Distributed Coordinated Control of Offshore Doubly Fed Wind Turbine Groups Based on the Hamiltonian Energy Method


1
College of Energy and Electrical Engineering, Hohai University, Nanjing 211100, China
2
School of Automation, Hangzhou Dianzi University, Hangzhou 310018, China
*
Author to whom correspondence should be addressed.
Sustainability 2017, 9(8), 1448; https://doi.org/10.3390/su9081448
Submission received: 1 July 2017
/
Revised: 9 August 2017
/
Accepted: 10 August 2017
/
Published: 16 August 2017
(This article belongs to the Section Energy Sustainability)
Abstract
:To support doubly fed wind turbine (DFWT) groups in offshore wind farms, this paper proposes a distributed coordinated control based on the Hamiltonian energy theory. This strategy provides global stability to closed-loop systems and facilitates output synchronization. First, a model of a DFWT is realized as a port-controlled Hamiltonian system with dissipation (PCH-D), and the single-machine model is expanded into a multi-machine model of a wind turbine group. Then, by using the design methodology of distributed Hamiltonian systems, a distributed coordinated control is presented for a multi-machine PCH-D system. Furthermore, to investigate failures in wind turbine groups, they are divided into two cases: the separation of failed machines from the system, and the grid-connected operation of failed machines after a fault. These cases correspond to undirected and directed graphs, respectively. Finally, simulations prove that distributed coordinated control enhances the reliability and autonomy of wind turbine groups in offshore wind farms.
1. Introduction
Over the last decade, the development of wind-power generation systems has progressed rapidly, and significant advancements have been achieved. Furthermore, wind-power control technology has gained increasing research interest [1,2,3,4]. Recently, the research focus has shifted from simple-machine control to cluster control, and the coordinated control of multi-machine systems has become an attractive topic [5,6]. Offshore wind power has many advantages, such as abundant reserves, steady wind speed, and no land occupation. Consequently, numerous offshore wind farms have been built and more are planned; in addition, the amount of research related to offshore wind farms has increased steadily [7,8,9]. However, the negative impacts of offshore wind power cannot be ignored. Larger wind farms are far away from the shore and unmanned, and must operate in a complex environment. Therefore, offshore wind farms must have higher reliability and flexibility compared to onshore wind farms. The centralized control methods used in land-based wind power systems are not suitable for offshore wind power systems. Centralized control means centralizing risks. When communication lines or control devices malfunction, the control of the entire wind farm may be lost. To improve the reliability of offshore wind farms, we adopt distributed control instead of centralized control; this strategy can distribute the risk and increase the flexibility of the entire system.
Distributed control systems are a class of dynamic systems in a distributed space, and are derived from a large number of engineering examples, such as wireless sensor networks, spacecraft flying formations, and systems that coordinate multiple robots [10,11]. With the rapid development and broad applications of network technology, distributed systems tend to be networked, intelligent, and integrated [12,13]. An offshore wind farm can be perceived as a distributed network: each wind turbine is regarded as a network node, and the communication lines are regarded as the links between the nodes. The nodes of the system communicate with each other via the links in the network. On this basis, a distributed control strategy for wind turbine groups can be designed to distribute the risk that the centralized control may bring. Even if problems occur with the communication lines or a single machine, the entire wind farm does not break down, and failure losses can be minimized.
In this paper, a single-machine model of a DFWT (doubly fed wind turbine) has been developed according to a model of a wind turbine group based on the Hamiltonian energy method [14,15]. This energy-based control method can thoroughly take advantage of the structural properties, to allow the Hamiltonian energy function to be designed with the physical meaning. In addition, the Hamiltonian function comes from the viewpoint of energy and avoids the difficulty of constructing a Lyapunov function. Accordingly, this method becomes a powerful tool for designing the controllers of nonlinear systems.
First, based on the Hamiltonian energy method, a Hamiltonian realization of a single-machine system is achieved, and a PCH-D (port-controlled Hamiltonian system with dissipation) model is obtained using pre-feedback control. Subsequently, some basic concepts of graph theory are introduced to expand the single-machine PCH-D model to a multi-machine PCH-D model of a wind turbine group. Next, the output synchronization of the PCH-D system is defined, and a distributed coordinated control is proposed to enable the wind turbine group to achieve output synchronization. Furthermore, we research the control effect of the closed-loop system under failure conditions. The stability has been proved for the topological structures in undirected and directed graphs, which correspond to failed-unit splitting and grid-connected operation, respectively. Finally, it is shown using simulations that, regardless of whether failed machines are separated from the system, the distributed coordinated control can improve reliability and reduce the failure losses of offshore wind farms.
In conclusion, the main contributions of this paper include the following three aspects. First, instead of utilizing conventional centralized control, a distributed control strategy is proposed for offshore wind farms. Second, as the latest development in Hamiltonian energy theory, the design of a distributed Hamiltonian system is applied to the modeling and control of DFWT groups. Third, the effectiveness of the Hamiltonian control strategy is verified in both directed and undirected networks; this provides a design method for controlling wind turbine groups under failure conditions.
2. Single-Machine Hamiltonian Realization of Doubly Fed Wind Turbine
This section presents the Hamiltonian realization of the single-machine wind power system, which is not only the foundation of the Hamiltonian modeling of a wind turbine group, but also the premise of the distributed Hamiltonian method to be applied to wind turbine groups.
2.1. Single-Machine Model of Doubly Fed Wind Turbine
A DFWT includes a transmission gear and doubly fed induction generator. The transmission gear can be expressed as a first-order model; the doubly fed induction generator can be described as a second-order model when ignoring the electromagnetic transient of the stator. In this paper, the third-order model [16] of DFWTs is as follows:
where , , , s is the rotor slip, is the total inertia constant of the turbine and the generator, is the active output power of the stator, is the reactive output power of the stator, is the mechanical power of the wind turbine, is the stator self-inductance, is the rotor self-inductance, is the mutual inductance, is the rotor resistance, is the synchronous angle speed, is the stator reactance, is the stator transient reactance, and are the d-axis and q-axis stator currents, respectively, and are the d-axis and q-axis transient voltages, respectively, and and are the d-axis and q-axis rotor voltages, respectively. Hence, Formula (1) is the double-input third-order model of a wind turbine, where s , , and are the states of the system; and are the inputs of the system.
First, the wind turbine model (1) can be rewritten in the following form:
Next, the Hamiltonian realization is achieved according to the Hamiltonian energy method [17].
2.2. Single-Machine Hamiltonian Realization
For the system model (1), the Hamiltonian energy function can be constructed as
By using the energy function (3), the system model (2) can be expressed as a port-controlled Hamiltonian system (PCH), which is as follows:
where .
Furthermore, we need to transform the PCH system into the PCH-D form, which is achieved through pre-feedback control. The whole control law is expressed as
The control law (5) includes two parts: the pre-feedback K and the output feedback . To satisfy the PCH-D form, the pre-feedback K is designed as
Substituting Equation (6) into Equation (4), the closed-loop system can be rewritten in the following PCH-D form.
where , , .
Clearly, J is a skew-symmetric matrix, and R is a positive semidefinite matrix. Thus, the model (7) matches the PCH-D form. Its output equation is expressed as:
3. Distributed Coordinated Control of DFWT Group
The main purpose of this paper is to investigate the method of coordination of multiple wind turbines in an offshore wind farm and achieve output synchronization using distributed control. First, we need to construct a model of a wind turbine group containing network topological information from a single-machine Hamiltonian model. A distributed Hamiltonian design is then proposed to solve the coordination control problem of wind turbine groups. In this section, we first introduce some basic concepts of graph theory as the theoretical basis for the network description of a wind turbine group. Next, the output synchronization of a wind turbine group is defined and the distributed coordinated control is designed. Finally, the main results of this study are described.
3.1. Graph Theory
Multiple wind turbines that are connected to each other in an offshore wind farm form a network in which each wind turbine is regarded as a node. Information from every wind turbine is exchanged within the network, which works as the basis of distributed coordinated control. The related graph theory terms are given as follows [18].
Consider n nodes that interact with each other; the relationship between them can be expressed as a directed or undirected graph. A graph G consists of a node set and an edge set . If the edge of the graph is an unordered pair of nodes, which means (), the graph is undirected. Similarly, if the edge of the graph is an ordered pair of nodes, which means , it is a directed graph. is the adjacency matrix. When , ; otherwise, . The neighbor nodes of can be expressed as . The in-degree (that is, the sum of the elements of the i-th row of matrix A) of node i is defined as . Then, the in-degree matrix is defined as and the Laplacian matrix L is defined as . If we can always find a path between any two nodes in an undirected graph, it is called a connected graph; in a directed graph, it is called a strongly connected graph.
An important lemma is needed for the following analysis and proof, which is given as follows:
Lemma 1.
If the network topology is a strongly connected graph and the connection weights , then there exists a vector γ being constituted by positive elements, which satisfies [19].
3.2. Output Synchronization Problem Description
Based on the graph theory, the PCH-D model (7) of a single DFWT can be expanded to that of a wind turbine group. Then, the definition of output synchronization is given. In the following content, if it is not specified.
The PCH-D model of a wind turbine group is described as
where the state vector of the i-th wind turbine is ; the input is ; the output is ; the gradient of the Hamiltonian energy function is ; , , and are identical to J, R, and G in Equation (7), respectively, and the only difference between them is that , , and have the index i with each variable, which represents the parameters of the i-th wind turbine.
The output synchronization of the system (9) is defined as follows:
Definition 1.
Consider a network system consisting of N PCH-D nodes (9); if the output of every node satisfies
where represents the Euclidean norm, then the system is said to have output synchronization [20].
3.3. Coordinated Control of Wind Turbine Group
Theorem 1.
Consider a DFWT group (9) in an offshore wind farm; if its network topology is a connected undirected graph, and the coordination control is designed as
where is the adjustable gain, is the weight of the link between adjacent nodes i and j, in the communication network of the wind farm. Then, the closed-loop system composed of (9) and (11) is globally stable, and all wind turbines can achieve output synchronization.
Proof.
Take the Hamiltonian energy function of the entire system , and the derivative of Hamiltonian energy function is
Substituting the coordinated control law (11) into the above equation yields
Notice that the topological structure of the network is an undirected graph and the Laplacian matrix of the system is symmetrical; then
The Hamiltonian energy function can satisfy , where is the equilibrium point. Then,
and is a Lyapunov function of this system. Therefore, the closed-loop system is globally stable and all the output signals are bounded. Furthermore, consider the set
Owing to , for , the invariant sets can be written as and . When the conditions in their intersection are satisfied, it is known that . According to LaSalle’s invariant set theorem [21], when , all solutions of the system converge to the set and all the wind turbines can achieve output synchronization. ☐
Combining the coordination control (11) with the pre-feedback control (6), the control strategy of the i-th wind turbine is
where
Therefore, the control strategy is composed of two parts: the pre-feedback control (14) is designed for realizing the PCH-D form and stabilizing the single unit; the coordinated control (15) is proposed to coordinate multiple wind turbines in the wind farm and achieve the output synchronization of the wind turbine group through the communication network.
The above result can be concluded as Theorem 2, which is the main conclusion of this paper.
Theorem 2.
Consider a DFWT group in an offshore wind farm:
Under the action of the pre-feedback control (14), the system can be transformed into PCH-D form:
It is known that the topological structure of a wind farm is a connected undirected graph. By using the coordinated controller (15), the closed-loop system is globally stable, and all doubly fed wind turbines in the wind farm can achieve output synchronization.
Remark 1.
When the output of the wind turbine group is synchronized, the output of each wind turbine is
It is known that from the set (12), which means
Hence,
Note that the active output power of the wind turbines is . When the output of every turbine is synchronized, we have
which means that if every wind turbine absorbs the same mechanical power, it will produce the same active output power. Considering that there are good wind resources on the sea and no adverse influences between the machines, it can be assumed that the wind energy absorbed by every wind turbine in the same wind farm is equal. Hence, the machines in a wind farm can achieve output synchronization and generate the same active power under the action of coordinated control. Furthermore, if a few failed wind turbines disconnect after failure and the network still forms a connected undirected graph, other wind turbines will operate normally without influence, which has been proved in Theorem 1.
4. Distributed Coordinated Control of Wind Turbine Groups in Failure Cases
According to the relationship between a failed machine and the wind turbine group, there are two possible cases: ① separating the failed machine from the network and changing the network structure; ② the failed machine continues to run in the group and the network structure remains unchanged. In the previous section, we described our research on the first case. In this section, we describe our investigation into whether the proposed distributed coordinated control works in the second case.
If the failed machine still connects with the grid after failing, it may adversely affect the other machines in the network. To eliminate the impact of the failed machine, we can allow it to receive information from other normal units but not give information. Thus, the communication network cannot be regarded as an undirected graph, but as a directed graph. Therefore, it is necessary to expand the result of the undirected graph to a directed graph. Consequently, Theorem 1 is transformed into the following theorem.
Theorem 3.
Consider a wind turbine group in an offshore wind farm (9), which includes the failed machine and the group of other machines . If the topological structure of the communication network of the group is a strongly connected directed graph, the distributed coordination control of the normal machines is designed according to Equation (11) and the control of the failed machine is changed into
where is the adjustable gain. Then, the closed-loop system given by Equations (9), (11), and (21) is globally stable and all wind turbines other than the failed machine can achieve output synchronization.
Proof.
Since the network topology of the group is a strongly connected directed graph, based on Lemma 1, it is known that there exists a vector satisfying , where and is the Laplacian matrix for the communication network without the failed machine. The Hamiltonian energy function of the whole network is set as
By taking its derivative and substituting the distributed coordination control (11) into it, we have
Since the topological structure of the network is a directed graph, the Laplacian matrix is usually asymmetrical. Then,
where , is the matrix form of . From Lemma 1, it is known that .
Thus, the closed-loop system is globally stable, and all of the output signals are bounded. Similar to the proof of Theorem 1, all of the wind turbines, other than the failed machine, can achieve output synchronization under the action of the coordinated control. ☐
From the theorem above, it is known that when the failed wind turbine connects to the grid after a failure, the topological structure of the network is a directed graph, in which other wind turbines can still run normally and the failed wind turbine works alone without sending out any messages. Thus, irrespective of whether the failed wind turbine disconnects, the proposed control strategy reduces the impact of the failure on the wind farm and keeps other machines working normally in an unattended condition. Therefore, a closed-loop system under distributed control has higher reliability and flexibility than the one under centralized control.
Remark 2.
If the proposed control strategy is applied to real offshore wind farms, the following questions need to be considered. The first question is the control performances of the wind farm when the parameters of wind turbines are not correctly identified, especially since the PCH-D model is derived from a perfect knowledge of those parameters. Hence, the robust control problem of PCH-D need to be further addressed. Second, it is assumed that every wind turbines absorbs the same wind energy and produces the same active power. In real wind farms, the interaction between wind turbines is unavoidable and the wind energy absorbed by each wind turbine cannot be the same. However, if these wind turbines in an offshore farm work in the constant power stage, the output synchronization and power synchronization can be achieved under the action of the distributed coordinated control. Third, an offshore wind farm is seen as a network, in which the wind turbines are the nodes and the communication lines are the links. In real wind farms, the causes of failure are more complex than the cases considered in this paper, which are possibly caused by the failure wind turbine or the failed communication line. Some of them can be solved or partially solved by the proposed distributed control, yet more problems cannot be solved.
5. Verification of Simulations
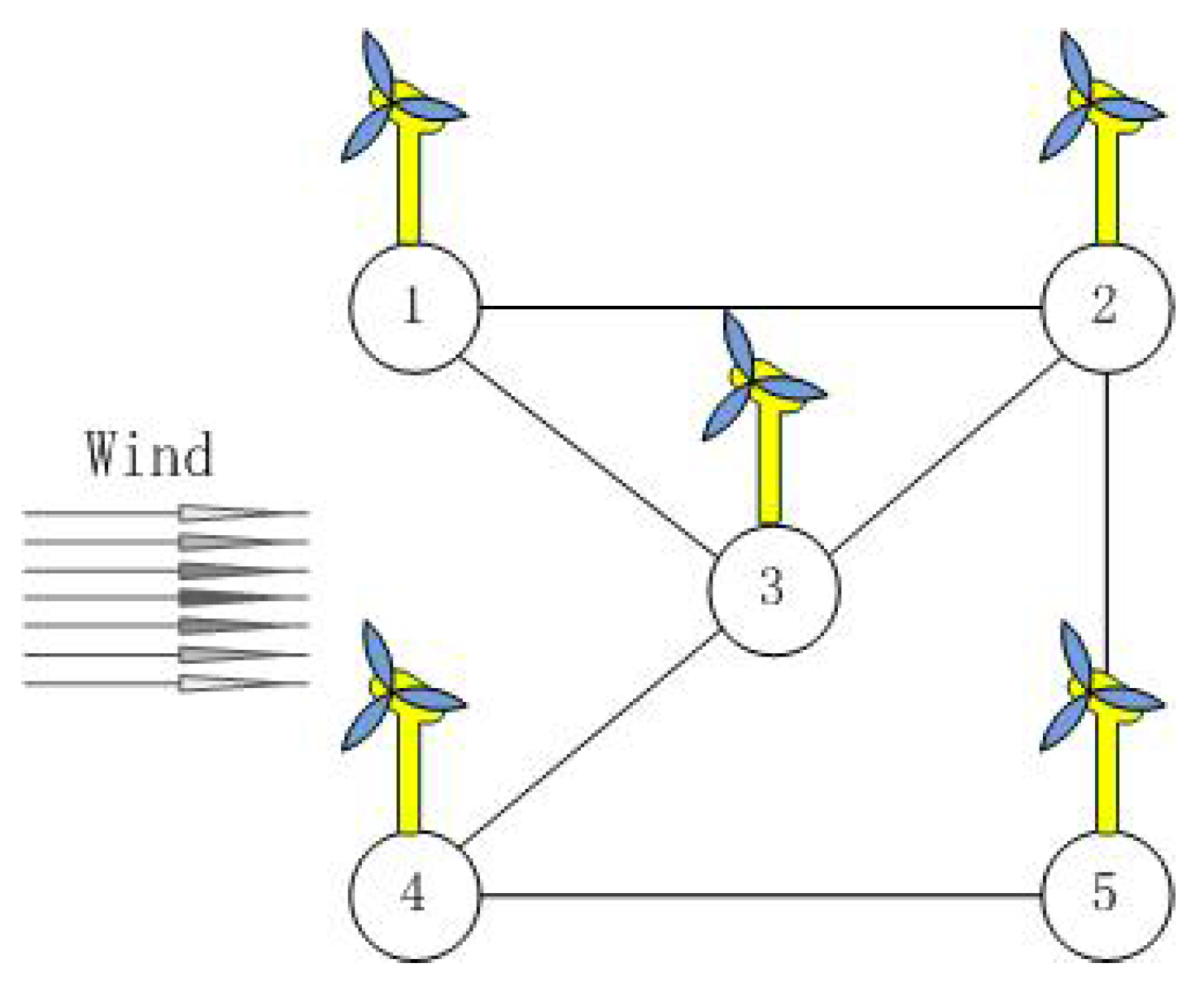
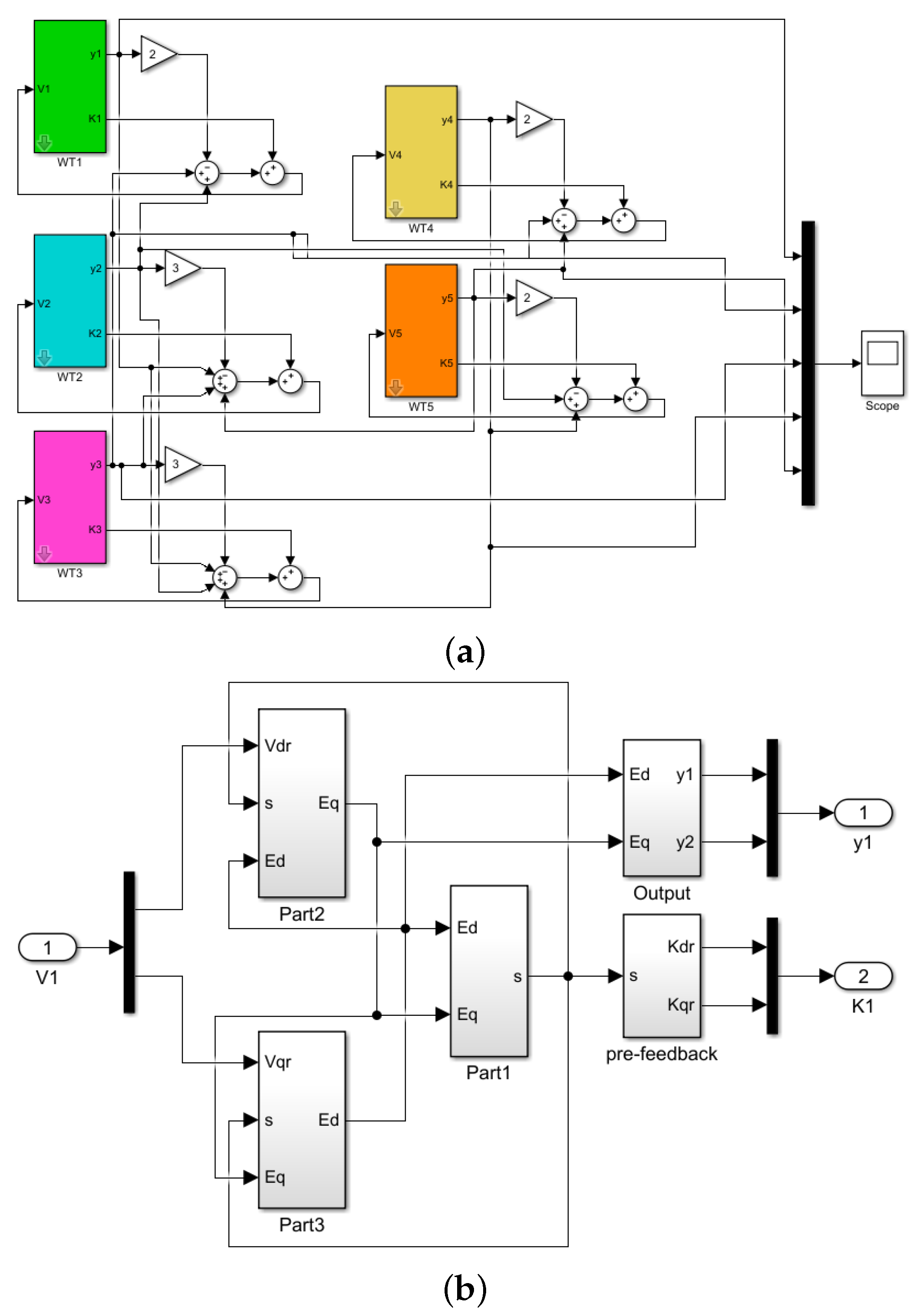
When simulating with MATLAB (R2012a, MathWorks, Natick, MA, USA), we first verify the control effect of the closed-loop system when no failures are present. Accordingly, the failure cases can be divided into two categories: in Case 1, the failed machine disconnects from the grid after failure; in Case 2, the failed machine connects to the grid after the failure. The control results under these two conditions are verified. The simulation system includes five doubly fed wind turbines; the network structure is given in Figure 1. The wind comes from the left. The key parameters are given in Table 1 [16], where , , DFWT is the abbreviation of doubly fed wind turbine. The block diagram of the control structure implemented in MATLAB is presented in Figure 2.
5.1. Results of Distributed Coordinated Control before Failure
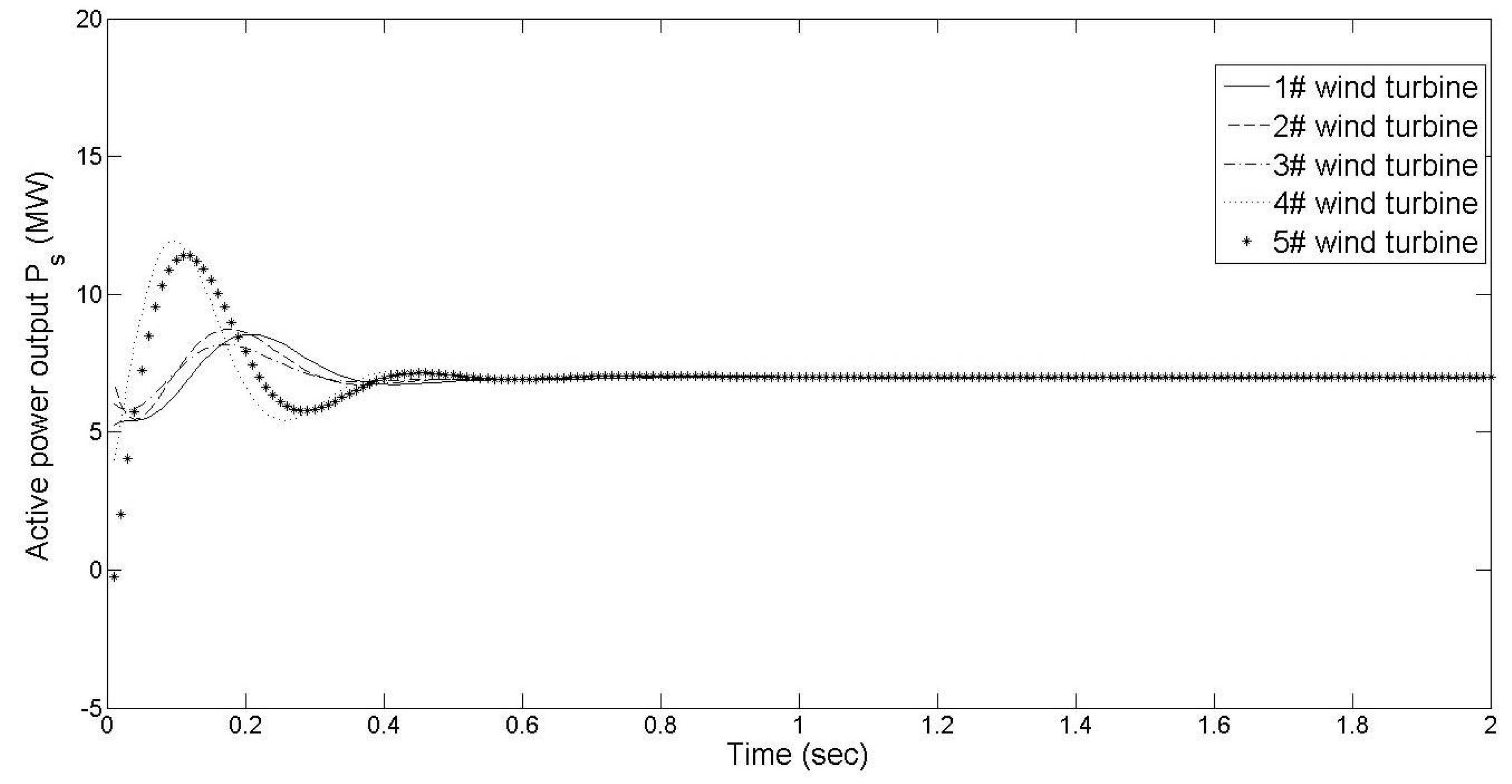
Since wind on the surface of the sea is evenly distributed and the wind turbines are far away from each other, it can be assumed that the mechanical power absorbed by each wind turbine is equal. The simulation results under the coordinated control are shown in Figure 3. From the results, we can conclude that the five machines in the wind farm can achieve output synchronization rapidly and produce the same active power.
5.2. Results of Distributed Coordinated Control in Case 1
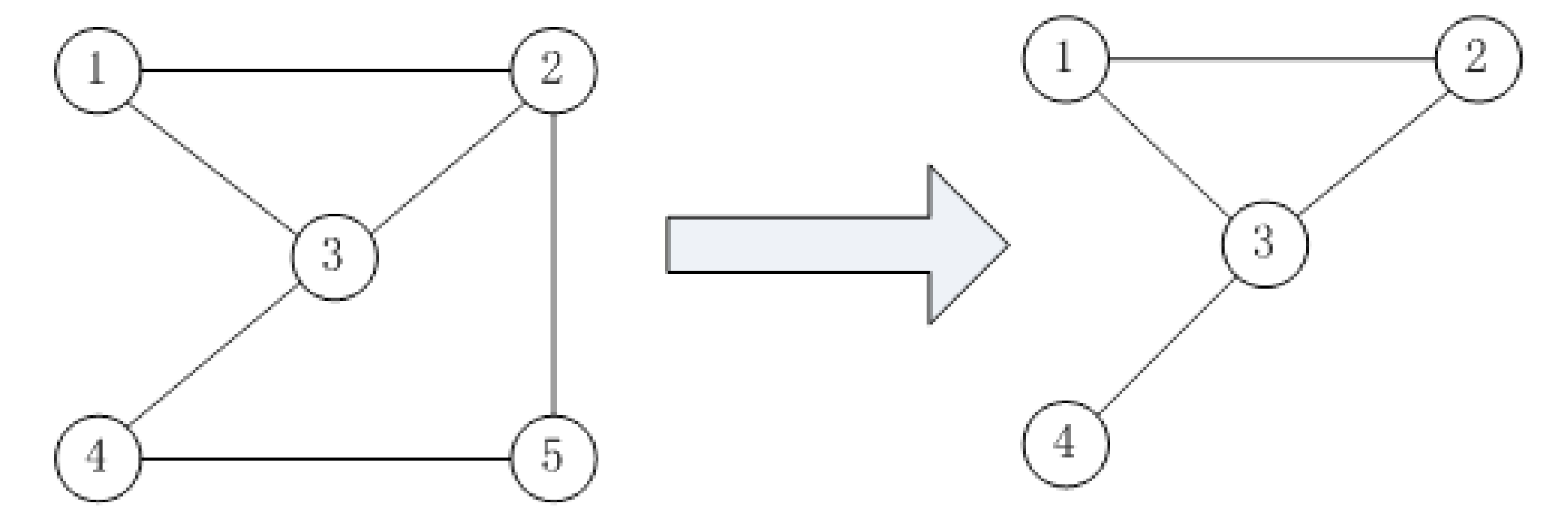
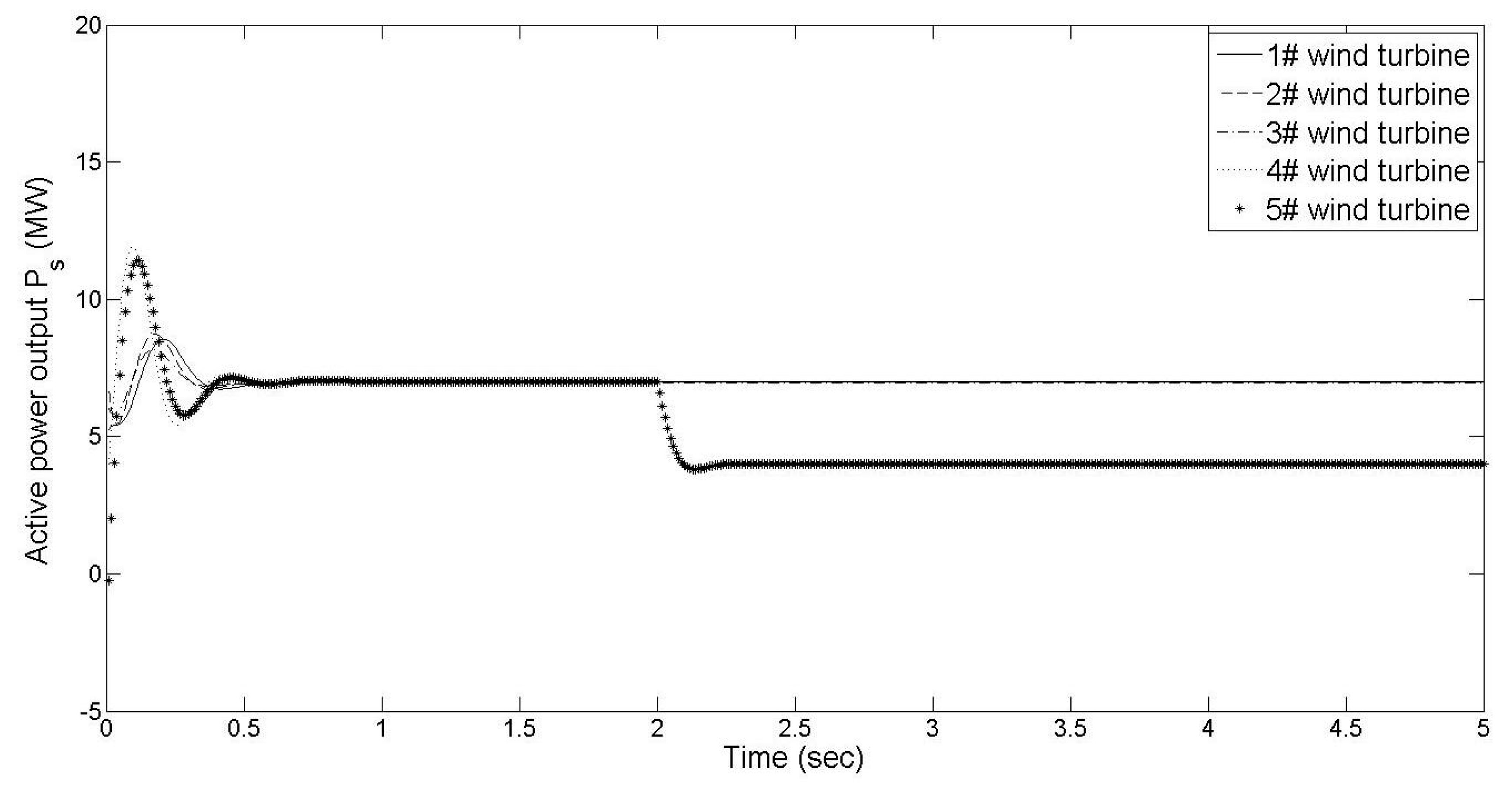
The process description is as follows: the fault occurs in the machine at node 5 at 2 s, and it ceases to operate. Hereinafter, this machine will be referred to as the 5th machine. At 2.5 s, the failed machine is separated from the network. The change in the topological structure is shown in Figure 4. Curves showing the changes in active output power during the process are shown in Figure 5.
From Figure 5, it is shown that the process before and after failure can be divided into three stages: ① from 0 s to 2 s, all wind turbines work synchronously; ② at 2 s, the fault occurs in the 5th machine, whose output power falls to 0. From 2 s to 2.5 s, the 5th machine is still connected to the network; this affects the other machines and makes their outputs deviate from the synchronous state. (The 2nd and 4th machines deviate first, and then the 1st and the 3rd machines do.); ③ at 2.5 s, the 5th machine is cut off from the network and the topological structure is changed, as shown in Figure 4. Accordingly, the other machines quickly return to the synchronous state.
5.3. Results of Distributed Coordinated Control in Case 2
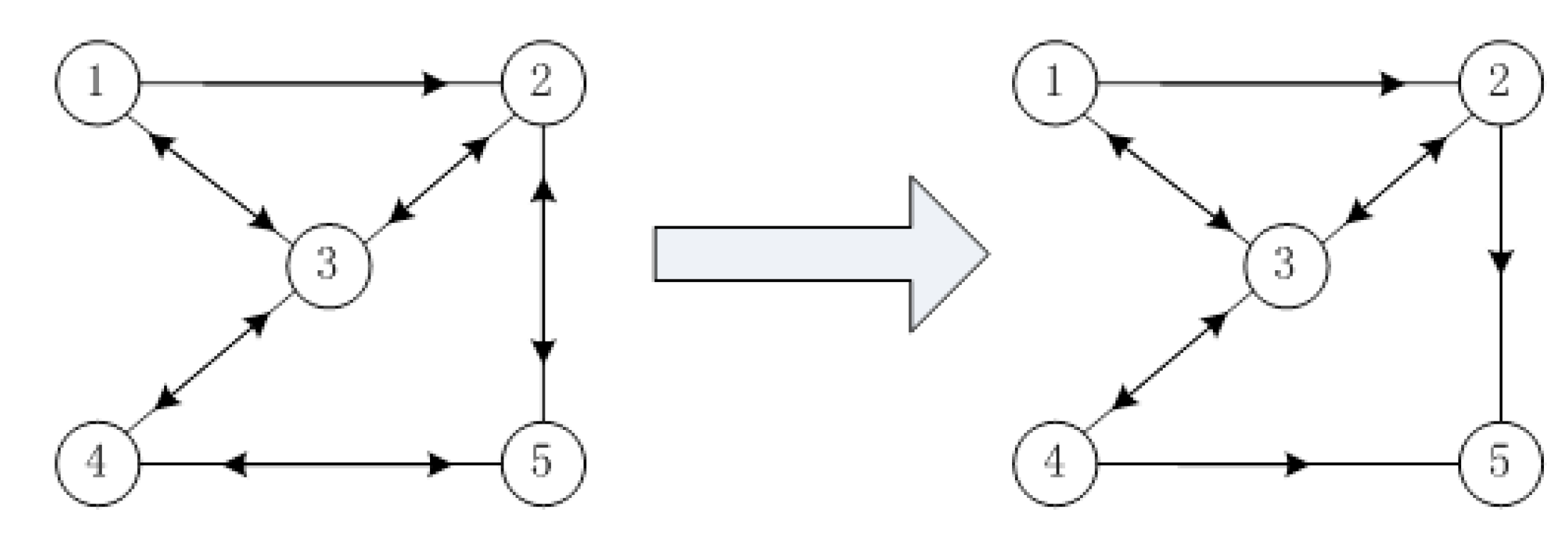
The process description is as follows: the failure occurs in the 5th machine at 2 s, and it cannot work normally. Since the 5th machine can still generate power, it is not removed from the network. However, to eliminate its adverse impact on other machines, the 5th machine receives (but does not send) messages. The change in the topological structure is shown in Figure 6. Curves showing the changes in active output power during the process are shown in Figure 7. It is shown that when the 5th machine is still connected to the network, by stopping its outgoing messages, other machines can still work normally under the coordinated control. The only loss is that of the partial active power of the failed machine. Thus, the damage caused by the fault can be greatly reduced.
From the simulation results, it is shown that problems caused by a sudden failure can be partially solved by employing autonomous coordination control. Thus, the control strategy enhances the reliability of wind turbine groups and minimizes losses experienced by wind farms, which has an important application value for unattended offshore wind farms.
6. Conclusions
In this paper, a distributed coordination control mechanism has been proposed to solve the problems of wind turbine groups in offshore wind farms. In contrast to centralized control, distributed control provides stronger adaptability and flexibility, making it more suitable for unattended offshore wind farms. Based on the Hamiltonian energy theory, the single-machine model of a DFWT is expanded to a multi-machine model with network structure information. Subsequently, a distributed coordinated control mechanism is designed for managing the system under normal and failure conditions. Finally, the simulations prove the effectiveness of the proposed control method. However, the output synchronization of multiple wind turbines is only the primary control target for offshore wind turbine groups. More complex distributed control problems, such as the leader–follower control and the complementary control, need to be further investigated. In addition, the distributed coordinated control proposed in this paper can only solve the control problem of wind turbine groups in the constant power stage. When the offshore wind turbine cluster works in the maximum power tracking stage, new distributed control strategies need to be studied.
Acknowledgments
This work was supported by the Zhejiang Open Foundation of the Most Important Subjects.
Author Contributions
Bing Wang contributed to the design, analysis, and writing of this paper. Qiuxuan Wu contributed by giving some suggestions and consultation. Min Tian and Qingyi Hu analyzed the data and performed the computer simulations.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Bianchi, F.D.; Battista, H.D.; Mantz, R.J. Wind Turbine Control Systems: Principles, Modelling and Gain Scheduling Design; Springer: London, UK, 2006. [Google Scholar]
- Liu, T.Y.; Tavner, P.J.; Feng, Y.; Qiu, Y.N. Review of recent offshore wind power development in China. Wind Energy 2013, 16, 786–803. [Google Scholar] [CrossRef]
- Orlando, N.A.; Liserre, M.; Mastromauro, R.A.; Dell’Aquila, A. A survey of control issues in PMSG-based small wind-turbine systems. IEEE Trans. Ind. Inform. 2013, 9, 1211–1221. [Google Scholar] [CrossRef]
- Fragoso, S.; Garrido, J.; Vazquez, F.; Morilla, F. Comparative analysis of decoupling control methodologies and H∞ multivariable robust control for variable-speed, variable-pitch wind turbines: Application to a lab-scale wind turbine. Sustainability 2017, 9, 713. [Google Scholar] [CrossRef]
- Wei, M.; Chen, Z. Fast control strategy for stabilising fixed-speed induction-generator-based wind turbines in an islanded distributed system. IET Renew. Power Gener. 2013, 7, 144–162. [Google Scholar] [CrossRef]
- Xu, Y.; Zhang, W.; Liu, W.; Wang, X.; Ferrese, F.; Zang, C.; Yu, H. Distributed subgradient-based coordination of multiple renewable generators in a microgrid. IEEE Trans. Power Syst. 2014, 29, 23–32. [Google Scholar] [CrossRef]
- Prieto-Araujo, E.; Junyent-Ferre, A.; Lavernia-Ferrer, D.; Gomis-Bellmunt, O. Decentralized control of a nine-phase permanent magnet generator for offshore wind turbines. IEEE Trans. Energy Convers. 2015, 30, 1103–1112. [Google Scholar] [CrossRef]
- Bakka, T.; Karimi, H.R.; Christiansen, S. Linear parameter-varying modelling and control of an offshore wind turbine with constrained information. IET Control Theory Appl. 2014, 8, 22–29. [Google Scholar] [CrossRef]
- Shiau, T.; Chuen-Yu, J. Developing an indicator system for measuring the social sustainability of offshore wind power farms. Sustainability 2016, 8, 470. [Google Scholar] [CrossRef]
- He, S.B.; Chen, J.M.; Yau, D.K.Y.; Sun, Y.X. Cross-layer optimization of correlated data gathering in wireless sensor networks. IEEE Trans. Mob. Comput. 2012, 11, 1678–1691. [Google Scholar] [CrossRef]
- Zou, A.M.; Kumar, K.D. Distributed attitude coordination control for spacecraft formation flying. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 1329–1346. [Google Scholar] [CrossRef]
- Fang, H.J.; Wu, Z.H.; Wei, J. Improvement for consensus performance of multi-agent systems based on weighted average prediction. IEEE Trans. Autom. Control 2012, 57, 249–254. [Google Scholar] [CrossRef]
- Liu, C.; Duan, Z.S.; Chen, G.R.; Huang, L. L2 norm performance index of synchronization and LQR control synthesis of complex networks. Automatica 2009, 45, 1879–1885. [Google Scholar] [CrossRef]
- Van der Schaft, A.J. L2-Gain and Passivity Techniques in Nonlinear Control; Springer: Berlin, Germany, 1999. [Google Scholar]
- Shi, F.; Wang, J. Stabilising control of multi-machine power systems with transmission losses based on pseudo-generalised Hamiltonian theory. IET Control Theory Appl. 2013, 6, 173–181. [Google Scholar] [CrossRef]
- Wu, F.; Zhang, X.P.; Ju, P.; Sterling, M.J.H. Decentralized nonlinear control of wind turbine with doubly fed induction generator. IEEE Trans. Power Syst. 2008, 23, 613–621. [Google Scholar]
- Wang, B.; Qian, Y.P.; Zhang, Y.M. Robust nonlinear control of wind turbine with DFIG by using Hamiltonian energy approach. J. Control Theory Appl. 2013, 11, 123–128. [Google Scholar] [CrossRef]
- Godsil, C.; Royle, G. Algebraic Graph Theory; Springer: New York, NY, USA, 2001. [Google Scholar]
- Chopra, N. Output synchronization on strongly connected graphs. IEEE Trans. Autom. Control 2012, 57, 2896–2901. [Google Scholar] [CrossRef]
- Li, C.S.; Wang, Y.Z. Protocol design for output consensus of port-controlled Hamiltonian multi-agent systems. Acta Autom. Sin. 2014, 40, 415–422. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
Figure 1.
Network structure of an offshore wind farm.
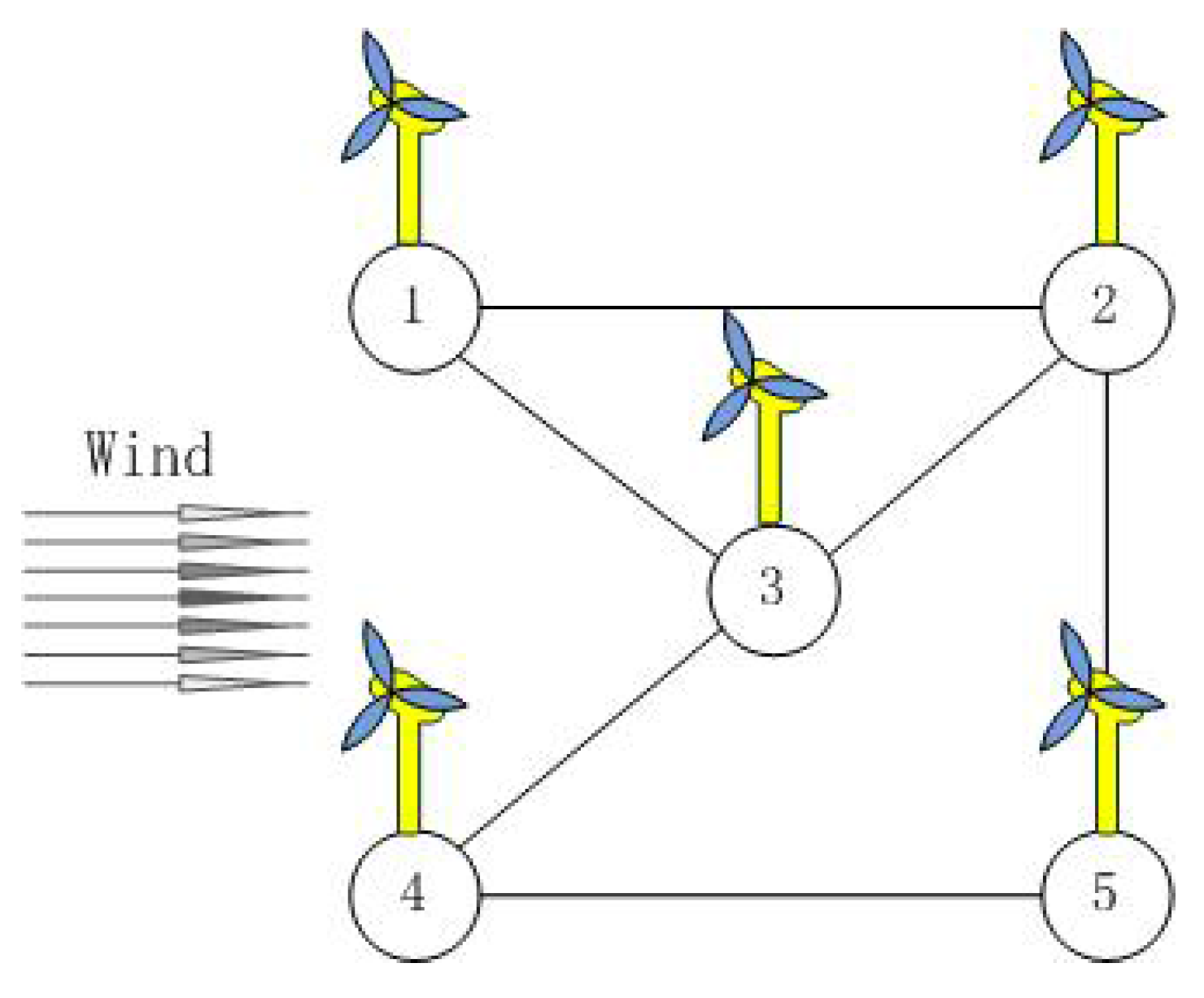
Figure 2.
The block diagram of the control structure. (a) the coordination control of five wind turbines; (b) the pre-feedback control of doubly fed wind turbine.
Figure 2.
The block diagram of the control structure. (a) the coordination control of five wind turbines; (b) the pre-feedback control of doubly fed wind turbine.
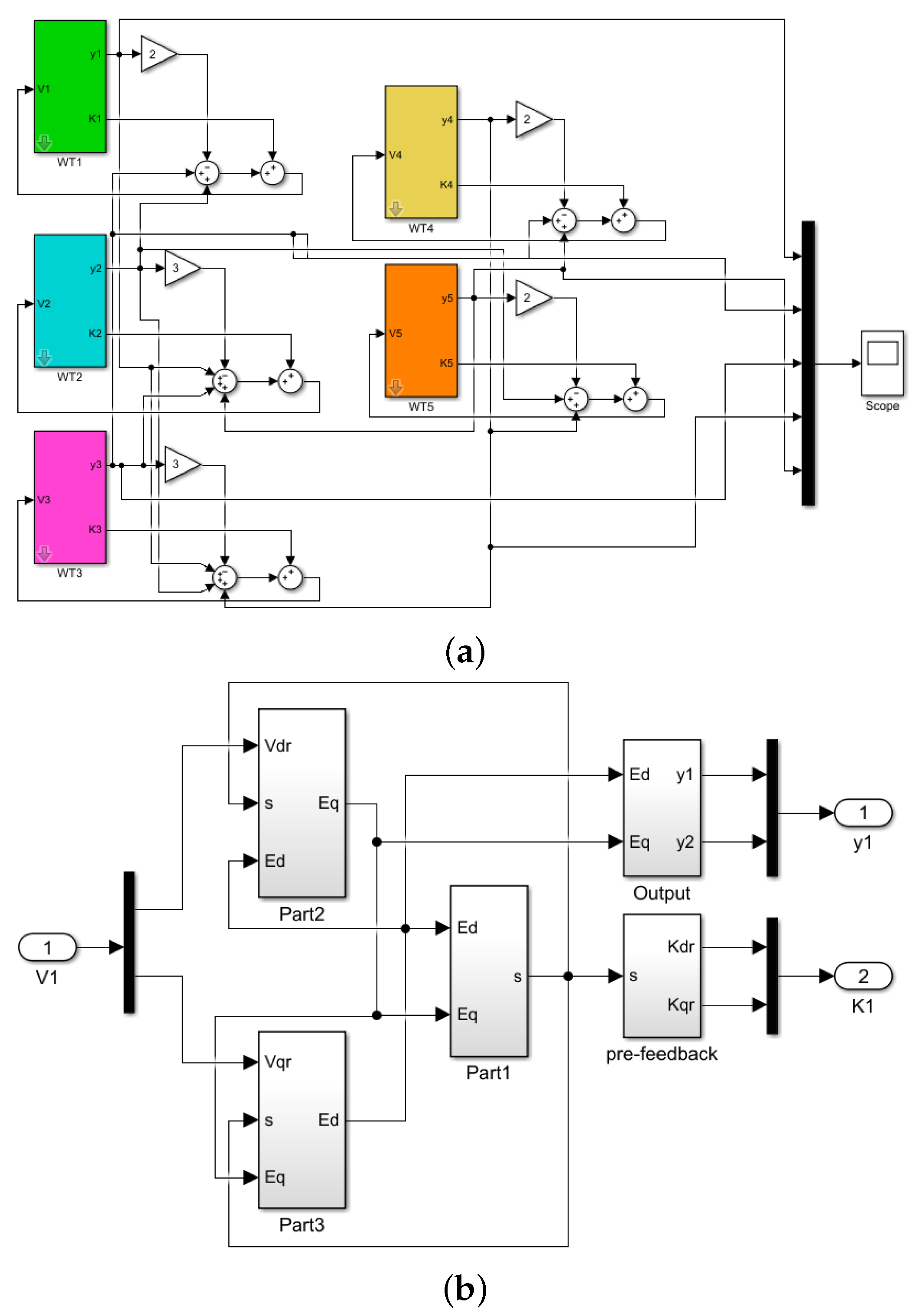
Figure 3.
Corresponding curves of the active output power before failure.

Figure 4.
Change in the topological structure in Case 1.
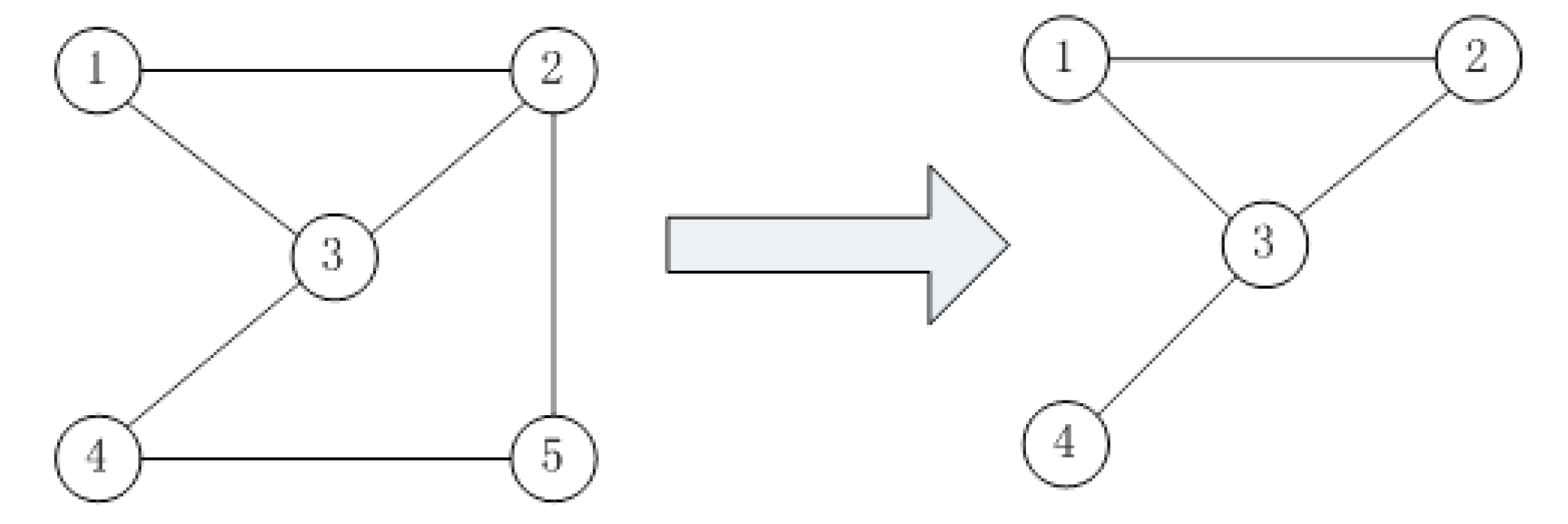
Figure 5.
Corresponding curves of the active output power in Case 1.
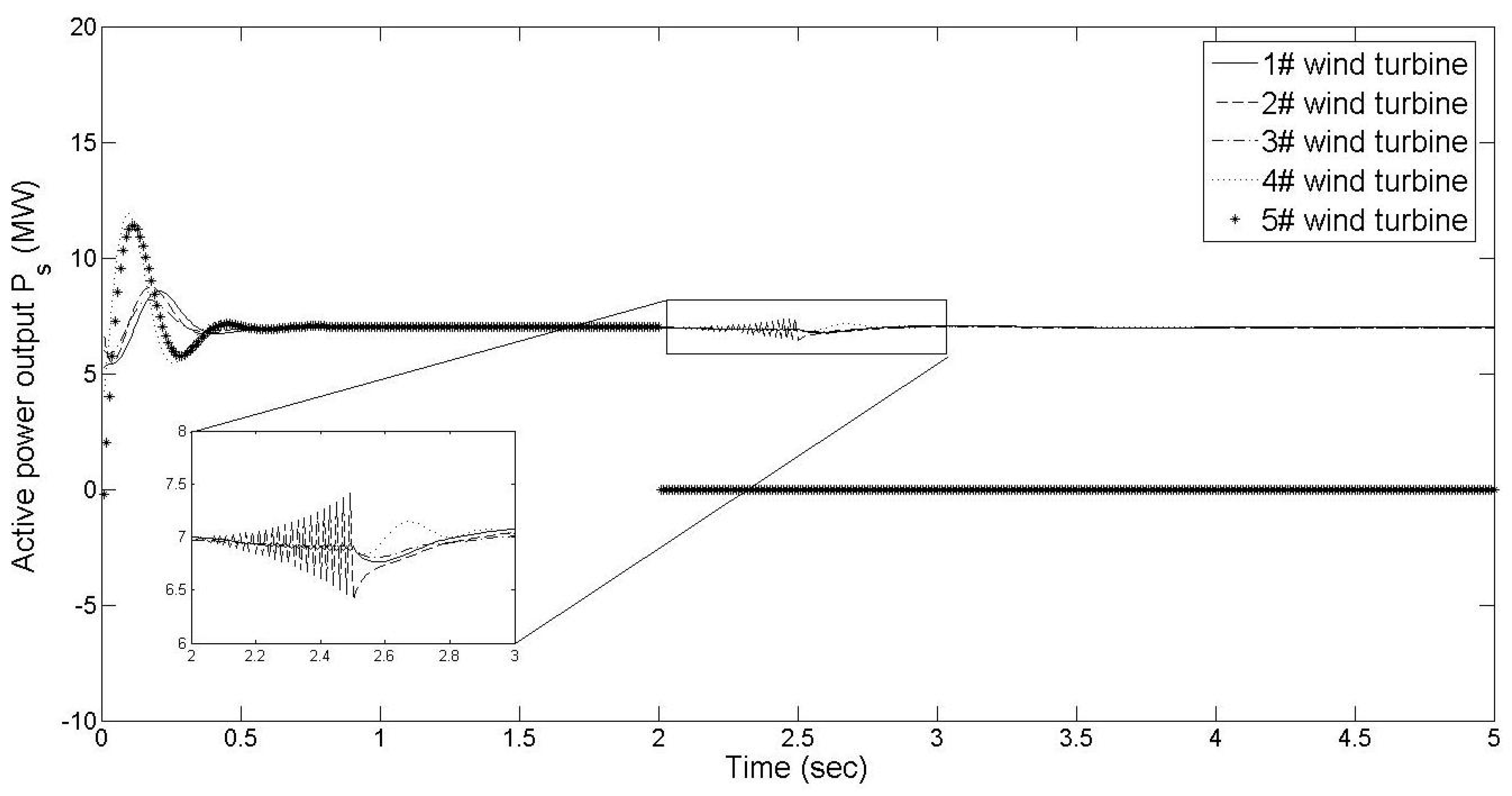
Figure 6.
Change in the topological structure in Case 2.
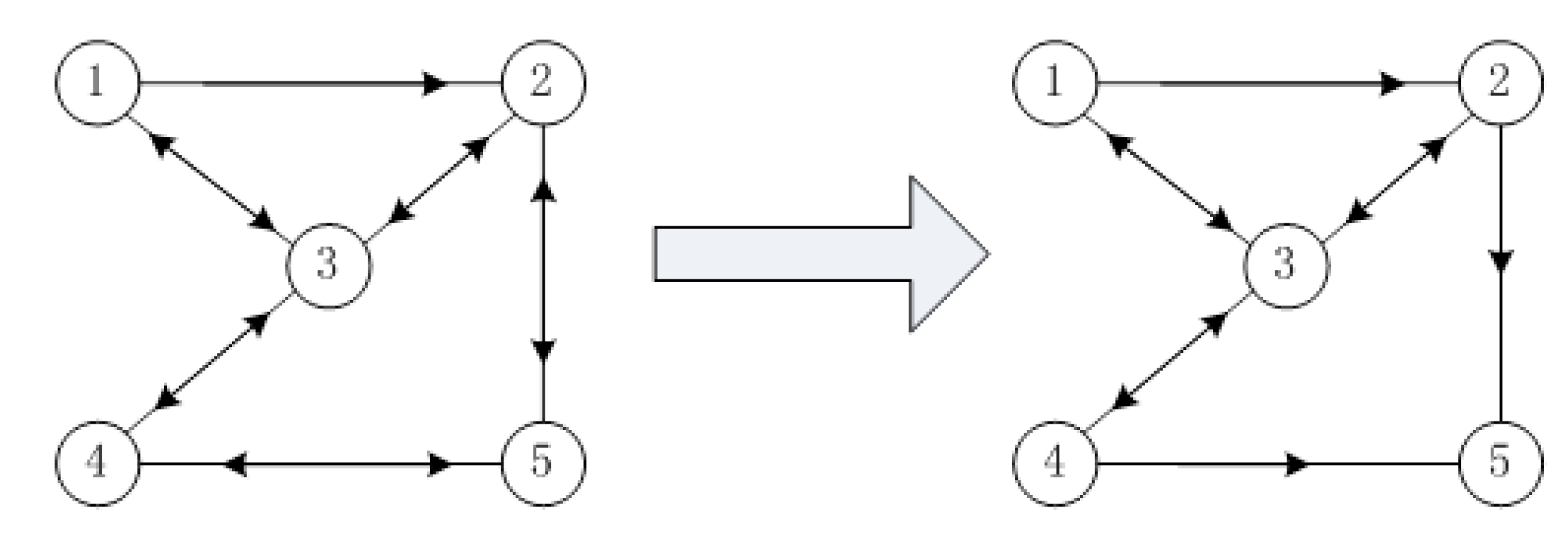
Figure 7.
Corresponding curves of the active output power in Case 2.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Key parameters of doubly fed wind turbines.
| Parameters | #1 DFWT | #2 DFWT | #3 DFWT | #4 DFWT | #5 DFWT |
|---|---|---|---|---|---|
| 3 s | 5 s | 4 s | 6 s | 6 s | |
| 2.9 pu | 3.1 pu | 2.5 pu | 3.2 pu | 3.3 pu | |
| 0.171 pu | 0.159 pu | 0.181 pu | 0.165 pu | 0.170 pu | |
| 0.156 pu | 0.149 pu | 0.167 pu | 0.164 pu | 0.163 pu | |
| 0.005 pu | 0.008 pu | 0.007 pu | 0.006 pu | 0.006 pu | |
| 1.8 pu | 1.4 pu | 0.8 pu | 1.6 pu | 1.7 pu | |
| 1.6 pu | 1.8 pu | 1.5 pu | 2.0 pu | 1.9 pu |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Wang, B.; Wu, Q.; Tian, M.; Hu, Q. Distributed Coordinated Control of Offshore Doubly Fed Wind Turbine Groups Based on the Hamiltonian Energy Method. Sustainability 2017, 9, 1448. https://doi.org/10.3390/su9081448
AMA Style
Wang B, Wu Q, Tian M, Hu Q. Distributed Coordinated Control of Offshore Doubly Fed Wind Turbine Groups Based on the Hamiltonian Energy Method. Sustainability. 2017; 9(8):1448. https://doi.org/10.3390/su9081448
Chicago/Turabian StyleWang, Bing, Qiuxuan Wu, Min Tian, and Qingyi Hu. 2017. "Distributed Coordinated Control of Offshore Doubly Fed Wind Turbine Groups Based on the Hamiltonian Energy Method" Sustainability 9, no. 8: 1448. https://doi.org/10.3390/su9081448
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.