Trusted Simulation Using Proteus Model for a PV System: Test Case of an Improved HC MPPT Algorithm

 , ,
, ,  ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
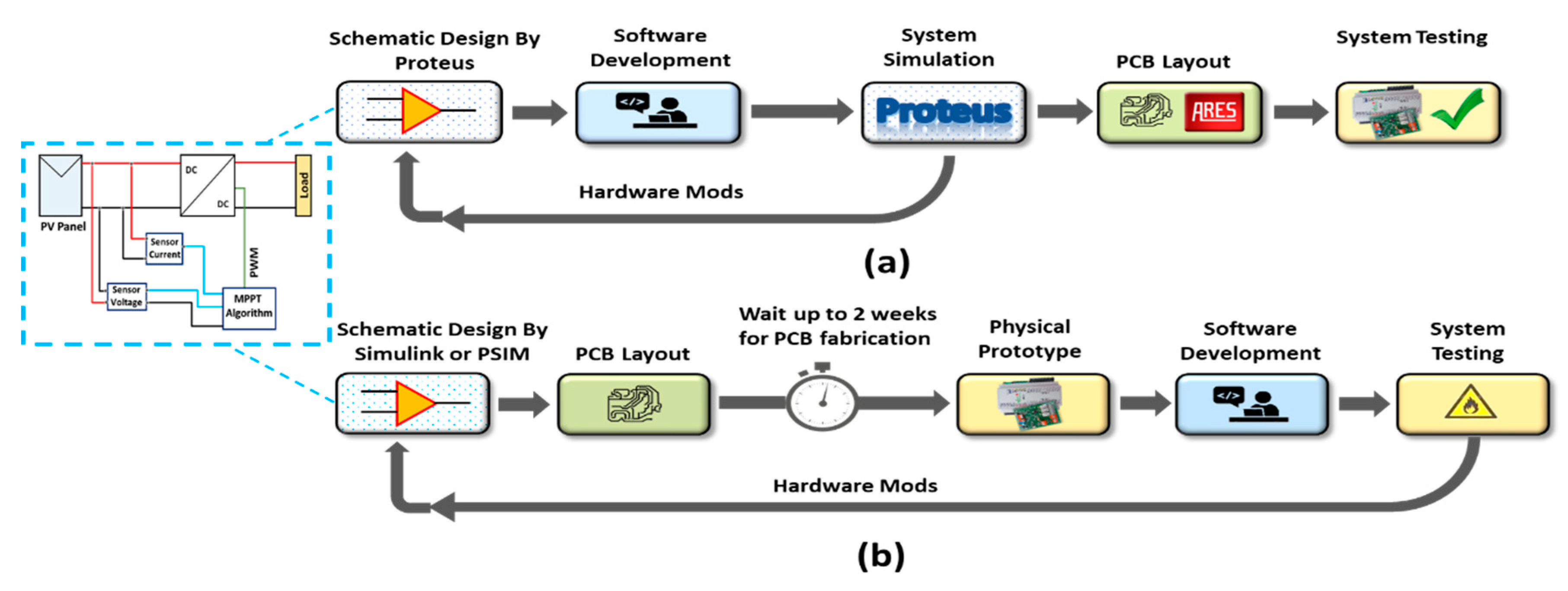
2.1. Description of a PV System
2.1.1. Description of the Entire PV System
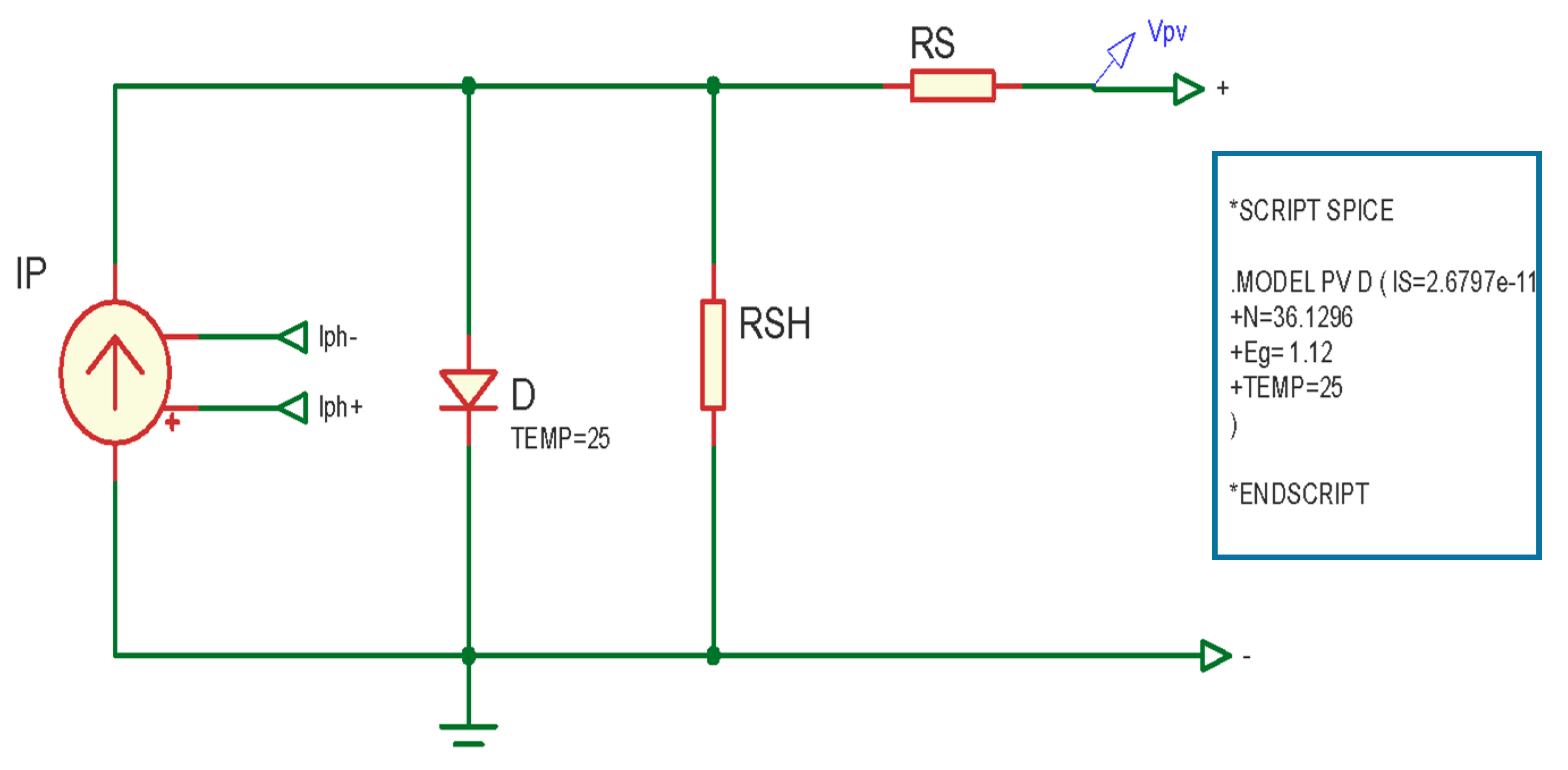
2.1.2. Proteus PV Panel Model
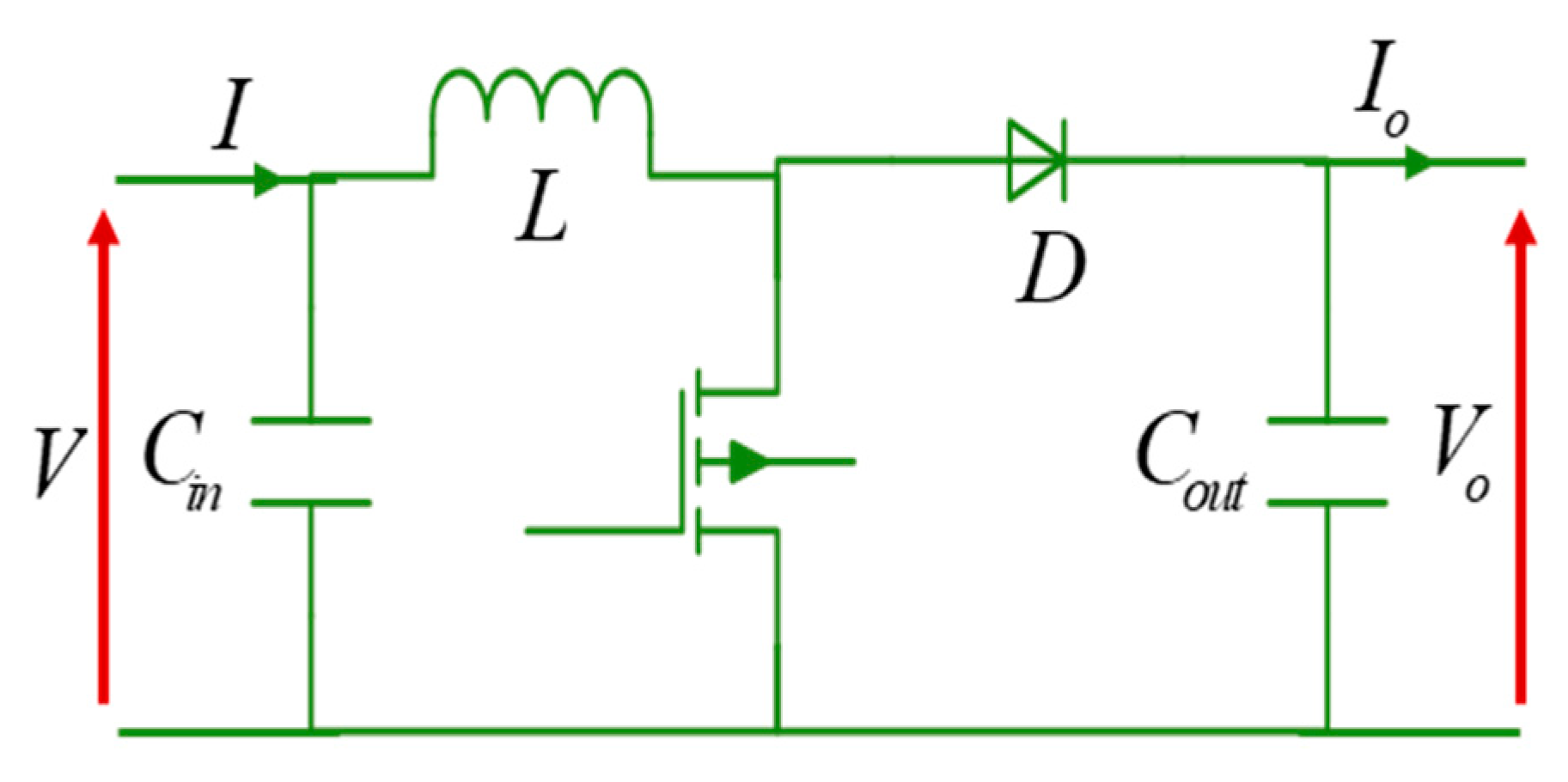
2.1.3. DC-DC Boost Converter
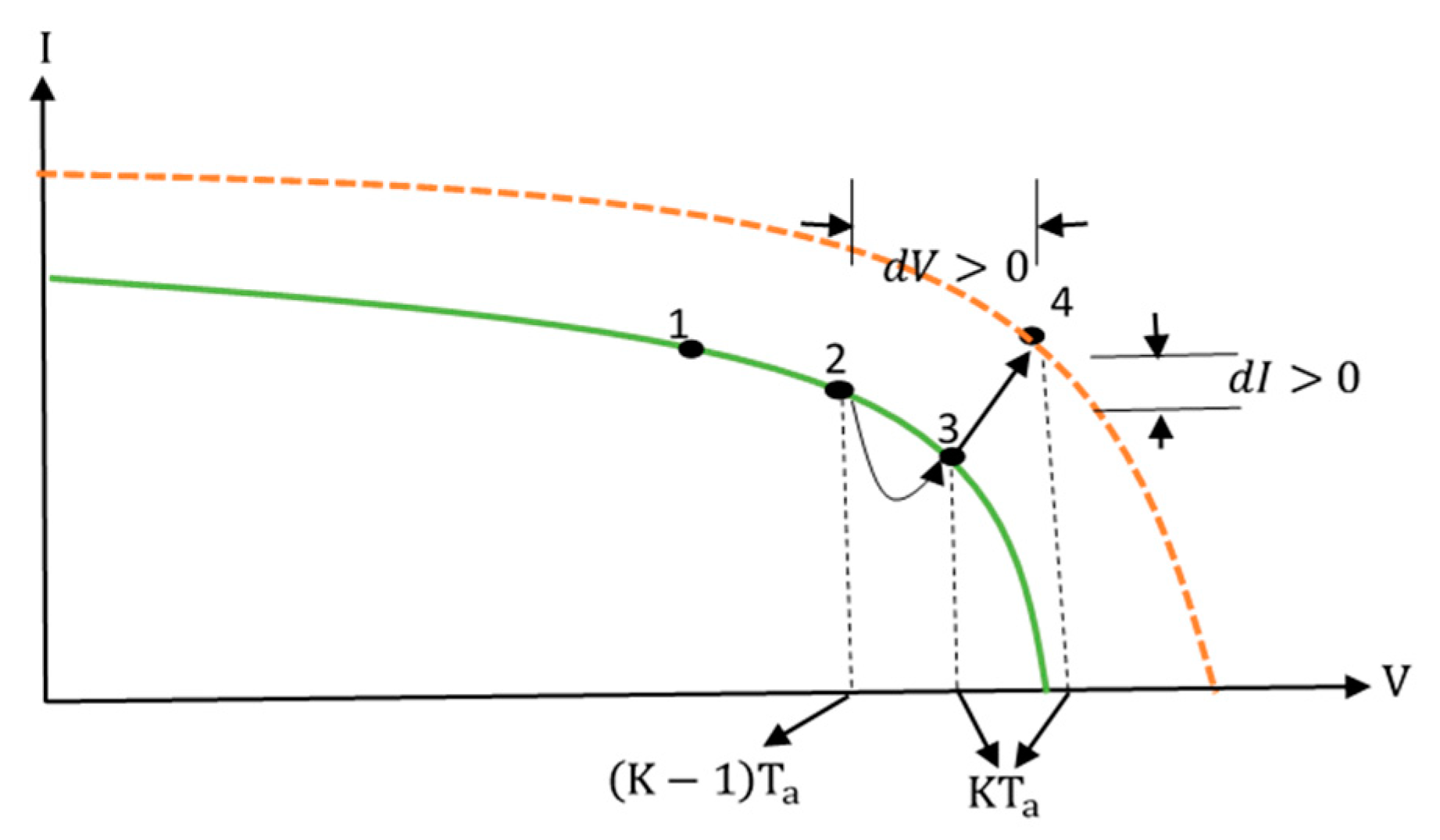
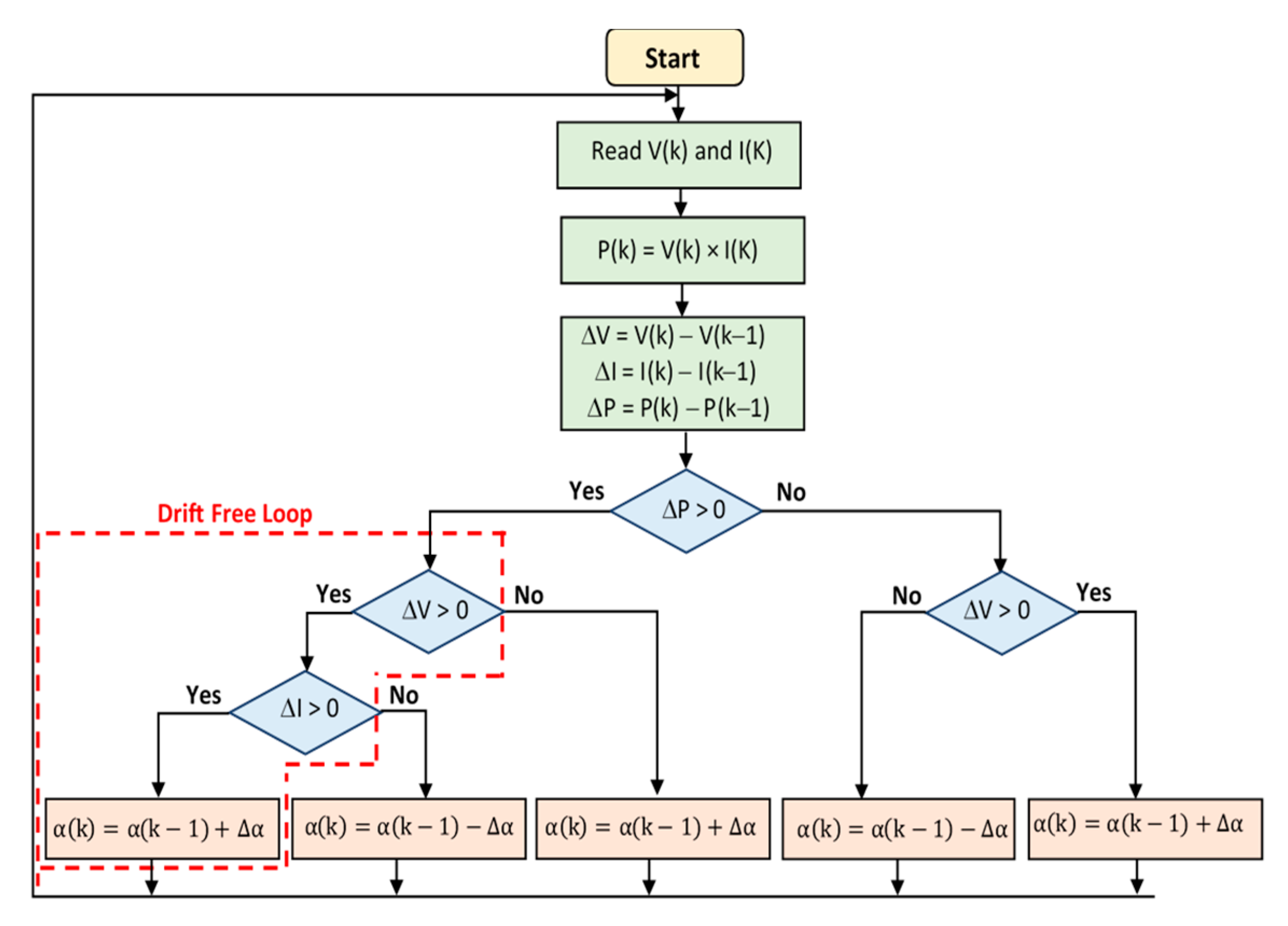
2.1.4. MPPT algorithm
2.2. PV System Design in Proteus Software
- Block (1): presents the subcircuit of the PV panel model.
- Block (2): presents the boost converter.
- Block (3): presents the embedded board (Arduino Uno).
- Block (4): presents the LCD screen, which is used to display the values of PV voltage, current and power.
- Block (5): presents the driver (TC4420), which is used to control the metal–oxide–semiconductor field-effect transistor (MOSFET) transistor of the Boost converter.
- Block (6): presents the current sensor (INA169) used for measuring the PV current. The modelization of this sensor is based on the INA168, which is available in the Proteus Tool. In order to model this sensor, you will need to follow the next steps:
- ✓
- Launch the Proteus tool application.
- ✓
- Open the Pick Devices.
- ✓
- Select the INA168 component.
- ✓
- Add two resistances (0.1 Ω) and (50 KΩ). Where Rs is a shunt resistor placed in series between the output of the PV module and the Boost converter, and RL is a load resistor connected between the Pin 1 of the INA168 and the ground.
- ✓
- Set the power-supply voltage to 6 V in order to adapt it with that of INA169.
Then, the PV panel output current can be defined by the Equation (13) [25]. - Block (7): presents the module of the voltage sensor (B25 Voltage Sensor Module) used for measuring the PV voltage [26]. It is basically a voltage divider using two series resistances. The PV panel output voltage is defined by Equation (14):where and
- Block (8): presents the graph analysis, it is used to display the simulation results.
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| PV | photovoltaic |
| CAs | conventional algorithms |
| MPPT | maximum power point tracking |
| HC | Hill-Climbing |
| GMPP | global maximum power point |
| PCB | printed circuit board |
Nomenclatures
| The diode ideality factor of the solar cell | |
| The photocurrent of the solar cell [A] | |
| The output current of the Boost converter [A] | |
| The current at MPP [A] | |
| The solar irradiance level [W/m2] | |
| The solar irradiance nominal [W/m2] | |
| The constant of Boltzmann [J. K-1] | |
| The number of cells connected in series | |
| The load resistance [Ω] | |
| The equivalent input resistance of the converter Boost [Ω] | |
| The series resistance of the solar cell [Ω] | |
| The shunt resistance of the solar cell [Ω] | |
| The junction temperature [K] | |
| The nominal temperatures [K] | |
| The PV panel output voltage [V] | |
| The voltage at MPP [V] | |
| The Boost output voltage [V] | |
| The efficiency of the DC-DC converter Boost [%] | |
| The duty cycle. |
References
- Kousksou, T.; Allouhi, A.; Belattar, M.; Jamil, A.; El Rhafiki, T.; Arid, A.; Zeraouli, Y. Renewable energy potential and national policy directions for sustainable development in Morocco. Renew. Sustain. Energy Rev. 2015, 47, 46–57. [Google Scholar] [CrossRef]
- Kabir, E.; Kumar, P.; Kumar, S.; Adelodun, A.A.; Kim, K.H. Solar energy: Potential and future prospects. Renew. Sustain. Energy Rev. 2018, 82, 894–900. [Google Scholar] [CrossRef]
- Subramaniam, U.; Vavilapalli, S.; Padmanaban, S.; Blaabjerg, F.; Holm-Nielsen, J.B.; Almakhles, D. A Hybrid PV-Battery System for ON-Grid and OFF-Grid Applications—Controller-In-Loop Simulation Validation. Energies 2020, 13, 755. [Google Scholar] [CrossRef] [Green Version]
- Subudhi, B.; Pradhan, R. A comparative study on maximum power point tracking techniques for photovoltaic power systems. IEEE Trans. Sustain. Energy 2013, 4, 89–98. [Google Scholar] [CrossRef]
- Ferrero Bermejo, J.; Gómez Fernández, J.F.; Pino, R.; Crespo Márquez, A.; Guillén López, A.J. Review and Comparison of Intelligent Optimization Modelling Techniques for Energy Forecasting and Condition-Based Maintenance in PV Plants. Energies 2019, 12, 4163. [Google Scholar] [CrossRef] [Green Version]
- Motahhir, S.; El Hammoumi, A.; El Ghzizal, A. The most used MPPT algorithms: Review and the suitable low-cost embedded board for each algorithm. J. Clean. Prod. 2019, 246, 118983. [Google Scholar] [CrossRef]
- Lee, H.S.; Yun, J.J. Advanced MPPT Algorithm for Distributed Photovoltaic Systems. Energies 2019, 12, 3576. [Google Scholar] [CrossRef] [Green Version]
- Pathy, S.; Subramani, C.; Sridhar, R.; Thentral, T.; Padmanaban, S. Nature-inspired MPPT algorithms for partially shaded PV systems: A comparative study. Energies 2019, 12, 1451. [Google Scholar] [CrossRef] [Green Version]
- Bahrami, M.; Gavagsaz-Ghoachani, R.; Zandi, M.; Phattanasak, M.; Maranzanaa, G.; Nahid-Mobarakeh, B.; Pierfederici, S.; Meibody-Tabar, F. Hybrid maximum power point tracking algorithm with improved dynamic performance. Renew. Energy 2019, 130, 982–991. [Google Scholar] [CrossRef]
- Huang, C.; Wang, L.; Yeung, R.S.C.; Zhang, Z.; Chung, H.S.H.; Bensoussan, A. A prediction model-guided Jaya algorithm for the PV system maximum power point tracking. IEEE Trans. Sustain. Energy 2017, 9, 45–55. [Google Scholar] [CrossRef]
- Bingöl, O.; Özkaya, B. Analysis and comparison of different PV array configurations under partial shading conditions. Solar Energy 2018, 160, 336–343. [Google Scholar] [CrossRef]
- Belhachat, F.; Larbes, C. Comprehensive review on global maximum power point tracking techniques for PV systems subjected to partial shading conditions. Solar Energy 2019, 183, 476–500. [Google Scholar] [CrossRef]
- Huang, C.; Wang, L.; Zhang, Z.; Yeung, R.S.C.; Bensoussan, A.; Chung, H.S.H. A Novel Spline Model Guided Maximum Power Point Tracking Method for Photovoltaic Systems. IEEE Trans. Sustain. Energy 2019. [CrossRef]
- Ishaque, K.; Salam, Z. A comprehensive MATLAB Simulink PV system simulator with partial shading capability based on two-diode model. Solar Energy 2011, 9, 2217–2227. [Google Scholar] [CrossRef]
- Bagyaveereswaran, V.; Umashankar, S.; Arulmozhivarman, P. Simulation Tool for Tuning and Performance Analysis of Robust, Tracking, Disturbance Rejection and Aggressiveness Controller. Algorithms 2019, 12, 144. [Google Scholar] [CrossRef] [Green Version]
- Motahhir, S.; El Ghzizal, A.; Sebti, S.; Derouich, A. Proposal and Implementation of a novel perturb and observe algorithm using embedded software. In Proceedings of the 2015 3rd International Renewable and Sustainable Energy Conference (IRSEC), Marrakech, Morocco, 10–13 December 2015; pp. 1–5. [Google Scholar]
- Motahhir, S.; Chalh, A.; El Ghzizal, A.; Sebti, S.; Derouich, A. Modeling of Photovoltaic Panel by using Proteus. J. Eng. Sci. Technol. Rev. 2017, 10, 8–13. [Google Scholar] [CrossRef]
- Motahhir, S.; Chalh, A.; El Ghzizal, A.; Derouich, A. Development of a low-cost PV system using an improved INC algorithm and a PV panel Proteus model. J. Clean. Prod. 2018, 204, 355–365. [Google Scholar] [CrossRef]
- Motahhir, S. Data for: Development of a low-cost PV system using an improved INC algorithm and a PV panel Proteus model. Mendeley Data 2020. [Google Scholar] [CrossRef]
- Motahhir, S. PV Panel in Proteus. Mendeley Data 2017. [Google Scholar] [CrossRef]
- Yaqoob, S.J.; Obed, A.A. Modeling, Simulation and Implementation of PV System by Proteus Based on Two-diode Model. J. Tech. 2019, 1, 39–51. [Google Scholar]
- Chaibi, Y.; Salhi, M.; El-Jouni, A.; Essadki, A. A new method to extract the equivalent circuit parameters of a photovoltaic panel. Solar Energy 2018, 163, 376–386. [Google Scholar] [CrossRef]
- Killi, M.; Samanta, S. Modified perturb and observe MPPT algorithm for drift avoidance in photovoltaic systems. IEEE Trans. Ind. Electron. 2015, 62, 5549–5559. [Google Scholar] [CrossRef]
- Xiao, W.; Dunford, W.G. A modified adaptive hill climbing MPPT method for photovoltaic power systems. In Proceedings of the 2004 IEEE 35th Annual Power Electronics Specialists Conference (IEEE Cat. No. 04CH37551), Aachen, Germany, 20–25 June 2004; Volume 3, pp. 1957–1963. [Google Scholar]
- INA1x9 Datasheet [WWW Document]. 2017. Available online: www.ti.com (accessed on 8 January 2018).
- Voltage Sensor Module-Arduino Compatible [WWW Document], n.d. Available online: https://www.emartee.com/product/42082/VoltageSensor (accessed on 8 January 2018).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TDC-M20-36 | |
|---|---|
| Pmax of PV panel | 20 W |
| Vmpp at Pmax of PV panel | 18.76 V |
| Impp at Pmax of the PV panel | 1.07 A |
| Current Isc at Short-circuit (SC) | 1.17 A |
| Voltage Voc at Open-circuit (OC) | 22.70 V |
| Temperature coefficient Kv at OC | −0.35%/°C |
| Temperature coefficient Ki at SC | −0.043%/°C |
| Number of cells | 36 |
| Parameters | Value |
|---|---|
| L | 20 mH |
| Cin | 220 µF |
| Cout | 470 µF |
| fs | 1 kHz |
| MPPT Algorithms | G = 500 W/m2 | G = 750 W/m2 | G = 1000 W/m2 | |||
|---|---|---|---|---|---|---|
| Efficiency | Response Time | Efficiency | Response Time | Efficiency | Response Time | |
| Conventional HC | 98.39% | 10 ms | 98.55% | 80 ms | 98.85% | 80 ms |
| Modified HC | 99.11% | 5 ms | 99.15% | 10 ms | 99.21% | 10 ms |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chalh, A.; El Hammoumi, A.; Motahhir, S.; El Ghzizal, A.; Subramaniam, U.; Derouich, A. Trusted Simulation Using Proteus Model for a PV System: Test Case of an Improved HC MPPT Algorithm. Energies 2020, 13, 1943. https://doi.org/10.3390/en13081943
Chalh A, El Hammoumi A, Motahhir S, El Ghzizal A, Subramaniam U, Derouich A. Trusted Simulation Using Proteus Model for a PV System: Test Case of an Improved HC MPPT Algorithm. Energies. 2020; 13(8):1943. https://doi.org/10.3390/en13081943
Chicago/Turabian StyleChalh, Abdelilah, Aboubakr El Hammoumi, Saad Motahhir, Abdelaziz El Ghzizal, Umashankar Subramaniam, and Aziz Derouich. 2020. "Trusted Simulation Using Proteus Model for a PV System: Test Case of an Improved HC MPPT Algorithm" Energies 13, no. 8: 1943. https://doi.org/10.3390/en13081943
APA StyleChalh, A., El Hammoumi, A., Motahhir, S., El Ghzizal, A., Subramaniam, U., & Derouich, A. (2020). Trusted Simulation Using Proteus Model for a PV System: Test Case of an Improved HC MPPT Algorithm. Energies, 13(8), 1943. https://doi.org/10.3390/en13081943