1. Introduction
Electric vehicles (EVs) have received significant attention because of the global environmental crisis and pressure on energy sources. Compared to conventional vehicles, electric vehicles can recapture kinetic energy during deceleration using a regenerative braking system without requiring any additional components [
1]. A regenerative braking system can recover kinetic energy into a battery through an electric motor, which is also used to produce a regenerative braking torque to the wheels to realize braking [
2]. Research shows that more than half of the braking energy can potentially be used in typical urban driving cycles [
3]. Hence, to improve the energy efficiency, regenerative braking and friction braking cooperative systems are widely used in EVs [
4]. In a cooperative braking system, two types of regenerative braking control strategies are used: series and parallel. In the parallel strategy, the regenerative braking torque is added into the friction braking torque at a fixed proportion. In the series strategy, the proportion of the regenerative braking torque and the friction braking torque can be modulated to control the overall braking torque for meeting the requirements [
5]. The regenerative braking torque depends on the motor characteristics [
6], the charging power capability of the battery [
7], and the available tire–road friction [
8]; hence, existing research has focused on improving the braking energy recovery efficiency by distributing the torque between regenerative braking and friction braking based on drivers’ demands.
In engineering practice, several rule-based regenerative braking strategies have been proposed and used in recent years. For a rear-driven electric truck, a modified control strategy that determines how to distribute the braking force between the front and rear axles was proposed by Zhang to improve the recovery efficiency [
9]. Xiao presented an integrated control strategy to coordinate regenerative and friction braking forces to deal with the braking stability and recovery efficiency when a vehicle performed normal deceleration and emergency braking [
3]. To regenerate more braking energy and move closer to the ideal braking force distribution curve, a combined braking control strategy was developed for the rear wheel-driven series hybrid electric EV to adjust the proportions of regenerative braking and friction braking [
10]. A regenerative braking cooperative control strategy was proposed by Jiweon for hybrid EVs equipped with a hydraulic brake on the rear wheels and an electronic wedge brake on the front wheels [
11].
Optimization and control technologies have also been proposed to control the cooperative braking system. A genetic algorithm-based control strategy that determines how to distribute the brake torque between regenerative braking and electrohydraulic braking was developed by Kim [
12]. Furthermore, to control the wheel slip, a sliding-mode controller was designed by Zhang to distribute the braking force between regenerative braking and antilock braking in emergency braking situations [
13]. Fuzzy logic was applied in brake energy recovery systems. Compared to the conventional control strategy, the fuzzy logic control strategy presents a higher recovery efficiency in regenerative braking [
14]. A sliding-mode controller based on the exponential reaching law for the antilock braking system was developed. The tracking of the slip ratio became rapid and accurate in adjusting the motor braking moment with the proposed sliding-mode controller [
15]. A nonlinear-model predictive controller for regenerative braking control in EVs equipped with in-wheel motors was presented [
16]. A control algorithm based on a model predictive control framework was proposed to recover more braking energy and maintain the optimal slip value. The framework could reduce the torque tracking error [
17].
The feasibility of several control strategies is worth studying, and the optimization of control parameters that affect the comprehensive braking performance, including braking stability and energy recuperation efficiency, also needs attention. Sun presented a predictive control strategy using an offline process optimization stream to realize the balance between the maximum regenerative energy recuperation efficiency and the optimum braking stability [
18,
19]. However, a problem of inconsistent braking response exists because regenerative braking and friction braking are two independent systems. In addition, some sampling points have a large predictive error when using conventional approximation models because of the highly nonlinear relationship between sampling points and predictive values.
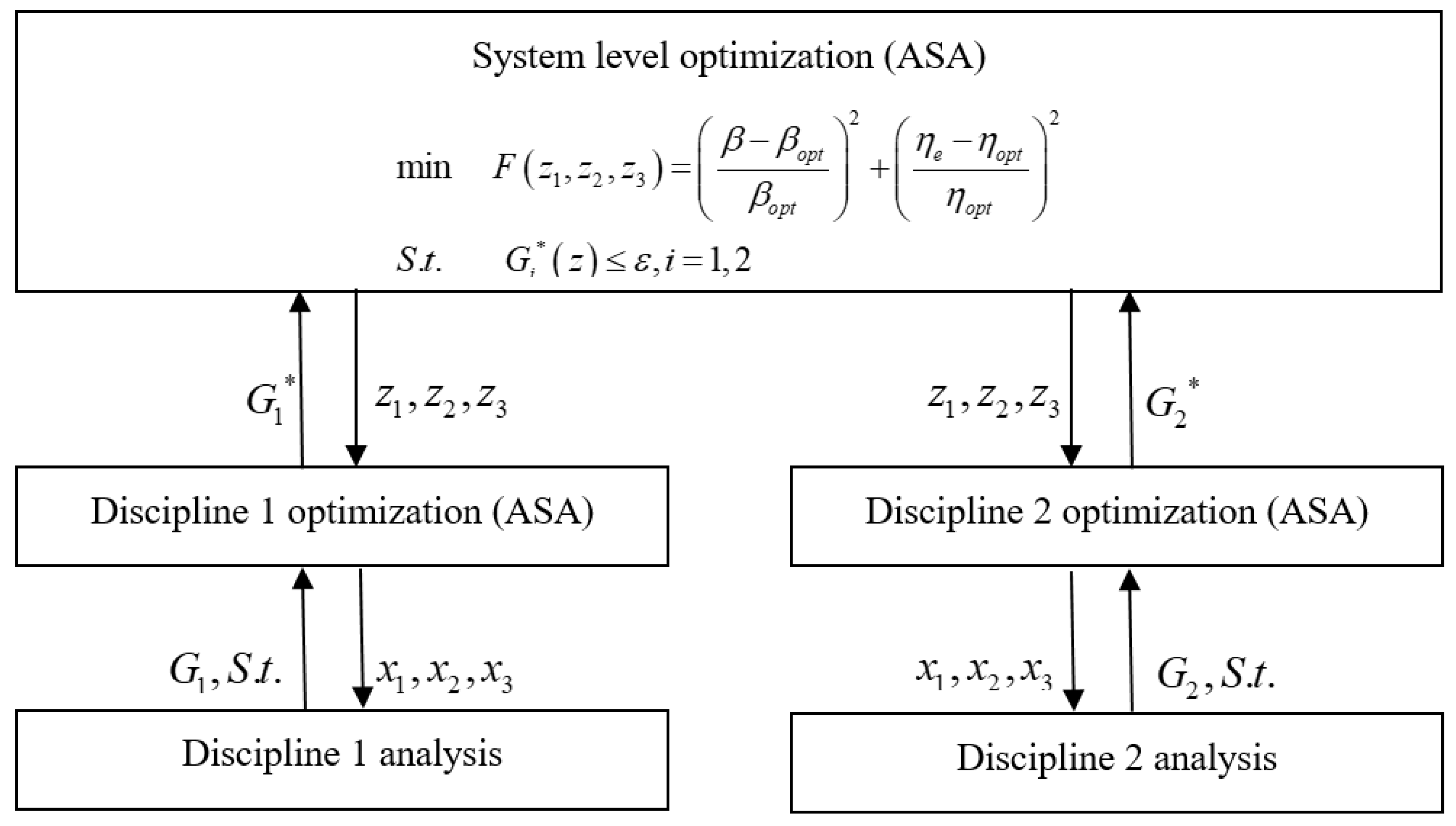
As evidenced in the literature survey, several problems exist, such as complex structures, too many control parameters, and inconsistent braking response, because current braking systems comprise two independent systems, the regenerative and friction braking systems. It is difficult to maintain good regenerative braking efficiency and regenerative braking effectiveness stability because it is necessary to switch between the regenerative braking system and the friction braking system during braking. Moreover, a strong coupling relationship exists between the regenerative system and the friction braking system. Obtaining a good comprehensive braking performance using conventional optimization methods is difficult. To solve these problems, first, the mathematical model of the novel regenerative–mechanical coupled brake-by-wire system is presented herein to reveal the coupled braking mechanism. Next, two disciplines, namely the optimum braking stability and the maximum regenerative energy recovery efficiency, are defined to optimize the comprehensive braking performance of the vehicle. The optimization results are obtained using a collaborative optimization algorithm. Thereafter, a network is built based on the optimization results and the sample points comprising the vehicle speed v, battery state-of-charge (SoC), and braking severity z. Afterwards, through supervised learning, the in-depth characteristics of the sample points and the optimization results are obtained based on the deep learning network to establish the deep learning control algorithm. Finally, the deep learning control algorithm is verified to have higher control precision than conventional methods and a better real-time performance than online optimization in a dynamic simulation.
This paper is organized as follows:
Section 2 describes the mechanism of the novel regenerative–mechanical coupled brake-by-wire system;
Section 3 presents a mathematical optimization model and describes the multidisciplinary design optimization (MDO) method for optimizing the control parameters of the novel regenerative–mechanical coupled brake-by-wire system;
Section 4 presents a deep learning control algorithm based on the optimization results and sample points obtained using a deep learning network, and
Section 5 presents the simulations, followed by the concluding remarks in the final section.
2. Novel Regenerative–Mechanical Coupled Brake-by-Wire System
2.1. Structure of the Novel Regenerative–Mechanical Coupled Brake-by-Wire System
The novel regenerative–mechanical coupled brake-by-wire system, which takes advantage of brake-by-wire and regenerative braking [
20,
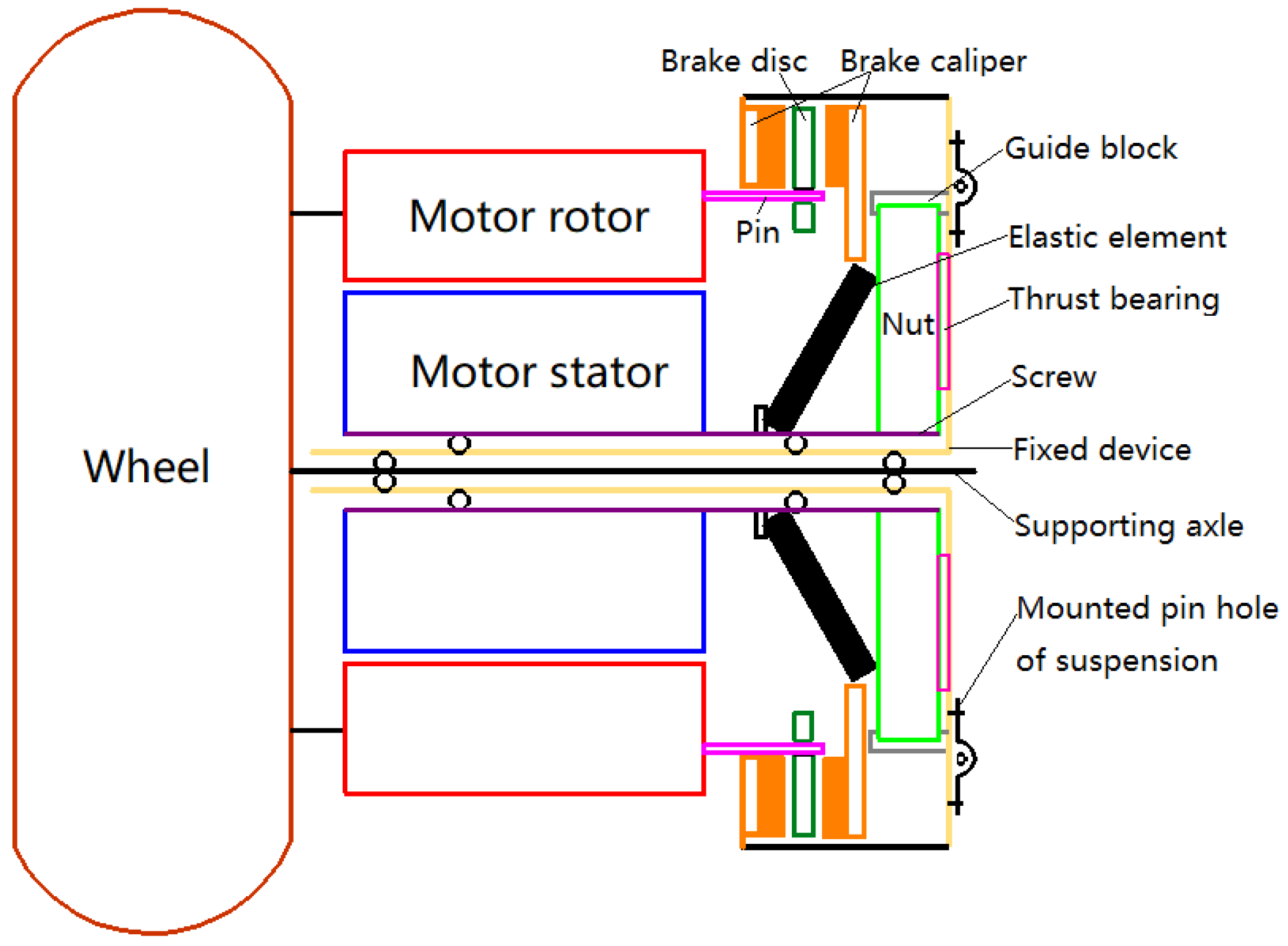
21], is built based on the mechanism of mechanical-electrical-magnetic energy conversion (
Figure 1).
As shown in
Figure 1, during braking, the in-wheel motors equipped on the front and rear wheels perform regenerative braking and recover kinetic energy into the battery. The transmission path of the regenerative braking torque is as follows: motor stator
motor rotor
wheel.
The screw is fixed on the motor stator; hence, when the electromagnetic torque generated by the motor stator is transmitted to the screw, the motive force of friction braking will be converted to generative friction braking torque. The transmission path of the regenerative braking torque is as follows: motor statorscrew and nutelastic elementbrake caliper and brake discmotor rotorwheel.
The electromagnetic torque generated by the feedback current performs braking in the novel regenerative–mechanical coupled brake-by-wire system. At the same time, the friction braking torque can be generated by the electromagnetic braking torque, which is the driving force for friction braking, without additional energy consumption. The coupled braking process involving regenerative braking and friction braking is then realized. Hence, the electromagnetic torque can be controlled to modulate the braking severity and maintain the optimum comprehensive performance in terms of energy recovery and braking stability through mechanical/electrical/magnetic MDO.
This study focuses on the normal deceleration process that has a braking severity ranging from 0 to 0.4 with enough adhesive force from the dry pavement. Considering the characteristics of both motor and battery, the vehicle speed is limited within 10 km/h to 100 km/h, and the battery SoC is a value in the range of 0.2–0.8.
2.2. Mathematical Model of the Novel Regenerative–Mechanical Coupled Brake-by-Wire System
During braking, the electromagnetic torque
between the motor rotor and the motor stator is generated by the feedback current
in the motor rotor coil under the effect of electromagnetic induction. The regenerative braking torque
is then generated by
in the brake wheels through the connection device. Neglecting the tube pressure drop of the feedback brake circuit and the motor self-friction torque in the steady state,
and
can be expressed as follows [
22]:
where
is the torque coefficient (Nm/A).
As shown in
Figure 1, the screw cannot slide, but can only rotate along with the motor stator. The nut cannot rotate, but can only slide along with the guide block. The screw and the nut are joined by a non-locking spiral. The screw is fixed to the motor stator; hence, the thrust force
can be generated by the electromagnetic torque through the transmission mechanism.
can be expressed as follows [
23]:
where
is the mechanical efficiency of the transmission mechanism;
is the friction radius of the screw end plane (m);
is the lead angle of the screw (rad); and
is the equivalent friction angle of the screw and the nut (rad).
When
overcomes the elastic force
of the elastic element, the friction braking torque will be generated by the brake caliper in the clamping brake disc and transmitted to the brake wheels through the motor rotor and connection device. The friction braking torque
is then described as follows:
where
,
is the transmission ratio of the transmission mechanism;
is the friction coefficient of the brake disc, and
is the radius of the brake pressure (m).
Therefore,
can be generated by
in the novel regenerative–mechanical coupled brake-by-wire system, and
can be coupled with
to the brake wheels. The total braking torque
can then be described as follows:
As Equations (1)–(4) show, compared to the current braking systems that comprise two independent systems, namely the regenerative and friction braking systems, the novel regenerative–mechanical coupled brake-by-wire system can realize optimal dynamic matching between the regenerative torque and the friction torque and a brake-by-wire coupling of regenerative braking and friction braking. The integration of the entire braking system is considerably improved, and its structure is simplified.
2.3. Braking Torque Distribution Strategy
The research object is a distributed four-wheel-drive EV. Based on longitudinal braking dynamics in straight-line travel, the braking force provided by the ground, regenerative braking torque, and friction braking torque on the left and right wheels of the front axle are equal, and so are the torques on the left and right wheels of the rear axle.
The torques of each wheel can be expressed as follows:
where
and
are the regenerative braking torques on the left wheel of the front and rear axles, respectively (Nm);
is the total regenerative braking torque (Nm);
and
are the friction braking torques on the left wheel of the front and rear axles, respectively (Nm);
is the total friction braking torque (Nm);
and
are the tire-ground braking forces on the left wheel of the front and rear axles, respectively (N);
is the effective tire radius (m);
is the total braking torque (Nm);
is the kerb mass (kg);
is the acceleration caused by gravity (m/s
2), and
is the braking severity.
The braking torque distribution strategy aiming at an optimal overall performance in terms of the braking stability and the regenerative braking energy recovery rate is proposed for a novel regenerative–mechanical coupled brake-by-wire system. The strategy can be described as follows:
First, the proportion of the total regenerative braking torque in the overall braking torque is determined as follows:
where
is the distribution coefficient of the regenerative braking torque.
Second, the proportion of the regenerative braking torque between the front and rear axles is determined as follows:
where
is the distribution coefficient of the regenerative braking torque on the front axle.
Third, the proportion of the friction braking torque between the front and rear axles is determined as follows:
where
is the distribution coefficient of the friction braking torque on the front axle.
Combining Equations (5)–(8) gives the following:
The braking force distribution coefficient
is defined as follows:
4. Deep Learning Control Algorithm
In the design space consisting of the vehicle speed
v, battery
SoC, and braking severity
z, each parameter in the sample points has a large changing range, and a strong nonlinearity exists between the optimization results and the corresponding sample points. Therefore, compared to conventional methods, such as the response surface, neural network, and Kriging, the deep learning method is more suitable for the development of a vehicle braking control algorithm [
29] based on the novel regenerative–mechanical coupled brake-by-wire system. By building a network model with multiple hidden layers, the in-depth characteristics of the optimization results and the corresponding sample points are analyzed through deep learning. Hence, the deep learning control algorithm can be obtained based on the in-depth characteristics.
Aiming at the novel regenerative–mechanical coupled brake-by-wire system, a deep learning network with an input layer, an output layer, and three hidden layers was built with the design of experiment sample points treated as input parameters and the optimization variables treated as output parameters. Each hidden layer had 10 nodes. The input and output layers had three nodes. Through bottom-to-top supervised learning, the multiple-layer characteristics of the input data will be represented in the form of weight values. The input parameters (
v,
z, and
SoC) were then forward-propagated to build the deep learning control algorithm. The optimization parameters
,
, and
were calculated based on the deep learning control algorithm, and can be expressed as follows:
where
is the
weight matrix;
–
are the
weight matrices;
is the
weight matrix;
–
are the
bias matrices, and
is the
bias matrix.
Combining Equations (1)–(8) based on the optimization variables
,
, and
,
,
,
, and
can be expressed as follows:
where
and
are the braking currents on the left novel regenerative–mechanical coupled brake-by-wire system of the front and rear axles, respectively (A); and
and
are the elastic forces of the elastic element on the left novel regenerative–mechanical coupled brake-by-wire system of the front and rear axles, respectively (N).
5. Simulation Results and Discussion
A braking simulation of the vehicle, which had a novel regenerative–mechanical coupled brake-by-wire system, was realized under different braking conditions using the MATLAB®/Simulink® (the Mathworks Co., VersionR2013b, Natick, MA, USA) software program to verify the deep learning control algorithm.
The simulation conditions were set to (
vinitial = 60 km/h,
SoCinitial = 0.5), (
vinitial = 60 km/h,
SoCinitial = 0.7), (
vinitial = 40 km/h,
SoCinitial = 0.5), and (
vinitial = 40 km/h,
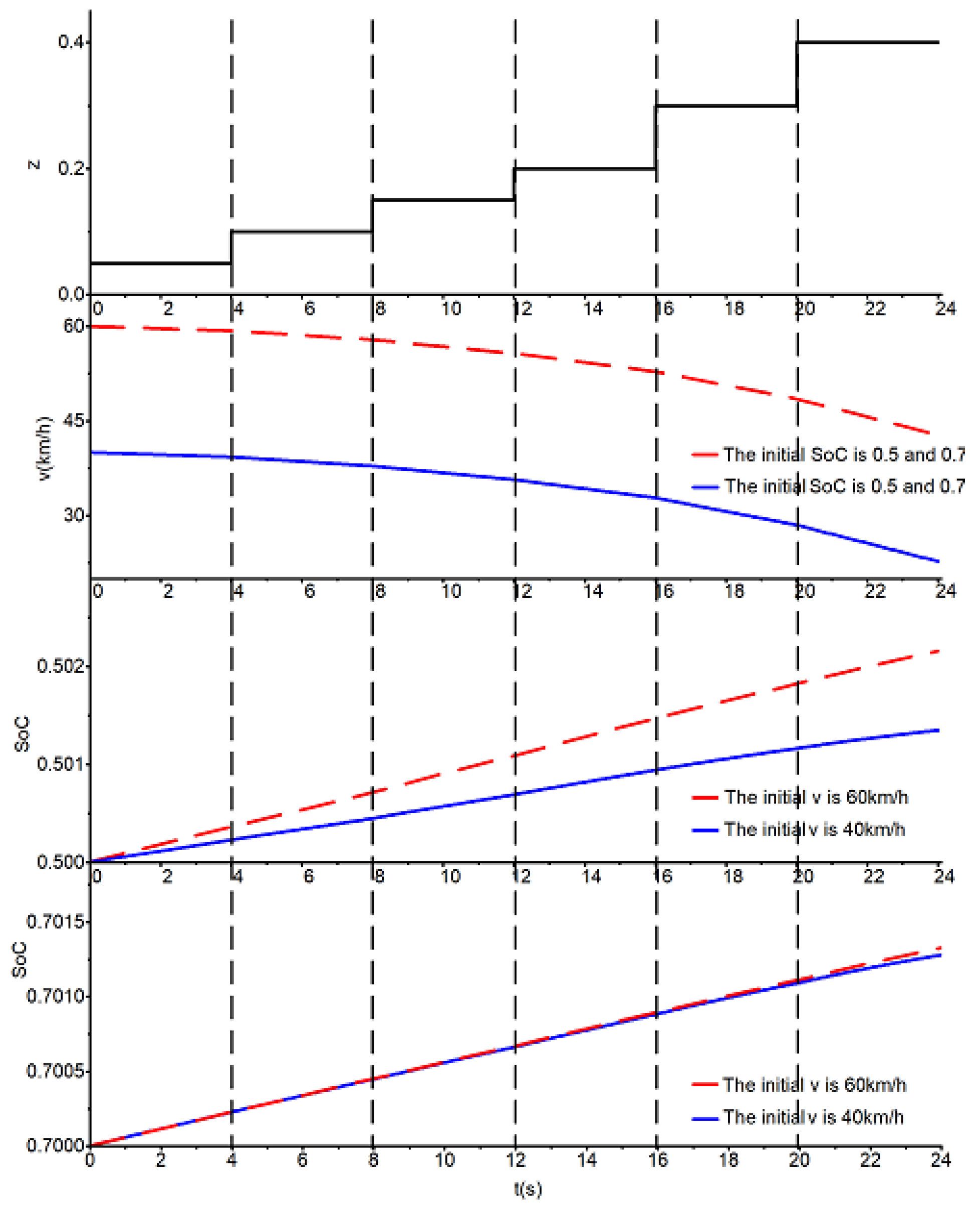
SoCinitial = 0.7) based on the common driving conditions of the target vehicle to compare the control parameters under different working conditions. The simulation process consisted of six braking processes. Each braking process had different braking severities of 0.05, 0.1, 0.15, 0.2, 0.3, and 0.4 (
Figure 3,
Figure 4,
Figure 5,
Figure 6 and
Figure 7).
Table 2 lists the simulation parameters.
With the change of the braking severity, the trend of the vehicle velocity and the battery
SoC are presented in
Figure 3. As
Figure 3 shows, during braking, the vehicle speed continuously decreases, and the battery
SoC continuously increases. Compared with high initial
SoC (
SoCinitial = 0.7), at low initial
SoC (
SoCinitial = 0.5), the ability of recover electric energy is better, and the vehicle can recover more electric energy with higher initial braking speed. Furthermore, at high initial
SoC, the initial braking speed has little effect on the regenerative braking energy recovery.
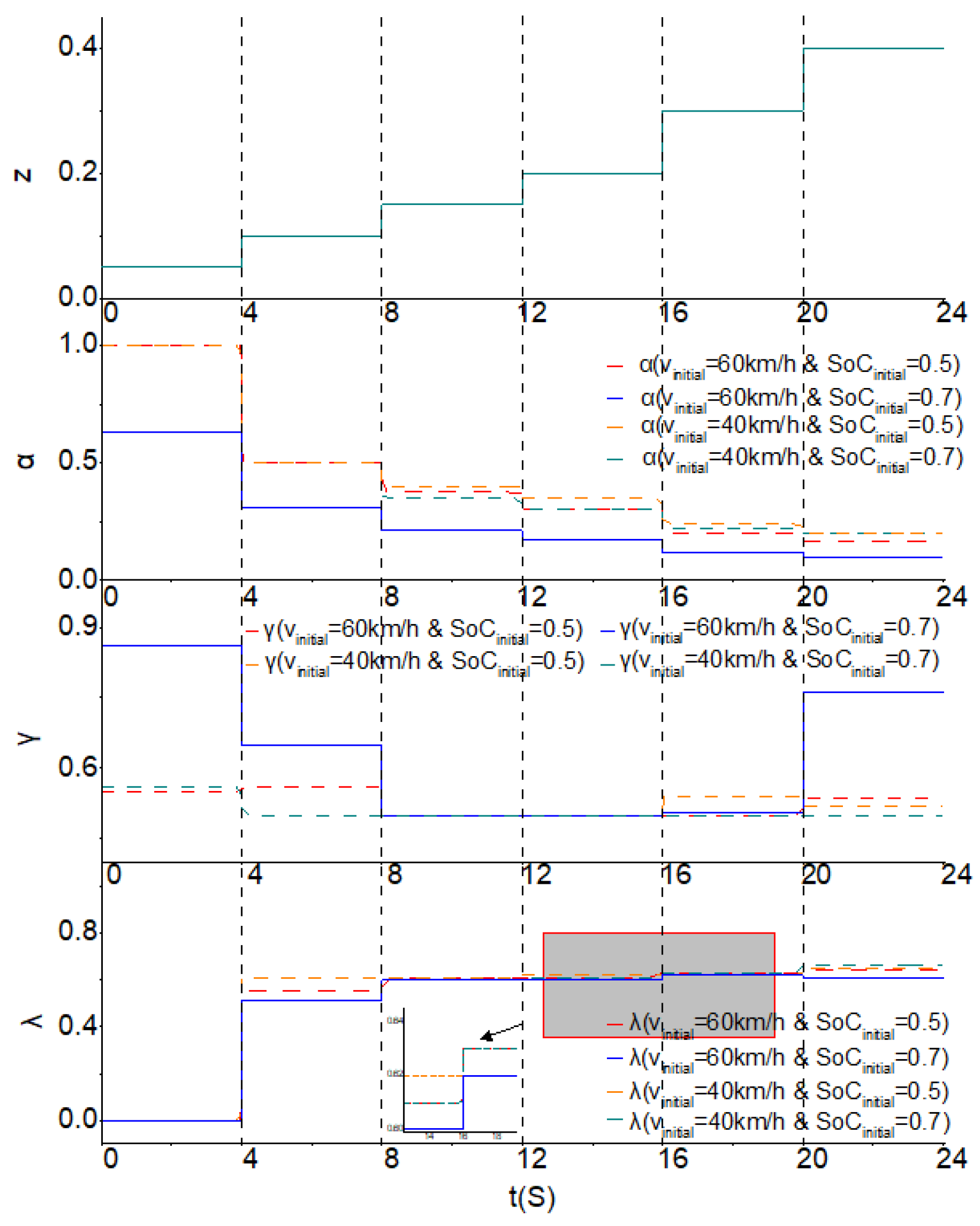
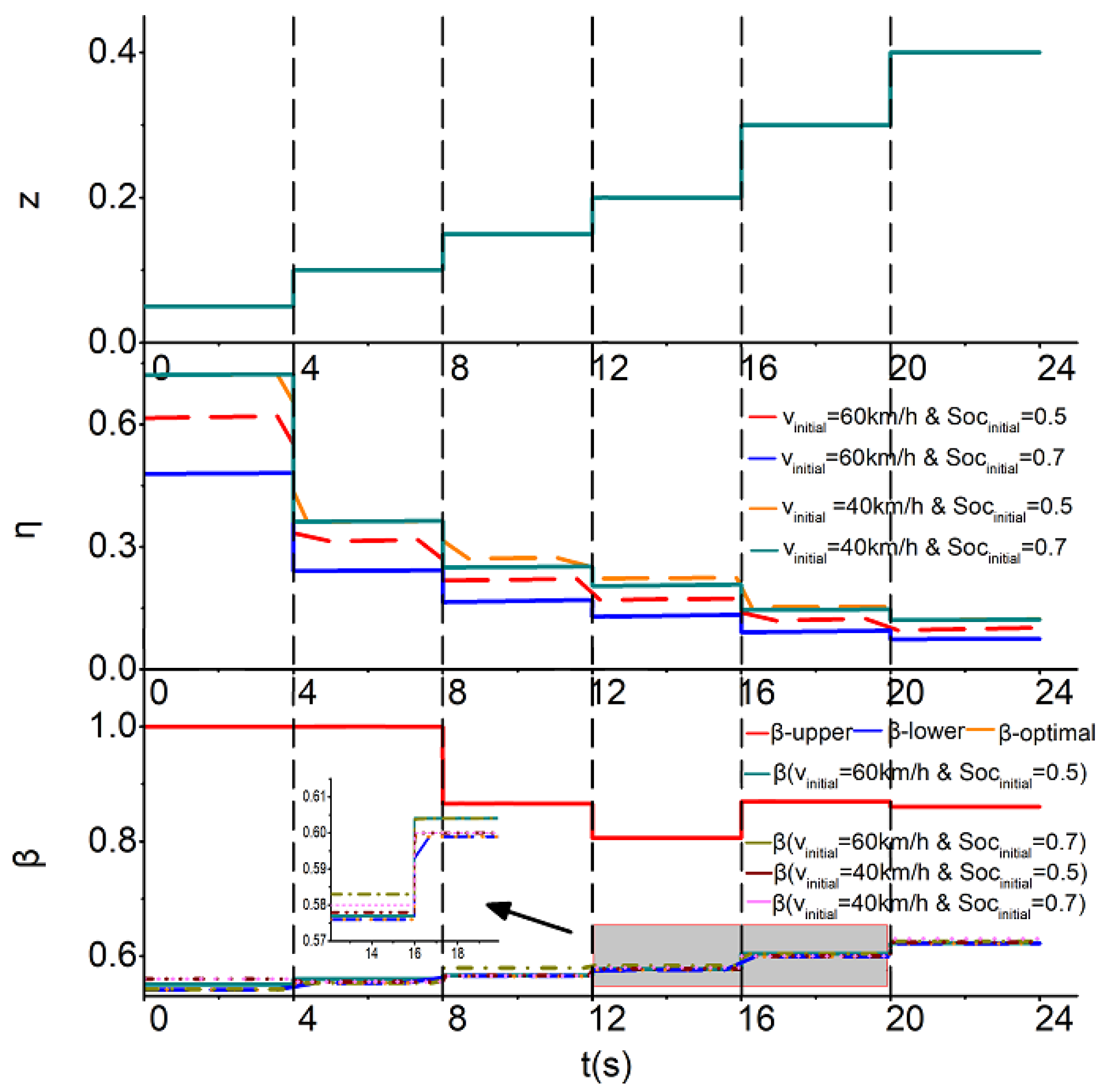
Figure 4 shows the trend of the optimization variables
,
, and
during braking. At high initial
SoC and high initial braking speed (
vinitial = 60 km/h), based on the characteristics of the in-wheel motor and the battery in the target vehicle, the proportion of the total regenerative braking torque in the overall braking torque is lower, and the proportion of the regenerative braking torque between the front axle and rear axles is higher. Moreover, under other conditions, these two proportions change only to a small extent. The vehicle speed and the
SoC have little effect on the proportion of the friction braking torque between the front and rear axles.
Figure 5 presents the braking energy recovery efficiency and the braking torque distribution.
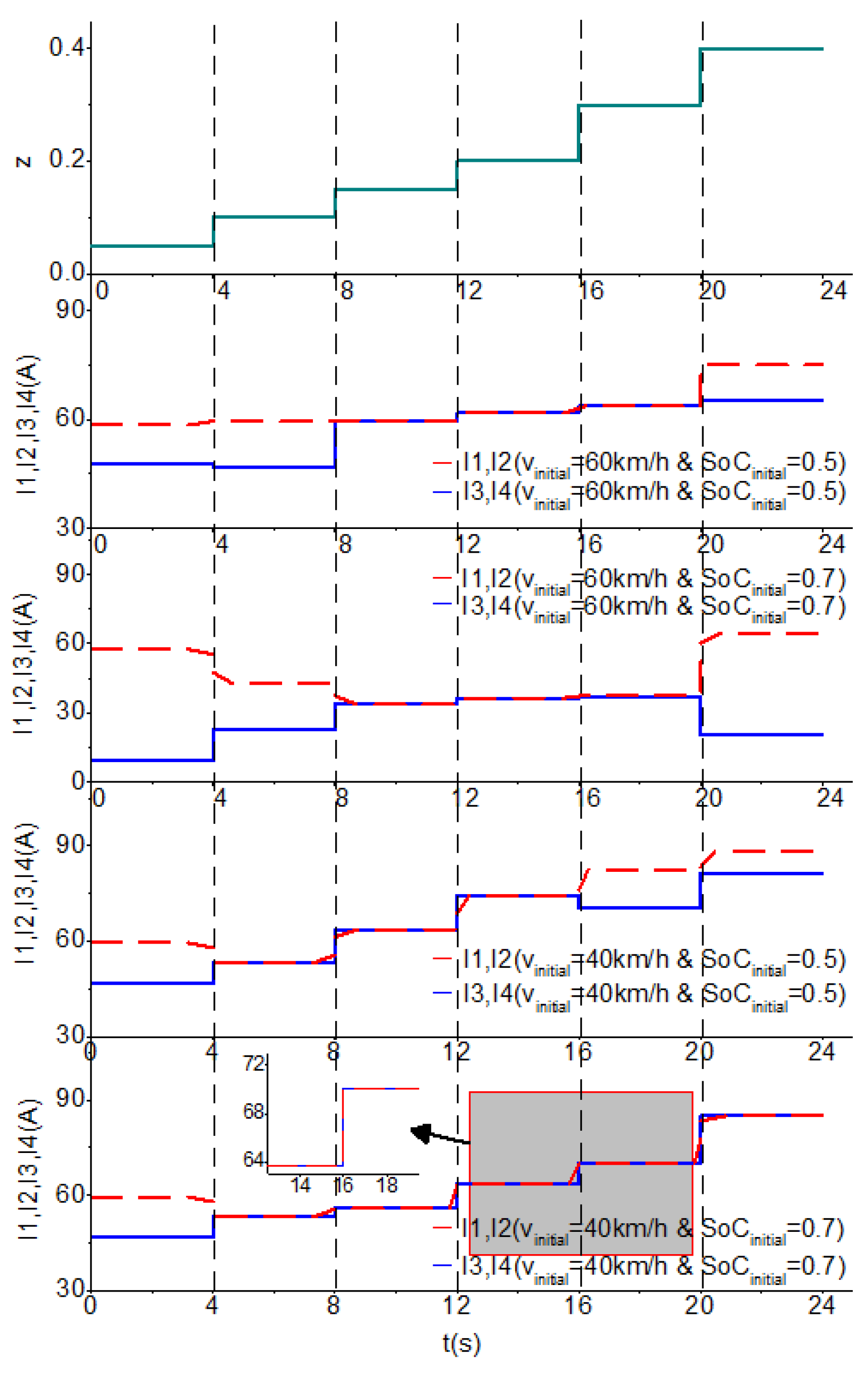
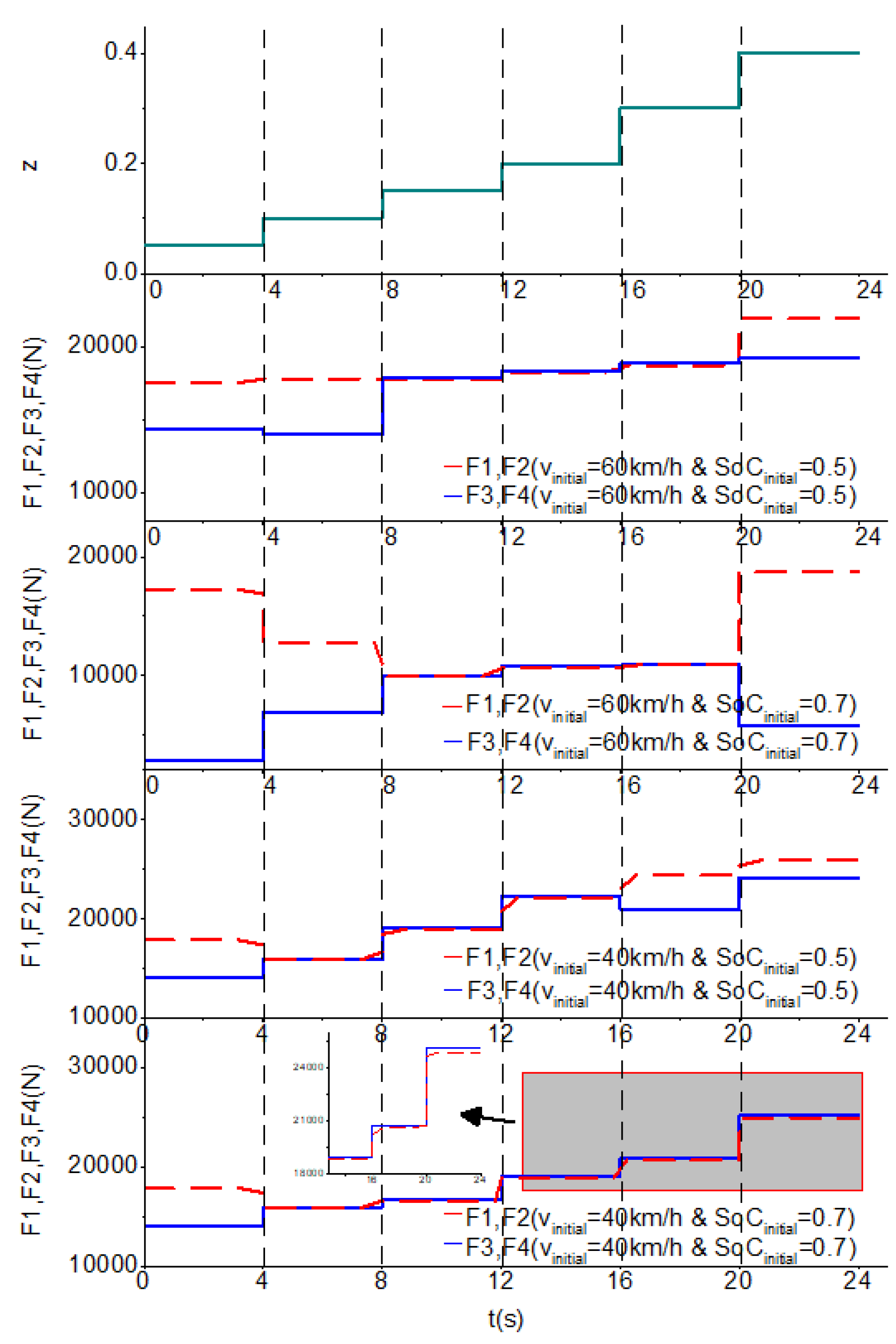
Figure 6 and
Figure 7 illustrate the control parameters
and
, respectively. As
Figure 5 shows, the change in the vehicle speed has an impact on the regenerative braking energy recovery efficiency. Based on the characteristics of the in-wheel motor and the battery in the target vehicle, it has a regenerative braking energy recovery efficiency higher than 60 km/h, when the vehicle initial braking speed reached 40 km/h. At the low initial
SoC, the vehicle has a higher regenerative braking energy recovery efficiency than the high initial
SoC. In the entire braking process, the braking force distribution coefficient is close to the optimum value in the specified range, and the vehicle has good braking stability.
Figure 6 and
Figure 7 show that based on the novel regenerative–mechanical coupled brake-by-wire system, the regenerative braking current of the motor and the elastic force of the elastic element can be realized through optimization variables
,
, and
.
As
Figure 3,
Figure 4,
Figure 5,
Figure 6 and
Figure 7 show, during braking, the vehicle speed continuously decreased, and the battery
SoC continuously increased. Compared to the current braking systems, in the novel regenerative–mechanical coupled brake-by-wire system, a dynamic matching between the regenerative braking torque and friction braking torque is realized by controlling the electromagnetic torque of the motor and the elastic force of the elastic element to maintain a high braking energy recovery efficiency and a good braking stability. The entire braking system has a higher integration and a simpler structure.
The required braking torque can be entirely provided by the regenerative braking torque when the braking severity is low (z = 0.05). At the same time, friction braking is not part of the braking process, and the vehicle had a high braking energy recovery efficiency. With an increasing braking severity, the regenerative braking torque cannot provide the required braking torque, and friction braking starts to occur. At this time, determining the control parameters that can maintain a good comprehensive braking performance using conventional optimization methods is difficult. However, based on the collaborative optimization algorithm, the target vehicle has a high energy recovery efficiency and a braking force distribution coefficient close to the optimum value in the specified range. Ultimately, during the entire braking process, the deep learning algorithm was developed based on the collaborative optimization algorithm. The deep learning algorithm was obviously superior to the conventional methods.
The multiple correlation coefficient (R2) was used to evaluate the accuracy of the control parameters obtained using the deep learning control algorithm. The R2 values of , , and were 0.9889, 0.9817, and 0.9912, respectively.
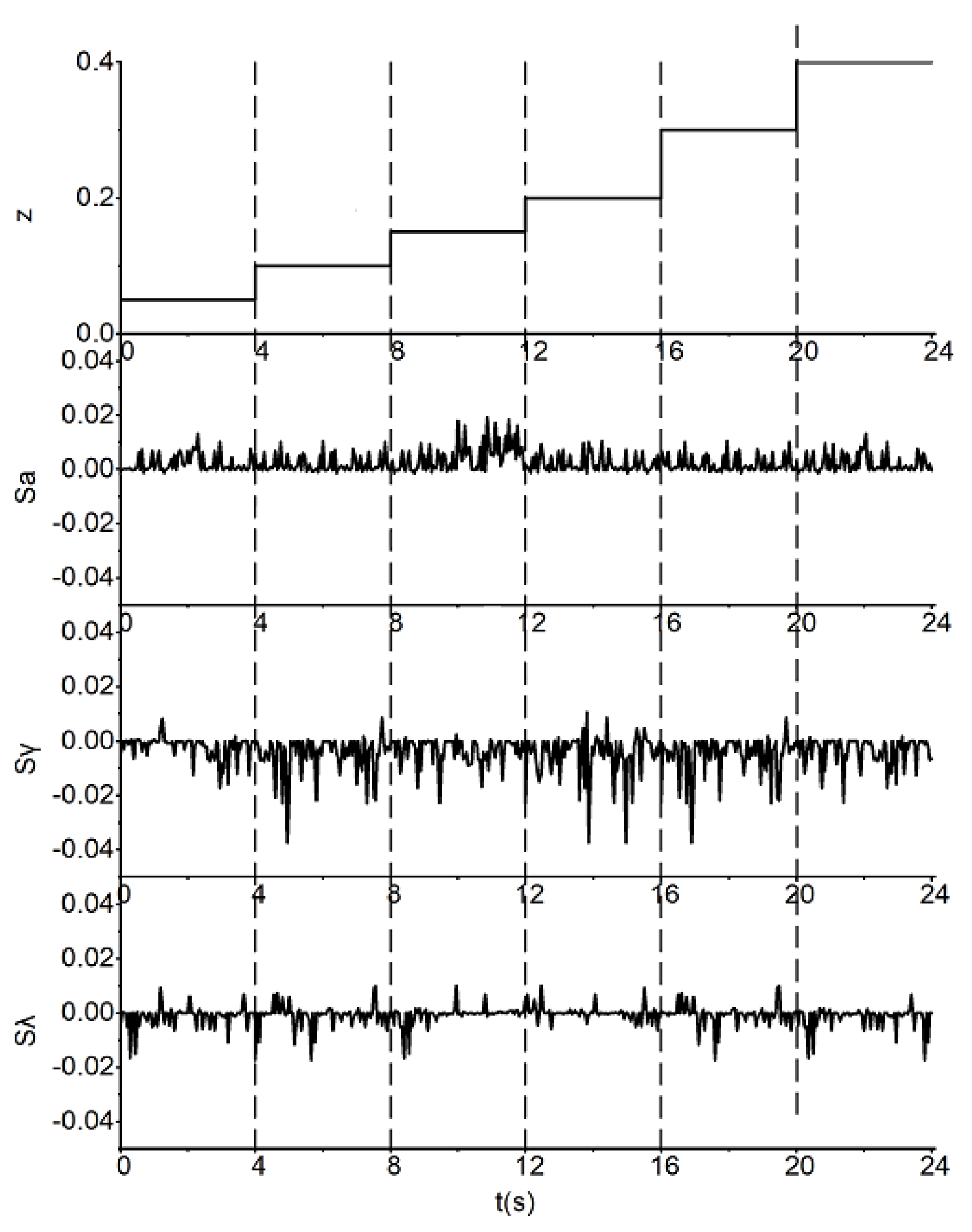
A relative error between the control parameters of the deep learning control algorithm and the online optimization values (
,
,
) is defined to better evaluate the effectiveness of the deep learning control algorithm:
where
,
, and
are the relative errors of
,
, and
, respectively.
Figure 8 shows that compared to conventional methods [
18,
19], a smaller relative error can be found between the control parameters of the deep learning control algorithm and the online optimization values. The maximum value of the relative error was only 3.89%, which was within the expected error by 5%. The online optimization simulation required 43.7 h. However, the simulation based on the deep learning control algorithm required 6.9 s. The deep learning control algorithm can solve the poor real-time performance problem of the online optimization.
Hence, the deep learning control algorithm has a higher control precision than the conventional methods and a better real-time performance than the online optimization.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}