Four-Stage Inversion Algorithm for Forest Height Estimation Using Repeat Pass Polarimetric SAR Interferometry Data


Abstract
1. Introduction
2. Materials and Methods
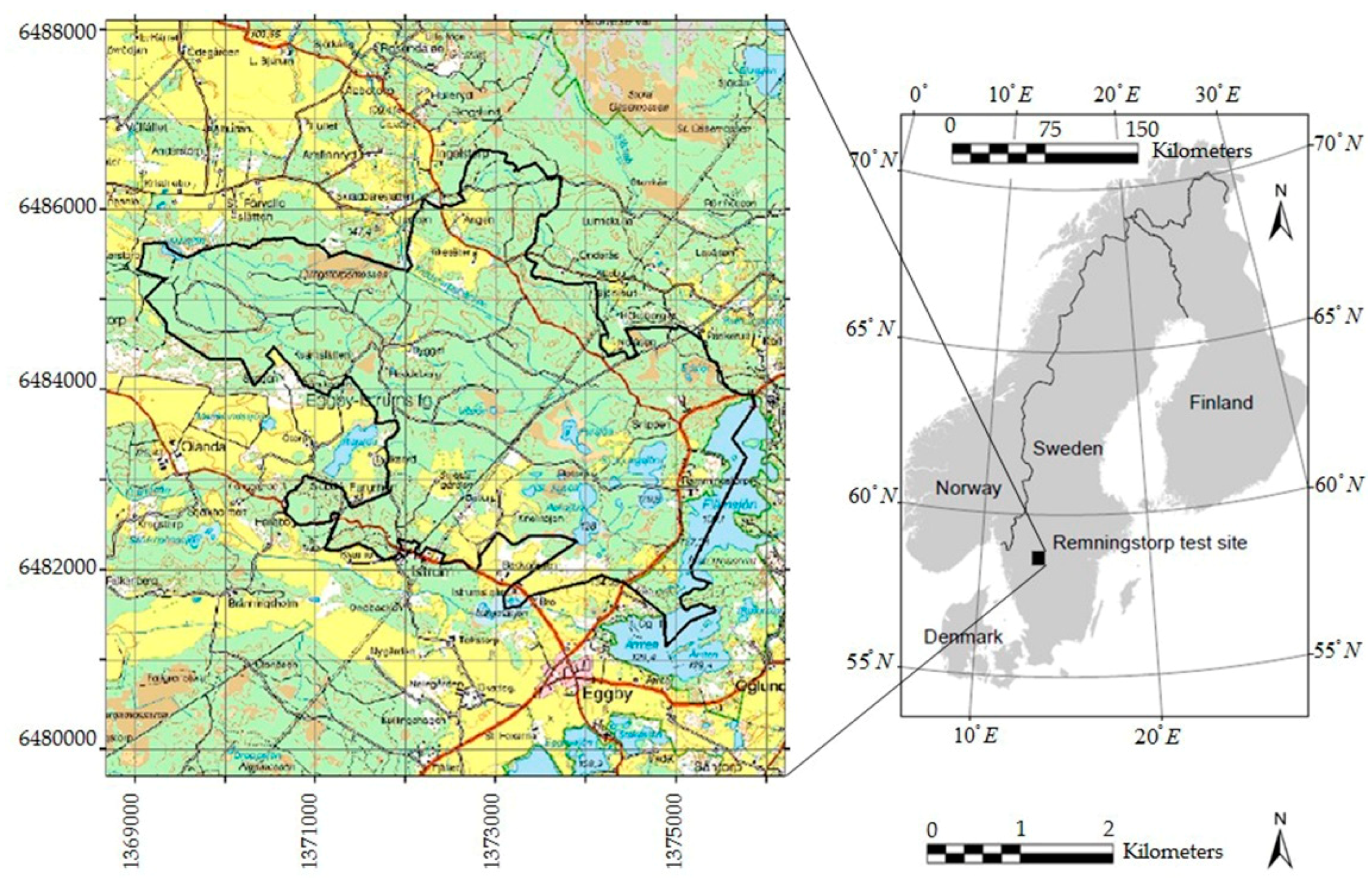
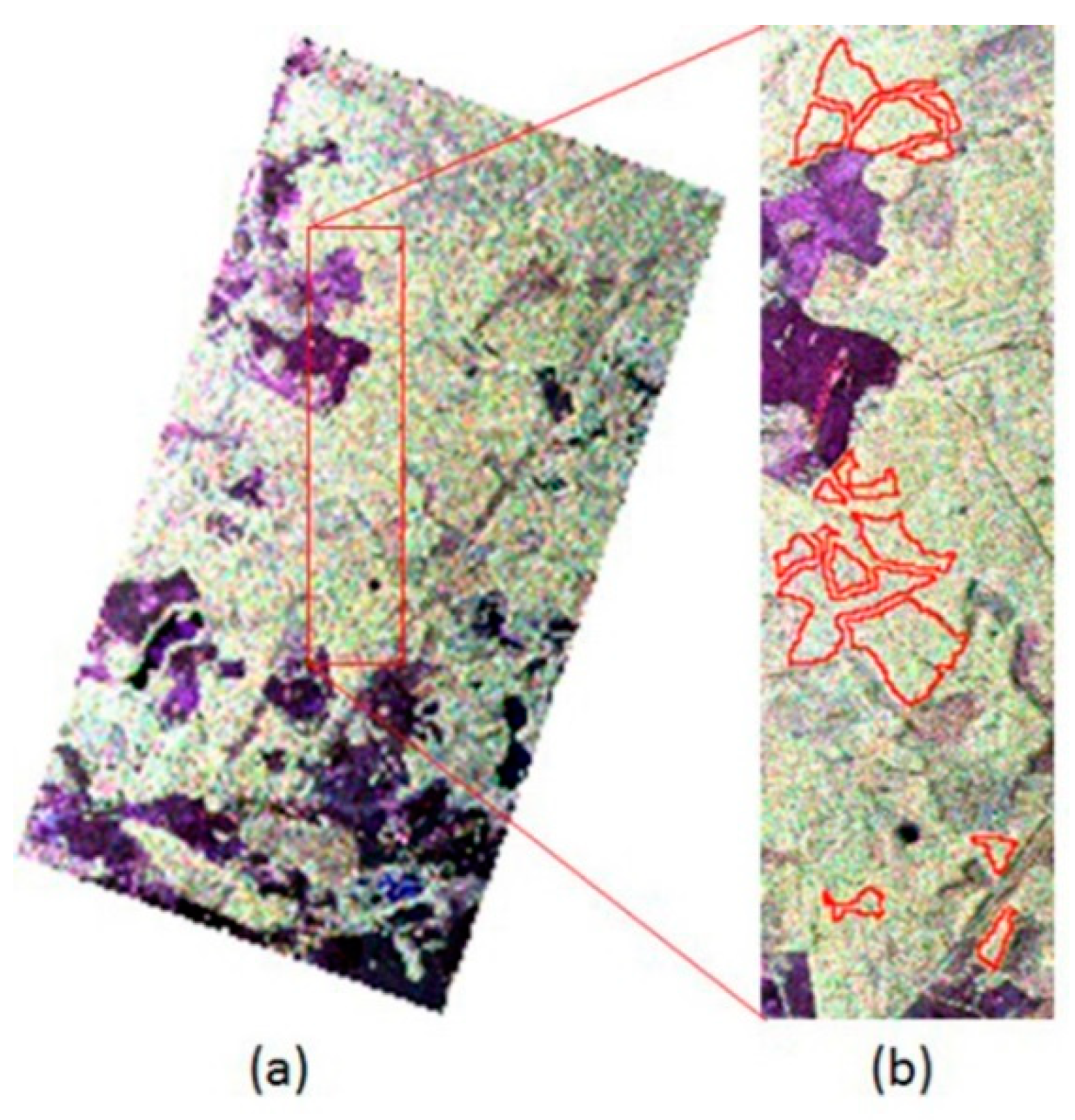
2.1. Test Site and PolInSAR Data Set Description
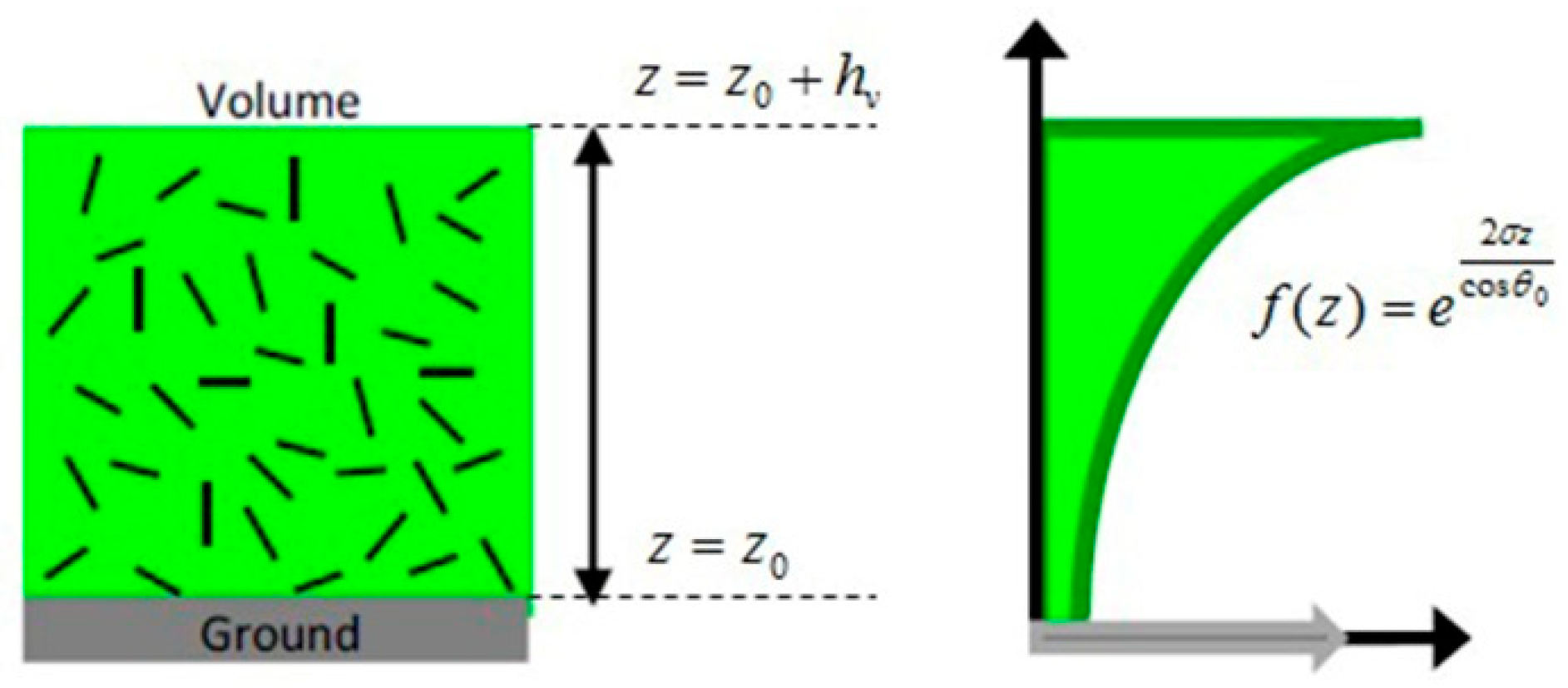
2.2. Random Volume over Ground Model
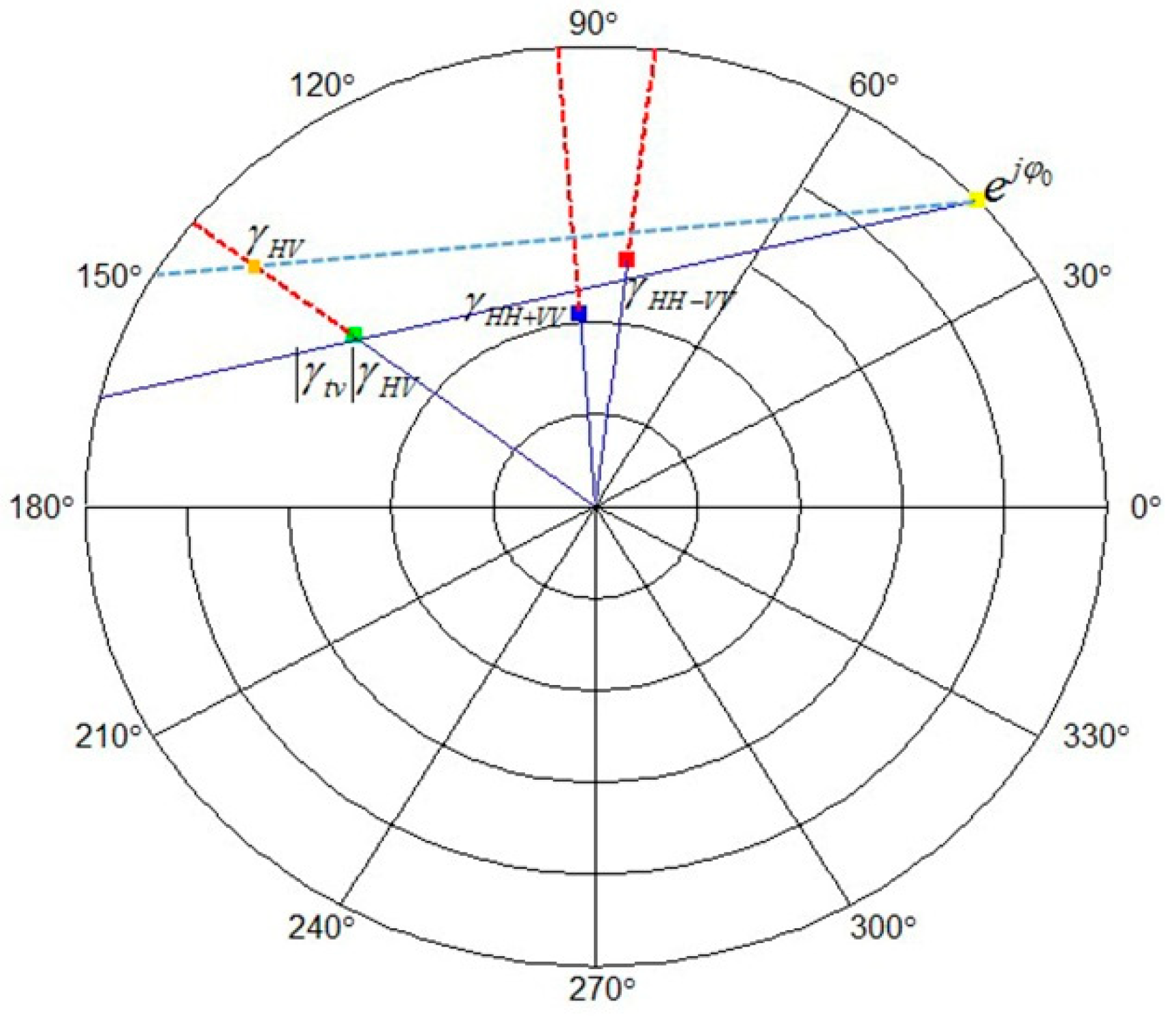
2.3. Three-Stage Inversion Method
2.4. Random Volume over Ground with Volume Temporal Decorrelation
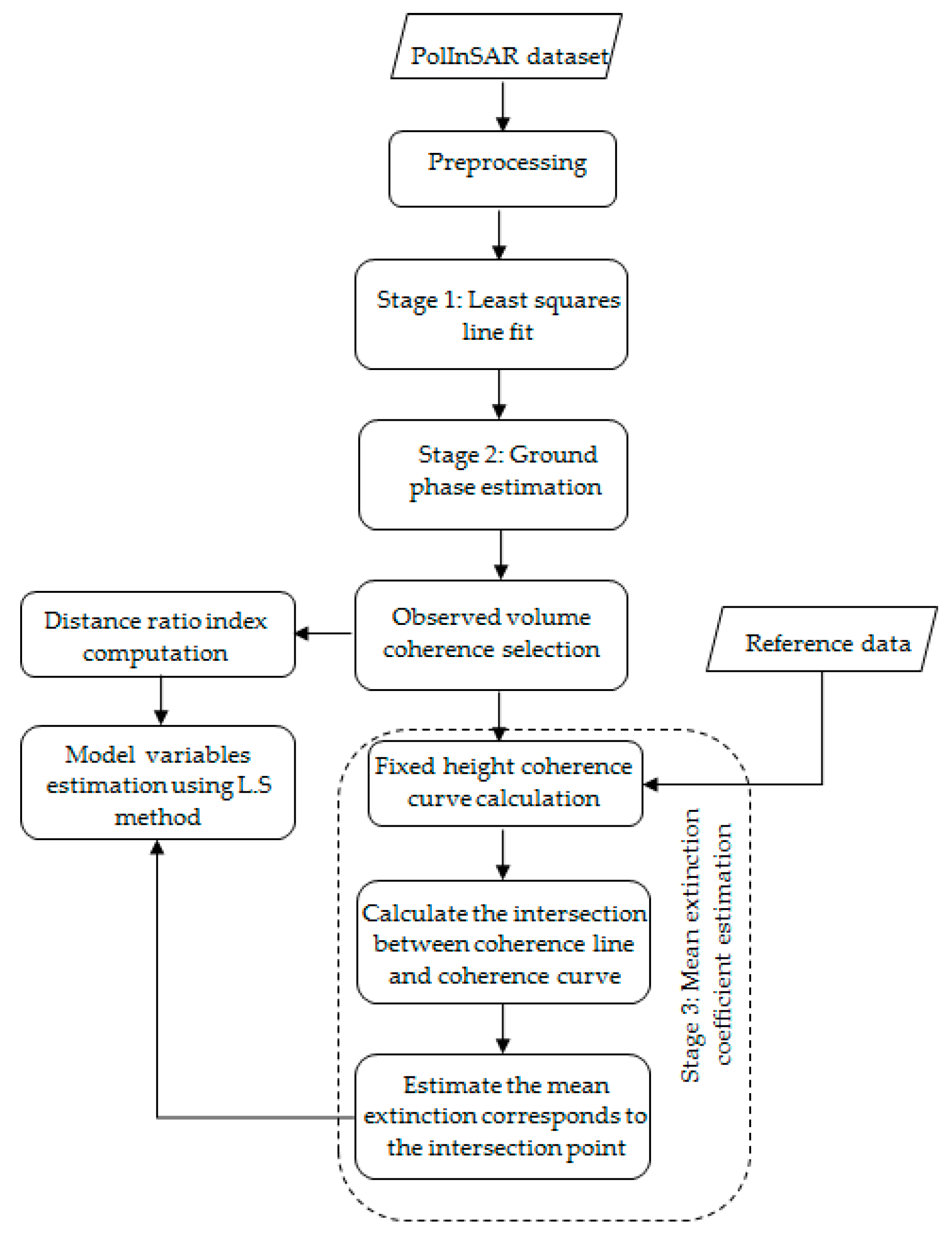
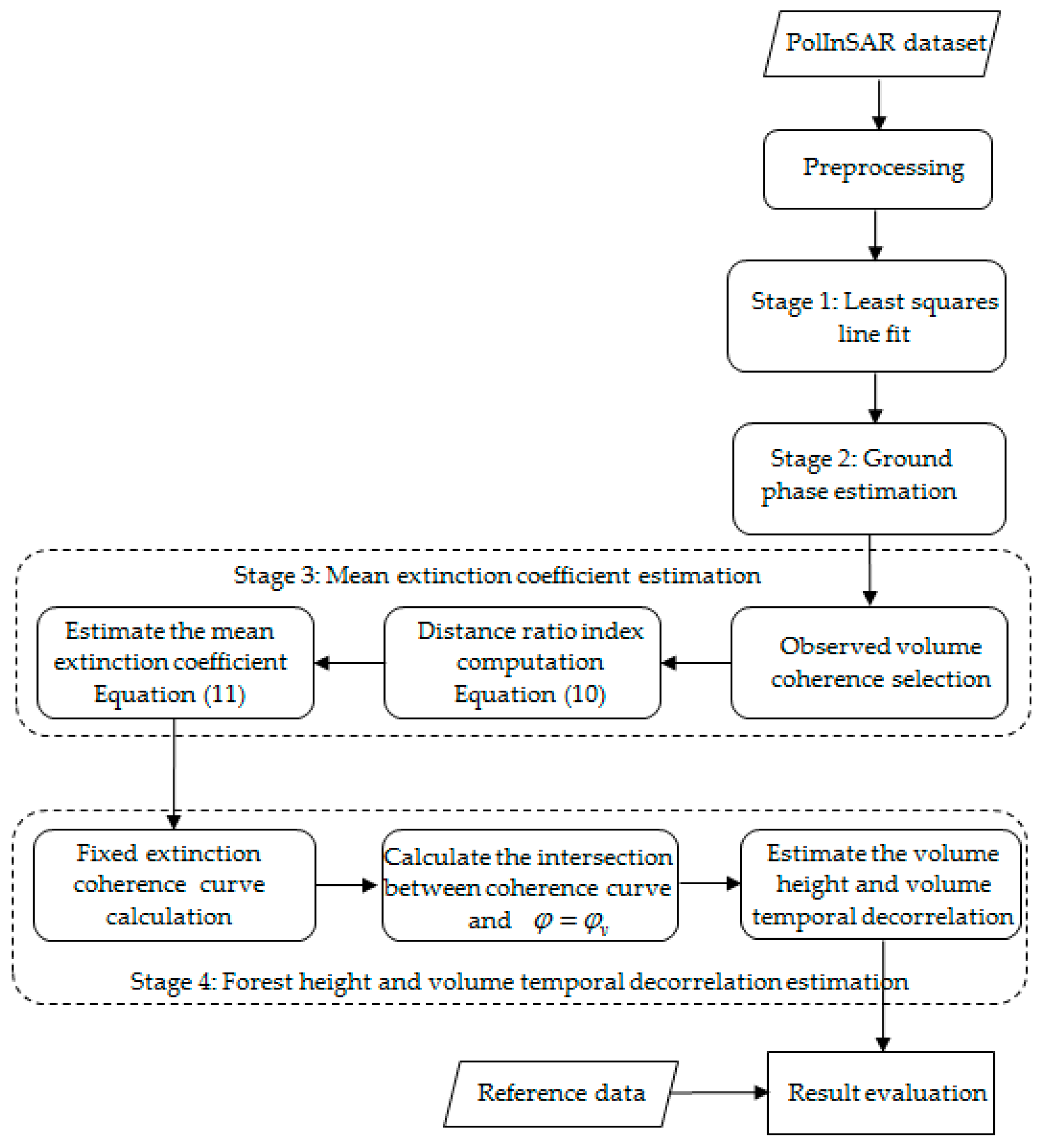
2.5. Four-Stage Inversion Method
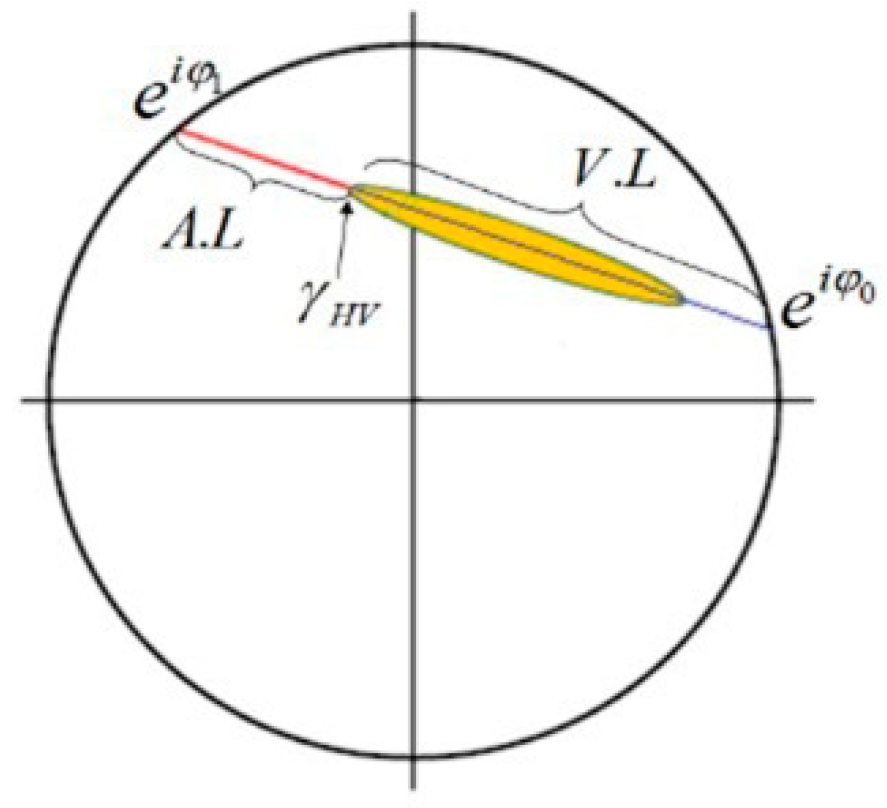
- Fit the least square line on the Pauli basis coherences and find the intersection points between the fitted line and the CUC as the ground coherence candidates.
- Choose the ground underlying phase between two candidates.
- Extract the forest height from LiDAR measurement as the reference height.
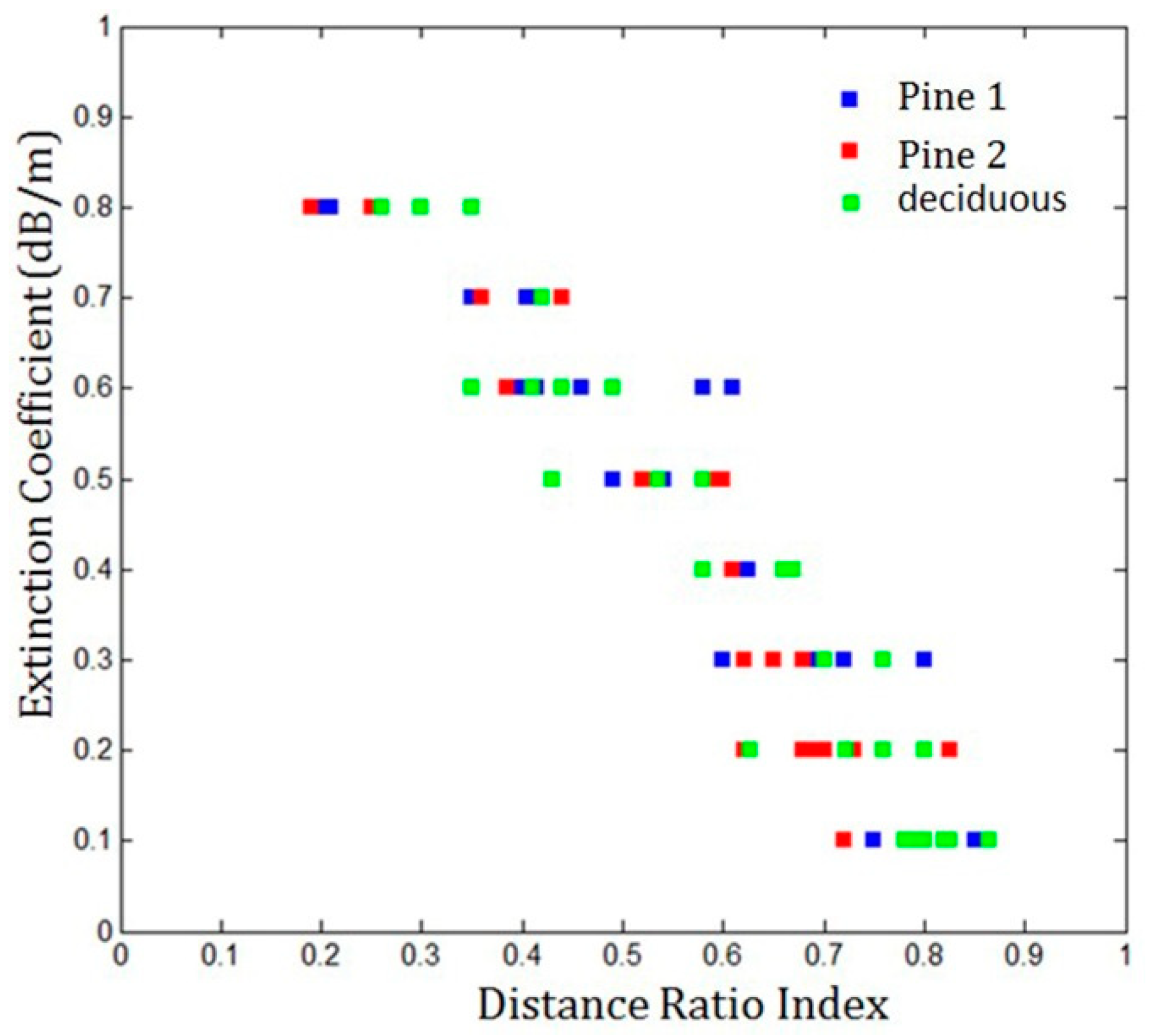
- Calculate the D.I for the selected pixels using Equation (9).
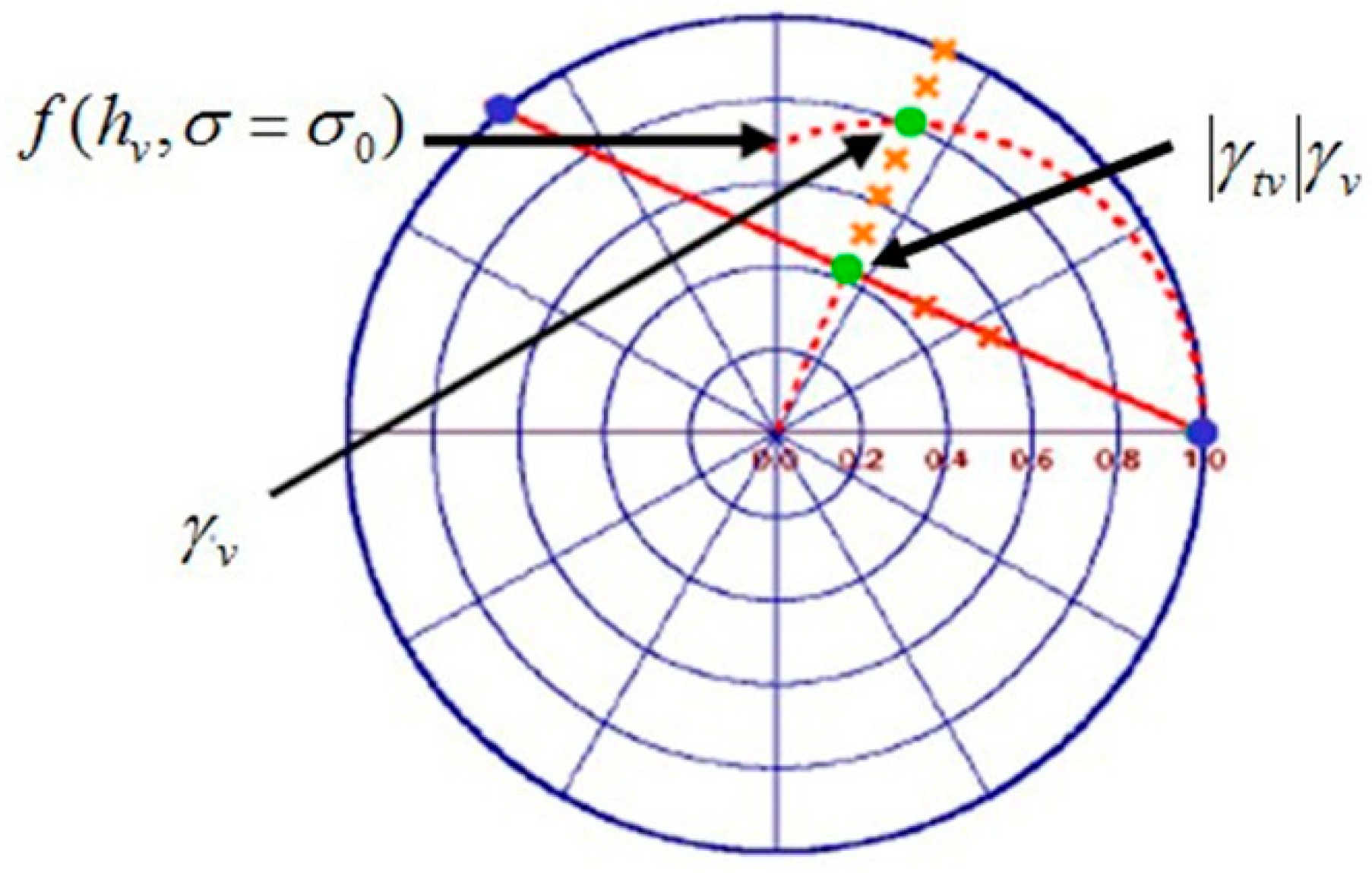
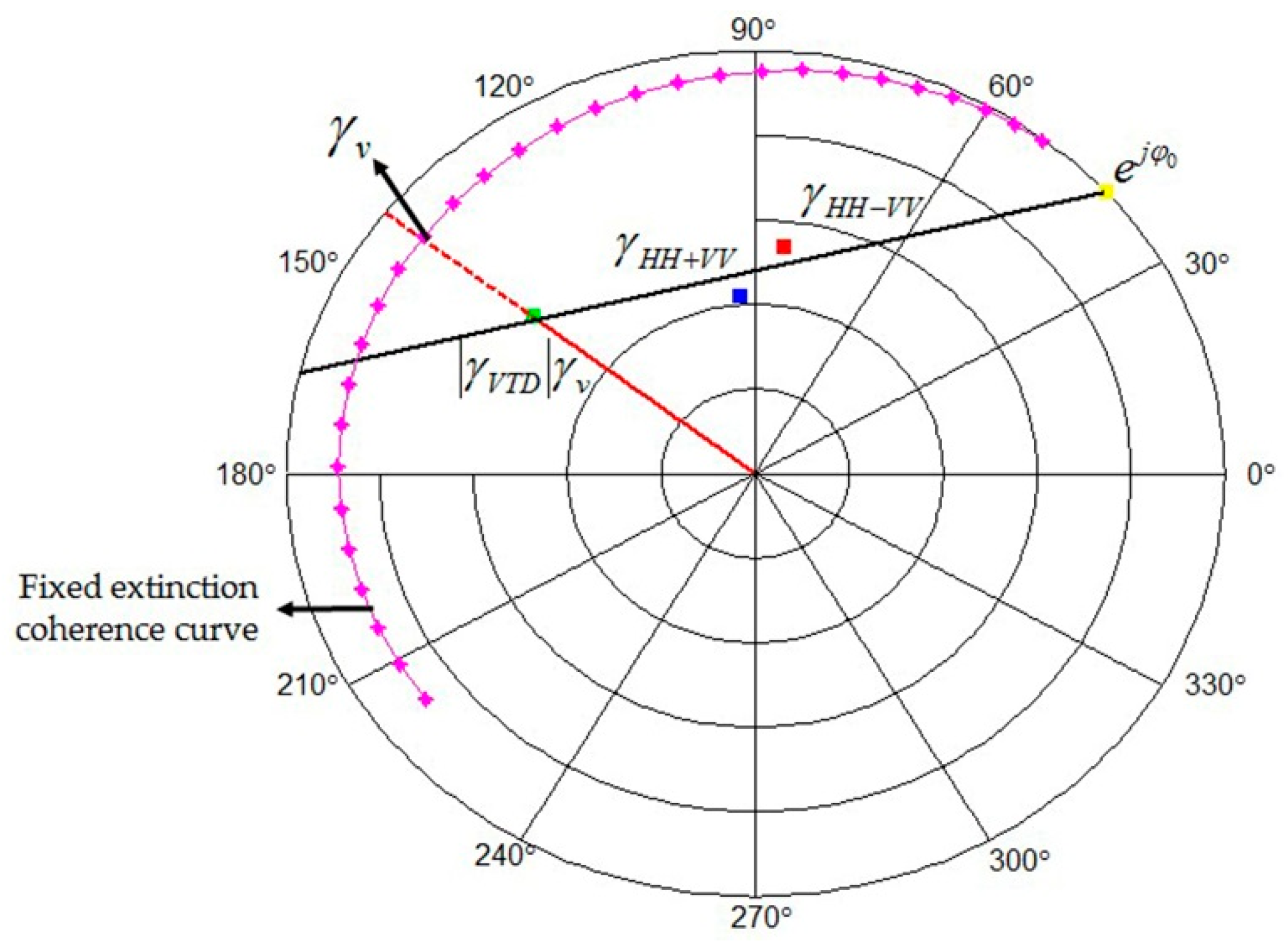
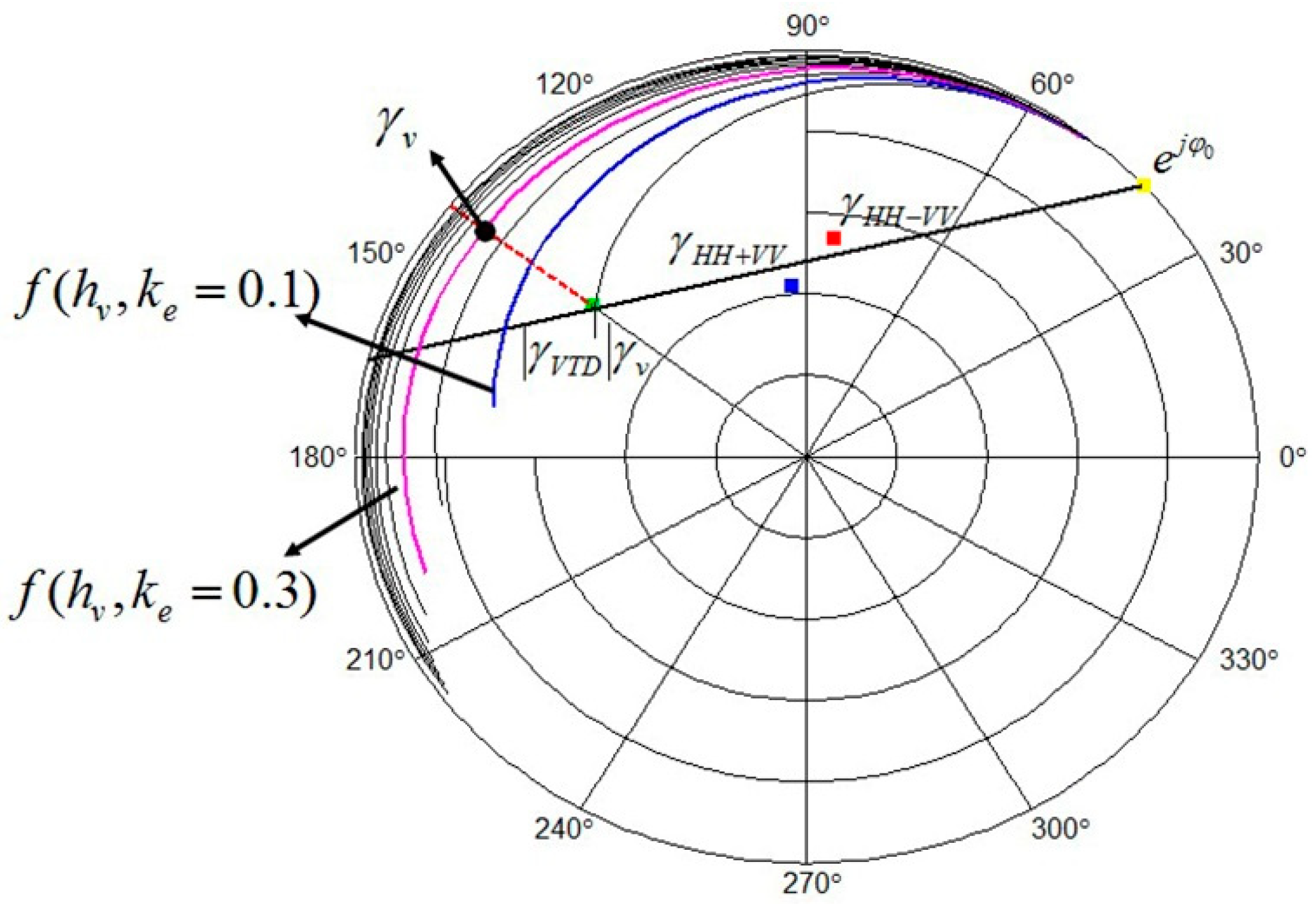
- Calculate the fixed height coherence locus for all selected pixels using Equation (4).
- Estimate the mean extinction coefficient corresponding to the intersection point between the volume coherence locus and the coherence line for all selected pixels.
- Calculate the model parameters using the least square method based on Equation (10).
- Fit the least square line on the Pauli basis coherences and find its intersections with CUC as the ground coherence candidates.
- Choose the ground coherence between two candidates according to the surface to volume backscattering ratio.
- Calculate the D.I using Equation (9) and estimate the mean extinction coefficient using Equation (10).
- Find the fixed mean extinction coherence locus using Equation (4) and estimate the volume height and the real temporal decorrelation multiplying factor from the intersection point between the volume coherence loci and .
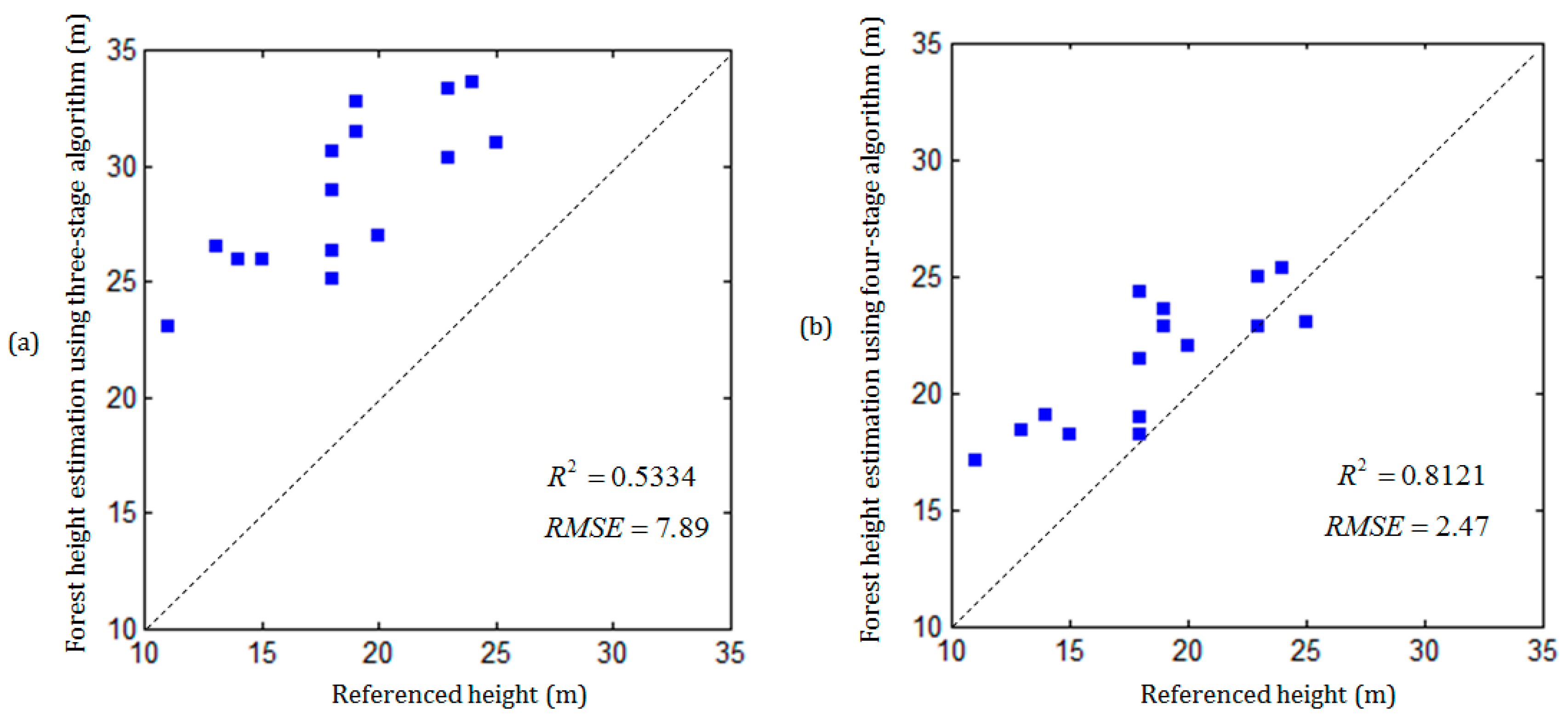
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Treuhaft, R.N.; Madsen, S.N.; Moghaddam, M.; Zyl, J.J. Vegetation characteristics and underlying topography from interferometric radar. Radio Sci. 1996, 31, 1449–1485. [Google Scholar] [CrossRef]
- Bamler, R.; Hartl, P. Synthetic aperture radar interferometry. Inverse Probl. 1998, 14, R1–R54. [Google Scholar] [CrossRef]
- Cloude, S.R.; Papathanassiou, K.P. Polarimetric SAR interferometry. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1551–1565. [Google Scholar] [CrossRef]
- Cloude, S.; Papathanassiou, K. Three-stage inversion process for polarimetric SAR interferometry. IEE Proc. Radar Sonar Navig. 2003, 150, 125–134. [Google Scholar] [CrossRef]
- Papathanassiou, K.P.; Cloude, S.R. Single-baseline polarimetric SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2352–2363. [Google Scholar] [CrossRef]
- Wenxue, F.; Huadong, G.; Xinwu, L.; Bangsen, T.; Zhongchang, S. Extended three-stage polarimetric SAR interferometry algorithm by dual-polarization data. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2792–2802. [Google Scholar] [CrossRef]
- Managhebi, T.; Maghsoudi, Y.; Valadanzoej, M.J. An improved three-stage inversion algorithm in forest height estimation using single-baseline polarimetric SAR interferometry data. IEEE Geosci. Remote Sens. Lett. 2018, 15, 887–891. [Google Scholar] [CrossRef]
- Managhebi, T.; Maghsoudi, Y.; Valadanzoej, M.J. A volume optimization method to improve the three-stage inversion algorithm for forest height estimation using PolInSAR data. IEEE Geosci. Remote Sens. Lett. 2018. accepted. [Google Scholar] [CrossRef]
- Xie, Q.; Zhu, J.; Wang, C.; Fu, H. Boreal forest height inversion using E-SAR PolInSAR data based coherence optimization methods and three-stage algorithm. In Proceedings of the Earth Observation and Remote Sensing Applications (EORSA), Changsha, China, 11–14 June 2014. [Google Scholar]
- Papathanassiou, K.; Cloude, S.R. The effect of temporal decorrelation on the inversion of forest parameters from PoI-InSAR data. In Proceedings of the International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003. [Google Scholar]
- Lavalle, M.; Hensley, S. Extraction of structural and dynamic properties of forests from polarimetric-interferometric SAR data affected by temporal decorrelation. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4752–4767. [Google Scholar] [CrossRef]
- Zhou, Y.S.; Hong, W.; Cao, F.; Wang, Y.P.; Wu, Y.R. Analysis of temporal decorrelation in dual-baseline PolInSAR vegetation parameter estimation. In Proceedings of the Geoscience and Remote Sensing Symposium, Boston, MA, USA, 7–11 July 2008. [Google Scholar]
- Neumann, M.; Ferro-Famil, L.; Reigber, A. Estimation of forest structure, ground, and canopy layer characteristics from multibaseline polarimetric interferometric SAR data. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1086–1104. [Google Scholar] [CrossRef]
- Lavalle, M.; Simard, M.; Hensley, S. A temporal decorrelation model for polarimetric radar interferometers. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2880–2888. [Google Scholar] [CrossRef]
- Li, Z.; Guo, M.; Wang, Z.; Zhao, L. Forest-height inversion using repeat-pass spaceborne polInSAR data. Sci. China Earth Sci. 2014, 57, 1314–1324. [Google Scholar] [CrossRef]
- Hajnsek, I.; Scheiber, R.; Lee, S.; Ulander, L.; Gustavsson, A.; Tebaldini, S.; Monti-Guarnieri, A. BIOSAR 2007: Technical Assistance for the Development of Airborne SAR and Geophysical Measurements during the BioSAR 2007 Experiment; ESA-ESTEC: Noordwijk, The Netherlands, 2008. [Google Scholar]
- Richards, J.A. Remote Sensing with Imaging Radar; Springer: Berlin, Germany, 2009; Volume 1, ISBN 978-3-642-02019-3. [Google Scholar]
- Lee, S.-K. Forest Parameter Estimation Using Polarimetric SAR Interferometry Techniques at Low Frequencies. Ph.D. Thesis, ETH Zurich, Zurich, Switzerland, 2012. [Google Scholar]
- Fu, H.; Wang, C.; Zhu, J.; Xie, Q.; Zhao, R. Inversion of vegetation height from PolInSAR using complex least squares adjustment method. Sci. China Earth Sci. 2015, 58, 1018–1031. [Google Scholar] [CrossRef]
- Xie, Q.; Zhu, J.; Wang, C.; Fu, H.; Lopez-Sanchez, J.M.; Ballester-Berman, J.D. A Modified Dual-Baseline PolInSAR Method for Forest Height Estimation. Remote Sens. 2017, 9, 819. [Google Scholar] [CrossRef]
- Cui, Y.; Yamaguchi, Y.; Yamada, H.; Park, S.-E. PolInSAR coherence region modeling and inversion: The best normal matrix approximation solution. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1048–1060. [Google Scholar] [CrossRef]
- Freeman, A.; Durden, S.L. A three-component scattering model for polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 1998, 36, 963–973. [Google Scholar] [CrossRef]
- Lee, S.-k.; Kugler, F.; Hajnsek, I.; Papathanassiou, K. The impact of temporal decorrelation over forest terrain in polarimetric SAR interferometry. In Proceedings of the International Workshop on Applications of Polarimetry and Polarimetric Interferometry (Pol-InSAR), Frascati, Italy, 26–30 January 2009. [Google Scholar]
- Cloude, S. Polarisation: Applications in Remote Sensing, 1st ed.; Oxford University Press: New York, NY, USA, 2010; ISBN 978-0-19-956973-1. [Google Scholar]
- Garestier, F.; le Toan, T. Forest modeling for height inversion using single-baseline InSAR/Pol-InSAR data. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1528–1539. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Distance Value in CUC between γv and γHV | Mean Extinction Coefficient | Estimated Forest Height |
|---|---|---|
| 0.0062 | 0 | 30 |
| 0.1706 | 0.1 | 26 |
| 0.2574 | 0.2 | 23 |
| 0.3069 | 0.3 | 21 |
| 0.3371 | 0.4 | 21 |
| 0.3578 | 0.5 | 21 |
| 0.3677 | 0.6 | 22 |
| 0.3763 | 0.7 | 22 |
| 0.3835 | 0.8 | 22 |
| 0.3861 | 0.9 | 23 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Managhebi, T.; Maghsoudi, Y.; Valadan Zoej, M.J. Four-Stage Inversion Algorithm for Forest Height Estimation Using Repeat Pass Polarimetric SAR Interferometry Data. Remote Sens. 2018, 10, 1174. https://doi.org/10.3390/rs10081174
Managhebi T, Maghsoudi Y, Valadan Zoej MJ. Four-Stage Inversion Algorithm for Forest Height Estimation Using Repeat Pass Polarimetric SAR Interferometry Data. Remote Sensing. 2018; 10(8):1174. https://doi.org/10.3390/rs10081174
Chicago/Turabian StyleManaghebi, Tayebe, Yasser Maghsoudi, and Mohammad Javad Valadan Zoej. 2018. "Four-Stage Inversion Algorithm for Forest Height Estimation Using Repeat Pass Polarimetric SAR Interferometry Data" Remote Sensing 10, no. 8: 1174. https://doi.org/10.3390/rs10081174
APA StyleManaghebi, T., Maghsoudi, Y., & Valadan Zoej, M. J. (2018). Four-Stage Inversion Algorithm for Forest Height Estimation Using Repeat Pass Polarimetric SAR Interferometry Data. Remote Sensing, 10(8), 1174. https://doi.org/10.3390/rs10081174