3.1. Results in the Frequency Domain
Using the data obtained in the experiments, we have applied the algorithm described in the
Section 2.2 in order to obtain the indication variable in the frequency domain, based on the bispectrum of the flux signal. This enabled us to discriminate between the healthy and faulty conditions of an induction motor. The bispectrum has been calculated in a window of 1024 samples, which results in a square matrix, where the number of rows and columns coincides with the data window to be processed, i.e., 1024 × 1024.
We have used the algorithm based on the bispectruminstead of the analysis based on the one-dimensional Fourier transform. The reason is the following: when applying the proposed method using the sum of the mean of the frequency spectrum absolute value, no relative differences were observed between the healthy and the damagedstates if the one-dimensional Fourier transform is used, as mentioned above.
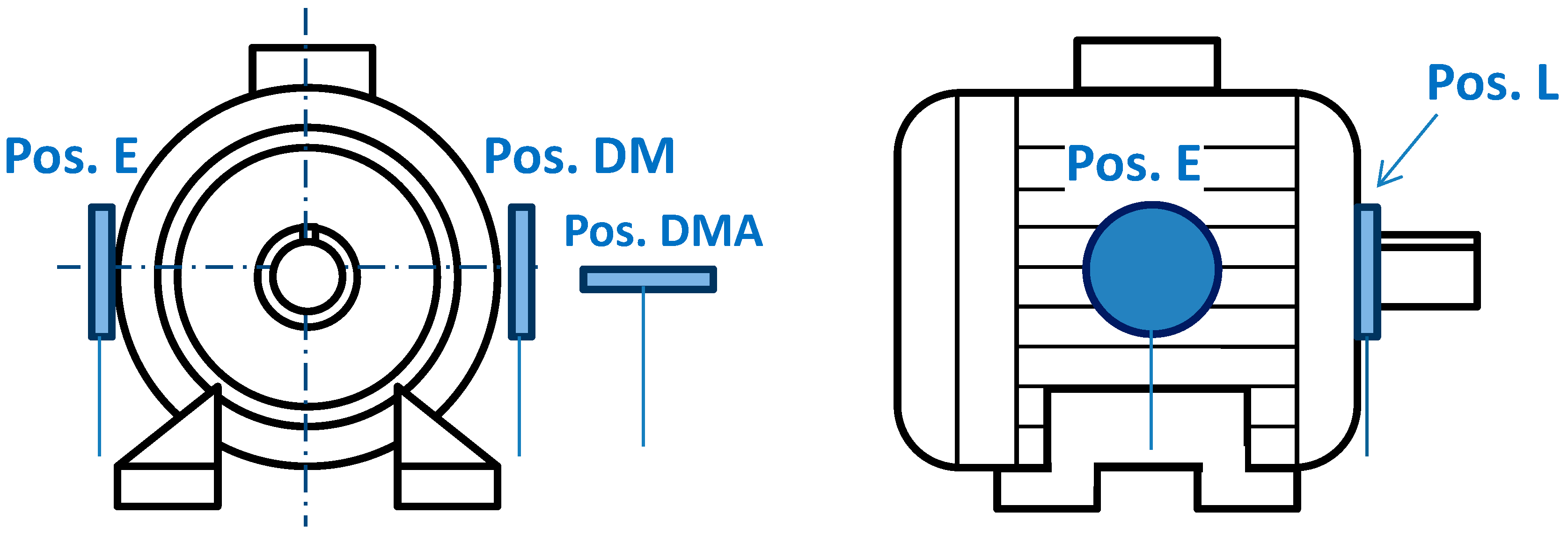
This statement has been checked using sample 0 (position DMA of
Table 1) corresponding to the samples of flux signals of the healthy motor and comparing the results with sample 0 (position DMA of
Table 2) corresponding to the samples of flux signals of the motor with one broken rotor bar. The obtained results are shown in
Figure 2 and
Table 5, respectively.
In
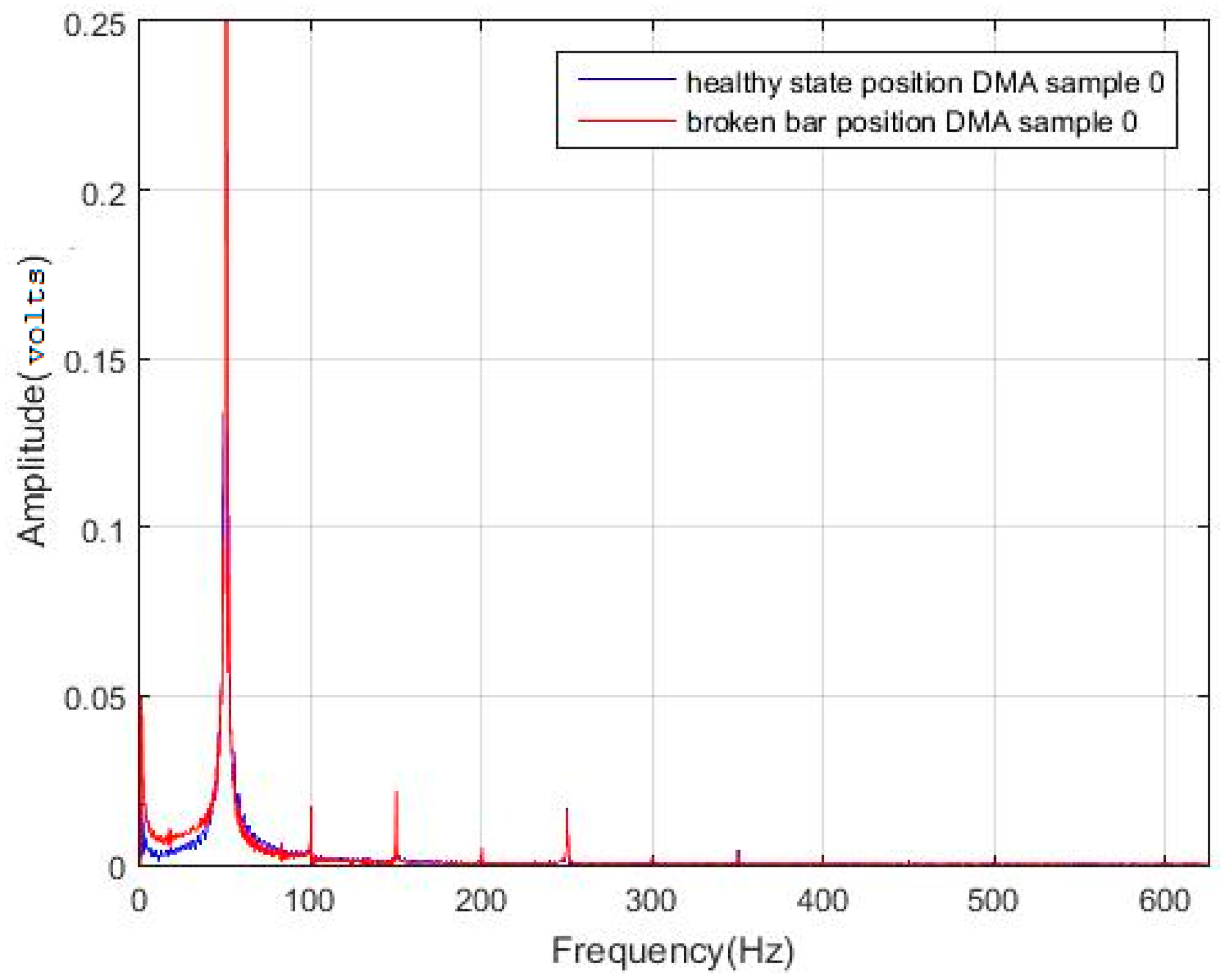
Table 5, the difference that exists between both values of the indicator is 2.7857·10
−5, which is not significant to reliably discriminate between healthy and faulty conditions. Likewise, in
Figure 2, no relevant differences are clearly observed in the spectra of both samplesfor the same position (DMA).
Taking into consideration the previous results, we decided to use the bispectrum of the flux signals. The algorithm based on Equations (4) and (5) was applied to obtain an indication variable that was able to detect differences between the healthy and damaged conditions.
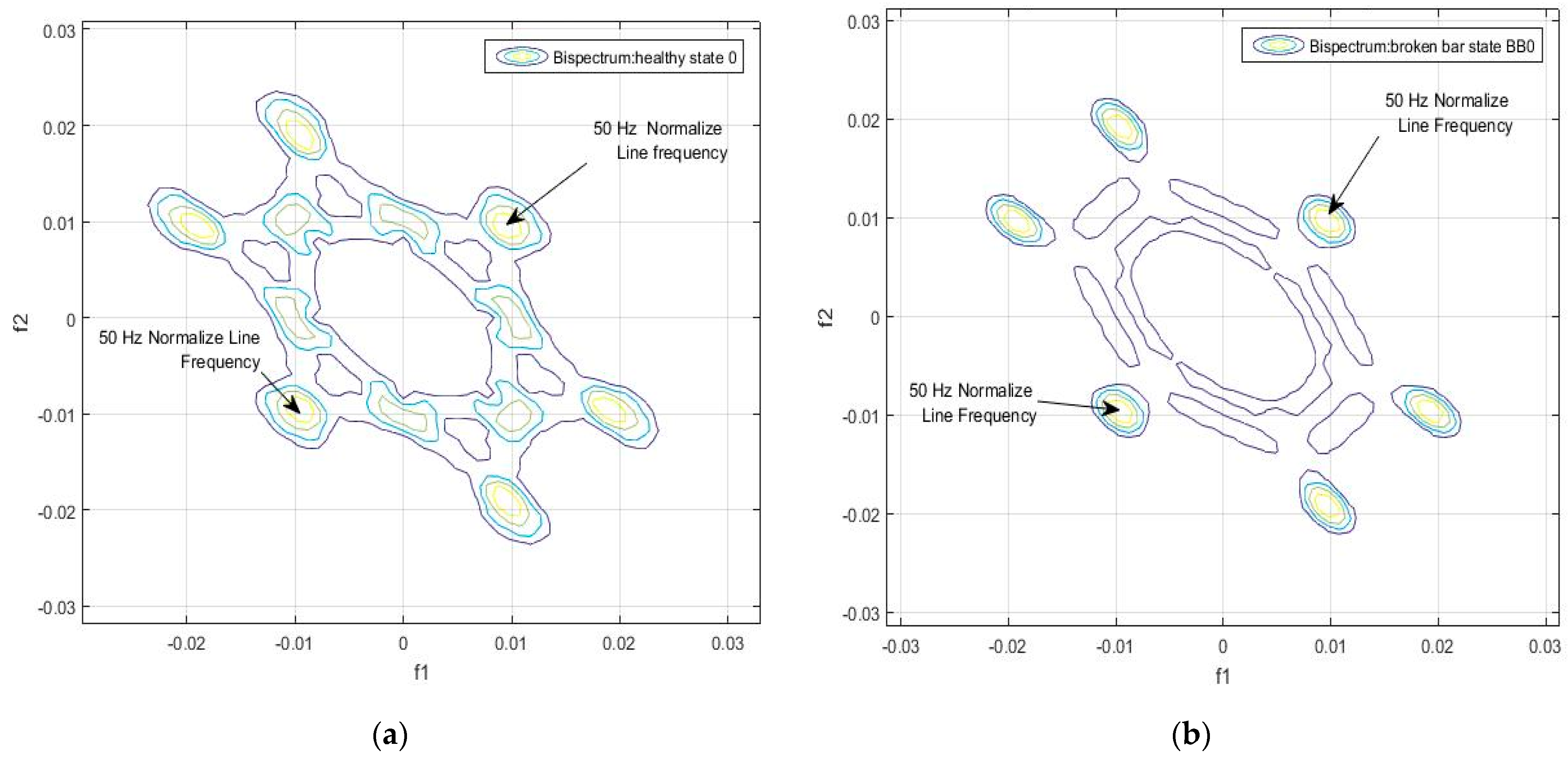
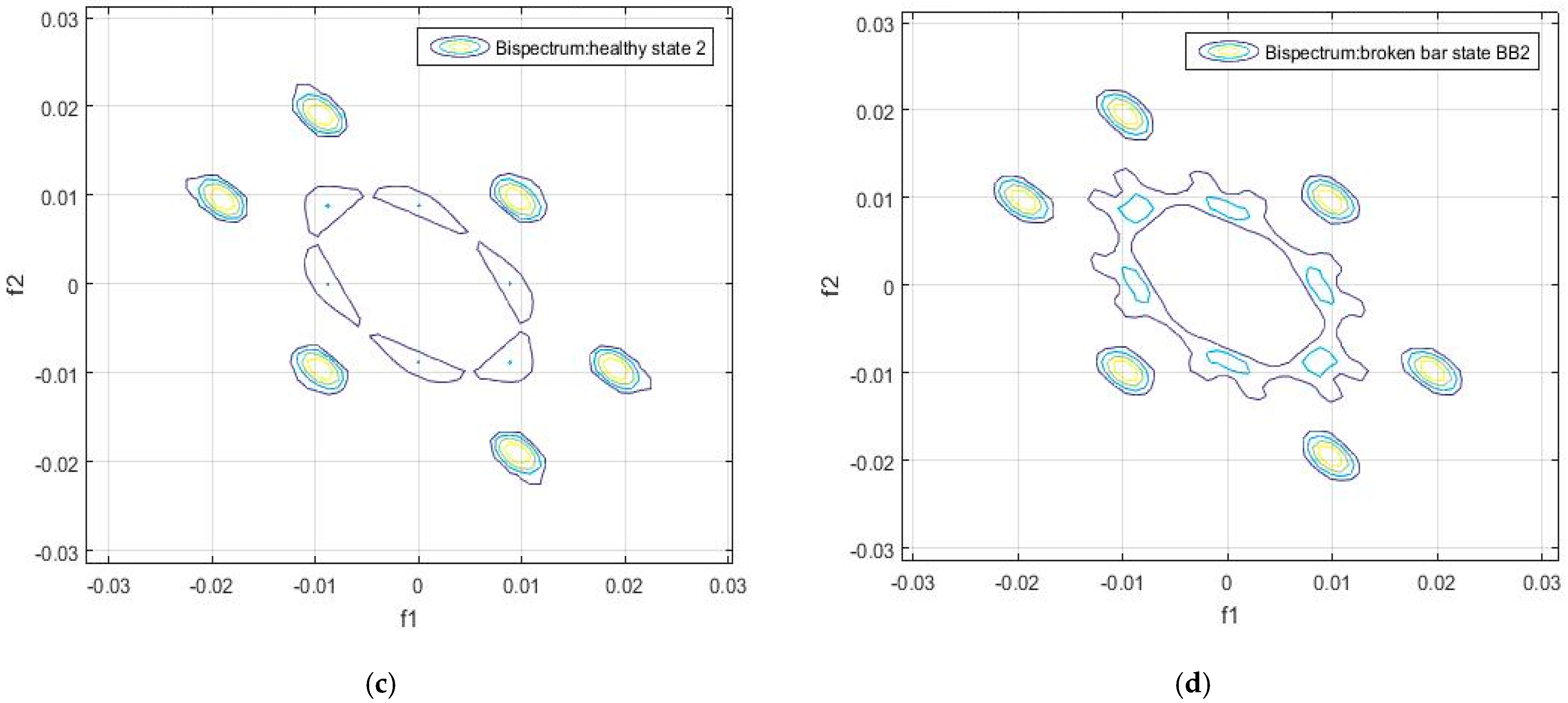
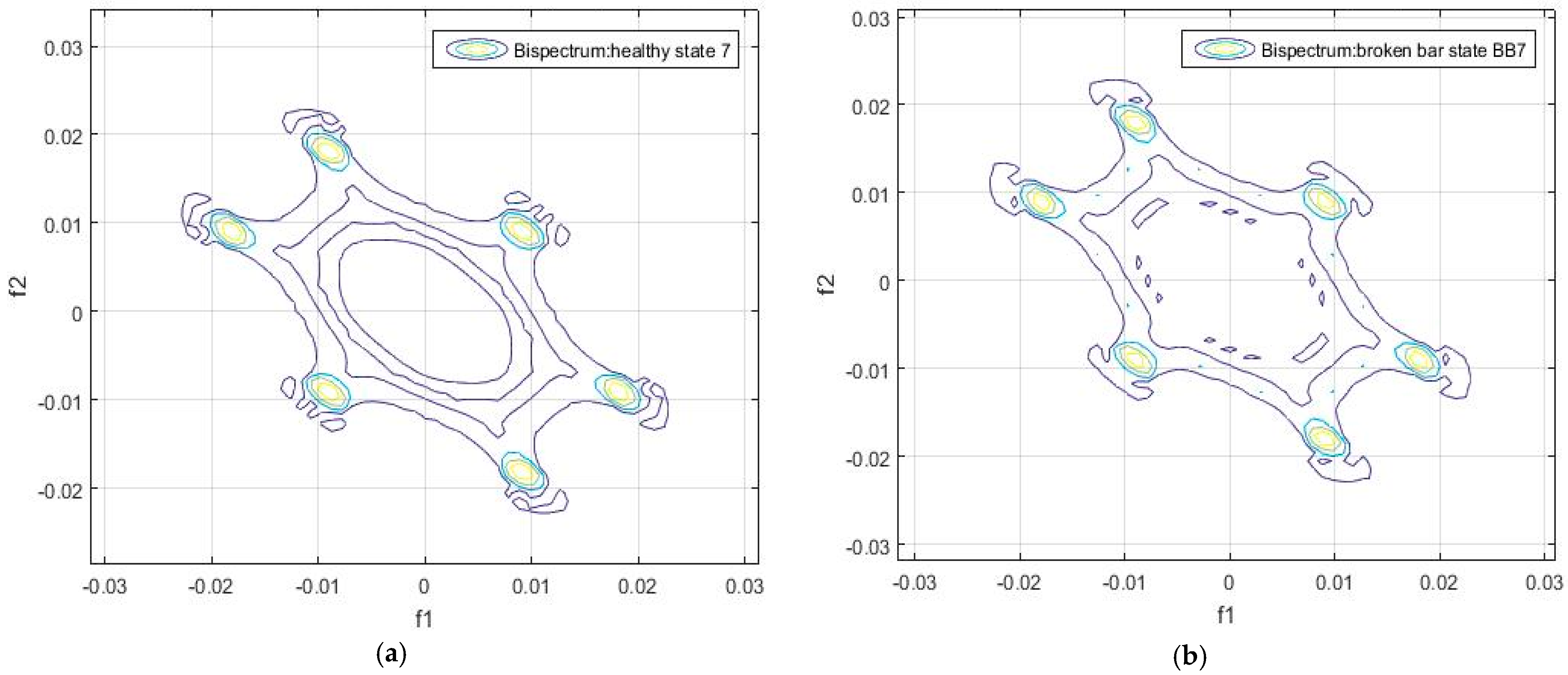
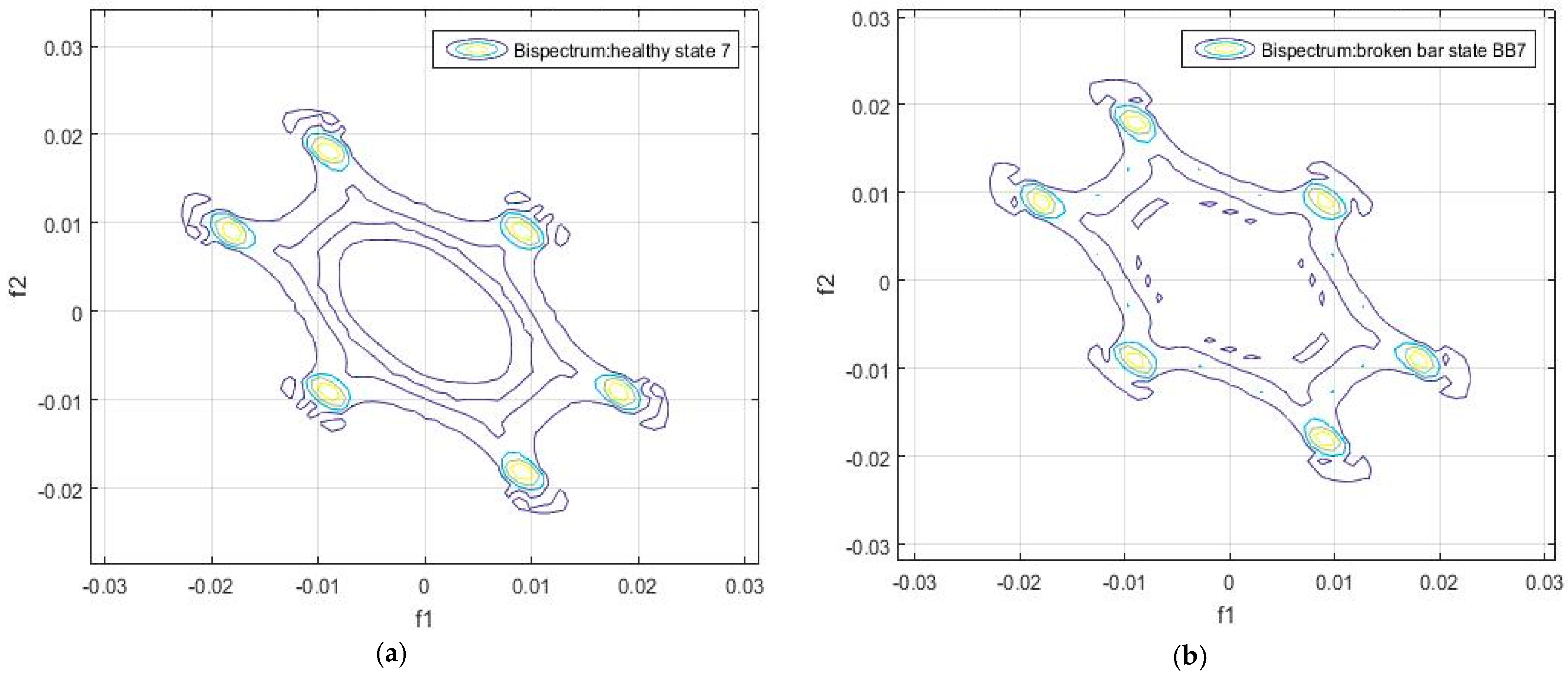
Figure 3 shows the bispectrum of the flux signal in the healthy state (sample 0, position DMA) and faulty state (sample 0, position DMA).
As can be seen in
Figure 3, the bispectrum has two circles corresponding to fundamental frequency values of the form
in this case (0.01,0.01), which corresponds to the frequency of 50 Hz (normalized to 1), depicted in
Figure 2, corresponding to the frequency spectrum using the one-dimensional Fourier transform.
Similarly, around these two points there are other four circles which correspond to the frequency values, multiples of the fundamental frequency of 50 Hz. As shown in
Figure 3, there are differences between the bispectrum of the flux signal of the healthy motor and of the damaged motor.
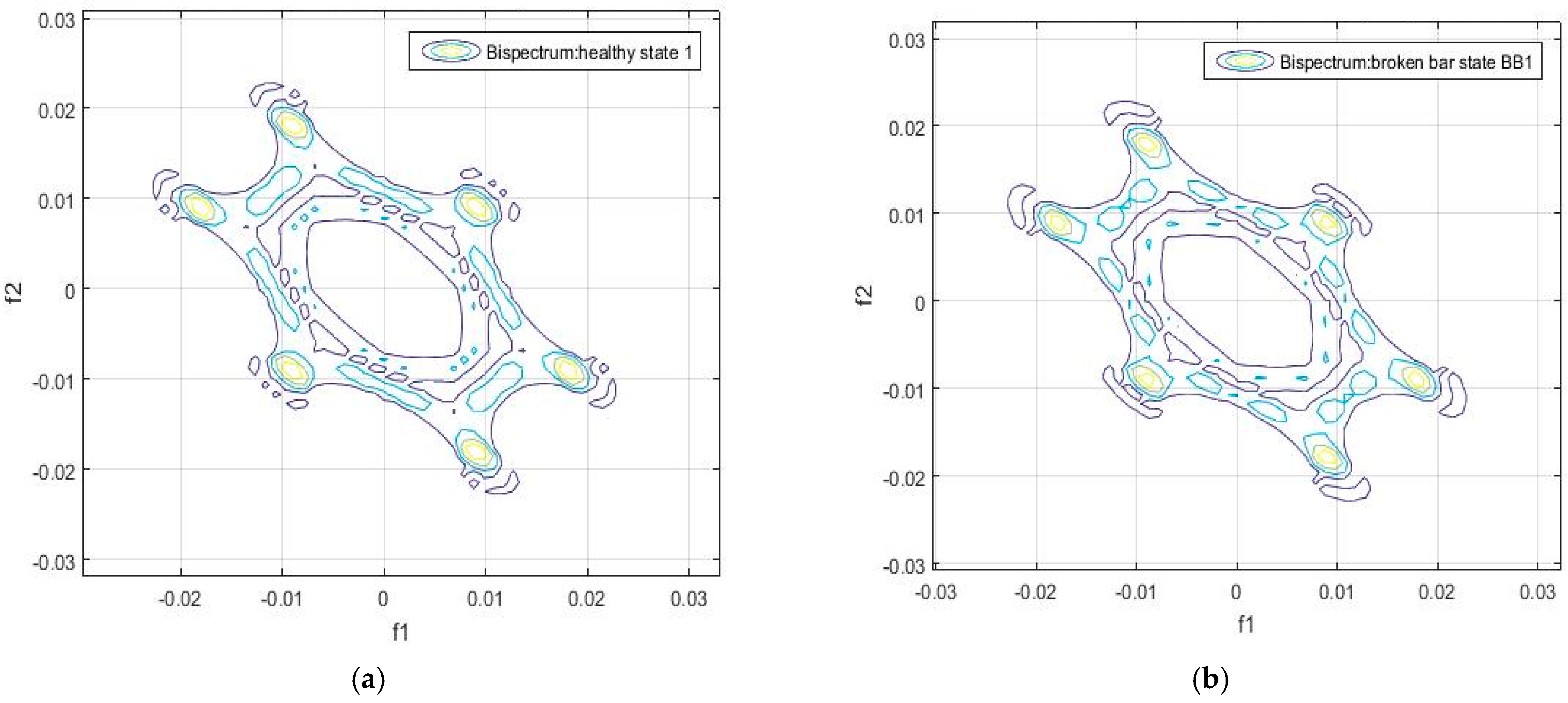
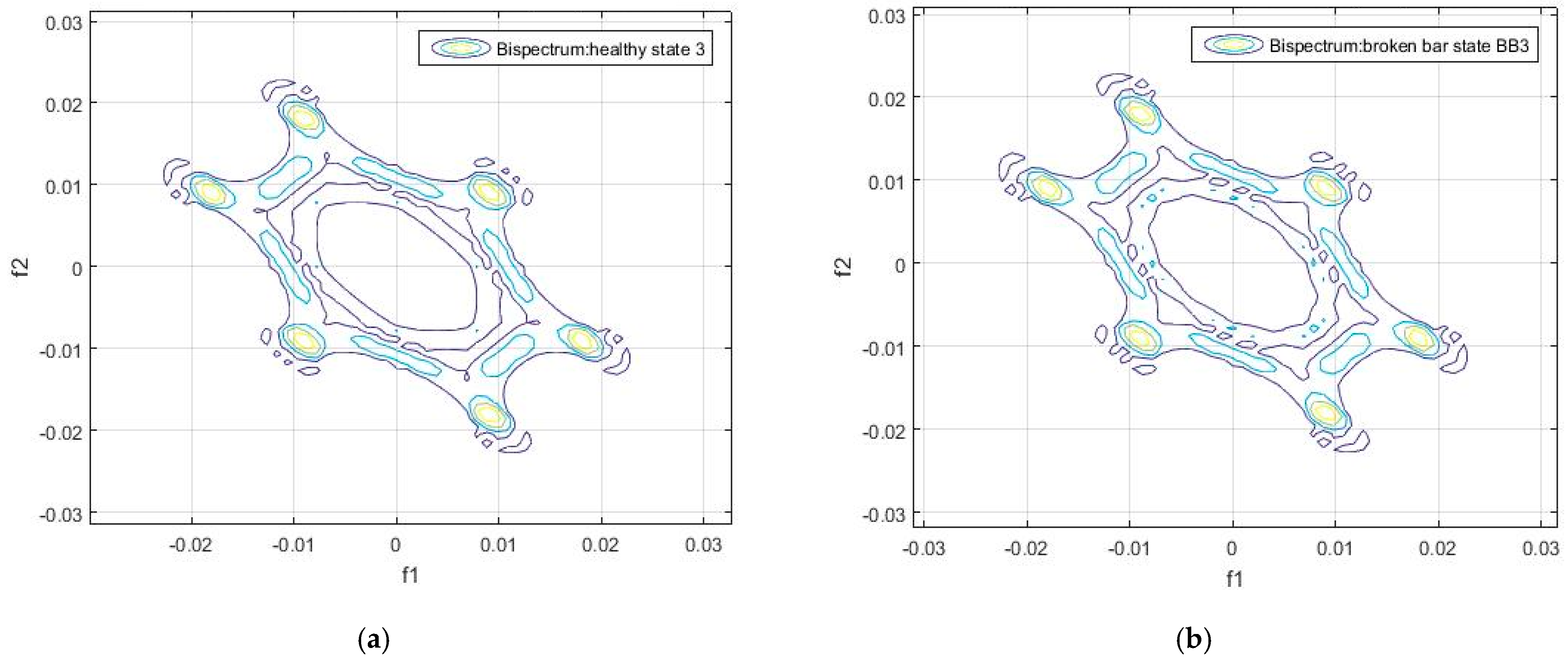
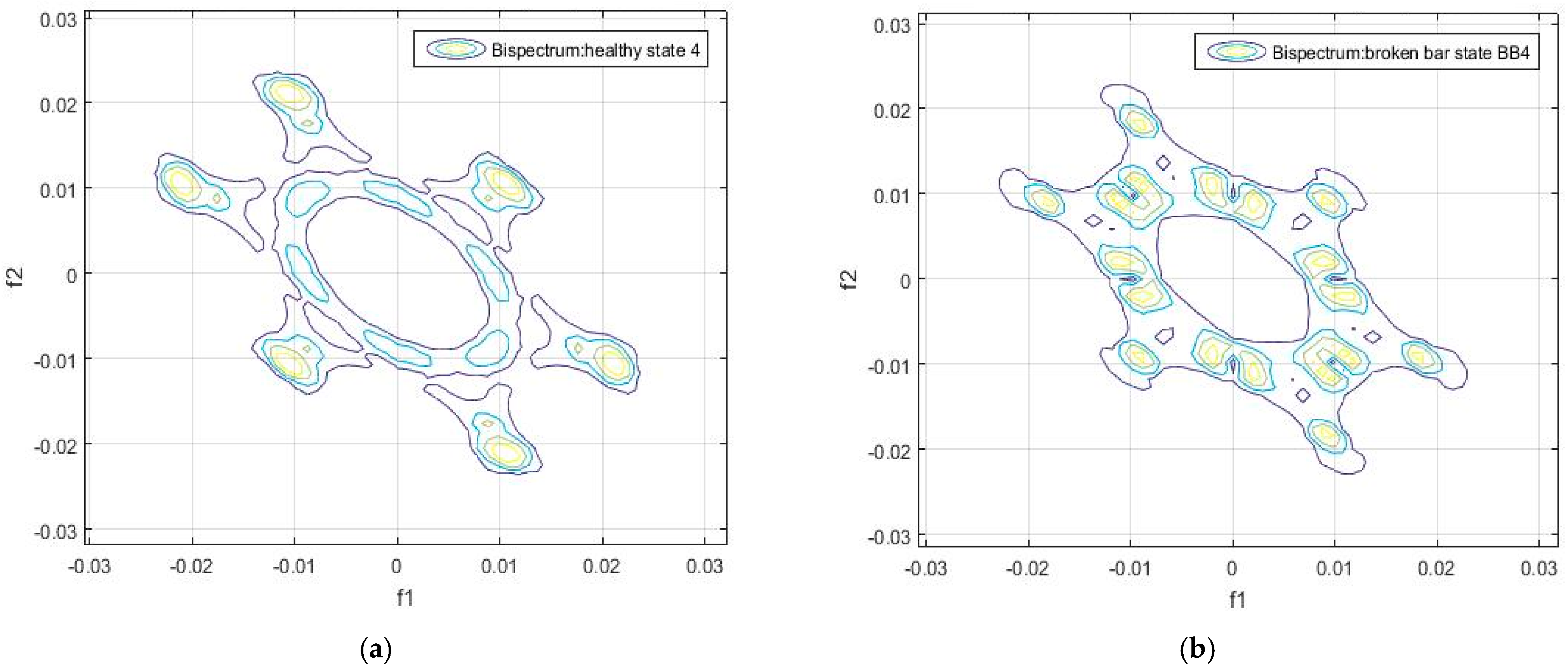
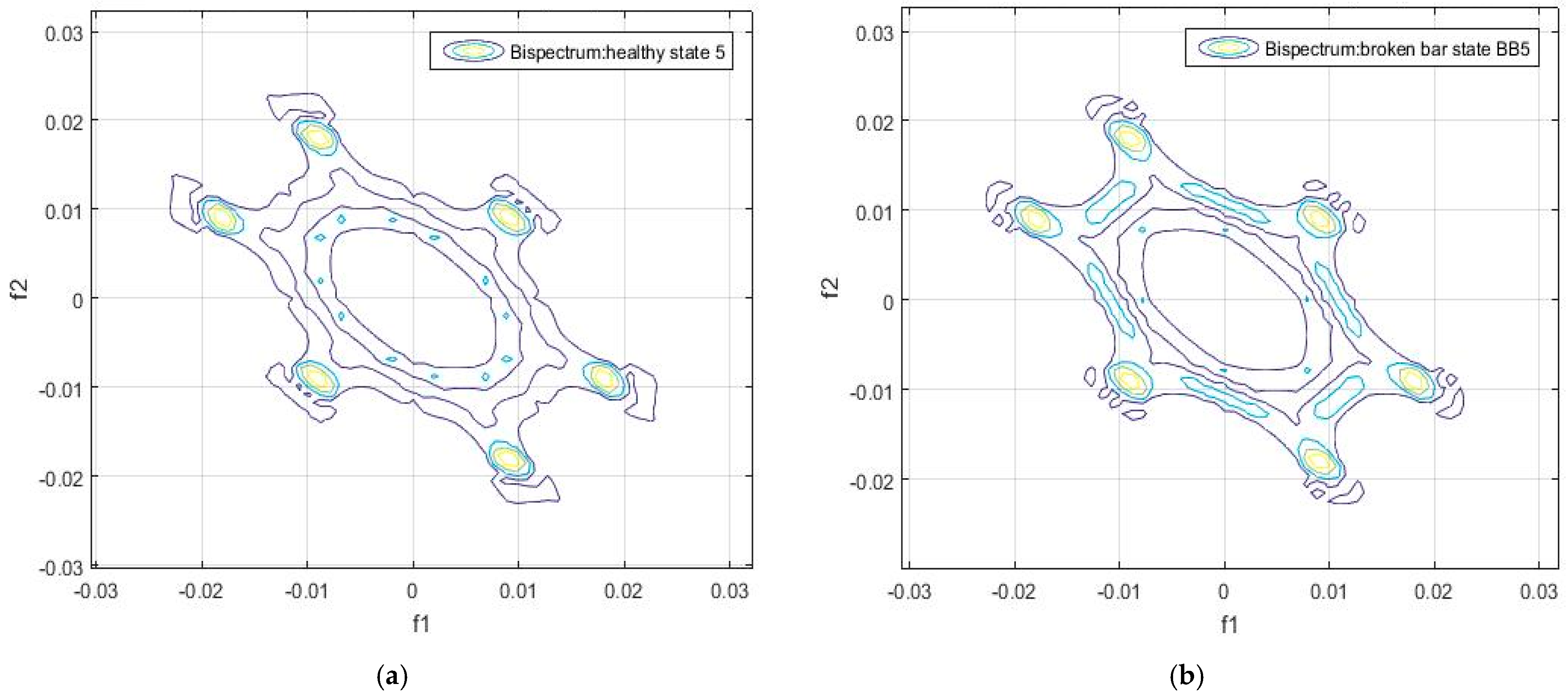
These six circles visualized in the contour of the bispectrum appear in all the analyzed samples, both in the healthy and in the faulty state conditions. This can be observed in
Figure 4,
Figure 5,
Figure 6,
Figure 7,
Figure 8 and
Figure 9.
In
Figure 3,
Figure 4,
Figure 5 and
Figure 6 we show the differences in the bispectrum between the healthy and the damaged motors, for the different positions at which the measurements of the flux signals were taken. Note that in some graphs there are more substantial differences, such as in
Figure 3 as well as in
Figure 4c,d. The differences depend on the position in which the measurement was taken, as well as on the load, and on the supply, and will also depend on obtaining a more or less significant difference in relation to the value of the indicator in the frequency domain (Equation (5)).
The calculation of the indicator in the frequency domain based on Equations (4) and (5) was performed for the data in
Table 1,
Table 2,
Table 3 and
Table 4, which correspond to the motor under healthy and faulty conditions. The obtained results are shown in
Table 5 and
Table 6.
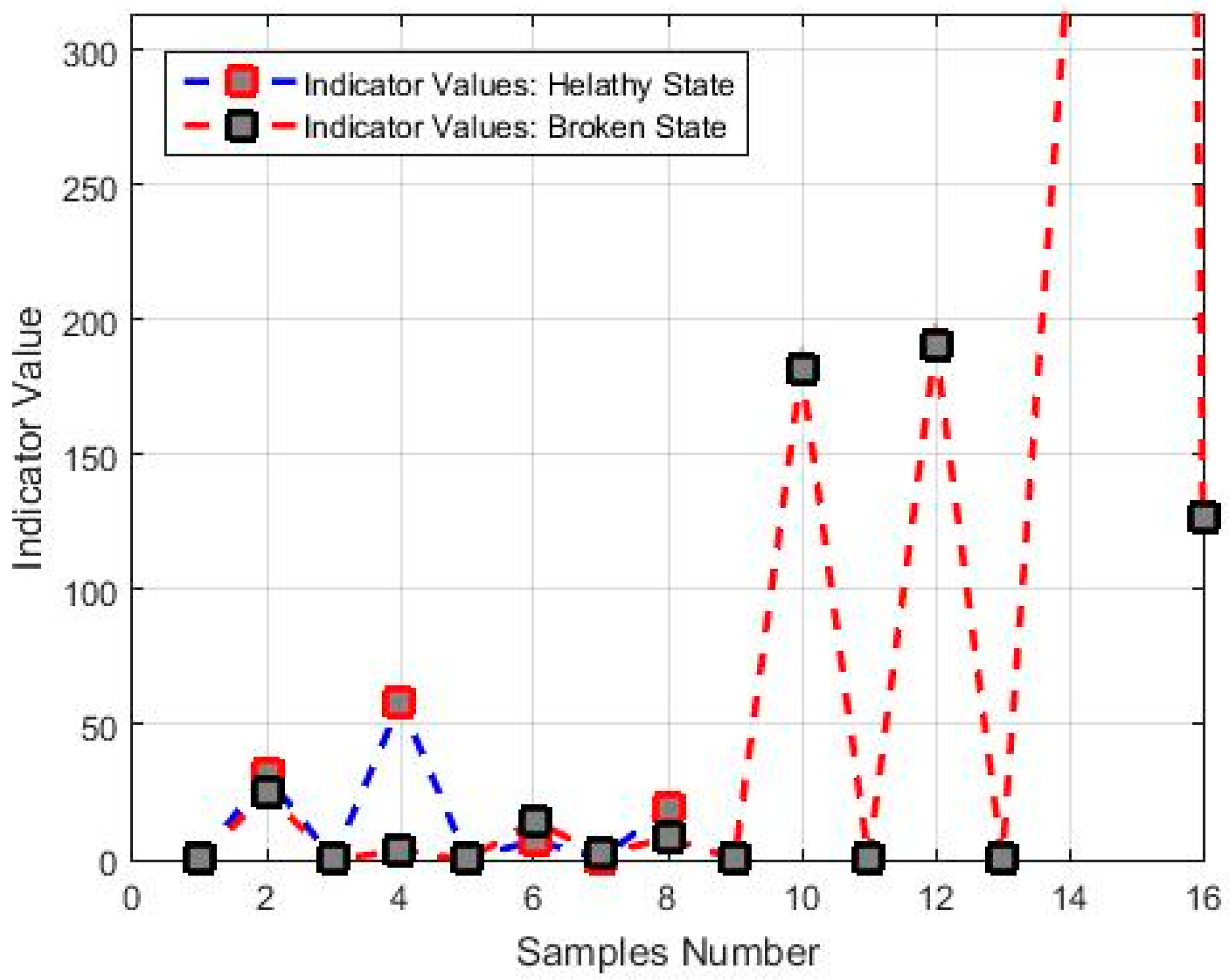
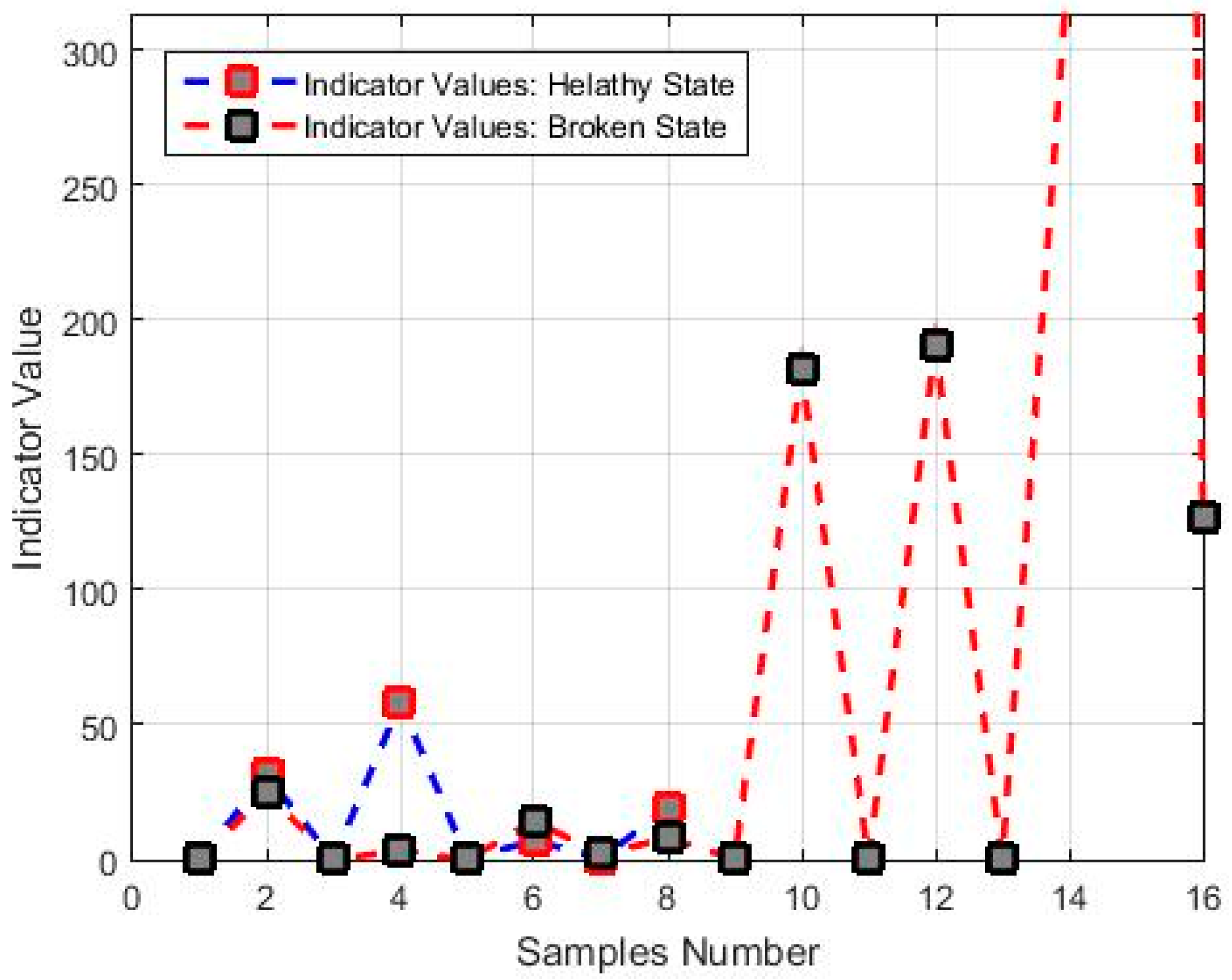
From the results shown in
Table 6 and
Table 7, it can be seen that for similar operating conditions, the indicator in the frequency domain depends on the position of the sensor, as can be seen for samples 0, 4, 8 and 14. In these cases, the relative differencesare appreciable and it is possible to discern between one state and the other. On the other hand, the difference in the values of the indicator for the other positions, such as with samples 2 and 6, is not significant. In any case, the values of the indicator for the faulty condition are always greater than those of the equivalent healthy one.
On the other hand, we show in
Table 8 and
Table 9 show the values of the indicator when the motor works at steady-state (100% of the nominal voltage).
From the results shown in
Table 8 and
Table 9, it is noted that the differences between the values of the indicator in the frequency domain for healthy and faulty conditionsare not significant when the motor works at steady state. This may be due to the fact that, during startup, certain harmonics vary in frequency and amplitude [
9]. This does not happen under the steady state regime, during which the harmonics maintain well-defined frequencies and amplitudes, as long as the load level does not change.
From the results shown in the above tables, it can be deduced that, under the healthy condition, the indicator in the frequency domainreachesa maximum value of 30.38804, and the minimum value is 0.597756. On the other hand, the indicator for the faulty condition (motor with a broken bar) ranges between 0.709328 and 41.0198. The value of the indicator for the healthy condition never exceeds the value of 31 for all measurements.
All the comparisons related to the values of the indicator have been carried out between measurements that were obtained under similar operating conditions. This leads to the conclusion that the position of the sensor plays a crucial role and that significant differences are not obtained in every position.

 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}