Small Drones for Community-Based Forest Monitoring: An Assessment of Their Feasibility and Potential in Tropical Areas

 ,
, 

Abstract
:1. Introduction
2. The Use of Small Drones for Environmental Mapping and Monitoring
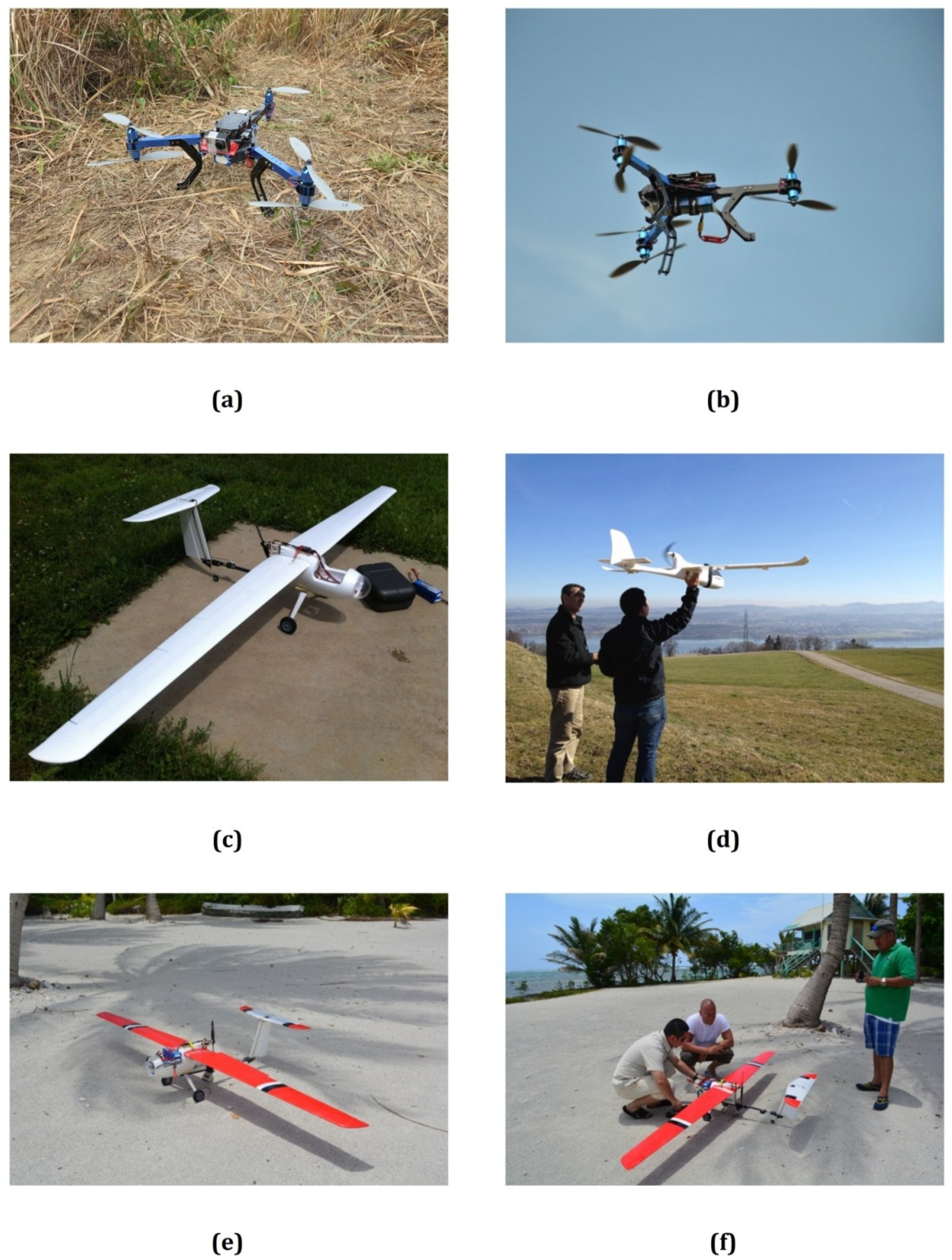
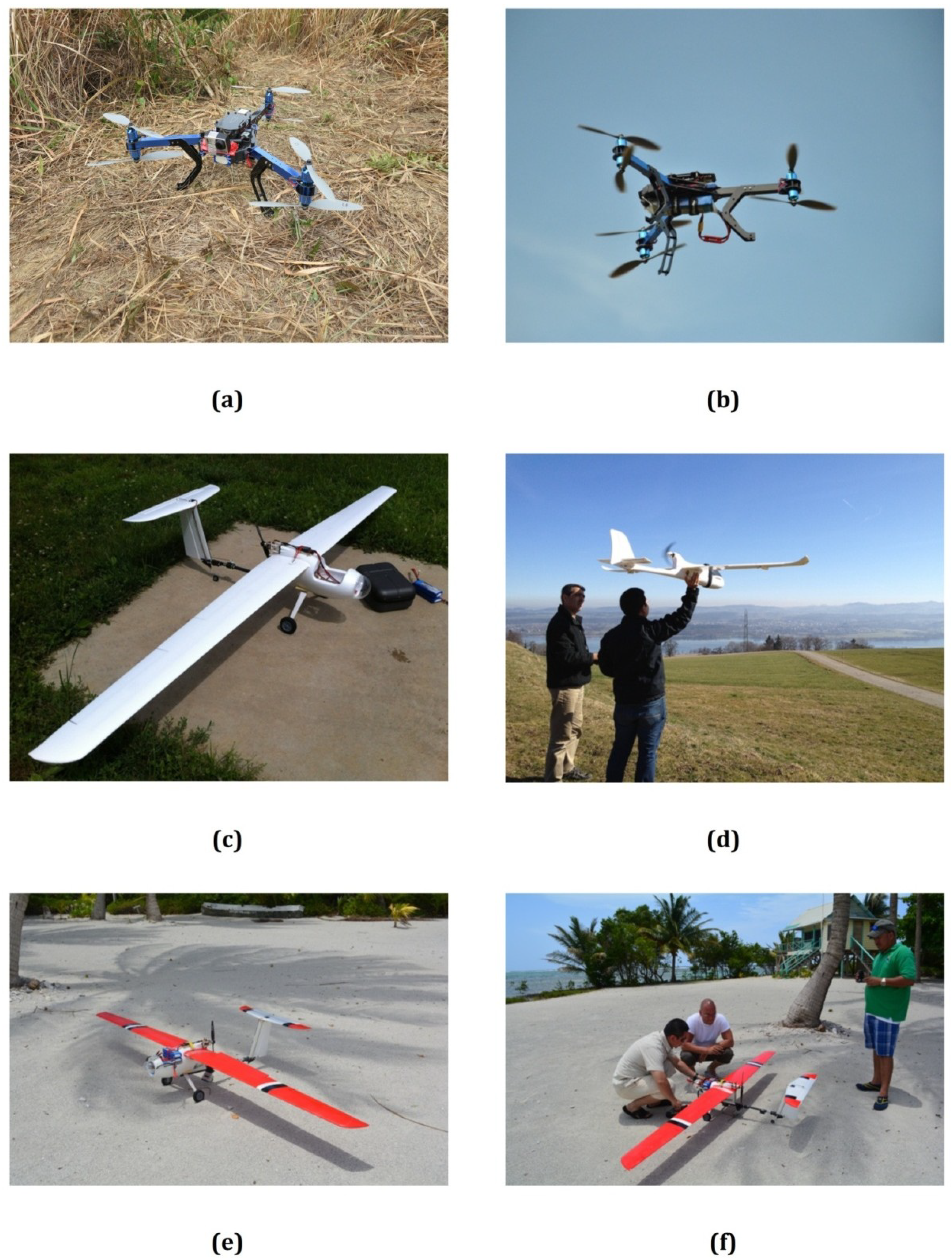
3. Small Drones Suitable for Community-Based Forest Monitoring
4. Key Advantages of a Drone-Assisted Community-Based Forest Monitoring Approach
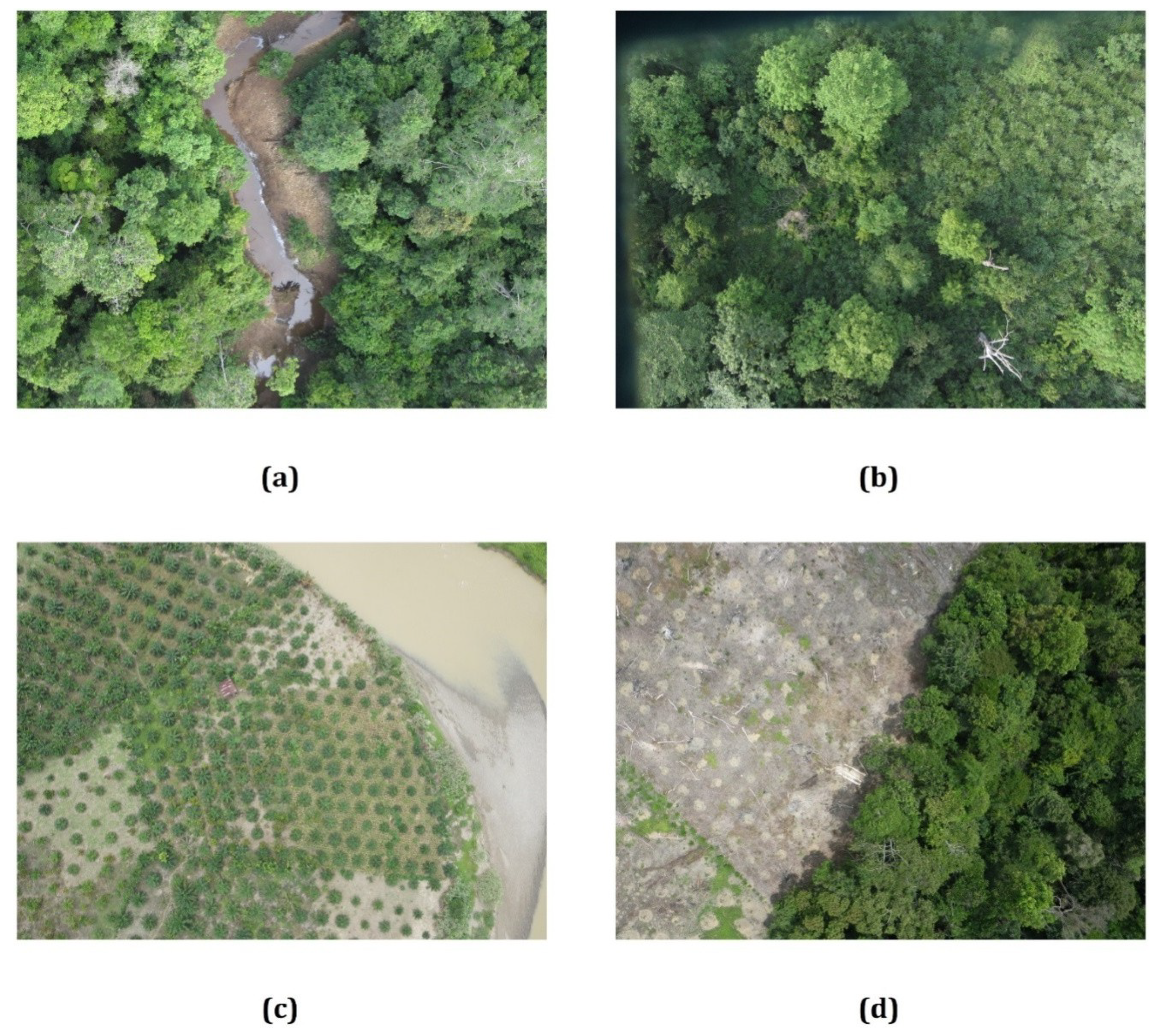
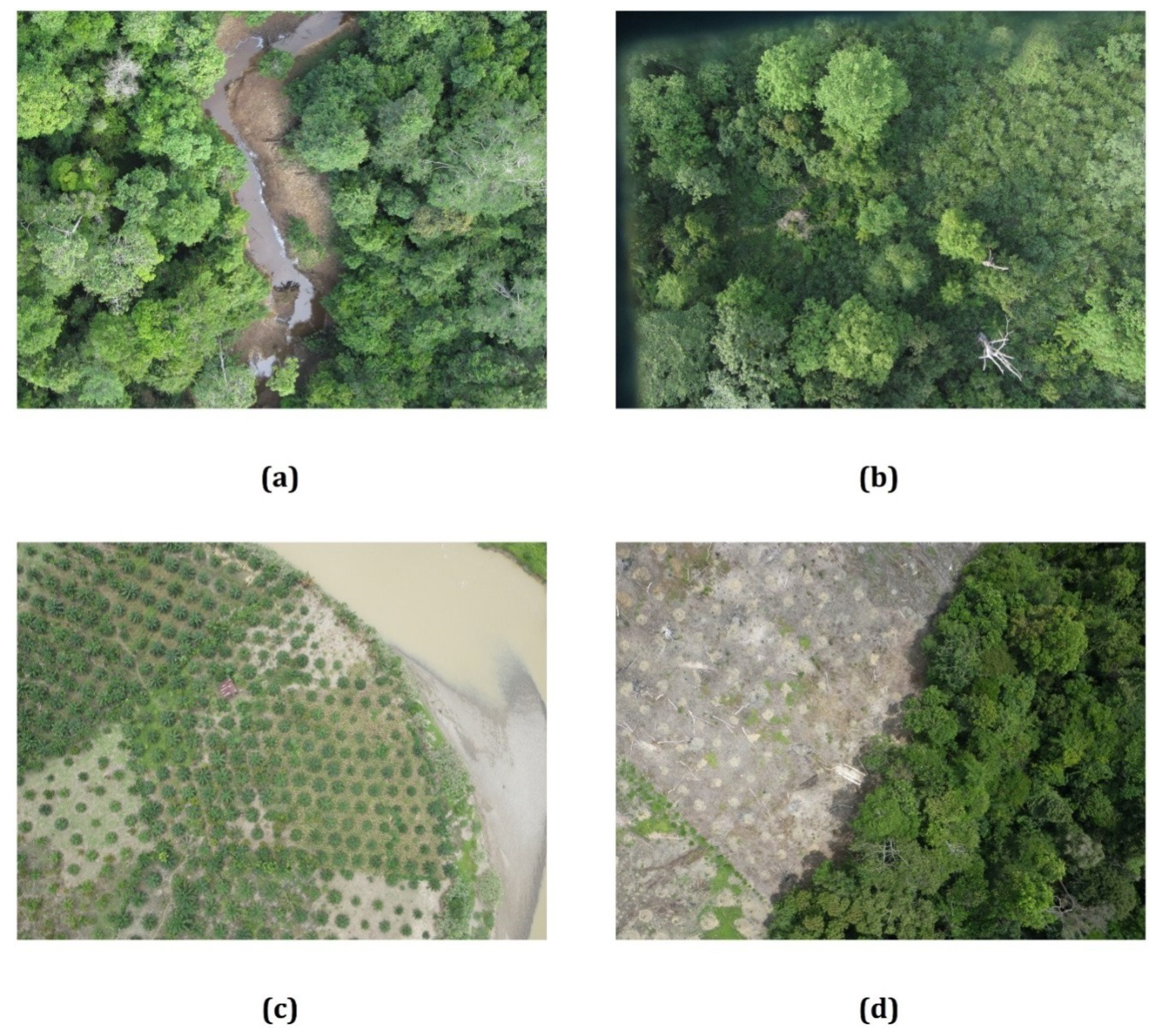
- Extremely high spatial resolution. The operational flying altitude of small drones, usually in the range of 50–300 m, permits the acquisition of extremely high spatial-resolution imagery, with pixels on the order of a few centimeters (rather than a few meters). This feature greatly enhances the visual analysis of imagery and thus can significantly improve CBFM. For instance, at this spatial resolution, specific trees and canopy gaps can be identified and easily monitored (see Figure 2). Furthermore, forest loss, degradation and regrowth processes could be accurately detected and monitored at this level of detail [97] by trained community members. Such data would not just be relevant for partner organizations and end-users, but also for communities themselves. For the former, the hyperspatial resolution of drone imagery would enable monitoring of many forest traits that currently are unachievable (at least accurately) through other remote sensing datasets. These include the identification of individual tree species by coupling imagery with botanical expertise, the detection of invasive plant species and pests, the estimation of aboveground biomass (where allometric equations exist for specific tree species), and the identification of different stages of forest regeneration or degradation, all of which are fundamental to assessing forest health condition, carbon storage and biodiversity levels, and hence to conservation and climate change mitigation policies. Although the retrieval of such information can be potentially accomplished by ground surveys alone, the use of small drones would also allow detailed mapping over much larger areas than ground surveys, and imagery at this spatial resolution should be much more meaningful to communities than ground survey data at the plot level.
- Potential for high temporal resolution. The comparatively lower cost of operation and maintenance of small drones allows users to acquire imagery far more frequently than with conventional remote sensing technologies such as satellite and piloted aircraft imagery. This means that community drone users would have the potential to update their imagery and compile high-resolution time-series imagery that would allow thorough assessments of local forest condition at much shorter intervals. Survey frequency could be decided according to organizations’ and end-users’ needs (so long as there is agreement with communities beforehand). This key feature would enable year-round monitoring of tropical forests, which is critical to improving tropical deforestation and degradation monitoring [98] because seasonal differences in canopy structure may be significant and therefore difficult to detect with single-date imagery. Tropical dry forests, for instance, exhibit a seasonal phenology associated with a long and severe dry season [99] and, therefore, require frequent observations to capture such phenological variations.Table 1. Qualitative assessment of the main advantages (a) and disadvantages (b) expected in the adoption of a drone-assisted community-based forest monitoring program, from the perspective of communities, partner organizations, and end-users.
Table 1. Qualitative assessment of the main advantages (a) and disadvantages (b) expected in the adoption of a drone-assisted community-based forest monitoring program, from the perspective of communities, partner organizations, and end-users. (a) Advantages c o u Extremely high spatial resolution 1 1 1 Potential for high temporal resolution 1–2 1 1 Insensitivity to cloud cover 2–3 1 1 Potential for three-dimensional drone image generation 3 1–2 1 Potential to ease CBFM and make it more attractive to communities 1 1–2 3 Shallow learning curve of drone users 1 1 3 Relatively low price of drone imagery 2–3 1 1 High cost-effectiveness within the context of CBFM 2–3 1 2–3 Data acquisition decentralization 1 1–2 2–3 Enhanced monitoring of illegal activities 1 1–2 2–3 Access to otherwise inaccessible areas 1 2–3 3 Potential environmental benefits 1–2 2–3 2–3 Potential social and institutional strengthening of communities 1 2–3 2–3 Control of data acquisition and ownership would lie in community members’ hands 1 1–2 3 (b) Disadvantages c o u Small payload 3 2–3 1–2 Low spectral resolution 3 2–3 1 Poor geometric and radiometric performance 3 2–3 1 Low software automation 3 2–3 1 Sensitivity to atmospheric conditions 2–3 1–2 1–2 Short flight endurance 1–2 1 1 Possibility of collisions 1 1 3 Potential problems for repairs and maintenance 1 1 3 Dependence on external assistance and funding 1 1 2–3 Ambiguous or cumbersome regulatory environments for flying small drones 1 1 1 Safety & security issues 1 1 1–2 Debatable relevance for community conservation and socio-economic development 1–3 1 3 Potential social impacts 1 1 2–3 Ethical issues 1 1 1–2 Notation: c = community, o = partner organization, u = end-user. Values refer to importance scores as follows: 1 = high, 2 = medium, 3 = low. More than one value (i.e., 1–2, 2–3, or 1–3) is also allowed and indicates that the importance of a particular advantage/disadvantage for c/o/u will be case-specific. For instance, the potential for high temporal resolution will be very important (value = 1) for communities with territorial problems because high re-survey frequency would allow for improved territorial surveillance, but not so important for other communities (value = 2).Figure 2. Examples of imagery gathered by small drones that show the extremely high spatial resolution that can be achieved. (a) Danau Girang (Sabah, Malaysia); (b) Chitwan National Park (Nepal); (c) Palm oil plantation by river (Indonesia); (d) Recently logged forest (Indonesia). Imagery provided by ConservationDrones.Figure 2. Examples of imagery gathered by small drones that show the extremely high spatial resolution that can be achieved. (a) Danau Girang (Sabah, Malaysia); (b) Chitwan National Park (Nepal); (c) Palm oil plantation by river (Indonesia); (d) Recently logged forest (Indonesia). Imagery provided by ConservationDrones.![]()
- Insensitivity to cloud cover. Small drones typically fly below cloud level (e.g., 50–100 m), which gives them a significant advantage over conventional remote sensing platforms, particularly in habitats with frequent dense cloud cover such as lowland rainforests and montane tropical cloud forests. Data provided by CBFM with small drones could greatly improve digital imagery of these cloud-covered regions, which would also benefit forest agencies and data end-users.
- Potential for three-dimensional drone image generation. Small drones are increasingly used for digital surface/elevation model generation [70,71]. The potential to apply 3-D imagery would seriously improve some tasks required to enhance forest monitoring strategies (e.g., the detection and quantification of forest degradation and regrowth stages). Also, the possibility of producing very accurate 3-D forest models with small drones would assist in the retrieval of forest structural parameters such as height, basal area, and tree density. In turn, this would improve the estimation of above-ground biomass, something urgently needed for improved carbon storage assessments in tropical forests [100]. Though the generation of 3-D products would be undertaken by data end-users and be particularly useful to them, 3-D maps might also represent a meaningful way for communities to better understand different features of their territories, including their forest resources.
- Potential to facilitate CBFM and make it more attractive to communities. Owing to the hyperspatial resolution of drone imagery and the potential for high survey frequency, a drone-assisted CBFM approach has the potential to ease CBFM in comparison with a conventional approach. For instance, forest strata within communities could be far more accurately delineated into homogenous units using small drones, which in turn could reduce the number of permanent ground plots needed per strata, and the number of attributes to be measured on the ground (e.g., canopy cover). In addition, the ability to survey the entire community territory with a few flights suggests that small drones could lead to significant time savings in monitoring and community data analysis, particularly in the case of medium- and large-sized community territories (i.e., hundreds to several thousand hectares). Moreover, the acquisition of high spatial and temporal resolution drone imagery would be far more meaningful to communities than the mere retrieval of plot-level forest data and, consequently, the utilization of drones would make CBFM more attractive to forest communities.
- Fast learning curve of drone users. Small drones can be programmed to operate either fully or semi-autonomously by users with relatively little training and geomatic knowledge. The commercial drone market is increasingly targeting people with little experience flying small drones and the smallest ones are particularly easy to fly by individuals with little training, so they would be appropriate for forest community members after receiving specific hands-on training from partner organizations. For instance, besides pre-programming flight paths and manual drone operation (flying, landing and take-off), setting up necessary components (e.g. GPS, photo/video camera) and downloading the acquired imagery onto a computer are all relatively straightforward tasks. Also, the geotagged drone images acquired could be mosaicked or overlaid onto Google Earth by community members after training so that they could carry out visual analyses of their forests [101]. Overall, training is relatively straightforward and varies from 1–5 days (in cases where trainees are familiar with computers) to 14 days (in cases where trainees have no prior experience with computers). In practice, the skills, innate ability and motivation for these technical activities are more likely to be found amongst younger community members.
- Relatively low price of drone imagery. The outlay required for purchasing, operating and maintaining a small drone is rather low when compared with the cost of commissioning piloted aircraft missions or acquiring imagery from any of the high spatial-resolution satellites available (e.g., IKONOS, QuickBird, RapidEye) on a regular basis. Cheap drones already exist for uses such as those discussed here. Koh and Wich [86], for instance, used a self-made conservation drone for tropical forest monitoring at an estimated cost of US$2,000, and are currently developing and testing cheaper models [102]. Small drone prices are expected to diminish swiftly, whilst simultaneously technical capabilities are improving (as is the case for most technology developments). Off-the-shelf solutions are available for anywhere up from US$3,000. Furthermore, there is a potential future in 3-D printed drones of sufficient specifications and capacity as the costs rapidly decrease; these are still in research and development status but progressing fast [103,104,105]. Organizations would not need to purchase expensive software to allow communities to program the missions and download the data, nor to process the imagery, as open-source solutions are already available and could be used along with their in-house software capabilities. Alternatively, organizations could outsource at a relatively low cost the pre- and post-processing of drone imagery gathered by communities. Many of the companies that manufacture and sell small drones also offer low-fee services that include imagery uploading, processing, ortho-mosaicking, and other analyses that may be needed (e.g., digital elevation mode
- High cost-effectiveness within the context of CBFM. The ability to survey all the community territory with a few flights would make the coupling of small drones with ground surveys more cost-effective than ground surveys alone. This is particularly pertinent if payments for monitoring are involved, because significantly less time would need to be devoted to surveys (at least for medium- and large-sized community territories, i.e., hundreds to several thousand hectares), and the approach remains cost effective when the costs of training community members in drone operation are factored in. If many communities in a region wish to employ small drones, however, it may be more effective to have a single small drone owned and operated by a consortium of communities (if they exist), a regional-scale NGO that participates with the communities, or, in some circumstances, a local authority that has sound relationships with the communities involved.
- Data acquisition decentralization. This has substantial advantages not just for communities but also for partner organizations and forest data end-users, including government agencies [28]. For instance, gathering forest data through a drone-assisted CBFM approach would permit the creation or enhancement of national forest inventories in tropical countries, thus potentially improving the management of community forest resources and their participation in REDD+ projects [26]. We propose that prior to setting up a CBFM system supported by small drones, communities would agree with partner organizations on the frequency of image acquisition, spatial resolution and delivery format, and the accompanying information which communities would pass on to organizations (e.g., other data from complementary ground surveys, qualitative data on forest change drivers).
- Enhanced monitoring of illegal activities. Illegal timber extraction could be monitored with these systems, not only by monitoring forest cover change with time-series photography, but also by locating extraction trails and regular monitoring of the boundaries in real-time with videography [85]. Fire and illegal land-use change that alter forest cover (e.g., cropping, pasture expansion) could also be monitored timely, as could illegal exploitation of forest resources and wildlife poaching [86]. The enhanced ability of small drones to monitor illegal activities could be of great significance for communities whose land or other resources are being stolen by abutters, as is often the case in many tropical forests [106].
- Access to inaccessible or remote areas. Areas difficult to access within a community territory (e.g., steep slopes, rocky terrain, swamps, mangroves) could be surveyed with small drones [85]. In addition, remote territorial areas could be more easily reached by small drones. This would be particularly useful in forest communities with low population densities and large territories, which are common in many tropical countries.
- Potential environmental benefits. The use of small drones can substitute for the need for community members to open forest trails to reach and survey dense forest patches, thus reducing forest degradation and the risk of affecting rare or sensitive species. Additionally, the relatively quiet operation of small drones does not seem likely to disturb or distress wildlife and people [85].
- Potential social and institutional strengthening of communities. Similar to other mapping technologies (e.g., GPS, participatory GIS), the use of drone technology has the potential to empower forest communities. Such empowerment might lead to their social and institutional strengthening and communities might then be in a much better position, for instance, to negotiate payments under REDD+ or other PES programs (e.g., [12,22,23]). Thus, capacity-building in this arena may help forest communities access new financial assets.
- Control of data acquisition and ownership would lie in community members’ hands. Based upon an appropriate agreement with partner organizations, community members could acquire imagery as often as desired [107] in order to gather relevant information for themselves (e.g., for monitoring illegal activity in specific conflict zones) and that required by outside organizations (e.g., related to REDD+). Thus, communities would not need to adapt to a strict monitoring operations calendar independently set up by government agencies or companies in charge of satellites or piloted aircraft. Community drone users should have no legal restrictions regarding data acquisition as long as they do not violate flying regulations specific to small drones, whether safety, nuisance, or privacy. Moreover, data should be owned by the community so that it can become a relevant actor in any negotiation regarding their forests, particularly in connection with REDD+ projects.

{kind=link}
{kind=link}
5. Key Disadvantages of a Drone-Assisted Community-Based Forest Monitoring Approach
- Small payload. Small drones are greatly constrained by the amount of equipment they can carry onboard owing to their small size and low weight. This limits the quality of the imaging sensors that can be fitted into a small drone, which together with the high price of professional small imaging sensors, hampers the acquisition of certain types of data and, therefore, of certain types of analyses that organizations and end-users might want to undertake.
- Low spectral resolution. Although small drones can be outfitted with a variety of sensors (e.g., multispectral, hyperspectral, lidar, radar) tailored to the specific needs of users, the high costs of such high spectral-resolution sensors makes their utilization unlikely in the case of CBFM, particularly if many communities wish to participate in the CBFM approach presented here for programs such as REDD+. However, the conventional RGB digital cameras frequently used in small drones might not suffice for certain tasks associated with scientific forest monitoring (e.g., leaf physiological properties), which need greater spectral resolution.
- Poor geometric and radiometric performance. First, because small drones are so much lighter than spaceborne and airborne sensing platforms, they are far more susceptible to pitch, roll and yaw distortions, which in turn affect the possibility of accurately georeferencing the imagery acquired. This problem is further aggravated by typically insufficient state-data recorded by low-cost small drones. Therefore, geometric distortions may be difficult to resolve even for remote sensing experts. In addition, accurate ground control points may be needed for image registration and ortho-rectification, which might be difficult for community members to gather due to the absence of evident landmarks over forested regions. Second, because cheap digital cameras are frequently used instead of professional imaging sensors, poor radiometry in image mosaics may lead to inaccuracies in the products derived. These geometric and radiometric problems may only be a problem for end-users when very accurate products are needed, however, and improvements in small drone technology are expected to overcome these issues within the next few years.
- Low software automation. Most common image pre-processing and processing tasks still require improvements in automation so that complex analyses can be done faster by organizations and end-users. This includes stitching imagery over densely forested areas and geometric and radiometric corrections if a great level of accuracy is needed, particularly in the case of time-series analyses. But again this issue is being rapidly improved by remote sensing software developers.
- Sensitivity to atmospheric conditions. Although small drones can usually fly sufficiently low so as not to be affected by cloud cover, other atmospheric conditions such as fog, heavy rain, and strong and variable winds can hinder their operation. For best imaging accuracies, wind speed should be as low as possible and, depending upon the specific drone model, typically they should not be higher than 15–25 km/h.
- Short flight endurance. This is potentially a very significant constraint because the low weight capacity severely restricts the size of the batteries a drone can carry. Nonetheless, this should not be a major constraint for CBFM unless a community’s territory is very large. Flight times of around 50–60 min are currently feasible and can image up to 500 ha for a flight at 250 m altitude, which results in an extremely high spatial resolution of less than 10 cm per pixel side [108]. Several such missions could potentially be flown during one day from different locations within the community and thus map a relatively large area.
- Possibility of collisions. Small drones are not usually equipped with warning or evasion systems, and collisions can occur if flight input coordinates are entered incorrectly or if something enters their flight path [85]. There are dangers of collisions with power lines, cell phone masts, etc., especially with inexperienced operators. Due to their airframe fragility, collisions pose a significant risk to small drones and warrant the need for training and acquiring expertise on flight path setting and manual maneuvering when needed. Yet, as drone operators would be community members who know the area well, this is not expected to be a major issue after adequate training. The availability of reliable digital terrain models might help better set up the flight altitude in mountainous areas, thus alleviating the possibility of collisions.
- Potential problems for repairs and maintenance. Drone repair is difficult for non-experts. This may pose a significant problem if crashes occur, the drone or any component breaks down, or something is lost or stolen. Hiring a mechanic or sending the drone for repair to the partner organization may significantly increase the operating cost and loss of flying time. Though such problems are rapidly decreasing due to technological improvements, without securing funds and trained personnel to perform repairs and maintenance as necessary, we would expect the utilization of drones in CBFM to be severely hampered in the short-term. A well-prepared operational plan for how to deal with these contingencies is essential.
- Dependence on external assistance and funding. Along with the need for assistance whenever a community-operated drone breaks down or needs maintenance, communities would be very dependent on initial training and continued funding from partner organizations or government agencies. However, determining the amount of external assistance needed for community training and how much external funding is necessary requires further investigation. Nevertheless, we expect this disadvantage to diminish rapidly as technology is fast improving in terms of cost, quality and ease of use.
- Ambiguous or cumbersome regulations for flying small drones. The laws of many countries regarding the use of small drones are ambiguous. For example, in the USA, strict regulations and a cumbersome permit process impede their use, particularly in the case of non-commercial models. Strict regulations are repeatedly highlighted as a major impediment to the widespread adoption of small drones in research and civil applications [40,45,109]. In most tropical countries, however, clear regulations do not exist yet, and we do not expect very strict regulations for environmental applications such as CBFM. Actually, flying permits may not be needed for CBFM in communities with secure land tenure arrangements as long as flights are kept at low altitudes within community property.
- Safety and security issues. The operation of small drones in dangerous territories, such as community forests where illegal logging and farming, poaching, illegal drug production, land encroachment, or military activities might be taking place, may pose significant threats to the security of the drone operators, other community members, and even the partner organizations' personnel involved in the CBFM program. Although this is not a specific problem of drones, illegal actors might feel more intimidated by small drones than by people on the ground if they know of their surveillance capabilities (e.g., video recording).
- Debatable relevance for community conservation and socio-economic development. Communities must have a clear interest and commitment toward monitoring their forest resources in a “scientific” manner, particularly if they wish to participate in REDD+ or other PES programs. This approach to CBFM would not be relevant and could be antagonistic for communities that do not want to engage in externally-driven conservation programs and development projects on ideological grounds. Indeed, a reliance on drone technology usage could be felt as reinforcing trends toward “modernization” and provoking radical changes in the wants and aspirations of community members. Worryingly, such changes might lead to social conflicts within and among communities.
- Potential social impacts. The use of small drones for monitoring raises a series of social, cultural and political issues. Thus, for instance, drone technology usage might lead to community segmentation by widening the knowledge gap amongst technology users and other community members (younger/older, male/female) and by altering the existing internal power dynamics. Engaging in drone-assisted CBFM for REDD+ or other PES projects might cause communities to lose their material and perceived autonomy as regards their socio-economic and cultural traditions (e.g., decrease of time devoted to traditional activities in farming, hunting and foraging as a result of more time spent in forest measurement and monitoring, which may be detrimental for traditional knowledge conservation [110]). Employing small drones for CBFM should thus be subject to social approval and consensus from community members prior to implementation in order to avoid or reduce potential conflicts [111].
- Ethical issues. The most immediate ethical concern is the possibility of privacy violations and the requirements for free, prior and informed consent (FPIC). These issues are pertinent in all instances of the surveillance of people, their properties, resources and activities [35], but are especially salient in the case of small drones because people may feel that a flyover is even further outside their control than are ground surveys. The misuse of drone technology for surveillance without acceptable transparency and communally-agreed rules of engagement could provoke severe conflicts amongst community members (e.g., accusations of privacy violations and spying). Partner organizations could be ultimately blamed for whatever problems that might arise amongst community members as a result of the introduction of drone technology (e.g., conflicts resulting from surveillance of private properties, whether as purposeful espionage or an unintended outcome of forest monitoring). Ethical issues would therefore be a particular concern for organizations introducing small drones to forest communities.
6. Expected Improvements in Forest Monitoring by Means of Small Drones to Support CBFM Programs
- (1)
- Improvements in gathering spatially-explicit forest data at the community-wide scale, which is the first stage of data needs for sound CBFM [23]. Drone aerial surveys could be combined with participatory mapping approaches to better identify and map areas of particular interest (e.g., where deforestation, degradation or regrowth processes occur, community boundaries and conflict zones, forest areas under different land tenure arrangements, management types and rules, forest areas sensitive to natural hazards and illegal activities).
- (2)
- Improvements in gathering spatially-explicit forest data at the plot level, which is the second stage of data needs for sound CBFM [23], even though less permanent plots might need to be surveyed and fewer forest variables might need to be measured in them. Plots would be accurately mapped rather than just surveyed on the ground, thus leading to the retrieval of more meaningful forest data.
- (3)
- Achievements in (1) and (2) would lead to improvements in characterizing, at the community scale and for each forest type: (a) forest condition (i.e., level of conservation, degradation or recovery); (b) carbon stocks and biodiversity levels; and (c) drivers of deforestation, degradation and regrowth. We posit that the data quality obtained from communities who engage in a well-designed drone-assisted CBFM approach would far exceed what is feasible without community participation using conventional forest monitoring approaches. In the context of REDD+, such data would be much more detailed than the requirements of the highest reporting level of the IPCC (i.e., tier 3). The ability of small drones to map and quantify forest degradation and regrowth, and therefore to improve the estimates of carbon emissions and sequestration related to both processes, would be particularly significant in the context of REDD+ MRV systems. In practice, the second “D” and the “+” of REDD+ are neglected to date, owing to the inability of conventional remote sensing imagery to accurately map degradation and regrowth [112,113], a problem further aggravated in the complex landscape mosaics often found across tropical forests [113].
- (4)
- Improvements in the previous three areas could significantly enhance the modeling of carbon stocks and biodiversity levels at local scales according to different scenarios, as well as validate existing models. More accurate models at local scales would lead to more accurate scaling up to regional/national/international forest modeling efforts such as those commonly undertaken with remote sensing imagery of coarser spatial resolution (e.g., Landsat, MODIS, AVHRR). For instance, at present there is a significant mismatch between above-ground biomass field measurements and estimates from conventional remote sensing data [114]. We believe that a drone-assisted CBFM approach could help bridge this gap and thus improve scaling up above-ground biomass models from which to enhance the estimates of carbon stocks.
7. Opportunities and Constraints for Designing and Launching Drone-Assisted Community-Based Forest Monitoring Programs in Tropical Forests
8. Conclusions
Acknowledgments
Author Contributions
Conflict of Interest
References and Notes
- Canadell, J.G.; Raupach, M.R. Managing Forests for Climate Change Mitigation. Science 2008, 320, 1456–1457. [Google Scholar] [CrossRef]
- Bradshaw, C.J.A.; Sodhi, N.S.; Brook, B.W. Tropical Turmoil: A Biodiversity Tragedy in Progress. Front. Ecol. Environ. 2009, 7, 79–87. [Google Scholar]
- Maffi, L. Linguistic, Cultural and Biological Diversity. Annu. Rev. Anthropol. 2005, 29, 599–617. [Google Scholar] [CrossRef]
- Sunderlin, W.D.; Dewi, S.; Puntodewo, A.; Muller, D.; Angelsen, A.; Epprecht, M. Why Forests are Important for Global Poverty Alleviation: A Spatial Explanation. Ecol. Soc. 2008, 13, 24. [Google Scholar]
- Sunderlin, W.D.; Angelsen, A.; Belcher, B.; Burgers, P.; Nasi, R.; Santoso, L.; Wunder, S. Livelihoods, Forests, and Conservation in Developing Countries: An Overview. World Dev. 2005, 33, 1383–1402. [Google Scholar] [CrossRef]
- Sunderlin, W.D. Poverty Alleviation through Community Forestry in Cambodia, Laos, and Vietnam: An Assessment of the Potential. For. Policy Econ. 2006, 8, 386–396. [Google Scholar] [CrossRef]
- Porter-Bolland, L.; Ellis, E.A.; Guariguata, M.R.; Ruiz-Mallen, I.; Negrete-Yankelevich, S.; Reyes-Garcia, V. Community Managed Forests and Forest Protected Areas: An Assessment of Their Conservation Effectiveness across the Tropics. For. Ecol. Manag. 2012, 268, 6–17. [Google Scholar] [CrossRef]
- Referred to forest protected areas, which are forest lands under state management devoted to biological conservation.
- Bowler, D.E.; Buyung-Ali, L.M.; Healey, J.R.; Jones, J.P.G.; Knight, T.M.; Pullin, A.S. Does Community Forest Management Provide Global Environmental Benefits and Improve Local Welfare? Front. Ecol. Environ. 2011, 10, 29–36. [Google Scholar]
- CBFM refers to forest monitoring carried out by community members (usually after receiving training from scientists or partner organizations working with communities), in contrast to more conventional monitoring approaches undertaken by scientists or outside experts. Note that some literature also refers to CBFM as community-based forest management.
- CBFM may also be required for communities wishing to engage in other payment for ecosystem services (PES) schemes or development projects (e.g., agro-forestry or certified forest products).
- Danielsen, F.; Skutsch, M.; Burgess, N.D.; Jensen, P.M.; Andrianandrasana, H.; Karky, B.; Lewis, R.; Lovett, J.C.; Massao, J.; Ngaga, Y.; et al. At the Heart of REDD+: A Role for Local People in Monitoring Forests? Conserv. Lett. 2011, 4, 158–167. [Google Scholar] [CrossRef]
- Skutsch, M.; McCall, M.K. Why Community Forest Monitoring? In Community Forest Monitoring for the Carbon Market: Opportunities under REDD; Skutsch, M., Ed.; Earthscan: Oxford, UK, 2011; pp. 3–15. [Google Scholar]
- We use “community forests” to refer to forests inhabited and managed by communities under any forest tenure arrangement (although such forests are often privately or collectively owned).
- Sandbrook, C.; Nelson, F.; Adams, W.M.; Agrawal, A. Carbon, Forests and the REDD Paradox. Oryx 2010, 44, 330–334. [Google Scholar] [CrossRef]
- Chhatre, A.; Agrawal, A. Trade-offs and Synergies between Carbon Storage and Livelihood Benefits from Forest Commons. Proc. Natl. Acad. Sci. USA 2009, 106, 17667–17670. [Google Scholar] [CrossRef]
- Larson, A.M.; Petkova, E. An Introduction to Forest Governance, People and REDD+ in Latin America: Obstacles and Opportunities. Forests 2011, 2, 86–111. [Google Scholar] [CrossRef]
- Agrawal, A.; Nepstad, D.; Chhatre, A. Reducing Emissions from Deforestation and Forest Degradation. Annu. Rev. Environ. Resour. 2011, 36, 373–396. [Google Scholar] [CrossRef]
- Scheyvens, H. Community-Based Forest Monitoring for REDD+:Lessons and Reflections from the Field; IGES Policy Brief; Institute for Global Environmental Strategies: Arlington, VA, USA, 2012; p. 10. [Google Scholar]
- Larrazábal, A.; McCall, M.K.; Mwampamba, T.H.; Skutsch, M. The Role of Community Carbon Monitoring for REDD+: A Review of Experiences. Curr. Opin. Environ. Sustain. 2012, 4, 707–716. [Google Scholar] [CrossRef]
- Pratihast, A.; Herold, M.; Avitabile, V.; de Bruin, S.; Bartholomeus, H.; Souza, C.M., Jr.; Ribbe, L. Mobile Devices for Community-Based REDD+ Monitoring: A Case Study for Central Vietnam. Sensors 2012, 13, 21–38. [Google Scholar]
- Knowles, T.; McCall, M.; Skutsch, M.; Theron, L. Preparing Community Forestry for REDD+:Engaging Local Communities in the Mapping and MRV Requirements of REDD+; Pathways for Implementing REDD+: Experiences from Carbon Markets and Communities; Perspectives Series; UNEP Risø Centre: Roskilde, Denmark, 2010. [Google Scholar]
- McCall, M.K. Local Participation in Mapping, Measuring and Monitoring for Community Carbon Forestry. In Community Forest Monitoring for the Carbon Market: Opportunities under REDD; Skutsch, M., Ed.; Earthscan: Oxford, UK, 2011; pp. 31–44. [Google Scholar]
- Palmer Fry, B. Community Forest Monitoring in REDD+: The “M” in MRV? Environ. Sci. Policy 2011, 14, 181–187. [Google Scholar]
- That is, to contribute forest data to typically sparse national inventories based on a relatively small number of permanent plots.
- Pratihast, A.K.; Herold, M.; de Sy, V.; Murdiyarso, D.; Skutsch, M. Linking Community-Based and National REDD+ Monitoring: A Review of the Potential. Carbon Manag. 2013, 4, 91–104. [Google Scholar]
- Joseph, S.; Herold, M.; Sunderlin, W.D.; Verchot, L.V. REDD+ Readiness: Early Insights on Monitoring, Reporting and Verification Systems of Project Developers. Environ. Res. Lett. 2013, 8. [Google Scholar] [CrossRef]
- Asner, G.P. Satellites and Psychology for Improved Forest Monitoring. Proc. Natl. Acad. Sci. USA 2014, 111, 567–568. [Google Scholar] [CrossRef]
- Ostrom, E.; Nagendra, H. Insights on Linking Forests, Trees, and People from the Air, on the Ground, and in the Laboratry. Proc. Natl. Acad. Sci. USA 2006, 103, 19224–19231. [Google Scholar] [CrossRef]
- Skutsch, M. Community Forest Monitoring for the Carbon Market: Opportunities under REDD; Earthscan: Oxford, UK, 2011. [Google Scholar]
- Van der Werf, G.; Morton, D.; DeFries, R.; Olivier, J.; Kasibhatla, P.; Jackson, R.; Collatz, G.; Randerson, J. CO2 Emissions from Forest Loss. Nat. Geosci. 2009, 2, 737–738. [Google Scholar] [CrossRef]
- Corbera, E.; Estrada, M.; Brown, K. Reducing Greenhouse Gas Emissions from Deforestation and Forest Degradation in Developing Countries: Revisiting the Assumptions. Clim. Chang. 2010, 100, 355–388. [Google Scholar] [CrossRef]
- Drones are frequently referred to in the literature as UAV (Unmanned Aerial Vehicles), UAS (Unmanned Aircraft Systems), and less frequently as RPV (Remotely Piloted Vehicles). We avoid using “unmanned” because of its gendered connotation and favor the more generic term “drone”, despite the association this term invokes with the US military's controversial air strikes. In cases where this negative connotation may undermine cooperation with communities, we propose the use of alternative terms such as “Remotely Controlled Aircraft Systems” (RCAS) or “Community Aerial Survey Assistant” (CASA).
- Newcome, L.R. Unmanned Aviation: A Brief History of Unmanned Aerial Vehicles; American Institute of Aeronautics and Astronautics, Inc.: Reston, VA, USA, 2004. [Google Scholar]
- Anderson, C. Here Come the Drones; Wired Magazine: London, UK, 2012; pp. 102–111. [Google Scholar]
- Esler, D. How UAVs Will Change Aviation. Bus. Commer. Aviat. 2010, 106, 46. [Google Scholar]
- Tomlins, G. Some Considerations in the Design of Low-Cost Remotely-Piloted Aircraft for Civil Remote Sensing Applications. Can. Surv. 1983, 37, 157–167. [Google Scholar]
- Tomlins, G.; Manore, M. Remotely Piloted Aircraft for Small Format Aerial Photography. In Proceedings of the Canadian Symposium on Remote Sensing8thand Association Quebecoise de Teledetection, Congress, 4th, Montreal, QC, Canada, 3–6 May 1983; pp. 127–136.
- Tomlins, G.F.; Lee, Y.J. Remotely Piloted Aircraft—An Inexpensive Option for Large-Scale Aerial Photography in Forestry Applications. Can. J. Remote Sens. 1983, 9, 76–85. [Google Scholar]
- Hardin, P.J.; Hardin, T.J. Small-Scale Remotely Piloted Vehicles in Environmental Research. Geogr. Compass 2010, 4, 1297–1311. [Google Scholar] [CrossRef]
- Nyquist, J.E. Applications of Low-Cost Radio-Controlled Airplanes to Environmental Restoration at Oak Ridge National Laboratory. In Proceedings of the 23rd Annual Association for Unmanned Vehicle Systems International Symposium and Exhibition, Orlando, FL, USA, 15–19 July 1996; Association for Unmanned Vehicle Systems International: Orlando, FL, USA, 1996; pp. 817–829. [Google Scholar]
- Quilter, M.C.; Anderson, V.J. Low Altitude/Large Scale Aerial Photographs: A Tool for Range and Resource Managers. Rangel. Arch. 2000, 22, 13–17. [Google Scholar]
- Hardin, P.; Jensen, R. Small-Scale Unmanned Aerial Vehicles in Environmental Remote Sensing: Challenges and Opportunities. GISci. Remote Sens. 2011, 48, 99–111. [Google Scholar]
- Rango, A.; Laliberte, A.; Steele, C.; Herrick, J.E.; Bestelmeyer, B.; Schmugge, T.; Roanhorse, A.; Jenkins, V. Using Unmanned Aerial Vehicles for Rangelands: Current Applications and Future Potentials. Environ. Pract. 2006, 8, 159–168. [Google Scholar]
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use. Remote Sens. 2012, 4, 1671–1692. [Google Scholar]
- Zhang, C.; Kovacs, J. The Application of Small Unmanned Aerial Systems for Precision Agriculture: A Review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Hardin, P.J.; Jensen, R.R. Introduction—Small-Scale Unmanned Aerial Systems for Environmental Remote Sensing. GISci. Remote Sens. 2011, 48, 1–3. [Google Scholar] [CrossRef]
- Boyd, D.; Danson, F. Satellite Remote Sensing of Forest Resources: Three Decades of Research Development. Prog. Phys. Geogr. 2005, 29, 1–26. [Google Scholar] [CrossRef]
- Foody, G. Remote Sensing of Tropical Forest Environments: Towards the Monitoring of Environmental Resources for Sustainable Development. Int. J. Remote Sens. 2003, 24, 4035–4046. [Google Scholar] [CrossRef]
- Wulder, M. Optical Remote-Sensing Techniques for the Assessment of Forest Inventory and Biophysical Parameters. Prog. Phys. Geogr. 1998, 22, 449–476. [Google Scholar] [CrossRef]
- Dubayah, R.O.; Drake, J.B. LiDAR Remote Sensing for Forestry. J. For. 2000, 98, 44–46. [Google Scholar]
- Treuhaft, R.N.; Law, B.E.; Asner, G.P. Forest Attributes from Radar Interferometric Structure and Its Fusion with Optical Remote Sensing. BioScience 2004, 54, 561–571. [Google Scholar]
- Berni, J.A.J.; Zarco-Tejada, P.J.; Sepulcre-Canto, G.; Fereres, E.; Villalobos, F. Mapping Canopy Conductance and CWSI in Olive Orchards Using High Resolution Thermal Remote Sensing Imagery. Remote Sens. Environ. 2009, 113, 2380–2388. [Google Scholar] [CrossRef]
- Hunt, E.; Hively, W.; McCarty, G.; Daughtry, C.; Forrestal, P.; Kratochvil, R.; Carr, J.; Allen, N.; Fox-Rabinovitz, J.; Miller, C. Nir-Green-Blue High-Resolution Digital Images for Assessment of Winter Cover Crop Biomass. GISci. Remote Sens. 2011, 48, 86–98. [Google Scholar] [CrossRef]
- Booth, D.T.; Cox, S.E. Art to Science: Tools for Greater Objectivity in Resource Monitoring. Rangelands 2011, 33, 27–34. [Google Scholar] [CrossRef]
- Breckenridge, R.P.; Dakins, M.; Bunting, S.; Harbour, J.L.; White, S. Comparison of Unmanned Aerial Vehicle Platforms for Assessing Vegetation Cover in Sagebrush Steppe Ecosystems. Rangel. Ecol. Manag. 2011, 64, 521–532. [Google Scholar] [CrossRef]
- Laliberte, A.S.; Goforth, M.A.; Steele, C.M.; Rango, A. Multispectral Remote Sensing from Unmanned Aircraft: Image Processing Workflows and Applications for Rangeland Environments. Remote Sens. 2011, 3, 2529–2551. [Google Scholar] [CrossRef]
- Laliberte, A.S.; Winters, C.; Rango, A. UAS Remote Sensing Missions for Rangeland Applications. Geocarto Int. 2010, 26, 141–156. [Google Scholar]
- Rango, A.; Laliberte, A.; Herrick, J.E.; Winters, C.; Havstad, K.; Steele, C.; Browning, D. Unmanned Aerial Vehicle-Based Remote Sensing for Rangeland Assessment, Monitoring, and Management. J. Appl. Remote Sens. 2009, 3. [Google Scholar] [CrossRef]
- Getzin, S.; Wiegand, K.; Schoening, I. Assessing Biodiversity in Forests Using very High-Resolution Images and Unmanned Aerial Vehicles. Methods Ecol. Evol. 2012, 3, 397–404. [Google Scholar] [CrossRef]
- Jones, G.P.; Pearlstine, L.G.; Percival, H.F. An Assessment of Small Unmanned Aerial Vehicles for Wildlife Research. Wildl. Soc. Bull. 2006, 34, 750–758. [Google Scholar]
- Rodríguez, A.; Negro, J.J.; Mulero, M.; Rodríguez, C.; Hernández-Pliego, J.; Bustamante, J. The Eye in the Sky: Combined Use of Unmanned Aerial Systems and GPS Data Loggers for Ecological Research and Conservation of Small Birds. PLoS One 2012, 7, e50336. [Google Scholar]
- Sardà-Palomera, F.; Bota, G.; Viñolo, C.; Pallarés, O.; Sazatornil, V.; Brotons, L.; Gomáriz, S.; Sardà, F. Fine-Scale Bird Monitoring from Light Unmanned Aircraft Systems. IBIS 2012, 154, 177–183. [Google Scholar] [CrossRef]
- Watts, A.C.; Perry, J.H.; Smith, S.E.; Burgess, M.A.; Wilkinson, B.E.; Szantoi, Z.; Ifju, P.G.; Percival, H.F. Small Unmanned Aircraft Systems for Low-Altitude Aerial Surveys. J. Wildl. Manag. 2010, 74, 1614–1619. [Google Scholar] [CrossRef]
- Guichard, F.; Bourget, E.; Agnard, J.-P. High-Resolution Remote Sensing of Intertidal Ecosystems: A Low-Cost Technique to Link Scale-Dependent Patterns and Processes. Limnol. Oceanogr. 2000, 45, 328–338. [Google Scholar]
- Hervoue, A.; Dunford, R.; Piegay, H.; Belletti, B.; Tremelo, M.-L. Analysis of Post-Flood Recruitment Patterns in Braided-Channel Rivers at Multiple Scales Based on an Image Series Collected by Unmanned Aerial Vehicles, Ultra-Light Aerial Vehicles, and Satellites. GISci. Remote Sens. 2011, 48, 50–73. [Google Scholar] [CrossRef]
- Wundram, D.; Löffler, J. High-Resolution Spatial Analysis of Mountain Landscapes Using a Low-Altitude Remote Sensing Approach. Int. J. Remote Sens. 2007, 29, 961–974. [Google Scholar] [CrossRef]
- Corbane, C.; Jacob, F.; Raclot, D.; Albergel, J.; Andrieux, P. Multitemporal Analysis of Hydrological Soil Surface Characteristics Using Aerial Photos: A Case Study on a Mediterranean Vineyard. Int. J. Appl. Earth Obs. Geoinform. 2012, 18, 356–367. [Google Scholar]
- Ries, J.B.; Marzolff, I. Monitoring of Gully Erosion in the Central Ebro Basin by Large-Scale Aerial Photography Taken from a Remotely Controlled Blimp. Catena 2003, 50, 309–328. [Google Scholar] [CrossRef]
- Eisenbeiss, H.; Zhang, L. Comparison of DSMs Generated from Mini UAV Imagery and Terrestrial Laser Scanner in a Cultural Heritage Application. In Proceedings of the International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences XXXVI-5, Dresden, Germany, 25–27 September 2006.
- Haarbrink, R.; Eisenbeiss, H. Accurate DSM Production from Unmanned Helicopter Systems. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 1259–1264. [Google Scholar]
- Ambrosia, V.G.; Wegener, S.S.; Sullivan, D.V.; Buechel, S.W.; Dunagan, S.E.; Brass, J.A.; Stoneburner, J.; Schoenung, S.M. Demonstrating UAV-Acquired Real-Time Thermal Data over Fires. Photogramm. Eng. Remote Sens. 2003, 69, 391–402. [Google Scholar]
- Casbeer, D.W.; Kingston, D.B.; Beard, R.W.; McLain, T.W. Cooperative Forest Fire Surveillance using a Team of Small Unmanned Air Vehicles. Int. J. Syst. Sci. 2006, 37, 351–360. [Google Scholar] [CrossRef]
- Merino, L.; Caballero, F.; Ramiro Martinez-de-Dios, J.; Maza, I.; Ollero, A. An Unmanned Aircraft System for Automatic Forest Fire Monitoring and Measurement. J. Intell. Robot. Syst. 2012, 65, 533–548. [Google Scholar] [CrossRef]
- Hinkley, E.A.; Zajkowski, T. USDA Forest Service–NASA: Unmanned Aerial Systems Demonstrations—Pushing the Leading Edge in Fire Mapping. Geocarto Int. 2011, 26, 103–111. [Google Scholar] [CrossRef]
- Aber, J.S.; Aber, S.W.; Pavri, F. Unammned Small Format Aerial Photography from Kites Acquiring Large-Scale, High-Resolution, Multiview-Angle Imagery. In Proceedings of the Pecora 15/Land Satellite Information IV/ISPRS Commission I/FIEOS 2002, Denver, CO, USA, 8–15 November 2002; ASPRS: The Imaging & Geospatial Information Society: Denver, CO, USA, 2002; pp. 1–6. [Google Scholar]
- Aber, J.S.; Sobieski, R.J.; Distler, D.A.; Nowak, M.C. Kite Aerial Photography for Environmental Site Investigations in Kansas. Trans. Kansas Acad. Sci. 1999, 102, 57–67. [Google Scholar] [CrossRef]
- Dunford, R.; Michel, K.; Gagnage, M.; Piegay, H.; Tremelo, M.L. Potential and Constraints of Unmanned Aerial Vehicle Technology for the Characterization of Mediterranean Riparian Forest. Int. J. Remote Sens. 2009, 30, 4915–4935. [Google Scholar]
- Hung, C.; Bryson, M.; Sukkarieh, S. Multi-Class Predictive Template for Tree Crown Detection. ISPRS J. Photogramm. Remote Sens. 2012, 68, 170–183. [Google Scholar] [CrossRef]
- Lin, Y.; Hyyppa, J.; Jaakkola, A. Mini-UAV-Borne LiDAR for Fine-Scale Mapping. IEEE Geosci. Remote Sens. 2011, 8, 426–430. [Google Scholar] [CrossRef]
- Mäkynen, J.; Saari, H.; Holmlund, C.; Mannila, R.; Antila, T. Multi- and Hyperspectral UAV Imaging System for Forest and Agriculture Applications. In Next-Generation Spectroscopic Technologies V; Druy, M.A., Crocombe, R.A., Eds.; Proc. SPIE: Baltimore, Maryland, USA, 2012; Volume 8374, pp. 1–9. [Google Scholar]
- Saari, H.; Pellikka, I.; Pesonen, L.; Tuominen, S.; Heikkilä, J.; Holmlund, C.; Mäkynen, J.; Ojala, K.; Antila, T. Unmanned Aerial Vehicle (UAV) Operated Spectral Camera System for Forest and Agriculture Applications. In Proceedings of the SPIERemote Sensing for AgricultureEcosystemsand Hydrology XIII, Prague, Czech Republic, 19 September 2011; p. 81740H.
- Lisein, J.; Pierrot-Deseilligny, M.; Bonnet, S.; Lejeune, P. A Photogrammetric Workflow for the Creation of a Forest Canopy Height Model from Small Unmanned Aerial System Imagery. Forests 2013, 4, 922–944. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Watson, C.; Turner, D. Development of a UAV-LiDAR System with Application to Forest Inventory. Remote Sens. 2012, 4, 1519–1543. [Google Scholar]
- Horcher, A.; Visser, R.J. Unmanned Aerial Vehicles: Applications for Natural Resource Management and Monitoring. In Proceedings of the Council on Forest Engineering Proceedings 2004: Machines and People, The Interface, Hot Springs, AR, USA, 27–30 April 2004.
- Koh, L.P.; Wich, S.A. Dawn of Drone Ecology: Low-Cost Autonomous Aerial Vehicles for Conservation. Trop. Conserv. Sci. 2012, 5, 121–132. [Google Scholar]
- A good source of drone/UAV news is the GIM periodical (http://www.gim-international.com/). Other sources include commercial websites that offer mapping services using drones (which we do not identify to avoid favoring any particular company) and websites of university research teams concerned with the development and use of drones for environmental issues. YouTube is also an excellent source of information.
- Further information can be found in the Internet on websites such as http://conservationdrones.org/, http://rhino-uav.org/, http://www.iapf.org/en/campaigns/iapfdrone, http://wwf.panda.org/?206154/ nepal-tests-new-unmanned-aerial-vehicle-technology-to-stop-wildlife-crime.
- Payload refers to the carrying capacity of the aircraft, measured in terms of weight, and includes the equipment it carries (batteries, cameras, data logger, etc.).
- Everaerts, J. The Use of Unmanned Aerial Vehicles (UAVs) for Remote Sensing and Mapping. In Proceedings of the XXI ISPRS Congress, Beijing, China, 3–11 July 2008; ISPRS—International Society for Photogrammetry and Remote Sensing: Beijing, China, 2008; pp. 1187–1191. [Google Scholar]
- It is important to note that while most environmental applications presently use small drones, there is a trade-off between the size of the drone and the accuracy of the data that it can collect.
- However, we are aware of instances where such drones have covered up to 50 ha, so they may serve in small forest communities.
- Vertical landing is also advantageous because the lower speed inherent to this type of landing reduces the likelihood of the equipment suffering impact damages.
- Note, however, that many of the publications cited in this paper have not used small, fixed-wing aircraft.
- Most probably the partner organizations and forest data end-users would be government agencies, environmental or development NGOs, and research teams. Note that partner organizations would not necessarily be data end-users and also that community members might also, in certain instances, become data end-users.
- We believe that the approach which we envisage for the entire process of implementing CBFM assisted by small drones is the most feasible and desirable in the short-term, particularly given current constraints. However, we expect that as technology becomes easier to use and forest monitoring decentralization advances, forest communities could undertake all the necessary processing tasks without the assistance of partner organizations. This premise might also be valid for drone repairs and maintenance in certain cases, but this technological diffusion will be likely be slower and more problematic.
- Importantly, partner organizations and governments could use this spatial information to produce highly accurate maps of forest cover change. Moreover, coupled with community local knowledge of the main drivers of such forest change, the quality of data obtained from communities would far exceed what is feasible to achieve without their participation, and would be much more detailed than the requirements of the highest reporting level of the IPCC (i.e. tier 3).
- Lynch, J.; Maslin, M.; Balzter, H.; Sweeting, M. Choose Satellites to Monitor Deforestation. Nature 2013, 496, 293–294. [Google Scholar] [CrossRef]
- Quesada, M.; Sanchez-Azofeifa, G.A.; Alvarez-Añorve, M.; Stoner, K.E.; Avila-Cabadilla, L.; Calvo-Alvarado, J.; Castillo, A.; Espírito-Santo, M.M.; Fagundes, M.; Fernandes, G.W.; et al. Succession and Management of Tropical Dry Forests in the Americas: Review and New Perspectives. For. Ecol. Manag. 2009, 258, 1014–1024. [Google Scholar] [CrossRef]
- Birdsey, R.; Angeles-Perez, G.; Kurz, W.A.; Lister, A.; Olguin, M.; Pan, Y.; Wayson, C.; Wilson, B.; Johnson, K. Approaches to Monitoring Changes in Carbon Stocks for REDD+. Carbon Manag. 2013, 4, 519–537. [Google Scholar] [CrossRef]
- Note that these images would be georeferenced but not orthorectified, which would entail further, more technical processing, that might be needed by certain end-users but not the communities.
- ConservationDrones. Available online: http://conservationdrones.org (accessed on 12 October 2013).
- Engineering.com. Available online: http://www.engineering.com/3DPrinting/3DPrintingArticles/ArticleID/5965/3D-Printed-Surveillance-Drone-Takes-Flight.aspx (accessed on 12 October 2013).
- 3D printer and 3D printer news. Available online: http://www.3ders.org/articles/20130607-french-drone-maker-uses-3d-printers-to-prototype-uav-parts.html (accessed on 12 October 2013).
- NewScientist. Available online: http://www.newscientist.com/article/dn20737-3d-printing-the-worlds-first-printed-plane.html (accessed on 12 October 2013).
- Reyes-García, V.; Ledezma, J.C.; Paneque-Gálvez, J.; Orta, M.; Gueze, M.; Lobo, A.; Guinart, D.; Luz, A.C. Presence and Purpose of Nonindigenous Peoples on Indigenous Lands: A Descriptive Account from the Bolivian Lowlands. Soc. Nat. Resour. 2012, 25, 270–284. [Google Scholar] [CrossRef]
- As long as they complied with a previously established minimum number of annual surveys.
- Note that at equal camera sensor size and focal length, the lower the flight altitude, the higher the spatial resolution of the imagery acquired (i.e. the smaller the pixel size). Currently, small drones can acquire imagery at a spatial resolution of even 1–2 cm per pixel side (e.g., 2.2 cm flying at 100 m above the ground using a camera with a sensor size of 6.17 × 4.55 mm and a focal length of 6.9 cm; see for instance [80]).
- Rango, A.; Laliberte, A.S. Impact of Flight Regulations on Effective Use of Unmanned Aircraft Systems for Natural Resources Applications. J. Appl. Remote Sens. 2010, 4. [Google Scholar] [CrossRef]
- Reyes-García, V.; Guèze, M.; Luz, A.C.; Paneque-Gálvez, J.; Macía, M.J.; Orta-Martínez, M.; Pino, J.; Rubio-Campillo, X. Evidence of Traditional Knowledge Loss Among a Contemporary Indigenous Society. Evol. Hum. Behav. 2013, 34, 249–257. [Google Scholar] [CrossRef]
- Nevertheless, there would be little difference in this regard between a drone-assisted CBFM approach and one based solely on community ground surveys, as either approach would entail the introduction of technology and foreign practices and a subsequent cultural change (even if minor).
- Pearson, T.R.H.; Brown, S.; Casarim, F.M. Carbon Emissions from Tropical Forest Degradation Caused by Logging. Environ. Res. Lett. 2014, 9. [Google Scholar] [CrossRef]
- Mertz, O.; Müller, D.; Sikor, T.; Hett, C.; Heinimann, A.; Castella, J.-C.; Lestrelin, G.; Ryan, C.M.; Reay, D.S.; Schmidt-Vogt, D.; et al. The Forgotten D: Challenges of Addressing Forest Degradation in Complex Mosaic Landscapes under REDD+. Geogr. Tidsskr.-Dan. J. Geogr. 2012, 112, 63–76. [Google Scholar] [CrossRef]
- Mitchard, E.T.A.; Feldpausch, T.R.; Brienen, R.J.W.; Lopez-Gonzalez, G.; Monteagudo, A.; Baker, T.R.; Lewis, S.L.; Lloyd, J.; Quesada, C.A.; Gloor, M.; et al. Markedly Divergent Estimates of Amazon Forest Carbon Density from Ground Plots and Satellites. Glob. Ecol. Biogeogr. 2014. [Google Scholar] [CrossRef]
- Phelps, J.; Webb, E.L.; Agrawal, A. Does REDD+ Threaten to Recentralize Forest Governance? Science 2010, 328, 312–313. [Google Scholar] [CrossRef]
- We already know of cases in Latin America where indigenous peoples are interested in finding out about the feasibility of using drones in their territories. In these cases, we posit that as long as communities are politically organized and have leaders who already collaborate with academia, NGOs or government agencies, the negotiation for the implementation of a drone-assisted CBFM might be feasible.
- Setyowati, A. Ensuring That Women Benefit from REDD+. Unasylva (FAO) 2012, 63, 57–62. [Google Scholar]
- Peach Brown, H.C. Gender, Climate Change and REDD+ in the Congo Basin Forests of Central Africa. Int. For. Rev. 2011, 13, 163–176. [Google Scholar]
- We do not think more than two weeks would be needed, even for community members failing to meet the two main criteria for selection (computer-literacy and experience in forest management), particularly if drones are to be used with an autopilot system (i.e., in automatic or semi-automatic flight mode). This issue, however, requires further investigation.
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Paneque-Gálvez, J.; McCall, M.K.; Napoletano, B.M.; Wich, S.A.; Koh, L.P. Small Drones for Community-Based Forest Monitoring: An Assessment of Their Feasibility and Potential in Tropical Areas. Forests 2014, 5, 1481-1507. https://doi.org/10.3390/f5061481
Paneque-Gálvez J, McCall MK, Napoletano BM, Wich SA, Koh LP. Small Drones for Community-Based Forest Monitoring: An Assessment of Their Feasibility and Potential in Tropical Areas. Forests. 2014; 5(6):1481-1507. https://doi.org/10.3390/f5061481
Chicago/Turabian StylePaneque-Gálvez, Jaime, Michael K. McCall, Brian M. Napoletano, Serge A. Wich, and Lian Pin Koh. 2014. "Small Drones for Community-Based Forest Monitoring: An Assessment of Their Feasibility and Potential in Tropical Areas" Forests 5, no. 6: 1481-1507. https://doi.org/10.3390/f5061481
APA StylePaneque-Gálvez, J., McCall, M. K., Napoletano, B. M., Wich, S. A., & Koh, L. P. (2014). Small Drones for Community-Based Forest Monitoring: An Assessment of Their Feasibility and Potential in Tropical Areas. Forests, 5(6), 1481-1507. https://doi.org/10.3390/f5061481