Open- and Short-Circuit Fault Identification for a Boost dc/dc Converter in PV MPPT Systems

 , and
, and
Abstract
:1. Introduction
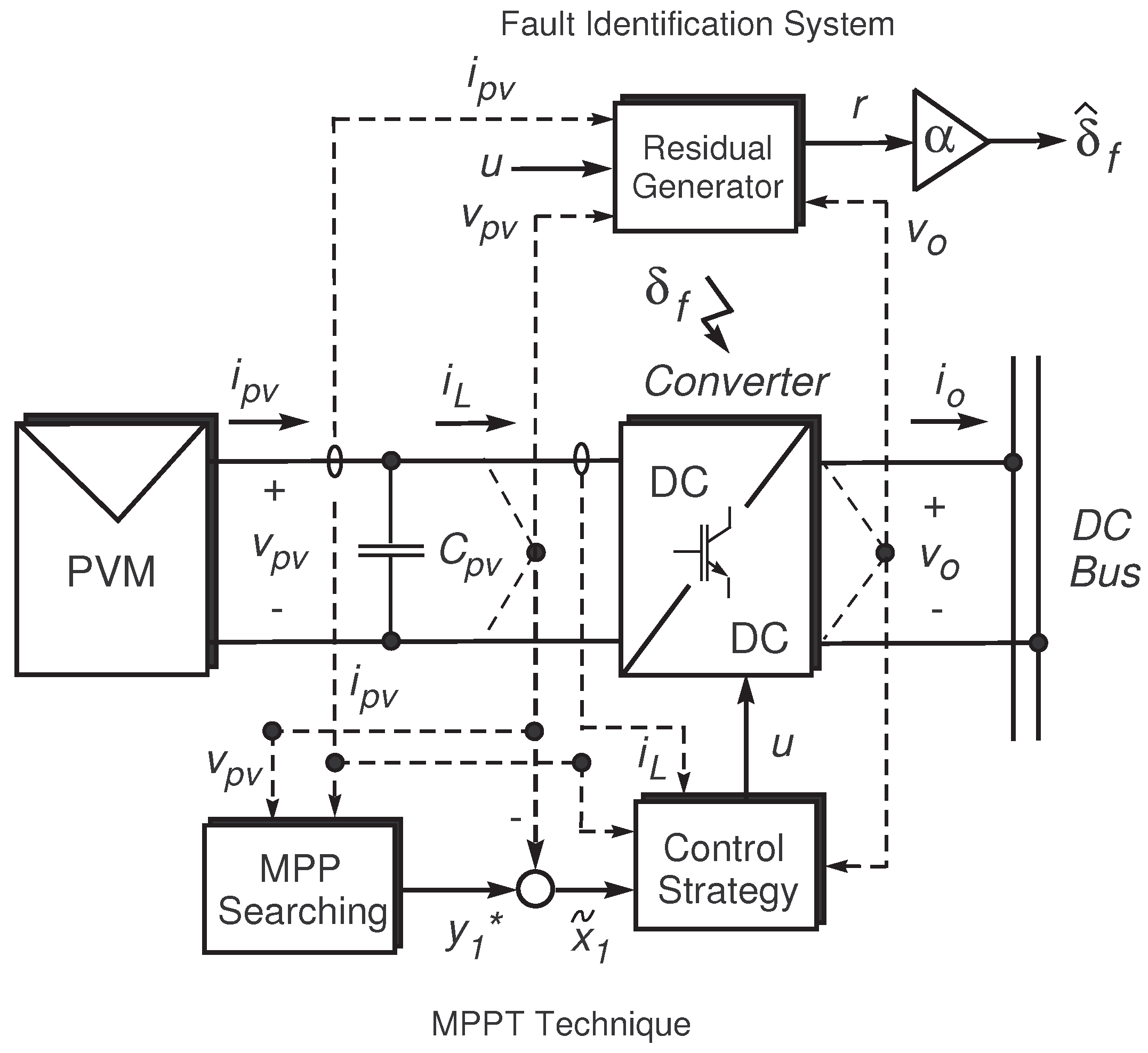
- An FI system operating under the influence of a closed-loop control system. In fact, the fault modeling is carried out by considering the nominal control algorithm.
- An FI system which requires only the information demanded by the control system, i.e., no extra sensors are needed in the FI stage.
- An FI system decoupled from the PV and load currents. Consequently, robust against varying irradiance conditions and disturbances in the load element.
- An experimental evaluation carried out by taking into account varying irradiance conditions.
2. Nominal MPPT Controller
3. Fault Modeling
- : Linearizing control law (Nominal duty cycle for the switch Q at steady-state).
- : Actuator switch fault of the switch Q at steady-state.
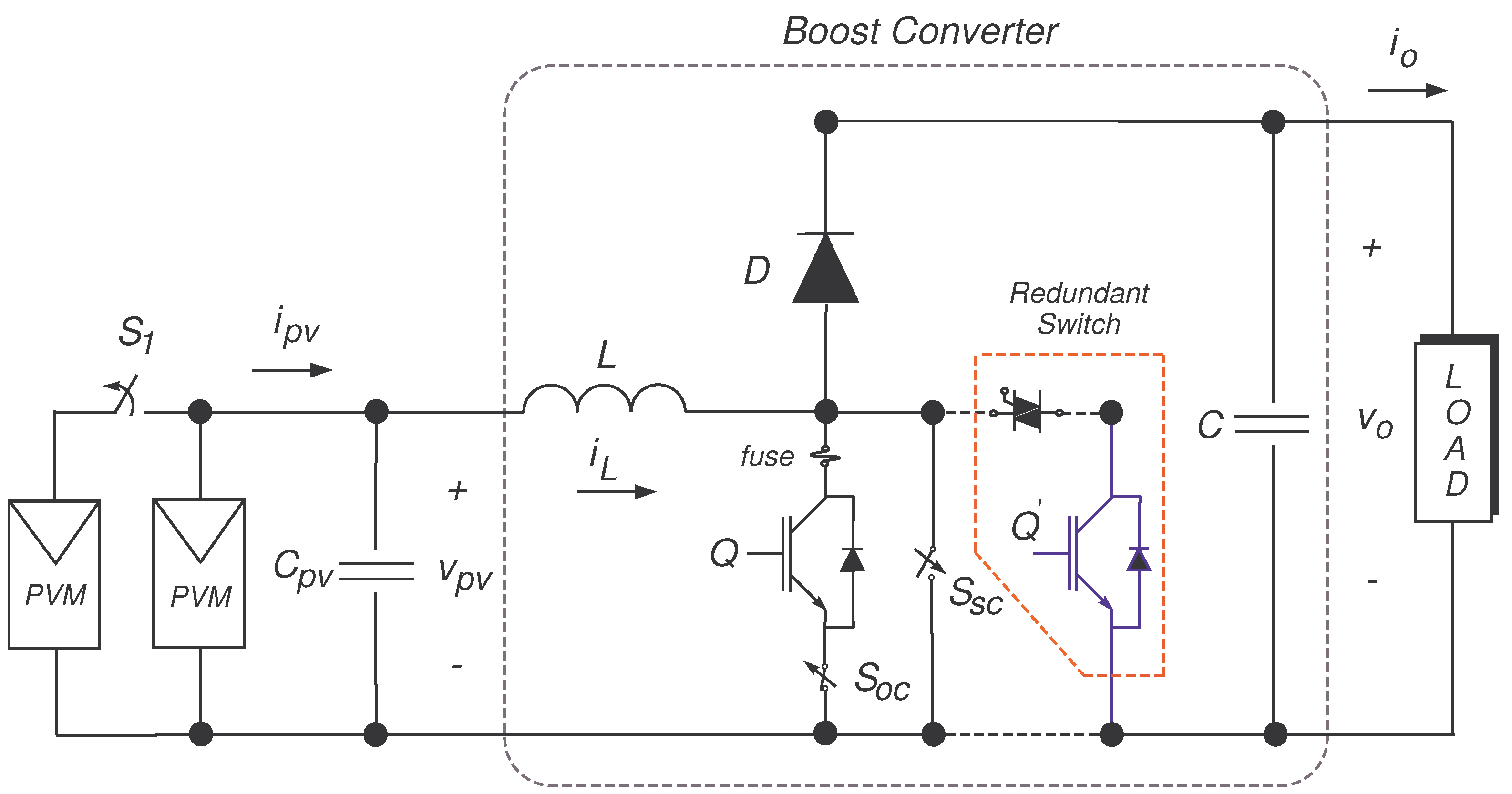
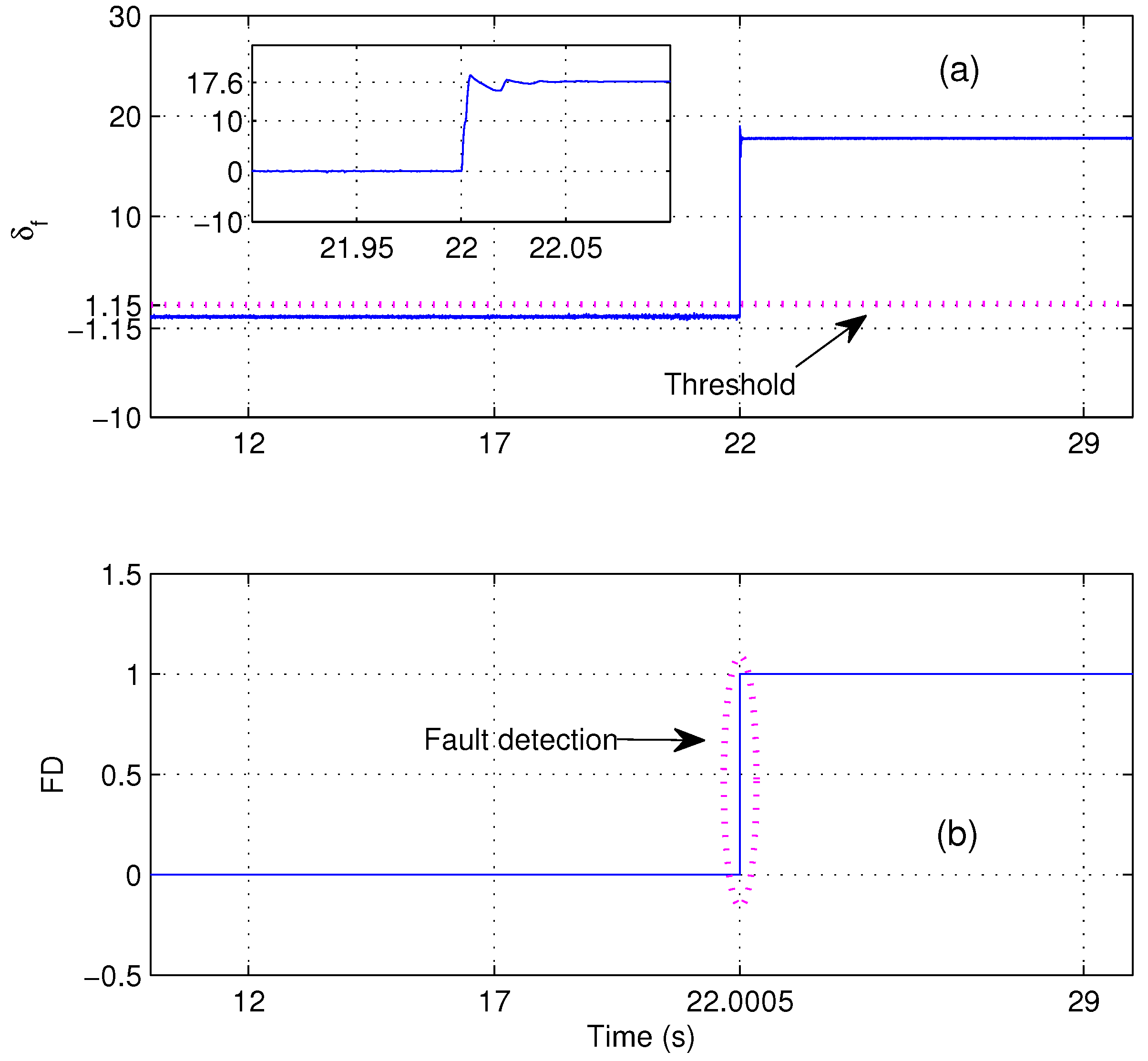
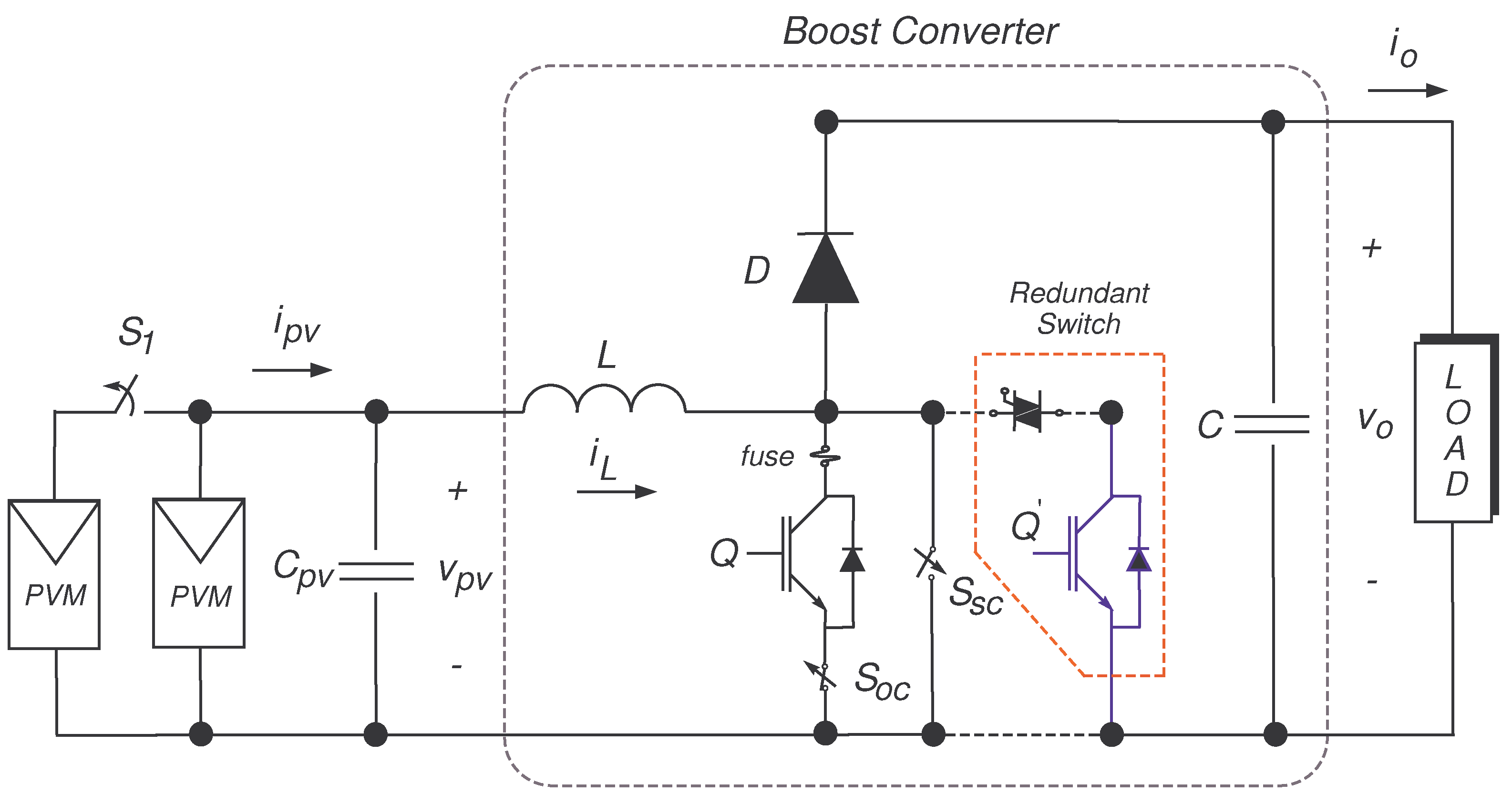
3.1. Open-Circuit Switch Fault Modeling
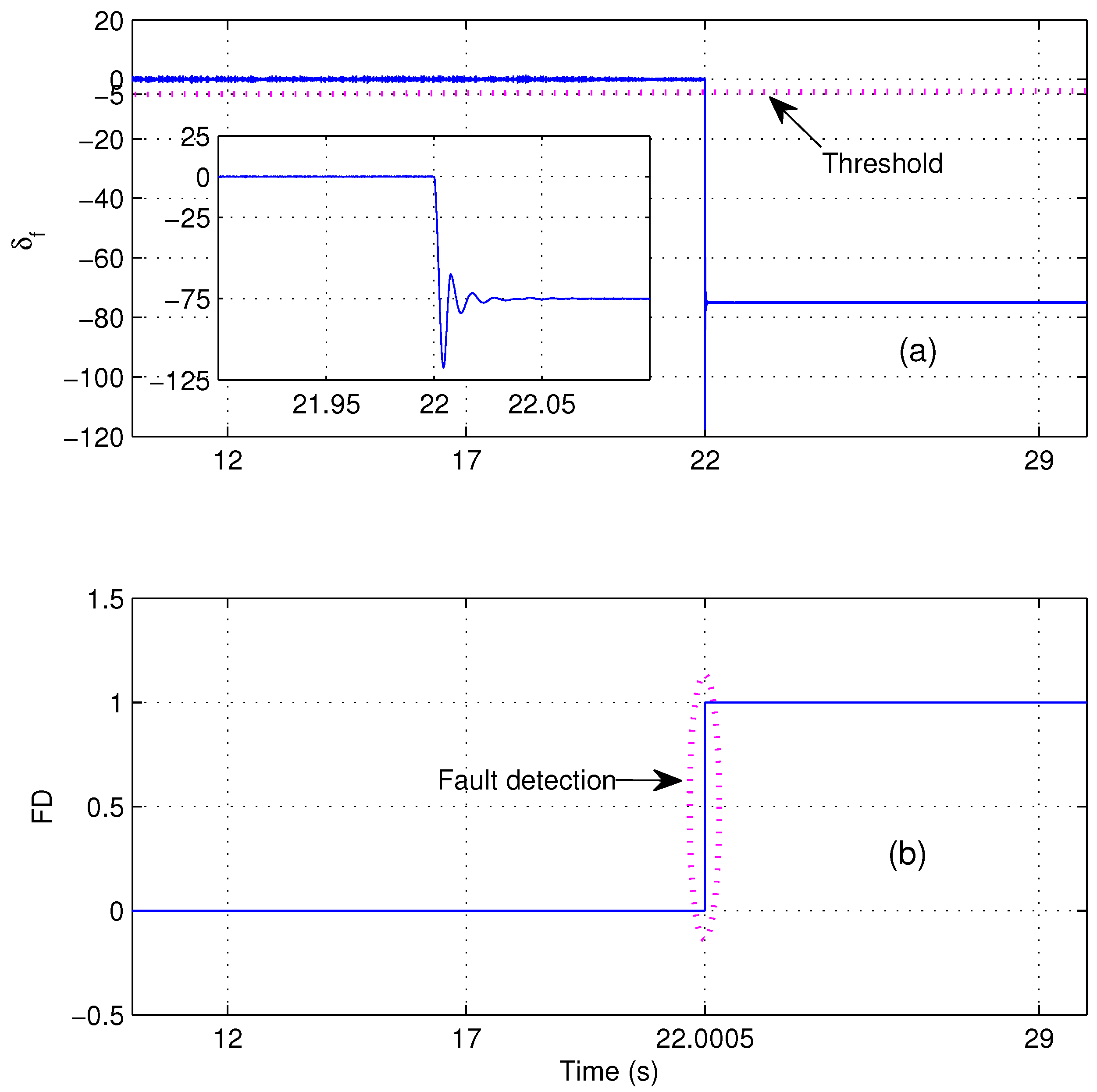
3.2. Short-Circuit Switch Fault Modeling
4. Observer-Based Fault Identification System
- A.1
- The pair is observable.
- A.2
- The PV current , the input voltage ( in the new coordinates) and the output voltage ( in the new coordinates) are available for measurement.
- A.3
- The duty cycle u is a signal available from the control algorithm.
- A.4
- The parameters L, C and are known and constants.
- A.5
- The output voltage is a piecewise constant signal.
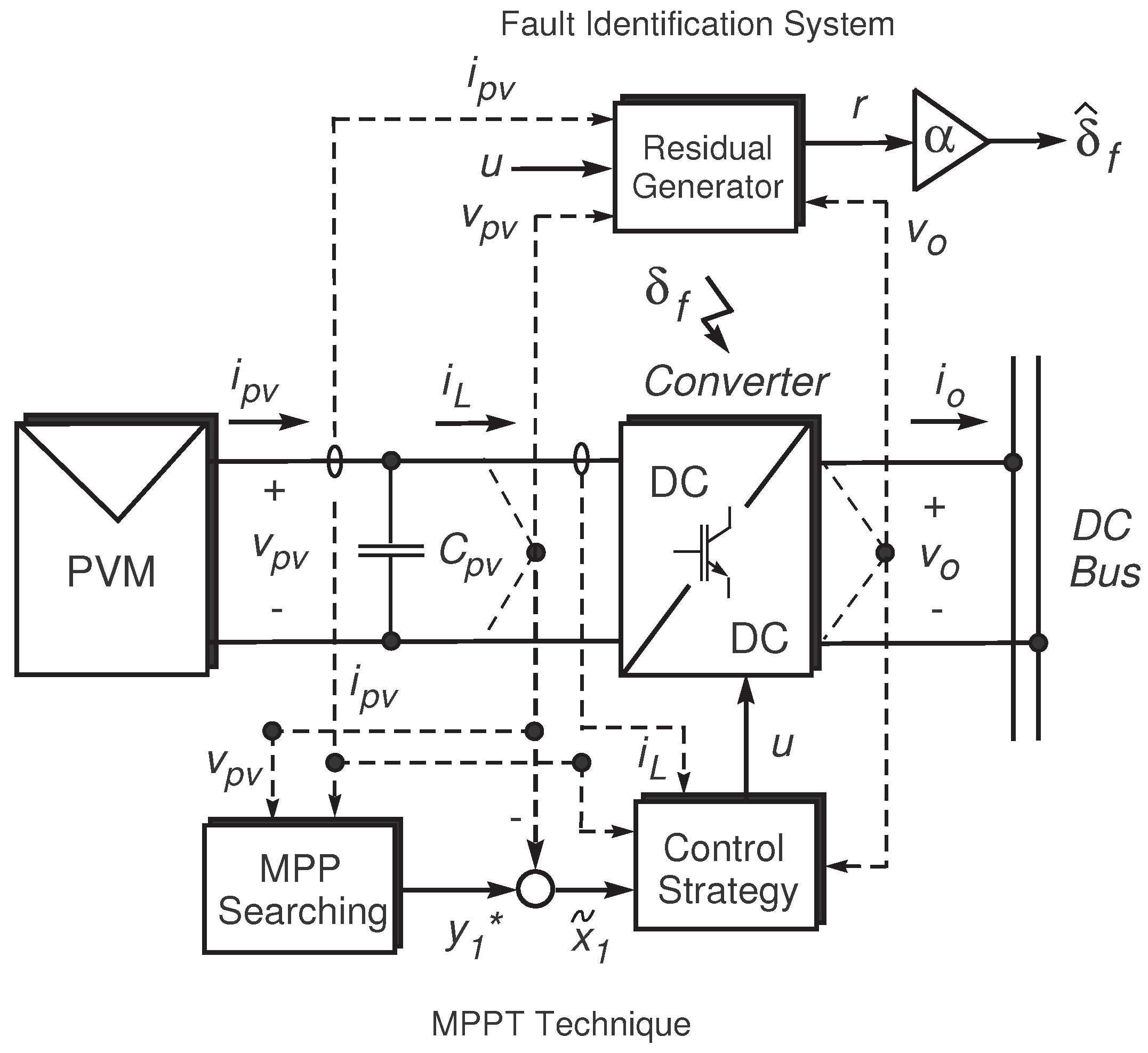
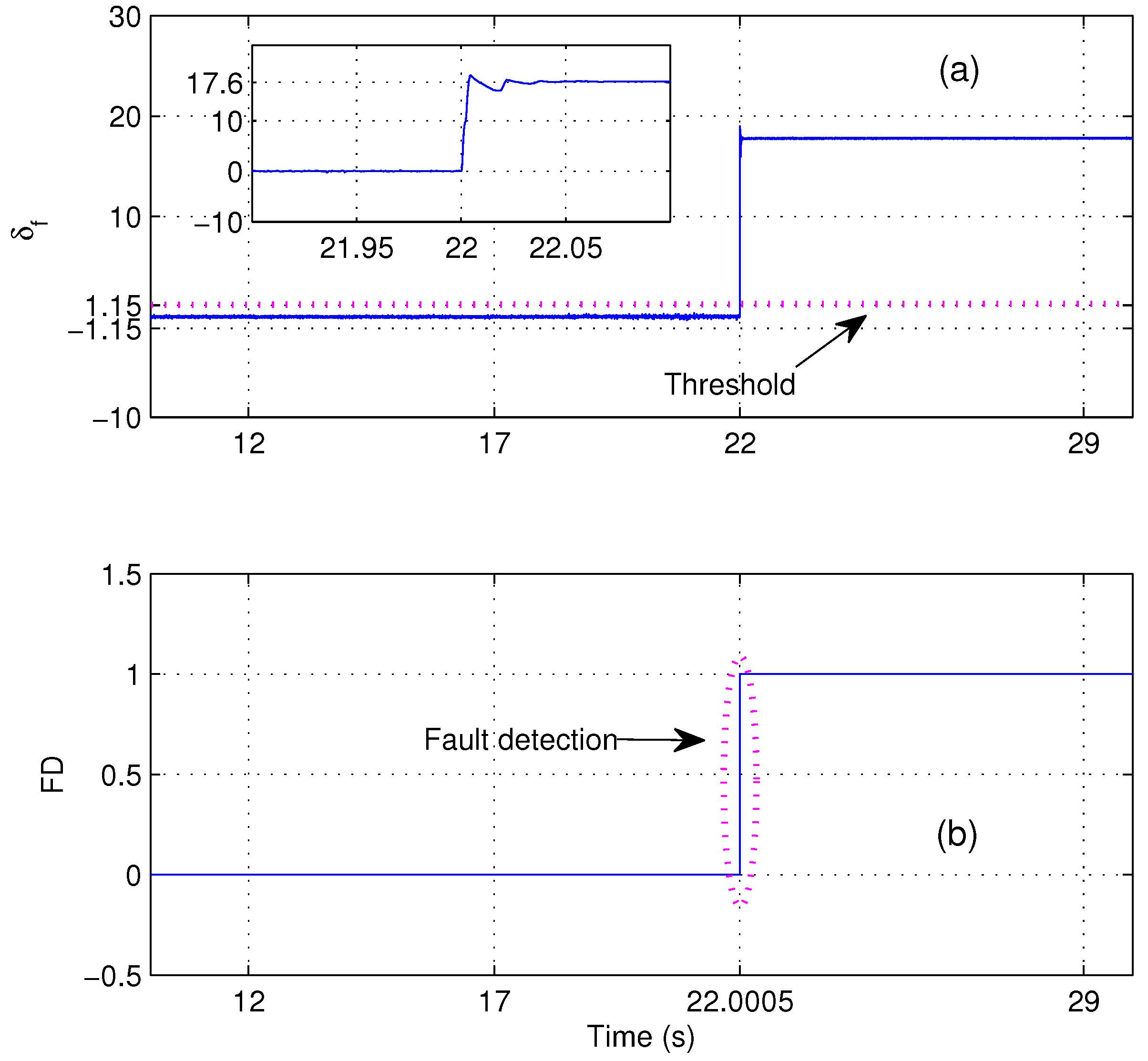
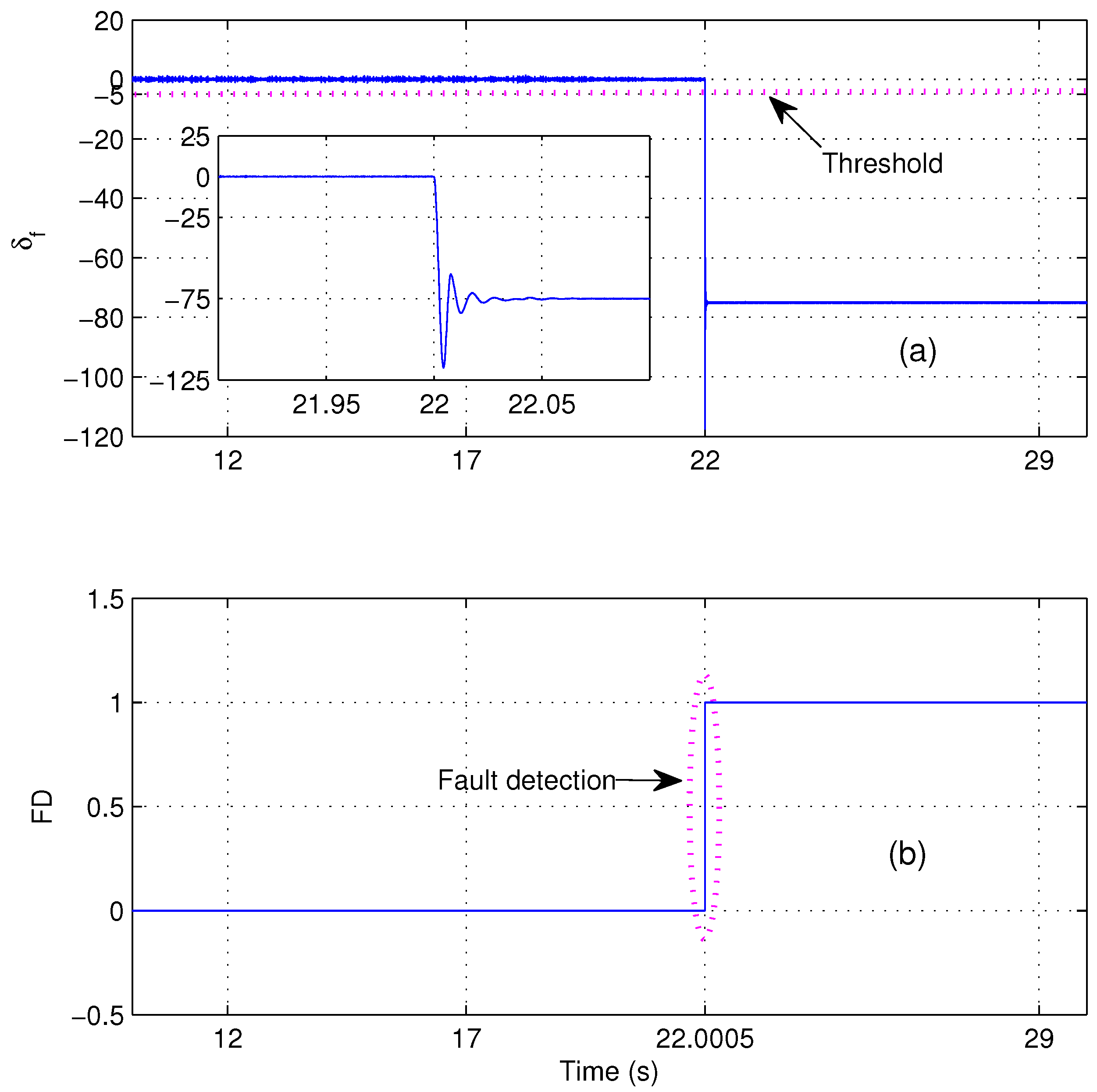
Fault Identification Stage
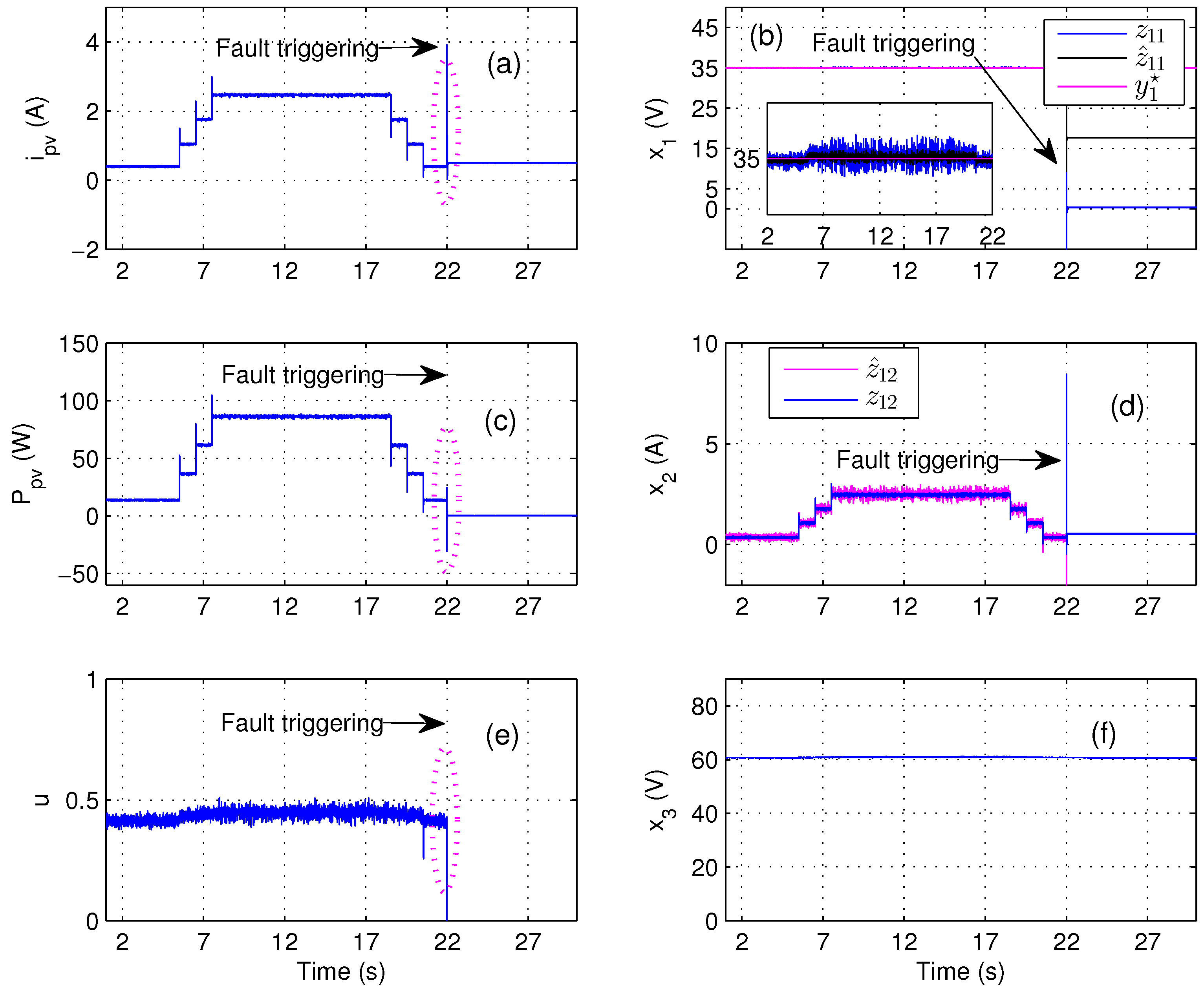
5. Experimental Validation
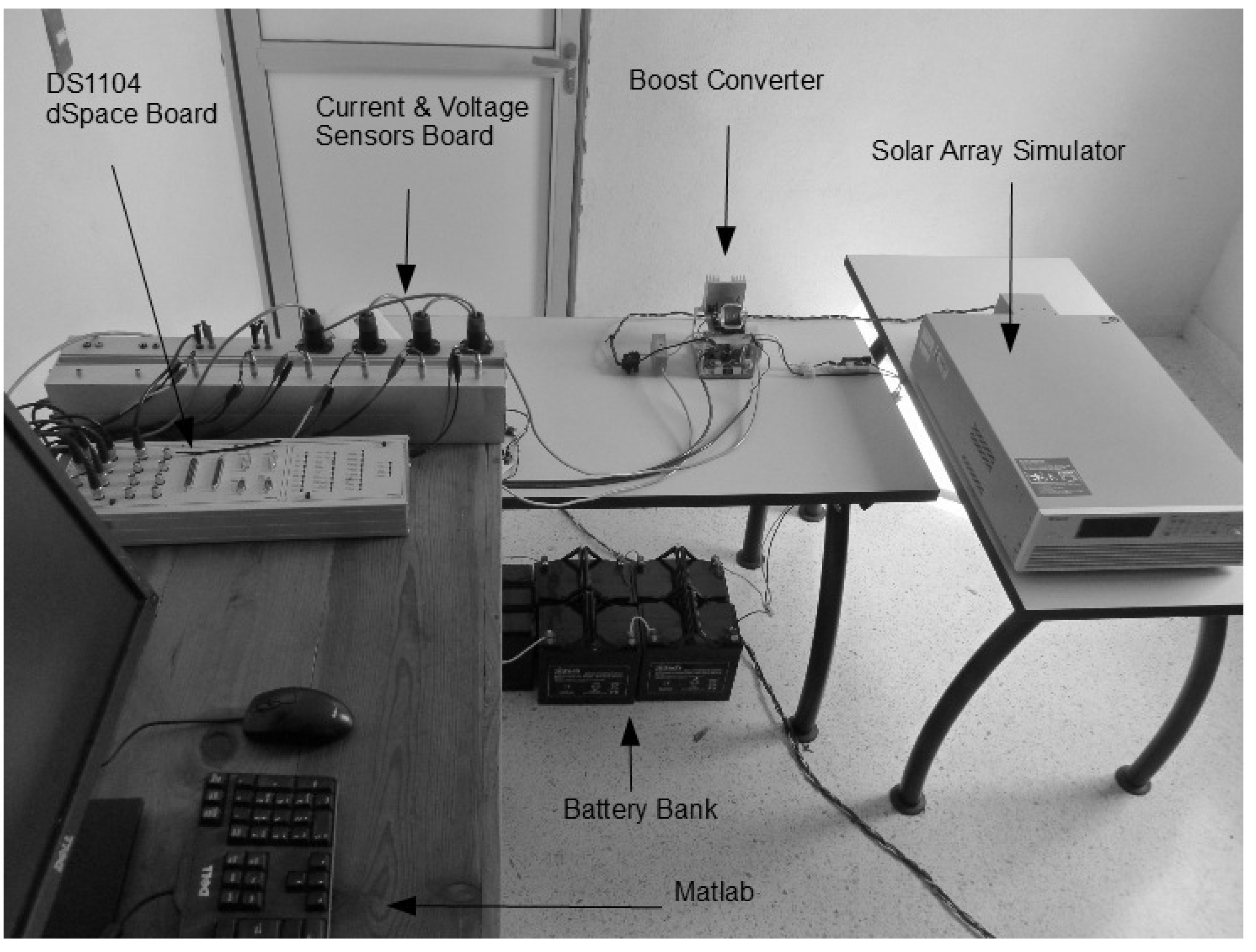
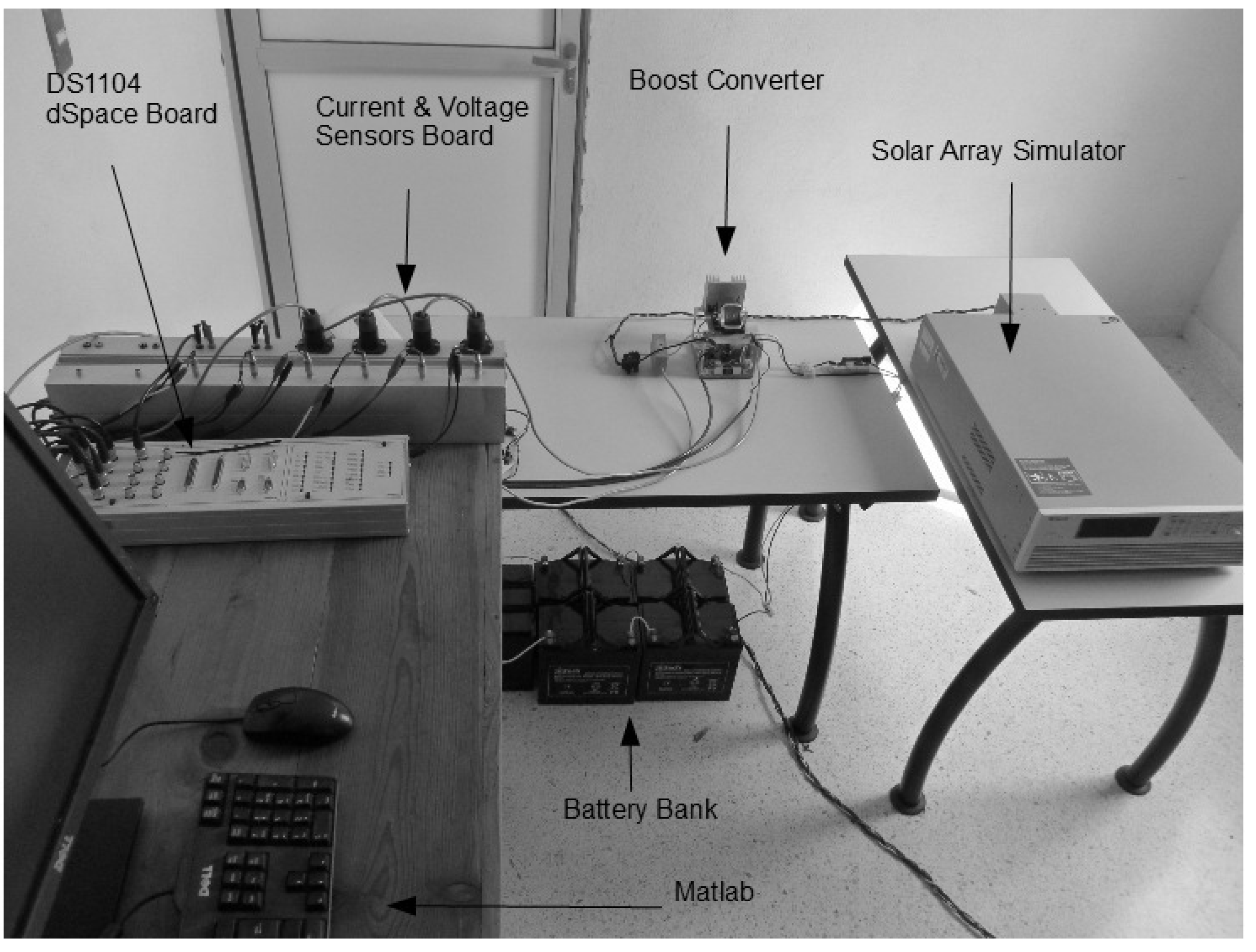
5.1. Testing Workbench
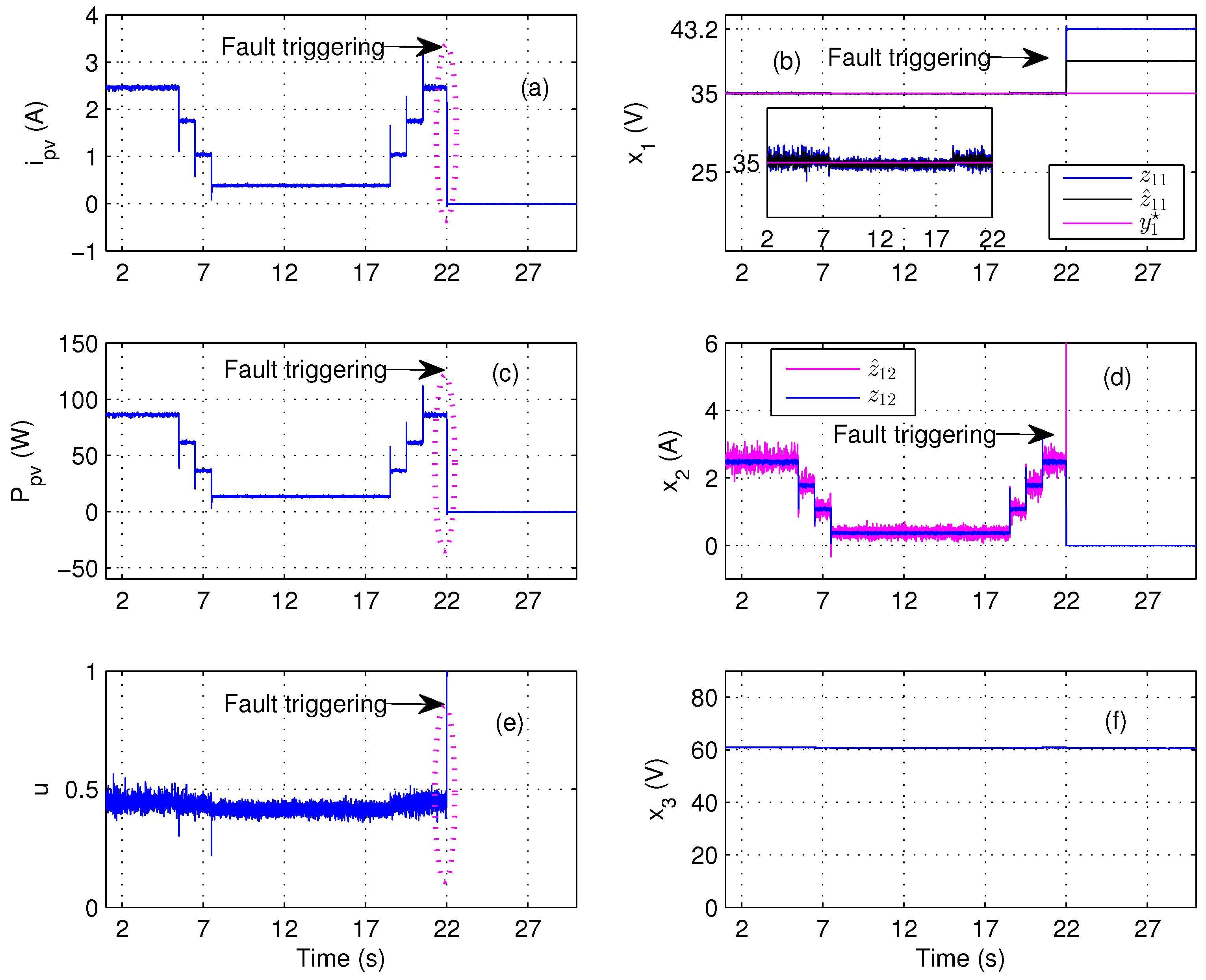
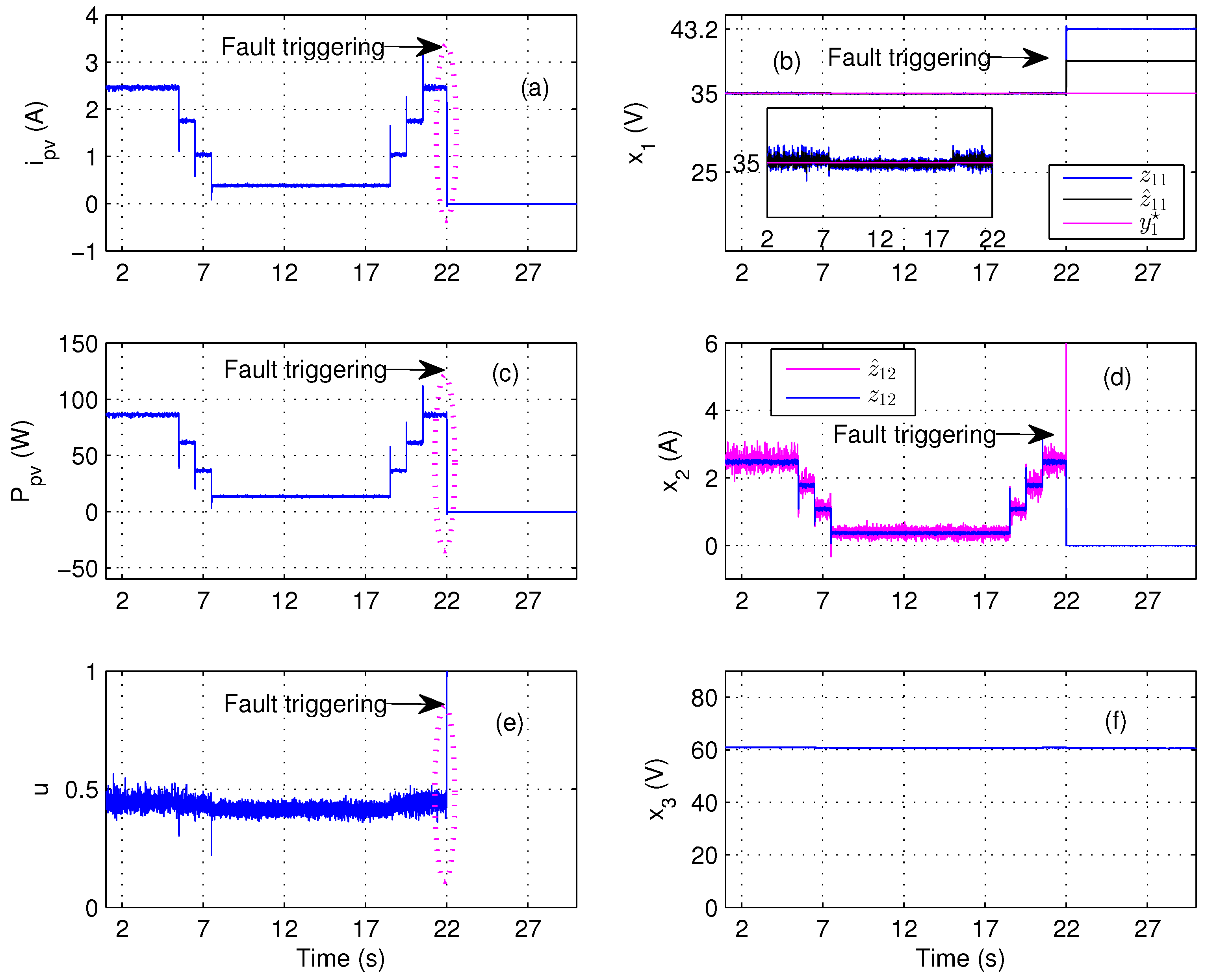
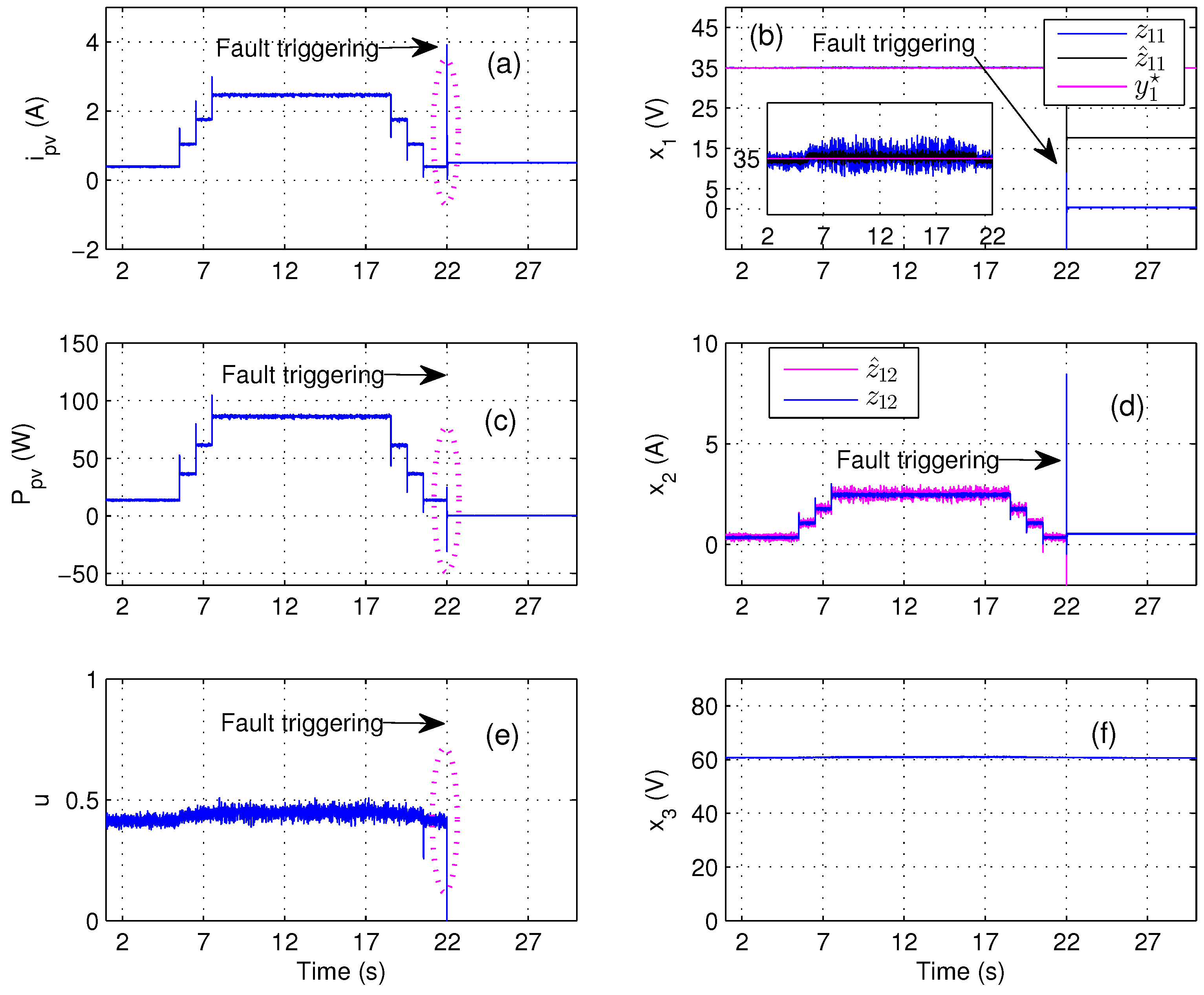
5.2. Experimental Test E1
5.3. Experimental Test
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| FI | Fault identification |
| SOCSF | Short- and open-circuit switch faults |
| MPPT | Maximum power point tracker |
| PV | Photovoltaic |
| PD | Proportional derivative |
| FDI | Fault detection and isolation |
| MPP-ST | Maximum power point searching technique |
| MPP | Maximum power point |
| PVM | Photovoltaic module |
Appendix A. MPPT Controller Derivation
Appendix B. Observer Gains Selection
References
- Espinoza-Trejo, D.R.; Bárcenas, E.; Campos-Delgado, D.U.; De Angelo, C.H. Voltage-Oriented Input-Output Linearization Controller as Maximum Power Point Tracking Technique for Photovoltaic Systems. IEEE Trans. Ind. Electron. 2015, 62, 3499–3507. [Google Scholar] [CrossRef]
- Kakosimos, P.E.; Kladas, A.G.; Manias, S.N. Fast Photovoltaic-System Voltage or Current-Oriented MPPT Employing a Predictive Digital Current-Controlled Converter. IEEE Trans. Ind. Electron. 2013, 60, 5673–5685. [Google Scholar] [CrossRef]
- Martin, A.D.; Cano, J.M.; Silva, J.F.A.; Vazquez, J.R. Backstepping Control of Smart Grid-Connected Distributed Photovoltaic Power Supplies for Telecom Equipment. IEEE Trans. Energy Convers. 2015, 30, 1496–1504. [Google Scholar] [CrossRef]
- Ma, S.; Chen, M.; Wu, J.; Huo, W.; Huang, L. Augmented Nonlinear Controller for Maximum Power-Point Tracking with Artificial Neural Network in Grid-Connected Photovoltaic Systems. Energies 2016, 9, 1005. [Google Scholar] [CrossRef]
- Robles Algarín, C.; Taborda Giraldo, J.; Rodríguez Álvarez, O. Fuzzy Logic Based MPPT Controller for a PV System. Energies 2017, 10, 2036. [Google Scholar] [CrossRef]
- Bianconi, E.; Calvente, J.; Giral, R.; Mamarelis, E.; Petrone, G.; Ramos-Paja, C.A.; Spagnuolo, G.; Vitelli, M. A Fast Current-Based MPPT Technique Employing Sliding Mode Control. IEEE Trans. Ind. Electron. 2013, 60, 1168–1178. [Google Scholar] [CrossRef]
- Yang, S.; Bryant, A.; Mawby, P.; Xiang, D.; Ran, L.; Tavner, P. An Industry-Based Survey of Reliability in Power Electronic Converters. IEEE Trans. Ind. Appl. 2011, 47, 1441–1451. [Google Scholar] [CrossRef]
- Neeb, C.; Boettcher, L.; Conrad, M.; De Doncker, R.W. Innovative and Reliable Power Modules: A future Trend and Evolution of Technologies. IEEE Ind. Electron. Mag. 2014, 8, 6–16. [Google Scholar] [CrossRef]
- Batunlu, C.; Alrweq, M.; Albarbar, A. Effects of Power Tracking Algorithms on Lifetime of Power Electronic Devices Used in Solar Systems. Energies 2016, 9, 884. [Google Scholar] [CrossRef]
- Nie, S.; Pei, X.; Chen, Y.; Kang, Y. Fault Diagnosis of PWM DC-DC Converters Based on Magnetic Component Voltages Equation. IEEE Trans. Power Electron. 2014, 29, 4978–4988. [Google Scholar] [CrossRef]
- Jamshidpour, E.; Poure, P.; Gholipour, E.; Saadate, S. Single-Switch DC-DC Converter with Fault-Tolerant Capability under Open- and Short-Circuit Switch Failures. IEEE Trans. Power Electron. 2015, 30, 2703–2712. [Google Scholar] [CrossRef]
- Farjah, E.; Givi, H.; Ghanbari, T. Application of an Efficient Rogowski Coil Sensor for Switch Fault Diagnosis and Capacitor ESR Monitoring in Nonisolated Single-Switch DC-DC Converters. IEEE Trans. Power Electron. 2017, 32, 1442–1456. [Google Scholar] [CrossRef]
- Ribeiro, E.; Marques Cardoso, A.J.; Boccaletti, C. Fault-Tolerant Strategy for a Photovoltaic dc/dc Converter. IEEE Trans. Power Electron. 2013, 28, 3008–3018. [Google Scholar] [CrossRef]
- Ribeiro, E.; Marques Cardoso, A.J.; Boccaletti, C. Open-Circuit Fault Diagnosis in Interleaved dc/dc Converters. IEEE Trans. Power Electron. 2014, 29, 3091–3102. [Google Scholar] [CrossRef]
- Jamshidpour, E.; Poure, P.; Saadate, S. Photovoltaic Systems Reliability Improvement by Real-Time FPGA-Based Switch Failure Diagnosis and Fault-Tolerant dc/dc Converter. IEEE Trans. Ind. Electron. 2015, 62, 7247–7255. [Google Scholar] [CrossRef]
- Yan, X.G.; Edwards, C. Nonlinear robust fault reconstruction and estimation using a sliding mode observer. Automatica 2007, 43, 1605–1614. [Google Scholar] [CrossRef]
- Poon, J.; Jain, P.; Konstantakopoulos, I.C.; Spanos, C.; Panda, S.K.; Sanders, S.R. Model-Based Fault Detection and Identification for Switching Power Converters. IEEE Trans. Power Electron. 2017, 32, 1419–1430. [Google Scholar] [CrossRef]
- Chen, J.; Patton, R.J. Robust Model-Based Fault Diagnosis for Dynamic Systems; Springer Science+Business Media: New York, NY, USA, 1999. [Google Scholar]
- Mahmoud, Y.; Xiao, W.; Zeineldin, H.H. A Simple Approach to Modeling and Simulation of Photovoltaic Modules. IEEE Trans. Sustain. Energy 2012, 3, 185–186. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Tobón, A.; Peláez-Restrepo, J.; Villegas-Ceballos, J.P.; Serna-Garcés, S.I.; Herrera, J.; Ibeas, A. Maximum Power Point Tracking of Photovoltaic Panels by Using Improved Pattern Search Methods. Energies 2017, 10, 1316. [Google Scholar] [CrossRef]
- Chao, K.H.; Wu, M.C. Global Maximum Power Point Tracking (MPPT) of a Photovoltaic Module Array Constructed through Improved Teaching-Learning-Based Optimization. Energies 2016, 9, 986. [Google Scholar] [CrossRef]
- Alajmi, B.N.; Ahmed, K.H.; Finney, S.J.; Williams, B.W. A Maximum Power Point Tracking Technique for Partially Shaded Photovoltaic Systems in Microgrids. IEEE Trans. Ind. Electron. 2013, 60, 1596–1606. [Google Scholar] [CrossRef]
- Lyden, S.; Haque, M.E. Maximum Power Point Tracking techniques for photovoltaic systems: A comprehensive review and comparative analysis. Renew. Sustain. Energy Rev. 2015, 52, 1504–1518. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Espinoza Trejo, D.R.; Bárcenas, E.; Hernández Díez, J.E.; Bossio, G.; Espinosa Pérez, G. Open- and Short-Circuit Fault Identification for a Boost dc/dc Converter in PV MPPT Systems. Energies 2018, 11, 616. https://doi.org/10.3390/en11030616
Espinoza Trejo DR, Bárcenas E, Hernández Díez JE, Bossio G, Espinosa Pérez G. Open- and Short-Circuit Fault Identification for a Boost dc/dc Converter in PV MPPT Systems. Energies. 2018; 11(3):616. https://doi.org/10.3390/en11030616
Chicago/Turabian StyleEspinoza Trejo, Diego R., Ernesto Bárcenas, José E. Hernández Díez, Guillermo Bossio, and Gerardo Espinosa Pérez. 2018. "Open- and Short-Circuit Fault Identification for a Boost dc/dc Converter in PV MPPT Systems" Energies 11, no. 3: 616. https://doi.org/10.3390/en11030616
APA StyleEspinoza Trejo, D. R., Bárcenas, E., Hernández Díez, J. E., Bossio, G., & Espinosa Pérez, G. (2018). Open- and Short-Circuit Fault Identification for a Boost dc/dc Converter in PV MPPT Systems. Energies, 11(3), 616. https://doi.org/10.3390/en11030616