Factor Analysis of the Aggregated Electric Vehicle Load Based on Data Mining

Abstract
:1. Introduction
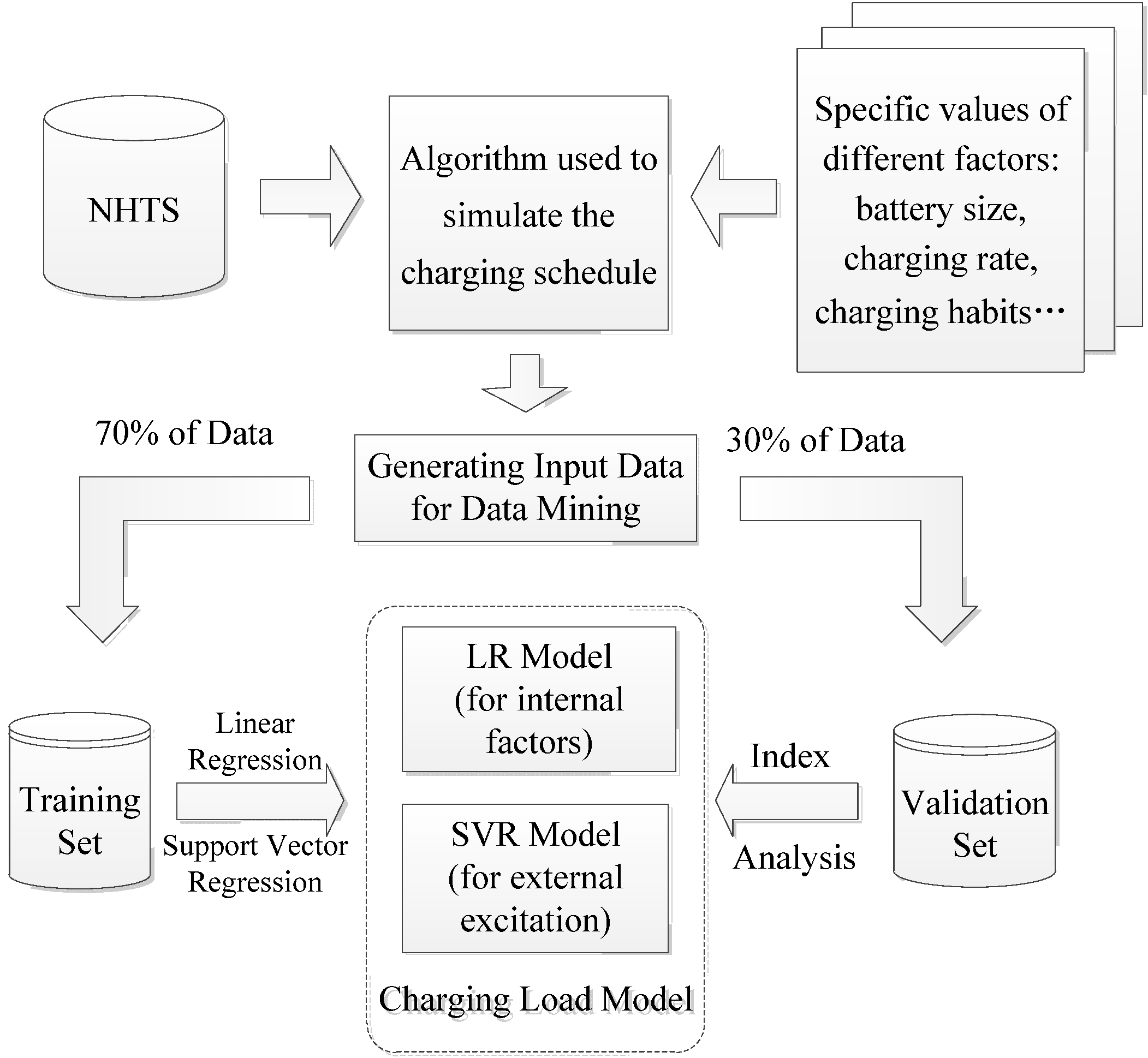
2. Framework of Data-Mining Based Modeling
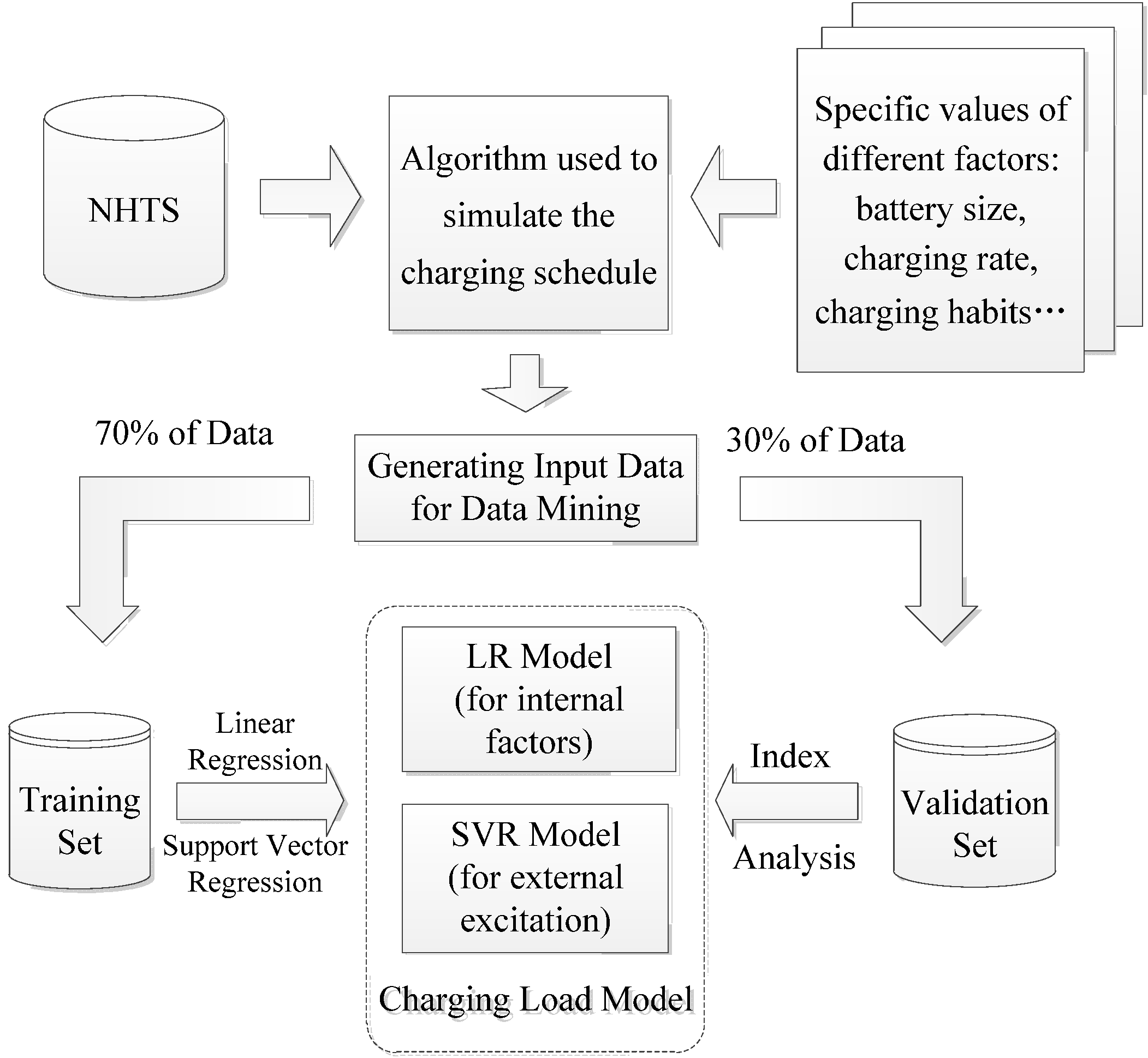
3. Generating Input Data by Simulation
3.1. Methodology
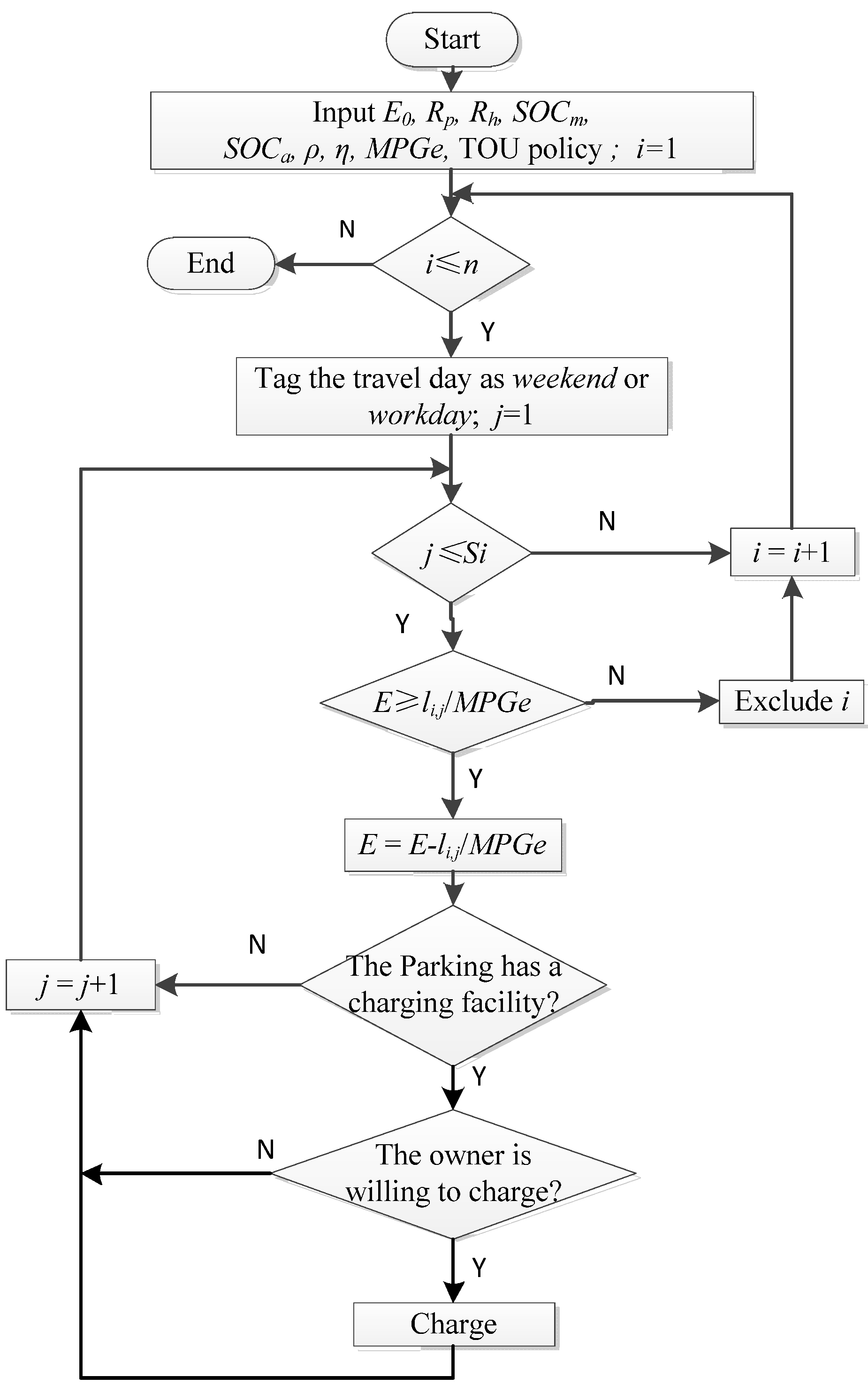
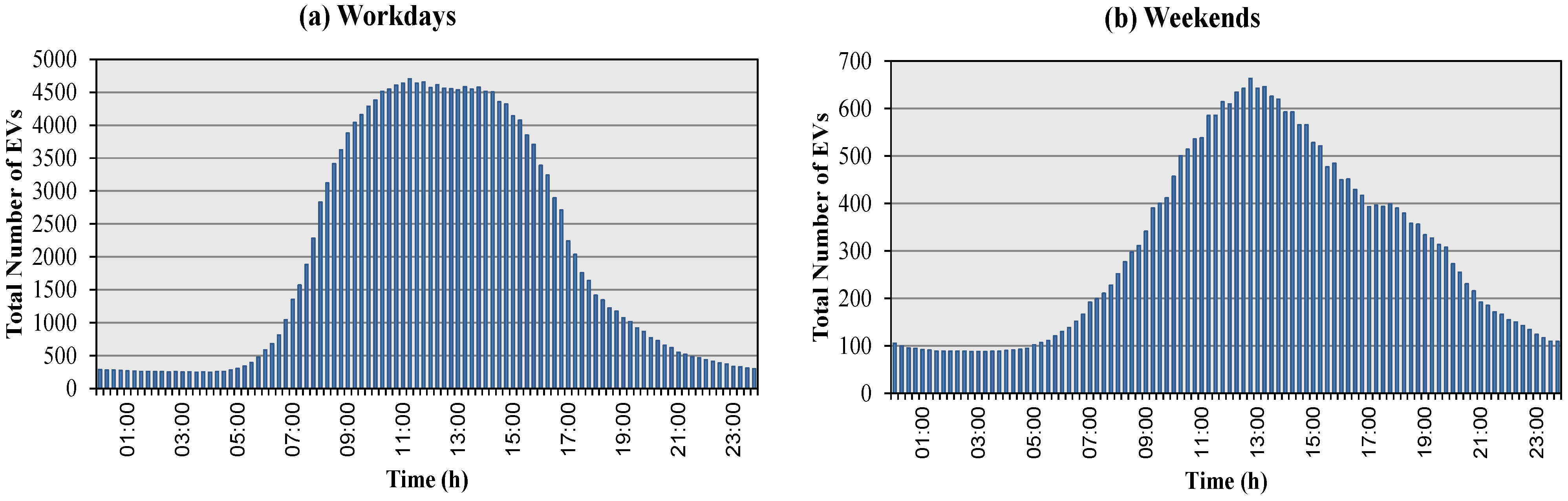
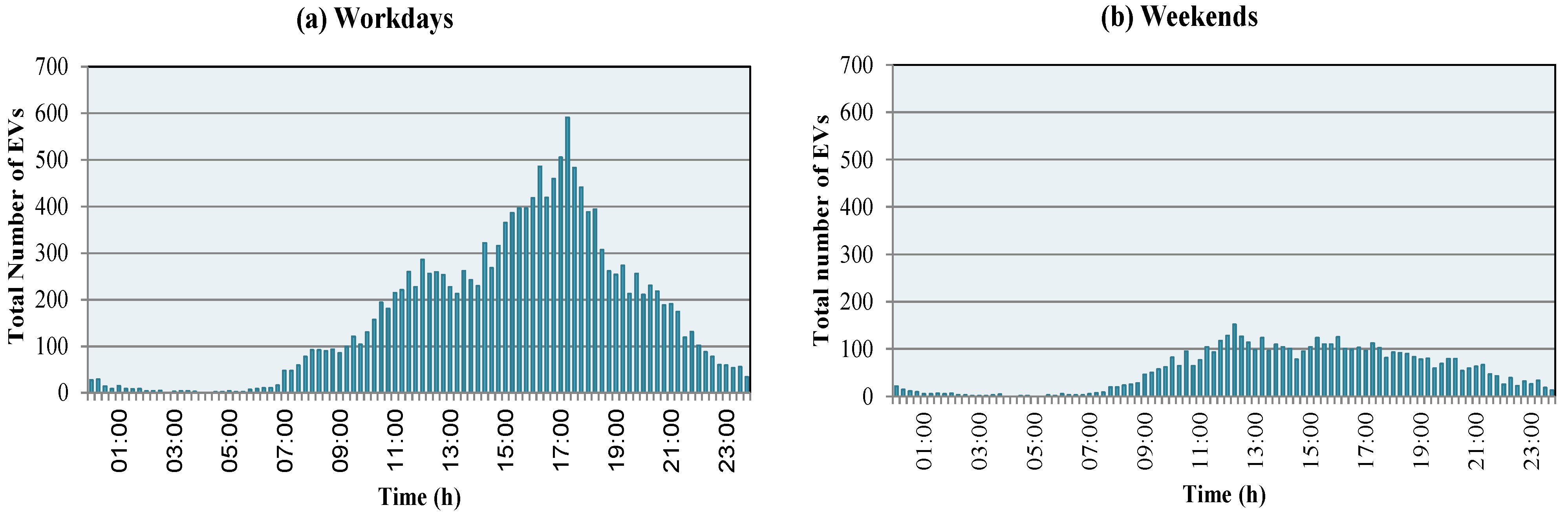
3.2. Simulation of the Charging Schedules

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable Name | Variable Description |
|---|---|
| E0 | EV battery size |
| Rp | Charging rate in public places |
| Rh | Charging rate at home |
| SOCm | SOC threshold related to battery maintenance |
| SOCa | SOC threshold related to range anxiety |
| Ρ | Penetration of public charging infrastructure |
| MPGe | Miles per gallon of gasoline equivalent |
| tup | Instant when the price of electricity increases |
| tdown | Instant when the price of electricity decreases |
| η | Efficiency of the charger |
| SOC0 | SOC for the first trip |
| n | Total number of vehicles in the simulation |
| i | EV no. |
| j | Trip no. |
| E | Current energy stored in the battery |
| Si | Total number of the trips by EVi |
| li,j | Mileage of trip j for EVi |

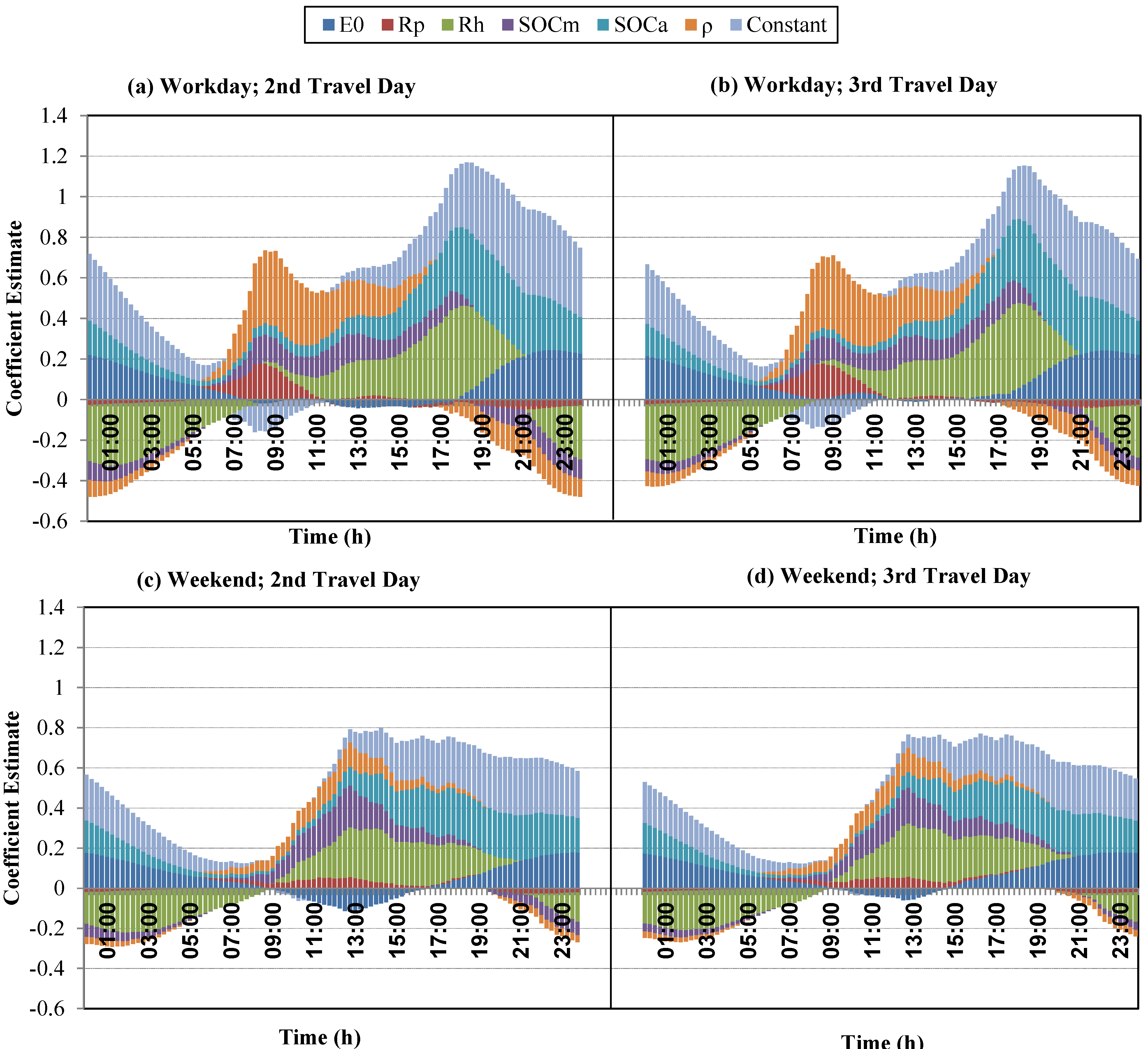
4. Internal Factors Analysis
4.1. Purpose and Method
4.2. Implementation
| Variable | Lower bound | Upper bound |
|---|---|---|
| E0 (kWh) * | 16 | 35 |
| Rp (kW) ** | 1.4 | 7.7 |
| Rh (kW) | 1.4 | 7.7 |
| SOCm (%) | 50 | 100 |
| SOCa (%) | 0 | 50 |
| ρ (%) | 0 | 100 |
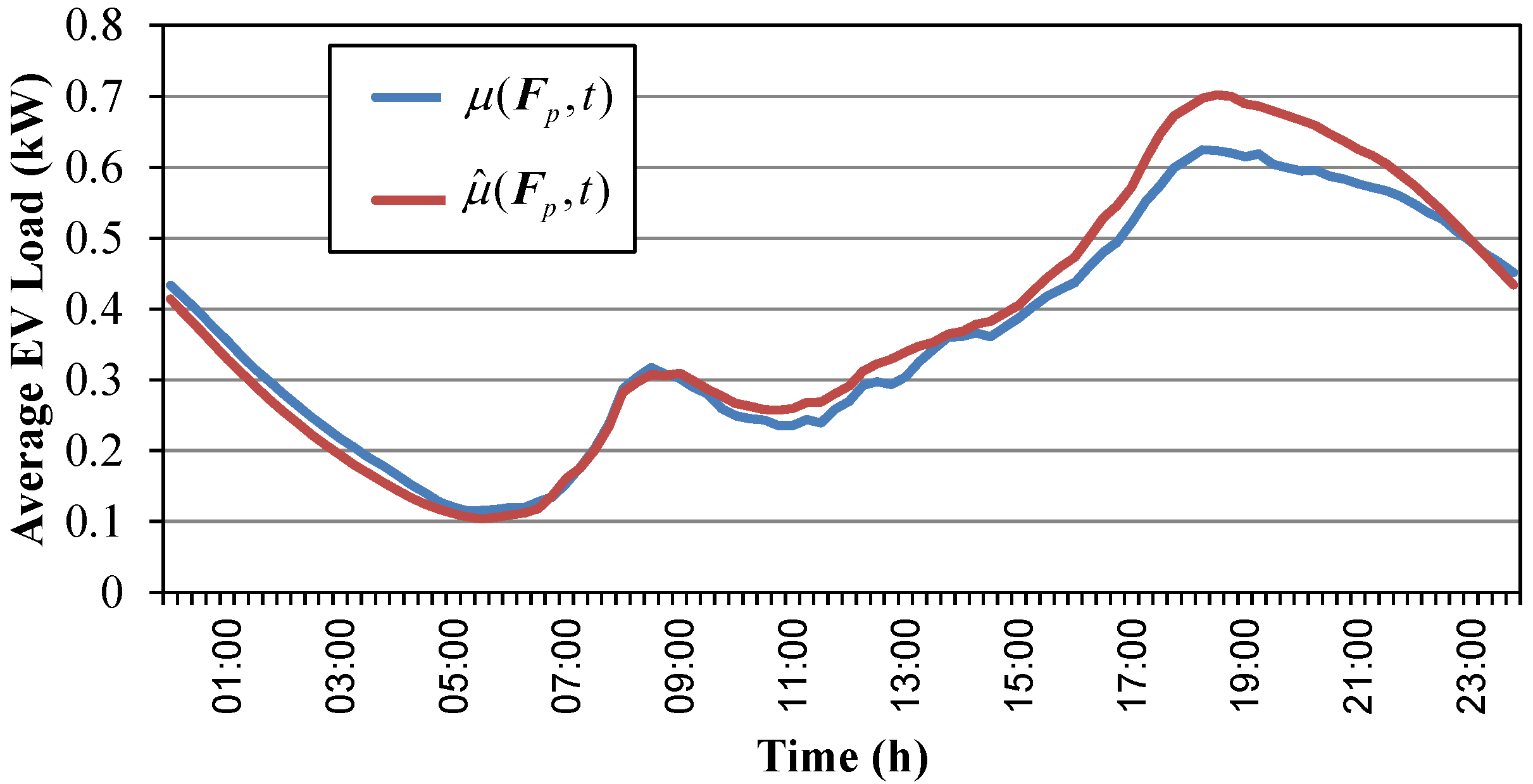
4.3. Model Validation
4.4. Observations and Discussion
4.4.1. Battery Size
4.4.2. Charging Rate in Public Places
4.4.3. Charging Rate at Home
4.4.4. Battery Maintenance
4.4.5. Range Anxiety
4.4.6. Penetration of the Public Charging Infrastructure
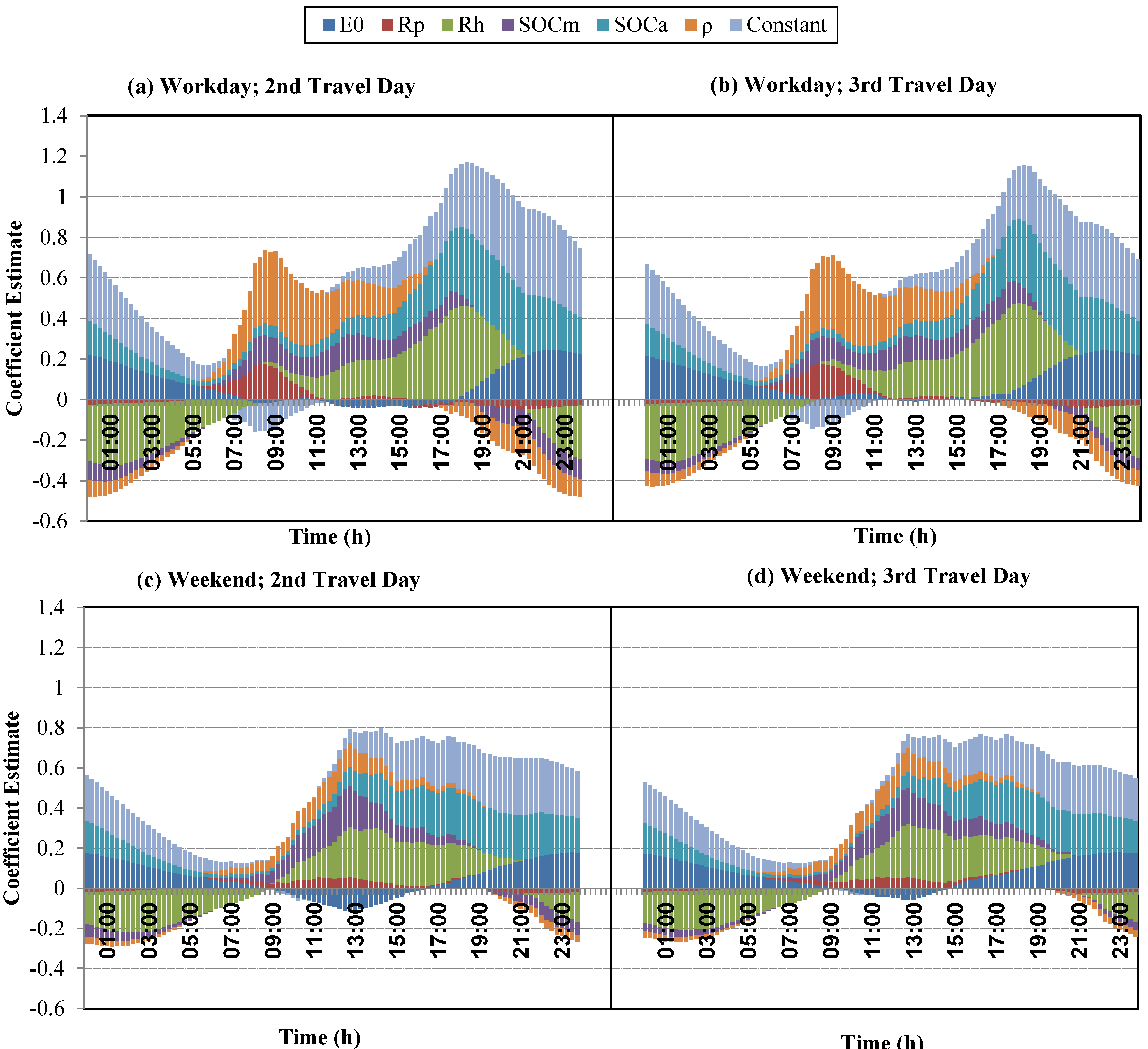
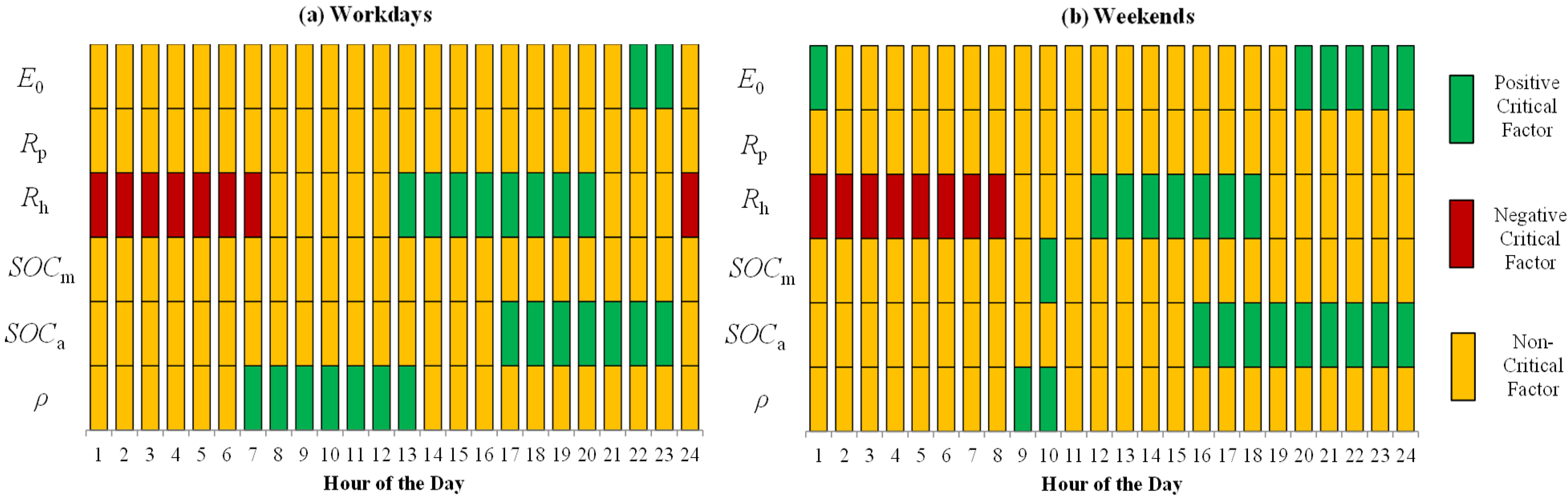
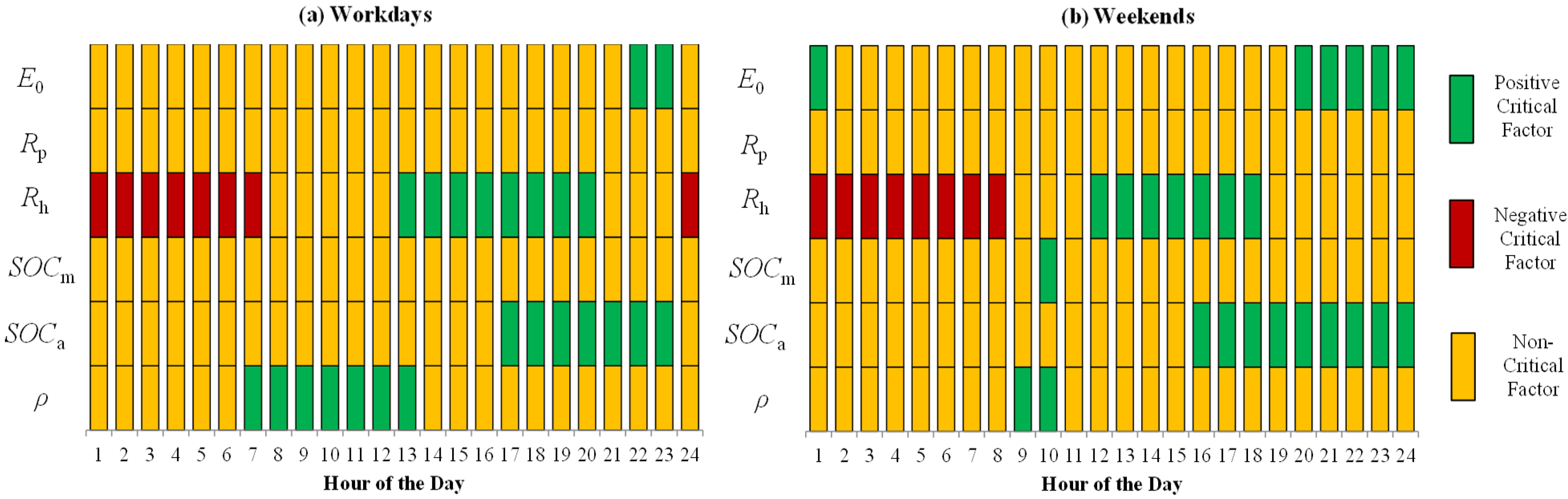
4.4.7. Critical Factors
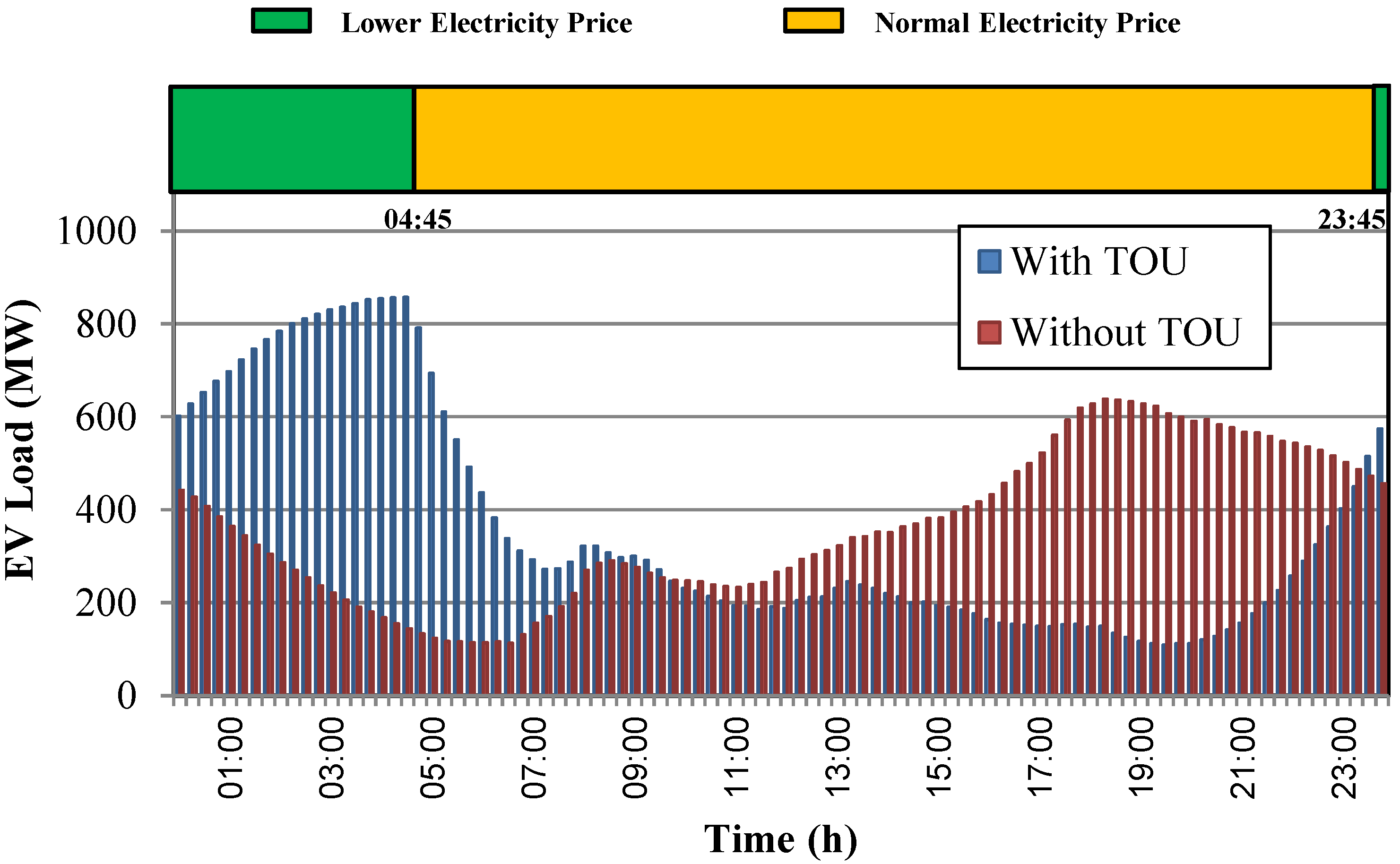
5. Analysis of External Excitation
5.1. Purpose and Method
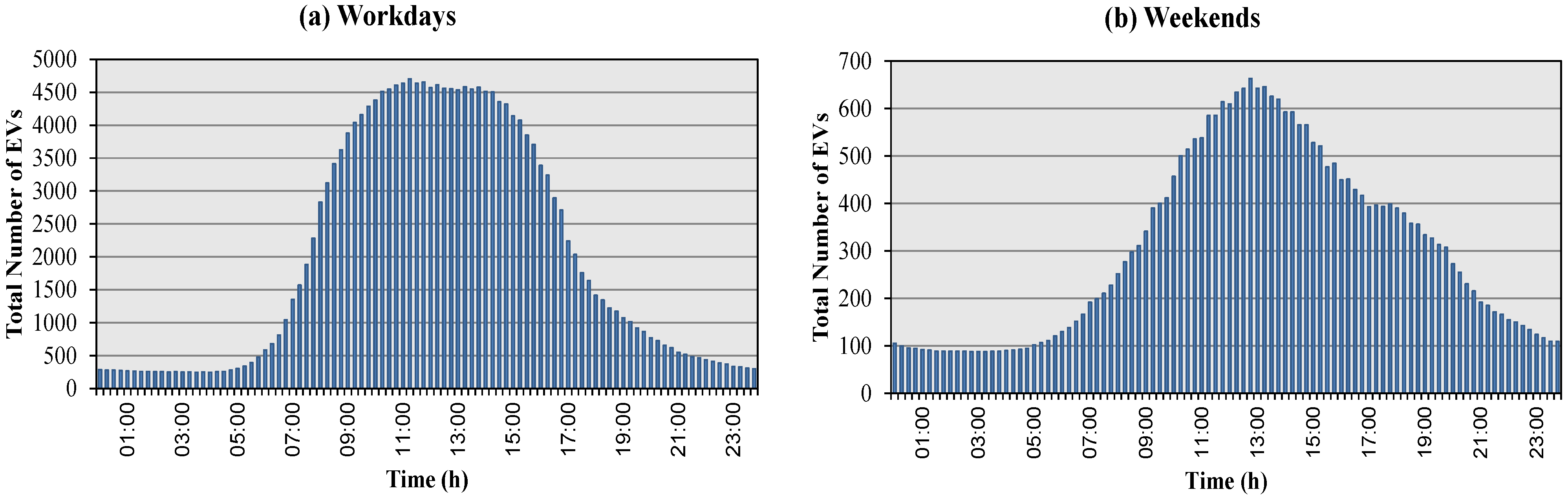
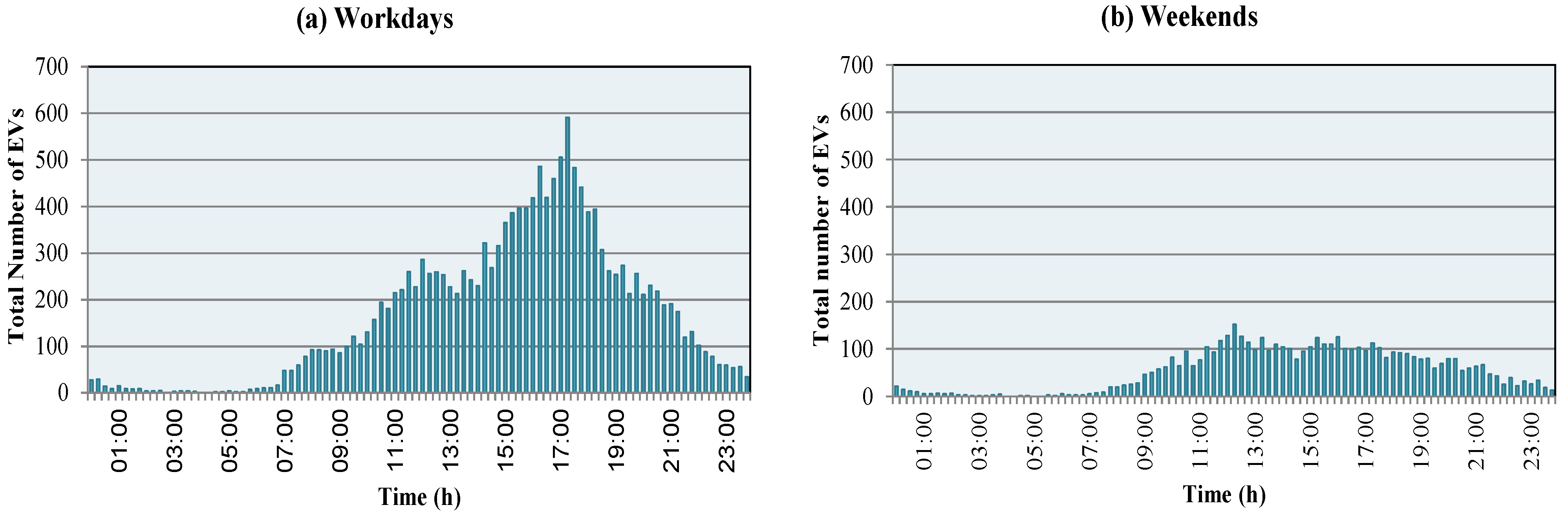
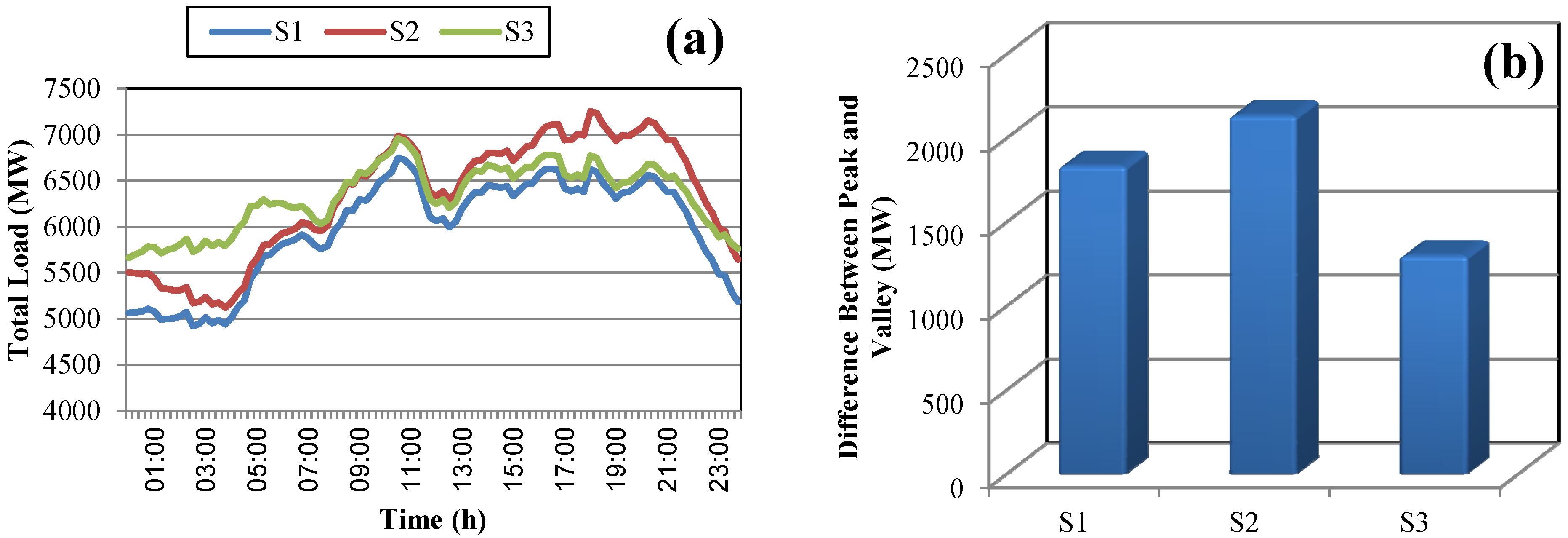
5.2. Case Studies
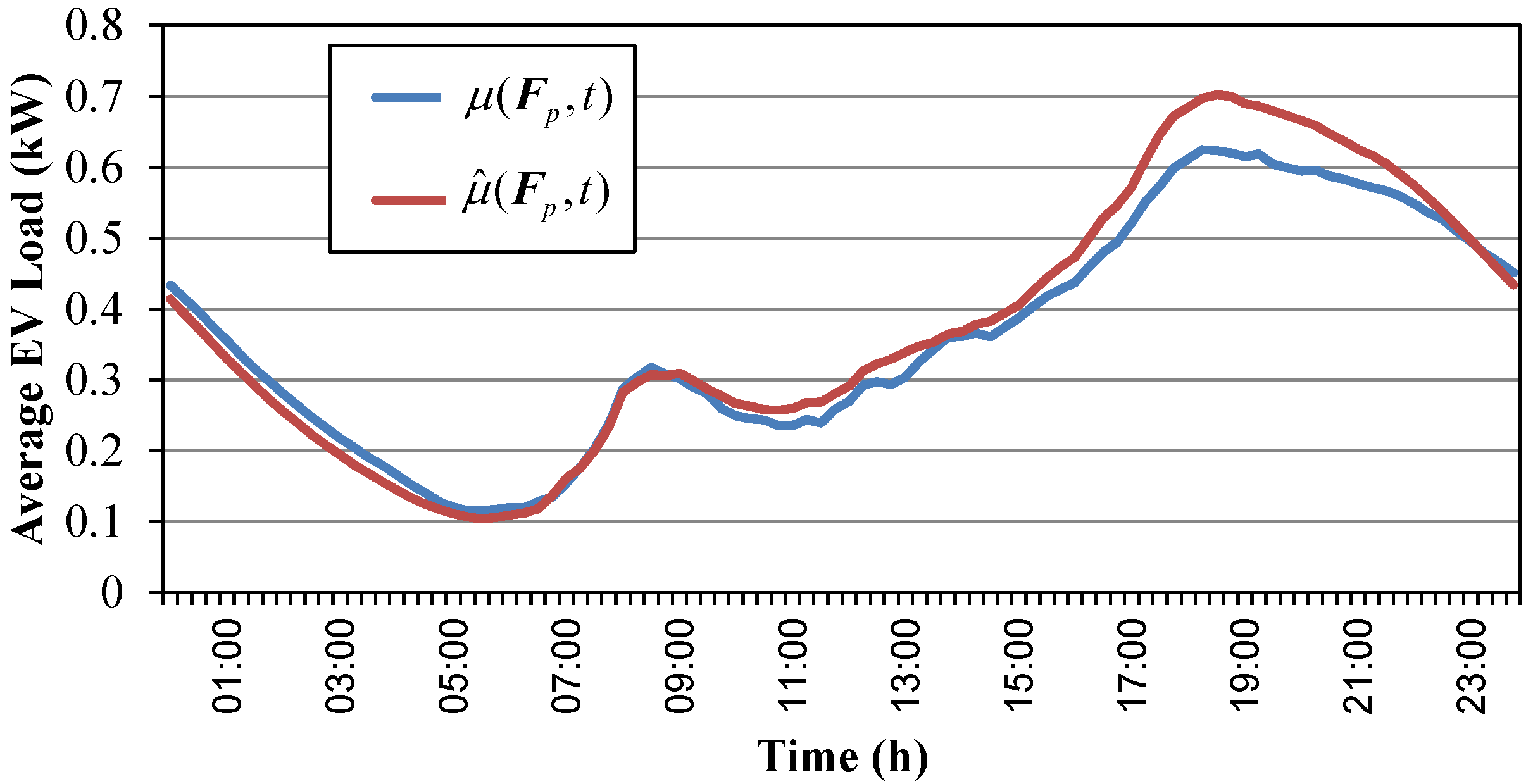
5.3. Implementation of SVR Modeling and Model Validation
5.4. Results


6. Conclusions
Acknowledgments
References
- Cowan, L.K. 5.2 million strong: Report predicts 46× increase in EV sales by 2017. Inhabitat. 24 August 2011. Available online: http://inhabitat.com/5-2-million-strong-report-predicts-46x-increase-in-ev-sales-by-2017/rsz-pike-research-ev-sales-predictions-chart (accessed on 14 March 2012).
- Darabi, Z.; Ferdowsi, M. Aggregated impact of plug-in hybrid electric vehicles on electricity demand profile. IEEE Trans. Sustain. Energy 2011, 2, 501–508. [Google Scholar] [CrossRef]
- Wu, D.; Aliprantis, D.C.; Gkritza, K. Electric energy and power consumption by light-duty plug-in electric vehicles. IEEE Trans. Power Syst. 2011, 26, 738–746. [Google Scholar] [CrossRef]
- Claire, W. Plug-in hybrid electric vehicle impacts on hourly electricity demand in the United States. Energy Policy 2011, 39, 3766–3778. [Google Scholar] [CrossRef]
- Rahman, S.; Shrestha, G.B. An investigation into the impact of electric vehicle load on the electric utility distribution system. IEEE Trans. Power Deliv. 1993, 8, 591–597. [Google Scholar] [CrossRef]
- Pieltain, F.L.; Gómez, S.R.T.; Cossent, R.; Domingo, C.M.; Frias, P. Assessment of the impact of plug-in electric vehicles on distribution networks. IEEE Trans. Power Syst. 2011, 26, 206–213. [Google Scholar] [CrossRef]
- Tikka, V.; Lassila, J.; Haakana, J.; Partanen, J. Case study of the effects of electric vehicle charging on grid loads in an urban area. In Proceedings of Innovative Smart Grid Technologies (ISGT Europe), 2011 2nd IEEE PES International Conference and Exhibition, Manchester, UK, 5–7 December 2011; pp. 1–7.
- Sioshansi, R.; Fagiani, R.; Marano, V. Cost and emissions impacts of plug-in hybrid vehicles on the Ohio power system. Energy Policy 2010, 38, 6703–6712. [Google Scholar] [CrossRef]
- Van Vliet, O.; Brouwer, A.S.; Kuramochi, T.; van den Broek, M.; Faaij, A. Energy use, cost and CO2 emissions of electric cars. J. Power Sources 2011, 196, 2298–2310. [Google Scholar]
- Zhuowei, L.; Yonghua, S.; Zechun, H.; Zhiwei, X.; Xia, Y.; Kaiqiao, Z. Forecasting charging load of plug-in electric vehicles in China. In Proceedings of Power and Energy Society General Meeting, Detroit, MI, USA, 24–29 July 2011; pp. 1–8.
- Kejun, Q.; Chengke, Z.; Allan, M.; Yue, Y. Load model for prediction of electric vehicle charging demand. In Proceedings of Power System Technology (POWERCON), 2010 International Conference, Hangzhou, China, 24–28 October. 2010; pp. 1–6.
- Kejun, Q.; Chengke, Z.; Allan, M.; Yue, Y. Modeling of load demand due to EV battery Charging in distribution systems. IEEE Trans. Power Syst. 2011, 26, 802–810. [Google Scholar] [CrossRef]
- Ashtari, A.; Bibeau, E.; Shahidinejad, S.; Molinski, T. PEV charging profile prediction and analysis based on vehicle usage data. IEEE Trans. Smart Grid 2012, 3, 341–350. [Google Scholar] [CrossRef]
- Shao, S.; Zhang, T.; Pipattanasomporn, M.; Rahman, S. Impact of TOU rates on distribution load shapes in a smart grid with PHEV penetration. In Proceedings of Transmission and Distribution Conference and Exposition, Orlando, FL, USA, 7–10 May 2010; pp. 1–6.
- U.S. Department of Transportation, Federal Highway Administration. 2009 National Household Travel Survey Home Page. Available online: http://nhts.ornl.gov (accessed on 19 June 2012).
- Nissan Leaf Features and Specifications Home page. Available online: http://www.nissanusa.com/leaf-electric-car/index#/leaf-electric-car/specs-features/index (accessed on 26 April 2012).
- Chevrolet. 2011 Volt Electric Car Home Page. Available online: http://www.chevrolet.com/electriccar (accessed on 14 March 2012).
- MINI E Specifications. Available online: http://www.miniusa.com/minie-usa/pdf/MINI-E-spec-sheet.pdf (accessed on 14 March 2012).
- Graham, R. Comparing the Benefits and Impacts of Hybrid Electric Vehicle Options; 1000349; Technical Report for Electric Power Research Institute: Palo Alto, CA, USA, July 2002. [Google Scholar]
- Drapper, N.R.; Smith, H. Applied Regression Analysis, 3rd ed.; John Wiley & Sons: Malden, MA, USA, 1998; pp. 307–312. [Google Scholar]
- Chang, C.; Lin, C. LIBSVM: A Library for support vector machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 1–27. [Google Scholar] [CrossRef]
- Vapnik, V.N. The Nature of Statistical Learning Theory; Springer: New York, NY, USA, 1995; pp. 183–190. [Google Scholar]
- Mets, K.; Verschueren, T.; Haerick, W.; Develder, C.; de Turck, F. Optimizing smart energy control strategies for plug-in hybrid electric vehicle charging. In Proceedings of Network Operations and Management Symposium Workshops (NOMS), Osaka, Japan, 19–23 April 2010; pp. 293–299.
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; pp. 39–43.
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of IEEE International Conference on Neural Networks, Perth, Australia, 27 October–1 December 1995; pp. 1942–1948.
- Birge, B. PSOt—A particle swarm optimization toolbox for use with Matlab. In Proceedings of Swarm Intelligence Symposium, Indianapolis, IN, USA, 24–26 April 2003; pp. 182–186.
© 2012 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Guo, Q.; Wang, Y.; Sun, H.; Li, Z.; Xin, S.; Zhang, B. Factor Analysis of the Aggregated Electric Vehicle Load Based on Data Mining. Energies 2012, 5, 2053-2070. https://doi.org/10.3390/en5062053
Guo Q, Wang Y, Sun H, Li Z, Xin S, Zhang B. Factor Analysis of the Aggregated Electric Vehicle Load Based on Data Mining. Energies. 2012; 5(6):2053-2070. https://doi.org/10.3390/en5062053
Chicago/Turabian StyleGuo, Qinglai, Yao Wang, Hongbin Sun, Zhengshuo Li, Shujun Xin, and Boming Zhang. 2012. "Factor Analysis of the Aggregated Electric Vehicle Load Based on Data Mining" Energies 5, no. 6: 2053-2070. https://doi.org/10.3390/en5062053
APA StyleGuo, Q., Wang, Y., Sun, H., Li, Z., Xin, S., & Zhang, B. (2012). Factor Analysis of the Aggregated Electric Vehicle Load Based on Data Mining. Energies, 5(6), 2053-2070. https://doi.org/10.3390/en5062053