
Open Fault Detection and Tolerant Control for a Five Phase Inverter Driving System



Abstract
:1. Introduction
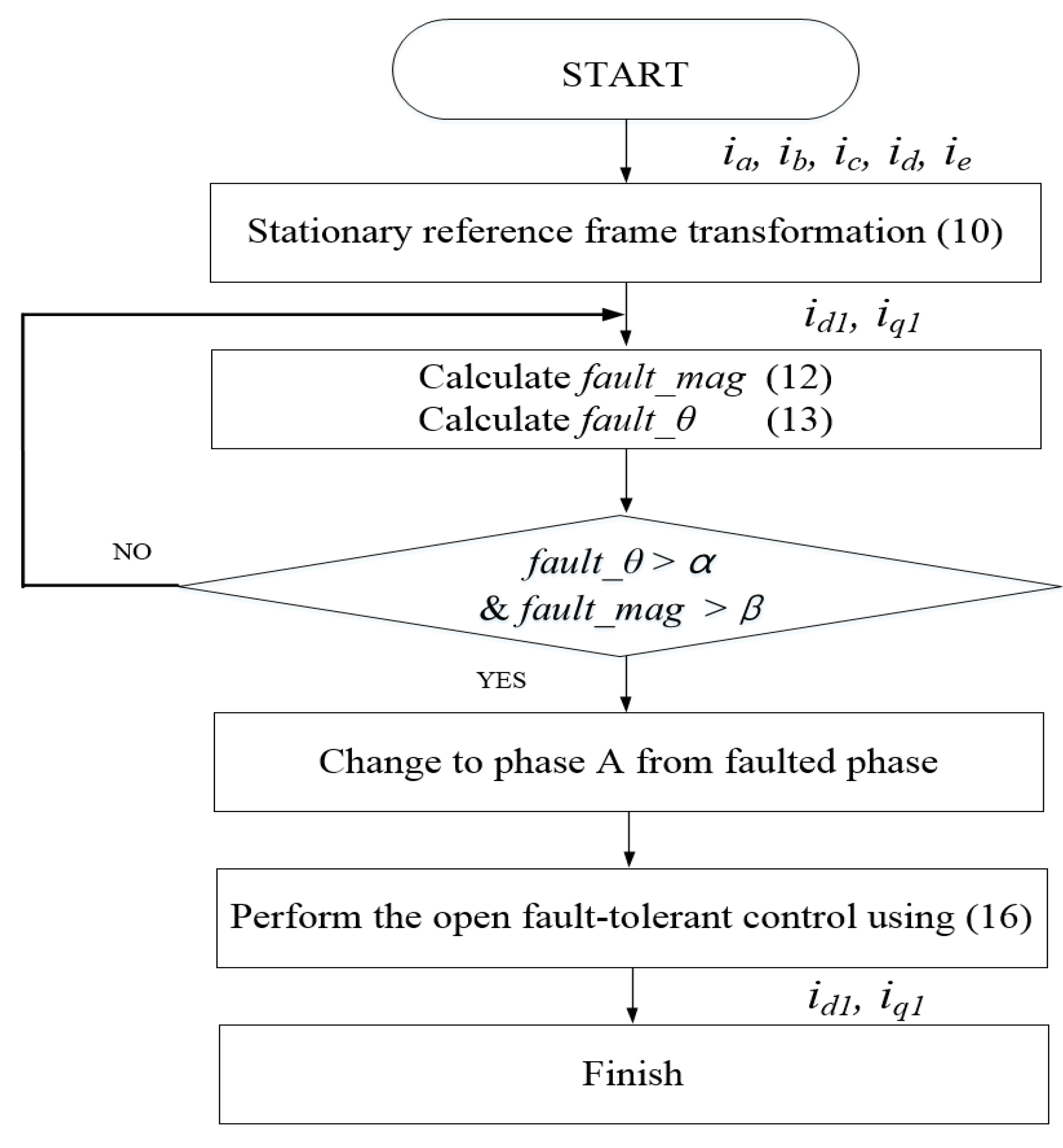
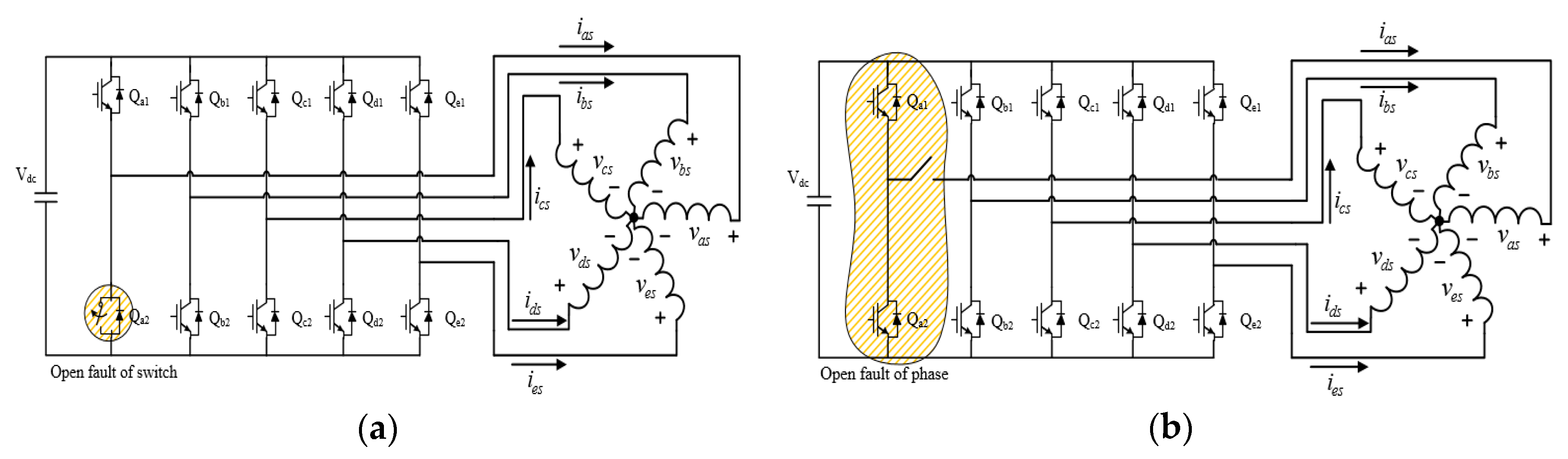
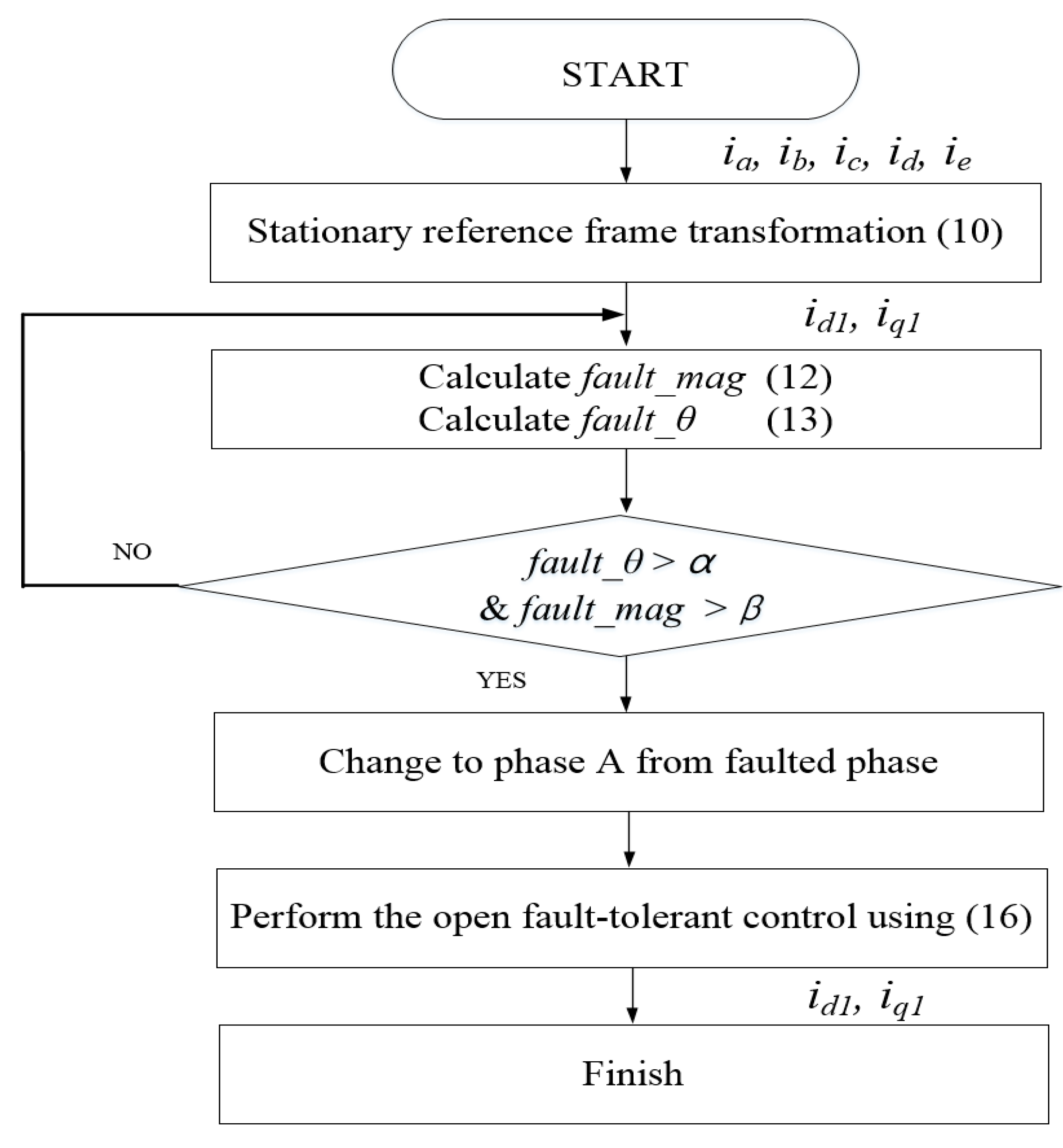
2. Proposed Fault Detection Method
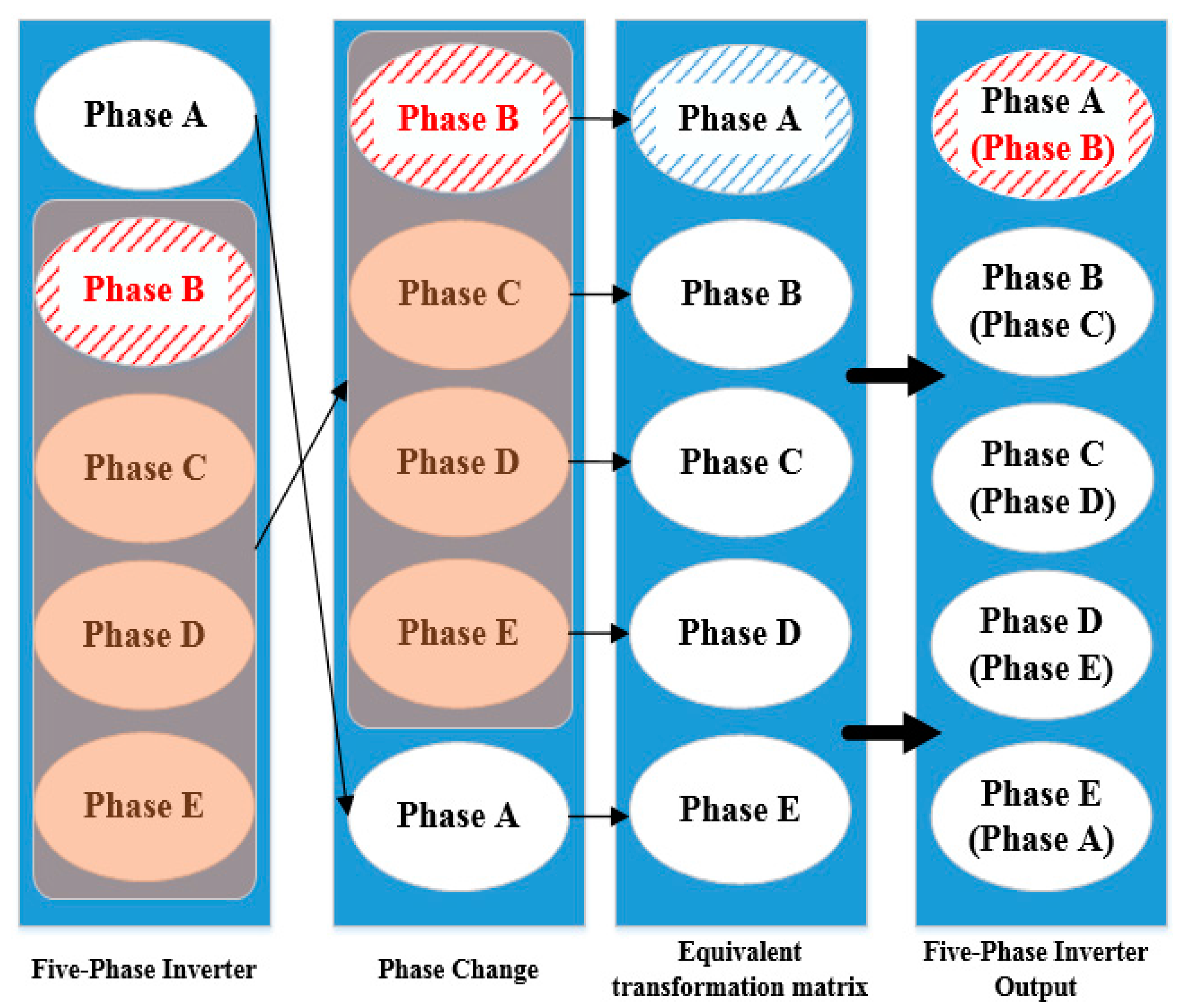
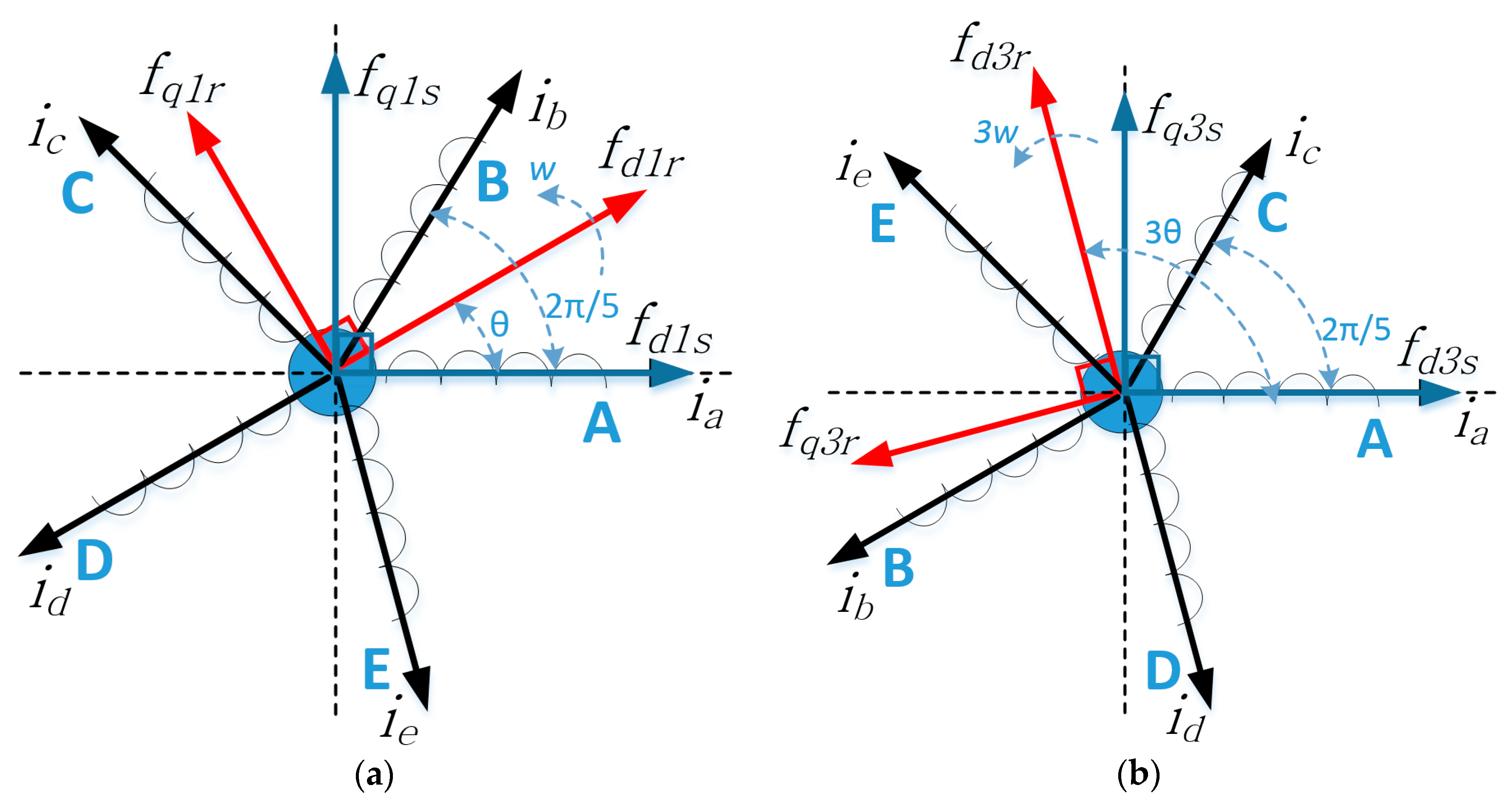
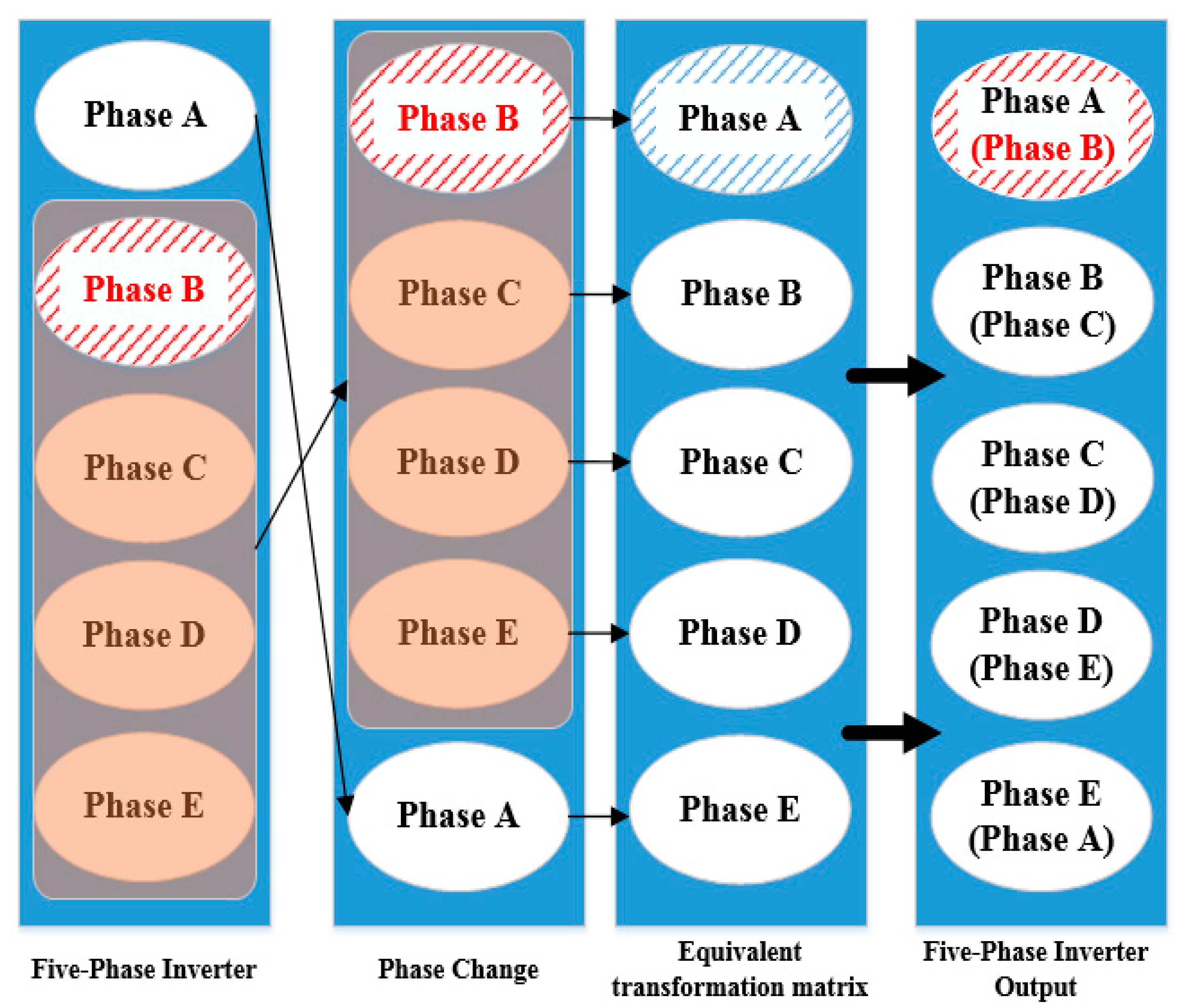
3. Proposed Fault-Tolerant Control Method
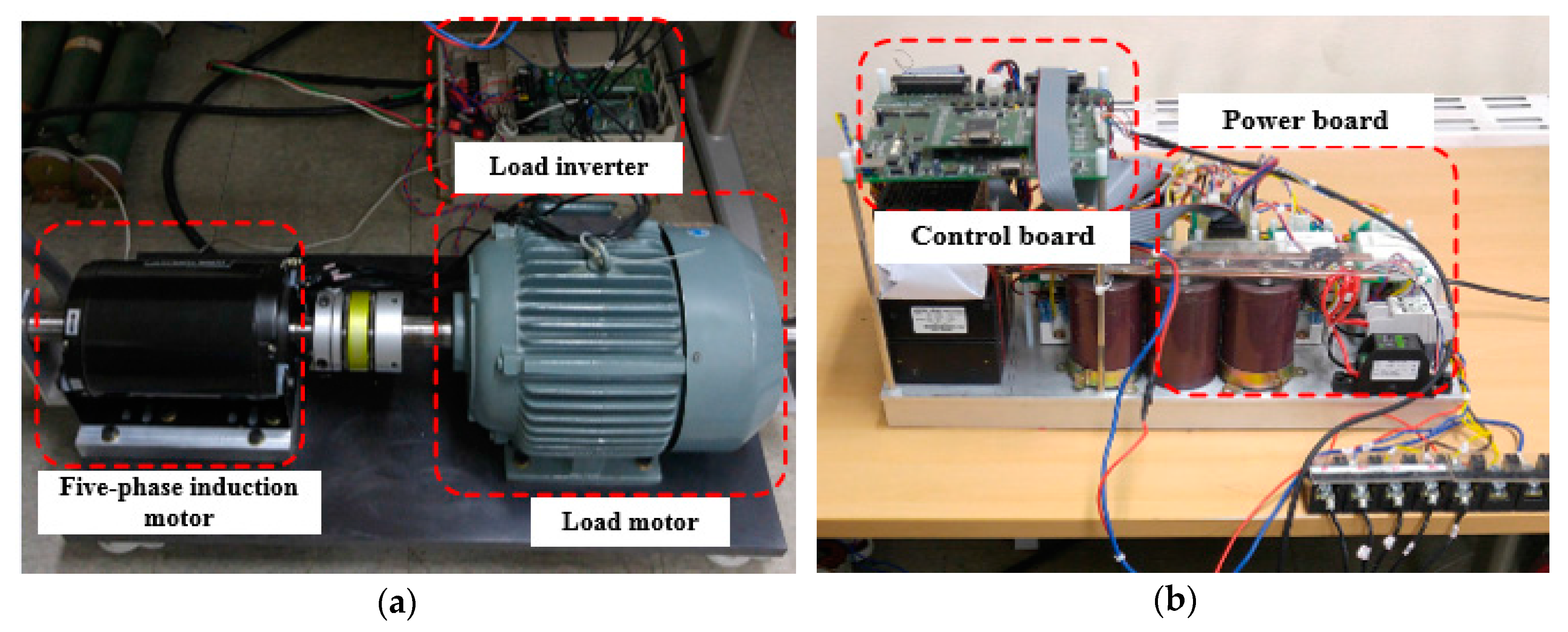
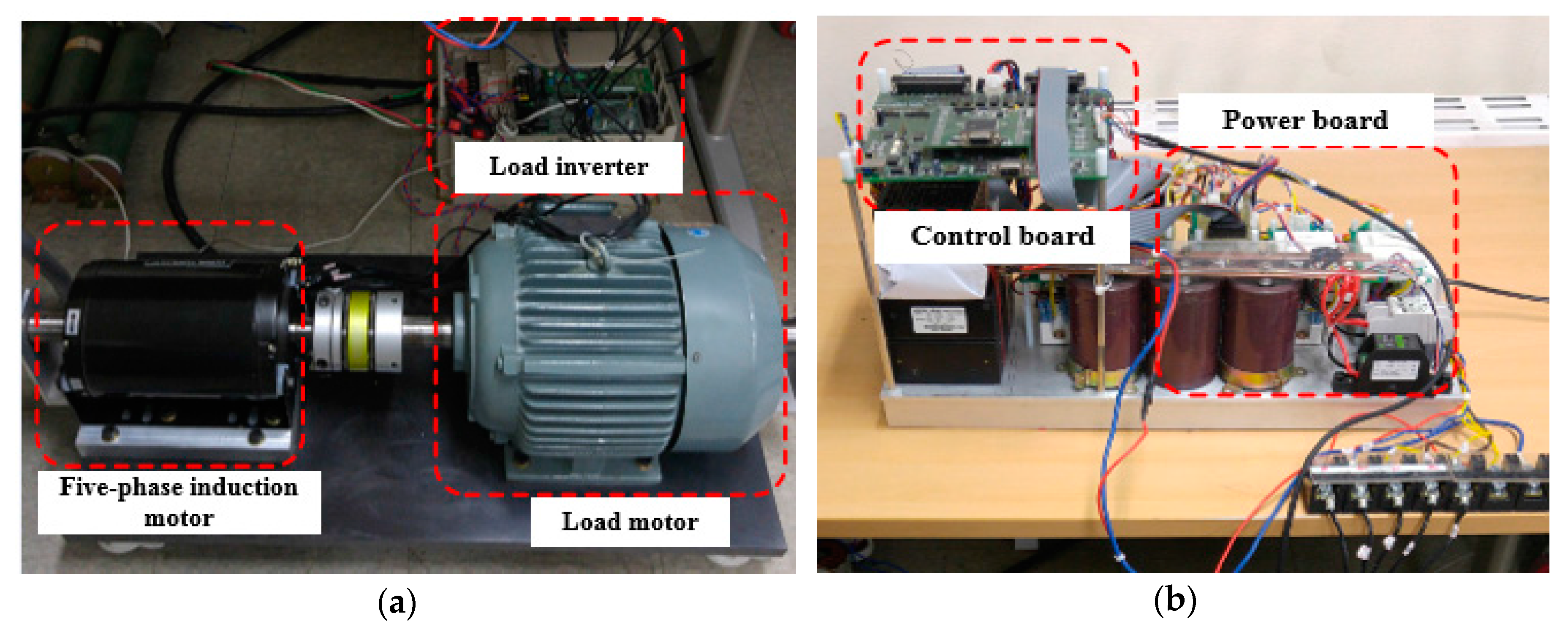
4. Simulation and Experiment Result
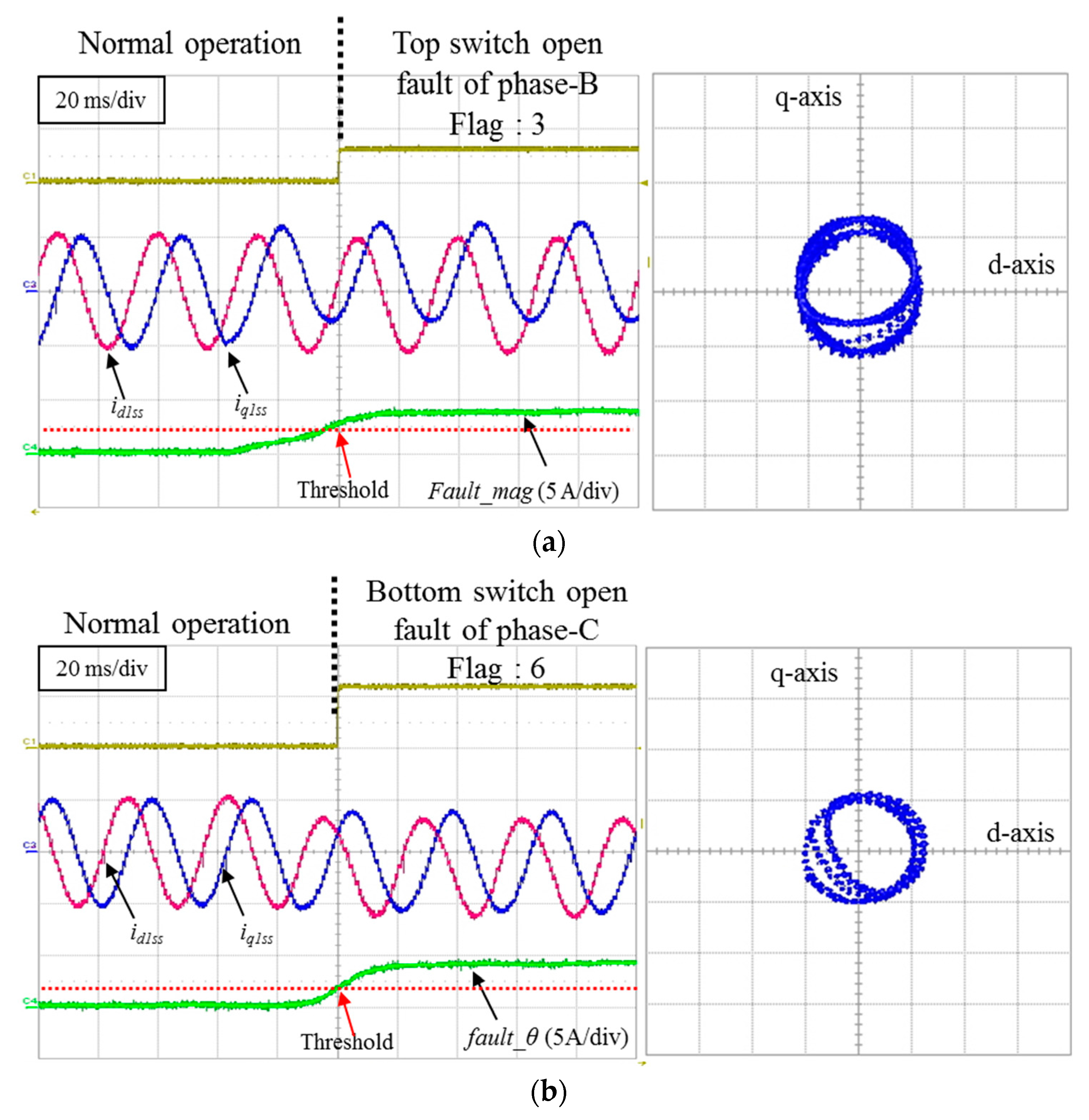
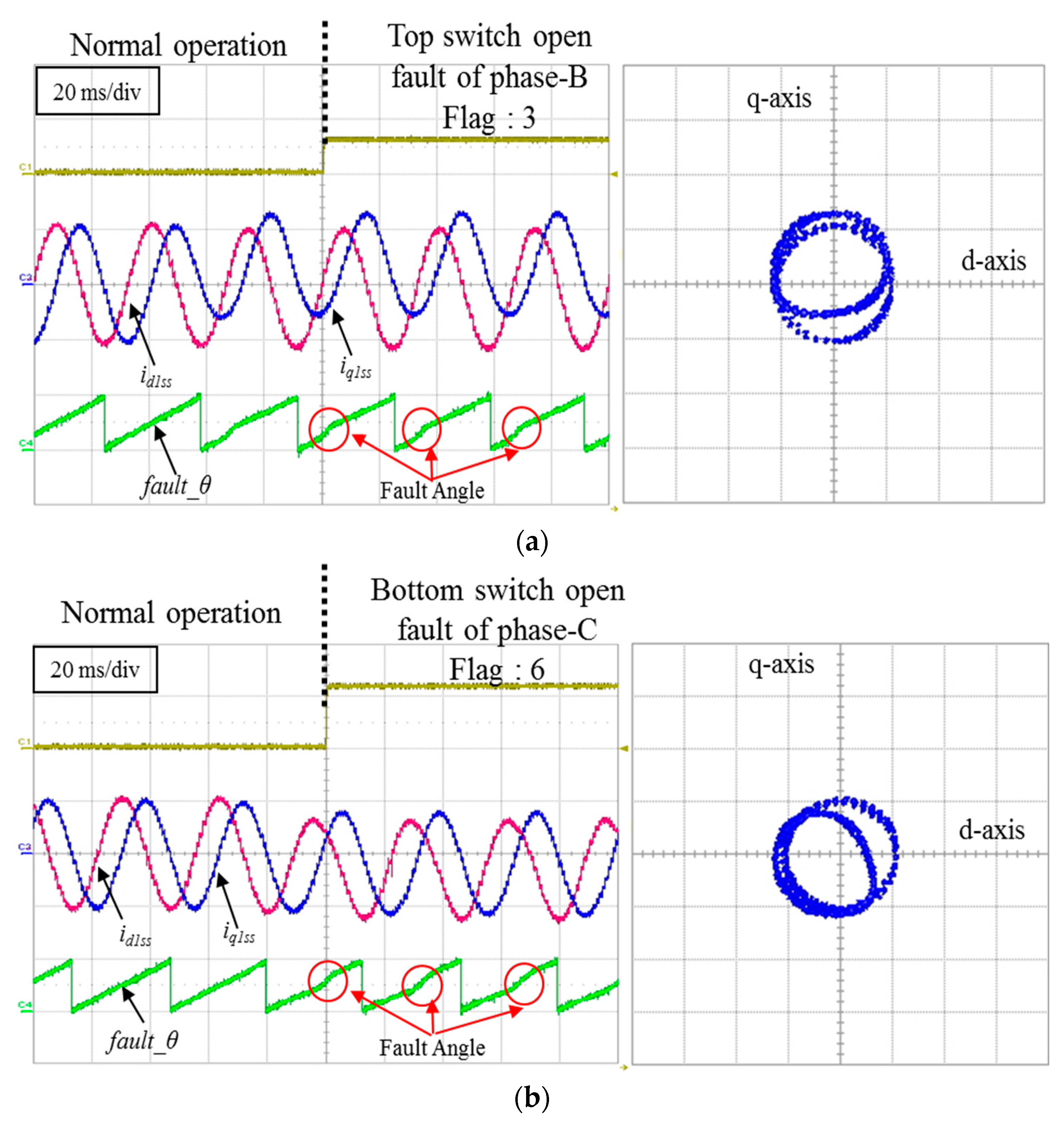
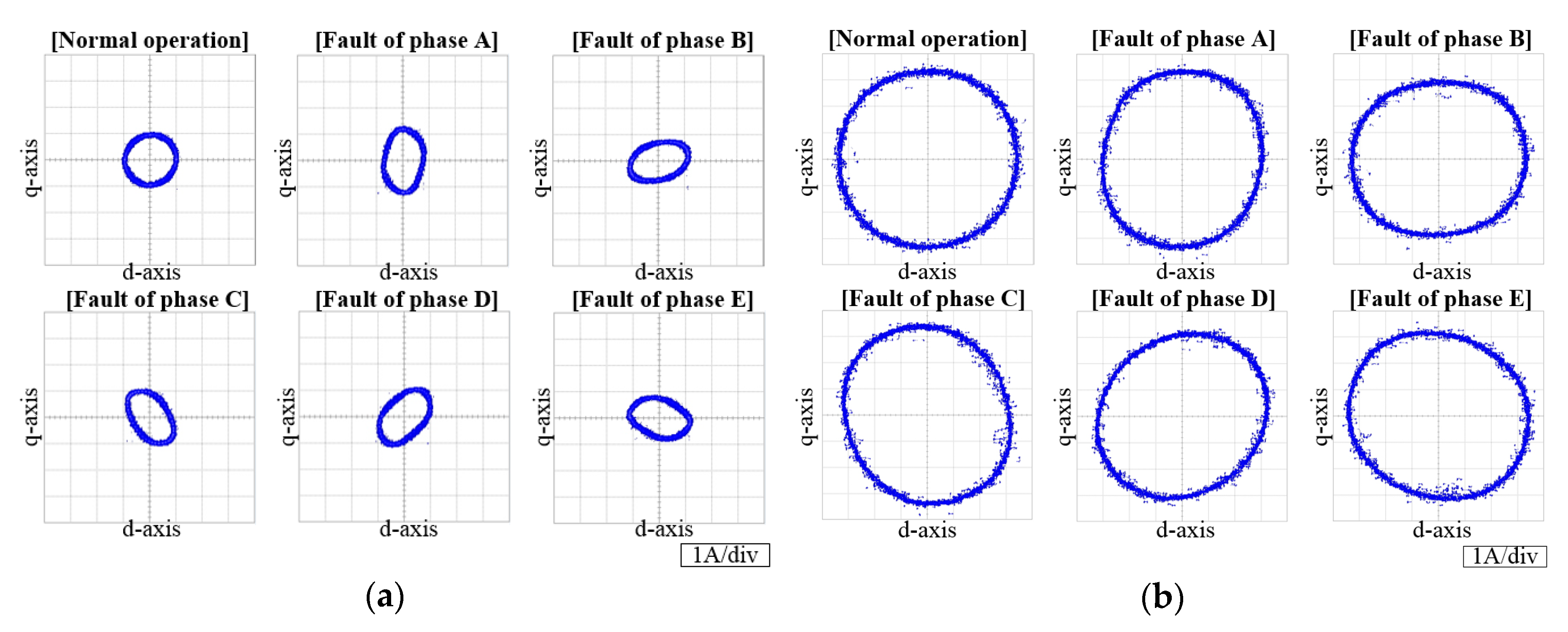
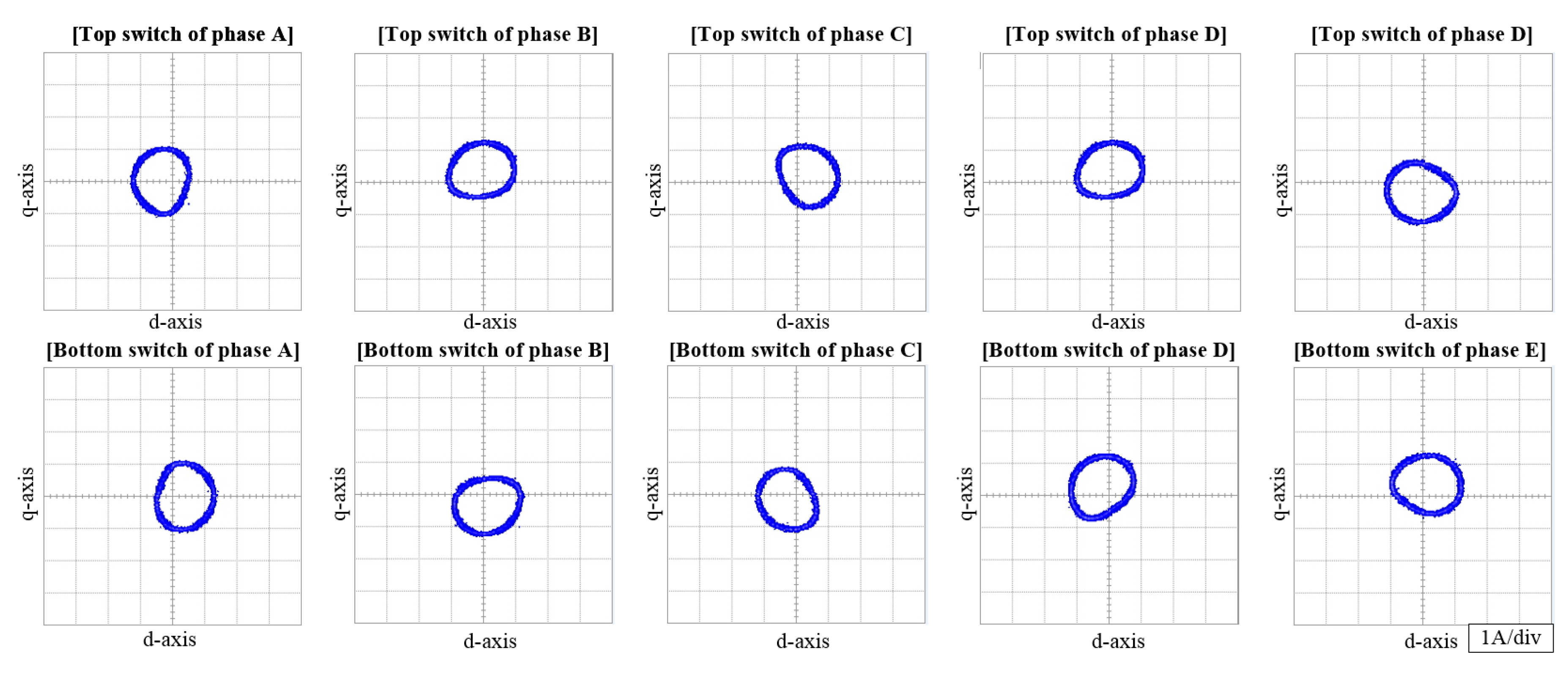
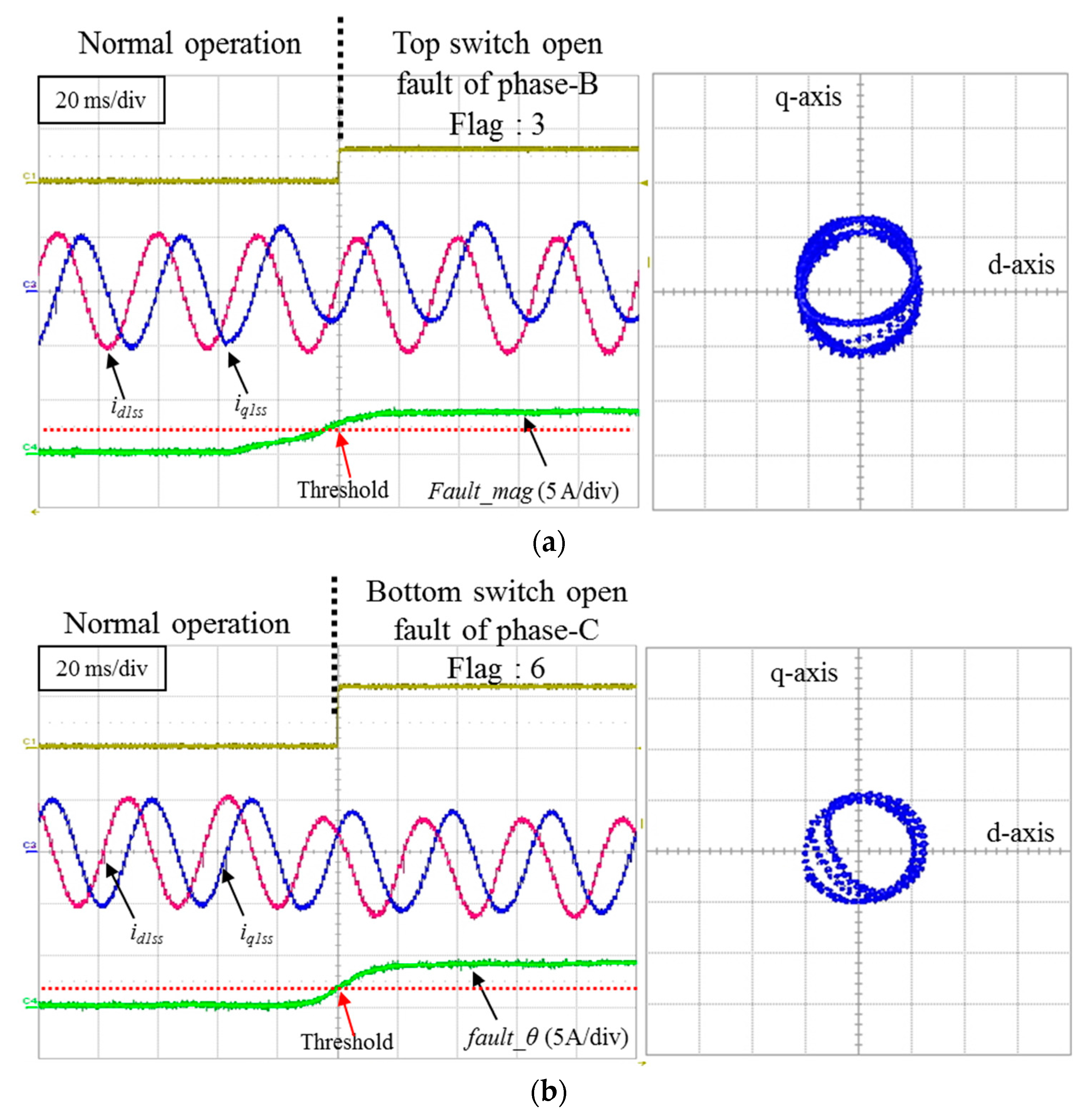
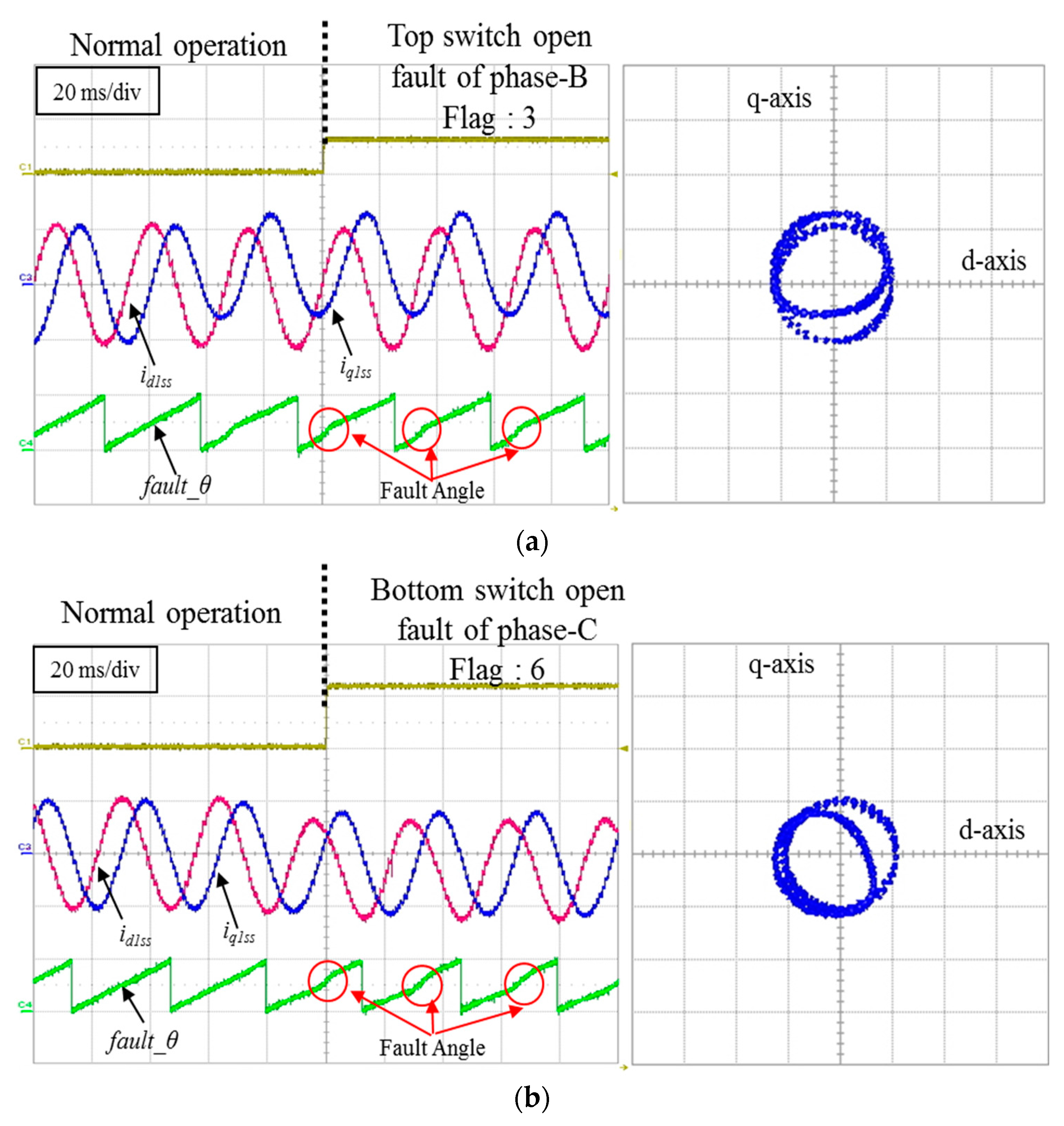
4.1. The Proposed Fault Detection Result
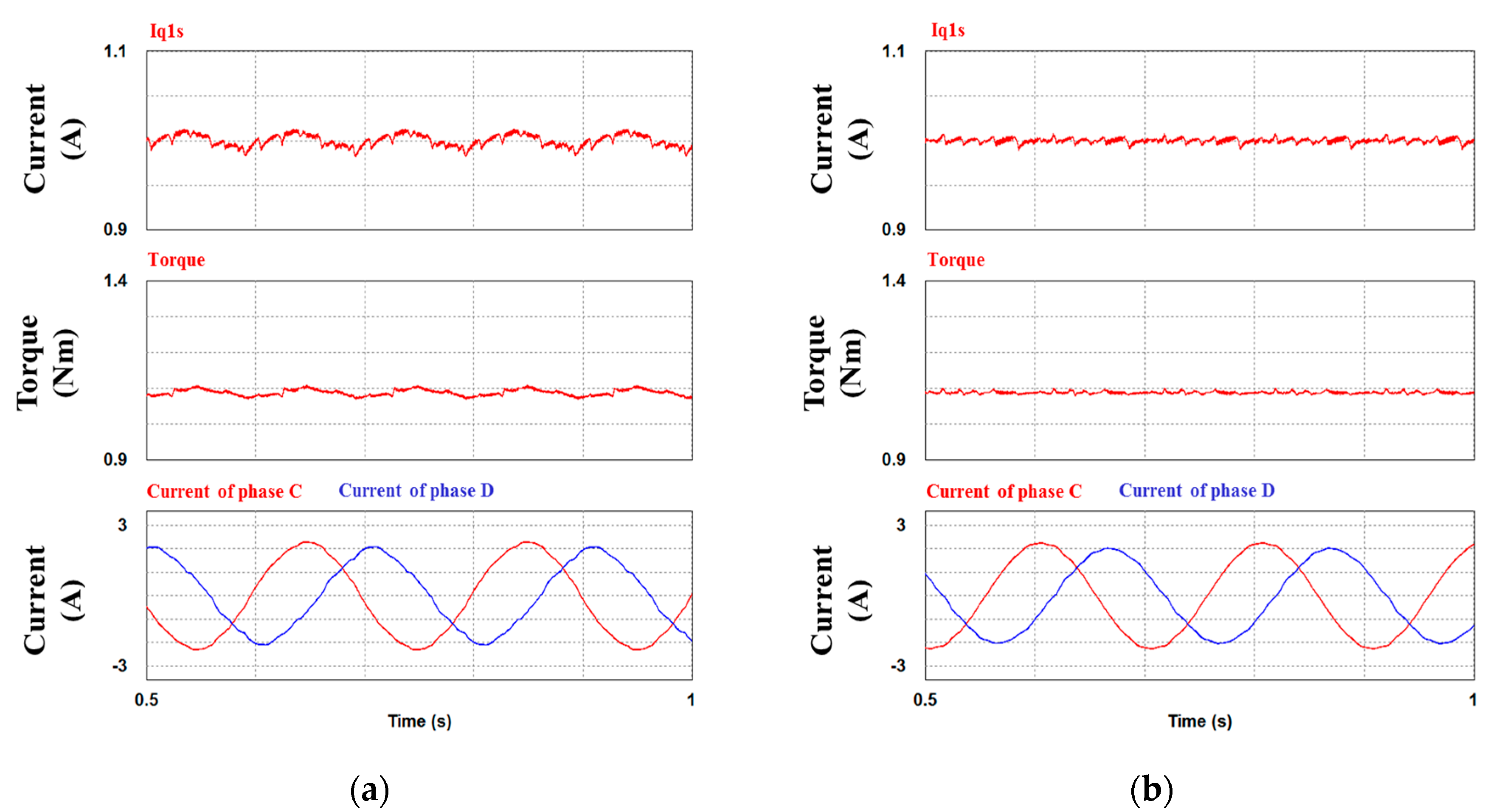
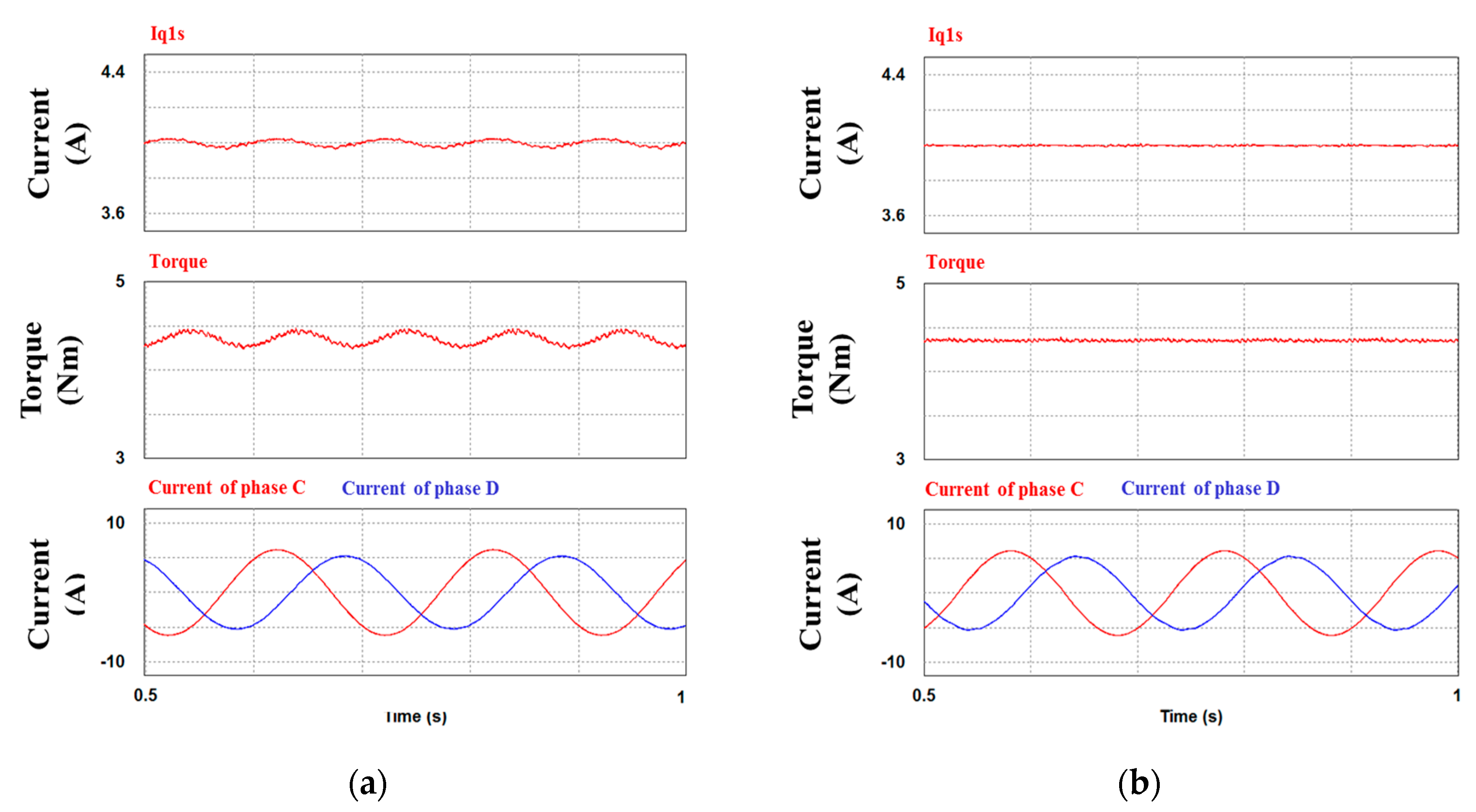
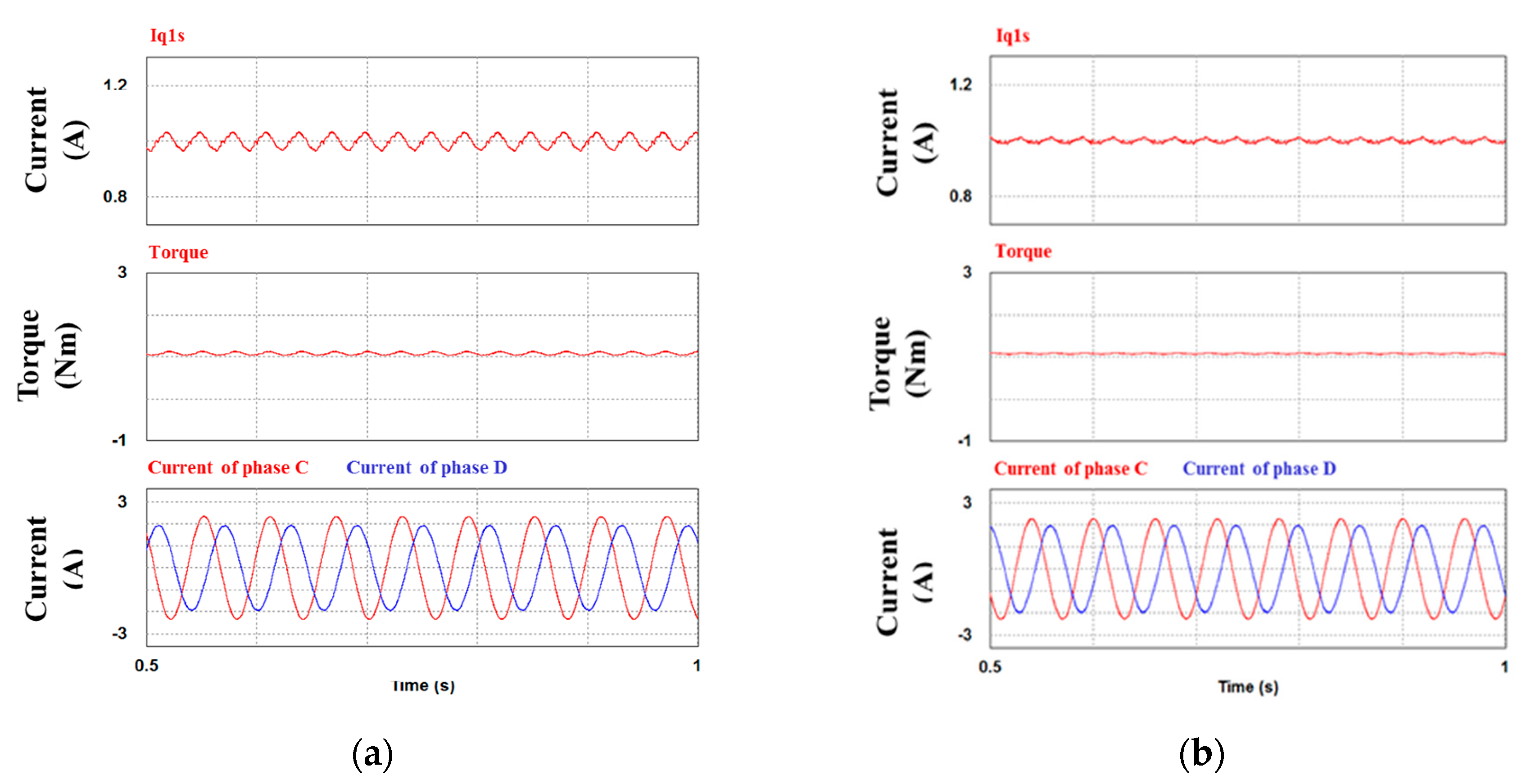
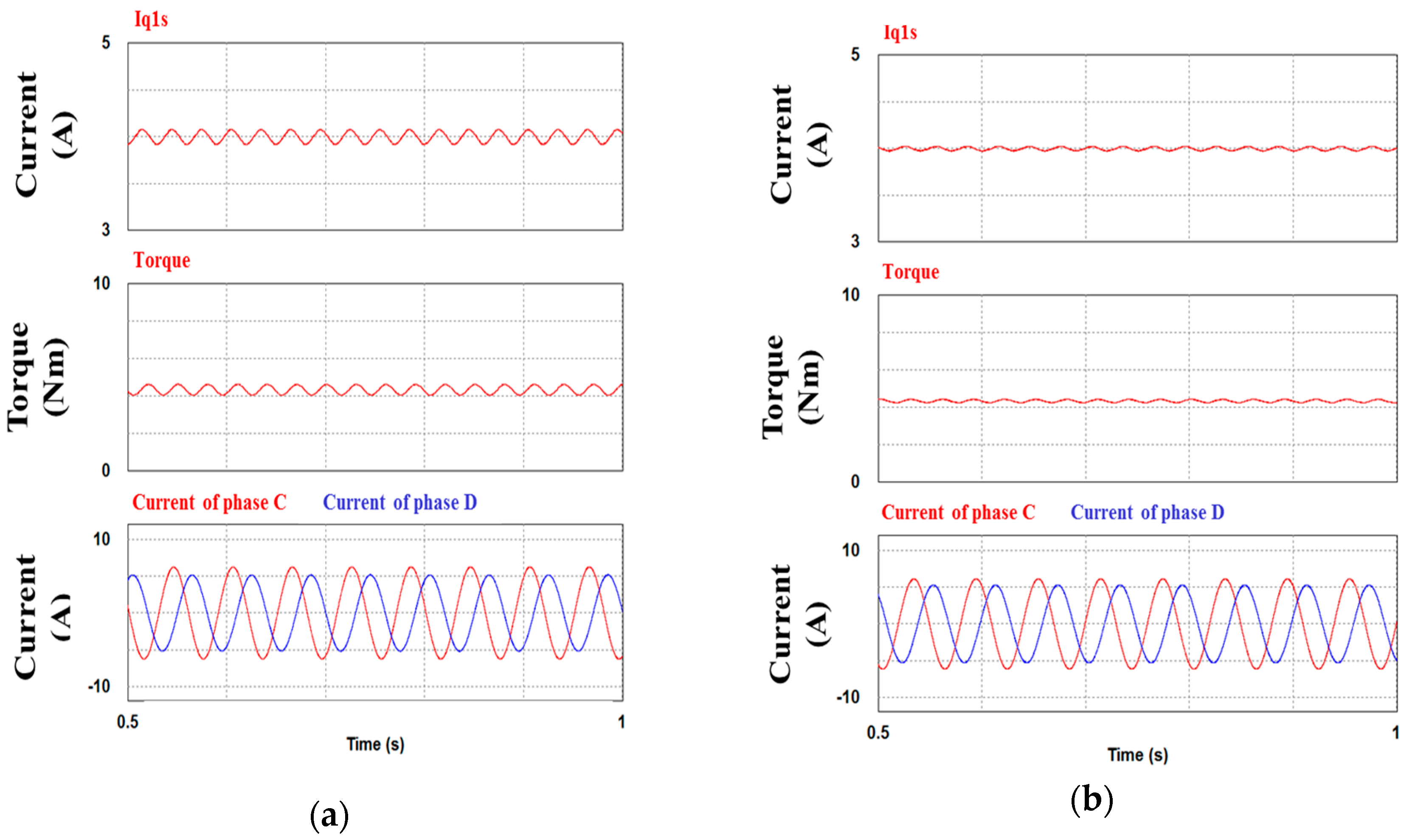
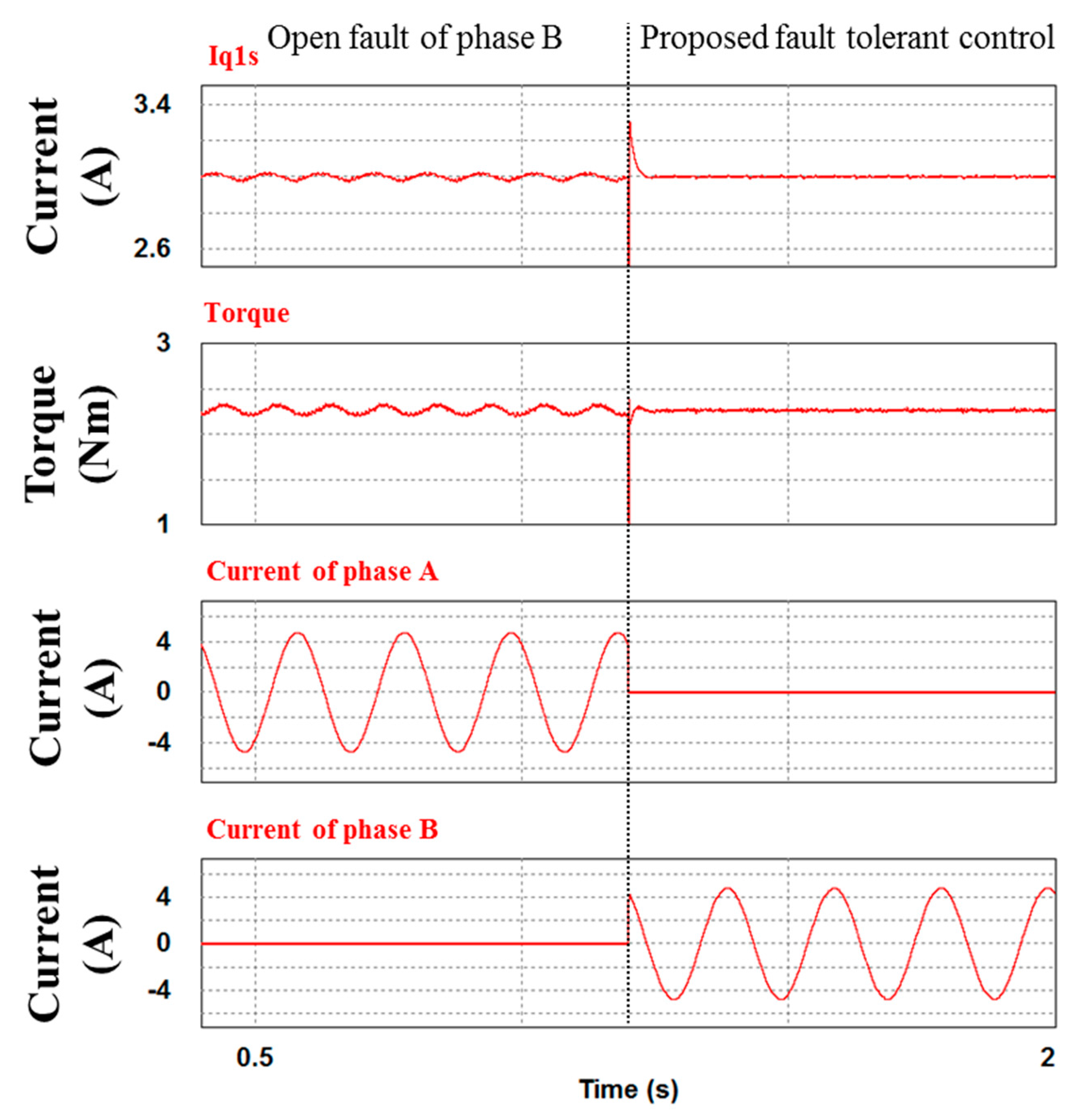
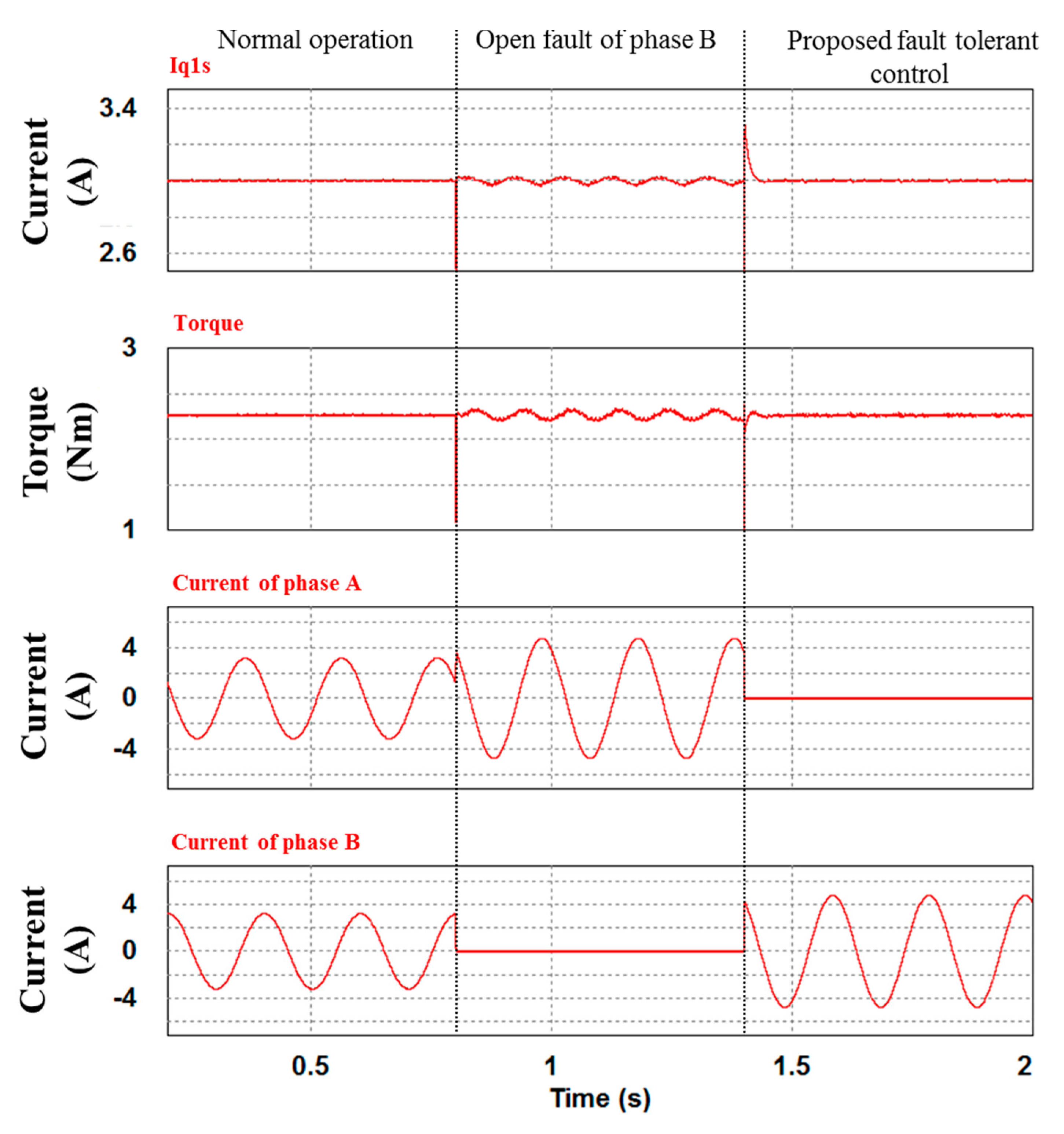
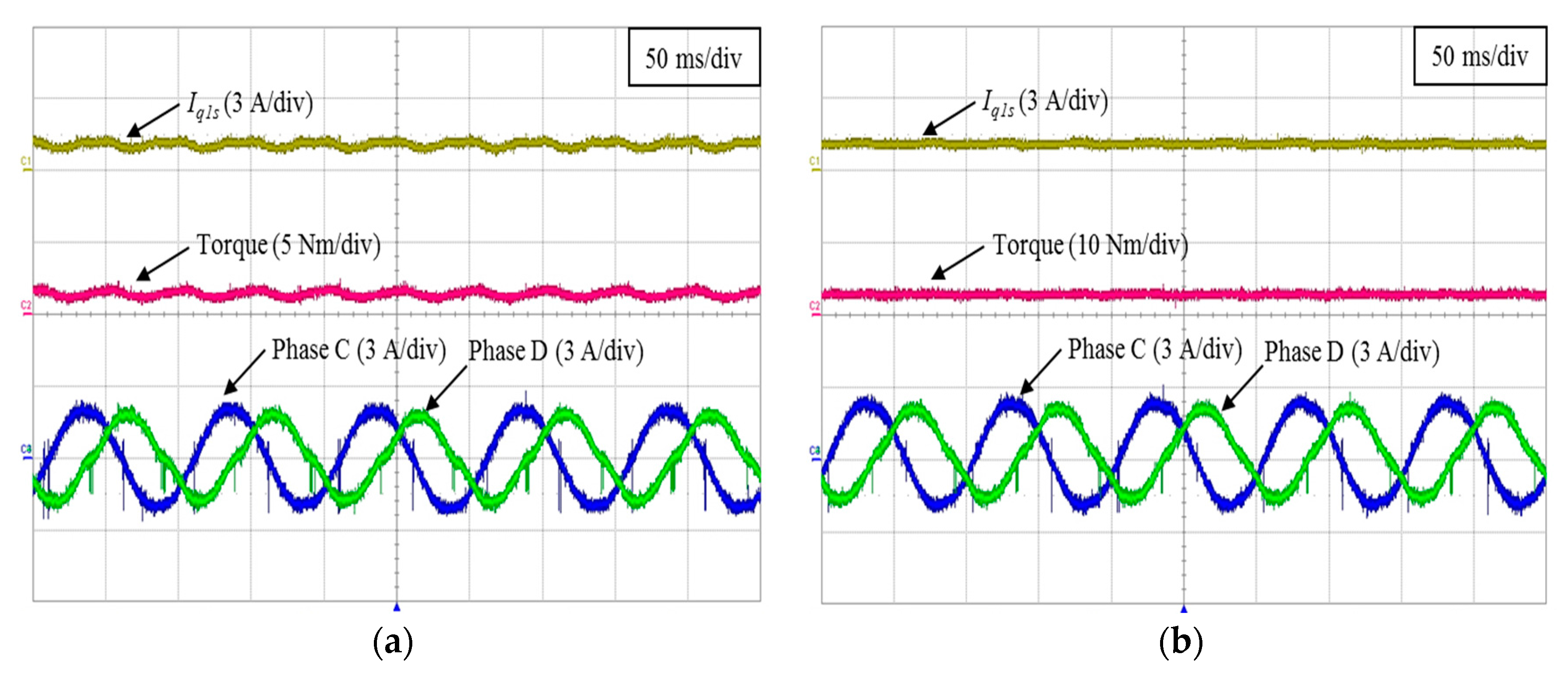
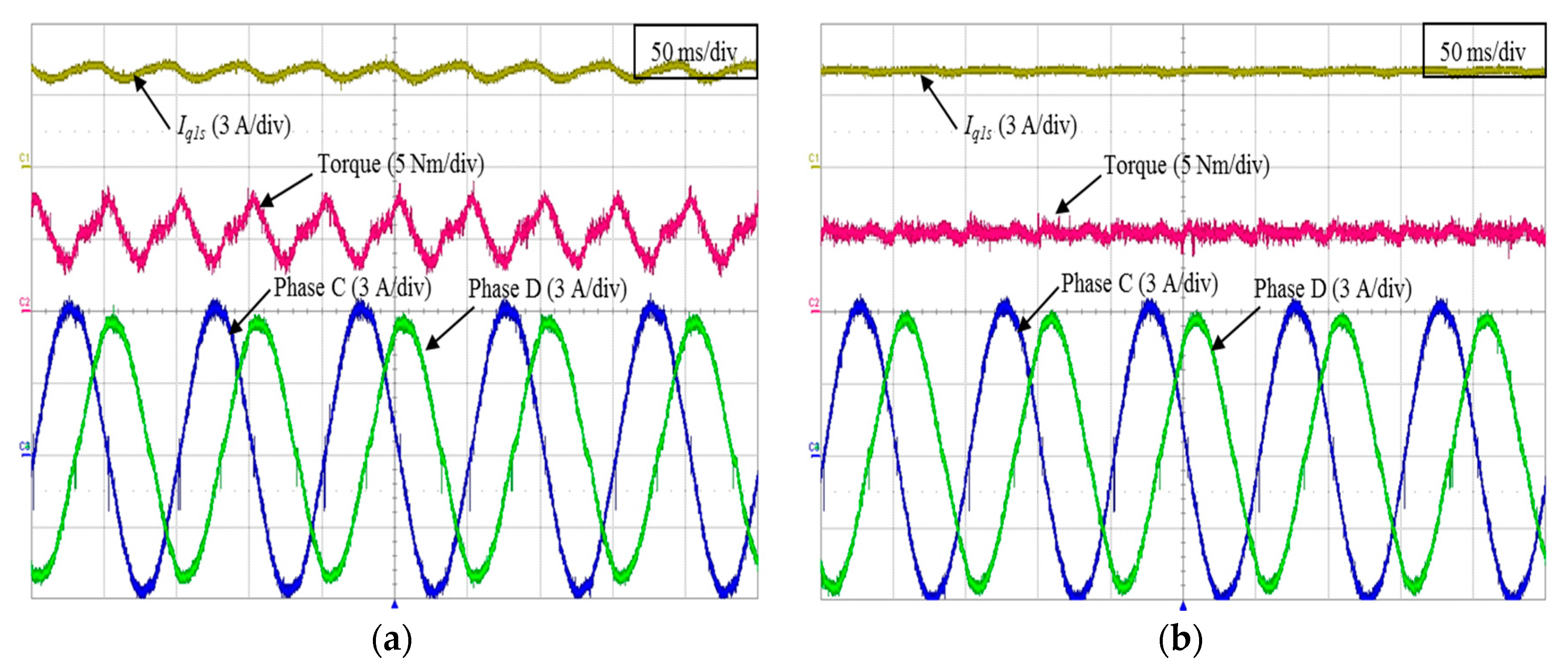
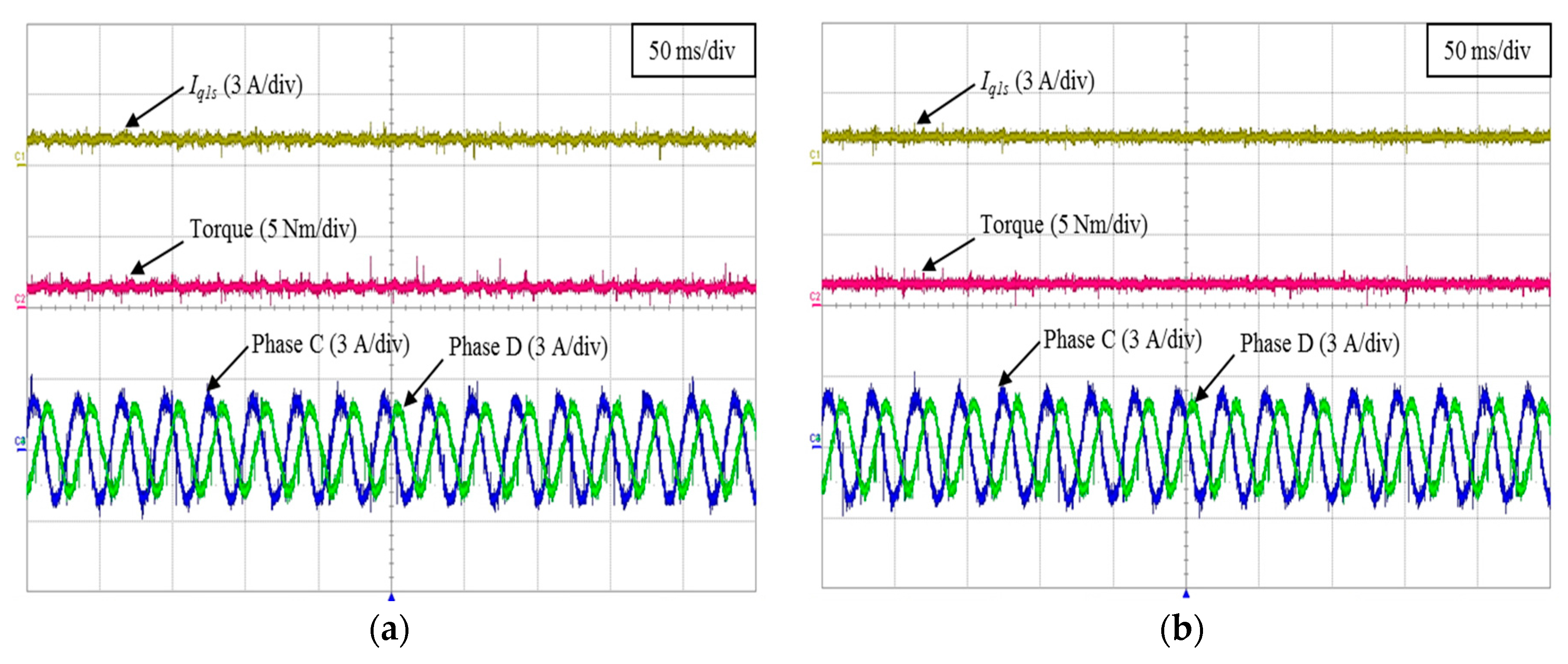
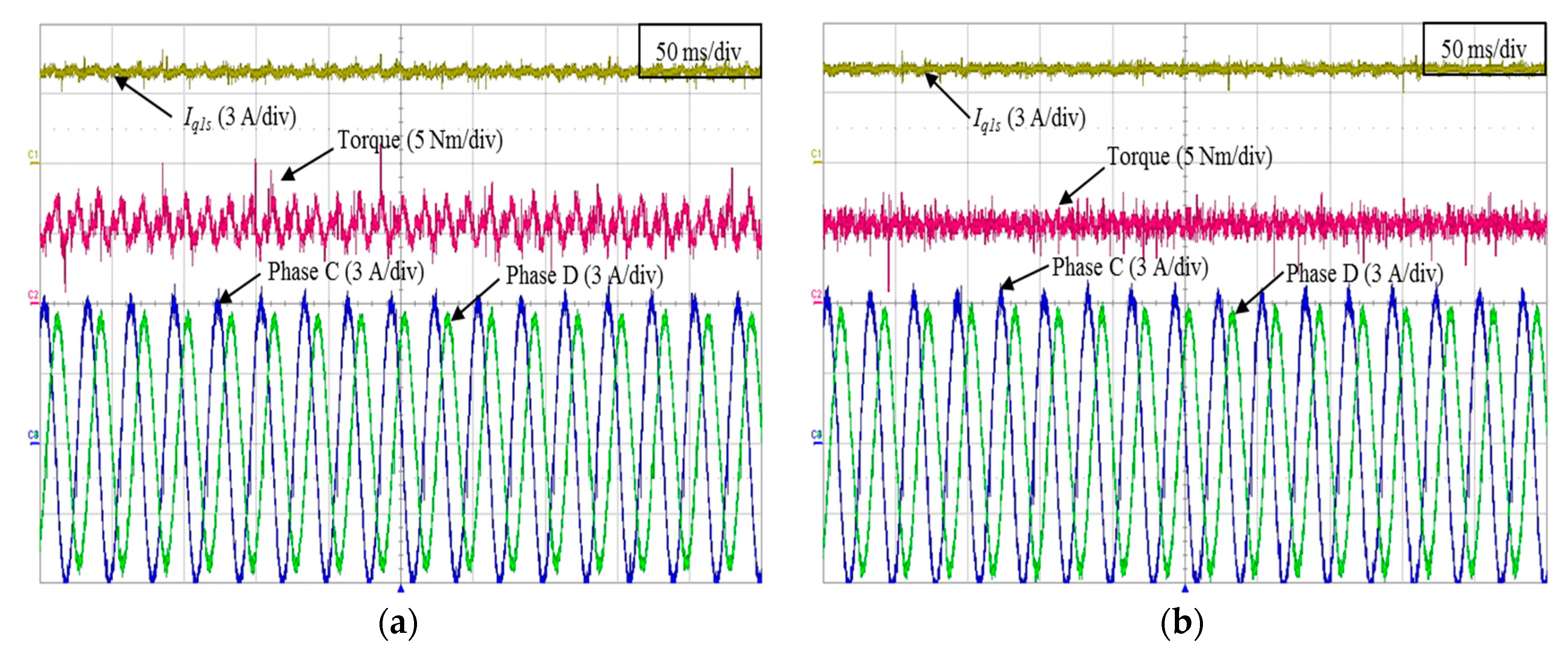
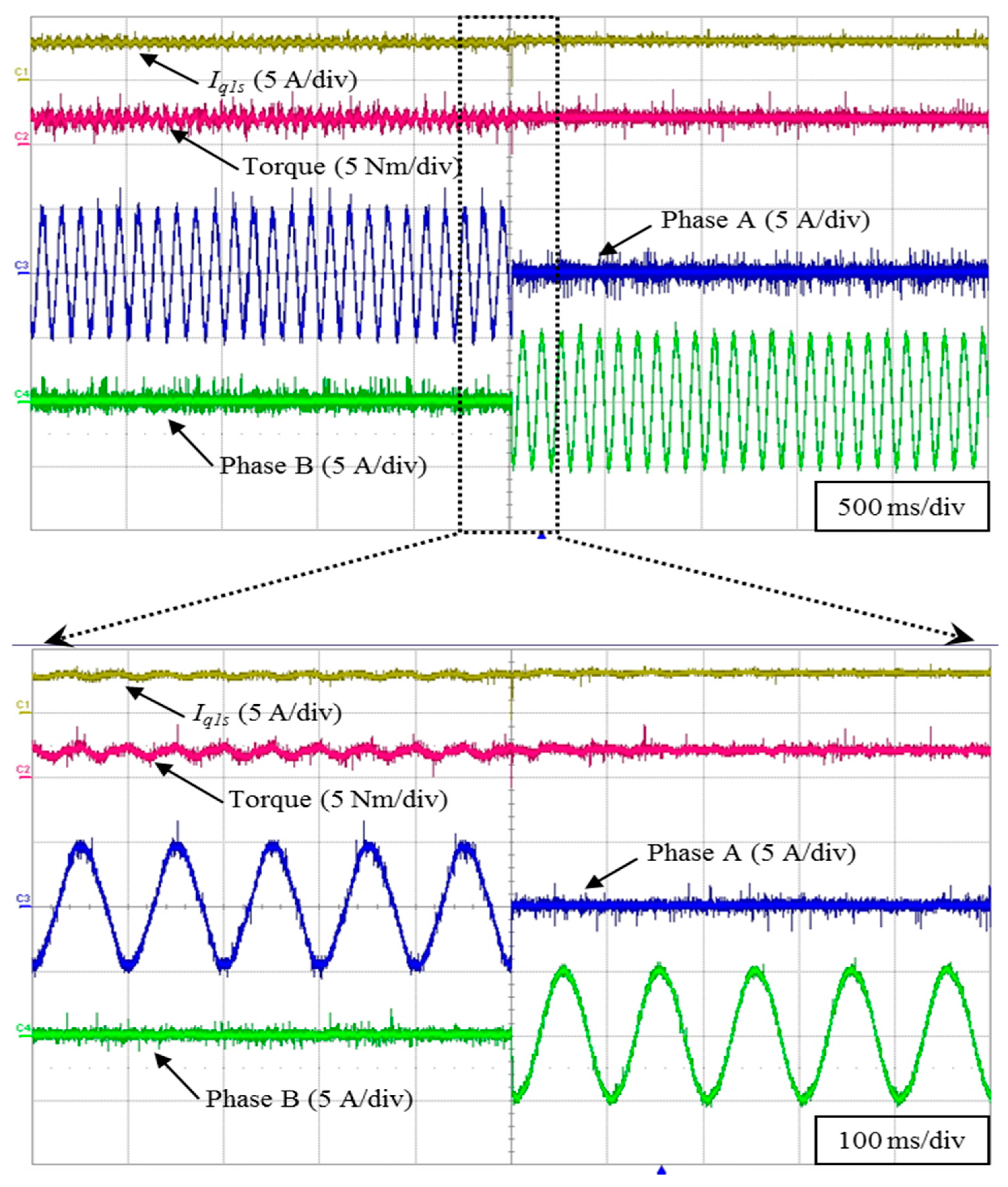
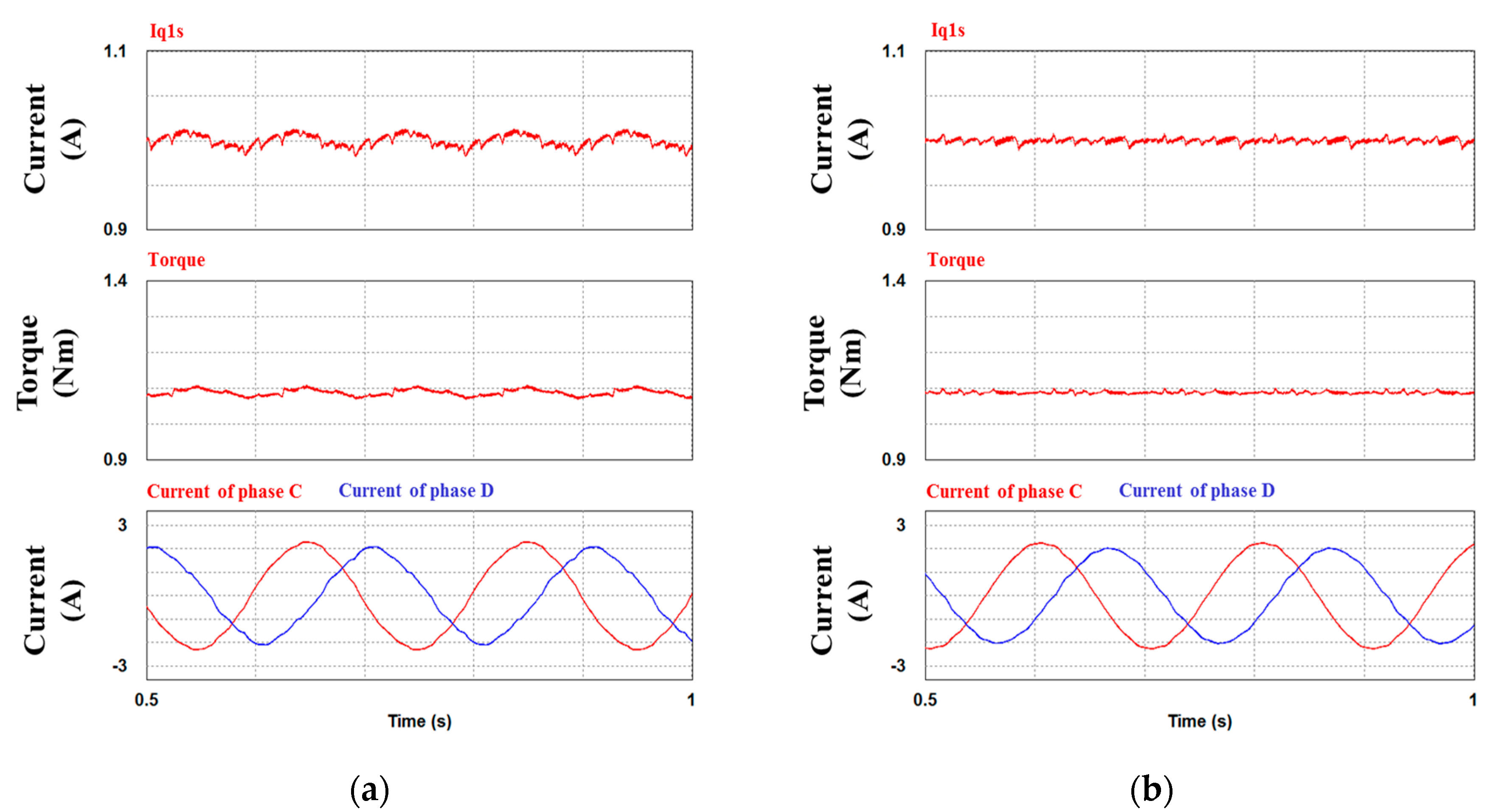
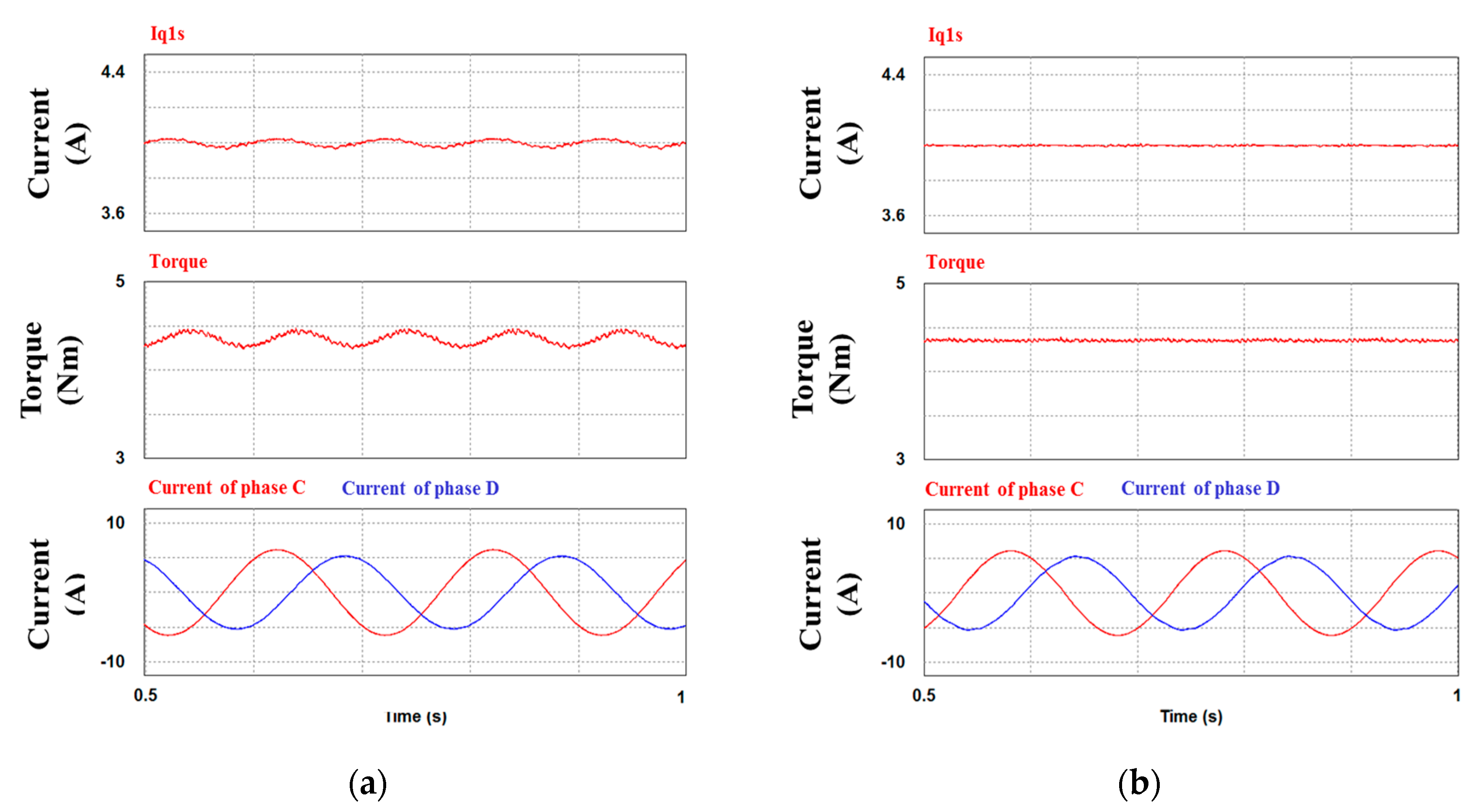
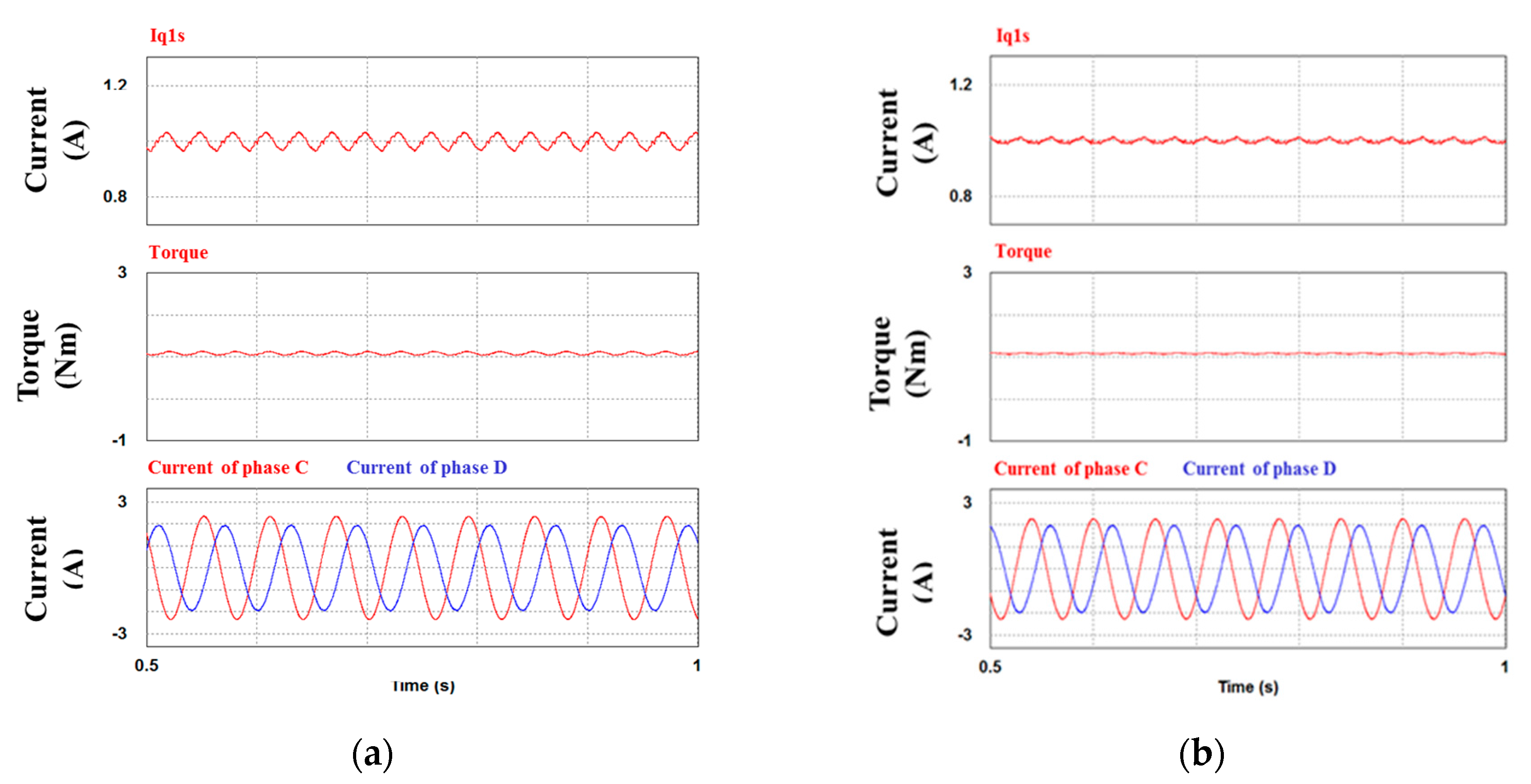
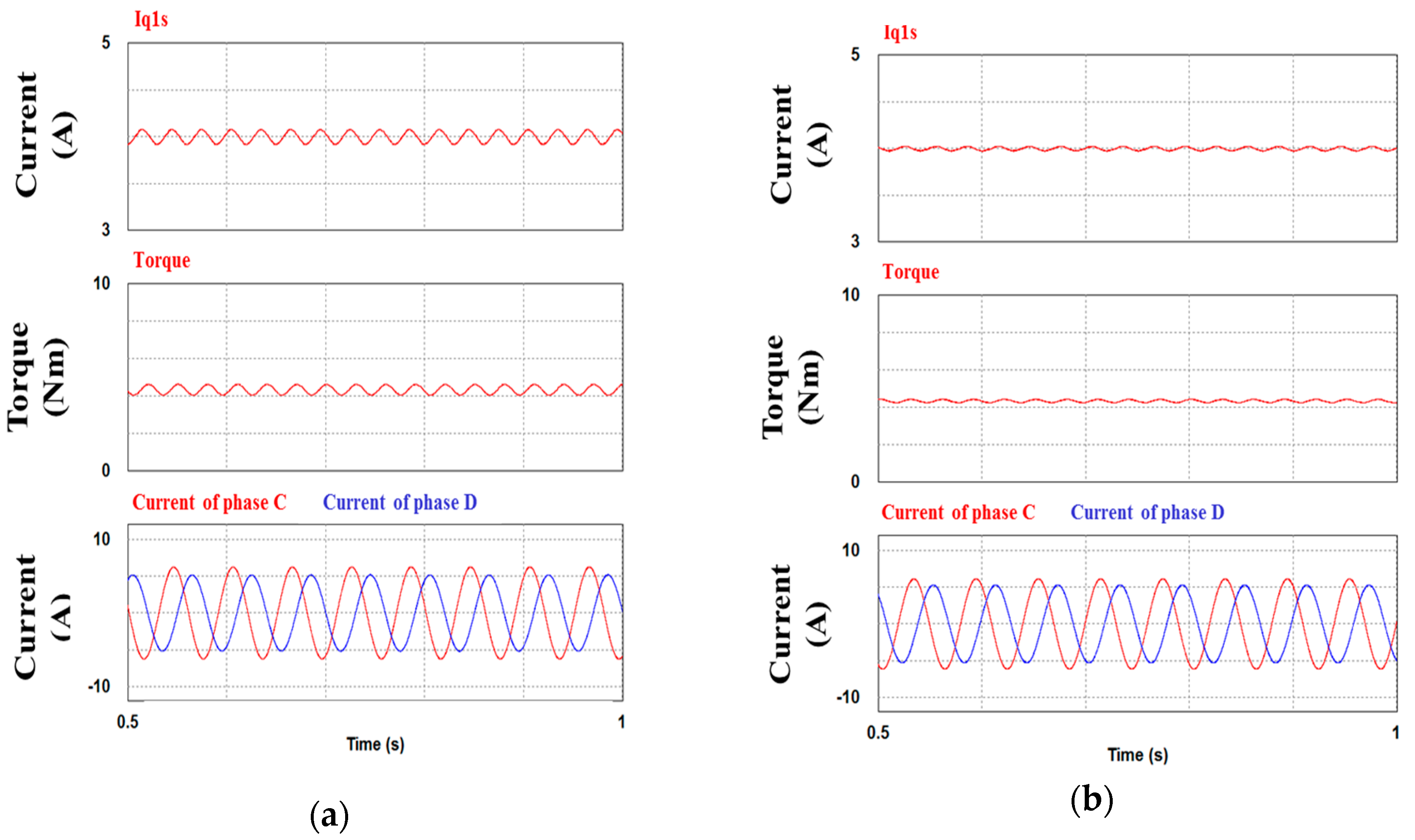
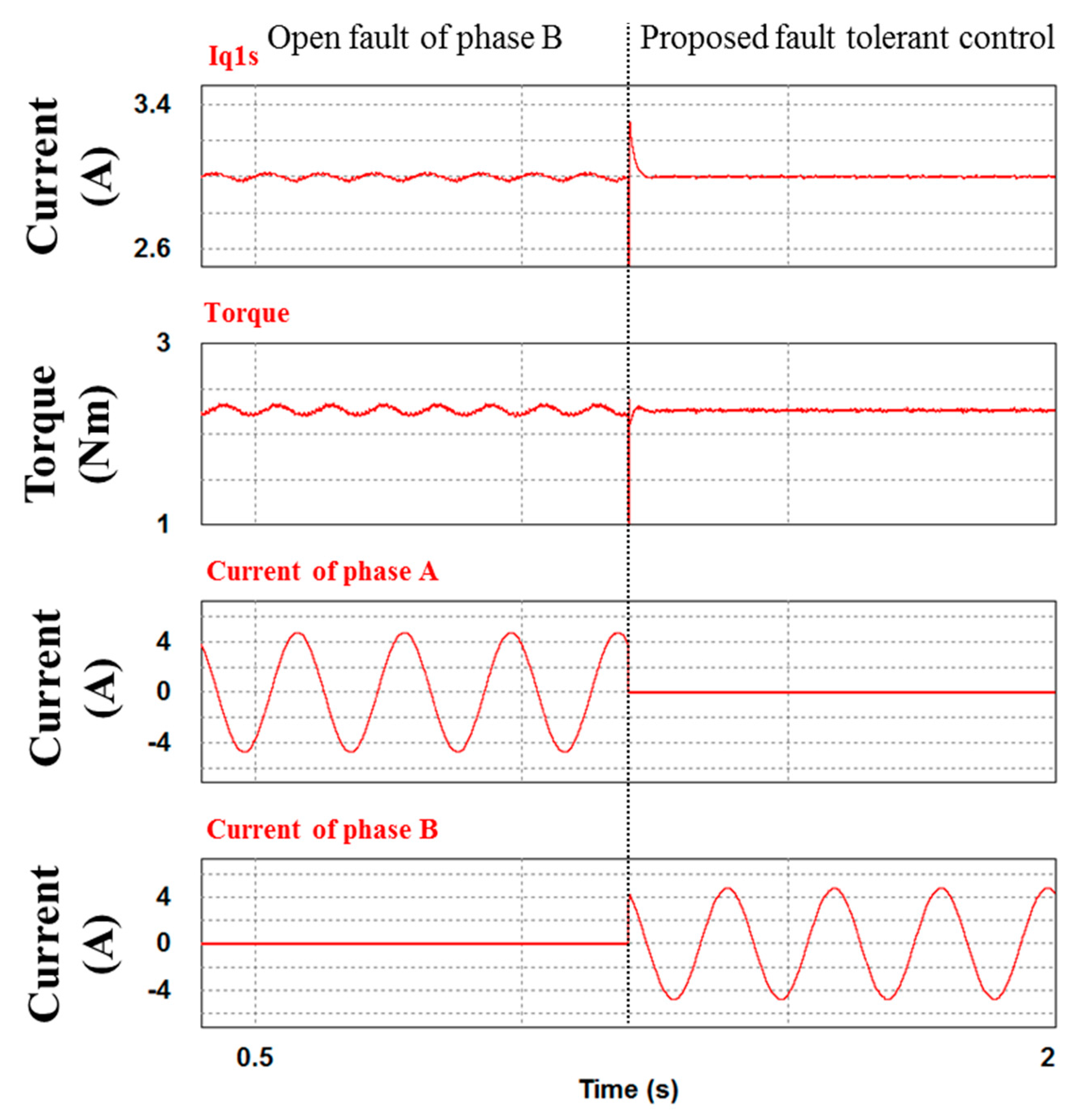
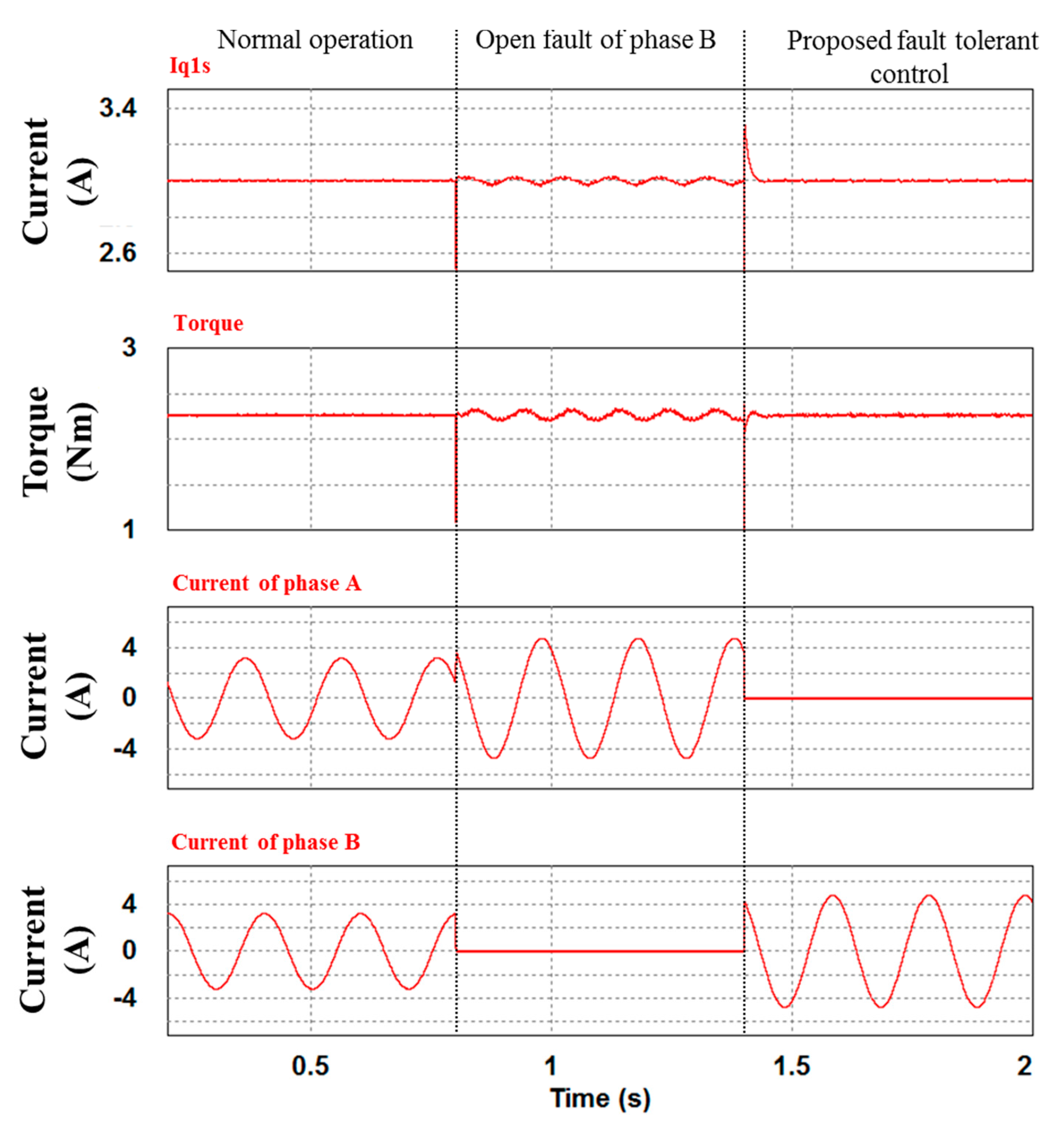
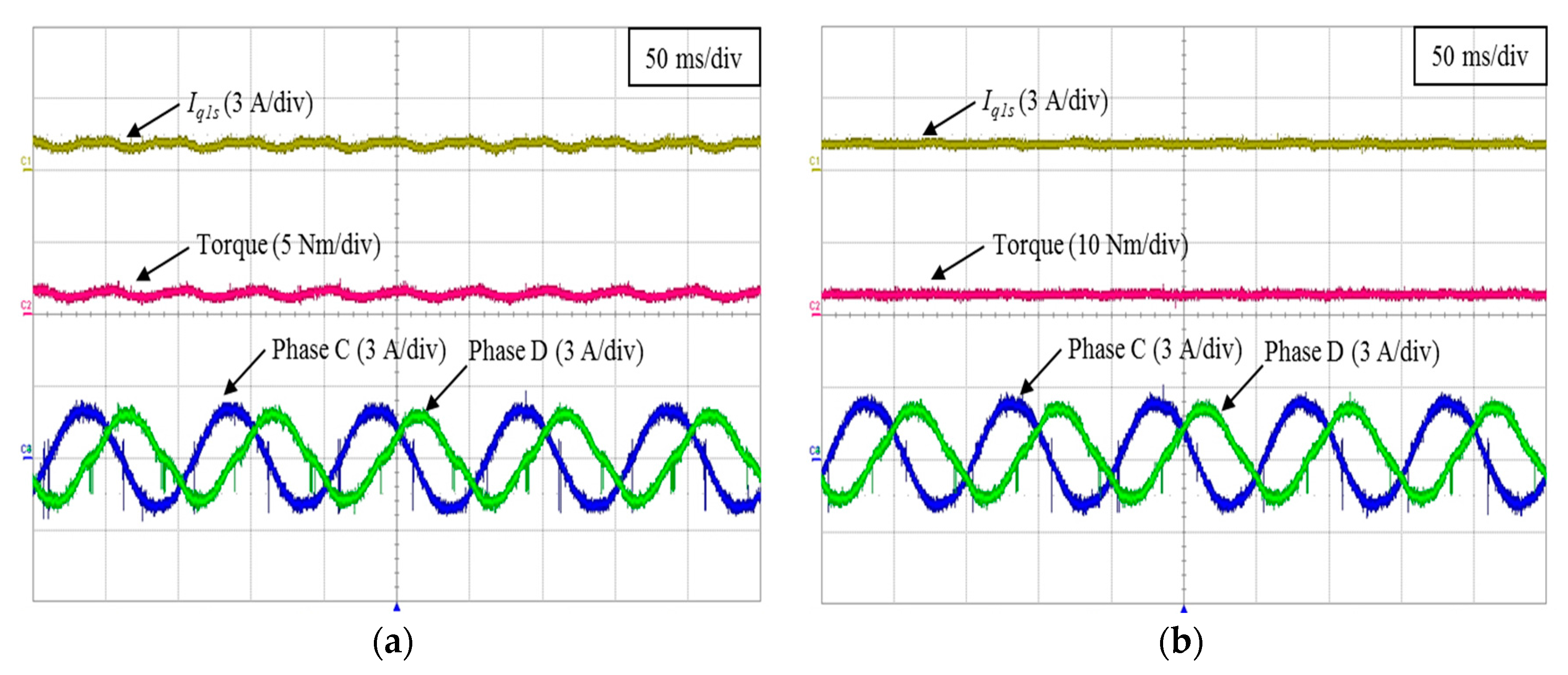
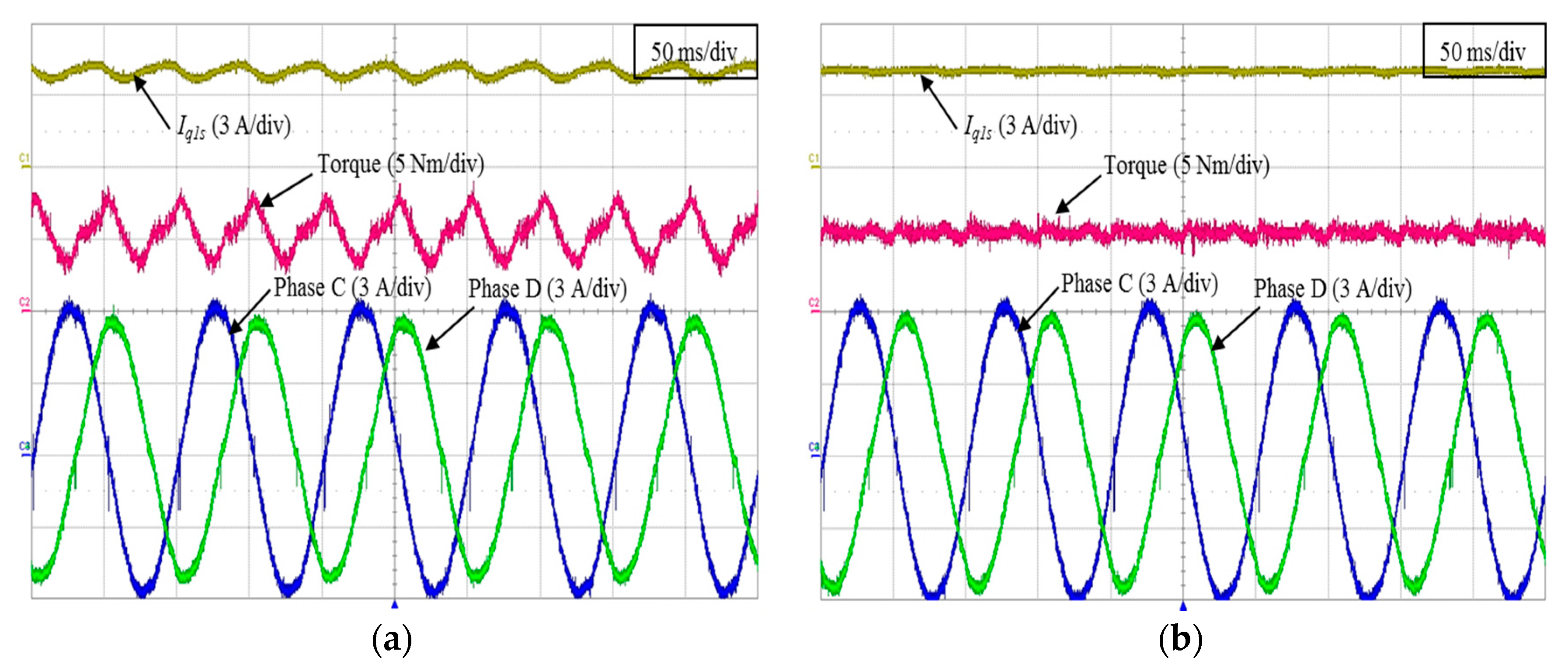
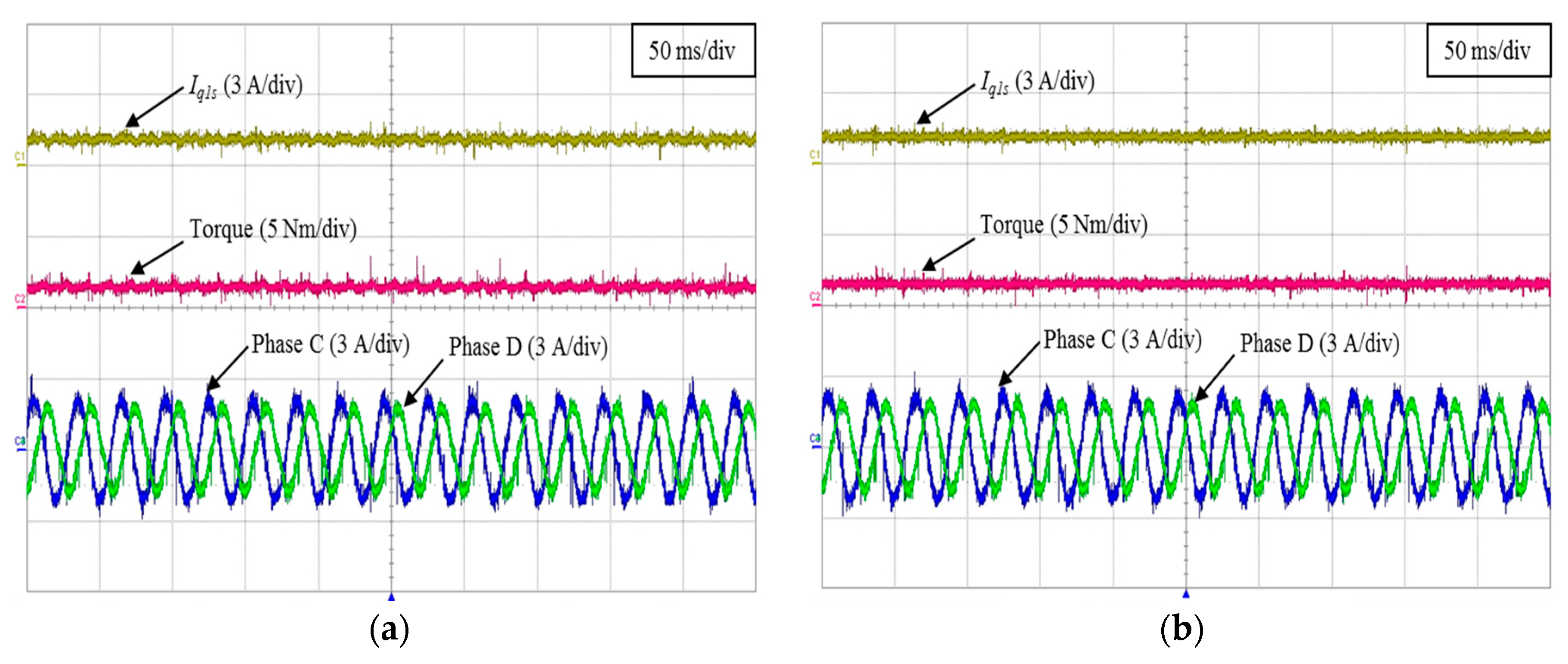
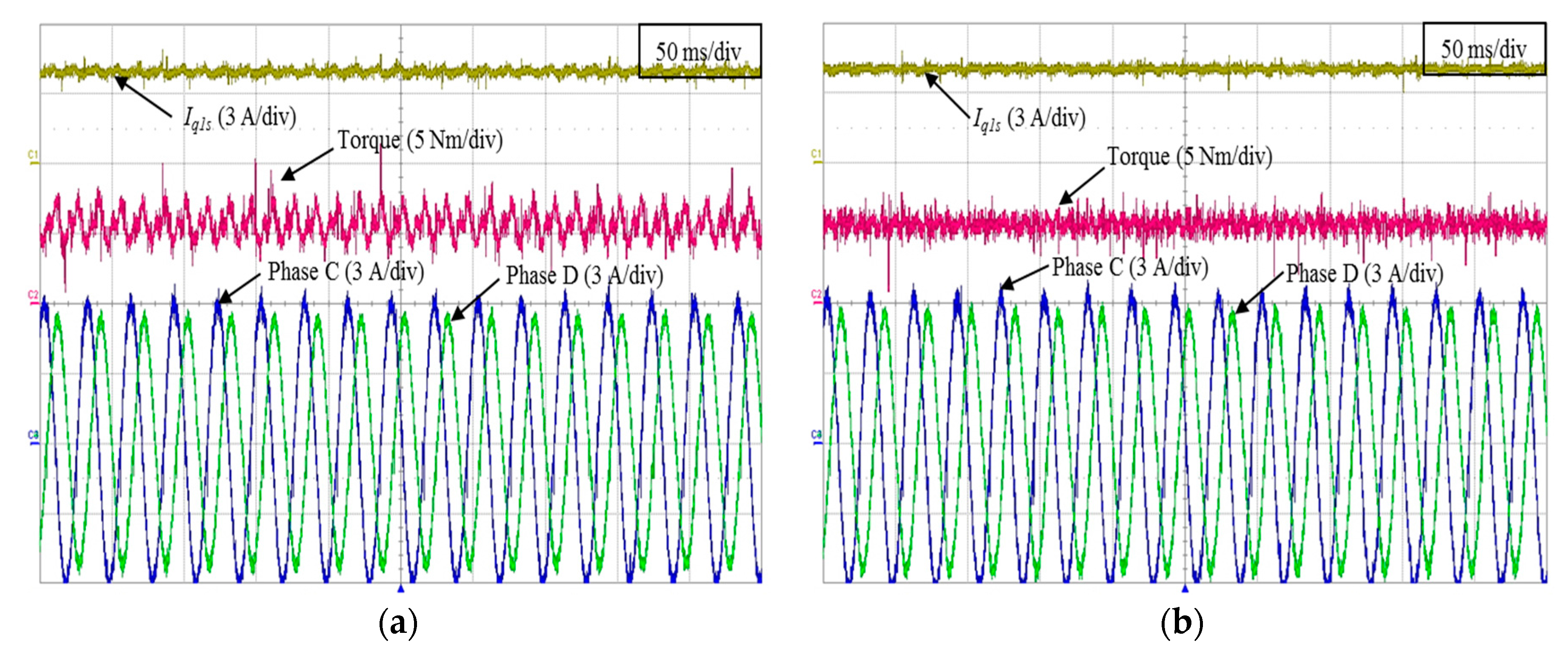
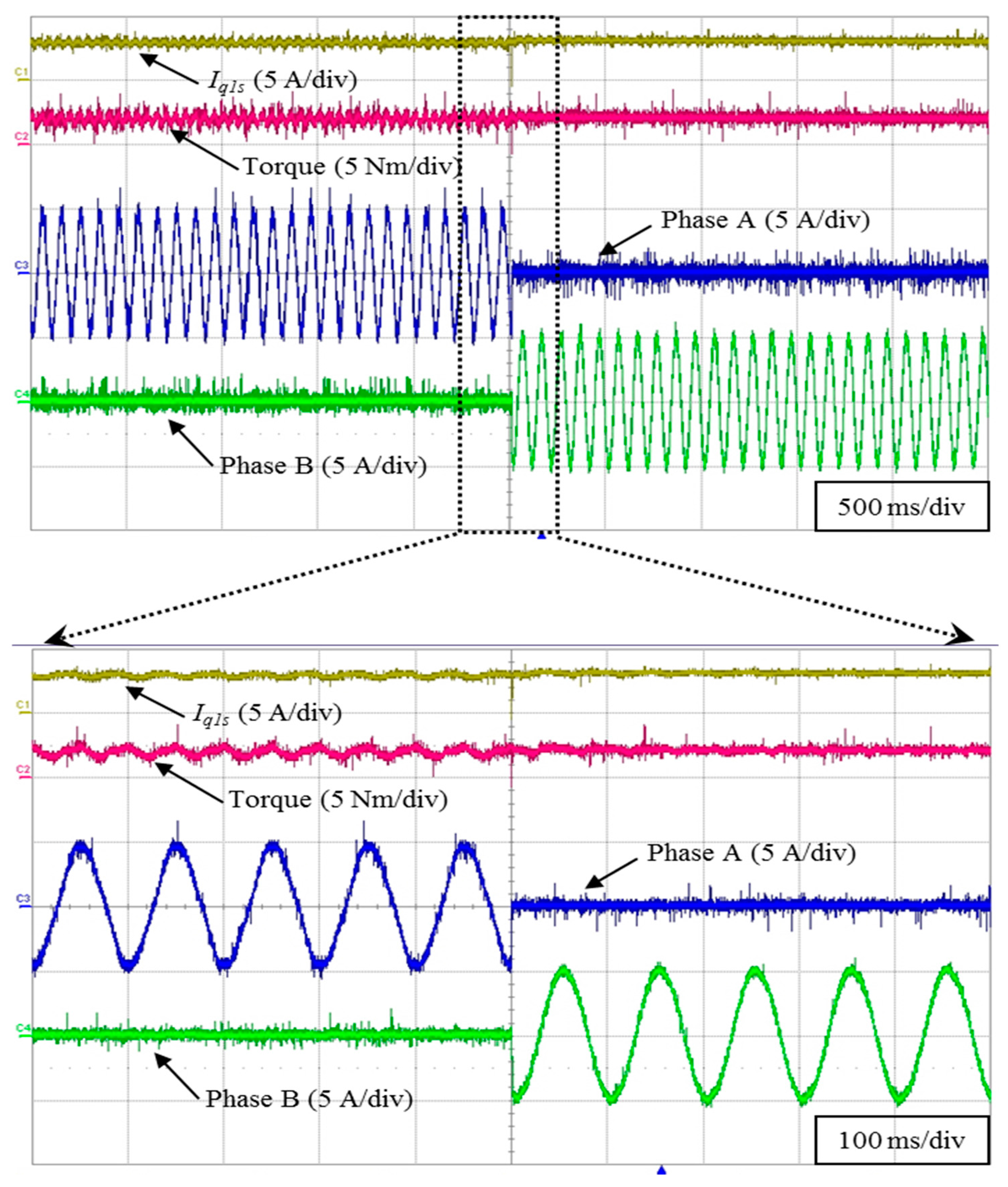
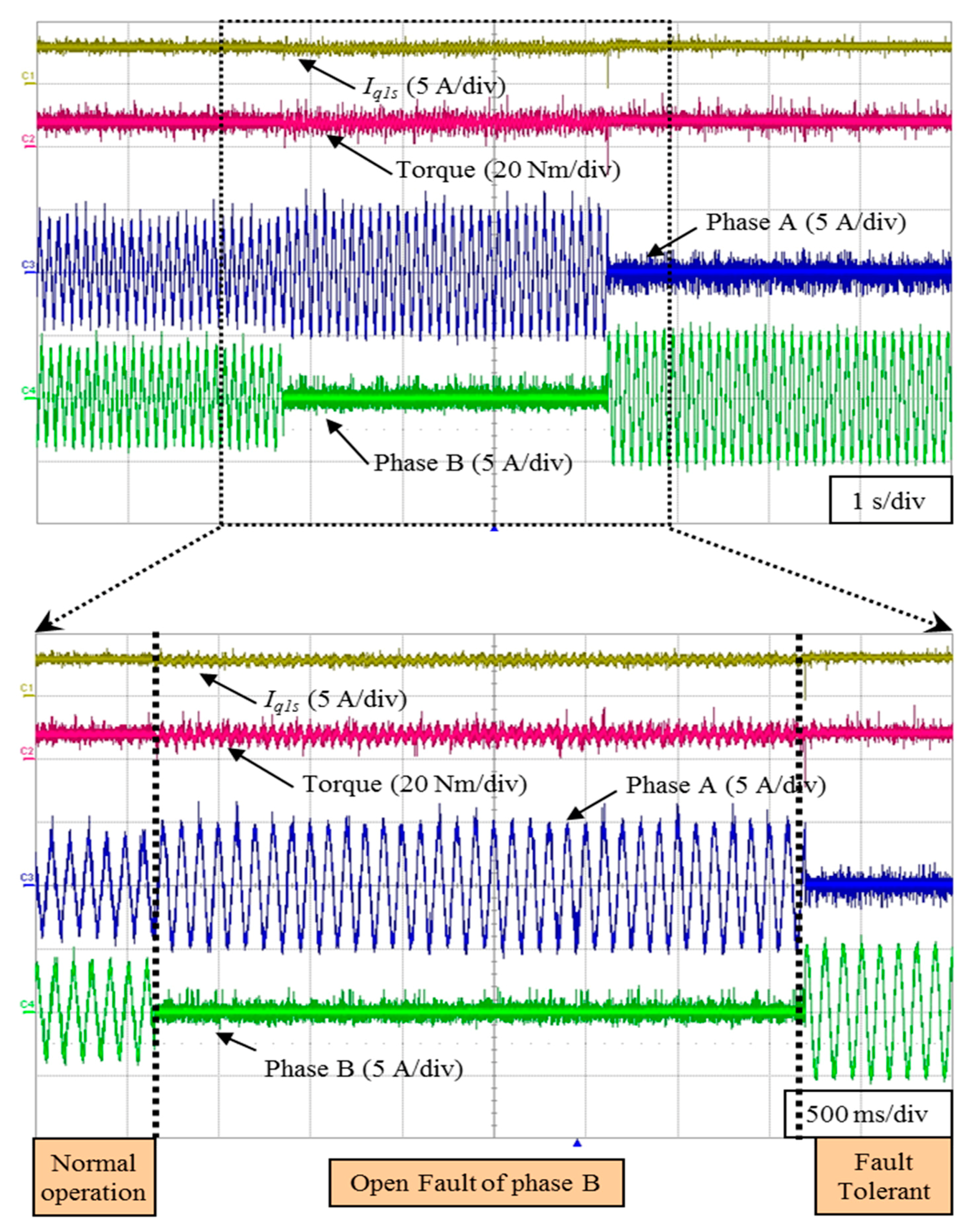
4.2. The Proposed Fault-Tolerant Control Result
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Toliyat, H.A.; Lipo, T.A.; White, J.C. Analysis of a Concentrated Winding Induction Machine for Adjustable Speed Drive Applications Part II: Motor Design and Performance. IEEE Trans. Energy Convers. 1991, 6, 684–692. [Google Scholar] [CrossRef]
- Parsa, L.; Toliyat, H.A.; Goodarzi, A. Five-Phase Interior Permanent-Magnet Motors with Low Torque Pulsation. IEEE Trans. Ind. Appl. 2007, 43, 40–46. [Google Scholar] [CrossRef]
- Levi, E. Multiphase Electric Machines for Variable-Speed Applications. IEEE Trans. Ind. Electron. 2008, 55, 1893–1909. [Google Scholar] [CrossRef]
- Levi, R.; Bojoi, F.; Profumo, F.; Toliyat, H.; Williamson, S. Multiphase Induction Motor Drives—A Technology Status Review. IET Electr. Power Appl. 2007, 1, 489–516. [Google Scholar] [CrossRef]
- Wang, J.; Atallah, K.; Howe, D. Optimal torque control of fault-tolerant permanent magnet brushless machines. IEEE Trans. Magn. 2003, 39, 2962–2964. [Google Scholar] [CrossRef]
- Atallah, K.; Wang, J.; Howe, D. Torque-ripple minimization in modular PMBL machines. IEEE Trans. Ind. Appl. 2003, 39, 1689–1695. [Google Scholar] [CrossRef]
- Tani, A.; Mengoni, M.; Zarri, L.; Serra, G.; Casadei, D. Control of Multi–Phase Induction Motors with an Odd Number of Phases under Open–Circuit Phase Faults. IEEE Trans. Power Electron. 2012, 27, 565–577. [Google Scholar] [CrossRef]
- Bianchi, N.; Pre, M.D.; Bolognani, S. Design of a Fault-Tolerant IPM Motor for Electric Power Steering. IEEE Trans. Veh. Technol. 2006, 55, 1102–1111. [Google Scholar] [CrossRef]
- Dabour, S.M.; Masoud, M.I. Open-Circuit Fault Detection of Five-Phase Voltage Source Inverters. In Proceedings of the 8th IEEE GCC Conference and Exhibition, Muscat, Oman, 1–4 February 2015; pp. 1–6.
- Ribeiro, R.L.A.; Jacobina, C.B.; Dasilva, E.R.C.; Lima, A.M.N. Fault Detection of Open-Switch Damage in Voltage-Fed PWM Motor Drive Systems. IEEE Trans. Power Electron. 2003, 18, 587–593. [Google Scholar] [CrossRef]
- Kastha, D.; Bose, B.K. Investigation of Fault Modes of Voltage-Fed-Inverter System for Induction Motor Drive. IEEE Trans. Ind. Appl. 1994, 30, 1028–1037. [Google Scholar] [CrossRef]
- Mahmoud, G.; Masoud, M.; El-Arabawy, I. Inverter Faults in Variable Voltage Variable Frequency Induction Motor Drive. In Proceedings of the Compatibility in Power Electronics (CPE), Gdansk, Poland, 29 May–1 June 2007; pp. 1–6.
- Lee, J.-S.; Lee, K.-B. Open-Circuit Fault Tolerant Control for Outer Switches of Three-Level Rectifiers in Wind Turbine Systems. IEEE Trans. Power Electron. 2016, 31, 3806–3815. [Google Scholar] [CrossRef]
- Nandi, S.; Toliyat, H.A. Condition Monitoring and Fault Diagnosis of Electrical Machines—A Review. In Proceedings of the Industry Applications conference (IAS), Phoenix, AZ, USA, 3–7 October 1999; pp. 197–204.
- Mendes, A.M.S.; Cardoso, A.J.M. Voltage Source Inverter Fault Diagnosis in Variable Speed Ac Drives, by the Average Current Park’s Vector Approach. In Proceedings of the IEEE International Electric Machines and Drives Conference (IEMDC), Seattle, WA, USA, 9–12 May 1999; pp. 704–706.
- Choi, U.-M.; Jeong, H.-G.; Lee, K.-B.; Blaabjerg, F. Method for Detecting an Open-Switch Fault in a Grid-Connected NPC Inverter System. IEEE Trans. Power Electron. 2012, 27, 2726–2739. [Google Scholar] [CrossRef]
- Lee, J.-S.; Lee, K.-B. Tolerance Control for Inner Open-Switch Faults of a T-type Three-Level Rectifier. J. Power Electron. 2014, 14, 1157–1165. [Google Scholar] [CrossRef]
- Lee, E.S.; Lee, K.-B. Fault-Tolerant Strategy to Control a Reverse Matrix Converter for an Open-Switch Fault in Rectifier Stage. J. Power Electron. 2016, 61, 57–65. [Google Scholar] [CrossRef]
- Im, W.-S.; Kim, J.-M.; Lee, D.-C.; Lee, K.-B. Diagnosis and Fault Tolerant Control of 3-phase AC-DC PWM Converter Systems. IEEE Trans. Ind. App. 2013, 49, 1539–1547. [Google Scholar] [CrossRef]
- Meinguet, F.; Semail, E.; Gyselinck, J. An on-line method for stator fault detection in multi-phase PMSM drives. In Proceedings of the 2010 IEEE Vehicle Power Propulsion Conference, Lille, France, 1–3 September 2010; pp. 1–6.
- Dwari, S.; Parsa, L. Fault–Tolerant Control of Five-Phase Permanent-Magnet Motors with Trapezoidal Back EMF. IEEE Trans. Ind. Electron. 2011, 58, 476–485. [Google Scholar] [CrossRef]
- Kianinezhad, R.; Mobarakeh, B.N.; Baghli, L.; Betin, F.; Capolino, G.A. Modeling and Control of Six–Phase Symmetrical Induction Machine under Fault Condition Due to Open Phase. IEEE Trans. Ind. Electron. 2008, 55, 1966–1977. [Google Scholar] [CrossRef]
- Locment, F.; Semail, E.; Kestelyn, X. Vectorial approach-based control of a seven-phase axial flux machine designed for fault operation. IEEE Trans. Ind. Electron. 2008, 55, 3682–3691. [Google Scholar] [CrossRef] [Green Version]
- Ryu, H.M.; Kim, J.W.; Sul, S.K. Synchronous-Frame Current Control of Multiphase Synchronous Motor under Asymmetric Fault Condition due to Open Phases. IEEE Trans. Ind. App. 2006, 42, 1062–1070. [Google Scholar]
- Jacobina, C.B.; Freitas, I.S.; Oliveira, T.M.; da Silva, E.R.C.; Lima, A.M.N. Fault tolerant control of five-phase AC motor drive. In Proceedings of the Power Electronics Specialists Conference (PESC), Aachen, Germany, 20–25 June 2004; pp. 3486–3492.
- Fu, J.R.; Lipo, T.A. Disturbance-Free Operation of a Multiphase Current-Regulated Motor Drive with an Opened Phase. IEEE Trans. Ind. Appl. 1994, 30, 1267–1274. [Google Scholar]
- Ryu, H.M.; Kim, J.W.; Sul, S.K. Analysis of Multiphase Space Vector Pulse-Width Modulation Based on Multiple d-q Spaces Concept. IEEE Trans. Power Electron. 2005, 20, 1364–1371. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Phase | Open Fault Angle (Fault_θ) | Flag | |
|---|---|---|---|
| A | Top | 145°–180° | 1 |
| Bottom | 325°–360° | 2 | |
| B | Top | 73°–108° | 3 |
| Bottom | 253°–288° | 4 | |
| C | Top | 0°–36° | 5 |
| bottom | 181°–216° | 6 | |
| D | Top | 289°–324° | 7 |
| Bottom | 109°–144° | 8 | |
| E | Top | 217°–252° | 9 |
| bottom | 37°–72° | 10 | |
| Induction Machine Specification | |
|---|---|
| Output Power | 1.5 kW |
| Rated Voltage | 220 V |
| Rated Frequency | 60 Hz |
| Rated Current | 4.9 A |
| Rated Speed | 1684 rpm |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baek, S.-K.; Shin, H.-U.; Kang, S.-Y.; Park, C.-S.; Lee, K.-B. Open Fault Detection and Tolerant Control for a Five Phase Inverter Driving System. Energies 2016, 9, 355. https://doi.org/10.3390/en9050355
Baek S-K, Shin H-U, Kang S-Y, Park C-S, Lee K-B. Open Fault Detection and Tolerant Control for a Five Phase Inverter Driving System. Energies. 2016; 9(5):355. https://doi.org/10.3390/en9050355
Chicago/Turabian StyleBaek, Seung-Koo, Hye-Ung Shin, Seong-Yun Kang, Choon-Soo Park, and Kyo-Beum Lee. 2016. "Open Fault Detection and Tolerant Control for a Five Phase Inverter Driving System" Energies 9, no. 5: 355. https://doi.org/10.3390/en9050355
APA StyleBaek, S.-K., Shin, H.-U., Kang, S.-Y., Park, C.-S., & Lee, K.-B. (2016). Open Fault Detection and Tolerant Control for a Five Phase Inverter Driving System. Energies, 9(5), 355. https://doi.org/10.3390/en9050355