
The Potential of Optical UAS Data for Predicting Surface Soil Moisture in a Peatland across Time and Sites

 , , , and
, , , and
Abstract
:
1. Introduction
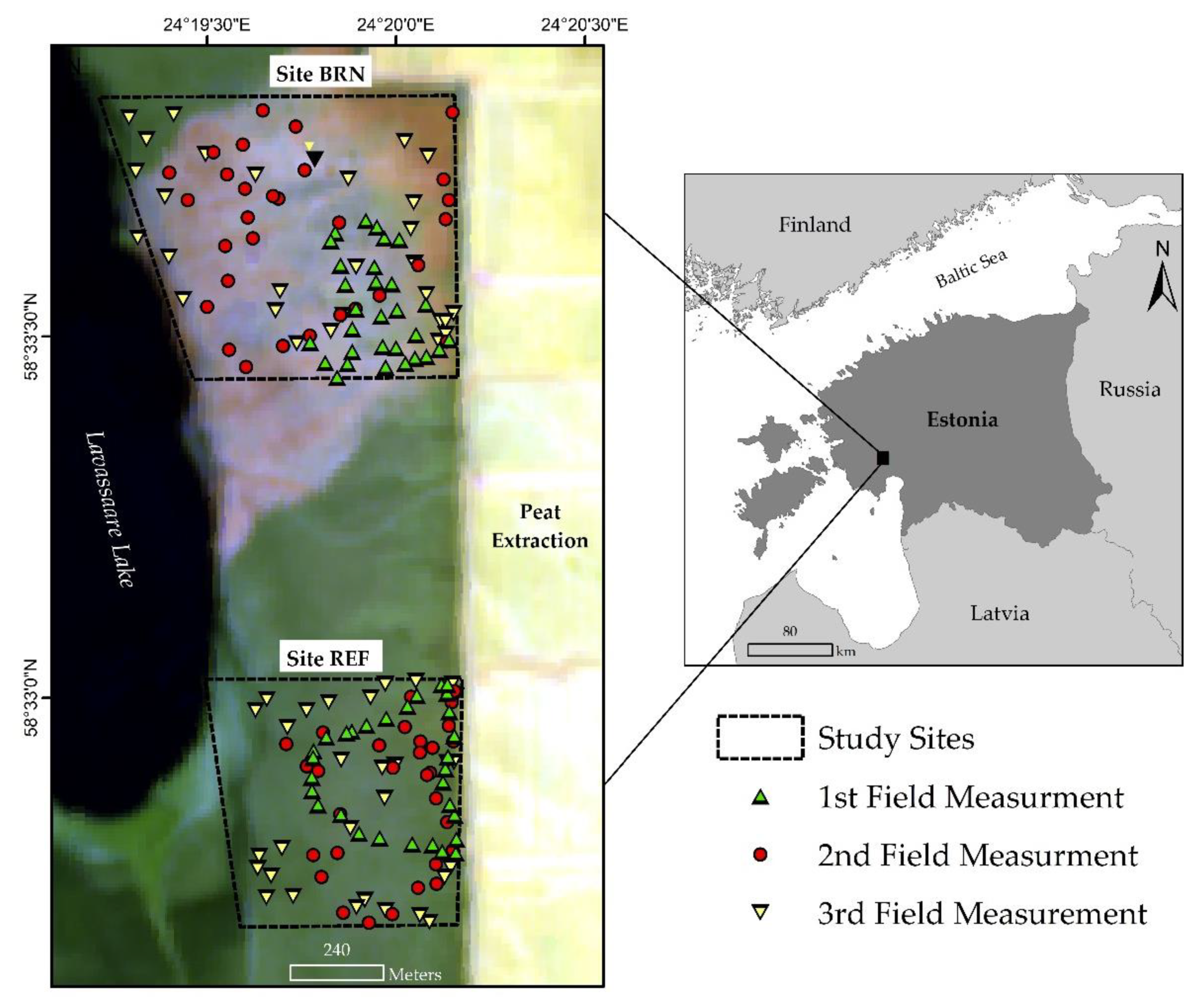
2. Study Area
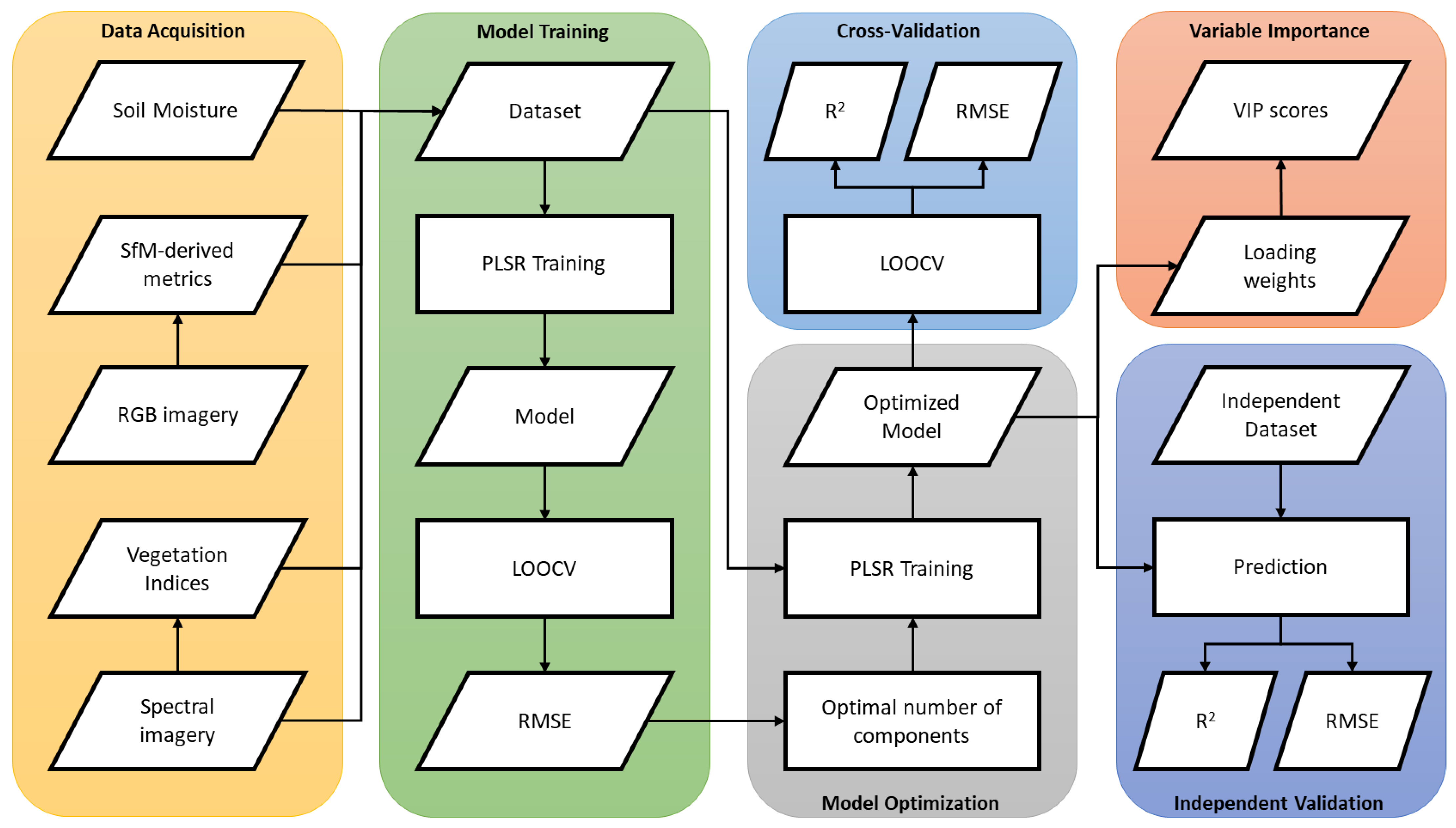
3. Methodology
3.1. Data Acquisition
3.2. Data Processing
3.3. Statistical Analyses
4. Results
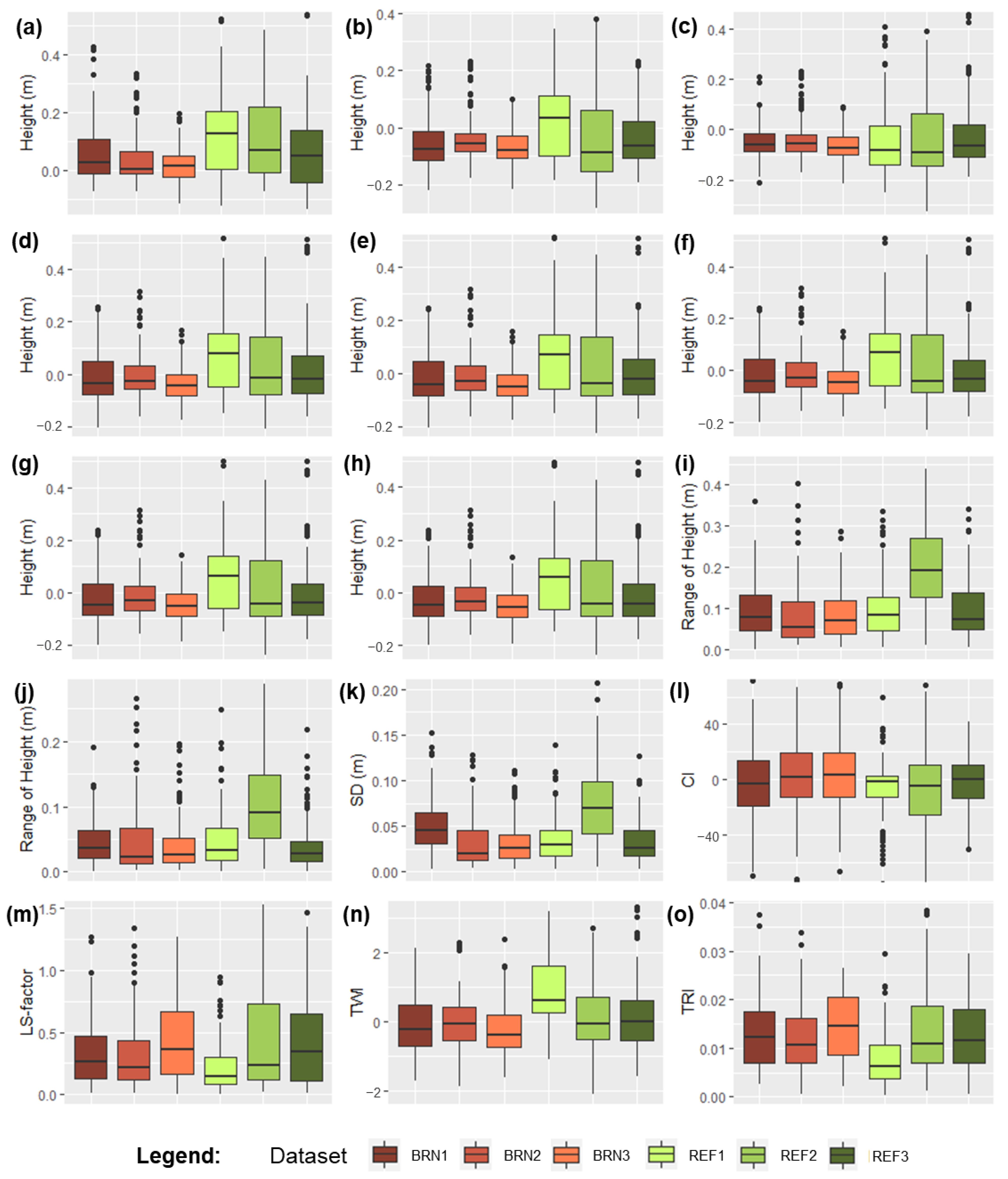
4.1. Description of the Sampled Data
4.2. Model Performance according to the Empirical Datasets
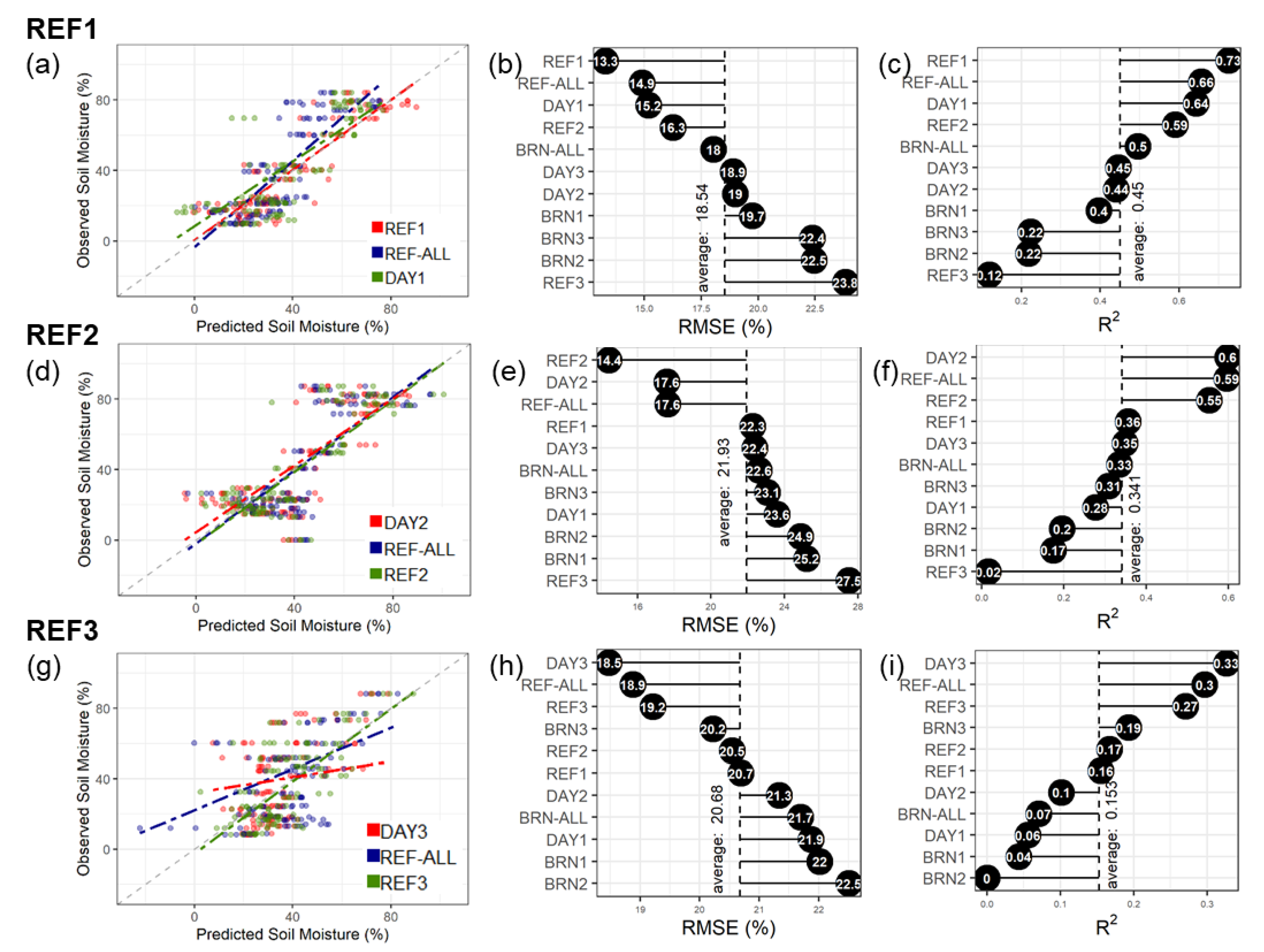
4.3. Model Assessment Using the Validation Datasets
5. Discussion
5.1. Models’ Ability for Predicting Soil Moisture Using Remote Sensing Optical Data
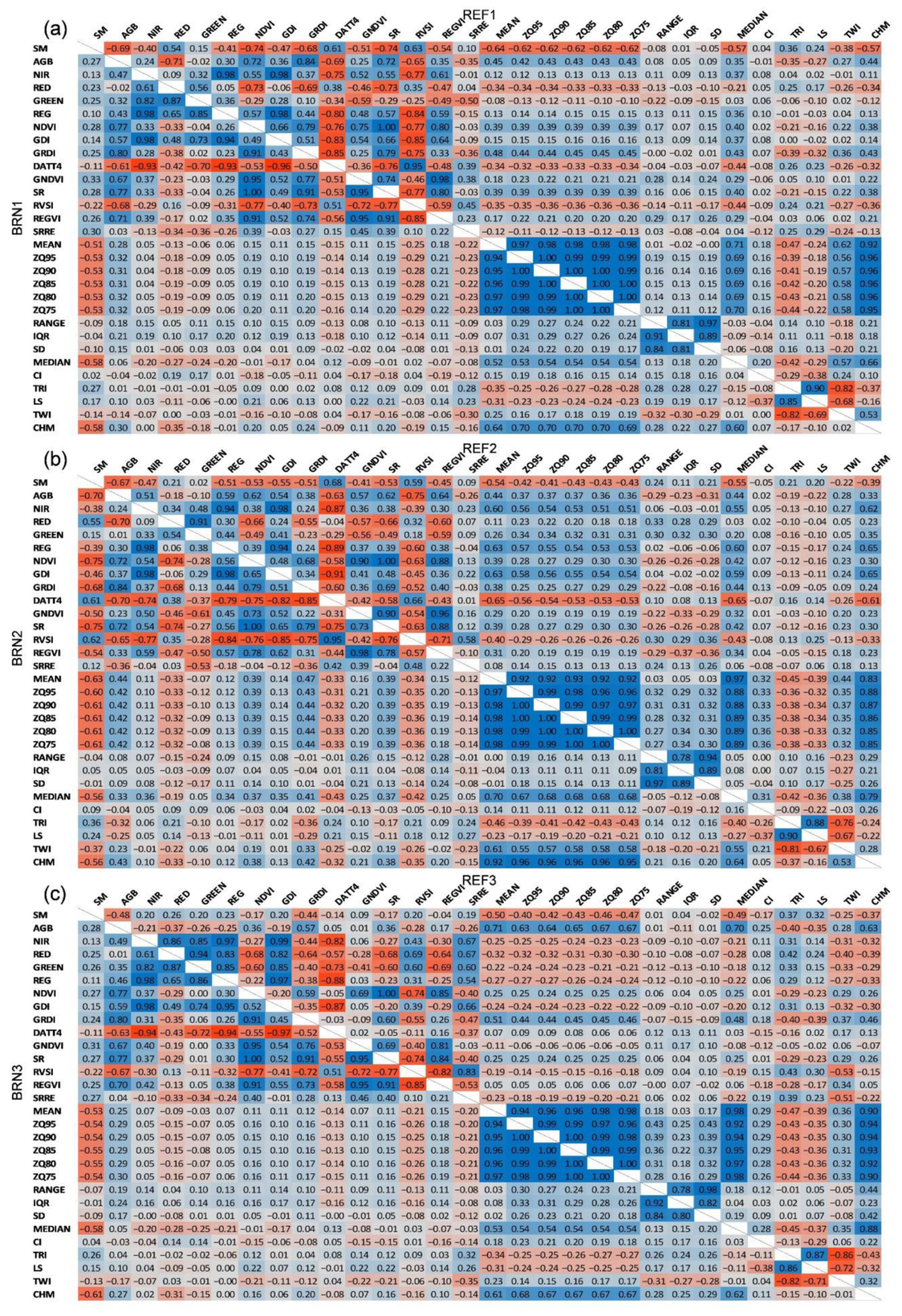
5.2. The Explanatory Importance of Spectral and SfM-Derived Datasets for Predicting Soil Moisture
5.3. The Transferability of Models across Dates and Sites
5.4. Implications for UAS-Based Soil Moisture Modeling and Monitoring, and Limitations in This Study
6. Conclusions
- (1)
- Microtopography and vegetation characteristics influenced SM. Following the effects of the wildfire on vegetation cover, plant health gradients had a higher influence on SM variability in the early phases of vegetation regeneration (e.g., BRN1 and DAY1). Similarly, individual SfM-derived metrics in this site had decreasing relevance over the monitoring period, with strong effect in models during the first two measurement dates (i.e., datasets BRN1 and BRN2), illustrating the influence of vegetation growth on the mechanisms of soil water distribution. On the other hand, physical gradients were more influential in more homogeneous conditions (i.e., site REF and date-merged datasets), illustrating its influence on SM spatial variability;
- (2)
- The performance of the partial least squares regression (PLSR) models based on optical data—namely spectral and SfM-derived metrics—was moderate but comparable with techniques (i.e., microwave and satellite-based) that are more complex and expensive. Compared to satellite-based approaches, UASs retrieve data at appropriate resolutions, allowing observation of processes and dynamics related to SM. As a result, these approaches may be able to overcome the impaired explanatory ability of satellite-borne sensors caused by their coarser spatial resolution;
- (3)
- A dominance of SfM-derived metrics for predictions over exposed surfaces. The application of theses metrics for monitoring SM seems to be a promising and effective alternative for evaluating the spatial distribution of SM over these surfaces. Thus, it suggests that a single, low-cost, and consumer-grade camera should be sufficient for rapid assessment at these sites. Moreover, it demonstrates that the spectral metrics might be meaningful proxies for providing indirect measures of temporal variation of moisture conditions, which explains the improved prediction accuracy of these models for REF datasets, even using external samples. In this situation, frameworks comprising two sensors could be appropriate for predicting SM in relatively preserved and uniformly vegetated environments; and
- (4)
- The models had unsatisfactory applicability across dates and places, particularly in highly heterogeneous locations. The best results in this regard were observed at the REF site, where vegetation structure was temporally and spatially more stable. Under those conditions, extra samples from different areas and time frames would likely improve prediction accuracy. Increasing the sample size to include the full range of SM values can reduce the uncertainties caused by the complexity of SM relationships. Therefore, we recommend developing specific models or carrying out field measurements of SM in every monitoring step to include in merged models.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ahmed, M.; Else, B.; Eklundh, L.; Ardö, J.; Seaquist, J. Dynamic response of NDVI to soil moisture variations during different hydrological regimes in the sahel region. Int. J. Remote Sens. 2017, 38, 5408–5429. [Google Scholar] [CrossRef]
- Wang, L.; Qu, J.J. Satellite remote sensing applications for surface soil moisture monitoring: A review. Front. Earth Sci. China 2009, 3, 237–247. [Google Scholar] [CrossRef]
- Xu, X.; Zhang, Q.; Tan, Z.; Li, Y.; Wang, X. Effects of water-table depth and soil moisture on plant biomass, diversity, and distribution at a seasonally flooded wetland of Poyang Lake, China. Chin. Geogr. Sci. 2015, 25, 739–756. [Google Scholar] [CrossRef]
- Damm, A.; Paul-Limoges, E.; Haghighi, E.; Simmer, C.; Morsdorf, F.; Schneider, F.D.; van der Tol, C.; Migliavacca, M.; Rascher, U. Remote sensing of plant-water relations: An overview and future perspectives. J. Plant Physiol. 2018, 227, 3–19. [Google Scholar] [CrossRef]
- Liu, L.; Gudmundsson, L.; Hauser, M.; Qin, D.; Li, S.; Seneviratne, S.I. Soil moisture dominates dryness stress on ecosystem production globally. Nat. Commun. 2020, 11, 4892. [Google Scholar] [CrossRef] [PubMed]
- Brocca, L.; Ciabatta, L.; Massari, C.; Camici, S.; Tarpanelli, A. Soil moisture for hydrological applications: Open questions and new opportunities. Water 2017, 9, 140. [Google Scholar] [CrossRef]
- Joiner, J.; Yoshida, Y.; Anderson, M.; Holmes, T.; Hain, C.; Reichle, R.; Koster, R.; Middleton, E.; Zeng, F.W. Global relationships among traditional reflectance vegetation indices (NDVI and NDII), evapotranspiration (ET), and soil moisture variability on weekly timescales. Remote Sens. Environ. 2018, 219, 339–352. [Google Scholar] [CrossRef] [Green Version]
- Orru, M.; Ots, K.; Orru, H. Re-vegetation processes in cutaway peat production fields in Estonia in relation to peat quality and water regime. Environ. Monit. Assess. 2016, 188, 655. [Google Scholar] [CrossRef]
- Fenner, N.; Freeman, C. Drought-induced carbon loss in peatlands. Nat. Geosci. 2011, 4, 895–900. [Google Scholar] [CrossRef]
- Grau-Andrés, R.; Davies, G.M.; Gray, A.; Scott, E.M.; Waldron, S. Fire severity is more sensitive to low fuel moisture content on Calluna heathlands than on peat bogs. Sci. Total Environ. 2018, 616–617, 1261–1269. [Google Scholar] [CrossRef] [Green Version]
- Sharma, S.; Carlson, J.D.; Krueger, E.S.; Engle, D.M.; Twidwell, D.; Fuhlendorf, S.D.; Patrignani, A.; Feng, L.; Ochsner, T.E. Soil moisture as an indicator of growing-season herbaceous fuel moisture and curing rate in grasslands. Int. J. Wildl. Fire 2020, 30, 57–69. [Google Scholar] [CrossRef]
- Kimmel, K.; Mander, Ü. Ecosystem services of peatlands: Implications for restoration. Prog. Phys. Geogr. 2010, 34, 491–514. [Google Scholar] [CrossRef]
- Nijp, J.J.; Metselaar, K.; Limpens, J.; Teutschbein, C.; Peichl, M.; Nilsson, M.B.; Berendse, F.; van der Zee, S.E.A.T.M. Including hydrological self-regulating processes in peatland models: Effects on peatmoss drought projections. Sci. Total Environ. 2017, 580, 1389–1400. [Google Scholar] [CrossRef] [PubMed]
- Davies, G.M.; Legg, C.J. Regional variation in fire weather controls the reported occurrence of Scottish wildfires. PeerJ 2016, 4, e2649. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Roulet, N.T.; Lafleur, P.M.; Richard, P.J.H.; Moore, T.R.; Humphreys, E.R.; Bubier, J. Contemporary carbon balance and late Holocene carbon accumulation in a northern peatland. Glob. Chang. Biol. 2007, 13, 397–411. [Google Scholar] [CrossRef] [Green Version]
- Turetsky, M.R.; Donahue, W.F.; Benscoter, B.W. Experimental drying intensifies burning and carbon losses in a northern peatland. Nat. Commun. 2011, 2, 514. [Google Scholar] [CrossRef]
- Fatichi, S.; Katul, G.G.; Ivanov, V.Y.; Pappas, C.; Paschalis, A.; Consolo, A.; Kim, J.; Burlando, P. Abiotic and biotic controls of soil moisture spatiotemporal variability and the occurrence of hysteresis. Water Resour. Res. 2015, 51, 3505–3524. [Google Scholar] [CrossRef]
- Wigmore, O.; Mark, B.; McKenzie, J.; Baraer, M.; Lautz, L. Sub-metre mapping of surface soil moisture in proglacial valleys of the tropical Andes using a multispectral unmanned aerial vehicle. Remote Sens. Environ. 2019, 222, 104–118. [Google Scholar] [CrossRef]
- Rahimzadeh-Bajgiran, P.; Berg, A.A.; Champagne, C.; Omasa, K. Estimation of soil moisture using optical/thermal infrared remote sensing in the Canadian Prairies. ISPRS J. Photogramm. Remote Sens. 2013, 83, 94–103. [Google Scholar] [CrossRef]
- Srivastava, A.; Saco, P.M.; Rodriguez, J.F.; Kumari, N.; Chun, K.P.; Yetemen, O. The role of landscape morphology on soil moisture variability in semi-arid ecosystems. Hydrol. Process. 2021, 35, e13990. [Google Scholar] [CrossRef]
- Millard, K.; Thompson, D.K.; Parisien, M.A.; Richardson, M. Soil moisture monitoring in a temperate peatland using multi-sensor remote sensing and linear mixed effects. Remote Sens. 2018, 10, 903. [Google Scholar] [CrossRef] [Green Version]
- Petropoulos, G.P.; Ireland, G.; Barrett, B. Surface soil moisture retrievals from remote sensing: Current status, products & future trends. Phys. Chem. Earth 2015, 83–84, 36–56. [Google Scholar] [CrossRef]
- Lu, F.; Sun, Y.; Hou, F. Using UAV visible images to estimate the soil moisture of steppe. Water 2020, 12, 2334. [Google Scholar] [CrossRef]
- Zhang, D.; Zhou, G. Estimation of soil moisture from optical and thermal remote sensing: A review. Sensors 2016, 16, 1308. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Araya, S.N.; Fryjoff-hung, A.; Anderson, A.; Viers, J.H.; Ghezzehei, T.A. Advances in Soil Moisture Retrieval from Multispectral Remote Sensing Using Unmanned Aircraft Systems and Machine Learning Techniques. Hydrol. Earth Syst. Sci. 2021, 25, 2739–2758. [Google Scholar] [CrossRef]
- Senyurek, V.; Farhad, M.; Gurbuz, A.C.; Kurum, M.; Moorhead, R. SoilMoistureMapper: A GNSS-R approach for soil moisture retrieval on UAV. In AI for Agriculture and Food Systems; Association for the Advancement of Artificial Intelligence: Menlo Park, CA, USA, 2021. [Google Scholar]
- Amani, M.; Salehi, B.; Mahdavi, S.; Masjedi, A.; Dehnavi, S. Temperature-Vegetation-soil Moisture Dryness Index (TVMDI). Remote Sens. Environ. 2017, 197, 1–14. [Google Scholar] [CrossRef]
- Hajdu, I.; Yule, I.; Dehghan-shoar, M.H. Modelling of Near-Surface Soil Moisture Using Machine Learning and Multi-Temporal Sentinel 1 Images in New Zealand. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 1–5. [Google Scholar] [CrossRef]
- West, H.; Quinn, N.; Horswell, M.; White, P. Assessing vegetation response to soil moisture fluctuation under extreme drought using sentinel-2. Water 2018, 10, 838. [Google Scholar] [CrossRef] [Green Version]
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a green channel in remote sensing of global vegetation from EOS- MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Rastogi, A.; Stróżecki, M.; Kalaji, H.M.; Łuców, D.; Lamentowicz, M.; Juszczak, R. Impact of warming and reduced precipitation on photosynthetic and remote sensing properties of peatland vegetation. Environ. Exp. Bot. 2019, 160, 71–80. [Google Scholar] [CrossRef]
- Rouse, J.H.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in the Great Plains with ERTS. In Proceedings of the Third Earth Resources Technology Satellite-1 Symposium, Greenbelt, MD, USA, 10–14 December 1973; pp. 3010–3017. [Google Scholar]
- Moore, P.A.; Lukenbach, M.C.; Thompson, D.K.; Kettridge, N.; Granath, G.; Waddington, J.M. Assessing the peatland hummock-hollow classification framework using high-resolution elevation models: Implications for appropriate complexity ecosystem modeling. Biogeosciences 2019, 16, 3491–3506. [Google Scholar] [CrossRef] [Green Version]
- Iglhaut, J.; Cabo, C.; Puliti, S.; Piermattei, L.; Connor, J.O.; Rosette, J. Structure from Motion Photogrammetry in Forestry: A Review. Curr. For. Rep. 2019, 5, 155–168. [Google Scholar] [CrossRef] [Green Version]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Lendzioch, T.; Langhammer, J.; Vlček, L.; Minařík, R. Mapping the groundwater level and soil moisture of a montane peat bog using uav monitoring and machine learning. Remote Sens. 2021, 13, 907. [Google Scholar] [CrossRef]
- Ge, X.; Wang, J.; Ding, J.; Cao, X.; Zhang, Z.; Liu, J.; Li, X. Combining UAV-based hyperspectral imagery and machine learning algorithms for soil moisture content monitoring. PeerJ 2019, 7, e6926. [Google Scholar] [CrossRef] [PubMed]
- Mendez, K.M.; Broadhurst, D.I.; Reinke, S.N. Migrating from partial least squares discriminant analysis to artificial neural networks: A comparison of functionally equivalent visualisation and feature contribution tools using jupyter notebooks. Metabolomics 2020, 16, 17. [Google Scholar] [CrossRef] [Green Version]
- Cheng, M.; Jiao, X.; Liu, Y.; Shao, M.; Yu, X.; Bai, Y.; Wang, Z.; Wang, S.; Tuohuti, N.; Liu, S.; et al. Estimation of soil moisture content under high maize canopy coverage from UAV multimodal data and machine learning. Agric. Water Manag. 2022, 264, 107530. [Google Scholar] [CrossRef]
- Abdi, H. Partial Least Square Regression. In Encyclopedia of Measurement and Statistics; Salkind, N.J., Ed.; Sage: Thousand Oaks CA, USA, 2007; pp. 741–744. ISBN 9781412916110. [Google Scholar]
- Maimaitiyiming, M.; Ghulam, A.; Bozzolo, A.; Wilkins, J.L.; Kwasniewski, M.T. Early detection of plant physiological responses to different levels of water stress using reflectance spectroscopy. Remote Sens. 2017, 9, 745. [Google Scholar] [CrossRef] [Green Version]
- Haenlein, M.; Kaplan, A.M. A beginner’s guide to partial least squares analysis, Understanding Statistics”. Statistical Issues in Psychology and Social Sciences, Volume 3. Underst. Stat. 2004, 3, 283–297. [Google Scholar] [CrossRef]
- Carrascal, L.M.; Galván, I.; Gordo, O. Partial least squares regression as an alternative to current regression methods used in ecology. Oikos 2009, 118, 681–690. [Google Scholar] [CrossRef]
- Ainiwaer, M.; Ding, J.; Kasim, N.; Wang, J.; Wang, J. Regional scale soil moisture content estimation based on multi-source remote sensing parameters. Int. J. Remote Sens. 2020, 41, 3346–3367. [Google Scholar] [CrossRef]
- Puliti, S.; Saarela, S.; Gobakken, T.; Ståhl, G.; Næsset, E. Combining UAV and Sentinel-2 auxiliary data for forest growing stock volume estimation through hierarchical model-based inference. Remote Sens. Environ. 2018, 204, 485–497. [Google Scholar] [CrossRef]
- Paal, J. Jääksood, Nende Kasutamine ja Korrastamine, 1st ed.; Paal, J., Ed.; Eesti Turbaliit: Tartu, Estonia, 2011; ISBN 978-9949-30-038-9. [Google Scholar]
- Estonian Weather Service Climate Normals. Available online: http://www.ilmateenistus.ee/kliima/kliimanormid/ohutemperatuur/?lang=en (accessed on 18 May 2021).
- Ward, R.D.; Burnside, N.G.; Joyce, C.B.; Sepp, K. Importance of Microtopography in Determining Plant Community Distribution in Baltic Coastal Wetlands. J. Coast. Res. 2016, 32, 1062–1070. [Google Scholar] [CrossRef]
- Burnside, N.G.; Joyce, C.B.; Puurmann, E.; Scott, D.M. Use of vegetation classification and plant indicators to assess grazing abandonment in Estonian coastal wetlands. J. Veg. Sci. 2007, 18, 645–654. [Google Scholar] [CrossRef]
- Berg, M.; Joyce, C.; Burnside, N. Differential responses of abandoned wet grassland plant communities to reinstated cutting management. Hydrobiologia 2012, 692, 83–97. [Google Scholar] [CrossRef]
- Kargas, G.; Kerkides, P.; Seyfried, M.; Sgoumbopoulou, A. WET Sensor Performance in Organic and Inorganic Media with Heterogeneous Moisture Distribution. Soil Sci. Soc. Am. J. 2011, 75, 1244–1252. [Google Scholar] [CrossRef]
- Metsar, J.; Kollo, K.; Ellmann, A. Modernization of the estonian national gnss reference station network. Geod. Cartogr. 2018, 44, 55–62. [Google Scholar] [CrossRef] [Green Version]
- Tomaštík, J.; Mokroš, M.; Surový, P.; Grznárová, A.; Merganič, J. UAV RTK / PPK Method—An Optimal Solution for Mapping Inaccessible Forested Areas? Remote Sens. 2019, 11, 721. [Google Scholar] [CrossRef] [Green Version]
- Dandois, J.P.; Olano, M.; Ellis, E.C. Optimal Altitude, Overlap, and Weather Conditions for Computer Vision UAV Estimates of Forest Structure. Remote Sens. 2015, 7, 13895–13920. [Google Scholar] [CrossRef] [Green Version]
- Fraser, B.T.; Congalton, R.G. Issues in Unmanned Aerial Systems (UAS) Data Collection of Complex Forest Environments. Remote Sens. 2018, 10, 908. [Google Scholar] [CrossRef] [Green Version]
- Daniel Girardeau-Montaut. CloudCompare. 2020. Available online: https://www.danielgm.net/cc/ (accessed on 1 December 2020).
- Roussel, J.-R.; Auty, D. lidR: Airborne LiDAR Data Manipulation and Visualization for Forestry Applications. 2019. Available online: https://cran.r-project.org/web/packages/lidR/lidR.pdf (accessed on 1 December 2020).
- R Core Team. A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2018; Available online: https://www.R-project.org (accessed on 21 December 2018).
- Moser, K.; Ahn, C.; Noe, G. Characterization of microtopography and its influence on vegetation patterns in created wetlands. Wetlands 2007, 27, 1081–1097. [Google Scholar] [CrossRef]
- Conrad, O.; Bechtel, B.; Bock, M.; Dietrich, H.; Fischer, E.; Gerlitz, L.; Wehberg, J.; Wichmann, V.; Böhner, J. System for Automated Geoscientific Analyses (SAGA) v. 2.1.4. Geosci. Model Dev. 2015, 8, 1991–2007. [Google Scholar] [CrossRef] [Green Version]
- Jordan, C.F. Derivation of Leaf-Area Index from Quality of Light on the Forest Floor. Ecology 1969, 50, 663–666. [Google Scholar] [CrossRef]
- Gianelle, D.; Vescovo, L. Determination of green herbage ratio in grasslands using spectral reflectance. Methods and ground measurements. Int. J. Remote Sens. 2007, 28, 931–942. [Google Scholar] [CrossRef]
- Gitelson, A.; Merzlyak, M.N. Spectral Reflectance Changes Associated with Autumn Senescence Features and Relation to Chlorophyll Estimation. J. Plant Physiol. 1994, 143, 286–292. [Google Scholar] [CrossRef]
- Mishra, S.; Datta-Gupta, A. Data-Driven Modeling. In Applied Statistical Modeling and Data Analytics: A Practical Guide for the Petroleum Geosciences; Elsevier: Amsterdam, The Netherlands, 2018; pp. 195–224. [Google Scholar] [CrossRef]
- Sims, D.A.; Gamon, J.A. Relationships between leaf pigment content and spectral reflectance across a wide range of species, leaf structures and developmental stages. Remote Sens. Environ. 2002, 81, 337–354. [Google Scholar] [CrossRef]
- Delegido, J.; Verrelst, J.; Meza, C.M.; Rivera, J.P.; Alonso, L.; Moreno, J. A red-edge spectral index for remote sensing estimation of green LAI over agroecosystems. Eur. J. Agron. 2013, 46, 42–52. [Google Scholar] [CrossRef]
- Mevik, B.-H.; Wehrens, R.; Liland, K.H. pls: Partial Least Squares and Principal Component Regression. 2020. Available online: https://cran.r-project.org/web/packages/pls/pls.pdf (accessed on 8 February 2022).
- Kachamba, D.J.; Ørka, H.O.; Gobakken, T.; Eid, T.; Mwase, W. Biomass Estimation Using 3D Data from Unmanned Aerial Vehicle Imagery in a Tropical Woodland. Remote Sens. 2016, 8, 968. [Google Scholar] [CrossRef] [Green Version]
- Li, K.Y.; Burnside, N.G.; de Lima, R.S.; Peciña, M.V.; Sepp, K.; Yang, M.; Der Raet, J.; Vain, A.; Selge, A.; Sepp, K. The application of an unmanned aerial system and machine learning techniques for red clover-grass mixture yield estimation under variety performance trials. Remote Sens. 2021, 13, 1994. [Google Scholar] [CrossRef]
- Mevik, B.H.; Cederkvist, H.R. Mean squared error of prediction (MSEP) estimates for principal component regression (PCR) and partial least squares regression (PLSR). J. Chemom. 2004, 18, 422–429. [Google Scholar] [CrossRef]
- Mehmood, T.; Liland, K.H.; Snipen, L.; Sæbø, S. A review of variable selection methods in Partial Least Squares Regression. Chemom. Intell. Lab. Syst. 2012, 118, 62–69. [Google Scholar] [CrossRef]
- Galindo-Prieto, B.; Eriksson, L.; Trygg, J. Variable influence on projection (VIP) for orthogonal projections to latent structures (OPLS). J. Chemom. 2014, 28, 623–632. [Google Scholar] [CrossRef]
- Engstrom, R.; Hope, A.; Kwon, H.; Stow, D. The relationship between soil moisture and NDVI near Barrow, Alaska. Phys. Geogr. 2008, 29, 38–53. [Google Scholar] [CrossRef]
- Amani, M.; Parsian, S.; MirMazloumi, S.M.; Aieneh, O. Two new soil moisture indices based on the NIR-red triangle space of Landsat-8 data. Int. J. Appl. Earth Obs. Geoinf. 2016, 50, 176–186. [Google Scholar] [CrossRef]
- Wyatt, B.M.; Ochsner, T.E.; Zou, C.B. Estimating root zone soil moisture across diverse land cover types by integrating in-situ and remotely sensed data. Agric. For. Meteorol. 2021, 307, 108471. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Vabalas, A.; Gowen, E.; Poliakoff, E.; Casson, A.J. Machine learning algorithm validation with a limited sample size. PLoS ONE 2019, 14, e0224365. [Google Scholar] [CrossRef]
- Cresto Aleina, F.; Runkle, B.R.K.; Kleinen, T.; Kutzbach, L.; Schneider, J.; Brovkin, V. Modeling micro-topographic controls on boreal peatland hydrology and methane fluxes. Biogeosciences 2015, 12, 5689–5704. [Google Scholar] [CrossRef] [Green Version]
- Enwright, N.M.; Kranenburg, C.J.; Patton, B.A.; Dalyander, P.S.; Brown, J.A.; Piazza, S.C.; Cheney, W.C. Developing bare-earth digital elevation models from structure-from-motion data on barrier islands. ISPRS J. Photogramm. Remote Sens. 2021, 180, 269–282. [Google Scholar] [CrossRef]
- Graham, J.D.; Glenn, N.F.; Spaete, L.P.; Hanson, P.J. Characterizing Peatland Microtopography Using Gradient and Microform-Based Approaches. Ecosystems 2020, 23, 1464–1480. [Google Scholar] [CrossRef] [Green Version]
- Perry, E.M.; Roberts, D.A. Sensitivity of narrow-band and broad-band indices for assessing nitrogen availability and water stress in an annual crop. Agron. J. 2008, 100, 1211–1219. [Google Scholar] [CrossRef] [Green Version]
- Cross, M.D.; Scambos, T.; Pacifici, F.; Marshall, W.E. Determining Effective Meter-Scale Image Data and Spectral Vegetation Indices for Tropical Forest Tree Species Differentiation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 2934–2943. [Google Scholar] [CrossRef]
- Hunt, E.R.; Cavigelli, M.; Daughtry, C.S.T.; McMurtrey, J.E.; Walthall, C.L. Evaluation of digital photography from model aircraft for remote sensing of crop biomass and nitrogen status. Precis. Agric. 2005, 6, 359–378. [Google Scholar] [CrossRef]
- Hunt, E.R.; Doraiswamy, P.C.; McMurtrey, J.E.; Daughtry, C.S.T.; Perry, E.M.; Akhmedov, B. A visible band index for remote sensing leaf chlorophyll content at the Canopy scale. Int. J. Appl. Earth Obs. Geoinf. 2012, 21, 103–112. [Google Scholar] [CrossRef] [Green Version]
- Fernández-Manso, A.; Fernández-Manso, O.; Quintano, C. SENTINEL-2A red-edge spectral indices suitability for discriminating burn severity. Int. J. Appl. Earth Obs. Geoinf. 2016, 50, 170–175. [Google Scholar] [CrossRef]
- Kettridge, N.; Humphrey, R.E.; Smith, J.E.; Lukenbach, M.C.; Devito, K.J.; Petrone, R.M.; Waddington, J.M. Burned and unburned peat water repellency: Implications for peatland evaporation following wildfire. J. Hydrol. 2014, 513, 335–341. [Google Scholar] [CrossRef]
- Uyeda, K.A.; Stow, D.A.; Roberts, D.A.; Riggan, P.J. Combining ground-based measurements and MODIS-based spectral vegetation indices to track biomass accumulation in post-fire chaparral. Int. J. Remote Sens. 2017, 38, 728–741. [Google Scholar] [CrossRef]
- Abdi, H.; Williams, L.J. Partial Least Squares Methods: Partial Least Squares Correlation and Partial Least Square Regression. In Computational Toxicology: Volume II; Reisfeld, B., Mayeno, A.N., Eds.; Humana Press: Totowa, NJ, USA, 2013; pp. 549–579. ISBN 978-1-62703-059-5. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | 7-Day Rainfall Accumulation (mm) | Average Air Temperature (°C) | Average Relative Humidity (%) | Sensor | Site | Starting Time (UTC) |
|---|---|---|---|---|---|---|
| 16 July 2020 | 2.6 | 18.7 | 60 | SODA | BRN | 7:50 |
| Sequoia | BRN | 8:53 | ||||
| SODA | REF | 12:57 | ||||
| Sequoia | REF | 13:36 | ||||
| 25 September 2020 | 5.9 | 17.9 | 79 | SODA | BRN | 8:44 |
| SODA | REF | 9:36 | ||||
| Sequoia | REF | 10:58 | ||||
| 2 October 2020 | 0.2 | 12.9 | 70 | Sequoia | BRN | 8:09 |
| 16 May 2021 | 0.6 | 13.7 | 76 | Sequoia | BRN | 6:50 |
| SODA | BRN | 7:31 | ||||
| SODA | REF | 11:36 | ||||
| Sequoia | REF | 12:11 |
| Vegetation Index | Equation | Reference |
|---|---|---|
| Normalized difference vegetation index (NDVI) | (ρNIR − ρRED)/(ρNIR + ρRED) | [32] |
| Green normalized difference vegetation index (GNDVI) | (ρNIR − ρGREEN)/(ρNIR + ρGREEN) | [30] |
| Simple ratio (SR) | ρNIR/ρRED | [61] |
| Green difference index (GDI) | ρNIR − ρRED + ρGREEN | [62] |
| Green red difference index (GRDI) | (ρGREEN − ρRED)/(ρGREEN + ρRED) | [62] |
| Red-edge simple ratio (SRRE) | ρNIR/ρREG | [63] |
| DATT4 | ρRED/(ρGREEN × ρREG) | [64] |
| Red-edge greenness vegetation index (REGVI) | (ρREG − ρGREEN)/(ρREG + ρGREEN) | [65] |
| Red-edge vegetation stress index (RVSI) | ((ρRED + ρNIR)/2) − ρREG | [66] |
| Dataset | Sites | Dates | Training Samples (n) | |
|---|---|---|---|---|
| Specific | BRN1 | BRN | 16 July 2020 | 30 |
| BRN2 | 2 October 2020 | 30 | ||
| BRN3 | 16 May 2021 | 30 | ||
| REF1 | REF | 16 July 2020 | 30 | |
| REF2 | 25 September 2020 | 30 | ||
| REF3 | 16 May 2021 | 30 | ||
| Date-merged | DAY1 | BRN + REF | 16 July 2020 | 60 |
| DAY2 | 25 September 2020 + 2 October 2020 | 60 | ||
| DAY3 | 16 May 2021 | 60 | ||
| Site-merged | BRNALL | BRN | 16 July 2020 + 2 October 2020 + 16 May 2021 | 90 |
| REFALL | REF | 16 July 2020 + 25 September 2020 + 16 May 2021 | 90 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
de Lima, R.S.; Li, K.-Y.; Vain, A.; Lang, M.; Bergamo, T.F.; Kokamägi, K.; Burnside, N.G.; Ward, R.D.; Sepp, K. The Potential of Optical UAS Data for Predicting Surface Soil Moisture in a Peatland across Time and Sites. Remote Sens. 2022, 14, 2334. https://doi.org/10.3390/rs14102334
de Lima RS, Li K-Y, Vain A, Lang M, Bergamo TF, Kokamägi K, Burnside NG, Ward RD, Sepp K. The Potential of Optical UAS Data for Predicting Surface Soil Moisture in a Peatland across Time and Sites. Remote Sensing. 2022; 14(10):2334. https://doi.org/10.3390/rs14102334
Chicago/Turabian Stylede Lima, Raul Sampaio, Kai-Yun Li, Ants Vain, Mait Lang, Thaisa Fernandes Bergamo, Kaupo Kokamägi, Niall G. Burnside, Raymond D. Ward, and Kalev Sepp. 2022. "The Potential of Optical UAS Data for Predicting Surface Soil Moisture in a Peatland across Time and Sites" Remote Sensing 14, no. 10: 2334. https://doi.org/10.3390/rs14102334