
Autonomous Vehicles Perception, Acceptance, and Future Prospects in the GCC: An Analysis Using the UTAUT-Based Model


 , ,
, ,
Abstract
:1. Introduction
- Identified unique factors influencing AV adoption in the GCC, distinguishing it from global trends.
- Investigated socio-cultural attitudes towards AV technology specific to the GCC region.
- A comprehensive assessment of infrastructure and policy readiness for AVs in the GCC was conducted.
- Highlighted the need for customized approaches to foster AV adoption in regions with distinct characteristics like the GCC.
2. Related Work
3. Methodology
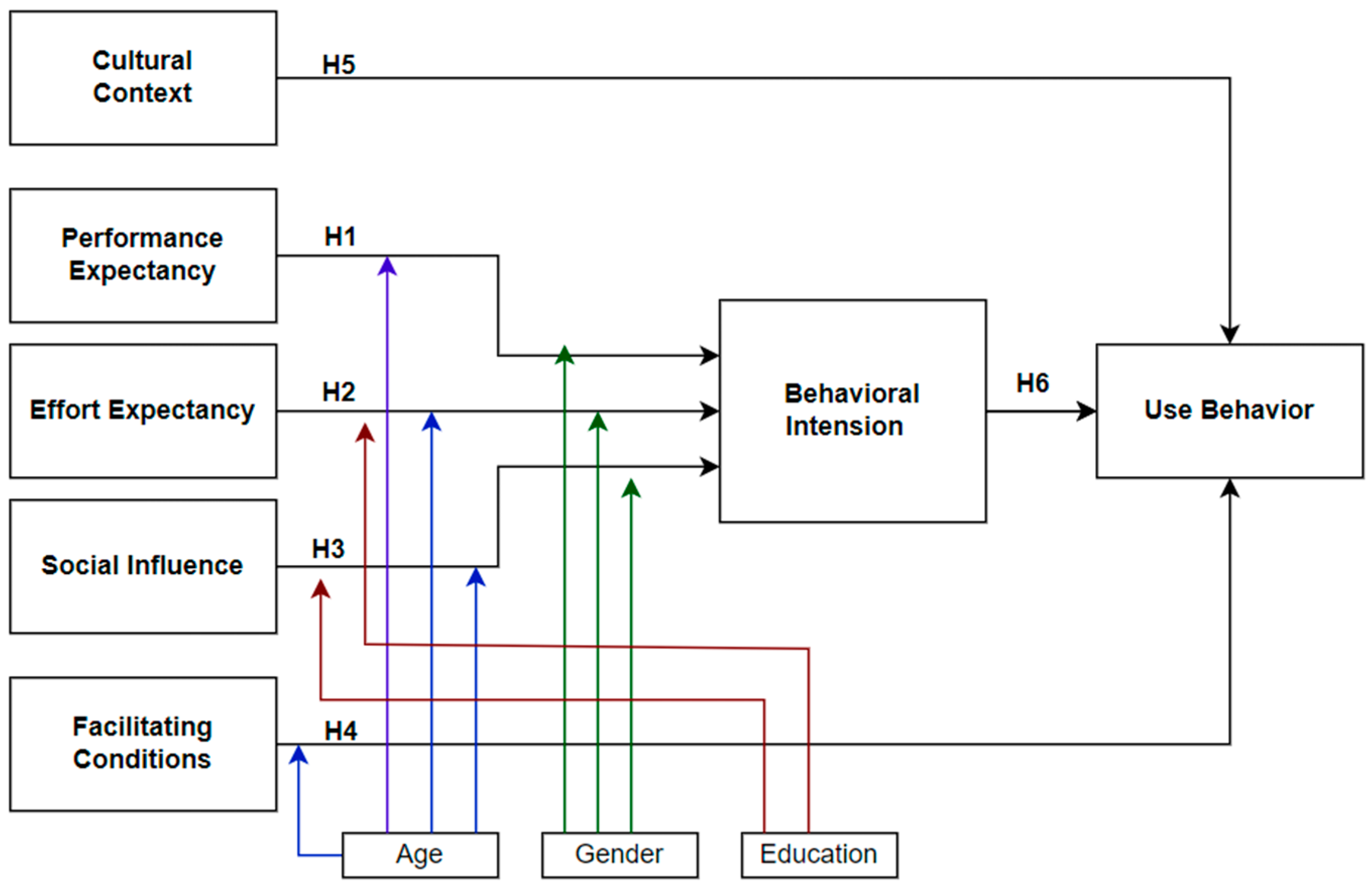
3.1. Theoretical Framework
3.2. Survey Creation
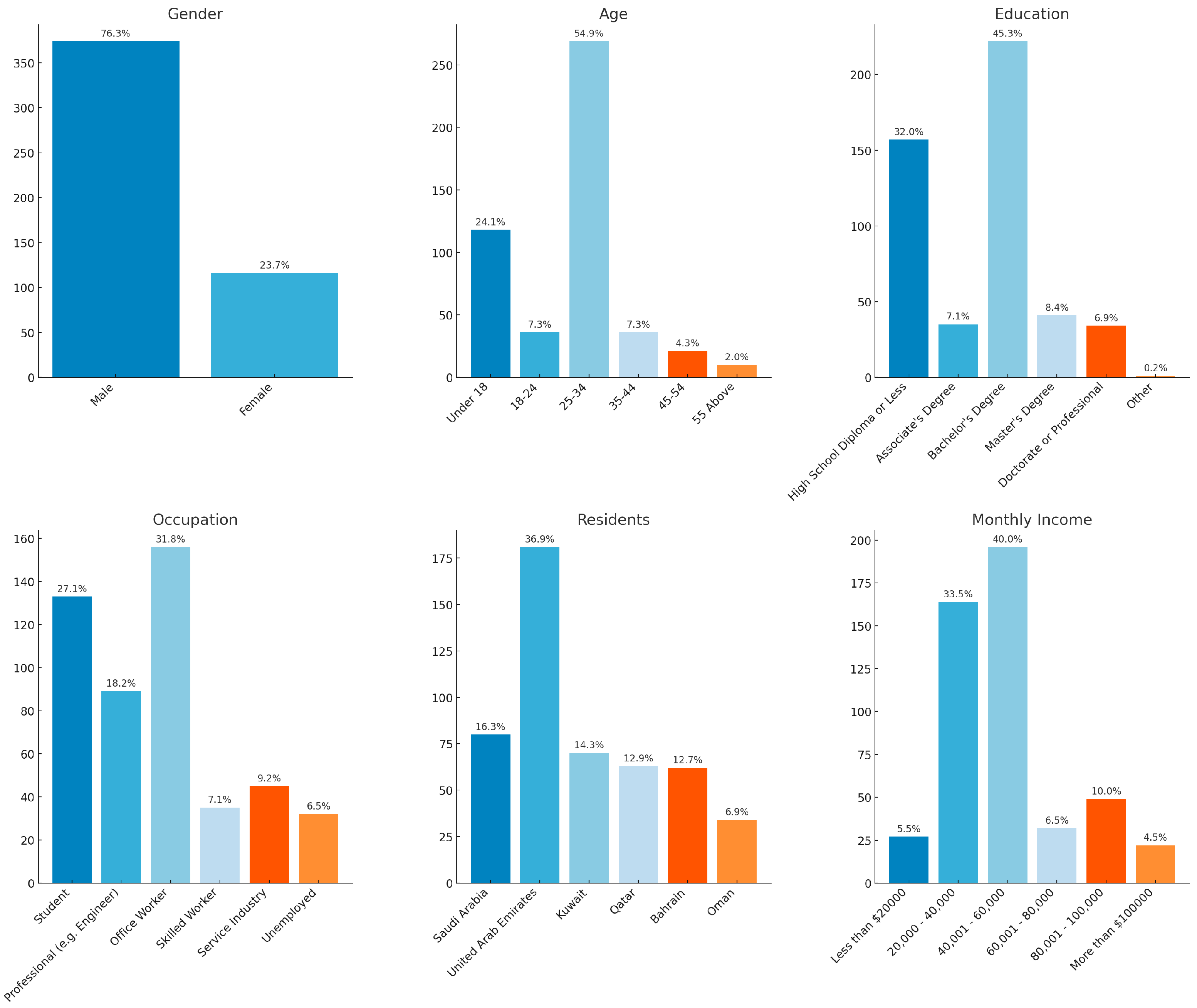
3.3. Participants Demographic Characteristics
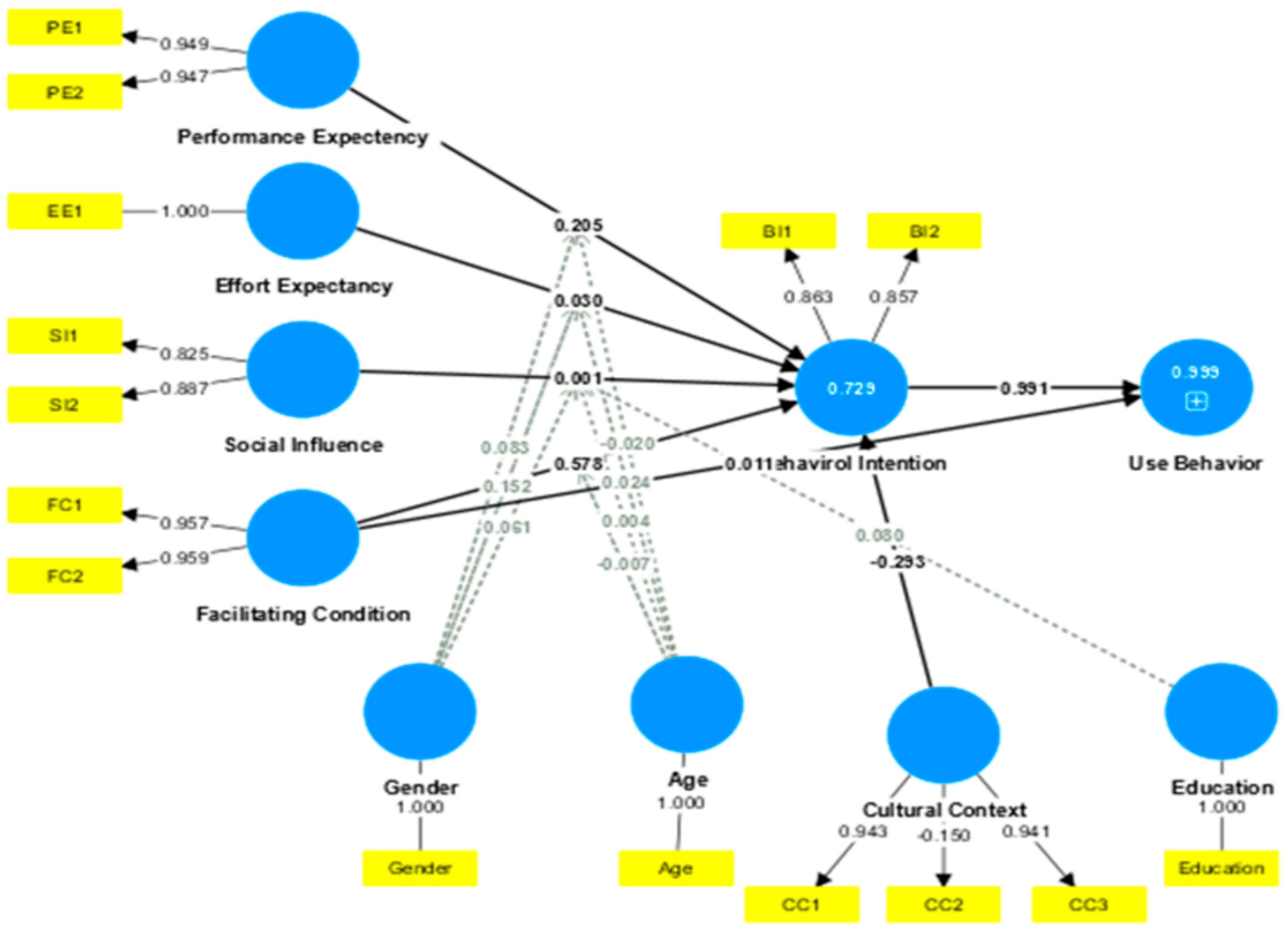
3.4. Measurement Model
4. Discussion
4.1. Demographic Dynamics in Self-Driving Car Adoption
4.2. Cultural Influence and Technological Trust
4.3. Perceptions of Benefits and Concerns
4.4. Barriers to Self-Driving Car Adoption
4.5. GCC Adoption Rates vs. Global Trends
5. Study Limitations and Prospective Research
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tengilimoglu, O.; Carsten, O.; Wadud, Z. Implications of automated vehicles for physical road environment: A comprehensive review. Transp. Res. Part E 2023, 169, 1366–5545. [Google Scholar] [CrossRef]
- Yeong, D.J.; Velasco-hernandez, G.; Barry, J.; Walsh, J. Sensor and sensor fusion technology in autonomous vehicles: A review. Sensors 2021, 21, 2140. [Google Scholar] [CrossRef] [PubMed]
- Al-Abdallah, G.; Khair, N.; Elmarakby, R. The Impact of Social Networking Sites on Luxury Vehicles Purchase Decision Process in Gulf Cooperation Council Countries. J. Int. Consum. Mark. 2021, 33, 559–577. [Google Scholar] [CrossRef]
- Venkatesh, V.; Thong, J.Y.L.; Xu, X. Unified theory of acceptance and use of technology: A synthesis and the road ahead. J. Assoc. Inf. Syst. 2016, 17, 328–376. [Google Scholar] [CrossRef]
- Wiseman, Y. Autonomous Vehicles. In Encyclopedia of Information Science and Technology, 5th ed.; Igi Global: Hershey, PA, USA, 2020; pp. 1–11. [Google Scholar] [CrossRef]
- Mishra, S.A. Machine Learning in Autonomous Vehicles. Int. J. Adv. Res. Sci. Commun. Technol. 2023, 3, 210–218. [Google Scholar] [CrossRef]
- Vishnukumar, H.J.; Butting, B.; Muller, C.; Sax, E. Machine learning and deep neural network—Artificial intelligence core for lab and real-world test and validation for ADAS and autonomous vehicles: AI for efficient and quality test and validation. In Proceedings of the 2017 Intelligent Systems Conference, (IntelliSys), London, UK, 7–8 September 2017; pp. 714–721. [Google Scholar] [CrossRef]
- Tian, Y.; Wang, X. A Study on Psychological Determinants of Users’ Autonomous Vehicles Adoption from Anthropomorphism and UTAUT Perspectives. Front. Psychol. 2022, 13, 986800. [Google Scholar] [CrossRef] [PubMed]
- Sutarto, A.P.; Ansori, N.; Widyanti, A.; Trapsilawati, F.; Rifai, A.P.; Erlangga, R.; Woodman, R. Driving the Future: Using TAM and UTAUT to Understand Public Acceptance of Fully Autonomous Vehicles. In Proceedings of the 2023 10th International Conference on ICT for Smart Society (ICISS), Bandung, Indonesia, 6–7 September 2023. [Google Scholar] [CrossRef]
- Morrison, G.; Van Belle, J.P. Customer intentions towards autonomous vehicles in South Africa: An extended UTAUT model. In Proceedings of the 2020 10th International Conference on Cloud Computing, Data Science & Engineering (Confluence), Noida, India, 29–31 January 2020. [Google Scholar] [CrossRef]
- Bansal, P.; Kockelman, K.M. Forecasting Americans’ long-term adoption of connected and autonomous vehicle technologies. Transp. Res. Part A Policy Pract. 2017, 95, 49–63. [Google Scholar] [CrossRef]
- Webb, J. The future of transport: Literature review and overview. Econ. Anal. Policy 2019, 61, 1–6. [Google Scholar] [CrossRef]
- Wu, J.; Liao, H.; Wang, J.W. Analysis of consumer attitudes towards autonomous, connected, and electric vehicles: A survey in China. Res. Transp. Econ. 2020, 80, 100828. [Google Scholar] [CrossRef]
- Zmud, J.P.; Sener, I.N. Towards an Understanding of the Travel Behavior Impact of Autonomous Vehicles. Transp. Res. Procedia 2017, 25, 2500–2519. [Google Scholar] [CrossRef]
- Bennett, R.; Vijaygopal, R.; Kottasz, R. Willingness of people with mental health disabilities to travel in driverless vehicles. J. Transp. Health 2019, 12, 1–12. [Google Scholar] [CrossRef]
- Roche-Cerasi, I. Public acceptance of driverless shuttles in Norway. Transp. Res. Part F Traffic Psychol. Behav. 2019, 66, 162–183. [Google Scholar] [CrossRef]
- Ritchie, O.T.; Watson, D.G.; Griffiths, N.; Misyak, J.; Chater, N.; Xu, Z.; Mouzakitis, A. How should autonomous vehicles overtake other drivers? Transp. Res. Part F Traffic Psychol. Behav. 2019, 66, 406–418. [Google Scholar] [CrossRef]
- Anania, E.C.; Rice, S.; Walters, N.W.; Pierce, M.; Winter, S.R.; Milner, M.N. The effects of positive and negative information on consumers’ willingness to ride in a driverless vehicle. Transp. Policy 2018, 72, 218–224. [Google Scholar] [CrossRef]
- Wang, N.; Tang, L.; Pan, H. Effectiveness of policy incentives on electric vehicle acceptance in China: A discrete choice analysis. Transp. Res. Part A Policy Pract. 2017, 105, 210–218. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, K.; Min, H.; Wang, Z.; Zhao, X.; Liu, P. What drives people to accept automated vehicles? Findings from a field experiment. Transp. Res. Part C Emerg. Technol. 2018, 95, 320–334. [Google Scholar] [CrossRef]
- Kaur, K.; Rampersad, G. Trust in driverless cars: Investigating key factors influencing the adoption of driverless cars. J. Eng. Technol. Manag. 2018, 48, 87–96. [Google Scholar] [CrossRef]
- Hussain, Q.; Alhajyaseen, W.K.M.; Adnan, M.; Almallah, M.; Almukdad, A.; Alqaradawi, M. Autonomous vehicles between anticipation and apprehension: Investigations through safety and security perceptions. Transp. Policy 2021, 110, 440–451. [Google Scholar] [CrossRef]
- Al Barghuthi, N.B.; Said, H. Readiness, Safety, and Privacy on Adopting Autonomous Vehicle Technology: UAE Case Study. In Proceedings of the 2019 Sixth HCT Information Technology Trends (ITT), Ras Al Khaimah, United Arab Emirates, 20–21 November 2019. [Google Scholar] [CrossRef]
- Aldakkhelallah, A.; Alamri, A.S.; Georgiou, S.; Simic, M. Public Perception of the Introduction of Autonomous Vehicles. World Electr. Veh. J. 2023, 14, 345. [Google Scholar] [CrossRef]
- Toglaw, S.; Ottesen, A.; Nissi, Y. Autonomous Vehicles: A Value Proposition for Emerging Markets—The Case of Kuwait. Proceedings 2023, 85, 35. [Google Scholar] [CrossRef]
- Alsghan, I.; Gazder, U.; Assi, K.; Hakem, G.H.; Sulail, M.A.; Alsuhaibani, O.A. The Determinants of Consumer Acceptance of Autonomous Vehicles: A Case Study in Riyadh, Saudi Arabia. Int. J. Hum.–Comput. Interact. 2022, 38, 1375–1387. [Google Scholar] [CrossRef]
- Bösch, P.M.; Becker, F.; Becker, H.; Axhausen, K.W. Cost-based analysis of autonomous mobility services. Transp. Policy 2018, 64, 76–91. [Google Scholar] [CrossRef]
- Kettles, N.; Van Belle, J.P. Investigation into the antecedents of autonomous car acceptance using an enhanced UTAUT Model. In Proceedings of the 2019 International Conference on Advances in Big Data, Computing and Data Communication Systems (icABCD), Durban, South Africa, 5–6 August 2019. [Google Scholar] [CrossRef]
- Farzin, I.; Mamdoohi, A.R.; Ciari, F. Autonomous Vehicles Acceptance: A Perceived Risk Extension of Unified Theory of Acceptance and Use of Technology and Diffusion of Innovation, Evidence from Tehran, Iran. Int. J. Hum.–Comput. Interact. 2023, 39, 2663–2672. [Google Scholar] [CrossRef]
- Iranmanesh, M.; Ghobakhloo, M.; Foroughi, B.; Nilashi, M.; Yadegaridehkordi, E. Factors influencing attitude and intention to use autonomous vehicles in Vietnam: Findings from PLS-SEM and ANFIS. Inf. Technol. People 2023. [Google Scholar] [CrossRef]
- Saris, W.E.; Gallhofer, I.N. Design, Evaluation, and Analysis of Questionnaires for Survey Research; Wiley: Hoboken, NJ, USA, 2007. [Google Scholar] [CrossRef]
- Borelli, M. Design, Evaluation, and Analysis of Questionnaires for Survey Research. J. Workplace Learn. 2008, 20, 453–456. [Google Scholar] [CrossRef]
- Fornell, C.; Larcker, D.F. Structural Equation Models with Unobservable Variables and Measurement Error: Algebra and Statistics. J. Mark. Res. 1981, 18, 382–388. [Google Scholar] [CrossRef]
- Hair, J. Multivariate Data Analysis; Kennesaw State University: Kennesaw, GA, USA, 2009; Available online: https://digitalcommons.kennesaw.edu/facpubs/2925 (accessed on 20 December 2021).
- Fornell, C.; Larcker, D.F. Evaluating Structural Equation Models with Unobservable Variables and Measurement Error. J. Mark. Res. 1981, 18, 39–50. [Google Scholar] [CrossRef]
- Leguina, A. A primer on partial least squares structural equation modeling (PLS-SEM). Int. J. Res. Method Educ. 2015, 38, 220–221. [Google Scholar] [CrossRef]
- Hair, J.F.; Sarstedt, M.; Ringle, C.M.; Gudergan, S.P. Advanced Issues in Partial Least Squares Structural Equation Modeling (PLS-SEM); Sage Publications Inc.: Thousand Oaks, CA, USA, 2021; Volume 4. [Google Scholar]
- Wold, H. Model Construction and Evaluation When Theoretical Knowledge Is Scarce. Theory and Application of Partial Least Squares. Eval. Econom. Models 1980, 15, 101–115. [Google Scholar]
- Rezaei, A.; Cao, M.; Liu, Q.; De Vos, J. Synthesising the Existing Literature on the Market Acceptance of Autonomous Vehicles and the External Underlying Factors. J. Adv. Transp. 2023, 2023, 6065060. [Google Scholar] [CrossRef]
- Hu, L.T.; Bentler, P.M. Cutoff criteria for fit indexes in covariance structure analysis: Conventional criteria versus new alternatives. Struct Equ. Model. 1999, 6, 1–55. [Google Scholar] [CrossRef]
- Preacher, K.J.; Hayes, A.F. Asymptotic and resampling strategies for assessing and comparing indirect effects in multiple mediator models. Behav. Res. Methods 2008, 40, 879–891. [Google Scholar] [CrossRef]
- Sisiopiku, V.P.; Yang, W.; Mason, J.; McKinney, B.; Hwangbo, S.W.; Classen, S. Examining the Impact of Age and Gender on Drivers’ Perceptions Toward Autonomous Vehicles Before and after Autonomous Driving Simulator Exposure. Int. J. Transp. Dev. Integr. 2023, 7, 85–93. [Google Scholar] [CrossRef]
- Zefreh, M.M.; Edries, B.; Esztergár-Kiss, D.; Torok, A. Intention to use private autonomous vehicles in developed and developing countries: What are the differences among the influential factors, mediators, and moderators? Travel Behav. Soc. 2023, 32, 100592. [Google Scholar] [CrossRef]
- Schepis, D.; Purchase, S.; Olaru, D.; Smith, B.; Ellis, N. How governments influence autonomous vehicle (AV) innovation. Transp. Res. Part A Policy Pract. 2023, 178, 103874. [Google Scholar] [CrossRef]
- Chen, Y.; Shiwakoti, N.; Stasinopoulos, P.; Khan, S.K. State-of-the-Art of Factors Affecting the Adoption of Automated Vehicles. Sustainability 2022, 14, 6697. [Google Scholar] [CrossRef]
- Shahedi, A.; Dadashpour, I.; Rezaei, M. Barriers to the sustainable adoption of autonomous vehicles in developing countries: A multi-criteria decision-making approach. Heliyon 2023, 9, e15975. [Google Scholar] [CrossRef]
- Alhajyaseen, W.; Adnan, M.; Abuhejleh, A.; Onat, N.; Tarlochan, F. Travelers’ preferences regarding autonomous mobility in the State of Qatar. Pers. Ubiquitous Comput. 2021, 25, 141–149. [Google Scholar] [CrossRef]
- Duarte, F.; Ratti, C. The Impact of Autonomous Vehicles on Cities: A Review. J. Urban Technol. 2018, 25, 3–18. [Google Scholar] [CrossRef]
- Raj, A.; Kumar, J.A.; Bansal, P. A multicriteria decision making approach to study barriers to the adoption of autonomous vehicles. Transp. Res. Part A Policy Pract. 2020, 133, 122–137. [Google Scholar] [CrossRef]
- Sadaf, M.; Iqbal, Z.; Javed, A.R.; Saba, I.; Krichen, M.; Majeed, S.; Raza, A. Connected and Automated Vehicles: Infrastructure, Applications, Security, Critical Challenges, and Future Aspects. Technologies 2023, 11, 117. [Google Scholar] [CrossRef]
- Nastjuk, I.; Herrenkind, B.; Marrone, M.; Brendel, A.B.; Kolbe, L.M. What drives the acceptance of autonomous driving? An investigation of acceptance factors from an end-user’s perspective. Technol. Forecast. Soc. Change 2020, 161, 120319. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
| Abbreviation | Meaning |
|---|---|
| AVs | Autonomous Vehicles |
| GCC | Gulf Cooperation Council |
| UTAUT | Unified Theory of Acceptance and Use of Technology |
| SEM | Structural Equation Modeling |
| AVE | Average Variance Extracted |
| UAE | United Arab Emirates |
| AI | Artificial Intelligence |
| FAV | Fully Autonomous Vehicle |
| PE | Performance Expectancy |
| ADAS | Advanced Driver Assistance Systems |
| CR | Composite Reliability |
| EE | Effort Expectancy |
| SI | Social Influence |
| FC | Facilitating Conditions |
| BI | Behavioral Intention |
| HTMT | Heterotrait–Monotrait Ratio |
| GoF | Goodness of Fit Index |
| ANOVA | Analysis of Variance |
| Ref. | Modelling Approach | Variable | Strength | Limitation |
|---|---|---|---|---|
| Wang [13] | Consumer Survey Analysis | Financial cost, vehicle technology, data privacy, driver fatigue, charging station accessibility | Focuses on financial and technological aspects | Limited to consumer attitudes in China |
| Bosch et al. [27] | Analysis of Autonomous Mobility Service Costs | Cost efficiency, service models | Provides insights into the economic feasibility of autonomous services | May not fully address user experience or social impact |
| Sener [14] | Travel Behavior Impact Survey | Safety, distance, data privacy, willingness to pay, residential location, mode frequency | Offers a comprehensive view of user concerns and preferences | Limited to specific geographic areas and may not represent broader trends |
| Kottasz [15] | Regression Analysis for Mental Health Disability Impact | Prior knowledge of AV, age, income, gender, disability intensity, anxiety, control locus | Innovative focus on mentally disabled individuals | Does not consider factors like comfort level, in-car amenities |
| Roche-Cerasi [16] | Statistical Analysis of Public Transport Use | Familiarity with shuttles, usefulness, trust in automation, security concerns | Highlights safety and security as key adoption factors | Does not include demographic factors; limited to driverless shuttles |
| Griffiths [17] | Statistical Analysis of Driving Behavior | Gas, brake, steering, lane, speed | Includes physiological measurements | Video-based methodology may not reflect actual driving scenarios |
| Anania et al. [18] | Consumer Perception Analysis | Gender, nationality, type of information | Highlights the importance of information delivery | Limited to three main factors without inter-factor analysis |
| Pan [19] | Policy Incentive Choice Analysis | Purchase price, driving restrictions, bus lane access, parking fee exemption | Translates preferences into monetary values | Focuses only on Chinese consumers |
| Wang [20] | Advanced Structural Equation Modelling | Perceived usefulness, ease of use, safety, trust, behavioral intention | Uses a comprehensive model to predict user acceptance | Does not consider demographic factors or real driving experiences |
| Rampersad [21] | Factor Analysis for AV Adoption | Performance expectancy, reliability, security, privacy, trust | Includes a variety of adoption scenarios | Limited to a closed environment (university campus) |
| [22] | Structural Equation Modeling (SEM) | General safety, human errors, HDV–AV interactions, performance in harsh conditions, security, comfort level, travel time, congestion, operational costs | Comprehensive analysis of various factors influencing public perception of AVs; inclusion of diverse demographic variables | Comprehensive analysis of various factors influencing public perception of AVs; inclusion of diverse demographic variables |
| Al Barghuthi N [23] | Descriptive Statistics and Correlation Analysis | Examine the acceptance and perception of self-driving cars in the UAE | Detailed analysis of specific features and specifications influencing acceptance; inclusion of demographic factors | Detailed analysis of specific features and specifications influencing acceptance; inclusion of demographic factors |
| Aldakkhelallah [24] | Logistic Regression | Gender, age, education, prior knowledge, stakeholder group | Comprehensive analysis, large-scale survey | Focus on AVs, neglects EV acceptance, and interconnections |
| Toglaw [25] | Qualitative | AV automation levels, autonomous features, technology | Examines an emerging market, considers various values | Focuses solely on AVs, lacks quantitative data |
| Alsghan [26] | Various (e.g., ANN, Regression) | Personal characteristics, Trust, Comfort, Age, Technology, Safety, Benefits, Preferences | Capture complex relationships, High prediction accuracy, Statistical significance, Insights into attitudes | Data requirements, Overfitting, Linearity assumptions, Limited statistical rigor, Response bias |
| Demographic Category | Frequency | Percent | |
|---|---|---|---|
| Gender | Male | 374 | 76.3% |
| Female | 116 | 23.7% | |
| Age | Under 18 | 118 | 24.1% |
| 18–24 | 36 | 7.3% | |
| 25–34 | 269 | 54.9% | |
| 35–44 | 36 | 7.3% | |
| 45–54 | 21 | 4.3% | |
| 55 Above | 10 | 2.0% | |
| Education | High School Diploma or Less | 157 | 32.0% |
| Associate’s Degree | 35 | 7.1% | |
| Bachelor’s Degree | 222 | 45.3% | |
| Master’s Degree | 41 | 8.4% | |
| Doctorate or Professional | 34 | 6.9% | |
| Other | 1 | 0.2% | |
| Occupation | Student | 133 | 27.1% |
| Professional (e.g., Engineer) | 89 | 18.2% | |
| Office Worker | 156 | 31.8% | |
| Skilled Worker | 35 | 7.1% | |
| Service Industry | 45 | 9.2% | |
| Unemployed | 32 | 6.5% | |
| Residents | Saudi Arabia | 80 | 16.3% |
| United Arab Emirates | 181 | 36.9% | |
| Kuwait | 70 | 14.3% | |
| Qatar | 63 | 12.9% | |
| Bahrain | 62 | 12.7% | |
| Oman | 34 | 6.9% | |
| Monthly Income | Less than $20,000 | 27 | 5.5% |
| $20,000–$40,000 | 164 | 33.5% | |
| $40,001–$60,000 | 196 | 40.0% | |
| $60,001–$80,000 | 32 | 6.5% | |
| $80,001–$100,000 | 49 | 10.0% | |
| More than $100,000 | 22 | 4.5% |
| Construct | Cronbach’s Alpha | Composite Reliability (rho_a) | Composite Reliability (rho_c) | Average Variance Extracted (AVE) |
|---|---|---|---|---|
| Behavioral Intention | 0.88 | 0.90 | 0.91 | 0.65 |
| Cultural Context | 0.83 | 0.85 | 0.86 | 0.60 |
| Facilitating Condition | 0.92 | 0.93 | 0.94 | 0.75 |
| Performance Expectancy | 0.90 | 0.91 | 0.92 | 0.68 |
| Construct | Age | BI | CC | Edu | EE | FC | PE | SI | Use Beh | Gender |
|---|---|---|---|---|---|---|---|---|---|---|
| Age | 0.73 | 0.12 | 0.15 | 0.18 | 0.16 | 0.14 | 0.13 | 0.17 | 0.11 | 0.19 |
| Behavioral Intention | 0.12 | 0.81 | 0.20 | 0.22 | 0.24 | 0.21 | 0.23 | 0.25 | 0.28 | 0.16 |
| Cultural Context | 0.15 | 0.20 | 0.76 | 0.14 | 0.17 | 0.18 | 0.19 | 0.21 | 0.13 | 0.12 |
| Education | 0.18 | 0.22 | 0.14 | 0.80 | 0.20 | 0.17 | 0.16 | 0.15 | 0.18 | 0.22 |
| Effort Expectancy | 0.16 | 0.24 | 0.17 | 0.20 | 0.83 | 0.22 | 0.21 | 0.19 | 0.17 | 0.14 |
| Facilitating Condition | 0.14 | 0.21 | 0.18 | 0.17 | 0.22 | 0.85 | 0.26 | 0.23 | 0.20 | 0.15 |
| Performance Expectancy | 0.13 | 0.23 | 0.19 | 0.16 | 0.21 | 0.26 | 0.87 | 0.24 | 0.19 | 0.18 |
| Social Influence | 0.17 | 0.25 | 0.21 | 0.15 | 0.19 | 0.23 | 0.24 | 0.82 | 0.16 | 0.13 |
| Use Behavior | 0.11 | 0.28 | 0.13 | 0.18 | 0.17 | 0.20 | 0.19 | 0.16 | 0.84 | 0.11 |
| Gender | 0.19 | 0.16 | 0.12 | 0.22 | 0.14 | 0.15 | 0.18 | 0.13 | 0.11 | 0.86 |
| Age | BI | CC | EDU | EE | FC | PE | SI | BEH | GNR | |
|---|---|---|---|---|---|---|---|---|---|---|
| Age | 0.725 | 0.120 | 0.108 | 0.329 | 0.175 | 0.265 | 0.239 | 0.130 | 0.251 | 0.223 |
| BI1 | 0.157 | 0.874 | 0.143 | 0.188 | 0.174 | 0.112 | 0.105 | 0.117 | 0.208 | 0.358 |
| BI1 | 0.272 | 0.710 | 0.279 | 0.220 | 0.274 | 0.300 | 0.190 | 0.296 | 0.282 | 0.280 |
| BI2 | 0.106 | 0.855 | 0.258 | 0.164 | 0.371 | 0.395 | 0.306 | 0.302 | 0.386 | 0.318 |
| CC1 | 0.146 | 0.183 | 0.868 | 0.354 | 0.281 | 0.353 | 0.261 | 0.302 | 0.282 | 0.262 |
| CC2 | 0.112 | 0.159 | 0.728 | 0.378 | 0.357 | 0.225 | 0.273 | 0.171 | 0.167 | 0.387 |
| CC3 | 0.260 | 0.367 | 0.834 | 0.279 | 0.171 | 0.223 | 0.151 | 0.178 | 0.192 | 0.272 |
| EE1 | 0.207 | 0.129 | 0.278 | 0.144 | 0.852 | 0.281 | 0.349 | 0.298 | 0.128 | 0.240 |
| EDU | 0.364 | 0.383 | 0.113 | 0.713 | 0.102 | 0.158 | 0.176 | 0.190 | 0.262 | 0.360 |
| FC1 | 0.378 | 0.264 | 0.390 | 0.303 | 0.129 | 0.888 | 0.211 | 0.260 | 0.297 | 0.155 |
| FC2 | 0.372 | 0.311 | 0.300 | 0.236 | 0.198 | 0.776 | 0.347 | 0.374 | 0.107 | 0.136 |
| PE1 | 0.394 | 0.227 | 0.224 | 0.365 | 0.400 | 0.178 | 0.724 | 0.183 | 0.358 | 0.127 |
| PE2 | 0.353 | 0.151 | 0.255 | 0.394 | 0.314 | 0.209 | 0.788 | 0.197 | 0.157 | 0.194 |
| SI1 | 0.377 | 0.268 | 0.122 | 0.249 | 0.284 | 0.294 | 0.370 | 0.776 | 0.213 | 0.319 |
| SI2 | 0.333 | 0.250 | 0.320 | 0.230 | 0.221 | 0.190 | 0.102 | 0.777 | 0.144 | 0.332 |
| GNR | 0.105 | 0.215 | 0.360 | 0.243 | 0.247 | 0.153 | 0.274 | 0.288 | 0.366 | 0.700 |
| BI | CC | EDU | EE | FC | PE | SI | BEH | GNR | |
|---|---|---|---|---|---|---|---|---|---|
| Age | - | 0.232 | 0.616 | 0.260 | 0.208 | 0.227 | 0.515 | 0.254 | 0.800 |
| Behavioral Intention | 0.680 | - | 0.777 | 0.685 | 0.577 | 0.343 | 0.335 | 0.411 | 0.397 |
| Cultural Context | 0.131 | 0.455 | - | 0.775 | 0.486 | 0.268 | 0.251 | 0.526 | 0.596 |
| Education | 0.721 | 0.500 | 0.180 | - | 0.514 | 0.211 | 0.634 | 0.264 | 0.557 |
| Effort Expectancy | 0.740 | 0.519 | 0.735 | 0.330 | - | 0.376 | 0.543 | 0.769 | 0.533 |
| Facilitating Condition | 0.617 | 0.834 | 0.502 | 0.413 | 0.555 | - | 0.527 | 0.814 | 0.333 |
| Performance Expectancy | 0.732 | 0.285 | 0.127 | 0.533 | 0.233 | 0.259 | - | 0.778 | 0.472 |
| Social Influence | 0.662 | 0.346 | 0.430 | 0.212 | 0.102 | 0.530 | 0.793 | - | 0.287 |
| Use Behavior | 0.738 | 0.383 | 0.281 | 0.177 | 0.772 | 0.392 | 0.122 | 0.710 | - |
| Construct | AVE | R-Square |
|---|---|---|
| Behavioral Intention | 0.739 | 0.729 |
| Cultural Context | 0.599 | 0.610 |
| Facilitating Condition | 0.917 | 0.900 |
| Performance Expectancy | 0.898 | 0.870 |
| Social Influence | 0.734 | 0.750 |
| Original Sample (O) | Sample Mean (M) | Standard Deviation (STDEV) | T Statistics (|O/STDEV|) | |
|---|---|---|---|---|
| BI → Use Behavior | 0.977 | 0.977 | 0.005 | 212.098 |
| EE → BI | 0.030 | 0.035 | 0.037 | 2.5 |
| FC → BI | 0.578 | 0.577 | 0.035 | 16.498 |
| PE → BI | 0.205 | 0.205 | 0.036 | 5.556 |
| SI → BI | 0.001 | 0.013 | 0.046 | 2.01 |
| Education × SI → BI | 0.080 | 0.080 | 0.031 | 2.558 |
| Country | CFI | TLI | RMSEA | Chi-Square Statistic | p-Value |
|---|---|---|---|---|---|
| Saudi Arabia | 0.95 | 0.94 | 0.06 | 84.2 | 0.03 |
| United Arab Emirates | 0.96 | 0.95 | 0.05 | 78.1 | 0.02 |
| Kuwait | 0.94 | 0.93 | 0.07 | 90.5 | 0.04 |
| Qatar | 0.93 | 0.92 | 0.08 | 95.7 | 0.05 |
| Bahrain | 0.95 | 0.93 | 0.06 | 85.0 | 0.03 |
| Oman | 0.92 | 0.90 | 0.09 | 100.3 | 0.06 |
| Fold | CFI | TLI | RMSEA | Chi-Square Statistic | p-Value |
|---|---|---|---|---|---|
| 1 | 0.94 | 0.93 | 0.06 | 85.2 | 0.04 |
| 2 | 0.95 | 0.94 | 0.05 | 78.9 | 0.03 |
| 3 | 0.93 | 0.92 | 0.07 | 88.4 | 0.05 |
| 4 | 0.92 | 0.91 | 0.08 | 92.6 | 0.06 |
| 5 | 0.95 | 0.93 | 0.06 | 83.0 | 0.02 |
| Parameter | Posterior Mean | Standard Deviation (SD) | 95% Credible Interval |
|---|---|---|---|
| Performance Expectancy | 0.70 | 0.05 | [0.60, 0.80] |
| Effort Expectancy | 0.50 | 0.05 | [0.40, 0.60] |
| Social Influence | 0.55 | 0.04 | [0.47, 0.63] |
| Facilitating Conditions | 0.65 | 0.05 | [0.55, 0.75] |
| Age (moderating effect) | −0.10 | 0.02 | [−0.14, −0.06] |
| Gender (moderating effect) | 0.15 | 0.03 | [0.09, 0.21] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hafeez, F.; Mas’ud, A.A.; Al-Shammari, S.; Sheikh, U.U.; Alanazi, M.A.; Hamid, M.; Azhar, A. Autonomous Vehicles Perception, Acceptance, and Future Prospects in the GCC: An Analysis Using the UTAUT-Based Model. World Electr. Veh. J. 2024, 15, 186. https://doi.org/10.3390/wevj15050186
Hafeez F, Mas’ud AA, Al-Shammari S, Sheikh UU, Alanazi MA, Hamid M, Azhar A. Autonomous Vehicles Perception, Acceptance, and Future Prospects in the GCC: An Analysis Using the UTAUT-Based Model. World Electric Vehicle Journal. 2024; 15(5):186. https://doi.org/10.3390/wevj15050186
Chicago/Turabian StyleHafeez, Farrukh, Abdullahi Abubakar Mas’ud, Saud Al-Shammari, Usman Ullah Sheikh, Mubarak A. Alanazi, Muhammad Hamid, and Ameer Azhar. 2024. "Autonomous Vehicles Perception, Acceptance, and Future Prospects in the GCC: An Analysis Using the UTAUT-Based Model" World Electric Vehicle Journal 15, no. 5: 186. https://doi.org/10.3390/wevj15050186