1. Introduction
Cloud-to-ground (CG) strokes are a natural hazard having a large impact on human activities. They involve, in fact, very strong electrical currents (up to dozen of kAmperes), and, for this reason, they constitute a serious threat for human safety as well, as they may adversely affect industrial productions, transport activities (especially the air traffic routing) and power lines [
1,
2].
The information about the spatial and temporal occurrence of CG strokes is typically provided by in situ ground-based electromagnetic stroke detection systems, which perform direct measurements through extremely-low (ELF) to very-low (VLF) frequency and very-high (VHF) to extremely-high (EHF) frequency sensors. According to [
3,
4], the ground-based lightning network systems are able to detect CG stroke discharges with a spatial resolution as high as up to 100 m and with a detection efficiency up to 95%, although these performances depend on the network density and the type of sensors.
The real-time surveillance of stroke occurrence can also rely on weather radar measurements, which are able to track and characterize the three-dimensional (3D) structure of rain cells, thus allowing for identifying the developing cycle of cells and the areas much prone to stroke activity, even before the occurrence of the first lightning event (e.g., [
5]). Therefore, the set-up of a reliable, affordable, and accessible radar-based stroke detection system, complementary to traditional ground-based stroke networks, can be very useful for risk prevention and for safety of human life, goods and services. In addition, a stand-alone radar-based stroke detection system could cover those areas where data from lightning networks are not freely accessible or where their detection efficiency levels are not constant over large domains, due to the irregular distribution of lightning sensors.
This work is aimed at proposing a new algorithm for the radar-based detection of stroke activity based on a multi-variable approach.
To explain our approach, it is useful to briefly summarize the atmosphere electrification mechanisms and the radar-based approaches so far proposed in the state of the art literature. Electrification mechanisms in thunderstorms are explained following the widely accepted Non-Inductive Charging (NIC) theory, whose evidences have been supported by many laboratory studies, as well as by field campaigns (e.g., [
6,
7]). According to NIC theory, the most efficient conditions for charge separation within the updraft of a thunderstorm occur during the collision between graupel and ice crystals [
8]. This mechanism takes place in the mixed-phase cloud region, which consists of a proper mix of supercooled liquid droplets, ice crystals, and water vapor [
9].
Dual polarization radars have demonstrated, to some extent, to be able to segment a precipitating cloud, allowing for the separation of the mixed-phase regimes from the rest (e.g., [
10,
11]). In this respect, some previous works have highlighted a correlation between dual polarization radar variables and microphysical processes of stroke initialization [
12,
13,
14,
15,
16,
17,
18]. However, most of the local weather services cannot afford dual polarization technology, and, on top of this, the increasing diffusion of small networks of single polarization X band radars for urban and small catchment monitoring is a demonstration of a constant interest toward these systems and the related applications [
19].
The measurements that are provided by single polarization weather radars, although with some well-known limitations, can still provide some exploitable information for the hydrometeor detection in the mixed-phase region of a thunderstorm. In this respect, several studies [
20,
21,
22,
23,
24] have found links between the presence of graupel at different environmental levels and the occurrence of a strong reflectivity core. These relationships have been synthetized into a radar-based stroke forecast criterion, named Isothermal Reflectivity Threshold (IRT), which is based on the occurrence of a determined reflectivity core (
Z), usually 30 dBZ or 40 dBZ, at a certain environmental height typically represented by the level of −10 °C, −15 °C or −20 °C isotherms (
T). The performance of the IRT method has been extensively evaluated [
25,
26,
27,
28,
29,
30,
31,
32,
33,
34,
35], especially in the USA, after the introduction of the WSR-88D radar network. As a general result, these studies show that CG strokes occur within a time ranging from 4 to 45 min after the presence of certain reflectivity cores (ranging from 10 dBZ to 40 dBZ) at isothermal heights varying between 0 °C and −20 °C.
The existing literature has also proposed also other radar-derived parameters for the stroke forecast, such as the Vertically Integrated Liquid (
VIL) and the Vertically Integrated Ice (
VII). The
VIL product, introduced in [
36], is an estimate of the liquid water mass content (excluding ice) along the convective column. Weather forecasters have traditionally used
VIL to discriminate between weak and severe storms; the use of
VIL for stroke prediction has been proposed for the first time in [
37], for a storm that occurred in Oklahoma in June 1993. Another attempt to use
VIL for stroke forecast has been performed in [
38], for a dataset including 120 cells. The results of these two studies highlighted a low correlation degree between
VIL and CG stroke occurrence. The
VII product has been proposed in [
14] to improve the low correlation with respect to the stroke activity that was found using
VIL alone.
VII provides a quantitative estimation of the amount of ice between the −10 °C and −40 °C isothermal levels.
VII tool has been tested for stroke forecast purposes in [
30,
31]. Other approaches discussed in previous literature are the Differential Isothermal Height (DIH) and the “Larsen Area” (LA). The former has been defined in [
39] as the difference between the height achieved by a given reflectivity core and a certain isothermal level. This difference can be considered as a proxy for the electric field development and the subsequent stroke discharge. The LA, in its original definition, introduced in [
21], corresponds to a nearly horizontal area occupied by reflectivity echoes greater than 43 dBZ above 7 km height. In [
5], some simple storm attributes, such as the maximum reflectivity value observed in the storm cell area, the maximum height reached by a determined reflectivity core within a cell and the storm area, have been evaluated as predictors of CG stroke occurrence. In [
18], the relationship between ice water content of graupel (IWC
g) and CG stroke activity has been investigated for eleven convective events. Finally, some radar-derived variables, such as the maximum reflectivity value, the reflectivity observed at the level of −10 °C isotherm, and the
VIL product, have been merged with attributes from ground-based lightning network (i.e., the lightning density and the ideal lightning density) in a multi-sensors algorithm for CG stroke prediction [
40]. Such algorithm has been included in the Multi-Radar Multi-Sensor (MRMS) system, developed at the National Severe Storms Laboratory and the University of Okhlahoma [
41].
A summary of the results that were achieved by previous works focused on radar-based stroke prediction is summarized in
Table 1, in terms of some standard statistical scores, such as the Probability of Detection (POD), the False Alarm Rate (FAR), and the Critical Success Index (CSI). Most of these studies use single-polarization reflectivity measurements collected by S-band or C-band weather radars and evaluate, from a quantitative perspective, only the IRT and VII methods. To our knowledge, dual polarization capability has been used for stroke detection applications only in few studies [
5,
18,
34,
35]. Such works have explored the usefulness of some common dual polarization moments (e.g., differential reflectivity, cross-correlation coefficient, specific differential phase, as well as traditional horizontal reflectivity measure), in stroke initiation forecasting. Moreover, the four variables just mentioned have been used in [
5,
18,
32] as input to fuzzy logic systems, such as the Hydrometeor Classification Algorithm (HCA) and the Particle IDentification (PID), designed to detect the first occurrence of the hydrometeors that usually participate in electrification processes (e.g., graupel, hail and supercooled raindrops). From
Table 1, it is worth highlighting that the number of rain cells analyzed in previous works is extremely variable (from 20 to 123,360), suggesting that the statistical robustness of the dataset used, especially in terms of the representativeness of the thunderstorm climatology, needs to be taken into account when quantitatively comparing results from different studies. Moreover, it is important specifying that
Table 1 uniquely lists the radar-only self-consistent approaches, i.e., it does not include the multi-sensors algorithms, which cannot be directly compared to the algorithm proposed in this study.
The goal of this work is to develop a multi-parametric radar-based algorithm for the detection of CG stroke rate (i.e., the number of strokes per minute, hereafter indicated as
SRCG) associated to convective cells, using single-polarization X-band weather radar measurements. The proposed methodology has been trained and tested in the pilot study area of Naples metropolitan environment, located in southern Italy, using a dataset including 1575 radar volumes, stroke observations provided by LIghtning NETwork (LINET) [
42], and in-situ meteorological data.
The main novelties and strengths of this study can be synthetized in the following key-points:
for the first time, a multi-parameter approach for
SRCG detection, based on different radar-based proxy parameters, has been developed (all previous approaches are based on single parameter, as shown in
Table 1);
the proposed algorithm relies on the reflectivity measurements of a low-cost and portable single-polarization X-band weather radar. The latter, as demonstrated in [
43,
44], may exhibit acceptable performance at short ranges (i.e., below 80 km) when compared to conventional systems (the S and C-band systems), but with the advantage of more affordable costs in terms of infrastructure, power requirements and maintenance. In this respect, our work fits a research path that in recent years has been devoted to exploit the potential usefulness of low-cost X-band radars in weather surveillance, especially at urban scale (e.g., [
43,
45,
46,
47,
48]);
the radar-based predictors evaluated in this study include the DIH and LA methods, that have been both scarcely tested in previous works;
the performance of the stroke detection criteria is assessed through a complete metric that includes some statistical scores scarcely or never used in similar studies, providing a robust and fair evaluation of algorithm skills; and,
the dataset used in this study has a reasonable size, including a total of 5754 convective cells, it is well populated, involving a great variety of meteorological scenarios, and it is fairly balanced (i.e., both stroke and non-stroke producing rain cells are reasonably represented in the dataset).
The paper is organized, as follows.
Section 2 presents both radar and stroke measurements, giving some information also about the target area.
Section 3 provides an overview of the investigated radar-based stroke predicting variables. The algorithm used for the identification of convective cells and the stroke detection methodologies are described in
Section 4. The criteria used to select the optimal radar-based stroke predicting variables and the training of the algorithm designed for the clustering detection of stroke activity are presented in
Section 5. The results are discussed in
Section 6, in terms of score indexes. Finally, the conclusions are drawn in
Section 7.
2. Experimental Measurements
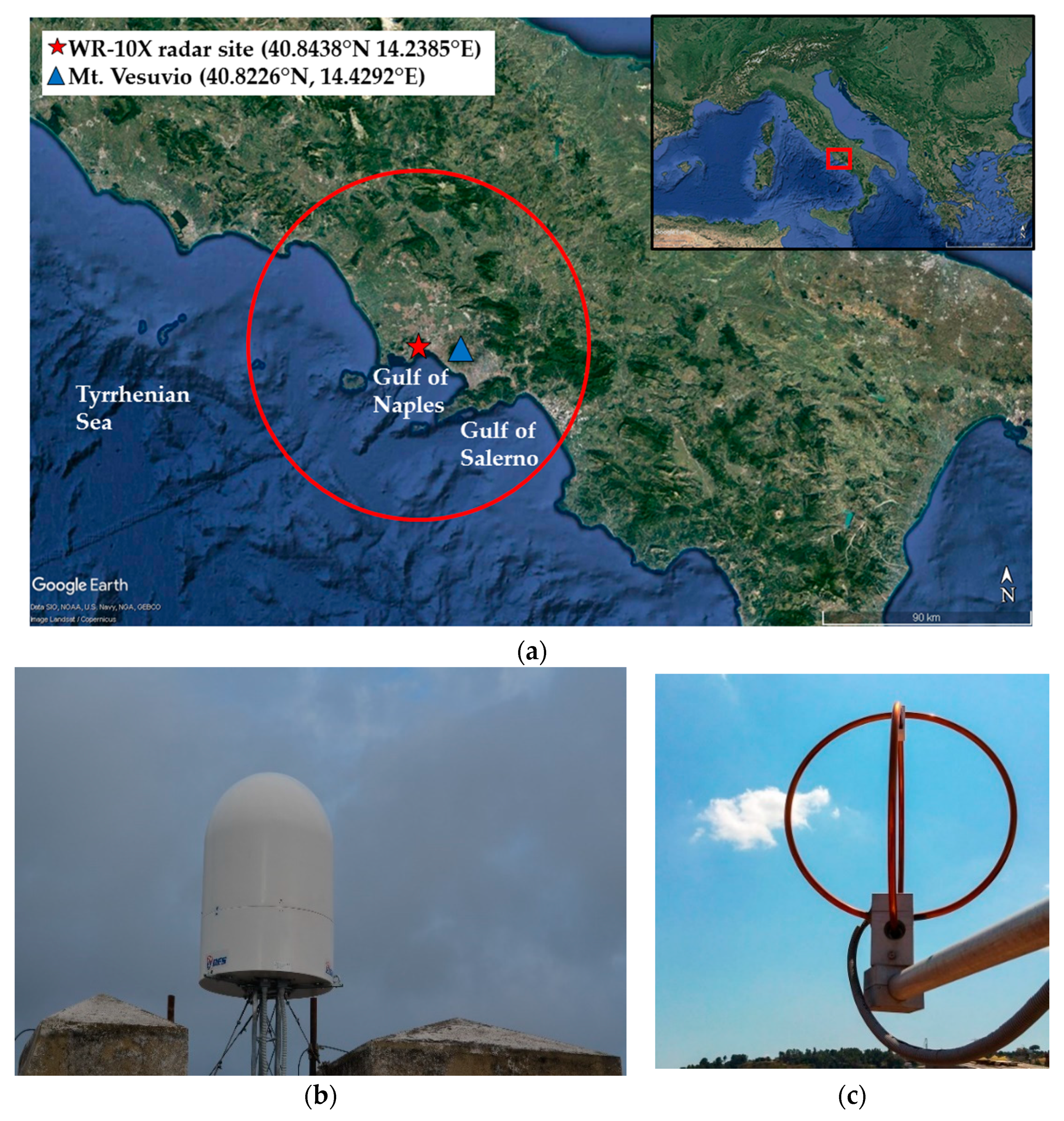
The area investigated in this study, shown in
Figure 1a, is the one covered by the X-band weather radar system operating in Naples urban area, in southern Italy. The target region encompasses the western side of Campania region, extending from 40.1893°N to 41.4975°N and from 13.4005°E to 15.0939°E. Such an area is characterized by heterogeneous geographical features: it includes, in fact, the western and the meridional side of Campania Apennines reliefs (Matese, Taburno, and Partenio), which have altitudes ranging between 1400 m and 2000 m, the plain of Caserta, the coastal sector of Naples and Caserta Provinces and the Gulf of Salerno. As highlighted in [
44,
45], thunderstorm development in the study area might be triggered either by synoptic and small-scale mechanisms or by local interactions between them.
The dataset used to train and test the proposed methodology includes X-band reflectivity volumes, ground-based stroke measurements and in situ-meteorological data collected into 48 different thunderstorm days, occurred between April 2012 and March 2016. These case studies have been carefully selected, in order to take into account periods of strong lightning activity as well as convective events characterized by low atmospheric electrification. Moreover, the selection criteria have been also defined according to some issues that are related to the radar scanning geometry, as better described in the next paragraph.
2.1. X Band Radar Measurements
The radar system that is involved in this study, named WR-10X, is a single-polarization X-band weather radar, manufactured by ELDES srl. The main strengths of WR-10X lie in its reduced size (90–130 cm
2) and weight (about 100 kg), as well as in the low electric power consumption (about 300 W), which simplifies the installation facilities, especially in urban contexts. A prototype of this radar system has been installed, at the end of 2011, in Naples metropolitan area (
Figure 1b) by the Campania Center for Marine and Atmospheric Monitoring and Modelling (CCMMMA) of the University of Naples “Parthenope”. The WR-10X operating in Naples urban area provides a complete data volume every 10 min. Such temporal sampling, which is used by most weather agencies in Europe, is a compromise among technical reasons (antenna rotation velocity), scan strategy (number of antenna elevations included in the volume scan), and opportunity to observe rapidly evolving events and data processing. More specifically, the reflectivity data are collected in the first two minutes of a WR-10X scan which include six different elevation angles (ranging from 1.0° to 10.0° with respect to horizon), whereas the remaining eight minutes are dedicated to the data processing and to the product generation. Other technical features of WR-10X weather radar are listed in
Table 2.
According to the Volume Coverage Pattern (VCP) that is used by WR-10X in operational mode, the thunderstorm events that partially extended over areas closer than 15 km (i.e., over the cone of silence) have been discarded, since the radar may be not able to properly observe the highest portion of convective cells. Moreover, other potential biases in the characterization of thunderstorm vertical structure may arise due to the following issues: (i) the presence of the Volcano Vesuvio (40.8226°N, 14.4292°E), which can totally block the propagation at the three lowest antenna elevation angles (namely at 1°, 2°, and 3°) of WR-10X beam in the southeastern portion of the study area; (ii) the relatively broad beam width (<3° at 3 dB), which may adversely affect the sampling of convective clouds at great distances from the radar site; (iii) residual path attenuation, that in some cases can fade the radar signal compromising quantitative retrievals; and, (iv) radar calibration.
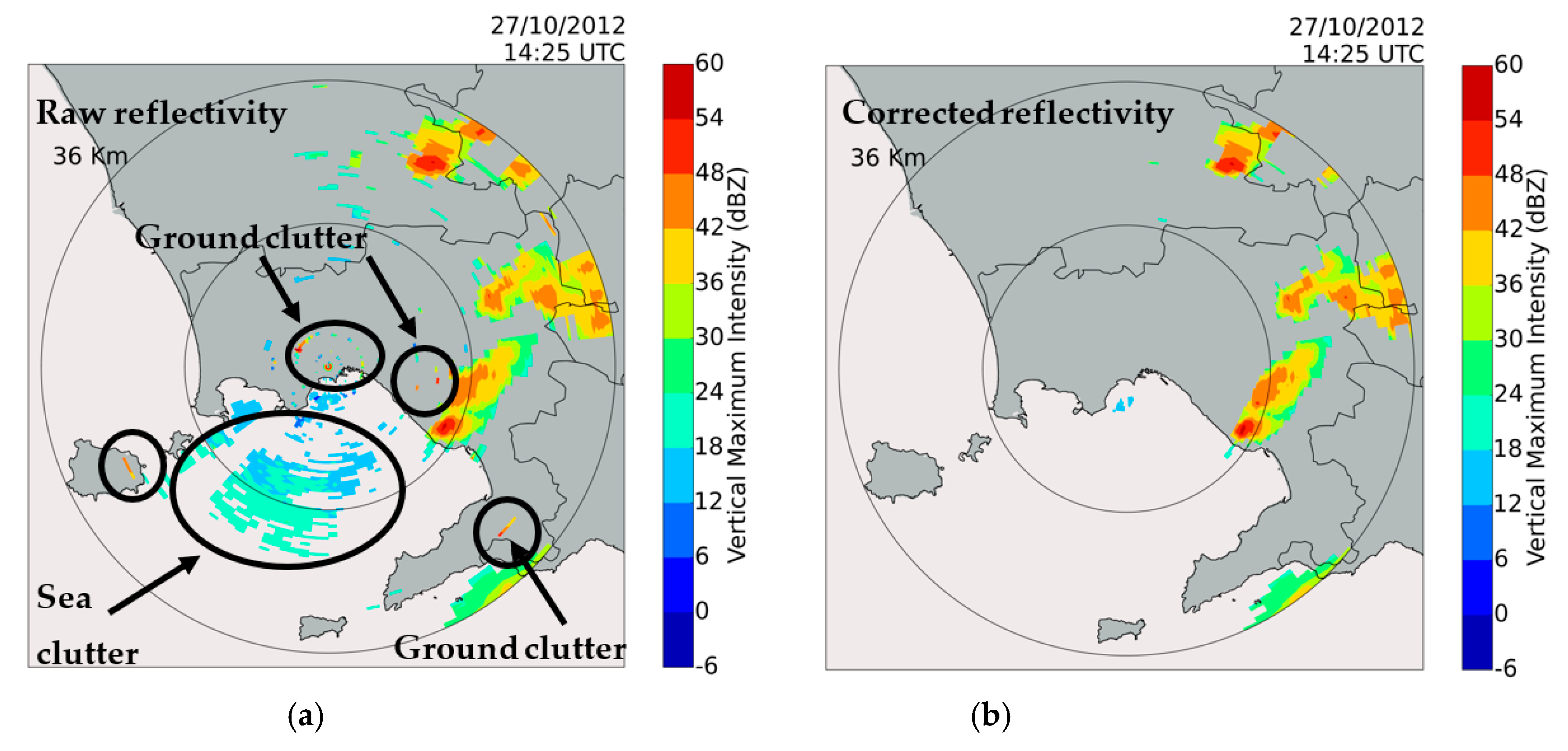
For the period analyzed in this study, 1575 reflectivity radar volumes have been collected and further processed through a quality control chain. The latter is focused to compensate for the following systematic errors: ground and sea clutter, beam attenuation along the path, and beam blocking by surrounding topography. Some details on the strategies and methodologies designed to overcome these issues are provided below.
Ground and sea clutter suppression: the statistical declutter filter of WR-10X relies on the different sample statistical distribution between meteorological and non-meteorological echoes. This filtering procedure has been improved through an in-house statistical filter, in order to suppress the noise caused by ground clutter. Such filter is based on entropy and texture calculations, as well as on median filtering [
50]. To eliminate sea clutter, an approach that is based on vertical reflectivity profile analysis has been considered [
51]. Such analysis involves the difference between the reflectivity measurements at 1° antenna elevation angle and 2° antenna elevation angle; the sea clutter is diagnosed when such difference is above a fixed threshold, determined through the analysis of a large number of case studies. An example of ground clutter and sea clutter suppression for a convective event occurred on 27 October 2012 is provided in
Figure 2. The filter for ground clutter removal proves to be very efficient, although it tends to eliminate a few meteorological echoes.
Beam blocking by surrounding topography: in order to mitigate such an issue, the correction scheme described in [
52], based on the percentage of beam cross section shielded and on a simple interception function between the radar beam cross section and the topography, has been applied.
Attenuation along the path: such a challenge has the major impact on the quality of X-band reflectivity measurements (e.g., [
53,
54]) and may be optimally compensated only through approaches based on dual-polarization features [
55]. In our case, the attenuation has been mitigated by means of a classical iterative procedure, tested for heavy and moderate rainfall events, in which attenuation may be relevant [
50]. In order to evaluate the impact of such issue and other impairments, a sensitivity analysis has been performed and is shown in
Section 6.
2.2. Stroke Measurements
Stroke data from the ground-based low-frequency (VLF/LF) LINET are used to analyze the evolution of the storms. LINET system covers a wide area from approximately 30°N 10°W to 65°N 35°E and allows for discriminating between CG and intra-cloud (IC) strokes, as well as their polarity [
42,
56,
57]. An example of LINET stroke detection sensor, retrieved from [
49], is shown in
Figure 1c.
LINET is able to register weak stroke events with currents well below 5 kA within the central part of the network, whereby IC events dominate. The 3D-discrimination procedure uses a time-of-arrival method to separate CG from IC (with a position accuracy of 150 m) and its accuracy is higher when the sensor baseline does not exceed ~200 km. More specifically, CG strokes can be discriminated from IC strokes in a more reliable way for distances not exceeding about 120 km from the closest sensor. Moreover, LINET allows for the estimation of IC emission height, although at least four sensors are needed for a reliable determination of the IC stroke height [
42,
57]. Finally, the network has an optimized location accuracy of strokes, which reaches an average value of about 150 m, whereby false locations (‘outliers’) rarely occur.
The information provided by LINET has been exploited in terms of the position, expressed in geographical coordinates, and the number of IC and CG strokes occurred within the radar domain in a time interval Δt = 2 min from the beginning of each WR-10X volume acquisition time. In this way, the reflectivity data, which are collected in the first two-minute time interval for each radar acquisition, are co-located in time with the LINET data.
2.3. In-Situ Meteorological Data
The conventional in-situ meteorological data have been included in the experimental measurement dataset in order to estimate, for each of the examined thunderstorm days, the isotherm levels, HT, for T = 0 °C, T = −10 °C, and T = −20 °C.
The near-surface temperature has been obtained from three Automatic Weather Stations (AWS), located in Naples, and belonging to the CCMMMA monitoring network. These stations have been selected according to the high percentage of data availability and to their representativeness of the meteorological conditions that affect the study area. For each thunderstorm day, an estimate of
HT has been performed extrapolating the temperature from the AWS measured at the time closest to the WR-10X acquisition time, assuming a standard temperature lapse rate of 6.5 °C/km. This approach, ensuring higher time sampling that is comparable with the radar acquisitions and a better representativeness of the spatial domain considered, was preferred over common practice approaches that are based on the use of the nearest (in time and space) radiosounding or on the outputs of numerical weather prediction (NWP) model (e.g., [
5,
29,
31]). In our case, the nearest radiosounding (two lunches per day at 00 and 12 UTC) was 150 km away from the target area, and we wanted to maintain the temperature information used in our algorithm directly derived from measurements.
To check how this procedure agrees with the more customary use of NWP products, a comparison between the isotherm altitudes derived from AWS and NWP model for ten main events in our dataset has been performed. For the NWP model, we considered the Weather Research and Forecasting (WFR) system with a spatial resolution of 6 km in the domain of our interest. The comparison results are satisfactory in terms of Pearson correlation coefficient (=0.98) and Root Mean Square Error (=0.3 km).
3. Radar-Based Stroke Predicting Variables
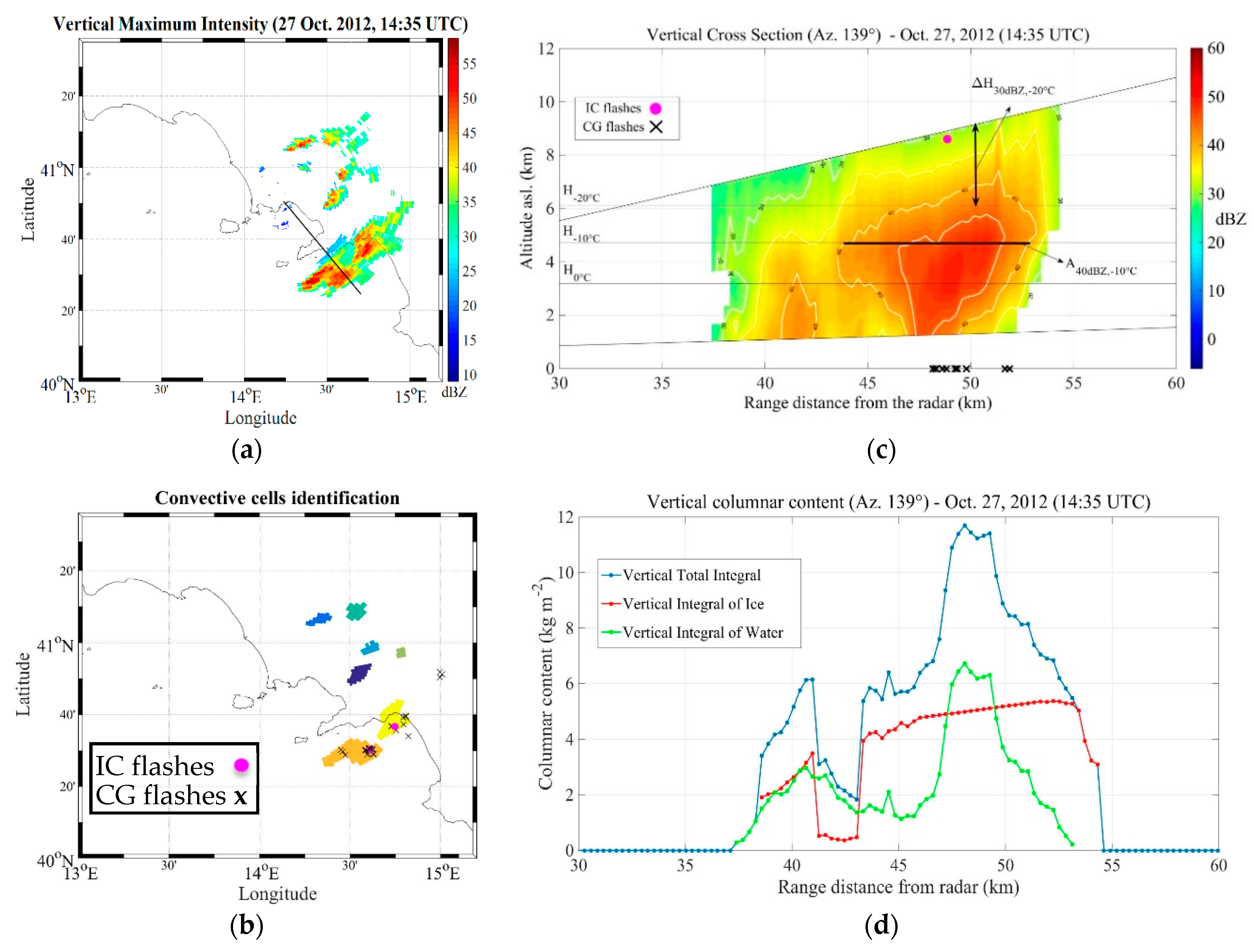
In this study, three radar-based stroke prediction criteria have been evaluated. Such prediction criteria are: the DIH, the Vertical Integral of Reflectivity (VIR) methodology, and the LA technique. Each of the DIH, VIR and LA technique is further fractionated and refined into eighteen different cases by setting proper thresholds. A brief summary of DIH, VIR and LA is given below.
The
DIH approach (∆
HZ,T) is based on the height difference (
H) between a given reflectivity factor level, (
HZ) and an isotherm level, (
HT):
The thresholds for
Z and
T have been fixed to 30 dBZ, 40 dBZ and 0 °C, −10 °C, −20 °C, respectively, leading to five selected values of ∆
HZ,T: ∆
Hmax30dBZ,−20°C, ∆
Hmax30dBZ,−10°C, ∆
Hmax40dBZ,−20°C, ∆
Hmax40dBZ,−10°C, and ∆
Hmax40dBZ,0°C. Note that for each rain cell we can have a distribution of values of ∆
HZ,T, one for each grid point associated to a convective cell. The superscript “
max” in ∆
HmaxZ,T indicates that, for each rain cell, we have selected the maximum value among those that are available. It is worth highlighting that the thresholds of
Z and
T used have been extensively examined in the previous studies, being representative of graupel occurrence in the mixed-phase region of a cumulonimbus (e.g., [
27,
28,
31]).
The
VIR approach relates to the radar-derived estimates of
VIL and
VII into a vertical column.
VIL and
VII have been tested for stroke forecast purposes in some previous studies, which highlighted a low relationship between
VIL and CG strokes events. Therefore, we propose a slight different version of the original
VIL and
VII products, by modifying the boundaries of the integration layer, in order to better separate the liquid and frozen mass contributions and to better characterize their relationship with cloud electrification processes. More specifically, we have introduced the Vertical Integral of Water concentration (
VIW), expressed in kg m
−2, which is the vertical integral of equivalent liquid water content (
Cwat) in the rain layer of a convective cell:
where
HR is the top height of the rain layer (i.e., the depth of the convective cell below the freezing level
H0°C),
HB is the lowest height sampled by weather radar.
Cwat is obtained from
Z measurements through a power-law relationship, using the coefficients that are provided by [
58].
To compute the
VII, which is also expressed in kg m
−2, we have constrained the vertical integration of ice water content (
Cice) to the layer between
H0°C and
HTOP. The latter is the observed cloud top height within a convective cell.
According to [
59], we have used three different
Z-Cice relationships, depending on the temperature value at the reflectivity measurement height. From
VIW and
VII products, we have derived additional predicting criteria: the Vertical Total Integral of equivalent water (
VTI), which is simply the sum between
VIW and
VII, and the density of
VIW,
VII and
VTI (
VIWD,
VIID, and
VTID), that have been obtained by normalizing them to
HR, (
HTOP −
H0°C) and
HTOP, respectively. Moreover, for each of the identified convective cells, we have also computed the Total Water Content (
TWC) and the Total Ice Content (
TIC), defined as:
where
p = 1, ….,
n is the number of radar pixels within a convective cell, ∆
A is the discrete area element (obtained from ∆
A =
r × ∆
r × 2 × tan(∆
ϕ/2), where
r is the distance from radar site, ∆
ϕ and ∆
r are the radar azimuth and range resolutions, respectively) and
Ac is the area covered by a rain cell. Therefore, for VIR method, eight predictors have been evaluated:
VIWmax,
VIImax,
VTImax,
VIWDmax,
VIIDmax,
VTIDmax,
TWC, and
TIC. The superscript
max indicates the maximum value within a convective cell.
The LA approach has been applied using the same reflectivity Z and temperature T combinations involved in DIH criteria. The resulting AZ,T predictive variable is defined for five predictive sets (A30dBZ,−20°C, A30dBZ,−10°C, A40dBZ,−20°C, A40dBZ,−10°C, and A40dBZ,0°C) as the horizontal area at the isotherm T level with a reflectivity value greater than or equal to Z.
6. Results
The robustness of the trained single and multi-parameters method for SRCG detection has been evaluated trough the test dataset, using a metric that includes the CSI, the ETS, the FBI, the HSS, the KSS, and the AUC score. These indexes take into account at least three of the four contingency table categorical events and, therefore, we believe they provide a robust and objective assessment of each proposed method skills.
The verification analysis outcomes are summarized in
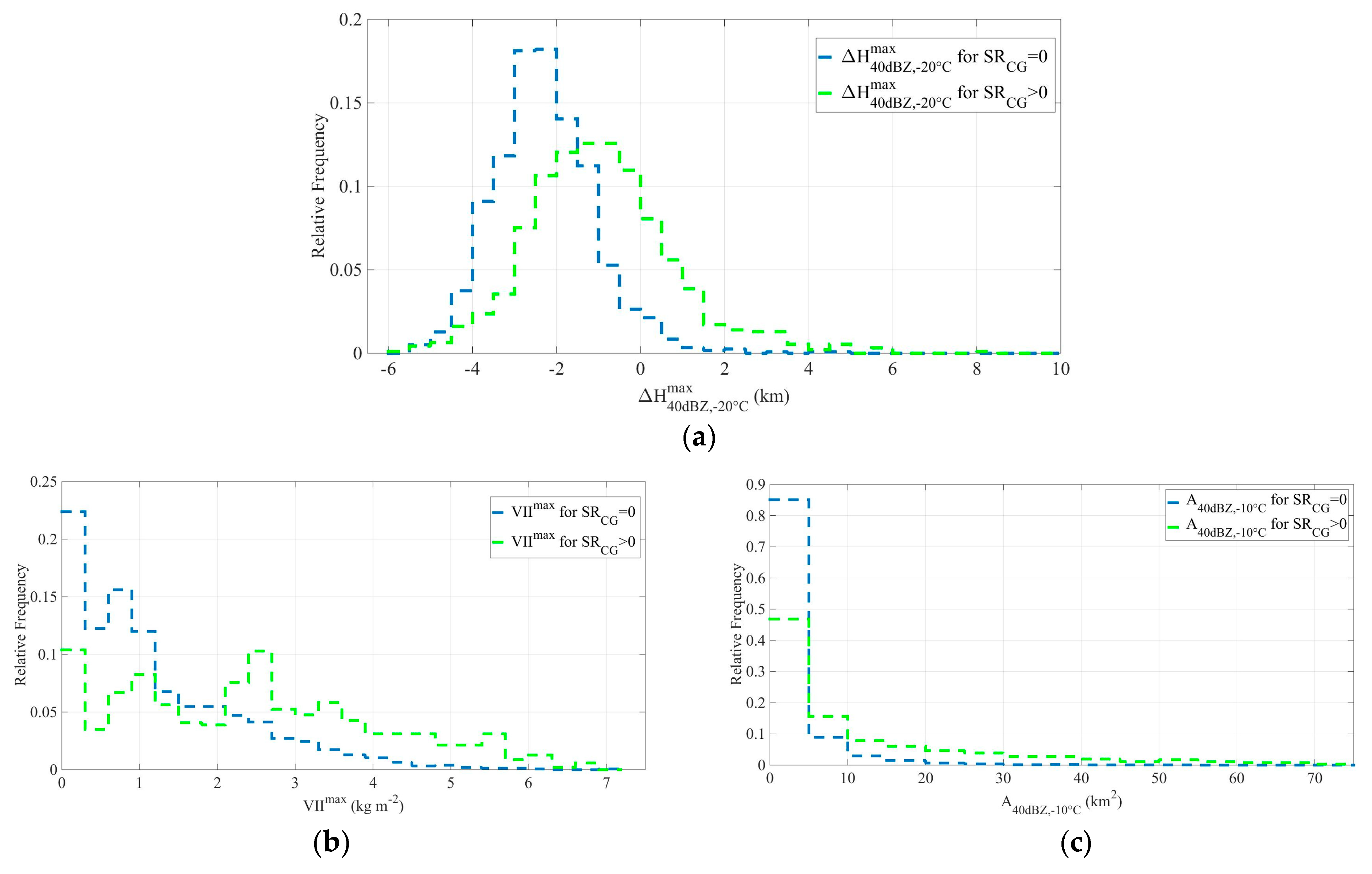
Table 6. It lists the score indexes when the variables
x1 = ∆
Hmax40dBZ,−20°C,
x2 =
VIImax, and
x3 =
A40dBZ,−10°C are used independently from each other (single variable approach) or merged using various classification techniques (multi-variable approach). Firstly, it is important to highlight that the QDA-based method outperforms the other detection criteria, showing a CSI of 0.53, an ETS of 0.34, a FBI of 1.00, a KSS of 0.42, and an AUC score of 0.78. On the other hand, the SVM-G technique exhibits the best performance in terms of HSS (0.43). Thus, none of the single-parameter criteria is able to maximize the considered statistical scores, even when the detection thresholds of each single variable approach are optimized using the training dataset. This result is important, because it justifies the multi-variable approach and encourages the use of different radar-based predicting variables, since they may bring benefits in the detection of stroke activity that is associated to convective cells.
A quantitative evaluation of the improvements introduced by the QDA method with respect to the worst and the best single-variable criterion is presented in the last two columns of
Table 6. The improvement has been expressed in percentages, computed from the normalized difference between the score obtained with the QDA method and the best and worst score among the single variable methods. The improvement percentage varies between 2% and 70%, depending on the specific skill score and the stroke radar-based proxy parameter considered. It is worth emphasizing the improvement that is obtained for HSS increasing from 7.0% to 27.0%, as well as that observed for KSS, varying between 10.5% and 16.0%. The HSS, in fact, may be considered a form of generalized skill score [
62], evaluating the accuracy of detection with respect to a random choice. The KSS score gives equal emphasis to the ability of the detection method in identifying both the correct and correct negative of
SRCG (see
Appendix A for details). Therefore, when considering HSS and KSS indexes, the use of the multi-parameter approach enhances the
SRCG detection capability with respect to a random choice.
The scatter diagram in
Figure 7 provides a further evidence of the QDA method performance, showing a comparison between ground-based LINET observations and radar-based estimates, in terms of daily number of convective cells that produce
SRCG > 0. LINET and radar data exhibit a good agreement, synthetized by the linear correlation coefficient, whose value is 0.95. However, the radar-based algorithm generally underestimates the number of
SRCG > 0 events, especially in thunderstorm days that are characterized by a strong atmospheric electrification, i.e., by a great number of stroke-producing convective cells. Such a result may be related to a residual influence of radar issues discussed in
Section 2.1, whose quantitative impact on detection scores is discussed in the next paragraph.
The results of our study may be compared, with some caution because of the difference in weather radar systems and in climatic contexts, only to previous works, including a number of convective cells of the order of 10
3, which is the case of four studies [
5,
29,
31,
32], and only in terms of CSI score (
Table 1). In [
29], 1164 rain cells have been analyzed using the occurrence of 40 dBZ at −10 °C updraft level as proxy of stroke activity; this work found a CSI of 0.86, which is much higher than CSI determined in our study and in [
5,
31,
32]. As highlighted in [
31], such discrepancy may be explained by local convection features, which, in some climatic contexts, may better fit the radar-based proxies of stroke events. Moreover, the difference with [
29] may be also related to the radar system and to the scan strategy used to design the stroke detection algorithm. The CSI index that is yielded by our multi-parameter algorithm is very similar to the one achieved by the IRT-based methods developed in [
31,
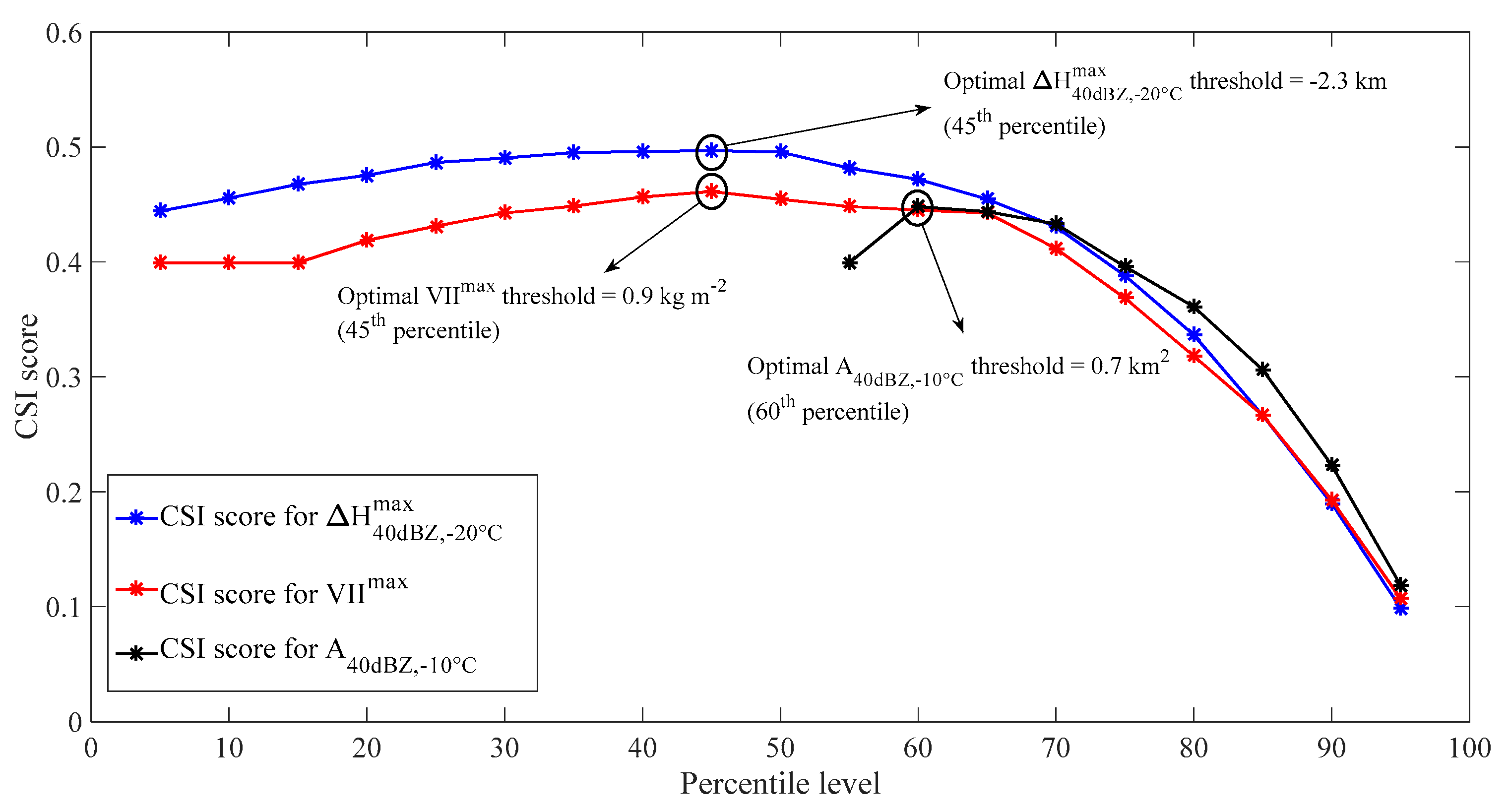
32], which ranges from 0.44 to 0.56. In [
31,
32], a method that is based on
VII has been also proposed, resulting in a CSI score of 0.68 and 0.47, respectively. In our study, the single-parameter detection method based on
VII shows a CSI of 0.48 for an optimal threshold of 0.9 kg m
−2. This result is not very different from the best values found in the two previous studies (0.42 kg m
−2 and 0.58 kg m
−2 for [
31] and 0.84 kg m
−2 for [
32]), although it corresponds to a higher percentile level (45th) than the ones that are found in literature (the 10th and the 15th for [
31] and 30th for [
32]). It is interesting to point out that our results are better that those achieved in [
5], where a significantly more efficient and advanced radar system (C-band, dual polarization) has been used. Although it cannot be generalized, this finding may be attributed to the very high number (of order 10
5) of convective cells considered in [
5] and to the difference in the method adopted for the stroke activity detection. In fact, in [
5], the maximum height of 20 dBZ reflectivity core has been used, but this variable is not necessarily well correlated with the presence of deep riming precipitation ice within convective clouds, and hence, to lightning.
Sensitivity Analysis
As previously discussed, the quality of the data obtained by WR-10X radar may be adversely affected by some impairments. In order to evaluate the quantitative impact of such issues on stroke detection scores, a comprehensive sensitivity analysis has been performed. This additional investigation focuses on the QDA-based criterion, which has given the best performance among the multi-variable approaches tested in this study. To examine the consequences of the considered challenges, various subsets of convective cells have been extracted from the test dataset. Those subsets reproduce some “ideal” sampling scenarios, allowing for characterizing the impact of the following issues:
attenuation along the path. In the framework of this study, the impact of attenuation issue has been properly characterized and quantified, by testing the performance of the proposed algorithm for stroke detection for two different cases of non-attenuated and attenuated rain cells. We have defined as non-attenuated rain cells, those not showing any precipitating structure along the line of sight between the radar position and the rain cell itself. All the other rain cells are labeled as attenuated rain cells. The number of non-attenuated and attenuated cells is 1418 and 1756, respectively. Obviously, for the set of “non-attenuated rain cells”, we cannot exclude residual path attenuation effects within each single rain cell.
Radar beam obstruction from Volcano Vesuvio (40.8226°N, 14.4292°E). This challenge has been investigated by a test subset, devoid of convective cells in the azimuthal directions ranging between 89.95° and 107.95°, which are in the blind zone of the radar due to Vesuvio relief. Such a subset includes 3005 rain cells; and,
radar beam width. To analyze the impact of such issue, the behavior of the score indexes has been analyzed in relation to the range (i.e., distance from the radar site). More specifically, four different subsets have been considered, including the rain cells located within a certain distance interval, i.e., 30–40 km, 40–50 km, 50–60 km, and >60 km. The number of convective cells belonging to such subsets is 987, 959, 677, and 551, respectively.
The results of sensitivity analysis for all considered sampling scenarios (including the one in which the entire test dataset is employed) are listed in
Table 7. It highlights, in first instance, that the attenuation does not exert a relevant influence on score values. As expected, in the non-attenuated scenario, a slight improvement of the indexes is observed, especially for HSS and KSS scores. The results also point out that Vesuvio does not negatively affect the radar ability to correctly sample the mixed-phase region of a thunderstorm, where lightning activity mostly originates, typically sampled at antenna elevation angles larger than 3°. Furthermore, three of the five scores, CSI, HSS, and KSS, exhibit an opposite behavior as a function of the distance from the radar site. The CSI index maximizes in the scenario that takes into account only the convective cells occurring at a distance greater than 60 km. The positive trend of CSI index with increasing distance from radar site can be attributed to the improvement in mixed-phase region radar sampling. The latter results in a growth of hits (i.e., number of times that a stroke event is detected by a radar and is observed by LINET network) and in the decrease of false alarms (i.e., number of times that a stroke event is observed by radar, but not detected by LINET network), which lead to an improvement of CSI. Conversely, the HSS, KSS, and AUC scores get worse with increasing distance, because of the increase of misses (i.e., instances of stroke event occurring despite not being detected by radar) and to the decrease of correct negatives (i.e., instances of stroke event not identified by radar and not observed by LINET network). At long ranges, in fact, the relatively broad beam width (<3° at 3 dB) of WR-10X radar and the beam blockage induced by orography in some azimuthal directions, may have a negative impact on the vertical sampling of convective clouds.
7. Conclusions
This study presents a multi-parameter criterion for CG stroke detection, based, for the first time, on the measurements of a single-polarization X-band weather radar. The architecture of the proposed method is structured into two different steps: (i) rain cell identification and stroke predicting variable extraction and (ii) Stroke rate estimation using single variable or multi variable classification techniques. After a training procedure and objective analysis on a large dataset that was collected in the area of Naples, Italy, we have identified three radar-based predicting variables that are more related to strokes detected by the LINET network: the difference between the maximum 40 dBZ height and the −20 °C level, the vertically integrated reflectivity in the ice layer of the cloud, and the total area where reflectivity values larger than 40 dBZ at the −10 °C isotherm level are found.
The stroke detection results highlight that the multi-parameter approach based on Quadratic Discriminant Analysis classification produced an improvement with respect to classical single-parameter criteria, which varies between 6% and 70%, depending on the specific statistical score and the stroke radar-based proxy parameter considered. The QDA-based algorithm also outperforms the other multi-parameter methods that were developed in this study (relying on Fuzzy Logic and Support Vector Machine techniques) for all considered scores, except for the HSS index, whose value maximizes in Support Vector Machine approach with Gaussian kernel function. Moreover, a further examination has been carried out by comparing, for each of the thunderstorm days analyzed, the number of rain cells producing strokes as observed by LINET network, and the one detected by the radar-based algorithm. This analysis points out that ground-based observations and radar estimates are highly correlated over a time period of 24 h, although the proposed algorithm generally underestimates the number of rain cells with lightning activity.
It is important to highlight that the performances of X-band weather radars are notoriously affected by beam attenuation along the path. In order to quantify the impact of such issue, a sensitivity analysis has been carried out. The results show that the incidence of attenuation on the performance of the proposed algorithm is relatively low. This is likely because the methodology that was developed in this work has been trained and tested on small spatial scales, i.e., within a maximum range of about 70 km. However, a range-dependent behavior of statistical score indexes has been detected. More specifically, lower HSS and KSS values (with an increase of misses and a decrease of corrective negatives) are observed for convective cells that are located more than 60 km away from the radar site. This is compensated by higher CSI (increase of hits). These potential biases in the estimation of SRCG produced by rain cells may arise from the large antenna beam width of the weather radar involved in this study, which adversely affects the sampling of convective structure at long range.
In the light of the findings of this work, the radar-based schemes designed for the detection of CG stroke events may benefit from a multi-parameter approach, including different radar proxies that well represent the processes that occur in the mixed-phase region of a thunderstorm. Future work will be primarily devoted to test the methodology that is introduced in this study in other areas, particularly in contexts where a network of X-band weather radar is used for monitoring and nowcasting needs. Such evolution of research activities can also have relevant meteorological and climatological implications, involving the tuning of radar-based predictors into environments characterized by different microphysical and kinematic properties that are critical for cloud electrification. Moreover, forthcoming studies will be also focused on the development of radar-based CG stroke detection algorithm based on different classification schemes, such as decision trees and random forest. Finally, additional studies will be carried out to examine, from physical and microphysical points of view, the relationships among the various radar-based stroke predictors that are involved in this study and their linkages with other atmospheric parameters (e.g., convective available potential energy, lifted index, wind shear, etc.) that are potentially very useful for stroke detection and/or forecast.

 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






