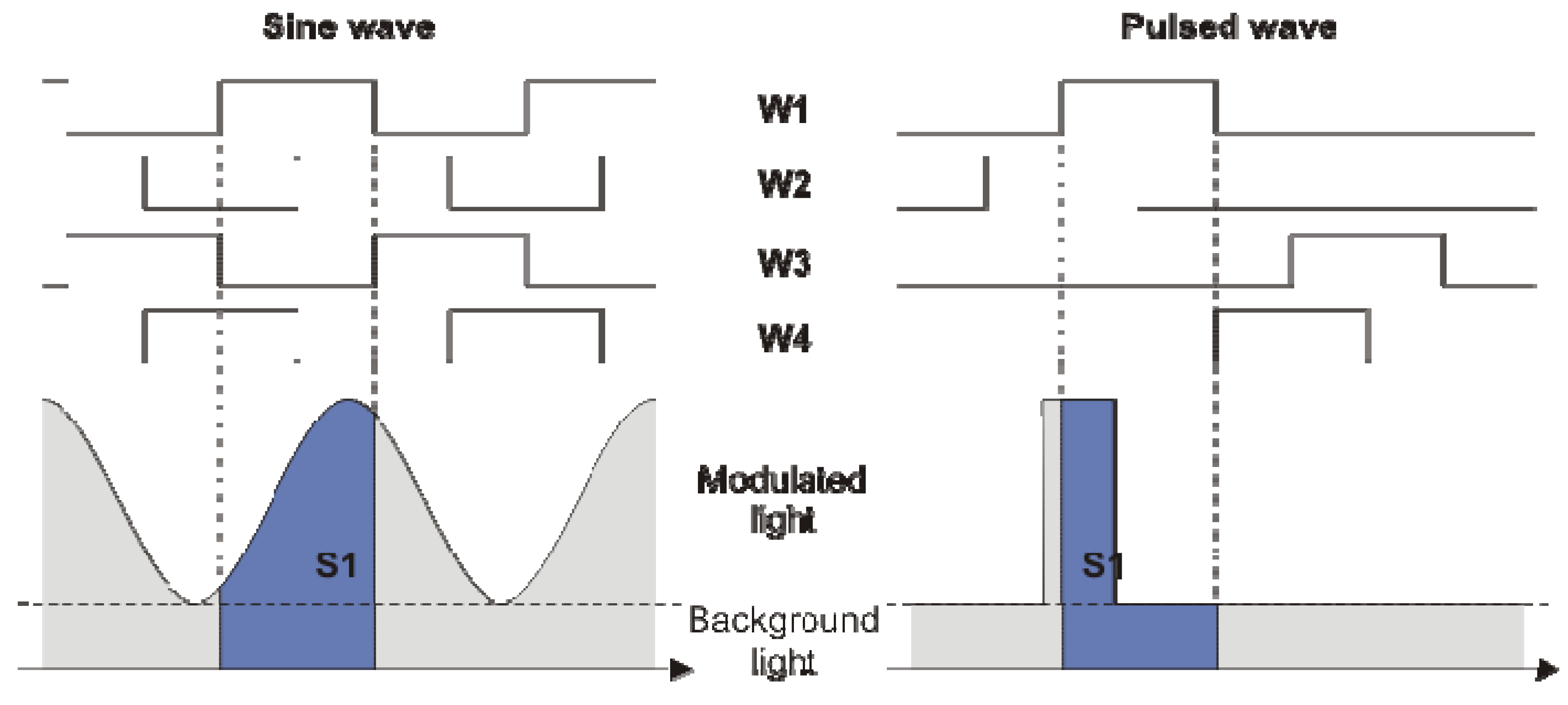
2.1. I-TOF Measurement and Power Budget
2.2. Noise of Distance Measurement
3. Figures of Merit
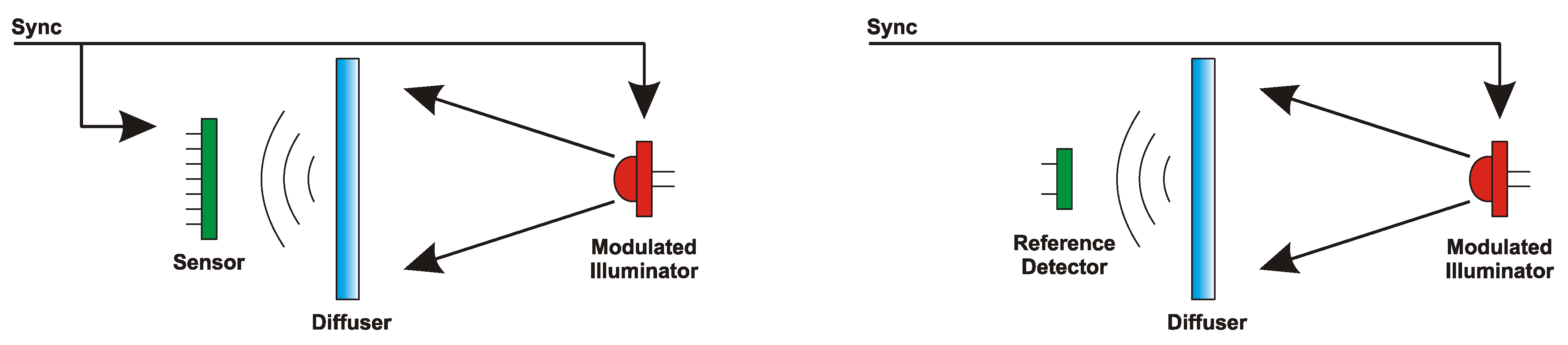
3.1. Correlated and Uncorrelated Power Responsivity

3.2. Noise-Equivalent Distance
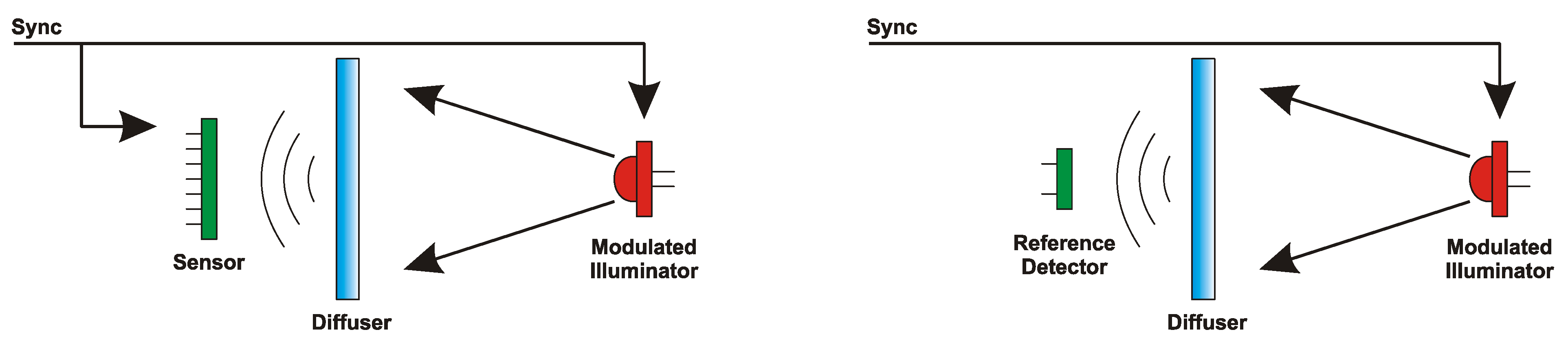
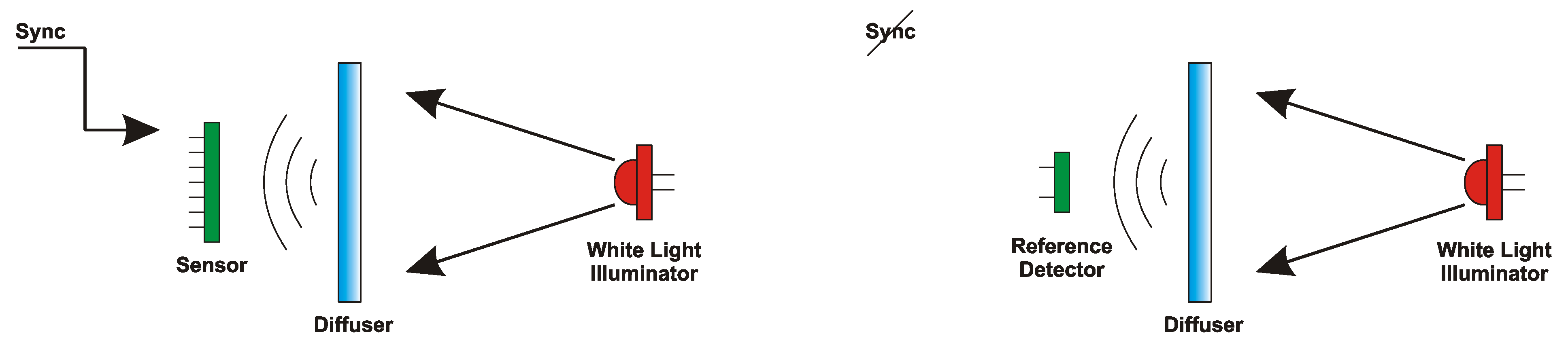
3.3. Background Light Rejection Ratio
4. Experimental Evaluation
4.1. Evaluation of 3D Sensor Based on Pulsed Technique

| Parameter | Value |
|---|---|
| QE | 0.2 |
| hc/λ | 2.21 × 10−19 J |
| q | 1.60 × 10−19 C |
| Ceq | 19 fF |
| Apix | 846.8 μm2 |
| FF | 0.34 |
| Nacc | 32…128 |
| Tframe | 18.3…35.9 ms |
| fmod-eq | 1.59 MHz |
| SNRmax | 170…85 |
4.2. Evaluation of 3D Sensor Based on Modulated Technique
| Parameter | Value |
|---|---|
| QE | 0.2 |
| hc/λ | 3.32 × 10−19 J |
| q | 1.60 × 10−19 C |
| Ceq | 5 fF |
| Apix | 100 μm2 |
| FF | 0.24 |
| Tint | 1…2 ms |
| Tframe | 92…96 ms |
| fmod-eq | 20 MHz |
| SNRmax | 21…24 |
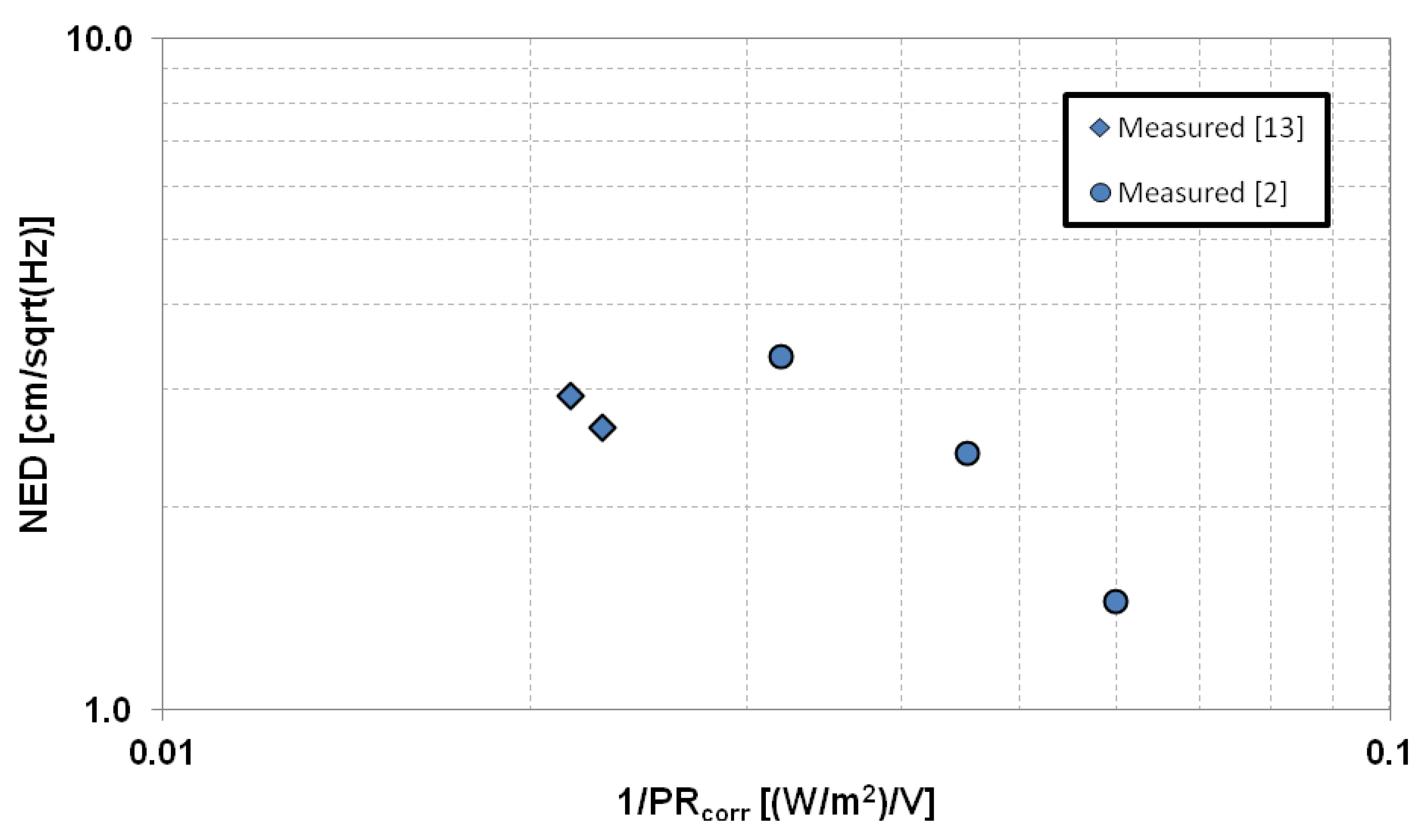
4.3. Comparison of Sensors

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
5. Conclusions
References and Notes
- Blais, F. Review of 20 years of range sensor development. J. Elect. Imaging 2004, 13, 231–243. [Google Scholar] [CrossRef]
- Perenzoni, M.; Massari, N.; Stoppa, D.; Pancheri, L.; Malfatti, M.; Gonzo, L. A 160 × 120-pixels range camera with in-pixel correlated double sampling and fixed-pattern noise correction. IEEE J. Solid-State Circ. 2011, 46, 1672–1681. [Google Scholar] [CrossRef]
- Zach, G.; Davidovic, M.; Zimmermann, H. A 16 × 16 pixel distance sensor with in-pixel circuitry that tolerates 150 klx of ambient light. IEEE J. Solid-State Circ. 2010, 45, 1345–1353. [Google Scholar] [CrossRef]
- Spirig, T.; Seitz, P.; Vietze, O.; Heitger, F. The lock-in CCD—Two dimensional synchronous detection of light. IEEE J. Quantum Elect. 1995, 31, 1705–1708. [Google Scholar] [CrossRef]
- Kawahito, S.; Halin, I.A.; Ushinaga, T.; Sawada, T.; Homma, M.; Maeda, Y. A CMOS time-of-flight range image sensor with gates-on-field-oxide structure. IEEE Sens. J. 2007, 7, 1578–1585. [Google Scholar] [CrossRef]
- Van Nieuwenhove, D.; van der Tempel, W.; Grootjans, R.; Stiens, J.; Kuijk, M. Photonic demodulator with sensitivity control. IEEE Sens. J. 2007, 7, 317–318. [Google Scholar] [CrossRef]
- Pancheri, L.; Stoppa, D.; Simoni, A. SPAD-Based Time-Gated Active Pixel for 3D Imaging Applications. In Proceedings of EOS Conference on Frontiers in Electronic Imaging, Munich, Germany, 15–17 June 2009.
- Stoppa, D.; Massari, N.; Pancheri, L.; Malfatti, M.; Perenzoni, M.; Gonzo, L. A range image sensor based on 10-um lock-in pixels in 0.18-um CMOS imaging technology. IEEE J. Solid-State Circ. 2011, 46, 248–258. [Google Scholar] [CrossRef]
- Mesa Imaging Website. Available online: http://www.mesa-imaging.ch (accessed on 15 November 2011).
- PMD Technologies Website. Available online: http://www.pmdtec.com (accessed on 15 November 2011).
- SoftKinetic Website. Available online: http://www.softkinetic.com (accessed on 15 November 2011).
- Fotonic Website. Available online: http://www.fotonic.com/ (accessed on 15 November 2011).
- Hafiane, M.L.; Wagner, W.; Dibi, Z.; Manck, O. Analysis and estimation of NEP and DR in CMOS TOF-3D image sensor based on MDSI. Sens. Actuat. A: Phys. 2011, 169, 66–73. [Google Scholar] [CrossRef]
- Pancheri, L.; Stoppa, D.; Massari, N.; Malfatti, M.; Gonzo, L.; Hossain, Q.D.; Dalla Betta, G.-F. A 120 × 160 pixel CMOS range image sensor based on current assisted photonic demodulators. Proc. SPIE 2010. [Google Scholar] [CrossRef]
© 2011 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Perenzoni, M.; Stoppa, D. Figures of Merit for Indirect Time-of-Flight 3D Cameras: Definition and Experimental Evaluation. Remote Sens. 2011, 3, 2461-2472. https://doi.org/10.3390/rs3112461
Perenzoni M, Stoppa D. Figures of Merit for Indirect Time-of-Flight 3D Cameras: Definition and Experimental Evaluation. Remote Sensing. 2011; 3(11):2461-2472. https://doi.org/10.3390/rs3112461
Chicago/Turabian StylePerenzoni, Matteo, and David Stoppa. 2011. "Figures of Merit for Indirect Time-of-Flight 3D Cameras: Definition and Experimental Evaluation" Remote Sensing 3, no. 11: 2461-2472. https://doi.org/10.3390/rs3112461