
Efficiency Enhancement of a Low-Voltage Automotive Vacuum Cleaner Using a Switched Reluctance Motor

Abstract
:1. Introduction
2. SRM Design for Low-Voltage Automotive Vacuum Cleaner
2.1. Design Requirements
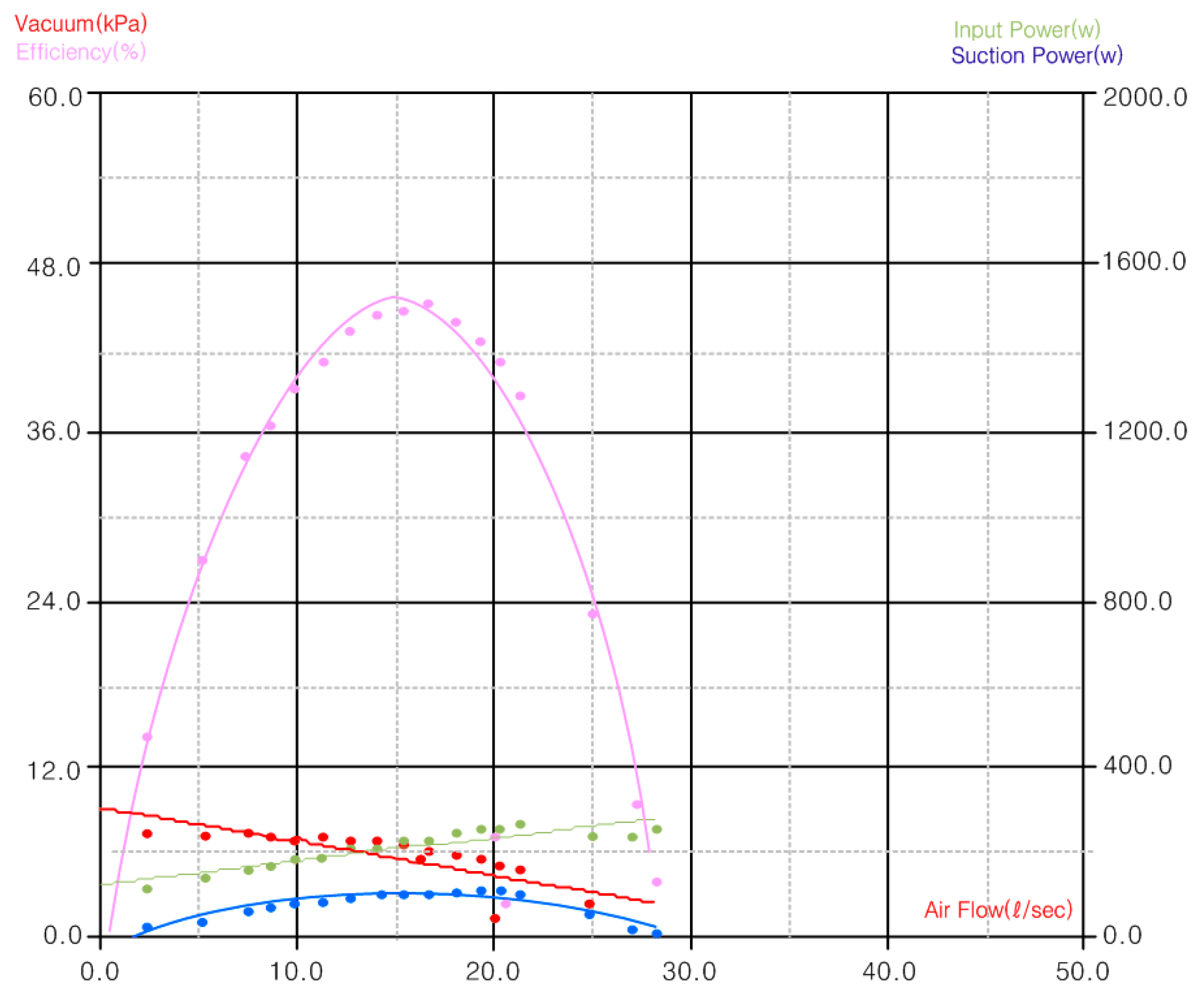
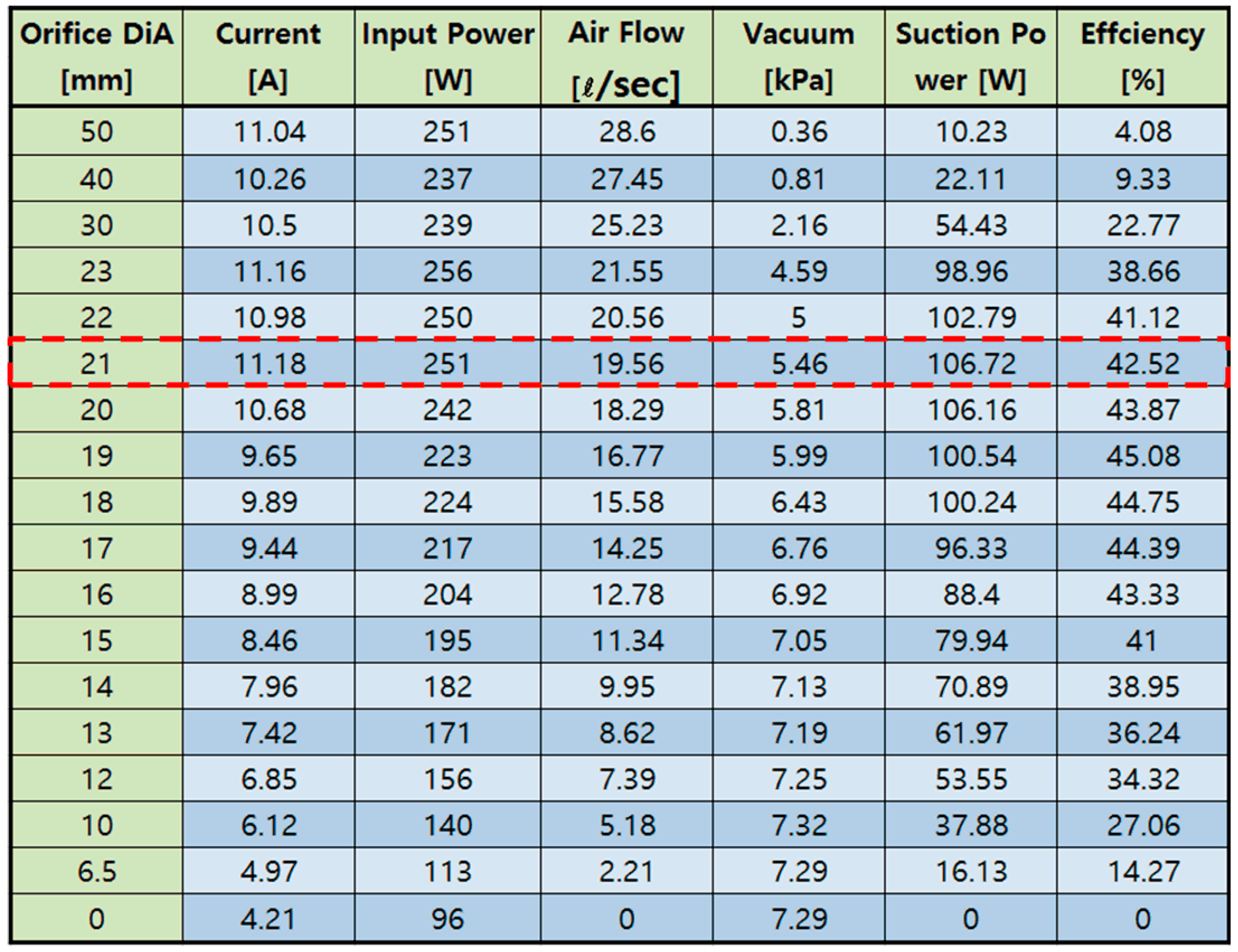
2.2. Analysis of Characteristics
3. SRM Design
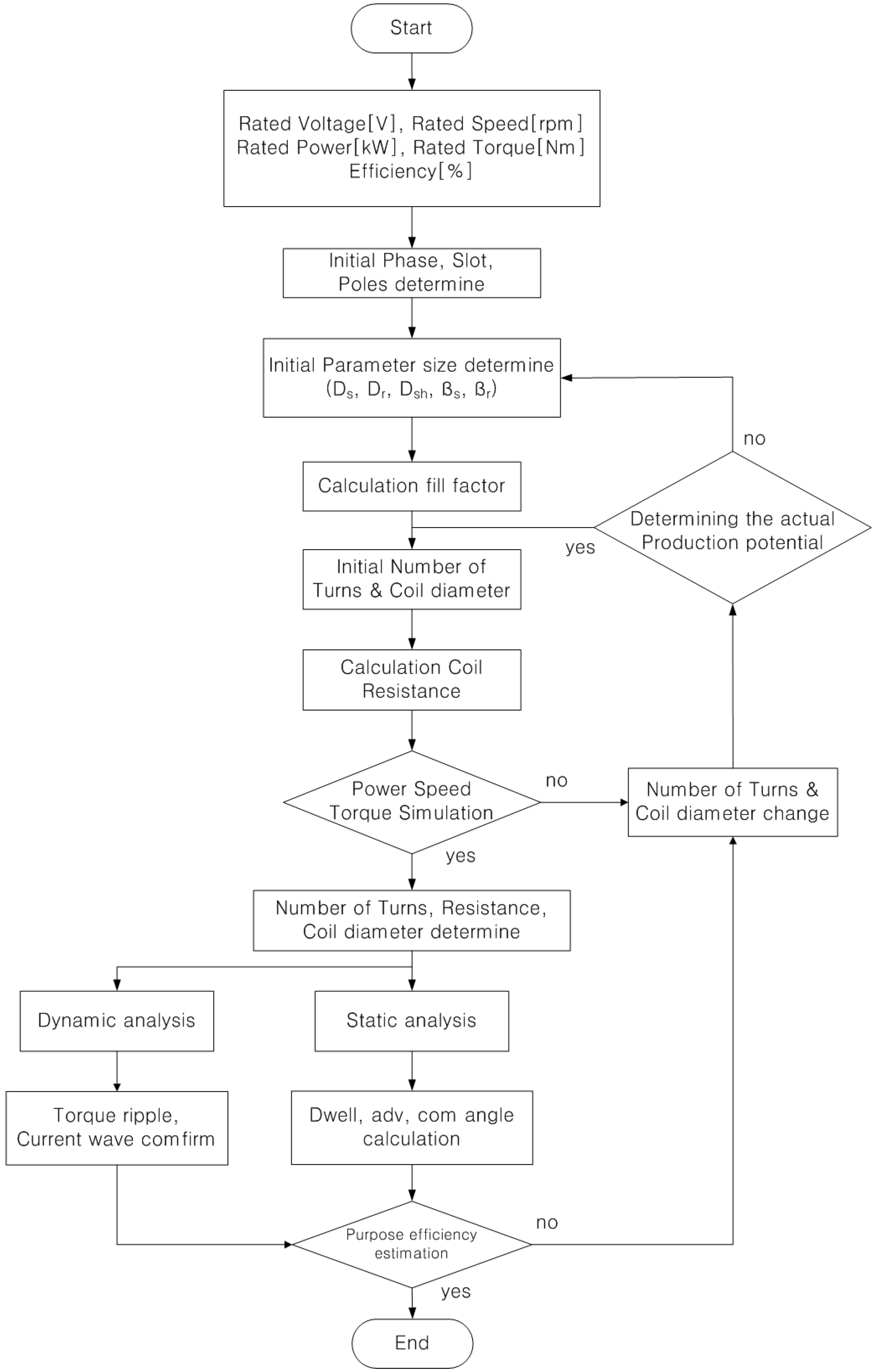
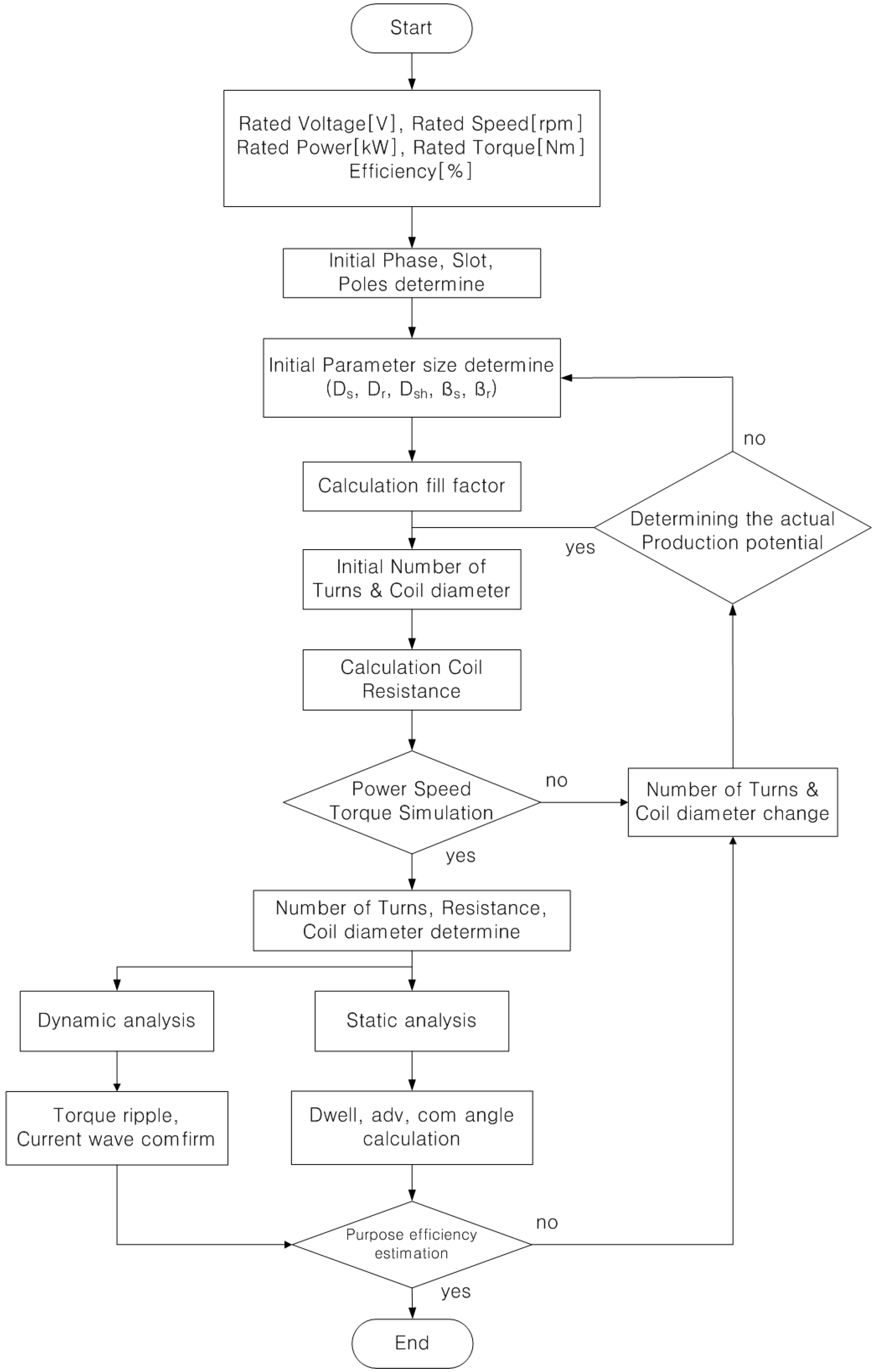
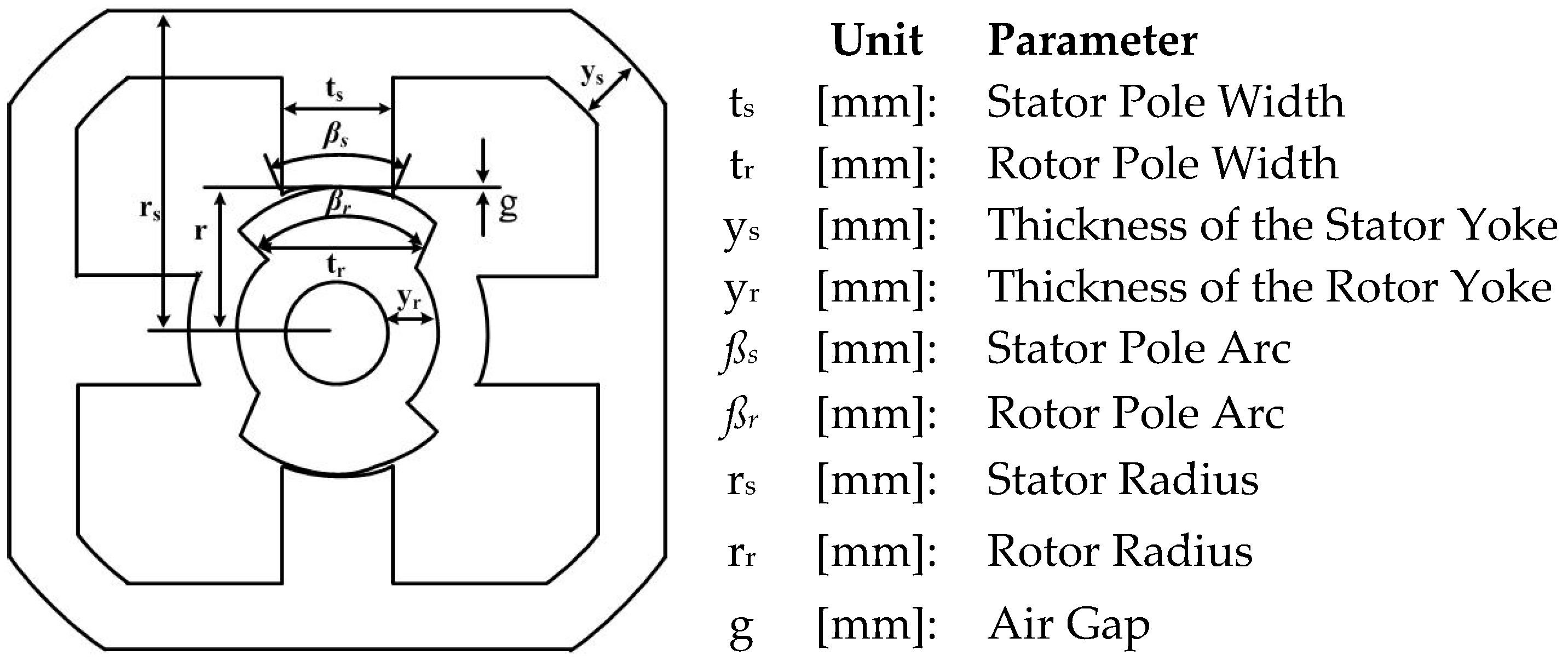
3.1. Basic Design of SRM
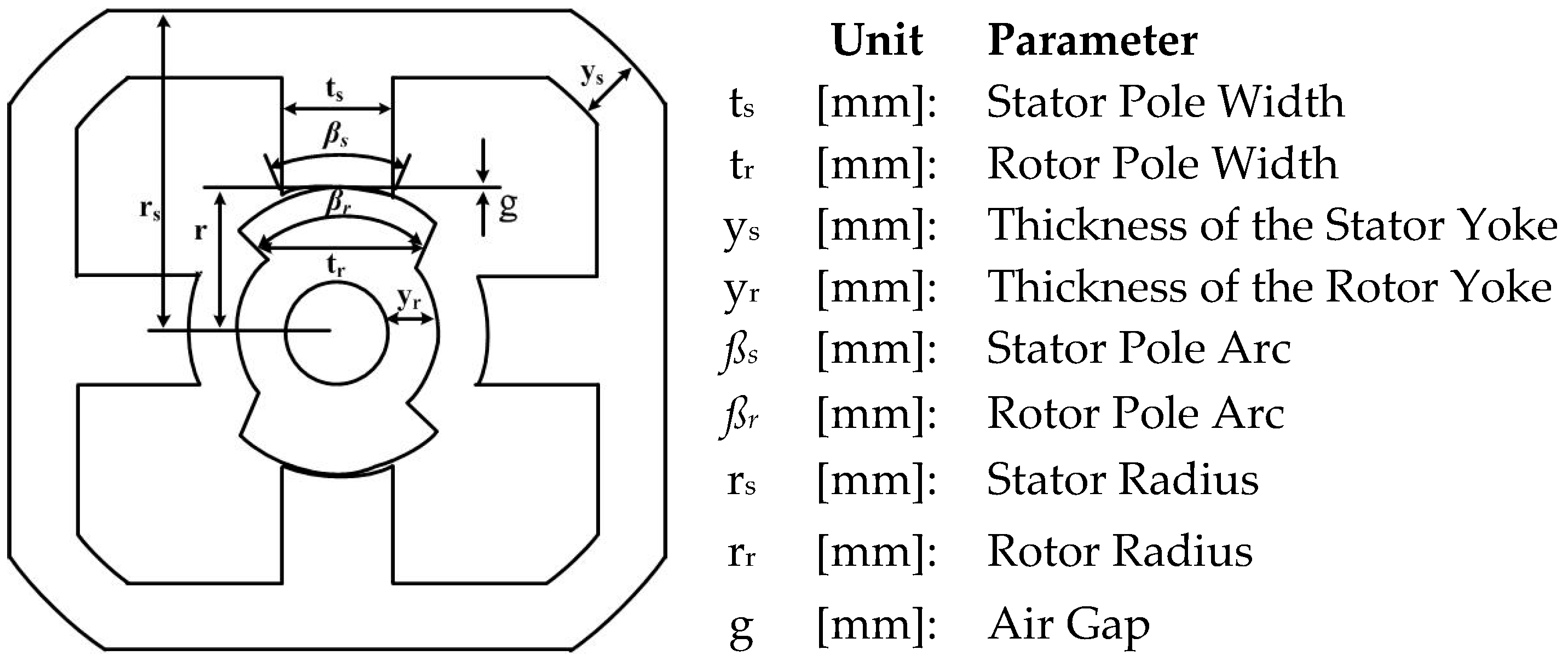
3.1.1. Stator and Rotor Yoke and Pole Width
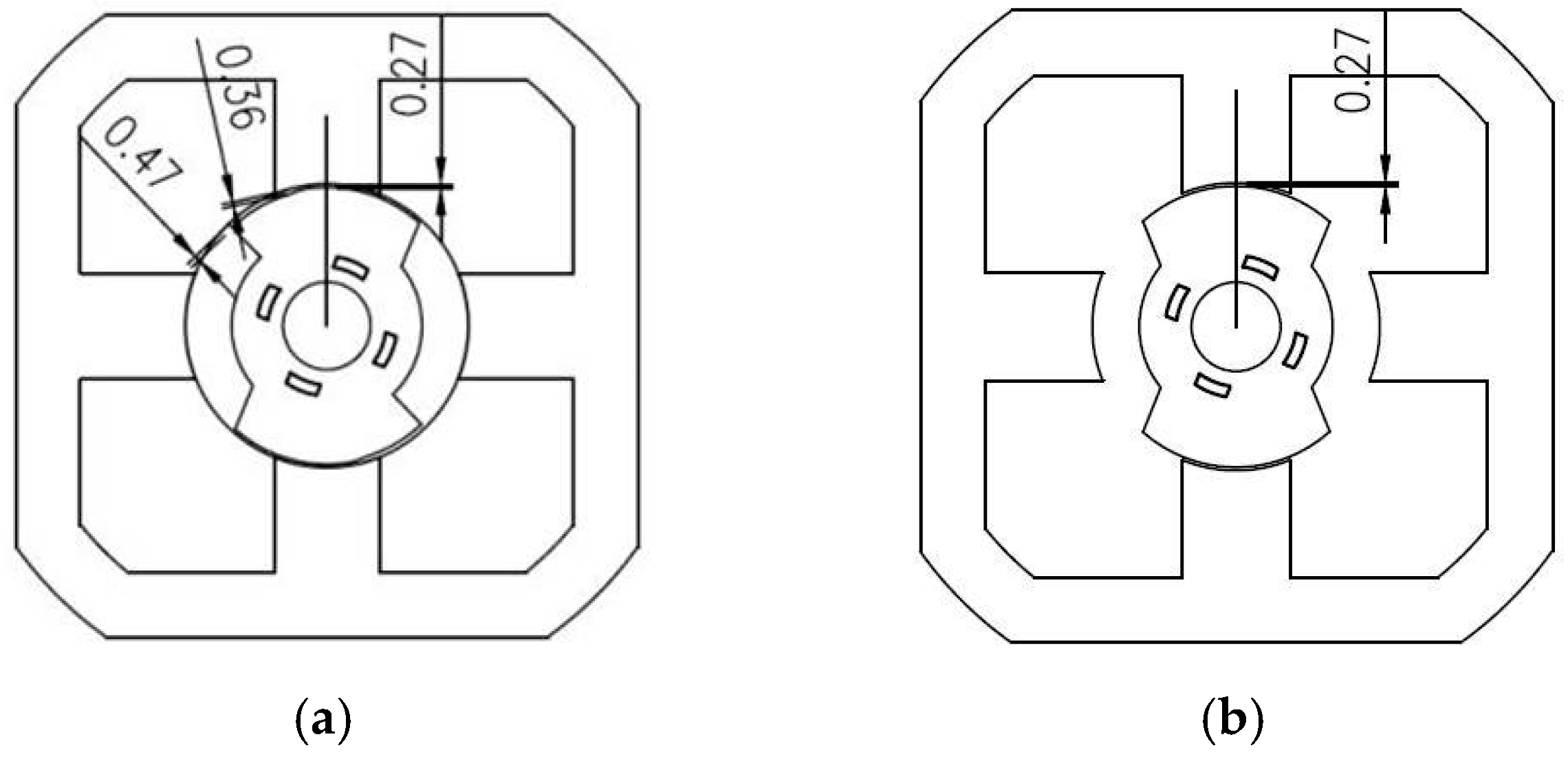
3.1.2. Stator Rotor Pole Arc
3.1.3. Air Gap
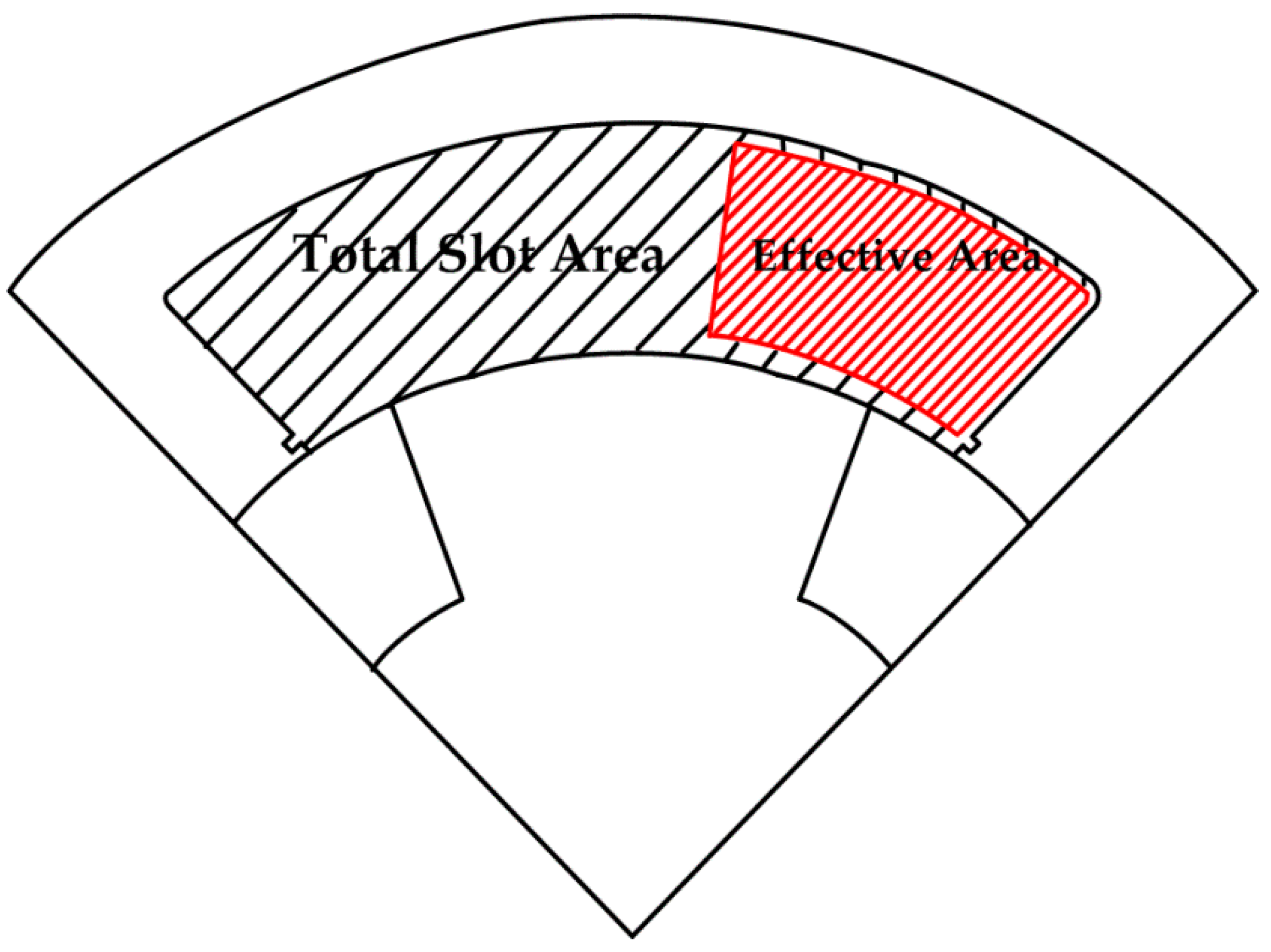
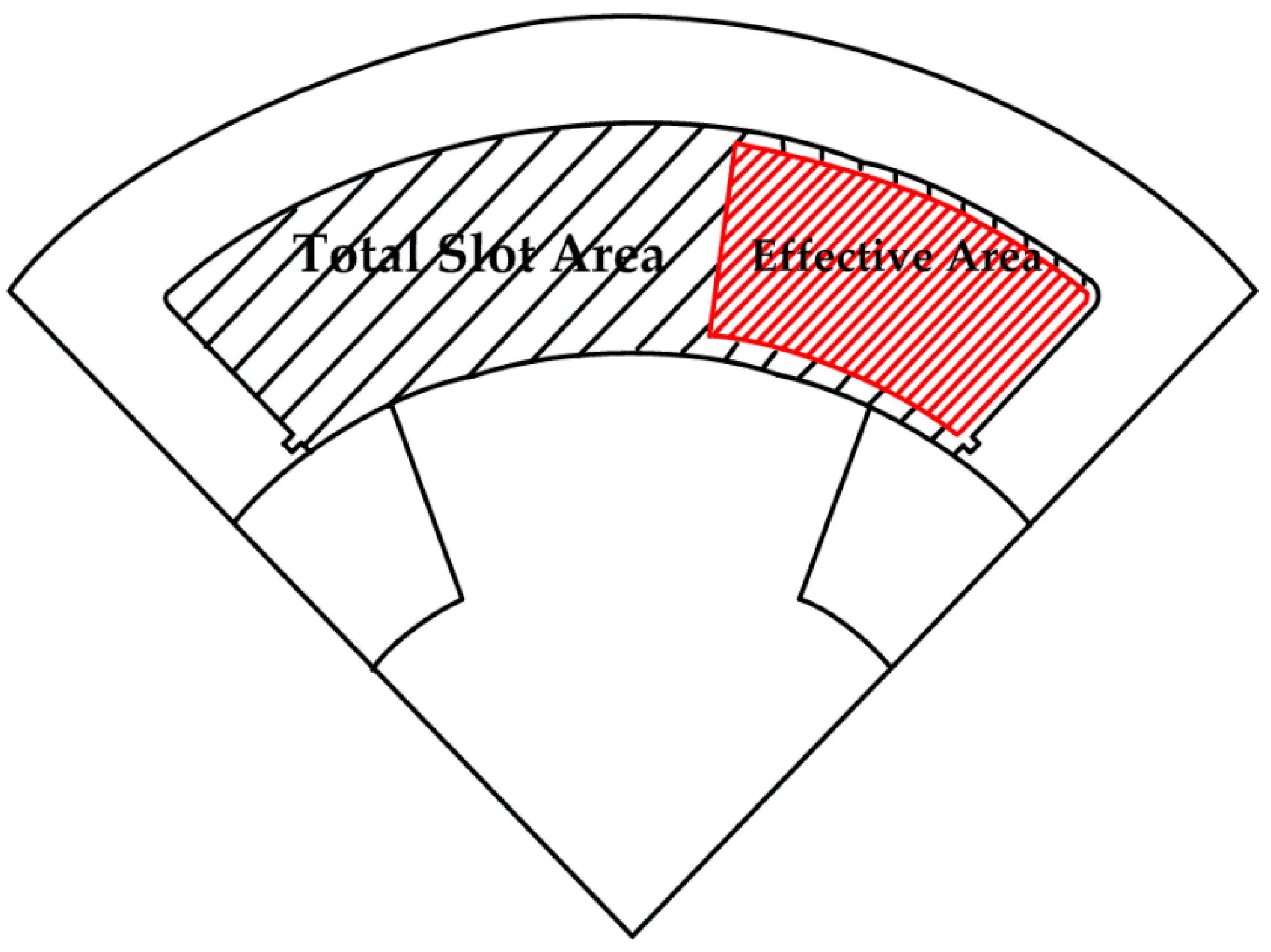
3.1.4. Slot Fill Factor
3.2. Optimum SRM Design
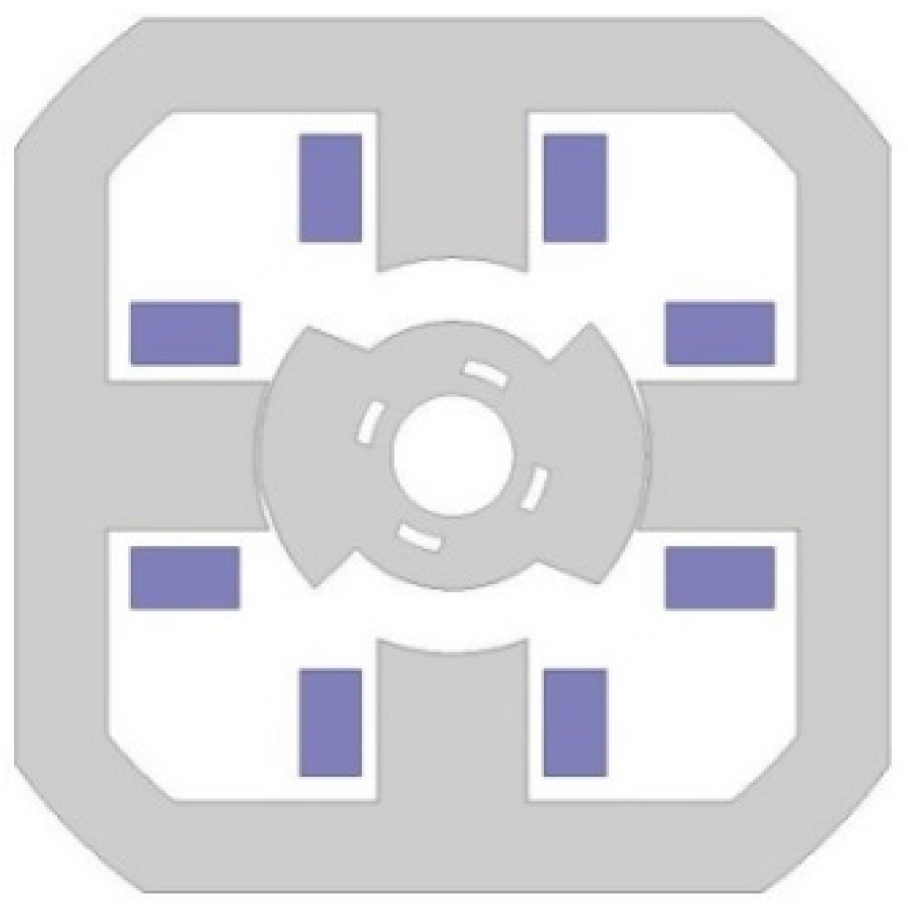
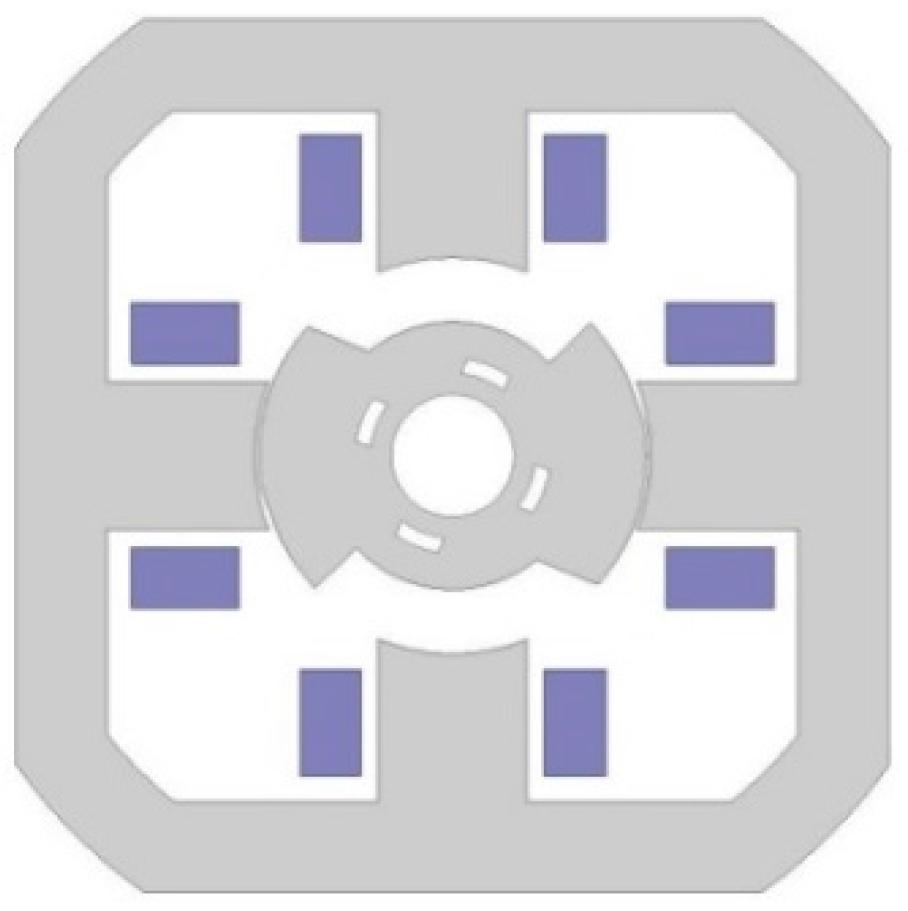
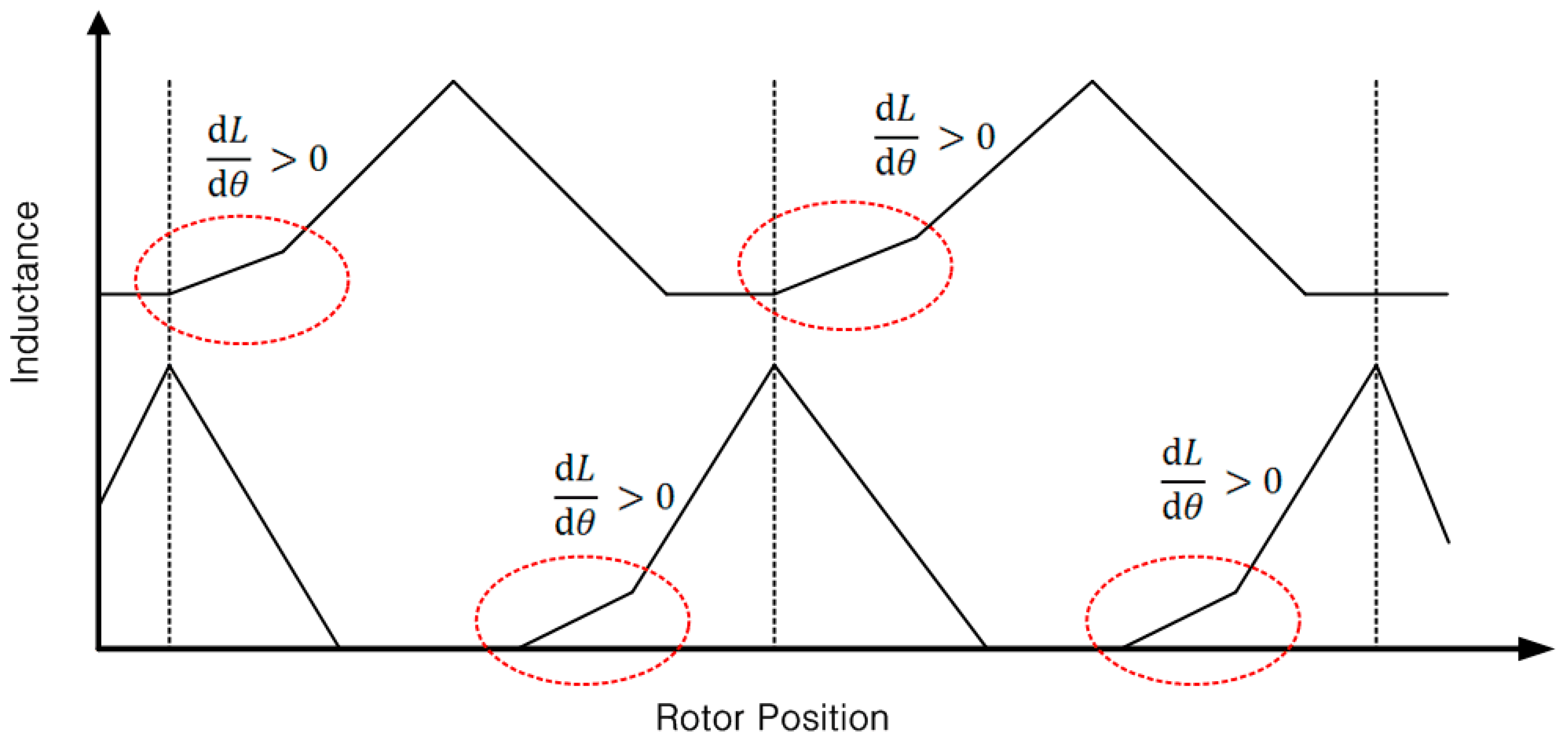
3.2.1. Structural Characteristics of Two-Phase SRM
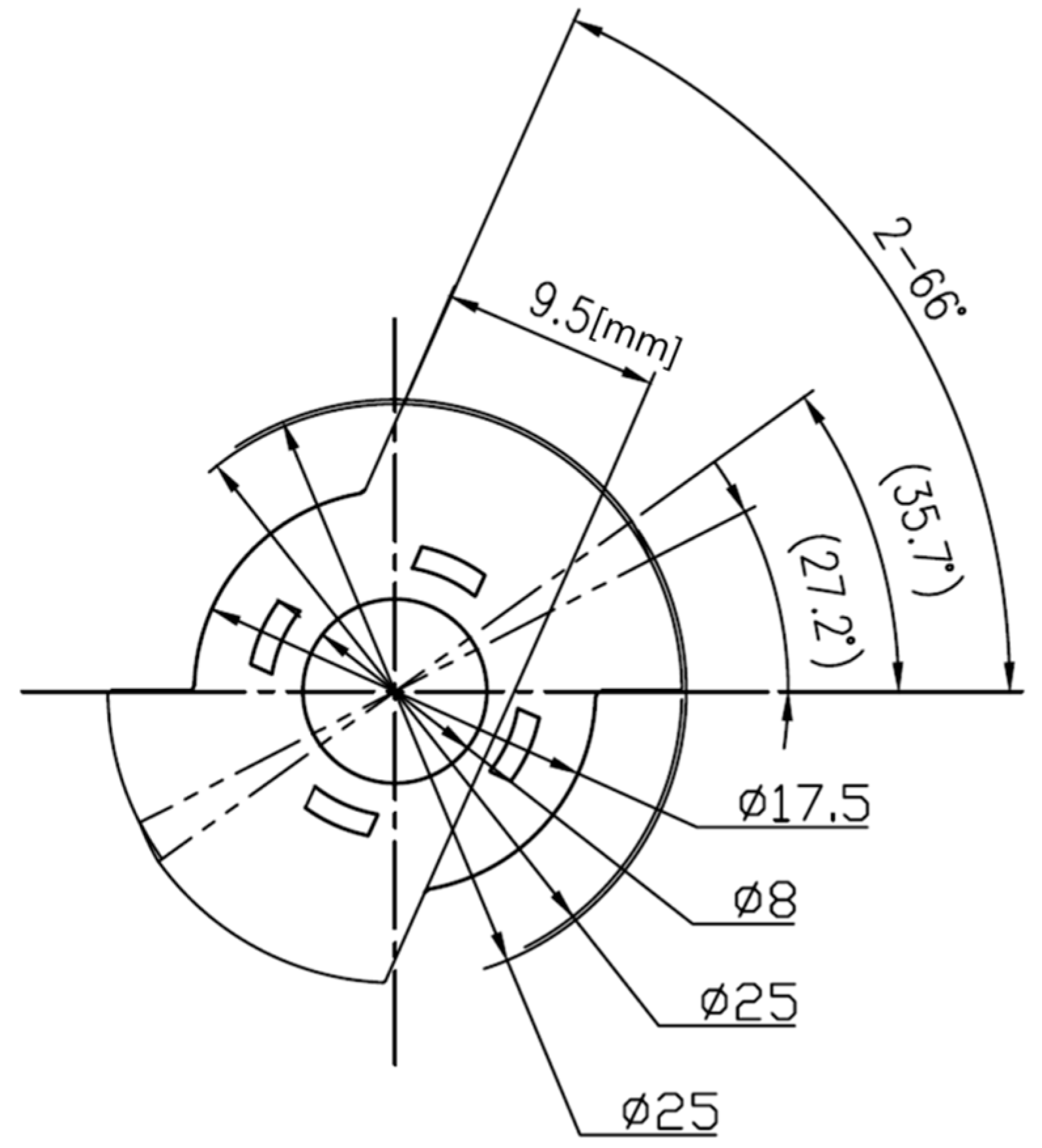
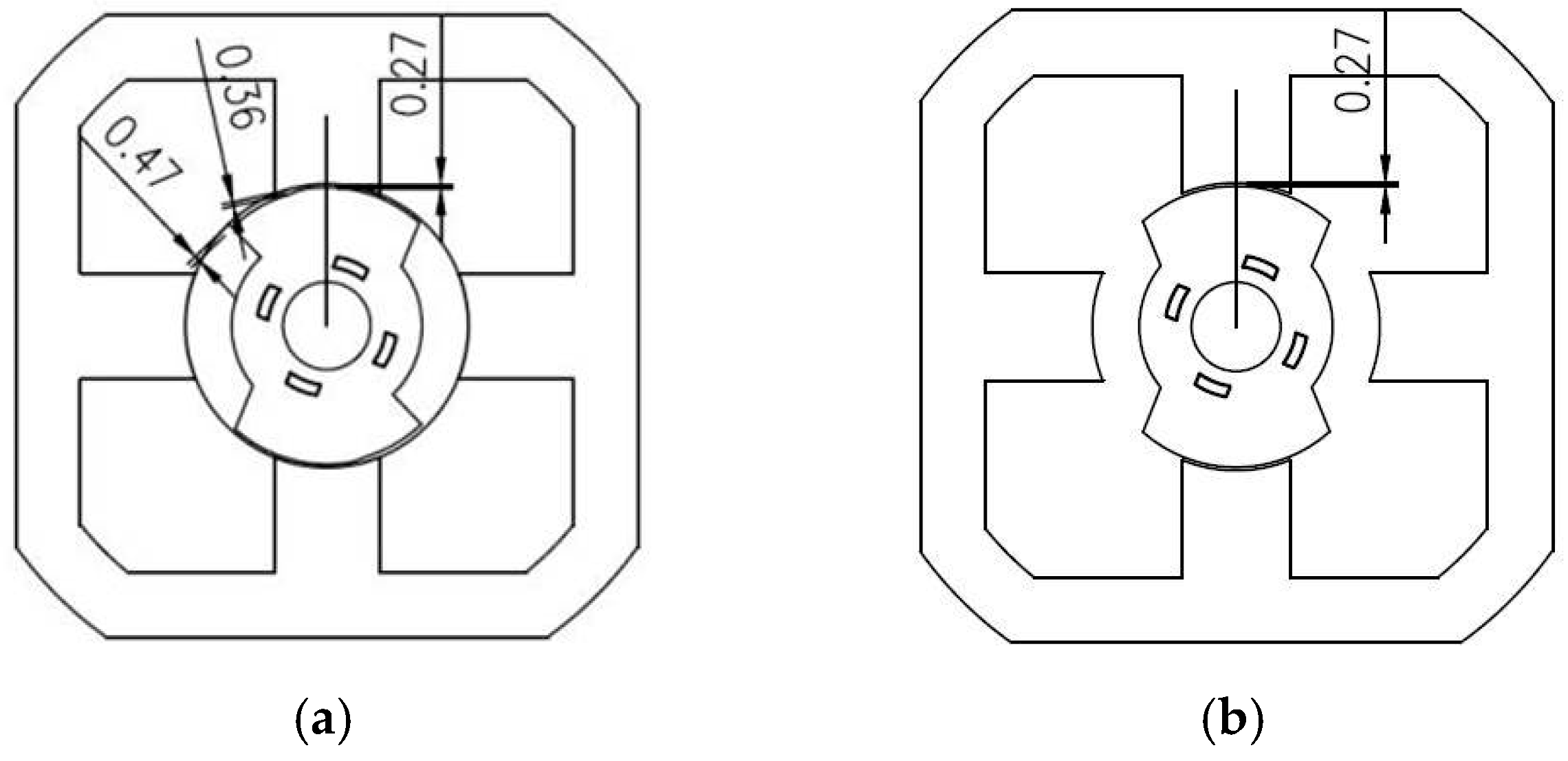
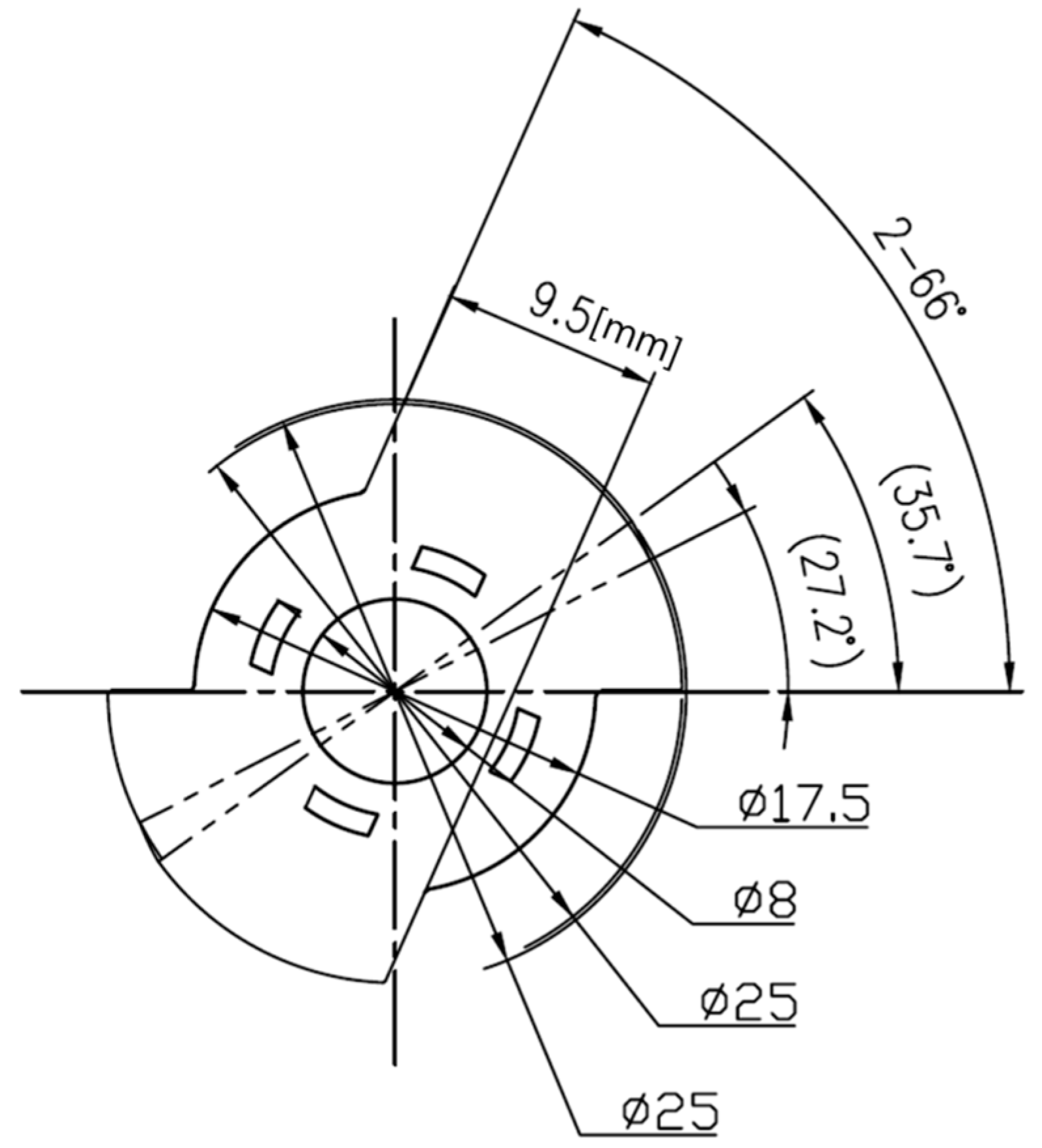
3.2.2. Design Details
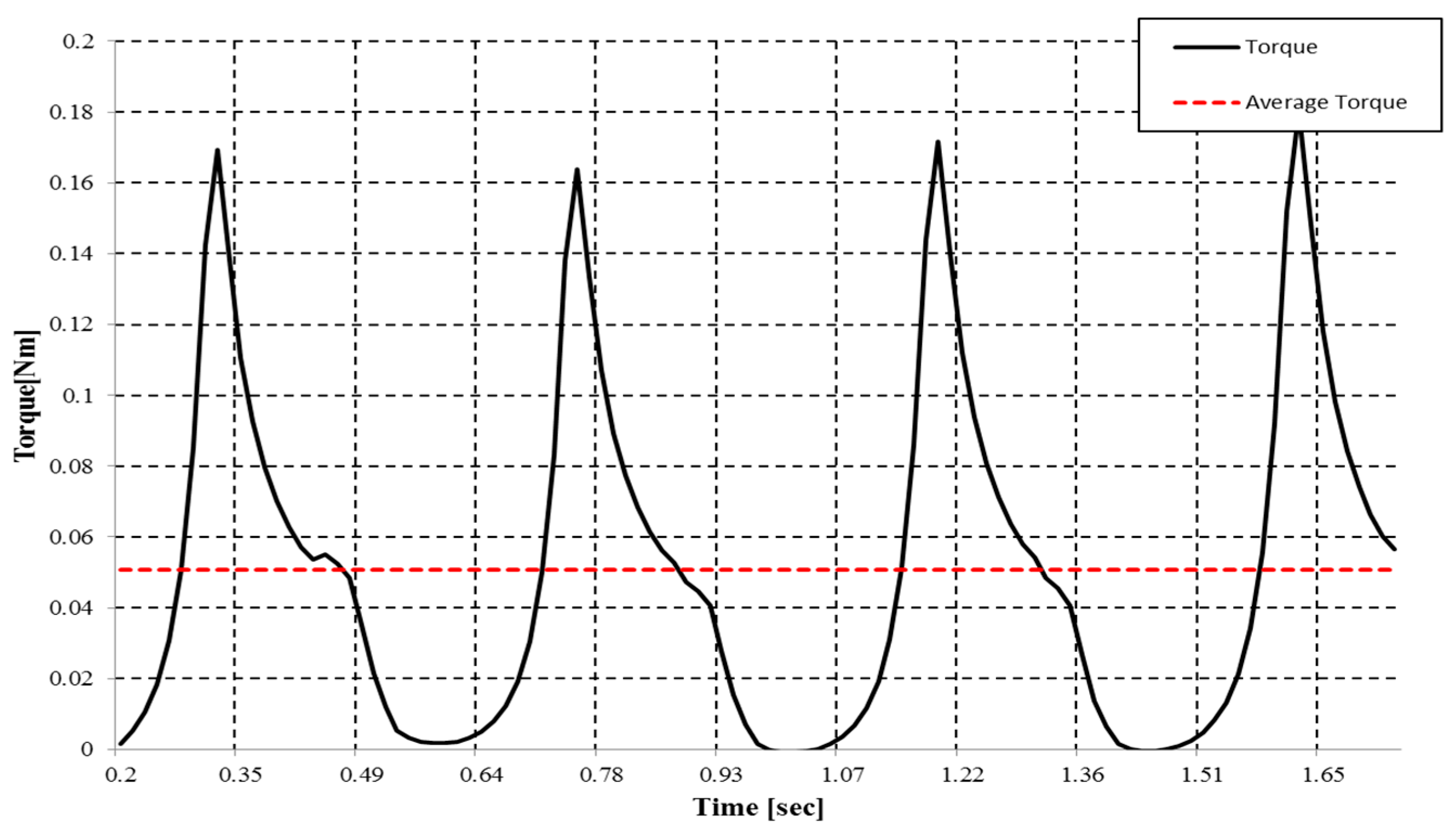
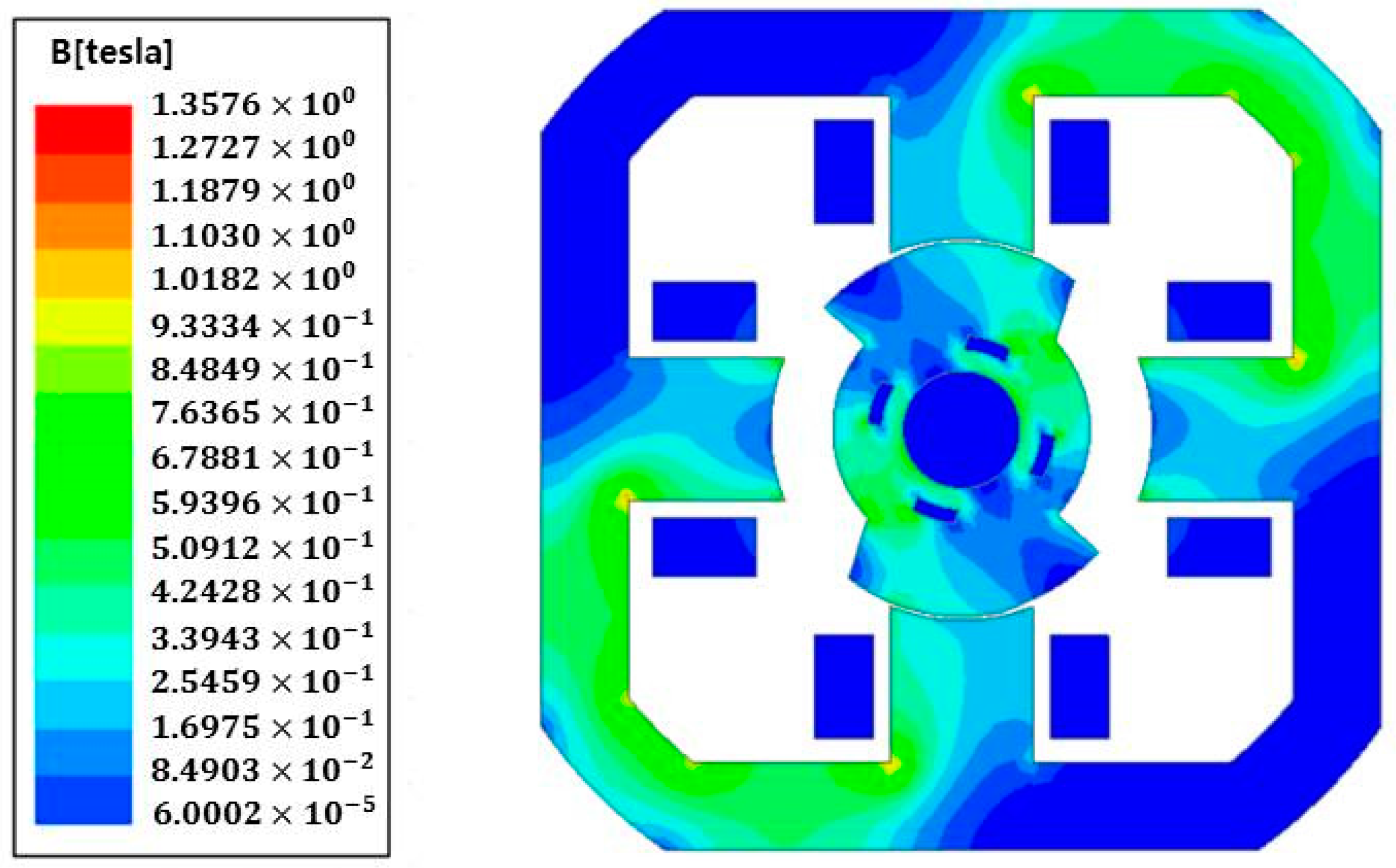
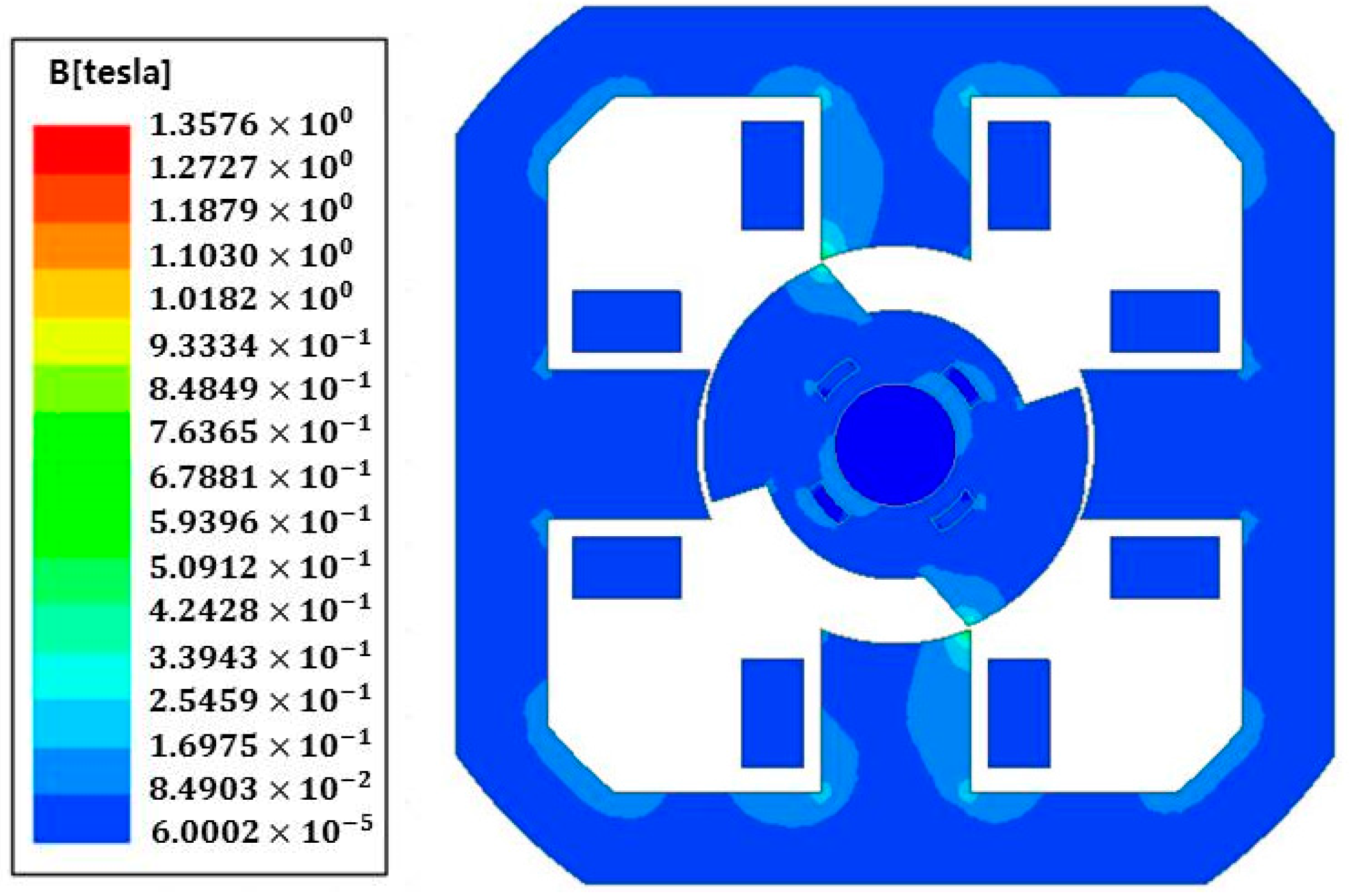
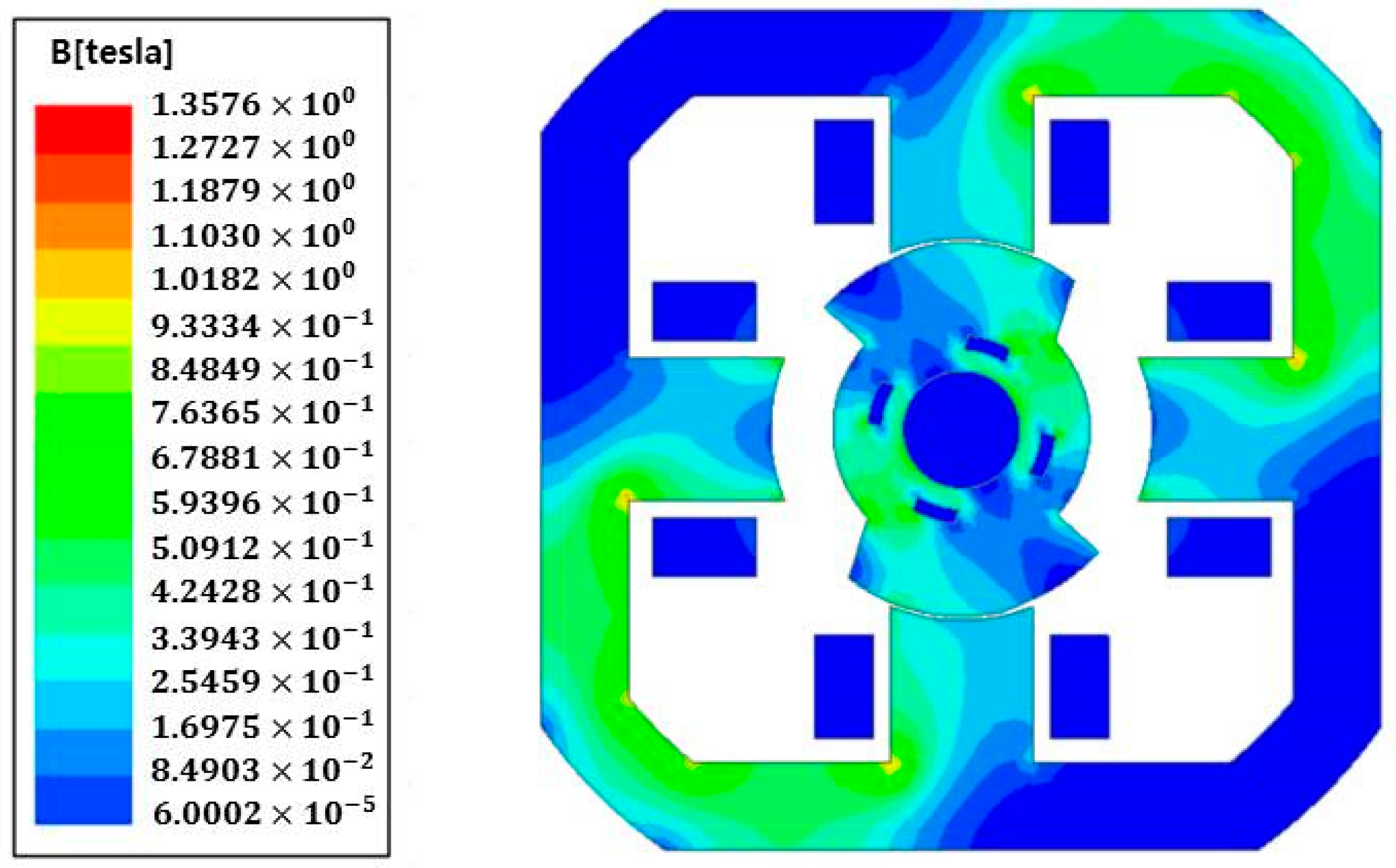
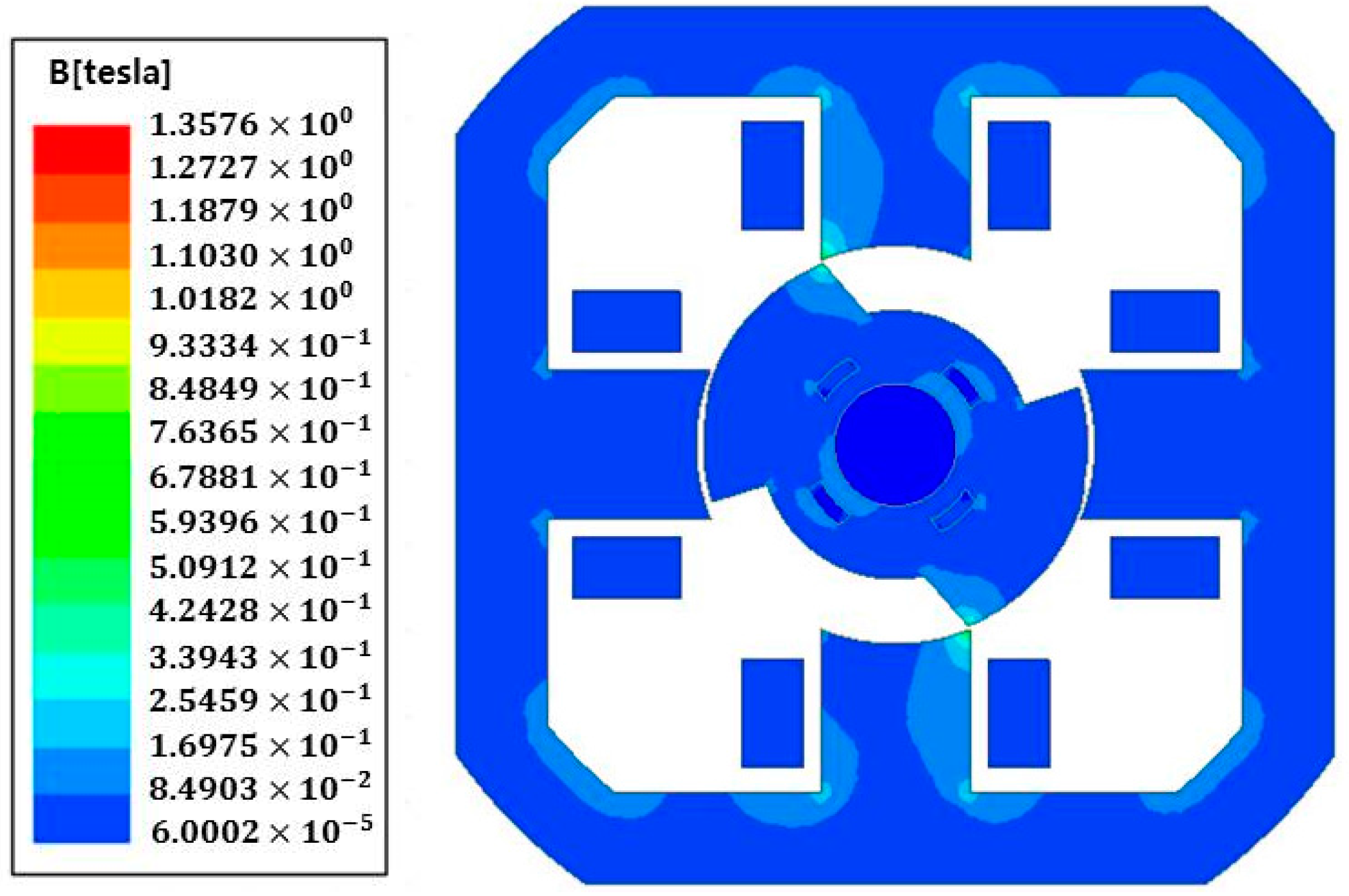
3.3. Finite Element Method of the Designed SRM
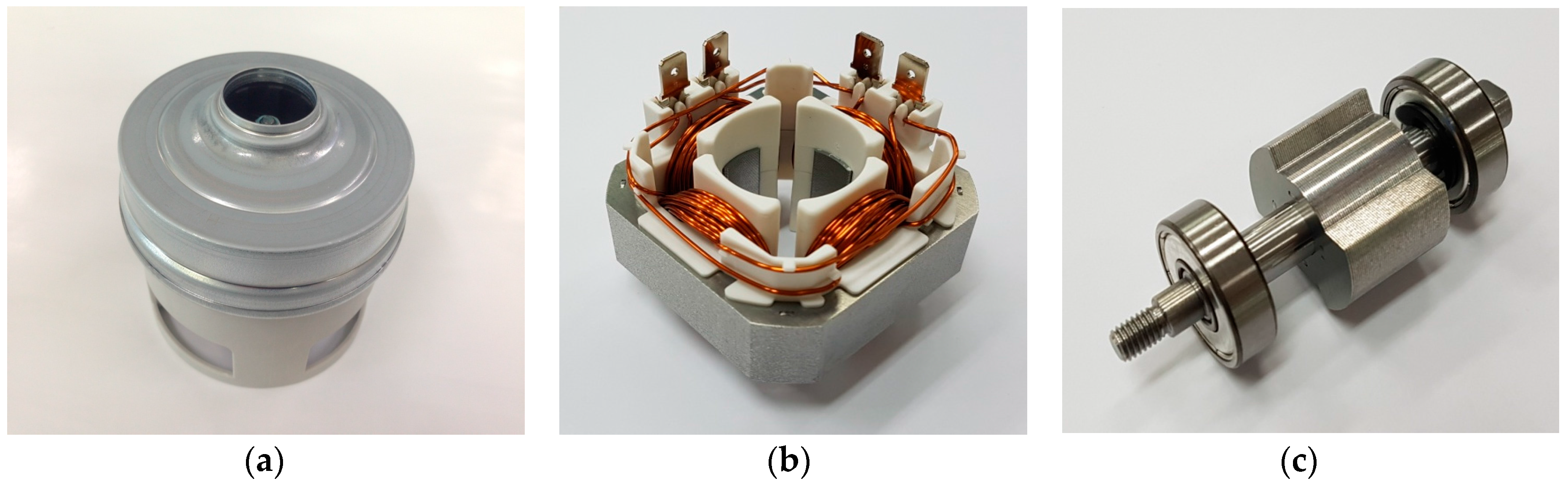
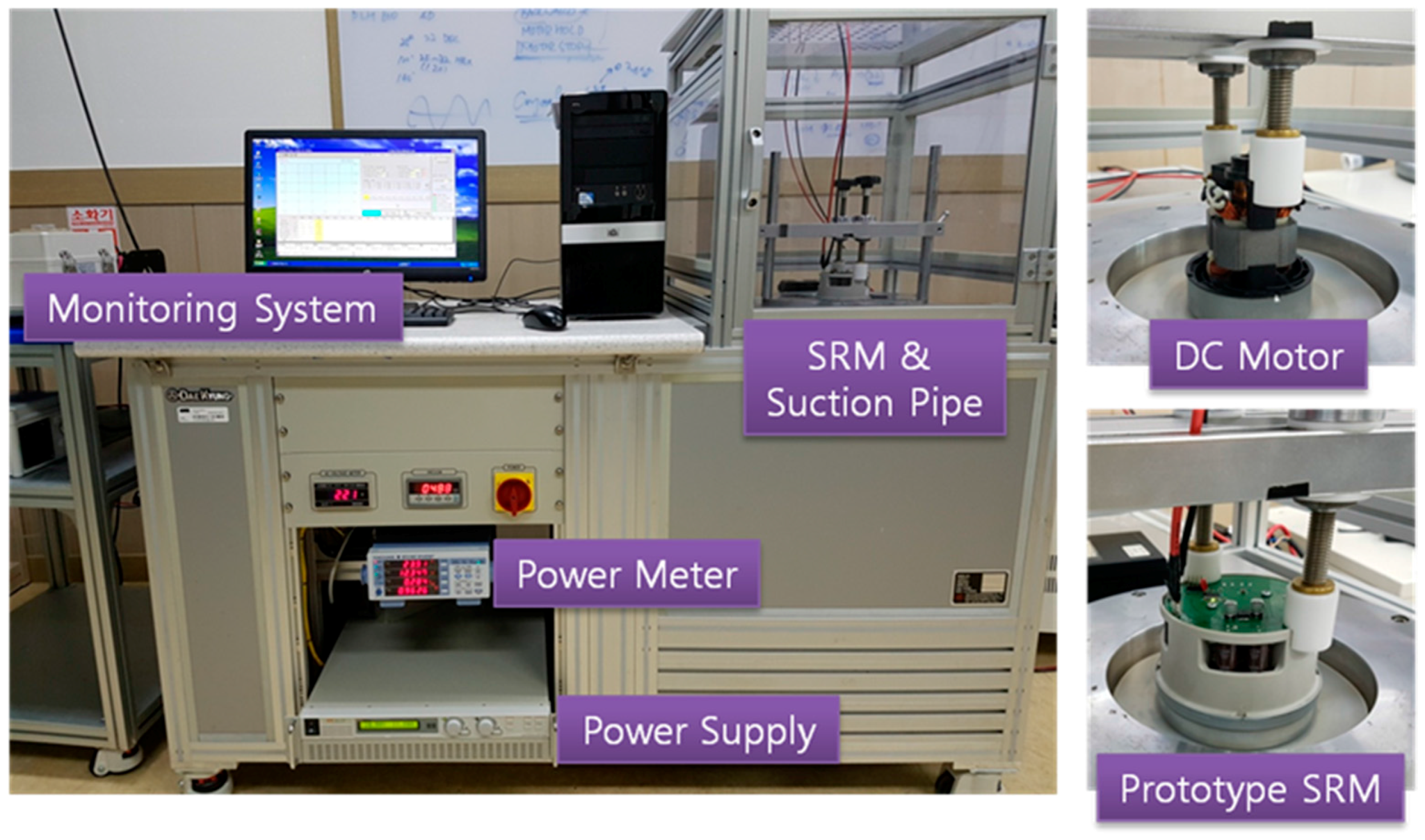
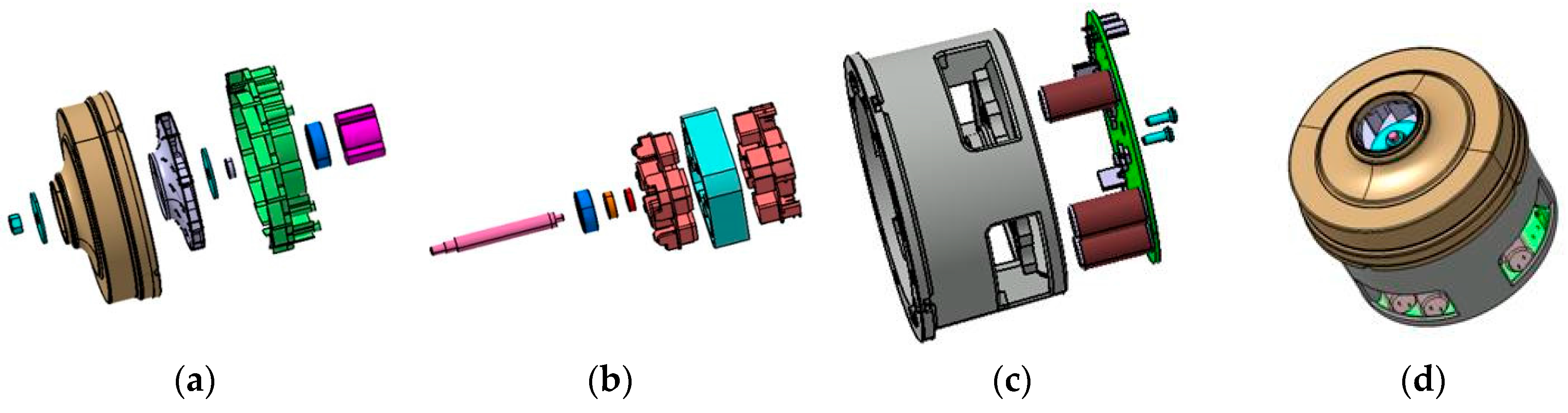
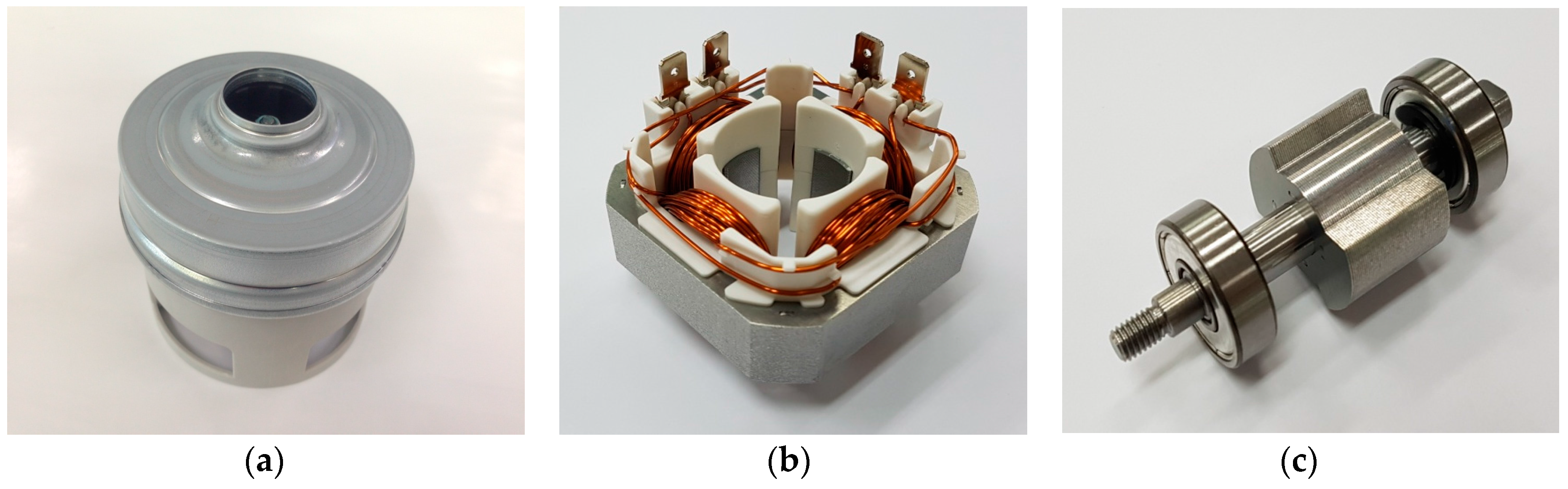
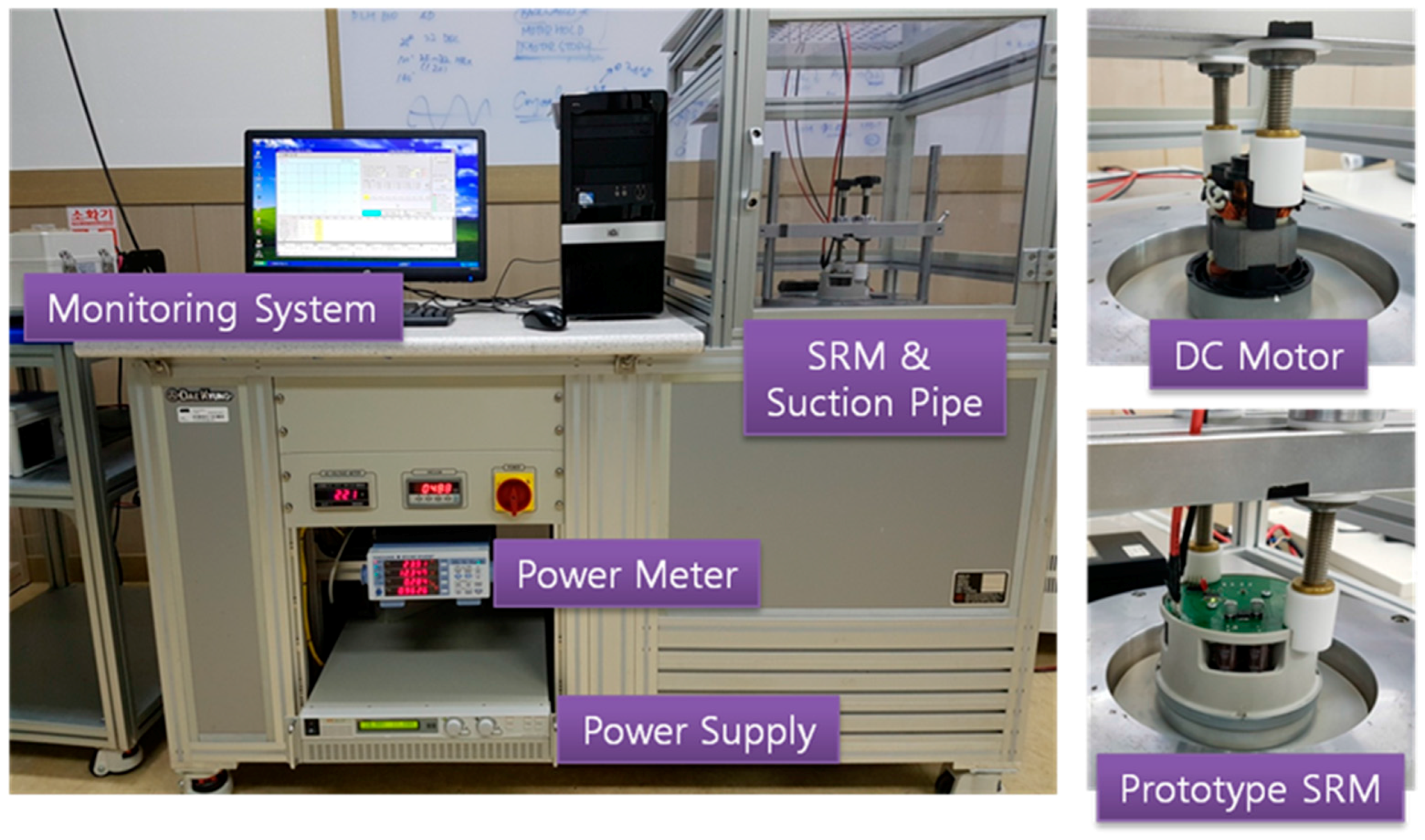
4. Prototype Production
5. Analysis of Prototype Motor Characteristics
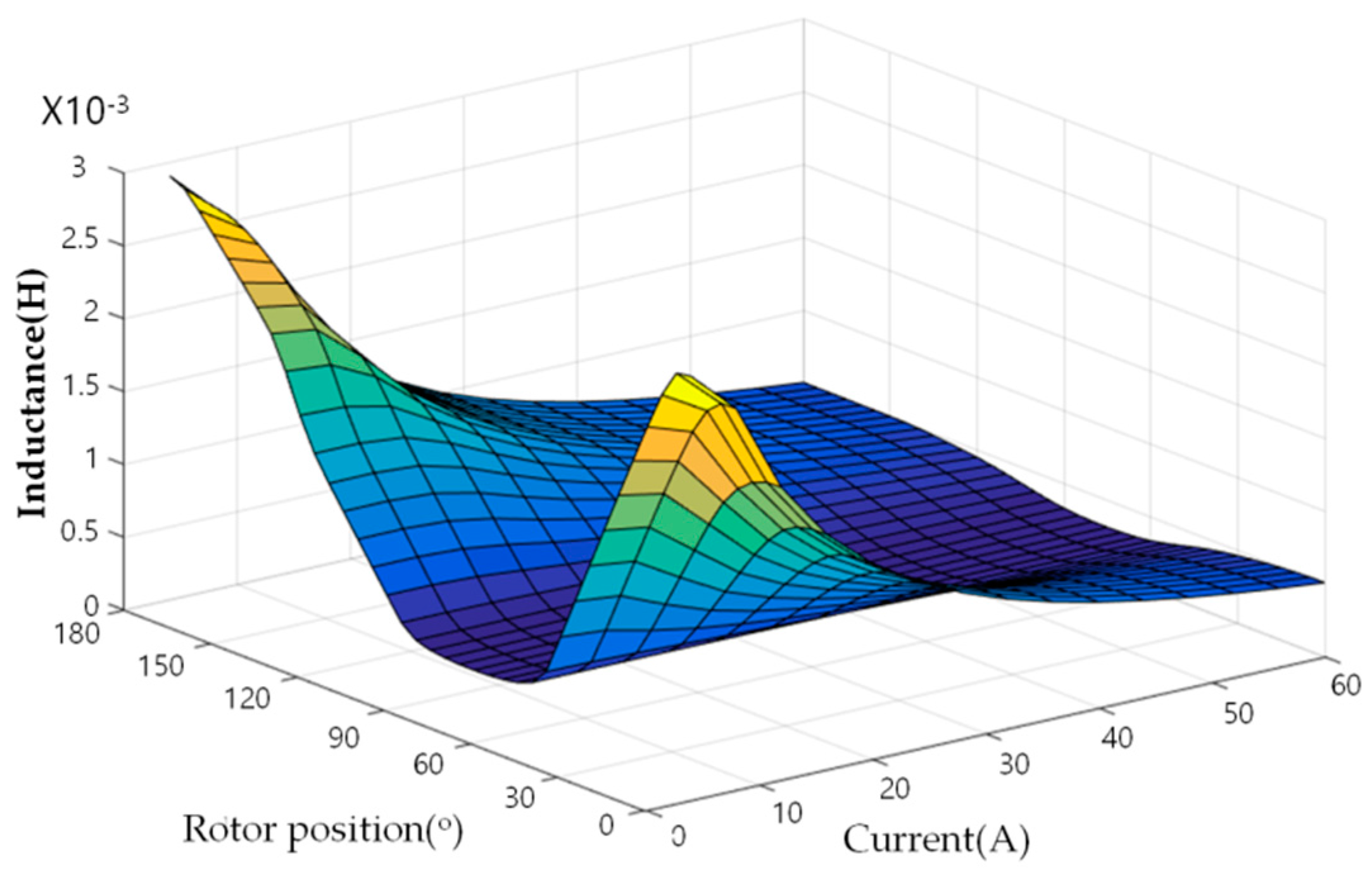
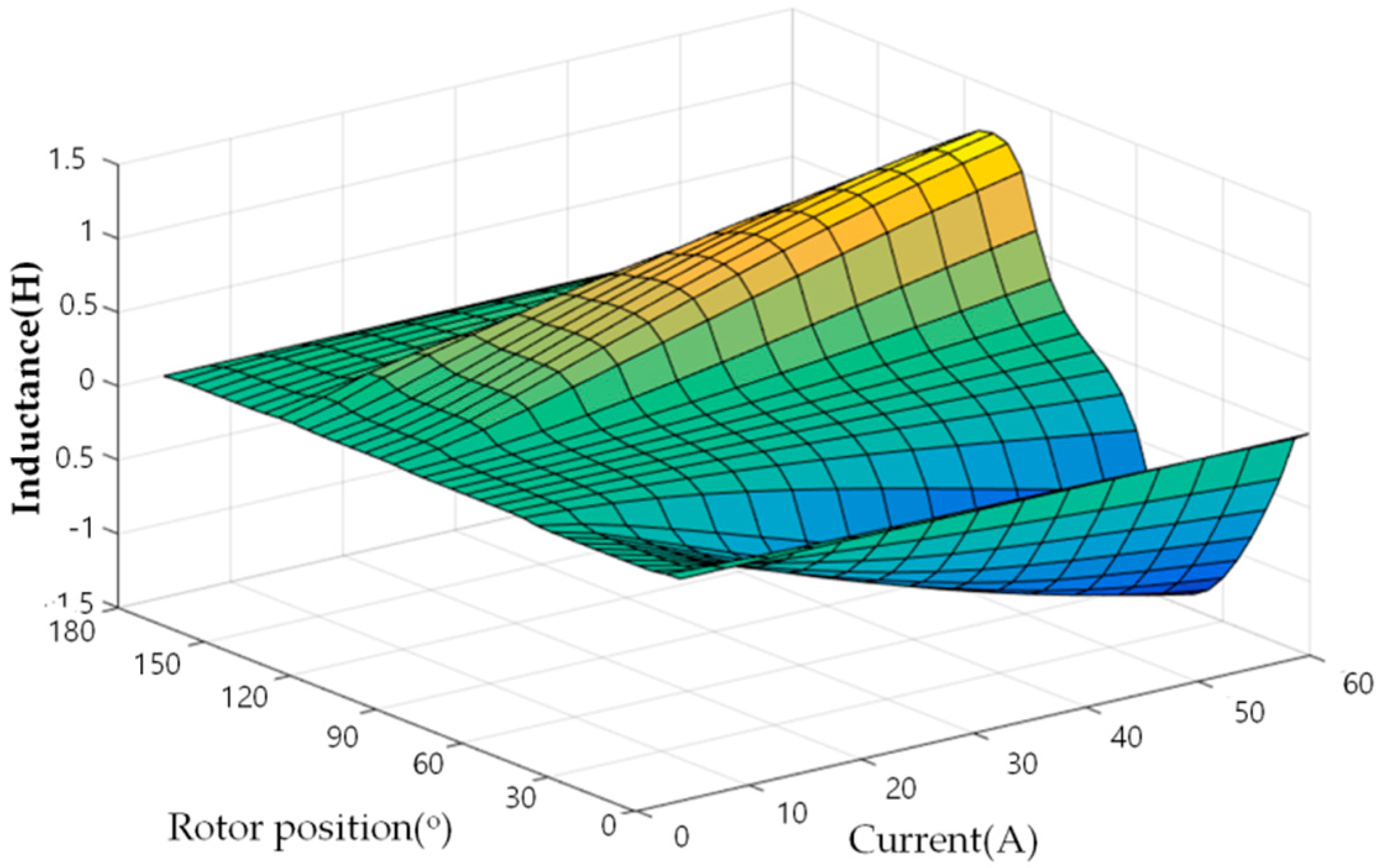
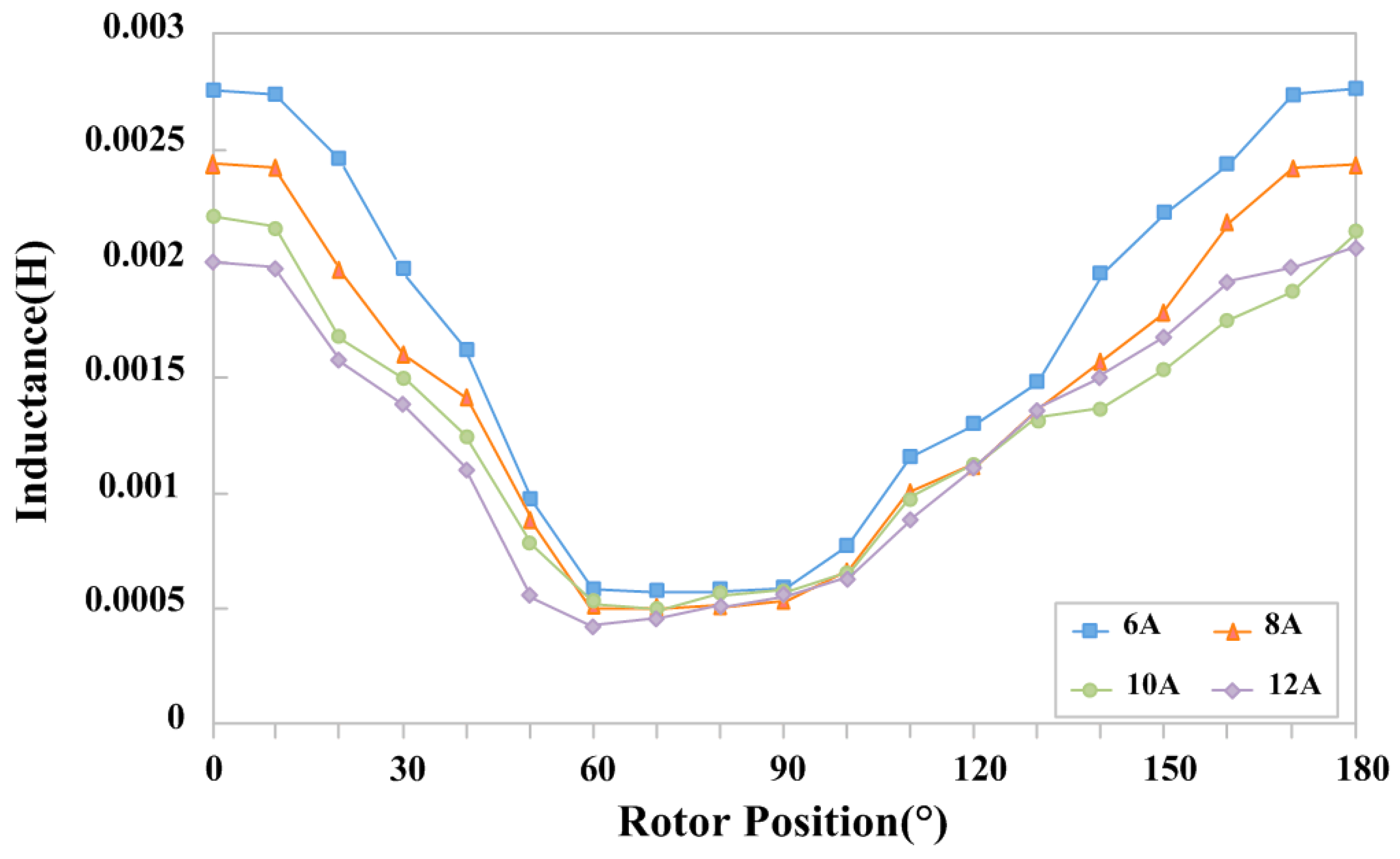
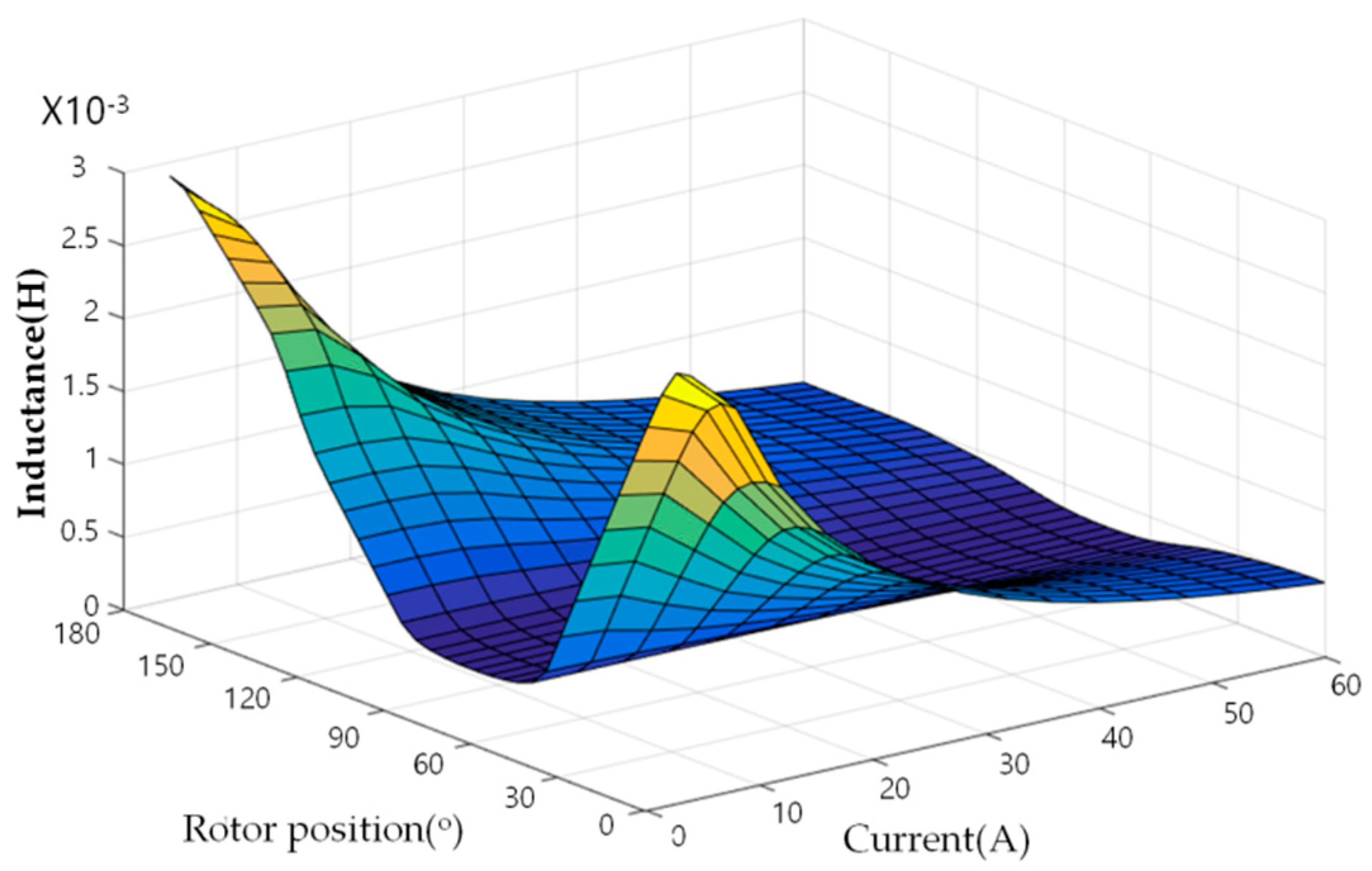
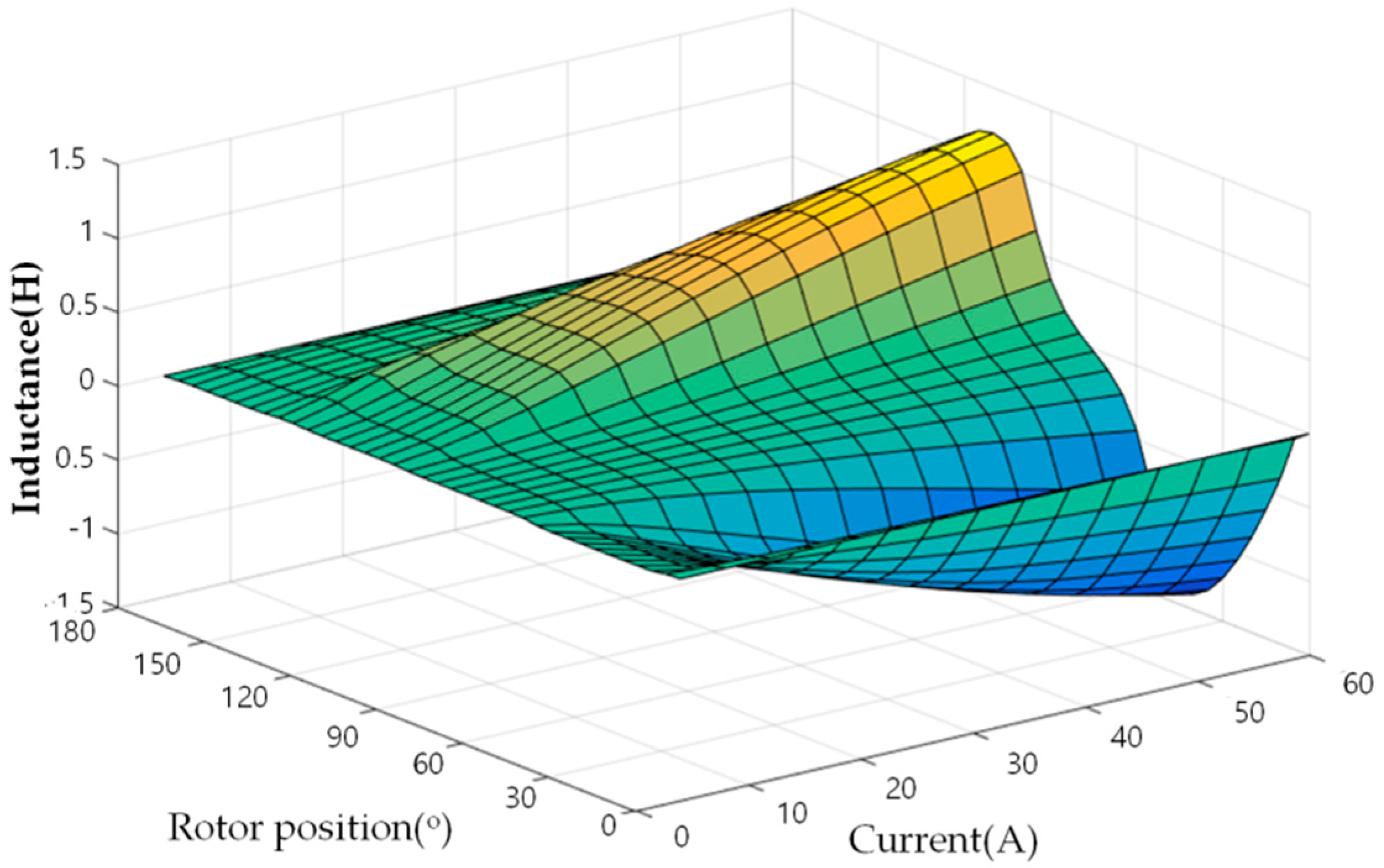
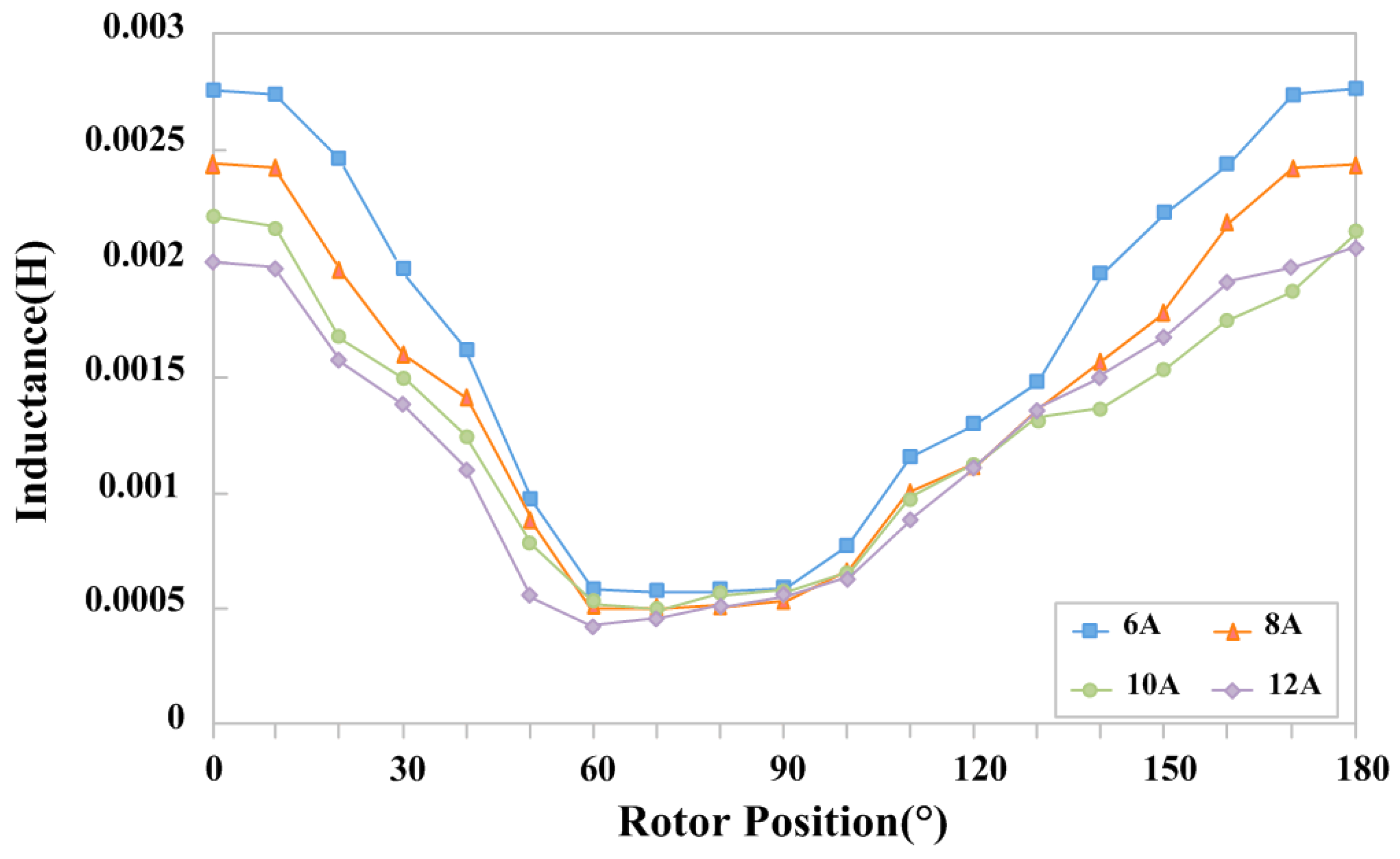
5.1. Measurement of the Prototype Motor Inductance
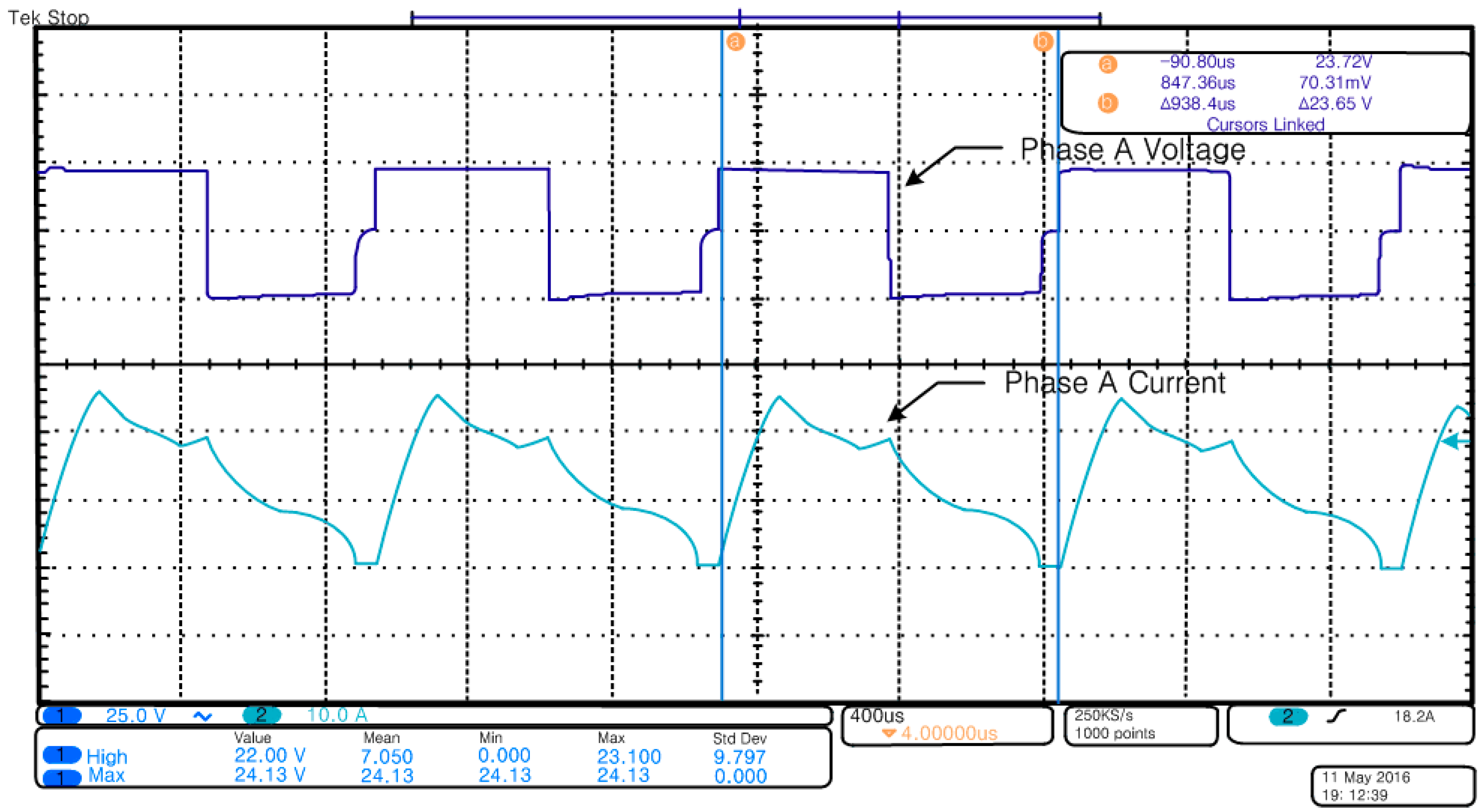
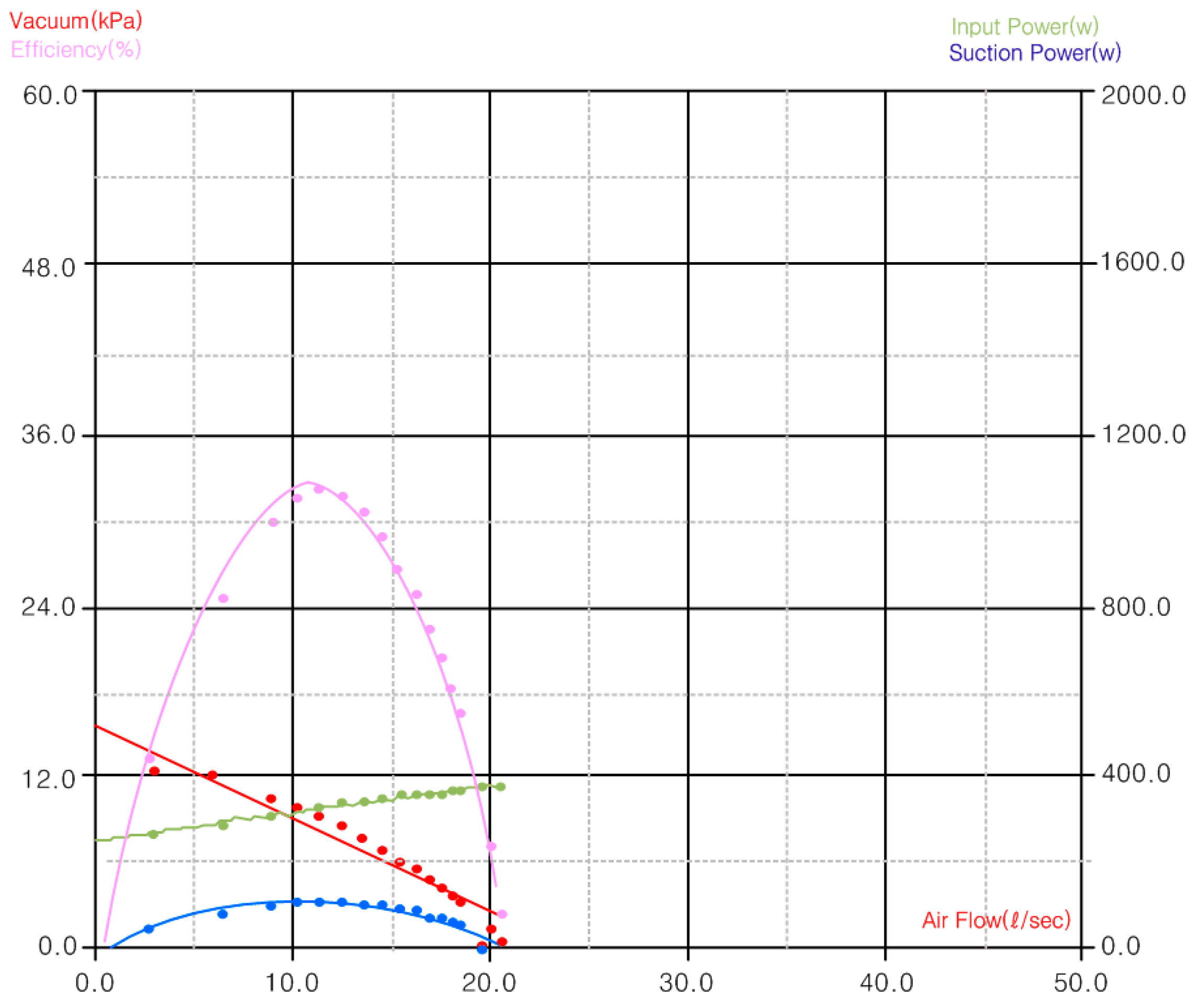
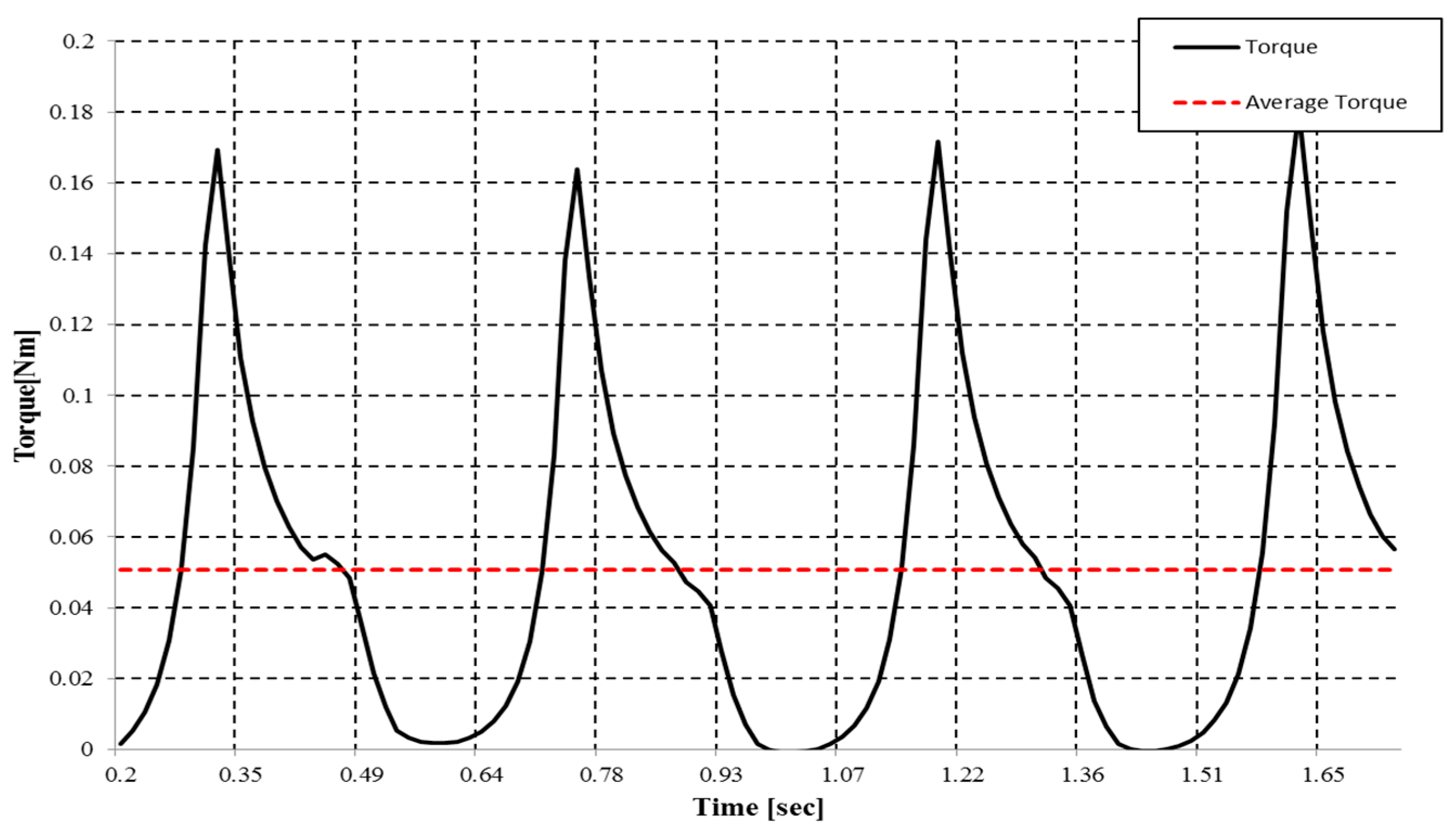
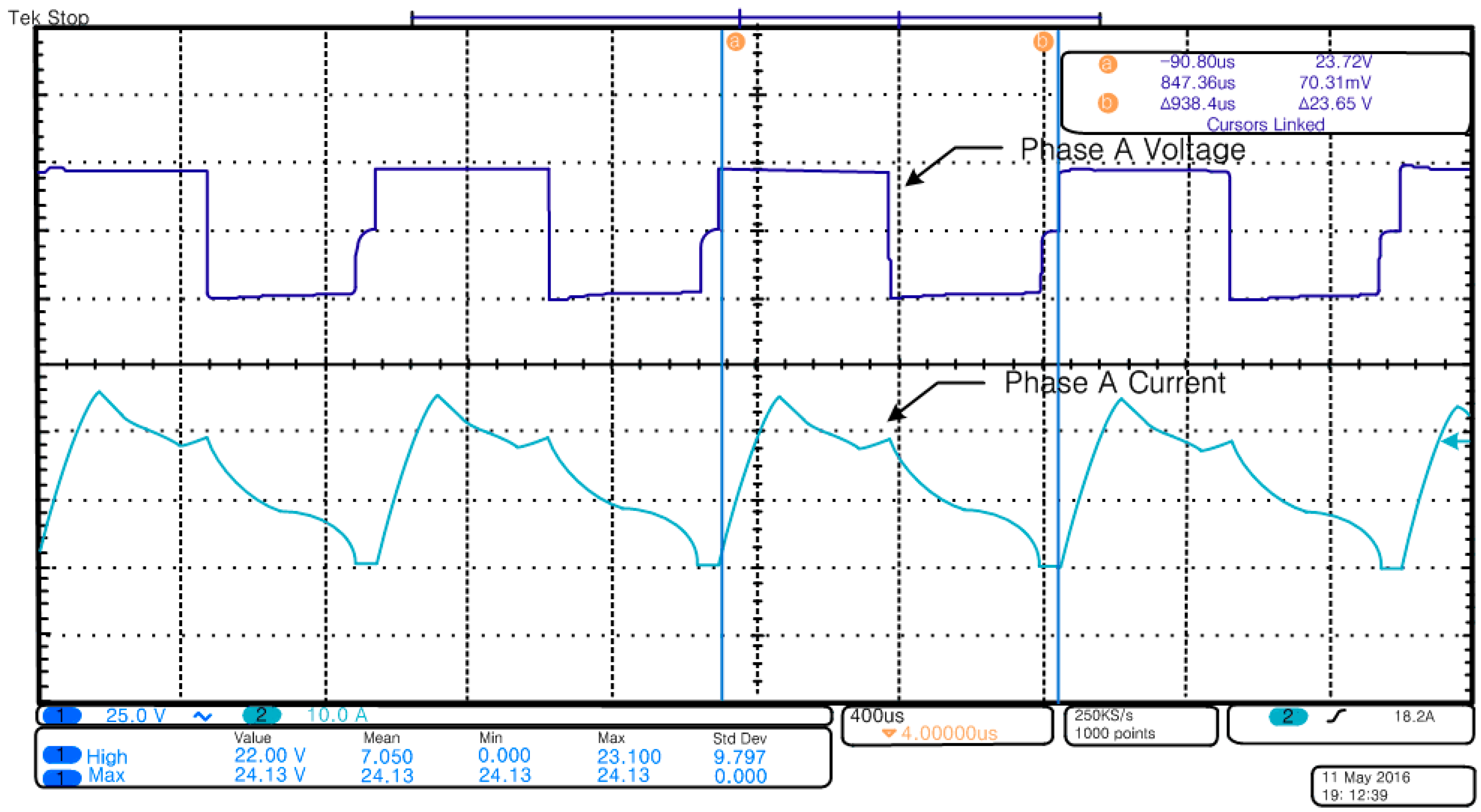
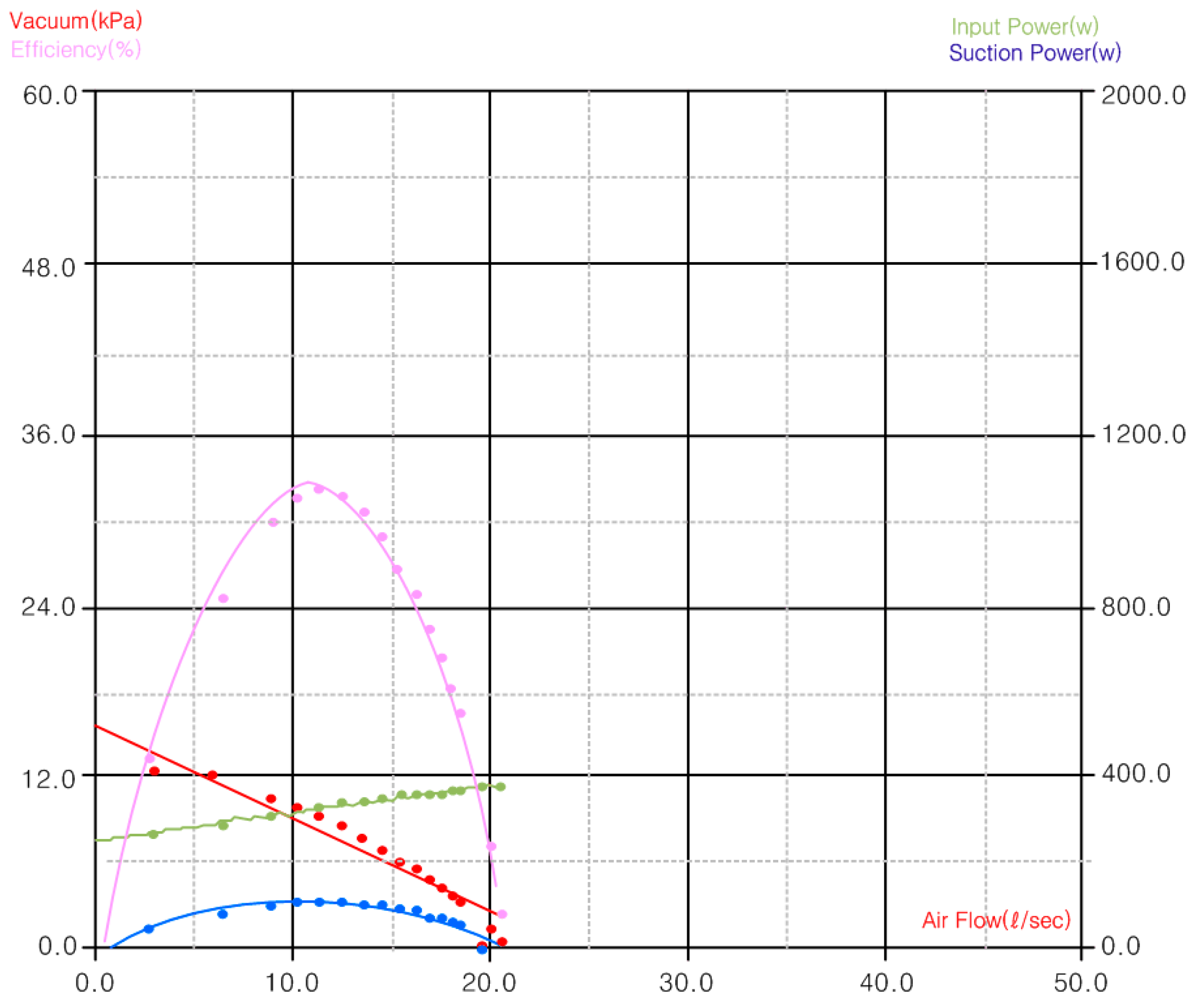
5.2. Driving Test of the Prototype Two-Phase 4/2 pole SRM and DC Motor
6. Conclusions
Author Contributions
Conflicts of Interest
References
- Miller, T.J.E. Converter volt-ampere requirements of the switched reluctance motor drive. IEEE Trans. 1985, 5, 1136–1144. [Google Scholar] [CrossRef]
- Krishnan, R.; Materu, P. Design of a single-switch-per-phase converter for switched reluctance motor drives. IEEE Trans. 1990, 37, 469–476. [Google Scholar] [CrossRef]
- Wallace, R.S.; Taylor, D.G. A balanced commutator for switched reluctance motors to reduce torque ripple. IEEE Trans. Power Electron. 1992, 7, 617–626. [Google Scholar] [CrossRef]
- Wallace, R.S.; Taylor, D.G. Low torque ripple switched reluctance motors for direct drive robotics. IEEE Trans. Robot. Autom. 1991, 7, 733–742. [Google Scholar] [CrossRef]
- Krishnamurthy, M.; Edrington, C.S.; Emadi, A.; Asadi, P.; Ehsani, M.; Fahimi, B. Making the case for applications of switched reluctance motor technology in automotive products. IEEE Trans. Power Electron. 2006, 21, 659–675. [Google Scholar] [CrossRef]
- Hu, Y.; Song, X.; Cao, W.; Ji, B. New SR drive with integrated charging capacity for plug-in hybrid electrical vehicles. IEEE Trans. Ind. Electron. 2014, 6, 5722–5731. [Google Scholar] [CrossRef]
- Bilgin, B.; Emadi, A.; Krishnamurthy, M. Design consideration of switched reluctance machines with higher number of rotor poles. IEEE Trans. Ind. Electron. 2012, 59, 3745–3756. [Google Scholar] [CrossRef]
- Dos Santos, F.L.M.; Anthonis, J.; Naclerio, F.; Gyselinck, J.J.C.; van der Auweraer, H. Multiphysics NVH modeling: Simulation of a switched reluctance motor for an electrical vehicle. IEEE Trans. Ind. Electron. 2014, 61, 469–476. [Google Scholar] [CrossRef]
- Miller, T.J.E.; McGilp, M. Nonlinear theory of the switched reluctance motor for rapid computer-aided design. IEEE Proc. B 1990, 137, 337–347. [Google Scholar] [CrossRef]
- Emadi, A.; Young, L.J.; Rajashekara, K. Power electronics and motor drives in electric, hybrid electric and plug-in hybrid electric vehicles. IEEE Trans. Ind. Electron. 2008, 55, 2237–2245. [Google Scholar] [CrossRef]
- Xue, X.D.; Cheng, K.W.E.; Cheung, N.C. Multi-objective optimization design of in-wheel switched reluctance motors in electric vehicles. IEEE Trans. Ind. Electron. 2010, 57, 2980–2987. [Google Scholar] [CrossRef]
- Krishnan, R.; Arumugan, R.; Lindsay, J.F. Design Procedure for Switched Reluctance Motors. IEEE Trans. Ind. Appl. 1988, 24, 456–461. [Google Scholar] [CrossRef]
- Komatsuzaki, Y. Cross current for parallel operating three-phase inverter. IEEE Power Electron. Spec. Conf. 1994, 943–950. [Google Scholar]
- Pollock, C.; Willams, B.W. Power convertor circuit for switched reluctance motors with the minimum number of switches. IEEE Proc. B 1990, 137, 373–384. [Google Scholar] [CrossRef]
- Schramm, D.S.; Williams, B.W.; Green, T.C. Torque ripple reduction of switched reluctance motors by phase current optimal profiling. Proc. IEEE PESC 1992, 2, 857–860. [Google Scholar]
- Orthmann, R.; Schoner, H.P. Turn-off angle control of switched reluctance motors for optimum torque output. Proc. EPE 1993, 6, 20–55. [Google Scholar]
- Chen, L.; Mercorelli, P.; Liu, S. A Kalman Estimator for Detecting Repetitive Disturbances. In Proceedings of the IEEE American control conference, Portland, OR, USA, 8–10 June 2005.
- Mercorelli, P. An Adaptive and Optimized Switching Observer for Sensorless Control of an Electromagnetic Valve Actuator in Camless Internal Combustion Engines. Asian J. Control. 2014, 16, 959–973. [Google Scholar] [CrossRef]
- Mercorelli, P. An Anti-Saturating Adaptive Pre-action and a Slide Surface to Achieve Soft Landing Control for Electromagnetic Actuators. IEEE/ASME Trans. Mech. 2012, 17, 76–85. [Google Scholar] [CrossRef]
- Chladny, R.R.; Koch, C.R. Flatness-Based Tracking of an Electromechanical VVT Actuator with Disturbance Observer Feed-Forward Compensation. IEEE Trans. Control Syst. Technol. 2008, 16, 652–663. [Google Scholar] [CrossRef]
- Mercorelli, P.; Lehmann, K.; Liu, S. Robust flatness based control of an electromagnetic linear actuator using adaptive PID controller. IEEE Conf. 2003, 4, 3790–3795. [Google Scholar]
- De Santos, E.; Di Benedetto, M.D.; Pola, G. On Observability and Detectability of continuous-tim Switching Linear Systems. In Proceedings of the 42nd IEEE Conference on Decision and Control, CDC 03, Maui, HI, USA, 9–12 December 2003.
- Fabbrini, A.; Garulli, A.; Mercorelli, P. Trajectory Generation Algorithm for Optimal Consumption in Electromagnetic Actuators. IEEE Trans. Control Syst. Technol. 2012, 20, 1025–1032. [Google Scholar] [CrossRef]
- Velasco, C.I.H.; di Gaeta, A. Valve Position-based Control at Engine Key-on of an Electromechanical Valve Actuator for Camless Engines: A Robust Controller Tuning via Bifurcation Analysis. Asian J. Control 2016, 18, 868–887. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | DC Motor | SRM |
|---|---|---|
| Input Voltage [V] | 24 | 24 |
| Input Current [A] | 16 | 13 |
| Rated Power [W] | 350 | 300 |
| Rated Speed [rpm] | 32,000 | 32,000 |
| Suction Power [W] | 106 | 106 |
| Suction Efficiency [%] | 32 | 40 |
| Stator Out Diameter [mm] | 45 | 57.1 |
| Rotor Out Diameter [mm] | 29.2 | 25.4 |
| Slot [ea] | 2 | 4 |
| Resistance [ohm/25 °C] | 0.070 | 0.059 |
| Air Gap [mm] | 0.30 | 0.265 |
| Magnet [Br] | 0.42 |
| Parameter | Value (Target) | Unit | |
|---|---|---|---|
| Number of Stator Poles | Ns | 4 | ea |
| Number of Rotor Poles | Nr | 2 | ea |
| Stator Out Dimension | Ds | 57.1 | mm |
| Rotor Out Dimension | Dr | 23.949 | mm |
| Stator Pole Thickness | Cth | 9.7 | mm |
| Stator Pole Length | Ls | 10.596 | mm |
| Rotor Pole Length | Lr | 4 | mm |
| Air Gap Length | g | 0.286 | mm |
| Stack Length | Lstk | 5.93 | mm |
| No. of Turns/Poles | Tp | 40 | turn |
| No. of Turns/Phases | Tph | 80 | turn |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seon, H.-G.; Han, M.-S.; Ahn, H.-J.; Kim, J.; Lim, Y.-C. Efficiency Enhancement of a Low-Voltage Automotive Vacuum Cleaner Using a Switched Reluctance Motor. Energies 2016, 9, 692. https://doi.org/10.3390/en9090692
Seon H-G, Han M-S, Ahn H-J, Kim J, Lim Y-C. Efficiency Enhancement of a Low-Voltage Automotive Vacuum Cleaner Using a Switched Reluctance Motor. Energies. 2016; 9(9):692. https://doi.org/10.3390/en9090692
Chicago/Turabian StyleSeon, Han-Geol, Man-Seung Han, Hyun-Jin Ahn, Jaehyuck Kim, and Young-Cheol Lim. 2016. "Efficiency Enhancement of a Low-Voltage Automotive Vacuum Cleaner Using a Switched Reluctance Motor" Energies 9, no. 9: 692. https://doi.org/10.3390/en9090692