Using Crowdsourced Indoor Geodata for the Creation of a Three-Dimensional Indoor Routing Web Application

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Work
3. Creating 3D Web Applications with XML3D
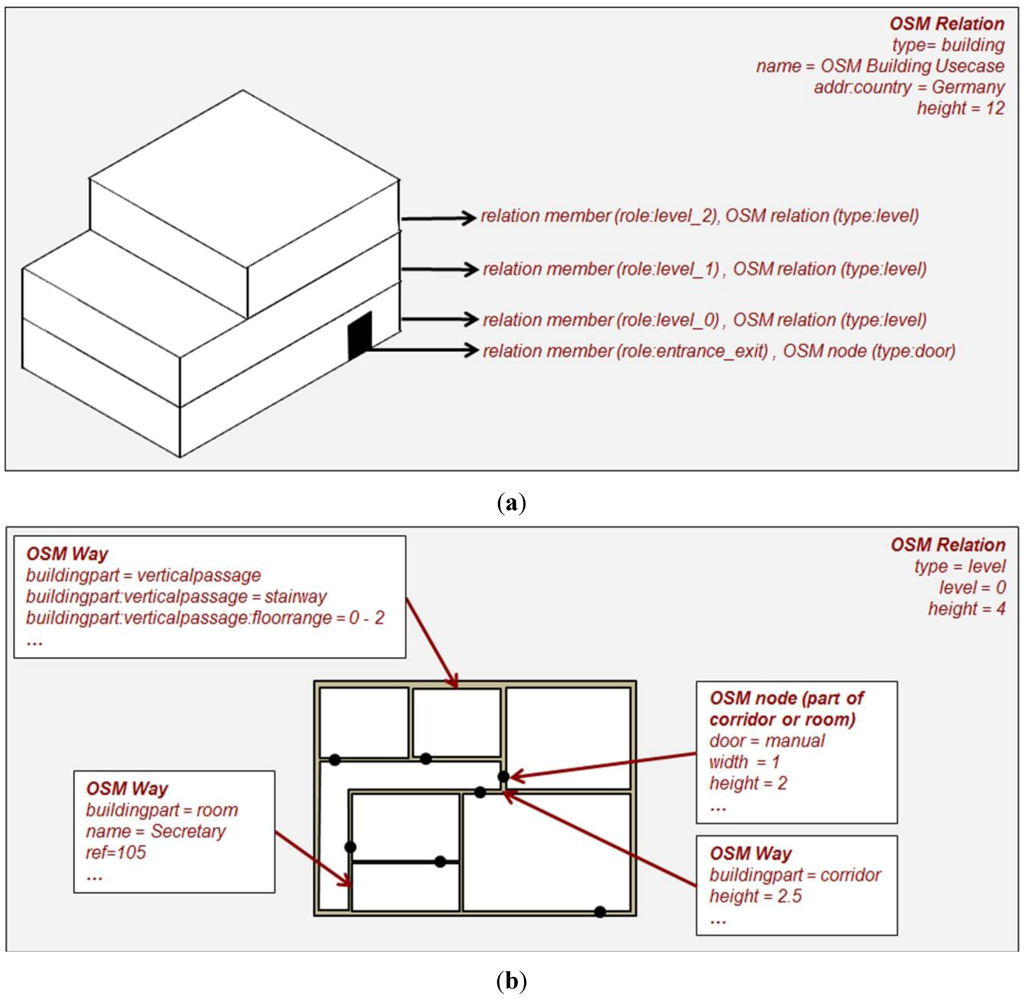
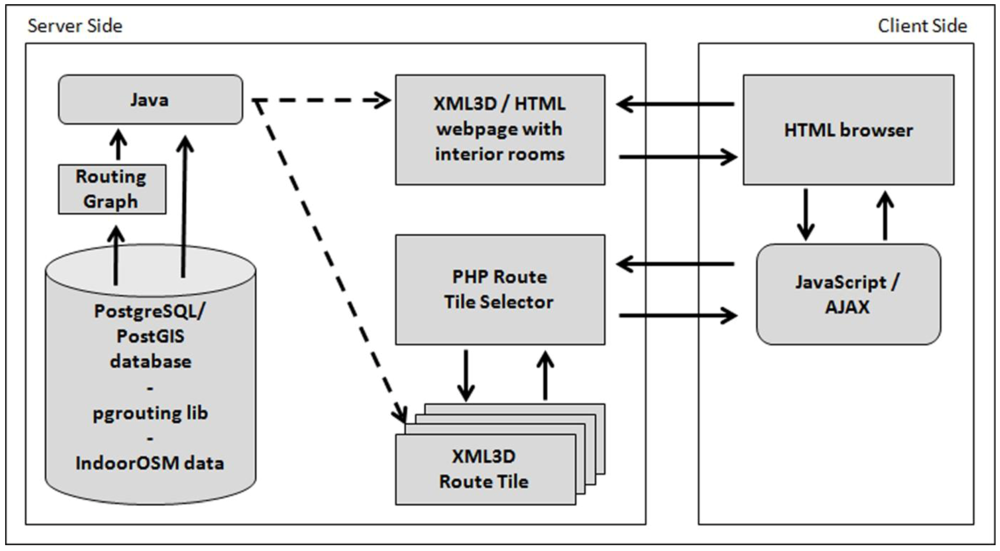
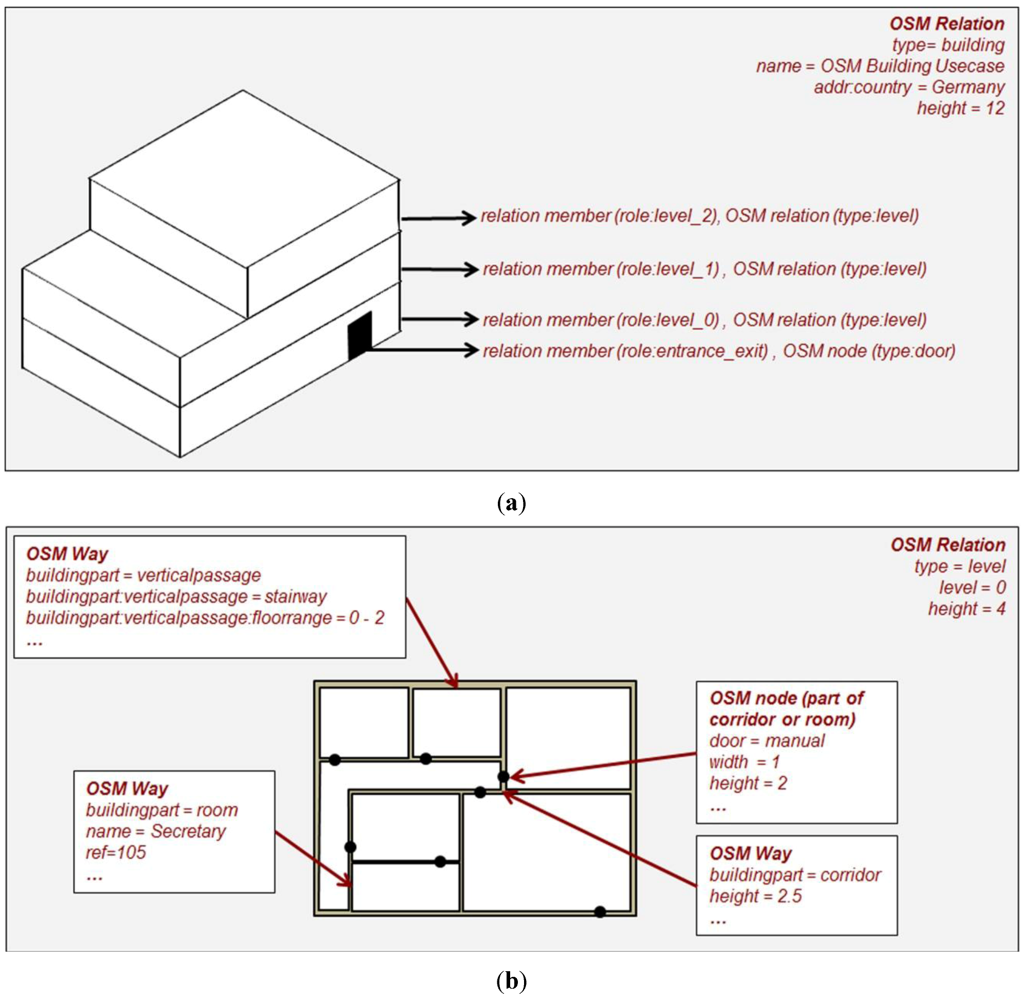
4. OSM as a Source for Crowdsourced (Indoor) Geodata
5. System Architecture for the Generation and Utilization of the 3D Indoor Routing Service

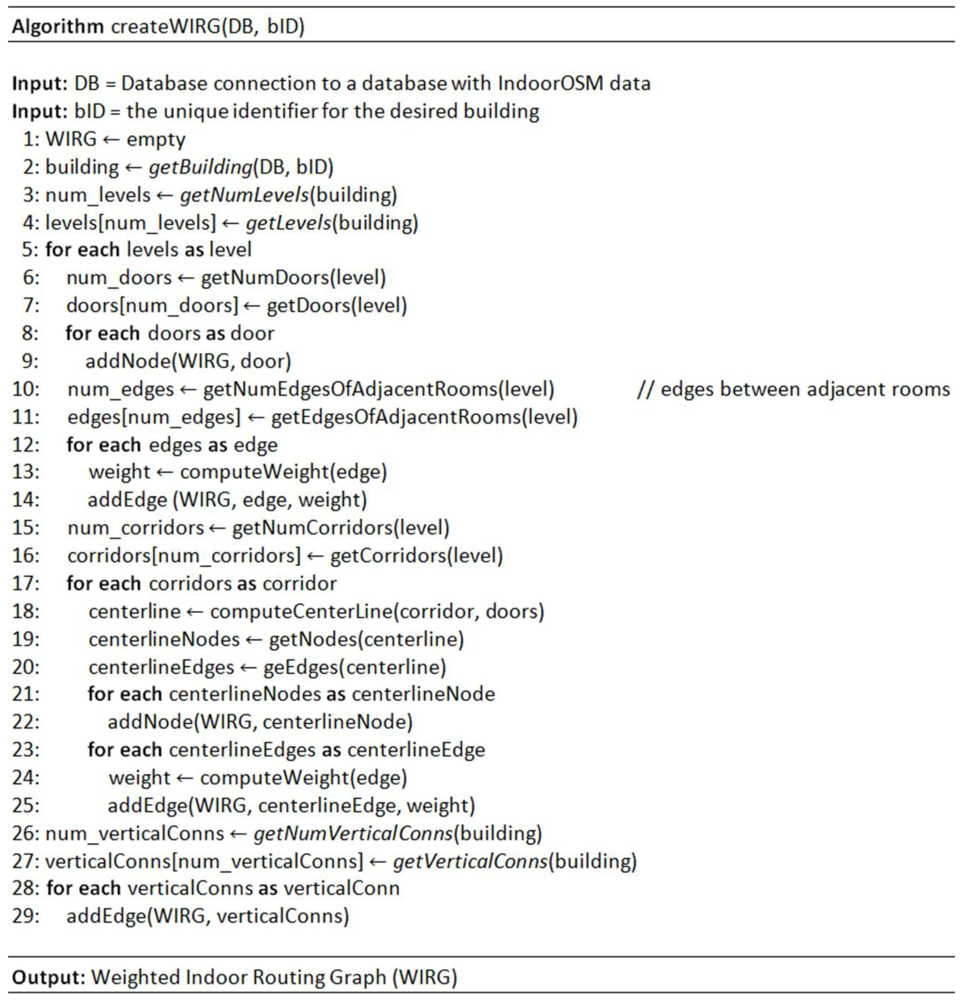
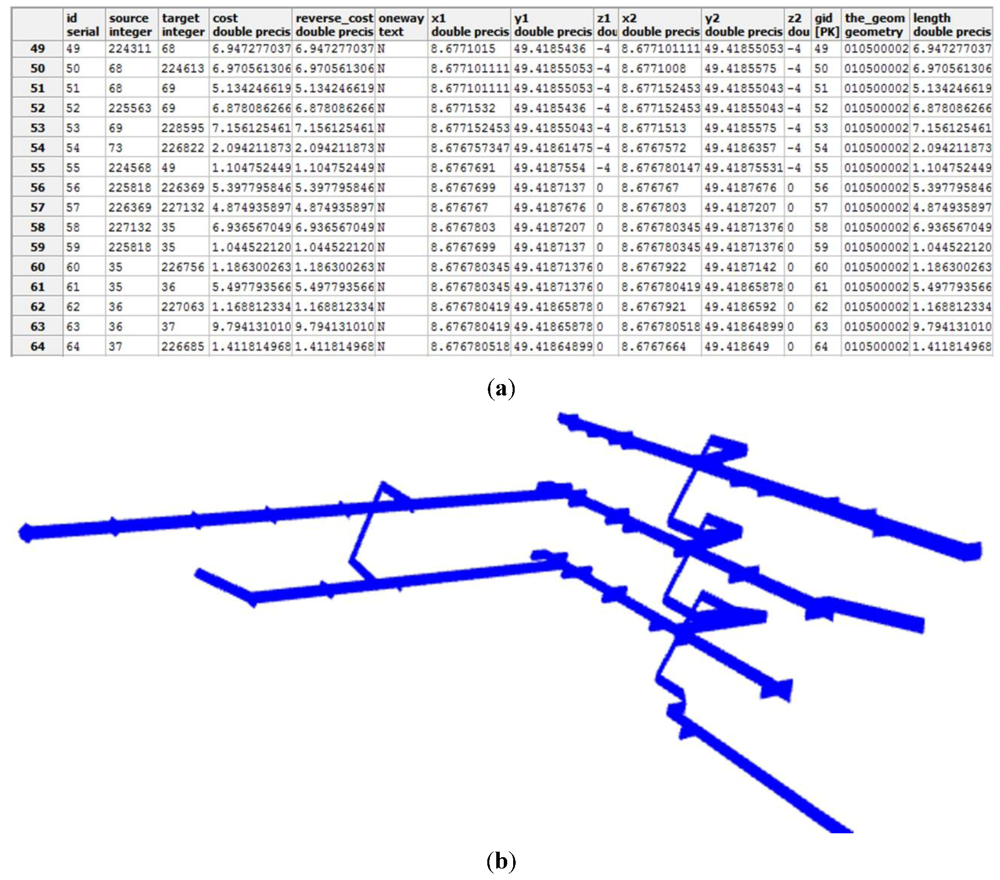
5.1. Generating the Routing Graph


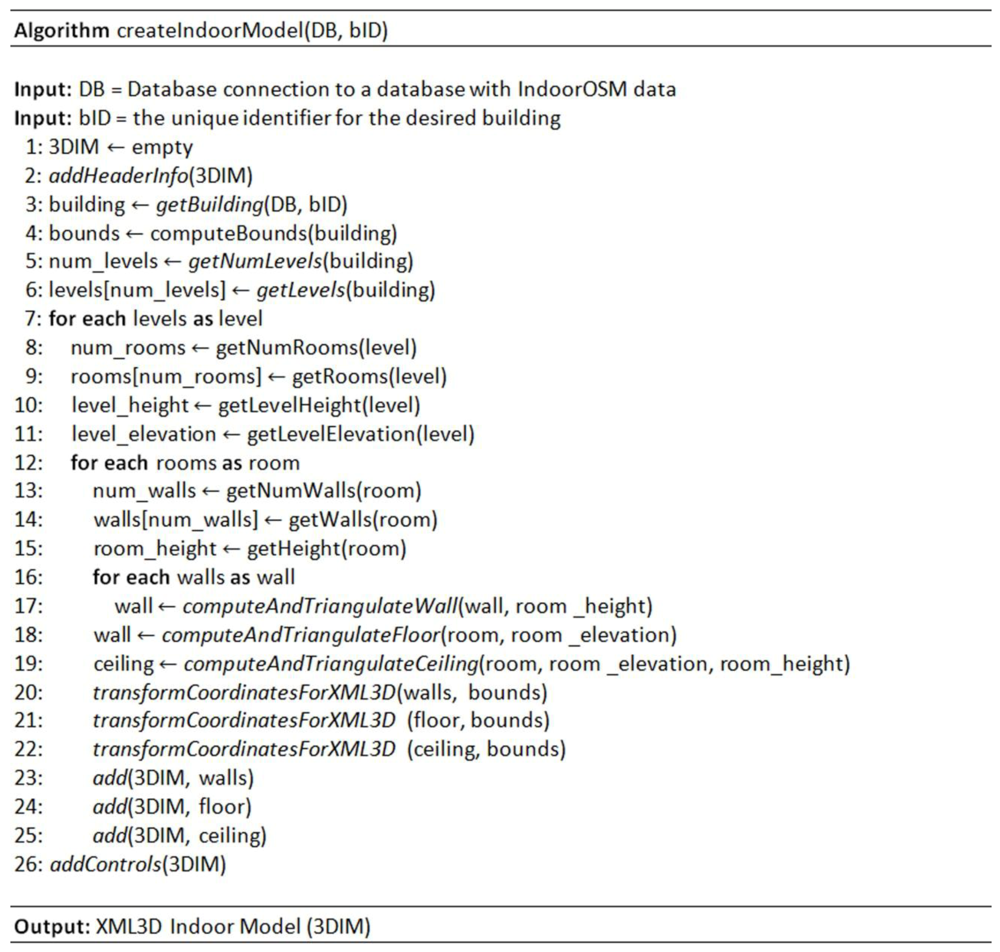
5.2. Automated Generation of an 3D Indoor Model for XML3D

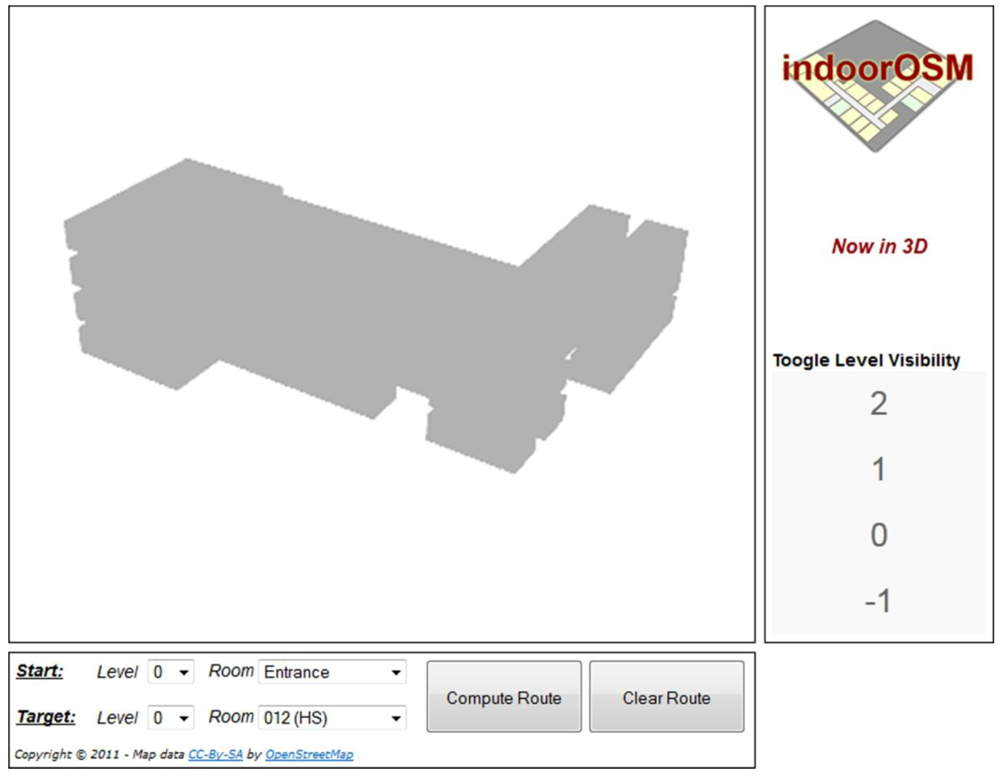
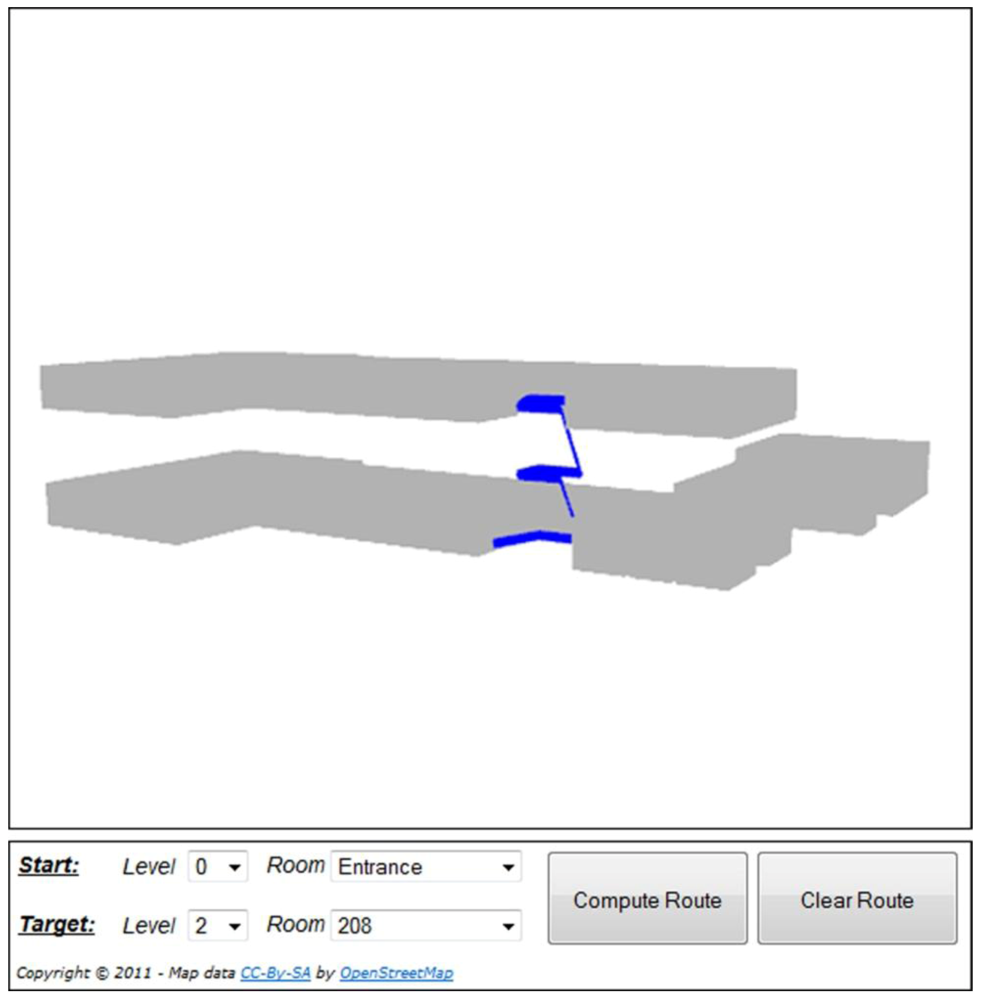
6. The XML3D-based Web Application


7. Conclusion and Future Work
Acknowledgments
References
- Goetz, M.; Zipf, A. Open Issues in Bringing 3D to Location Based Services (LBS): A Review Focusing on 3D Data Streaming and 3D Indoor Navigation. In Proceedings of the 5th 3D GeoInfo Conference, Berlin, Germany, 3-4 November 2010; pp. 121–124.
- Go indoors with Google Maps 6.0 for Android. Available online: http://googlemobile.blogspot.de/2011/11/go-indoors-with-google-maps-60-for.html (accessed on 31 March 2012).
- Bing Maps venue maps now feature nine largest US malls, 148 total. Available online: http://www.bing.com/community/site_blogs/b/maps/archive/2011/03/22/bing-maps-venue-maps-now-feature-largest-nine-us-malls-148-total.aspx (accessed on 31 March 2012).
- NAVTEQ Extends the Journey Beyond the ‘Front Door’. Available online: http://press.navteq.com/index.php?s=4260&item=30551 (accessed on 31 March 2012).
- Meijers, M.; Zlatanova, S.; Pfeifer, N. 3D Geo-Information Indoors: Structuring for Evacuation. In Proceedings of the 1st international ISPRS/EuroSDR/DGPF-Workshop on Next Generation 3D City Models (EuroSDRBonn), Bonn, Germany, 21-22 June 2005; p. 6.
- Coors, V.; Zipf, A. MoNa 3D—Mobile Navigation using 3D City Models. In Proceedings of the 4th International Symposium on LBS and Telecartography 2007, Hongkong, China, 8-10 November 2007; p. 10.
- Zlatanova, S. SII for Emergency Response: The 3D Challenges. In Proceedings of the XXI ISPRS CongressPart B4-TYC IV, Beijing, China, 3-11 July 2008; pp. 1631–1637.
- Havlik, D.; Schade, S.; Sabeur, Z.A.; Mazzetti, P.; Watson, K.; Berre, A.J.; Mon, J.L. From sensor to observation web with environmental enablers in the future internet. Sensors 2011, 11, 3874–3907. [Google Scholar]
- Goodchild, M.F. Citizens as voluntary sensors: Spatial data infrastructure in the world of web 2.0. Int. J. Spat. Data Infrastruct. Res. 2007, 2, 24–32. [Google Scholar]
- Zielstra, D.; Zipf, A. A Comparative Study of Proprietary Geodata and Volunteered Geographic Information for Germany. In Proceedings of the 13th AGILE International Conference on Geographic Information Science, Guimarães, Portugal, 10-14 May 2010; pp. 1–15.
- Haklay, M. How good is volunteered geographical information? A comparative study of OpenStreetMap and ordnance survey datasets. Environ. Plan. B Plan. Des. 2010, 37, 682–703. [Google Scholar] [CrossRef]
- Neis, P.; Zielstra, D.; Zipf, A. The street network evolution of crowdsourced maps: OpenStreetMap in Germany 2007-2011. Future Internet 2012, 4, 1–21. [Google Scholar]
- IndoorOSM. Available online: http://wiki.openstreetmap.org/wiki/IndoorOSM (accessed on 31 March 2012).
- Goetz, M.; Zipf, A. Extending OpenStreetMap to Indoor Environments: Bringing Volunteered Geographic Information to the Next Level. In Proceedings of the Urban and Regional Data Management: Udms Annual 2011, Delft, The Netherlands, 28-30 September 2011; pp. 47–58.
- Sons, K.; Klein, F.; Ruinstein, D.; Byelozyorov, S.; Slusallek, P. XML3D: Interactive 3D Graphics for the Web. In Proceedings of the 15th International Conference on Web 3D Technology, Los Angeles, CA, USA, 2010; pp. 175–184.
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 267–271. [Google Scholar]
- Abowd, G.D.; Atkeson, C.G.; Hong, J.; Long, S.; Kooper, R.; Pinkerton, M. Cyberguide: A mobile context-aware tour guide. Wirel. Netw. 1997, 3, 421–433. [Google Scholar] [CrossRef]
- Höllerer, T.; Feiner, S.; Terauchi, T.; Rashid, G.; Hallaway, D. Exploring MARS: Developing indoor and outdoor user interfaces to a mobile augmented reality system. Comput. Graph. 1999, 23, 779–785. [Google Scholar] [CrossRef]
- Gilliéron, P.-Y.; Bertrand, M. Personal Navigation System for Indoor Applications. In Proceedings of the 11th IAIN World Congress, Berlin, Germany, 21-24 October 2003; p. 15.
- Schmidt-Belz, B.; Hermann, F. User Validation of a Nomadic Exhibition Guide. In Proceedings of the Human Computer Interaction with Mobile Devices and Services (Mobile HCI 2004), Glasgow, UK, 13-16 September 2004; pp. 86–97.
- Pateli, A.G.; Giaglis, G.M.; Spinellis, D.D. Trial Evaluation of Wireless Info-communication and Indoor Location-based Services in Exhibition Shows. In Proceedings of the Advances in Informatics, Volas, Greece, 11-13 November 2005; pp. 199–210.
- Kargl, F.; Geßler, S.; Flerlage, F. The iNAV Indoor Navigation System. In Proceedings of the 4th International Symposium on Ubiquitous Computing Systems (UCS 2007), Tokyo, Japan, 25-28 November 2007; pp. 110–117.
- Hijazi, I.; Ehlers, M. Web 3D Routing in and between Buildings. In Proceedings of the Fourth National GIS Symposium, Al-Khobar, Saudi Arabia, 4-6 May 2009; pp. 11–21.
- Rehrl, K.; Göll, N.; Leitinger, S.; Bruntsch, S. Combined Indoor/Outdoor Smartphone Navigation for Public Transport Travellers. In Proceedings of the 3rd Symposium on LBS & TeleCartography 2005, Vienna, Austria, 28-30 November 2005; pp. 235–239.
- Thunderhead Explorer: Indoor Routing for UC2009 on iPhone. Available online: http://thunderheadxpler.blogspot.com/2009/07/indoor-routing-for-uc2009-on-iphone.html (accessed on 31 March 2012).
- Inoue, Y.; Ikeda, T.; Yamamoto, K.; Yamashita, T.; Sashima, A.; Kurumatani, K. Usability Study of Indoor Mobile Navigation System in Commercial Facilities. In Proceedings of the 2nd International Workshop on Ubiquitous Systems Evaluation (USE ’08), Seoul, Korea, 21 September 2008; pp. 1–6.
- Papataxiarhis, V.; Riga, V.; Nomikos, V.; Sekkas, O.; Kolomvatsos, K.; Tsetsos, V.; Papageorgas, P.; Vourakis, S.; Xouris, V.; Hadjiefthymiades, S.; Kouroupetroglou, G. MNISIKLIS: Indoor Location Based Services for All. In Location Based Services and TeleCartography: From Sensor Fusion to Ubiquitous LBS; Springer: Berlin, Germany, 2008; Volume 2, pp. 263–282. [Google Scholar]
- Karimi, H.A.; Ghafourian, M. Indoor routing for individuals with special needs and preferences. Trans. GIS 2010, 14, 299–329. [Google Scholar] [CrossRef]
- Lyardet, F.; Grimmer, J.; Muhlhauser, M. CoINS: Context Sensitive Indoor Navigation System. In Proceedings of the 8th IEEE International Symposium on Multimedia (ISM’06), San Diego, CA, USA, 11-13 December 2006; pp. 209–218.
- Lyardet, F.; Szeto, D.W.; Aitenbichler, E. Context-Aware Indoor Navigation. In Proceedings of the European Conference on Ambient Intelligence (AML 08), Nürnberg, Germany, 19-22 November 2008; pp. 290–307.
- XML3D-Based on W3C technologies. Available online: http://www.xml3d.org/features/ (accessed on 23 May 2012).
- XML3D 0.4 Specification. Available online: http://www.xml3d.org/xml3d/specification/current/ (accessed on 23 May 2012).
- Stats-OpenStreetMap Wiki. Available online: http://wiki.openstreetmap.org/wiki/Statistics (accessed on 31 March 2012).
- Watchlist. Available online: http://tagwatch.stoecker.eu/Planet-latest/En/watchlist.html (accessed on 31 March 2012).
- Tagwatch Planet-latest. Available online: http://tagwatch.stoecker.eu/Planet-latest/En/tags.html (accessed on 31 March 2012).
- OpenStreetMap Wiki. Available online: http://wiki.openstreetmap.org/ (accessed on 3 May 2012).
- indoorOSM-Mapping the Indoor World. Available online: http://indoorosm.uni-hd.de/ (accessed on 10 May 2012).
- Download OpenStreetMap Extracts. Available online: http://download.geofabrik.de/osm/ (accessed on 2 May 2012).
- Osmosis-OpenStreetMap Wiki. Available online: http://wiki.openstreetmap.org/wiki/Osmosis (accessed on 2 May 2012).
- Goetz, M.; Zipf, A. Formal definition of a user-adaptive and length-optimal routing graph for complex indoor environments. Geo-Spat. Inf. Sci. 2011, 14, 119–128. [Google Scholar] [CrossRef]
© 2012 by the authors; licensee MDPI, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Goetz, M. Using Crowdsourced Indoor Geodata for the Creation of a Three-Dimensional Indoor Routing Web Application. Future Internet 2012, 4, 575-591. https://doi.org/10.3390/fi4020575
Goetz M. Using Crowdsourced Indoor Geodata for the Creation of a Three-Dimensional Indoor Routing Web Application. Future Internet. 2012; 4(2):575-591. https://doi.org/10.3390/fi4020575
Chicago/Turabian StyleGoetz, Marcus. 2012. "Using Crowdsourced Indoor Geodata for the Creation of a Three-Dimensional Indoor Routing Web Application" Future Internet 4, no. 2: 575-591. https://doi.org/10.3390/fi4020575
APA StyleGoetz, M. (2012). Using Crowdsourced Indoor Geodata for the Creation of a Three-Dimensional Indoor Routing Web Application. Future Internet, 4(2), 575-591. https://doi.org/10.3390/fi4020575