Thermally Activated Composite with Two-Way and Multi-Shape Memory Effects

Abstract
:1. Introduction
2. Materials and Experimental Techniques
2.1. Description of the Composites Plates
2.2. Experimental Equipment
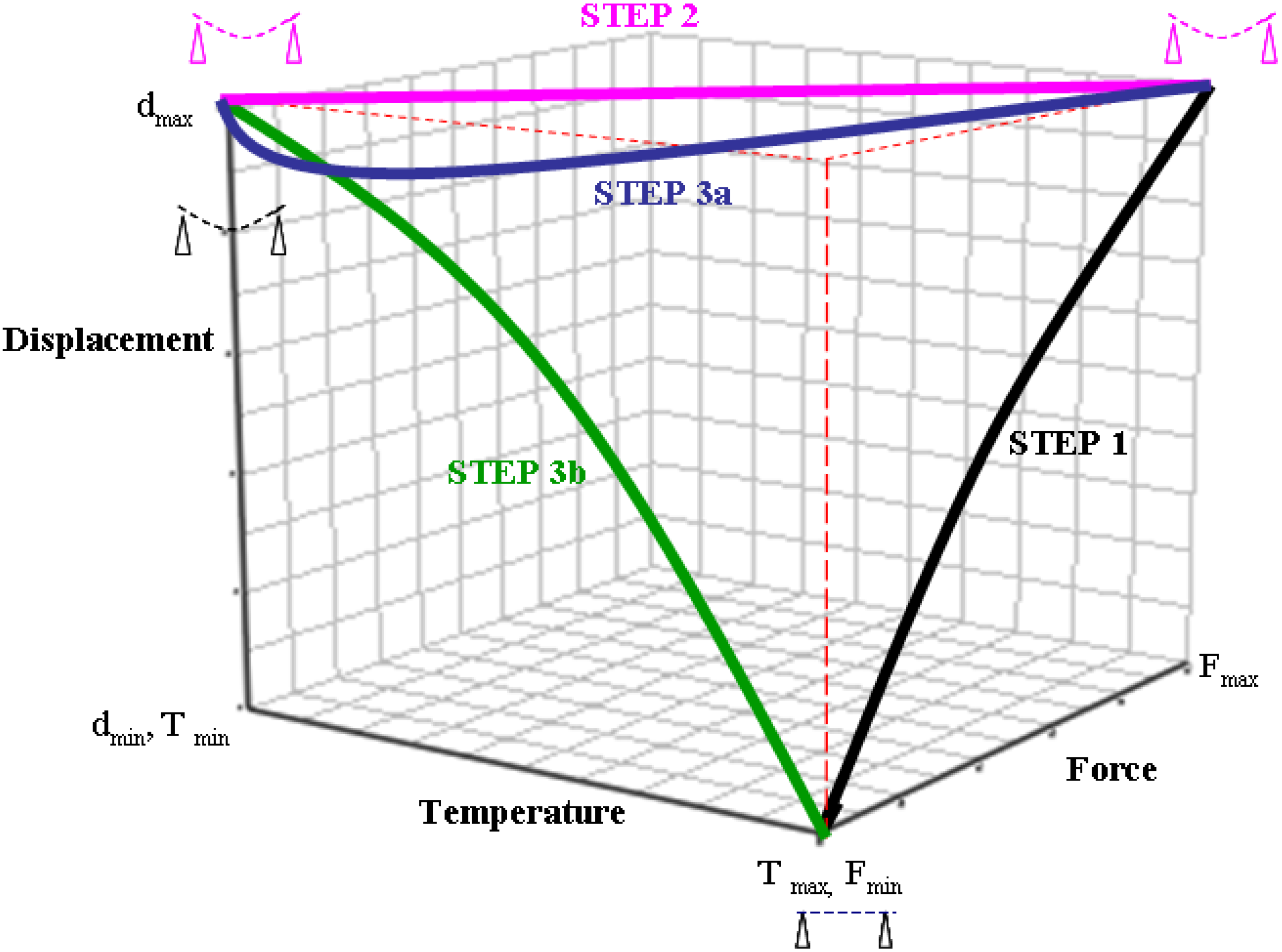
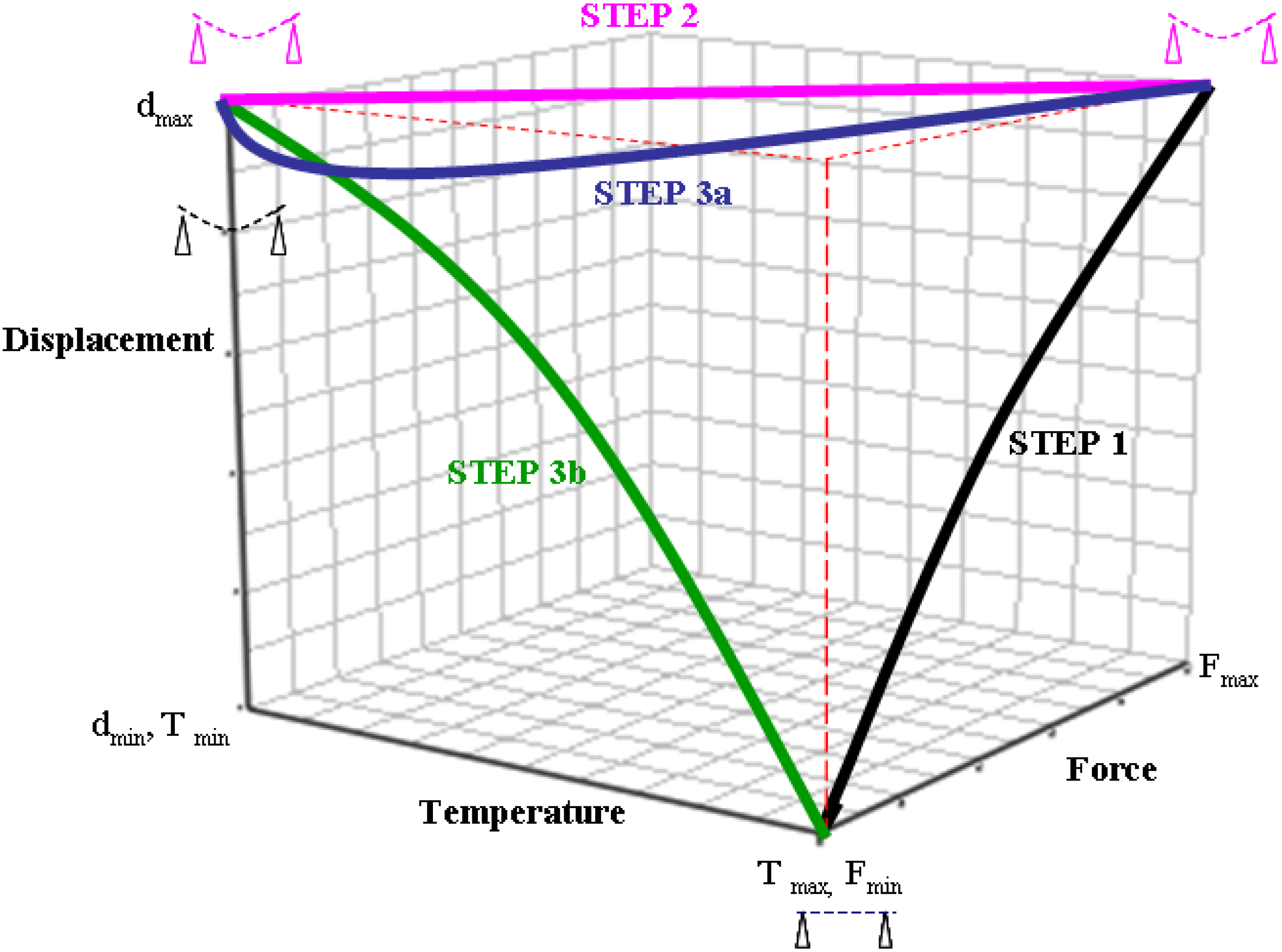
2.3. Thermo-Mechanical Programming Cycle


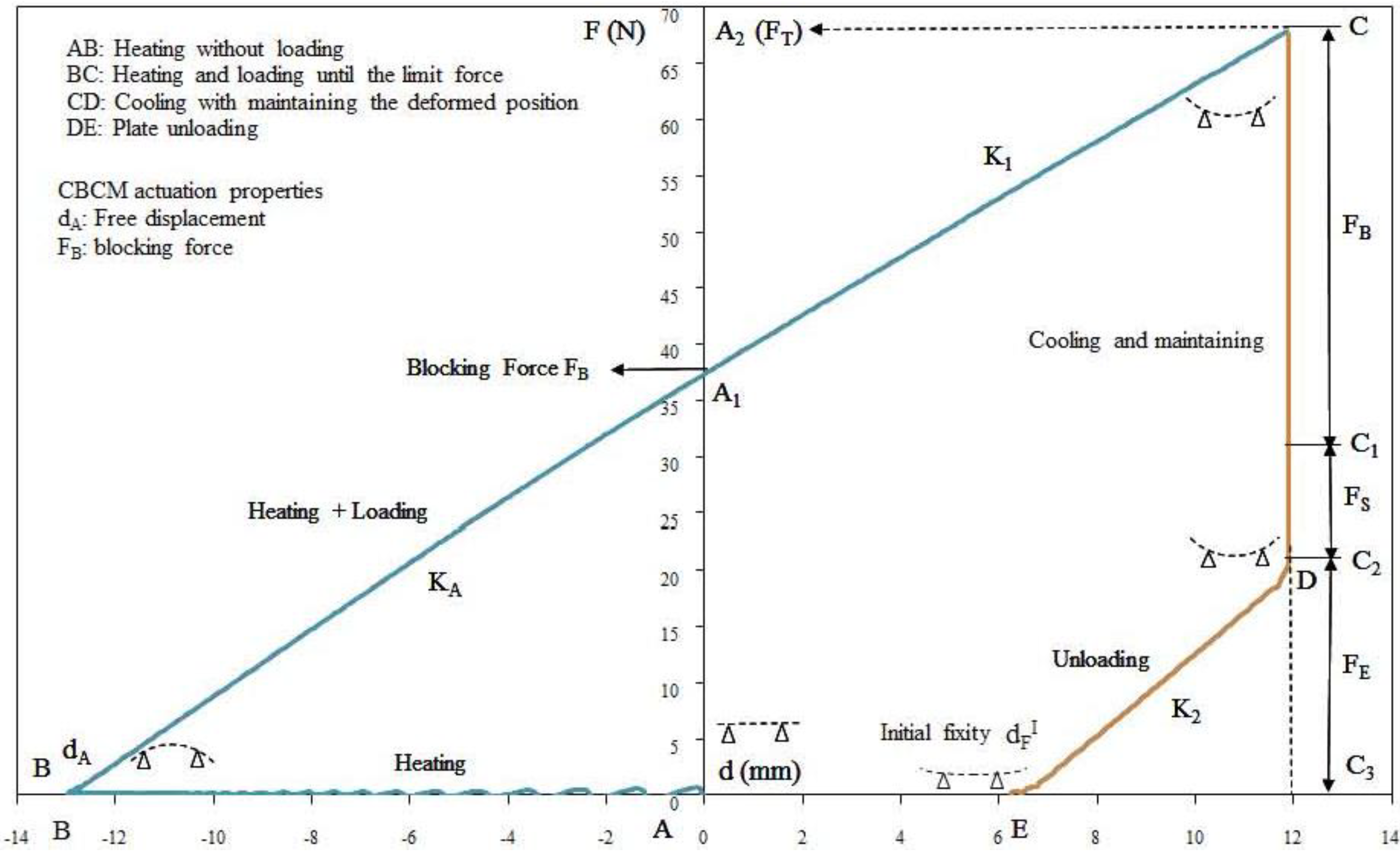
2.4. Recovery Cycle
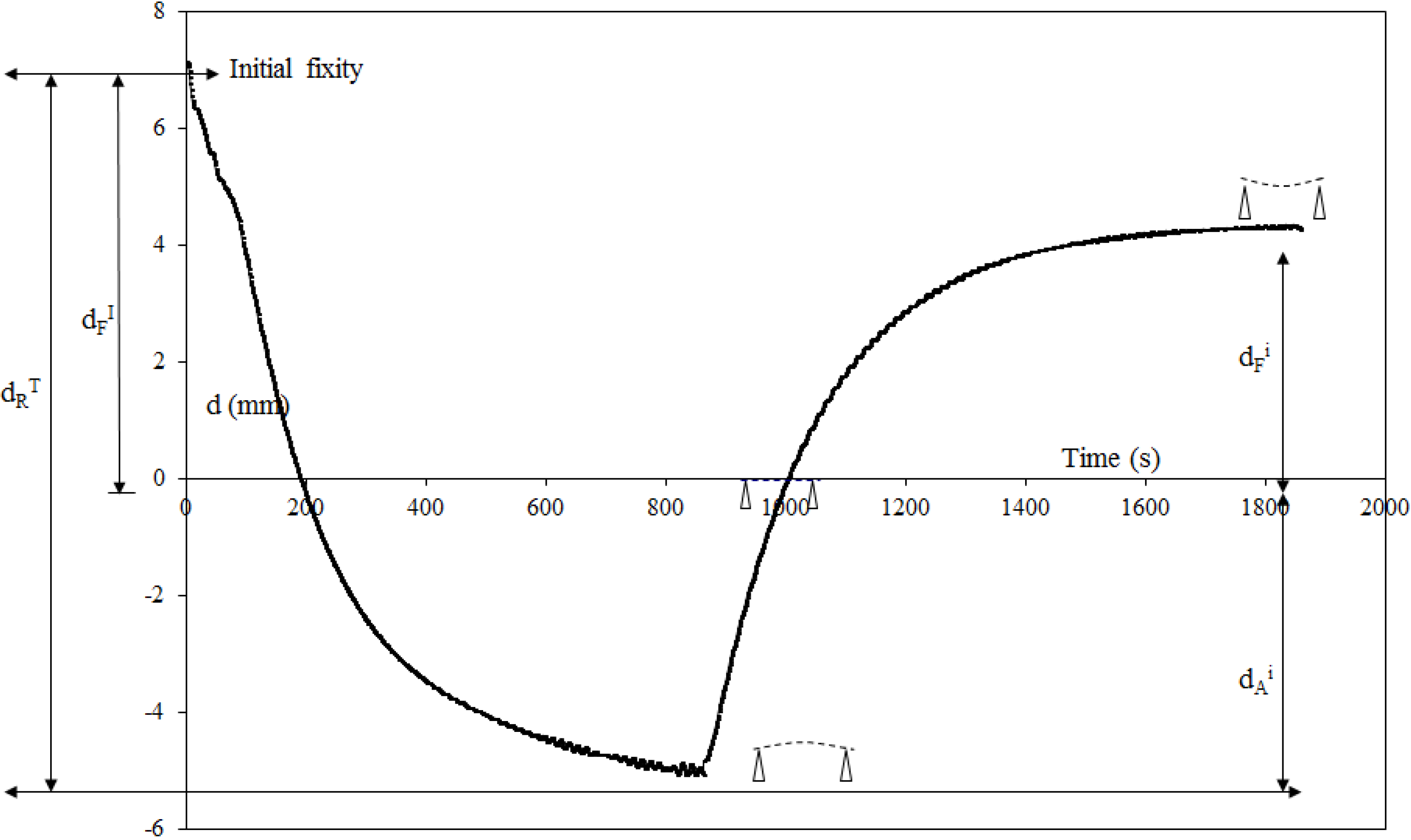
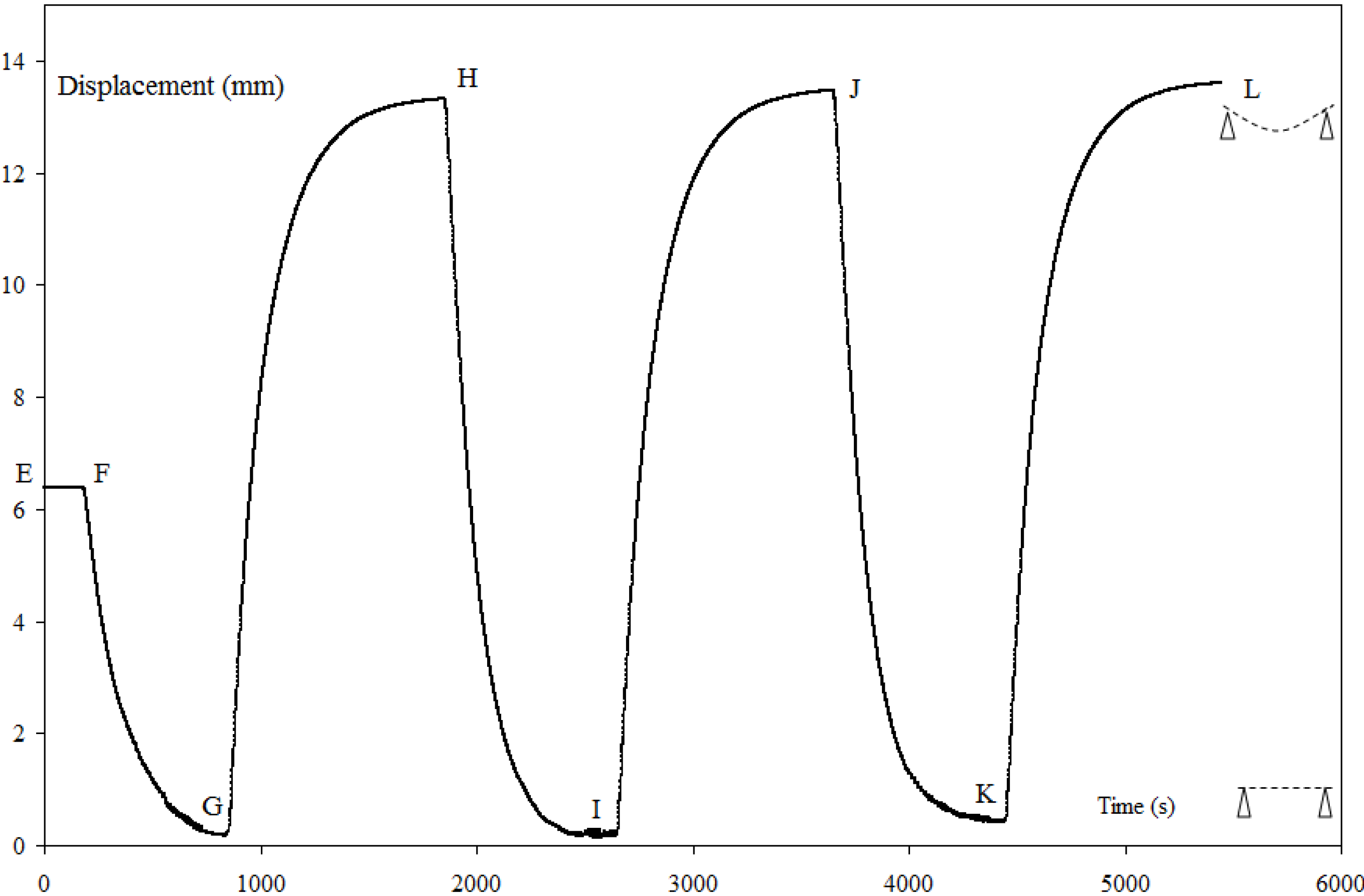
2.4.1. Unconstrained Recovery Cycle
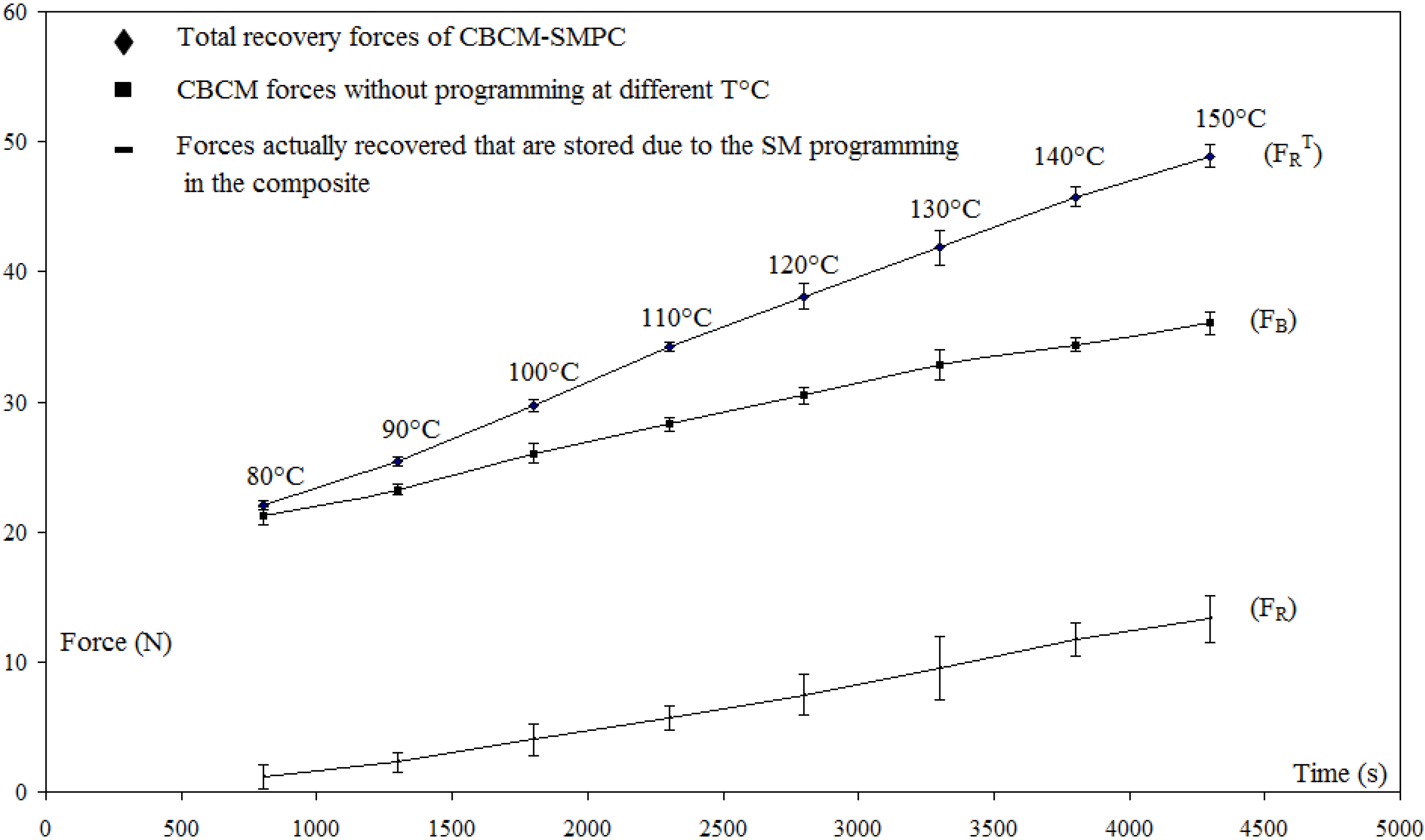
2.4.2. Constrained Recovery Cycle
2.4.3. Recovery under Load
3. Results and Discussions
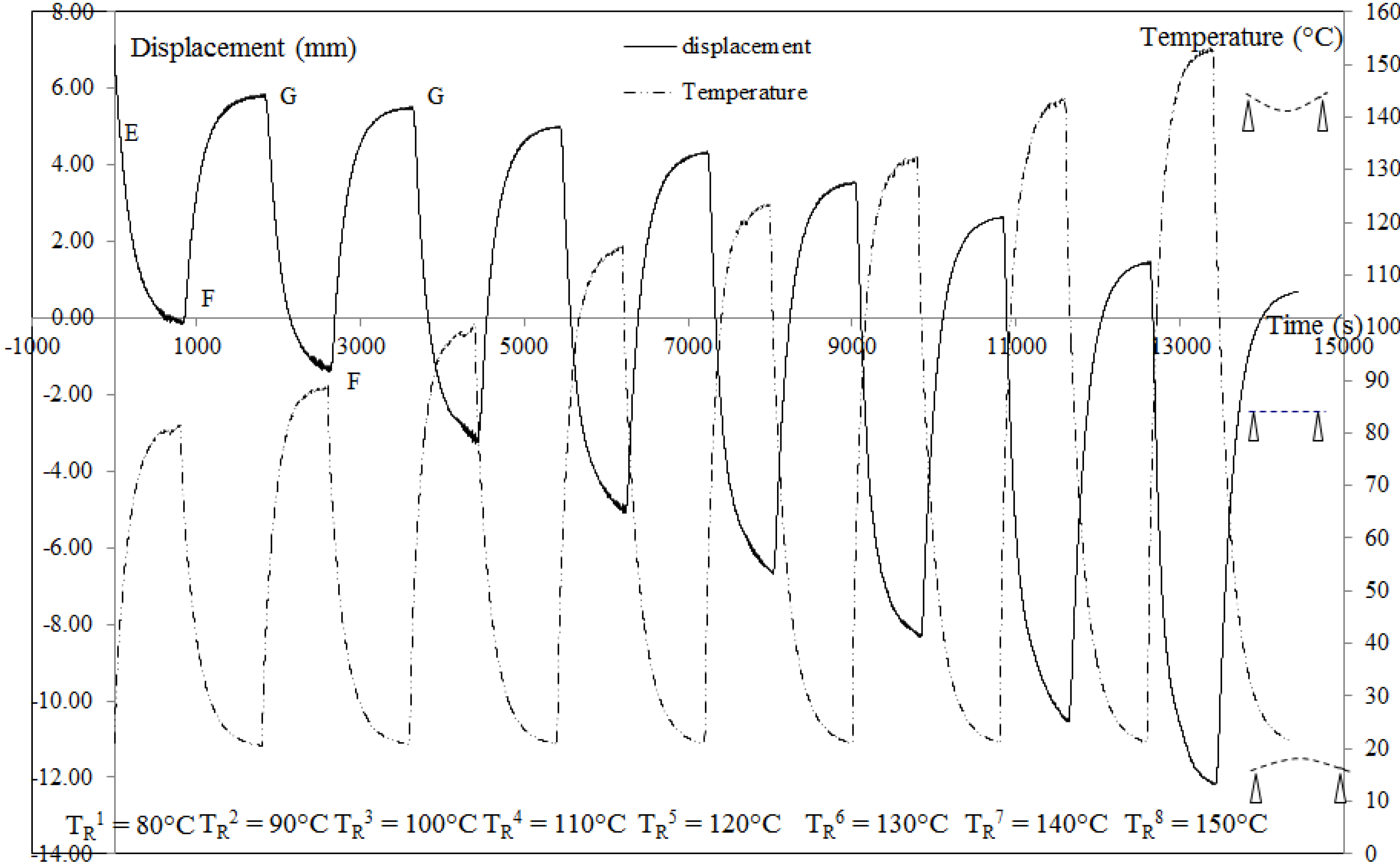
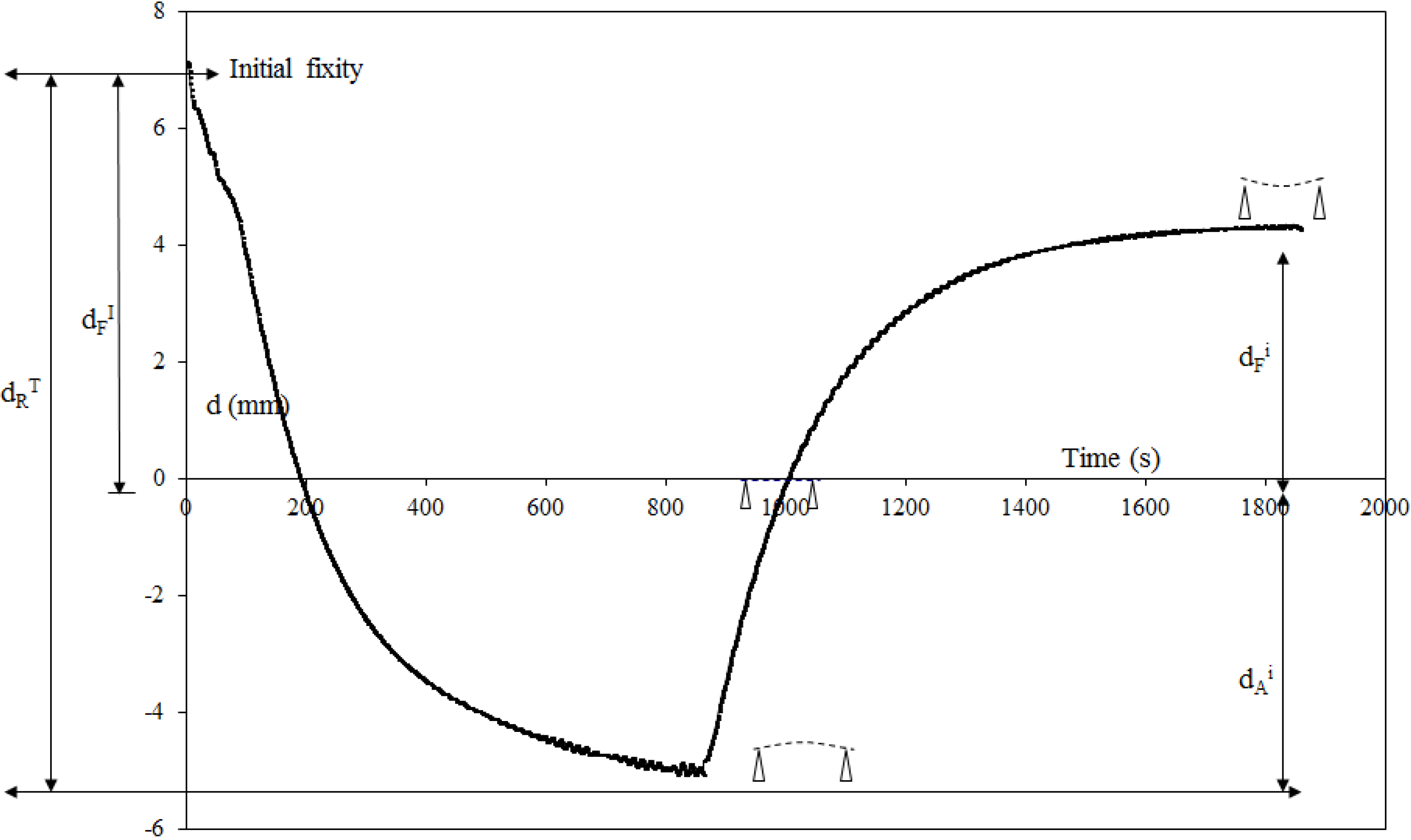
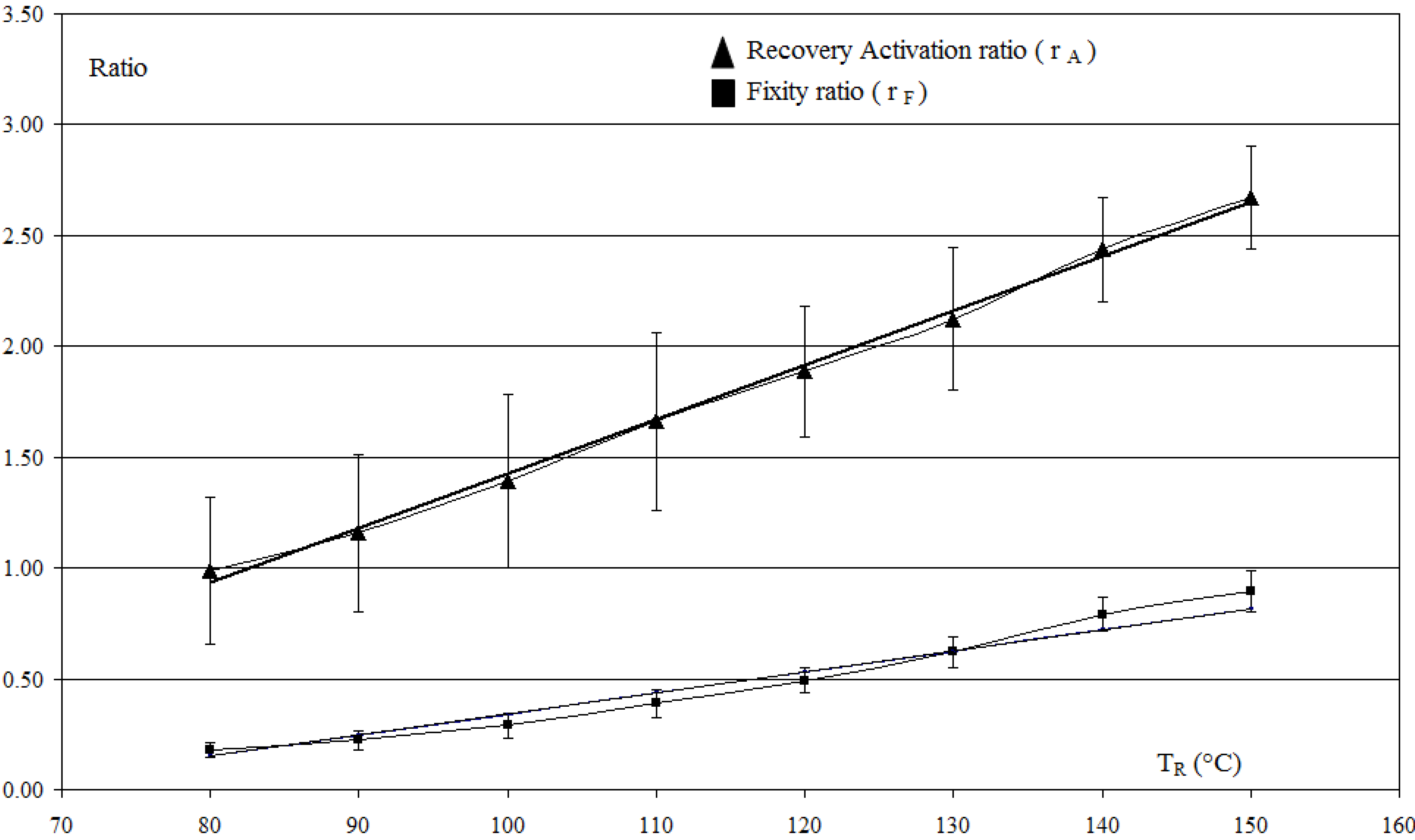
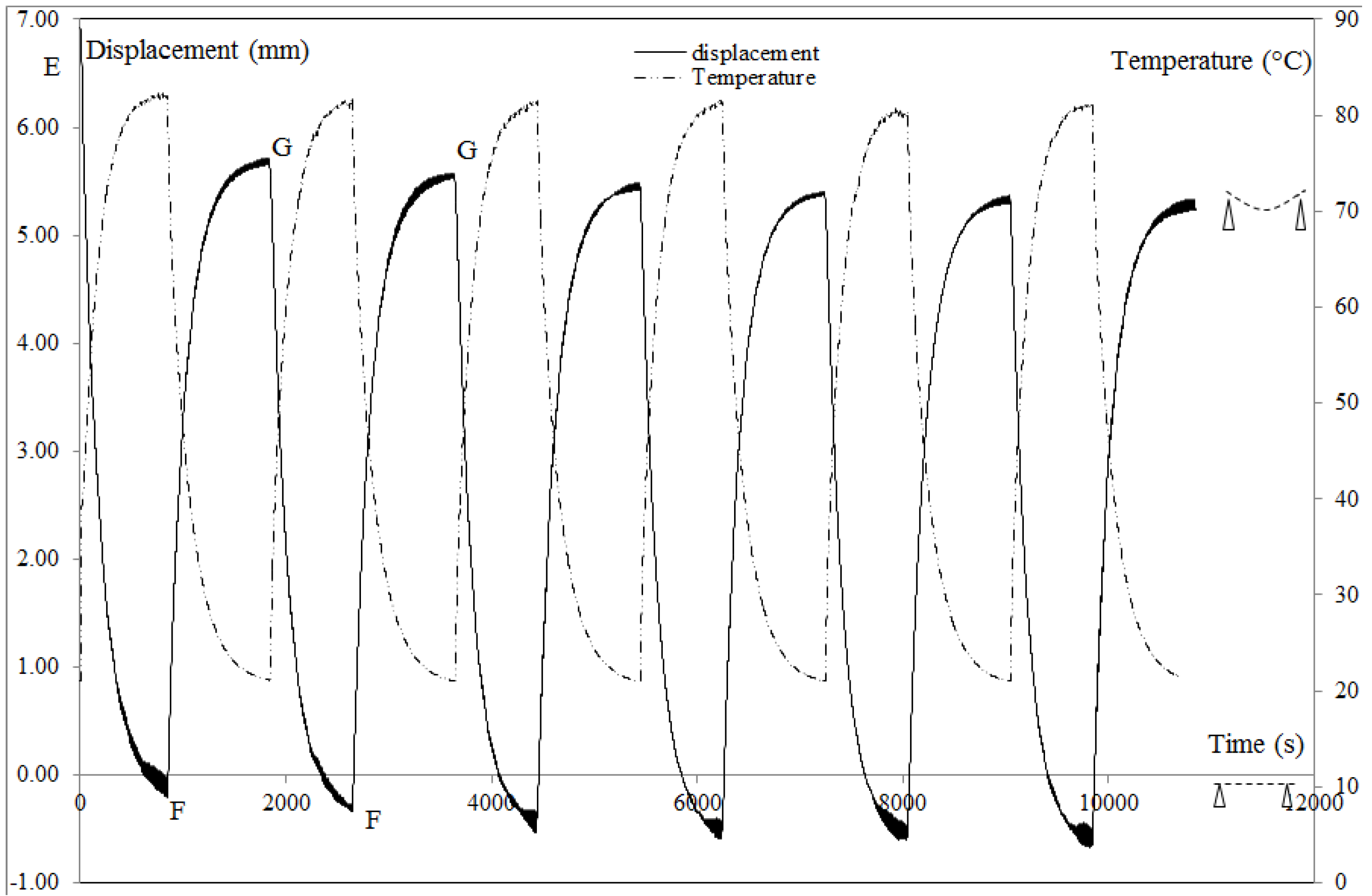
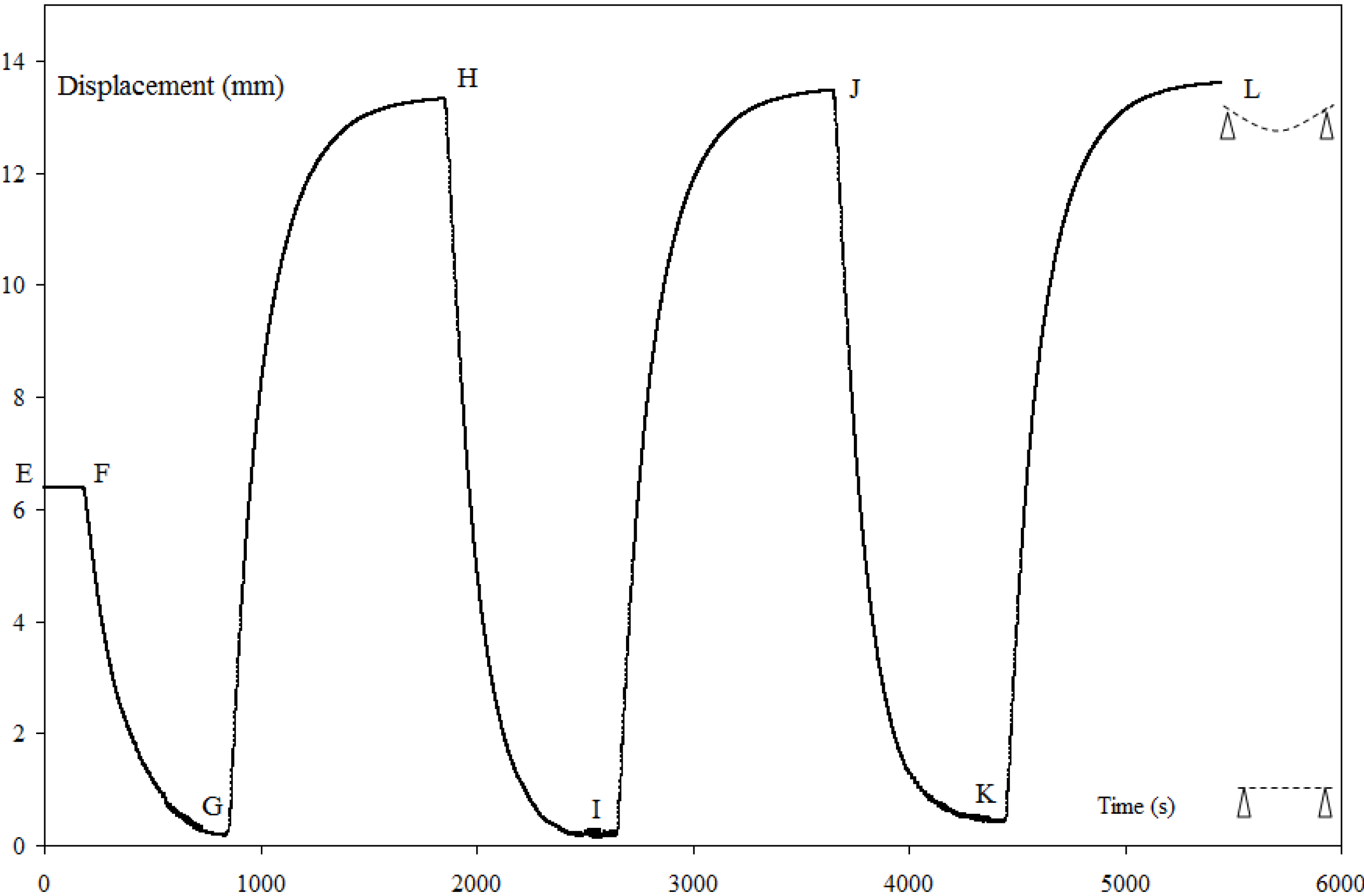
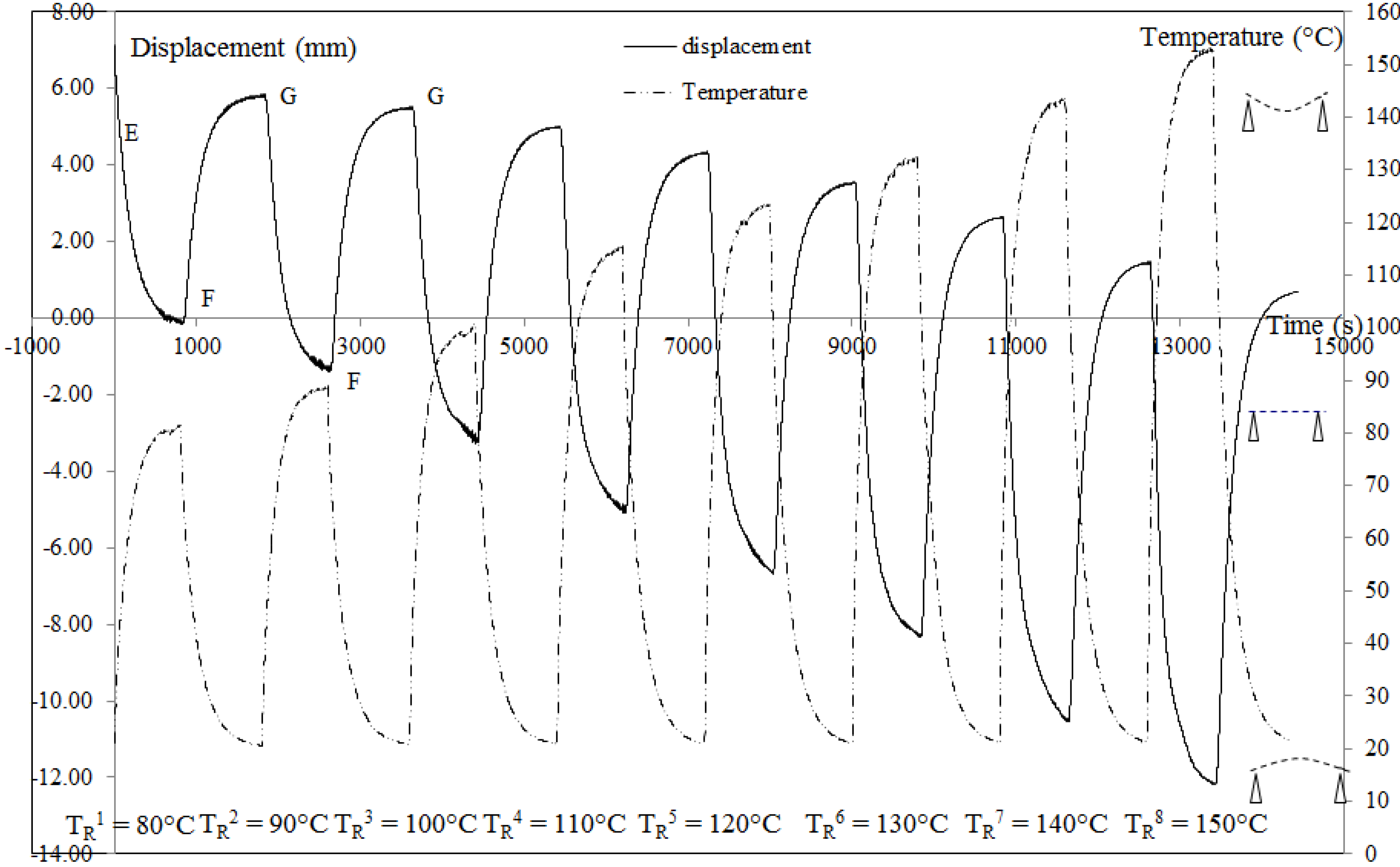
3.1. Unconstrained Recovery Cycle with 2W-SME

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TR (°C) | 80 | 90 | 100 | 110 | 120 | 130 | 140 | 150 |
|---|---|---|---|---|---|---|---|---|
| εF (%) | 1.99 ± 0.31 | 1.89 ± 0.33 | 1.73 ± 0.34 | 1.48 ± 0.33 | 1.23 ± 0.28 | 0.92 ± 0.92 | 0.51 ± 0.51 | 0.25 ± 0.26 |
| εA (%) | 0.03 ± 0.33 | −0.39 ± 0.36 | −0.95 ± 0.39 | −1.60 ± 0.4 | −2.15 ± 0.3 | −2.72 ± 0.32 | −3.49 ± 0.24 | −4.06 ± 0.23 |
| = − εA | 2.40 | 2.82 | 3.38 | 4.03 | 4.58 | 5.15 | 5.92 | 6.49 |
| εdA | −2.14 ± 0.15 | −2.41 ± 0.21 | −2.82 ± 0.27 | −3.2 ± 0.11 | −3.47 ± 0.15 | −3.71 ± 0.11 | −3.99 ± 0.12 | −4.31 ± 0.08 |
| εR = − |εdA| | 0.26 | 0.41 | 0.56 | 0.83 | 1.11 | 1.44 | 1.93 | 2.18 |

| TR (°C) | 80 | 90 | ||||
|---|---|---|---|---|---|---|
| cycles | 1 | 2 | 3 | 1 | 2 | 3 |
| εF (%) | 1.67 ± 0.13 | 1.62 ± 0.14 | 1.57 ± 0.14 | 1.49 ± 0.14 | 1.45 ± 0.14 | 1.41 ± 0.14 |
| εA (%) | −0.21 ± 0.17 | −0.29 ± 0.17 | −0.38 ± 0.16 | −0.81 ± 0.17 | −0.87 ± 0.18 | −0.89 ± 0.14 |
| δε = (εF − εΑ) | 1.88 | 1.91 | 1.95 | 2.30 | 2.32 | 2.30 |

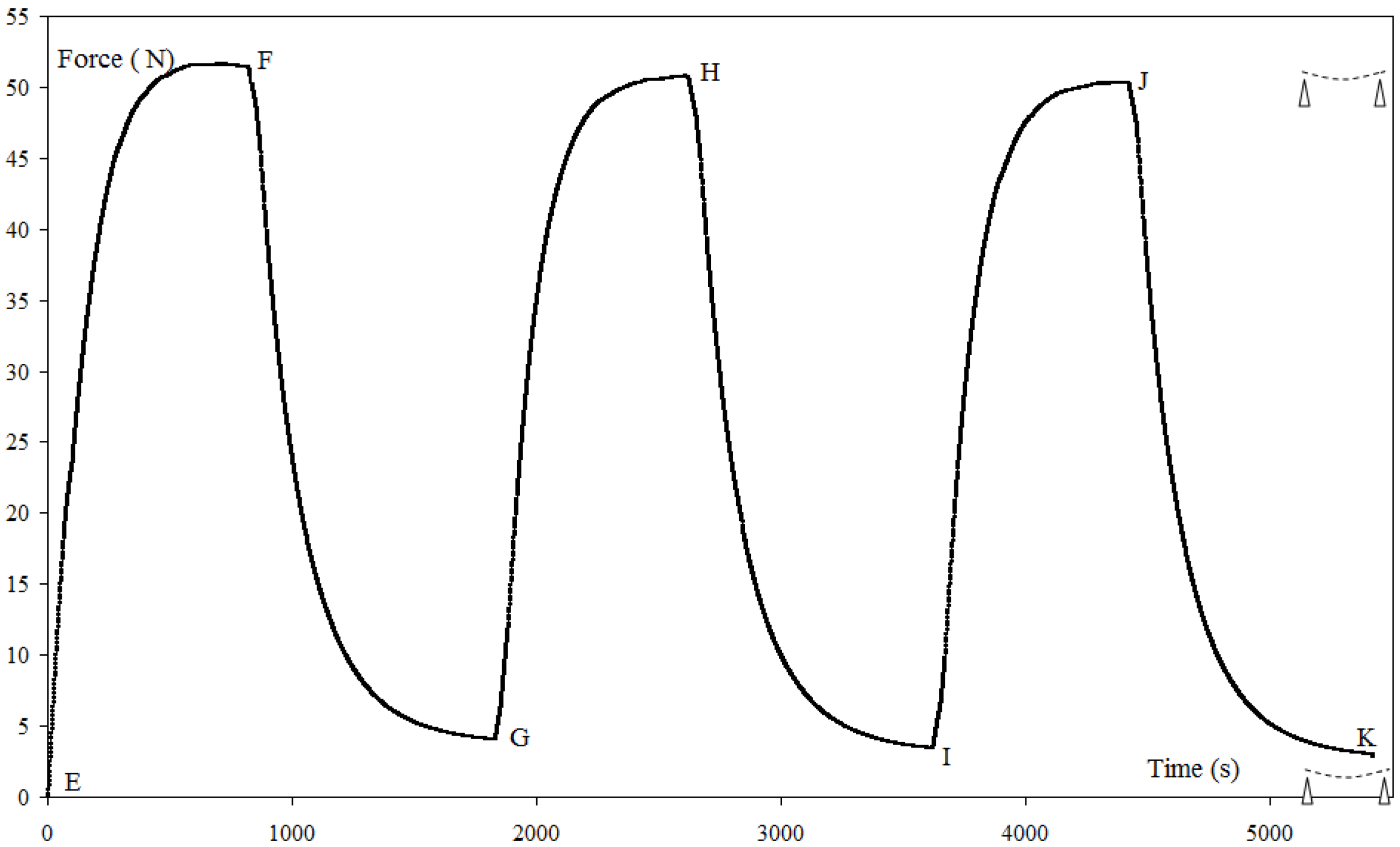
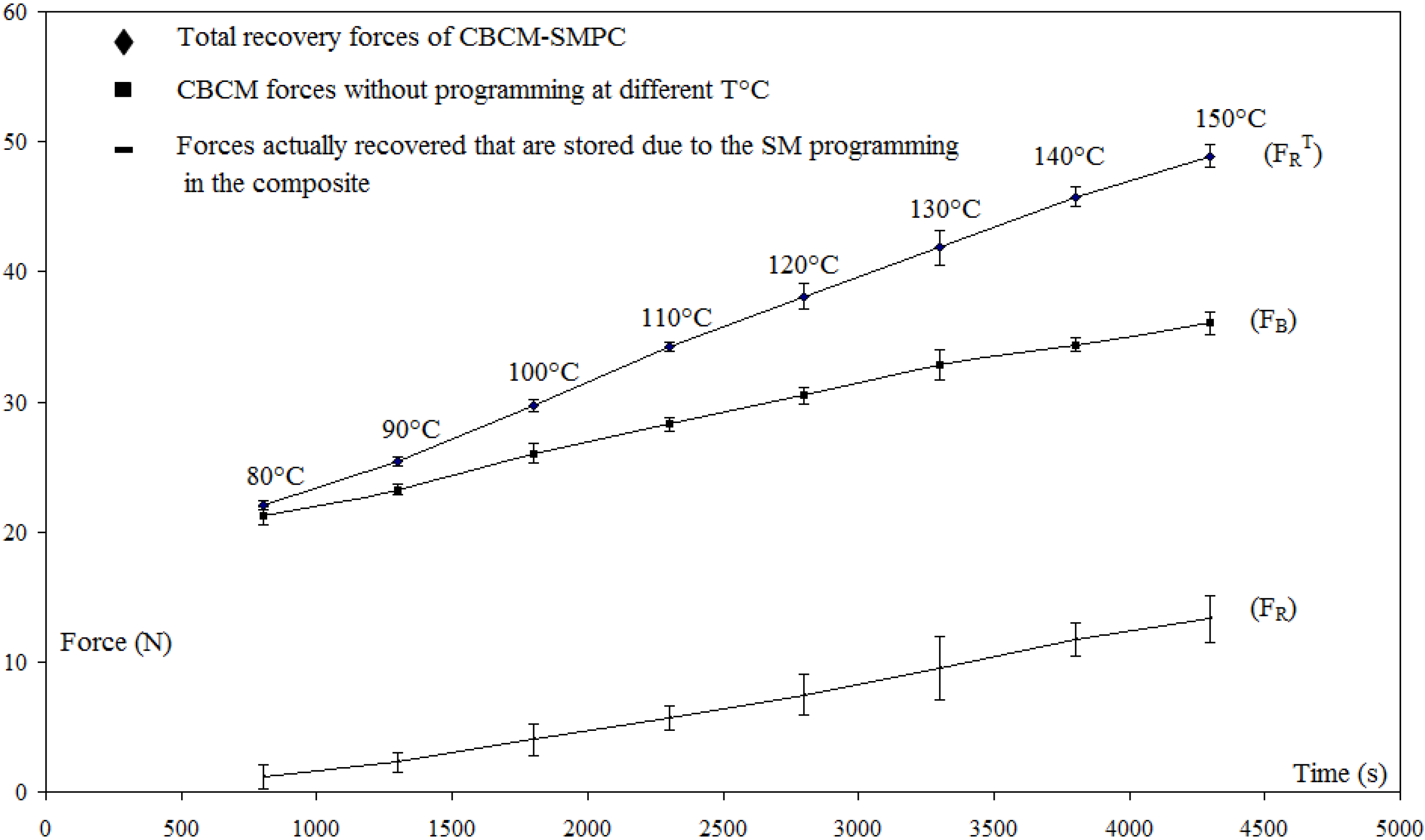
3.2. Constrained Recovery with 2W-SME

3.3. Recovery Under Load with 2W-SME
| Recovery cycles | cycle 1 | cycle 2 | cycle 3 |
|---|---|---|---|
| εF (%) | 4.44 ± 0.19 | 4.49 ± 0.20 | 4.53 ± 0.21 |
| εA (%) | 0.21 ± 0.17 | 0.27 ± 0.17 | 0.29 ± 0.21 |
| δε = │εF − εΑ│ | 4.23 | 4.22 | 4.24 |
4. Conclusions
References
- Meng, Q.H.; Hu, J.L. A review of shape memory polymer composites and blends. Compos. A Appl. Sci. Manuf. 2009, 40, 1661–1672. [Google Scholar] [CrossRef]
- Hu, J.L.; Zhu, Y.; Huang, H.H.; Lu, J. Recent advances in shape-memory polymers: Structure, mechanism, functionality, modeling and applications. Prog. Polym. Sci. 2012, 37, 1720–1763. [Google Scholar] [CrossRef]
- Razzaq, M.Y.; Anhalt, M.; Frormann, L.; Weidenfeller, B. Mechanical spectroscopy of magnetite filled polyurethane shape memory polymers. Mater. Sci. Eng. A 2007, 471, 57–62. [Google Scholar] [CrossRef]
- Razzaq, M.Y.; Anhalt, M.; Frormann, L.; Weidenfeller, B. Thermal, electrical and magnetic studies of magnetite filled polyurethane shape memory polymers. Mater. Sci. Eng. A 2007, 444, 227–235. [Google Scholar] [CrossRef]
- Sun, L.; Huang, W.M.; Ding, Z.; Zhao, Y.; Wang, C.C.; Purnawali, H. Stimulus-responsive shape memory materials: A review. Mater. Des. 2012, 33, 577–640. [Google Scholar] [CrossRef]
- Xu, T.; Li, G. A shape memory polymer based syntactic foam with negative Poisson’s ratio. Mater. Sci. Eng. A 2011, 528, 6804–6811. [Google Scholar] [CrossRef]
- Zhang, C.S.; Ni, Q.Q. Bending behavior of shape memory polymer based laminates. Compos. Struct. 2007, 78, 153–161. [Google Scholar] [CrossRef]
- Tobushi, H.; Hayashi, S.; Hoshio, K.; Ejiri, Y. Shape recovery and irrecoverable strain control in polyurethane shape-memory polymer. Sci. Technol. Adv. Mater. 2008, 9, 015009. [Google Scholar] [CrossRef]
- Ohki, T.; Ni, Q.Q.; Ohsako, N.; Iwamoto, M. Mechanical and shape memory behavior of composites with shape memory polymer. Compos. A 2004, 35, 1065–1073. [Google Scholar] [CrossRef]
- Behl, M.; Lendlein, A. Shape-memory polymers. Mater. Today 2007, 10, 20–28. [Google Scholar] [CrossRef]
- Rezanejad, S.; Kokabi, M. Shape memory and mechanical properties of cross-linked polyethylene/clay nanocomposites. Eur. Polym. J. 2007, 43, 2856–2865. [Google Scholar] [CrossRef]
- Liu, Y.; Gall, K.; Dunn, M.L.; McCluskey, P. Thermomechanics of shape memory polymer nanocomposites. Mech. Mater. 2004, 36, 929–940. [Google Scholar] [CrossRef]
- Westbrook, K.K.; Mather, P.T.; Parakh, V.; Dunn, M.L.; Ge, Q.; Lee, B.M. Two-way reversible shape memory effects in a free-standing polymer composite. Smart Mater. Struct. 2011, 20, 065010:1–065010:6. [Google Scholar] [CrossRef]
- Donnio, B.; Wermter, H.; Finkelmann, H. A simple and versatile synthetic route for the preparation of main-chain, liquid-crystalline elastomers. Macromolecules 2000, 33, 7724–7729. [Google Scholar] [CrossRef]
- Ikeda, T.; Nakano, M.; Yu, Y.; Tsutsumi, O.; Kanazawa, A. Anisotropic bending and unbending behavior of azobenzene liquid-crystalline gels by light exposure. Adv. Mater. 2003, 15, 201–205. [Google Scholar] [CrossRef]
- Li, M.H.; Keller, P.; Li, B.; Wang, X.; Brunet, M. Light-driven side-on nematic elastomer actuators. Adv. Mater. 2003, 15, 569–572. [Google Scholar] [CrossRef]
- Chung, T.; Romo-Uribe, A.; Mather, P.T. Two-way reversible shape memory in a semicrystalline network. Macromolecules 2007, 41, 184–192. [Google Scholar] [CrossRef]
- Westbrook, K.K.; Parakh, V.; Chung, T.; Mather, P.T.; Wan, L.C.; Dunn, M.L. Constitutive modeling of shape memory effects in semicrystalline polymers with stretch induced crystallization. J. Eng. Mater. Technol. 2010, 132, 041010:1–041010:9. [Google Scholar] [CrossRef]
- Tamagawa, H. Thermo-responsive two-way shape changeable polymeric laminate. Mater. Lett. 2010, 64, 749–751. [Google Scholar] [CrossRef]
- Chen, S.; Hu, J.; Zhuo, H. Properties and mechanism of two-way shape memory polyurethane composites. Compos. Sci. Technol. 2010, 70, 1437–1443. [Google Scholar] [CrossRef]
- Chen, S.; Hu, J.; Zhuo, H.; Zhu, Y. Two-way shape memory effect in polymer laminates. Mater. Lett. 2008, 62, 4088–4090. [Google Scholar] [CrossRef]
- Tobushi, H.; Hayashi, S.; Sugimoto, Y.; Date, K. Two-way bending properties of shape memory composite with SMA and SMP. Materials 2009, 2, 1180–1192. [Google Scholar] [CrossRef]
- Tobushi, H.; Hayashi, S.; Pieczyska, E.; Date, K.; Nishimura, Y. Three-way actuation of shape memory composite. Arch. Mech. 2011, 63, 443–457. [Google Scholar]
- Tobushi, H.; Hayashi, S.; Sugimoto, Y.; Date, K. Performance of shape memory composite with SMA and SMP. Solid State Phenom. 2009, 154, 65–70. [Google Scholar] [CrossRef]
- Tobushi, H.; Miyamoto, K.; Nishimura, Y.; Mitsui, K. Novel shape memory actuators. Theor. Appl. Mech. 2011, 49, 927–943. [Google Scholar]
- Mertmann, M.; Hornbogen, E.; Escher, K. Developpment of a robotic gripper based ona NiTi-silicone composite material with integrated sensing function. Shap. Mem. Mater. 1994, 94, 556–560. [Google Scholar]
- Mertmann, M.; Hornbogen, E. Grippers for the micro assembly containing shape memory actuators and sensors. J. Phys. IV France 1997, 7. [Google Scholar] [CrossRef]
- Escher, K.; Hornbogen, E.; Mertmann, M. The two-way effect in homogeneous alloys and composites for robotic applications. In Proceedings of International Conference on Martensitic Transformations ICOMAT-92, Monterey, CA, USA, 20–24 July 1992; pp. 1289–1294.
- Neuking, K.; Abu-Zarifa, A.; Youcheu-Kemtchou, S.; Eggeler, G. Polymer/NiTi-composites: Fundamental aspects, processing and properties. Adv. Eng. Mater. 2005, 7, 1014–1023. [Google Scholar] [CrossRef]
- Gautier, K.B.; L’Hostis, G.; Laurent, F.; Durand, B. Mechanical performances of a thermal activated composite. Compos. Sci. Technol. 2009, 69, 2633–2639. [Google Scholar] [CrossRef]
- Drobez, H. A new active composite. Smart Mater. Struct. 2009, 18, 025020:1–025020:2. [Google Scholar] [CrossRef]
- Xie, T. Tunable polymer multi-shape memory effect. Nature 2010, 464, 267–270. [Google Scholar] [CrossRef] [PubMed]
- Basit, A.; L'Hostis, G.; Durand, B. Multi-shape memory effect in shape memory polymer composites. Mater. Lett. 2012, 74, 220–222. [Google Scholar] [CrossRef]
- Song, W.B.; Wang, L.Y.; Wang, Z.D. Synthesis and thermomechanical research of shape memory epoxy systems. Mater. Sci. Eng. A 2011, 529, 29–34. [Google Scholar] [CrossRef]
- Liu, Y.; Han, C.; Tan, H.; Du, X. Thermal, mechanical and shape memory properties of shape memory epoxy resin. Mater. Sci. Eng. A 2010, 527, 2510–2514. [Google Scholar] [CrossRef]
- Monner, H. Smart material for active noise and vibration reduction. In Proceedings of Noise and Vibration Emerging Methods, Saint Raphael, France, 18–21 April 2005.
- Rapp, S.; Baier, H. Determination of recovery energy densities of shape memory polymers via closed-loop, force controlled recovery cycling. Smart Mater. Struct. 2010, 19, 045018:1–045018:4. [Google Scholar]
- Lakhera, N.; Yakacki, C.M.; Nguyen, T.D.; Frick, C.P. Partially constrained recovery of (meth)acrylate shape-memory polymer networks. J. Appl. Polym. Sci. 2012, 126, 72–82. [Google Scholar] [CrossRef]
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Basit, A.; L'Hostis, G.; Pac, M.J.; Durand, B. Thermally Activated Composite with Two-Way and Multi-Shape Memory Effects. Materials 2013, 6, 4031-4045. https://doi.org/10.3390/ma6094031
Basit A, L'Hostis G, Pac MJ, Durand B. Thermally Activated Composite with Two-Way and Multi-Shape Memory Effects. Materials. 2013; 6(9):4031-4045. https://doi.org/10.3390/ma6094031
Chicago/Turabian StyleBasit, Abdul, Gildas L'Hostis, Marie José Pac, and Bernard Durand. 2013. "Thermally Activated Composite with Two-Way and Multi-Shape Memory Effects" Materials 6, no. 9: 4031-4045. https://doi.org/10.3390/ma6094031