1. Introduction
The power pollution in power systems, which results from rectifiers, arc furnaces, nonlinear loads and switching power supplies, has been gained wide attention in recent years [
1,
2]. Moreover, owing to the increasing usage of power electronic equipment, the power quality in the distribution system is seriously deteriorated. Not only the voltage and current could not be operated within reasonable values, but the resulting non-sinusoidal currents could also cause voltage distortion on the load side. On the other hand, the deterioration of the power quality can be compensated effectively by using power electronic technologies [
3,
4]. The active power filter (APF) is one of the powerful tools used to compensate the load harmonics, unbalanced load currents and reactive power and has recently been widely adopted to improve the power quality [
5,
6,
7]. APFs can be classified into series, shunt and hybrid APFs three categories [
8,
9]. A series APF is connected with the power grid in series and is effective to generate harmonic voltages to compensate load harmonic voltages [
10]. Furthermore, the series APF is usually employed to protect sensitive loads in polluted grid scenarios. A series APF for the compensation of harmonics and reactive power generated by the non-linear loads was proposed in [
11]. In [
12], at the point of common coupling, a series APF based on a single-phase matrix converter was adopted to protect sensitive loads from the effects of voltage disturbances. However, the complexity of installation in practical applications limits the use of the series APF [
13]. In addition, the hybrid APF is formed by an APF and a passive filter. In [
14], a hybrid APF, which is composed of a series APF and a shunt-connected passive filter, was adopted to improve the power quality. Due to the complicated structure, the hybrid APF is still too complicated for practical applications [
13]. On the other hand, a shunt APF is usually employed to compensate the harmonics introduced by non-linear loads connected to the power grid [
12]. In order to compensate load harmonic currents, a shunt APF is directly connected with the power grid and loads in parallel, and is used to generate harmonic currents [
10]. Owing to the simplified structure, the shunt APF has become the most widely employed type [
10,
15,
16,
17]. In [
15], an adaptive hysteresis and fuzzy logic control-based three-phase four-leg interleaved buck APF was proposed to eliminate current harmonics and compensate the unbalanced load currents. In [
16], a nonlinear control algorithm of the shunt APF was proposed to enhance the response for compensating the load currents. An APF using the synchronous reference frame and indirect current control strategy for improving the power quality under the unbalanced and distorted system conditions was proposed in [
17]. Additionally, the power circuits for APFs can be classified into two types: voltage source converters with DC capacitor and current source converters with DC inductor [
18]. Since a free-wheeling diode is connected in anti-parallel with each IGBT, the IGBT module is more suitable for the voltage source converter with DC capacitor. This means that the IGBT doesn’t need to provide the ability of reverse-blocking in itself. Hence, the IGBT possesses more flexibility for device design in a compromise among switching losses, conducting losses and short circuit ability than the reverse-blocking IGBT. On the other hand, a reverse-blocking diode is connected in series with each IGBT to construct the current source converter with DC inductor. The reverse-blocking IGBT leads to worse device characteristics and more complicated fabrication and device design than the traditional IGBT without reverse-blocking ability. Therefore, compared with the current source converter with DC inductor, the voltage source converter with DC capacitor possesses the advantages of small size, low cost, and high efficiency [
18]. Moreover, since the control algorithm of the APF will cause a large amount of apparent power, which includes the active power for the losses and reactive power for the capacitor, flowing into or out of the APF, a DC-link capacitor is required on the DC side of the APF to release or absorb the apparent power [
19,
20]. Therefore, the regulation control of the DC-link voltage of the APF is important especially at the load variation condition. However, traditional proportional-integral (PI) controller has been adopted for the DC-link voltage regulation control only resulted in sluggish responses [
19,
20].
Recently, a probabilistic fuzzy neural network (PFNN) has been proposed for an induction generator system to improve its transient control performance [
21]. The PFNN is composed of probabilistic neural network (PNN) and fuzzy logic. The PNN combines the feedforward neural networks and statistical pattern recognition methods to form a powerful discrimination tool [
22]. Since the PNN possesses the probability density function estimator and Bayes classification rule [
21], the PNN has superior modeling performance and adaptability [
23]. Moreover, the fuzzy logic possesses the capabilities of fuzzy reasoning in handling uncertain information and approximating nonlinear systems [
24]. Thus, many researchers have used PFNN to represent complex plants or design advanced controller [
25,
26]. Furthermore, the Petri net (PN) possesses analytical, graphical and mathematical modeling capabilities [
27]. Hence, the PN is widely adopted to analyze the behavior of discrete event systems and is an effective tool for the verification of concurrent, parallel, distributed, asynchronous and uncertain information processing systems [
28,
29,
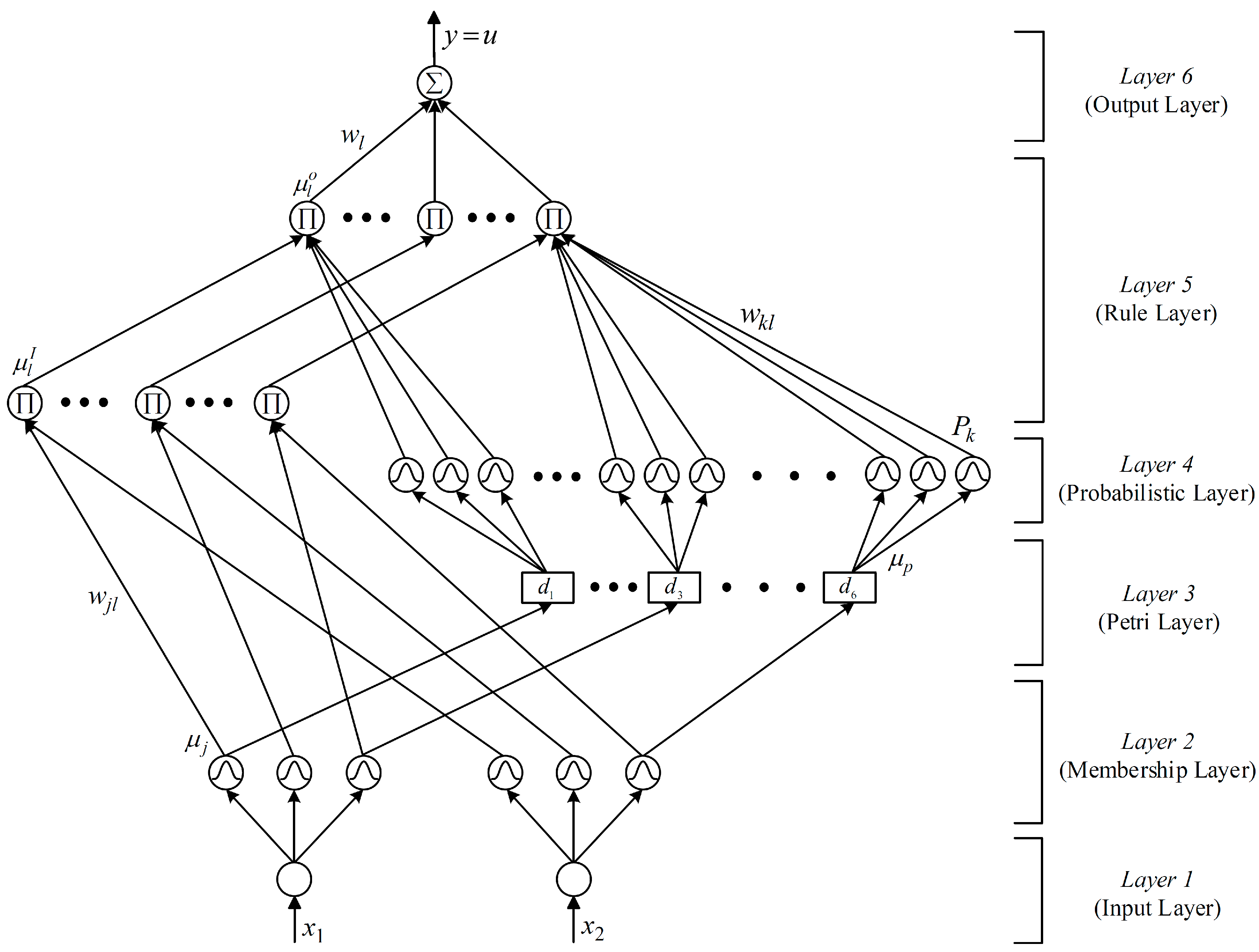
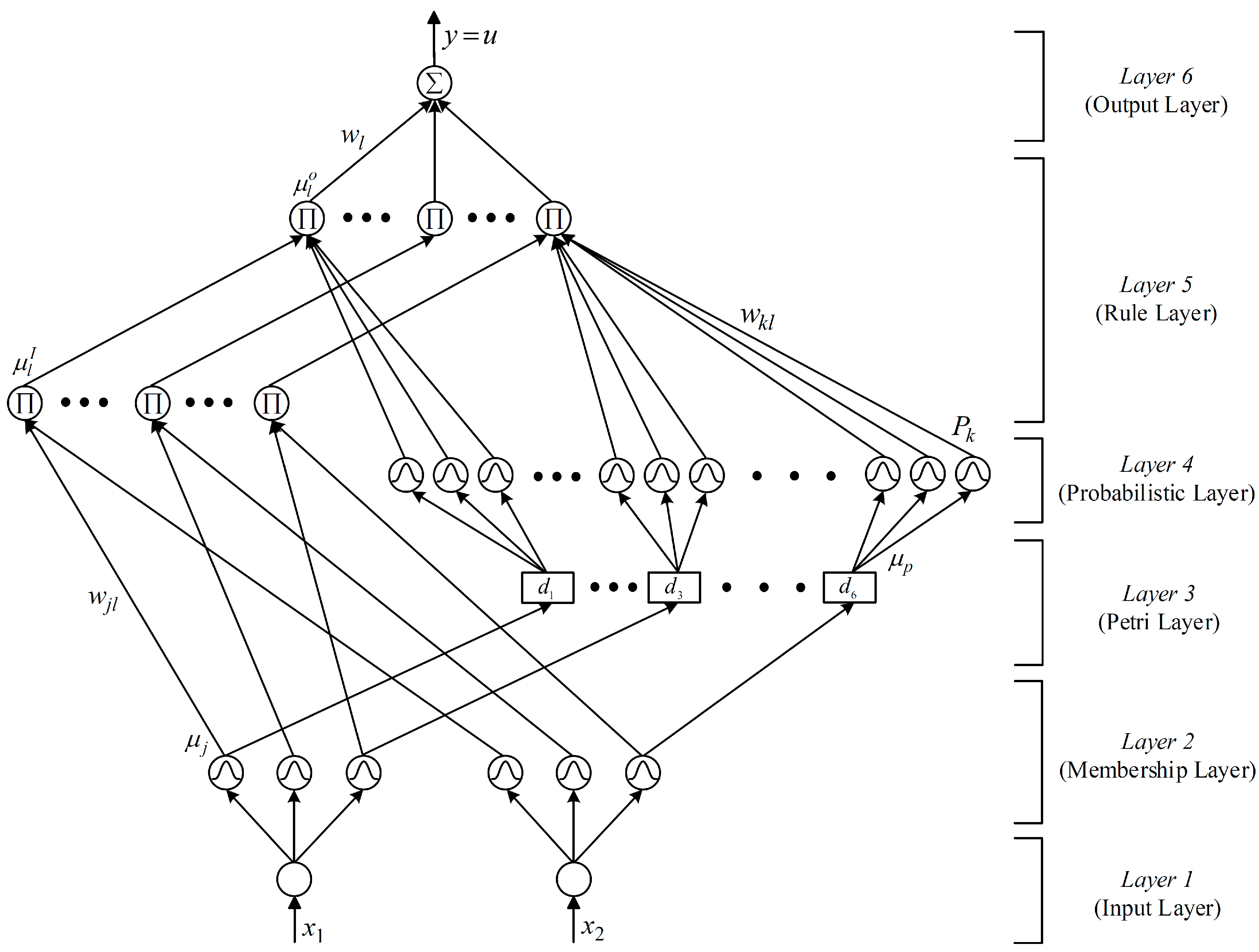
30]. Owing to the above advantages of the PFNN and the PN, a Petri probabilistic fuzzy neural network (PPFNN), which integrates the advantages of PN and PFNN, is first proposed in this study to improve the transient and steady-state responses of the DC-link voltage of the shunt APF under unbalanced load change and to compensate the three-phase unbalanced currents effectively.
In this study, a three-phase four-leg inverter-based shunt APF is proposed to compensate the three-phase unbalanced currents under three-phase unbalanced load in grid-connected operation. Moreover, in order to improve the control performance of the DC-link voltage of the shunt APF under unbalanced load variation condition, an online trained PPFNN is proposed as a regulation controller to replace the traditional proportional-integral (PI) controller in the shunt APF. Furthermore, a backpropagation (BP) based online training algorithm is derived to train the connective weights and parameters of the membership functions of the proposed PPFNN online. In addition, the proposed PPFNN controller to control the DC-link voltage of the three-phase four-leg inverter-based shunt APF is implemented by a control platform using the Texas Instruments (TI) digital signal processor (DSP) TMS320F28335. The operating theories of the three-phase four-leg inverter-based shunt APF will be introduced in
Section 2. The network structure, online learning algorithms and convergence analysis of the proposed PPFNN will be described in
Section 3. Then, the detailed implementation of the intelligent PPFNN controlled shunt APF will be presented in
Section 4. Finally, the conclusions can be found in
Section 5.
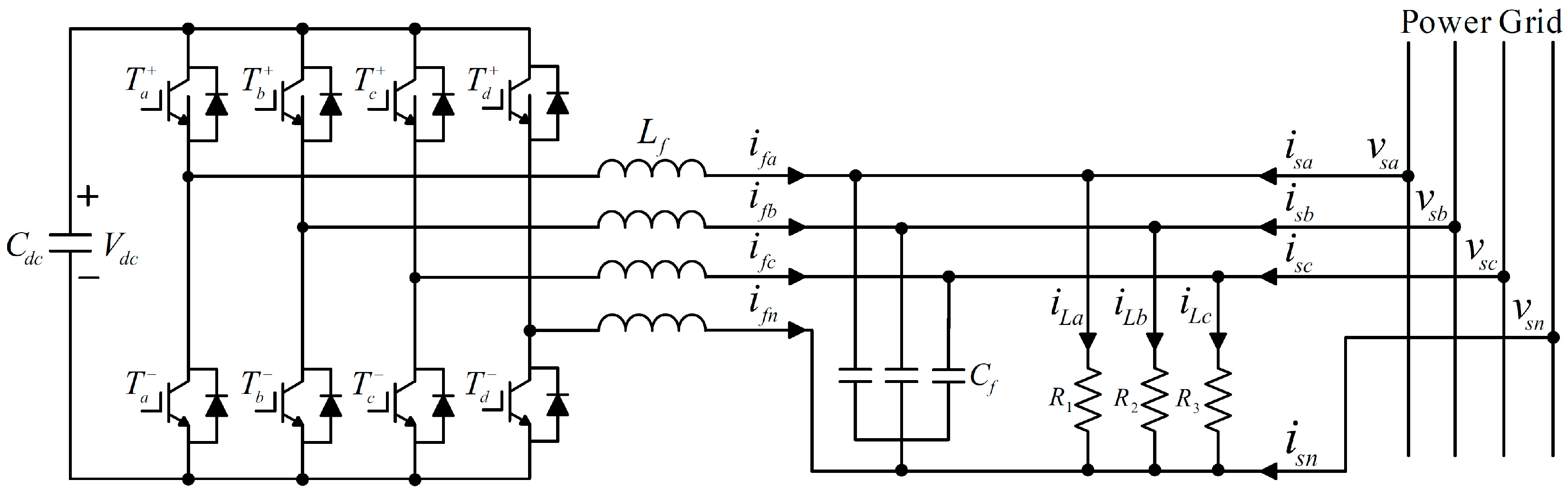
2. Three-Phase Four-Leg Inverter-Based Shunt APF
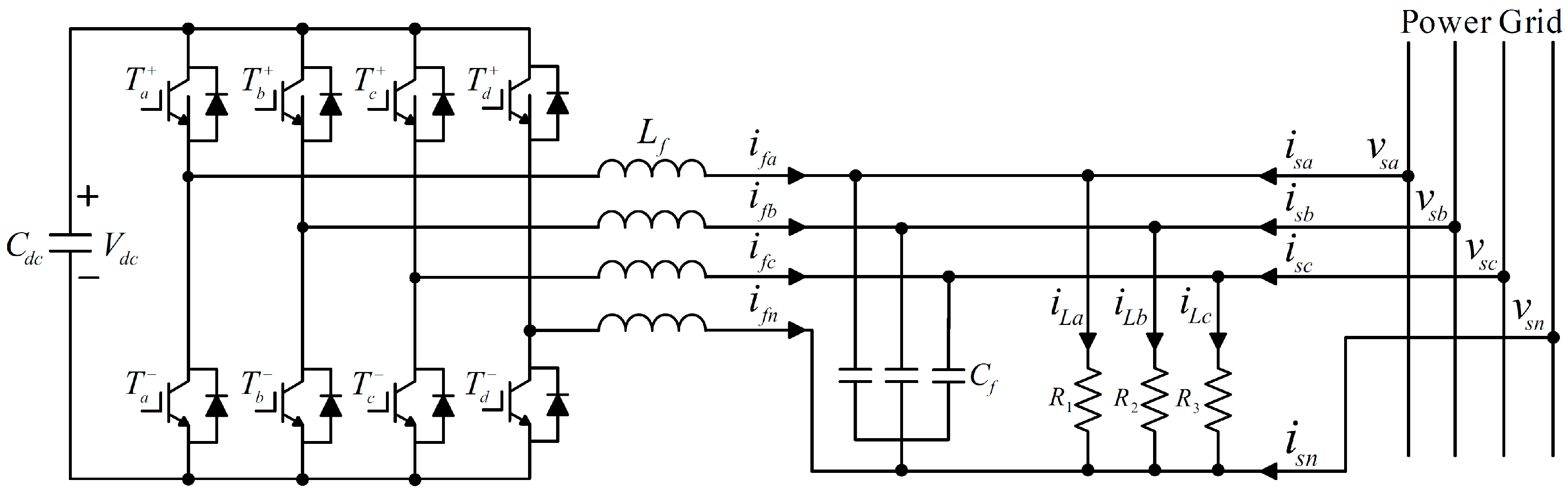
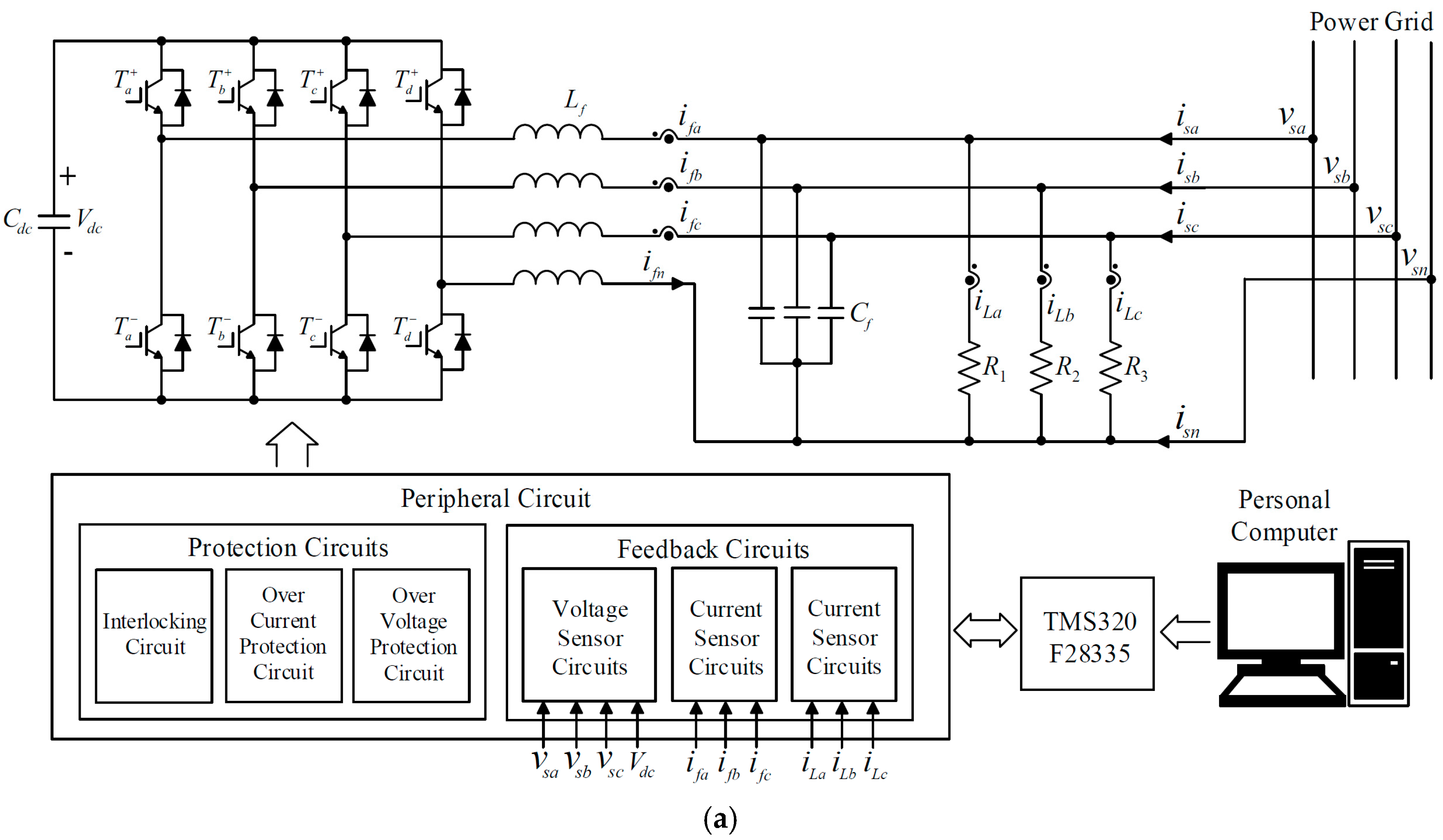
The circuit scheme of the three-phase four-leg inverter-based shunt APF in grid-connected operation is shown in
Figure 1. The values of the inductor
Lf and capacitor
Cf are 3 mH and 3 μF, respectively. The three-phase voltages
vsa,
vsb,
vsc are 180 V and the line to line voltage of the power grid is 220 Vrms. Three resistors
R1,
R2,
R3 are designed to be unbalanced and are connected with the power grid of a distribution system. The resulted non-sinusoidal currents could deteriorate the power quality seriously in the distribution system especially for a microgrid system operated in islanding mode [
3]. Moreover, the main objective of the three-phase four-leg inverter-based shunt APF is to compensate the three-phase unbalanced currents caused by unbalanced loads
R1,
R2,
R3. The three legs of the inverter-based shunt APF are used to generate the compensated current components
and make the three-phase currents
of the power grid be balanced and sinusoidal. The fourth leg is used to suppress the neutral current. The relation of the four leg currents is described as follows:
And
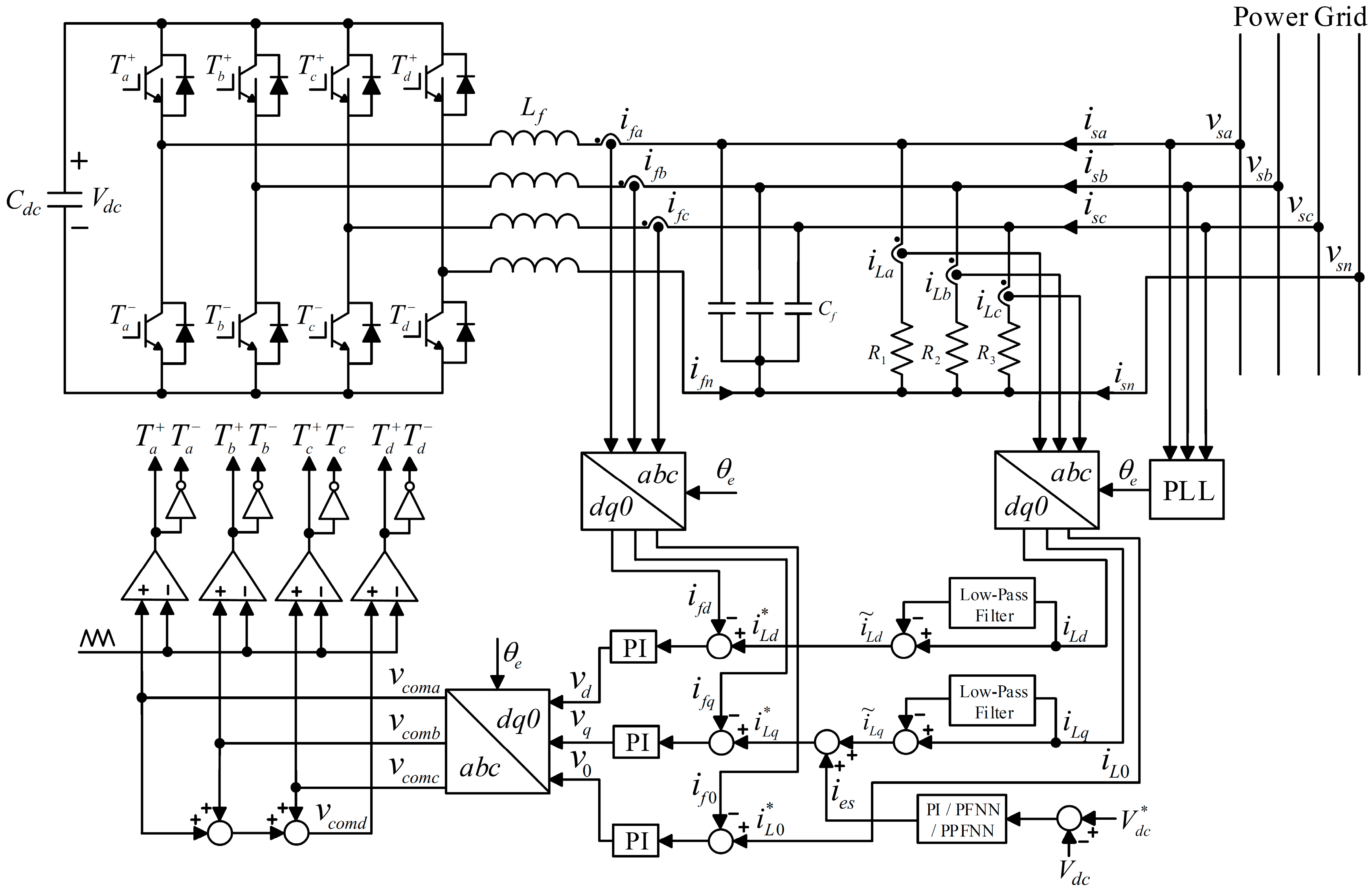
is the neutral current of the power grid. Furthermore, the control scheme of the shunt APF is shown in
Figure 2. First, the three-phase voltages
of the power grid are detected to obtain the synchronous angle
via the phase locked loop (PLL) unit. Then, the three-phase load currents
are detected and transferred to
synchronous reference frame as follows:
where
iLd,
iLq, and
iL0 are the
d,
q and zero axis currents, respectively. Then, the dc components are extracted via two low pass filters which the transfer functions are designed as follows:
where the gain
k = 1, damping ratio
ξ = 0.7, and angular cut-off frequency
ω = 20
π rad/s. The dc components are subtracted by
iLd, and
iLq, to generate
dq-axis current harmonic components
and
. In addition, the DC-link voltage
Vdc of the shunt APF is detected and compared with the DC-link voltage command
. The DC-link voltage error is then sent to a PI, PFNN or PPFNN controller, and the control current
ies is produced to maintain the constant DC-link voltage
Vdc of the shunt APF. The control current
ies is added to the
q-axis current harmonic component
to obtain the
q-axis current command
, and name the
d-axis current harmonic component
and zero axis current
iL0 to equal to the
d-axis current command
and zero axis current command
, respectively. The compensated current outputs
ifa,
ifb, ifc of the inverter-based shunt APF are also detected and transferred to
dq0 synchronous reference frame to obtain the
ifd,
ifq, and
if0 currents, respectively. The three currents
ifd,
ifq,
if0 are compared with the current commands
, respectively and three voltage components
vd,
vq,
v0 can be calculated by using three respective PI controller. The three control commands
vcoma,
vcomb,
vcomc are obtained through
dq0/
abc coordinate transformation as follows:
The fourth control command will be computed as follows:
Finally, the pulse width modulation (PWM) switching signals are generated for maintaining the constant DC-link voltage Vdc and compensating the three-phase unbalanced currents in the three-phase four-leg inverter-based shunt APF.
4. Experimental Results
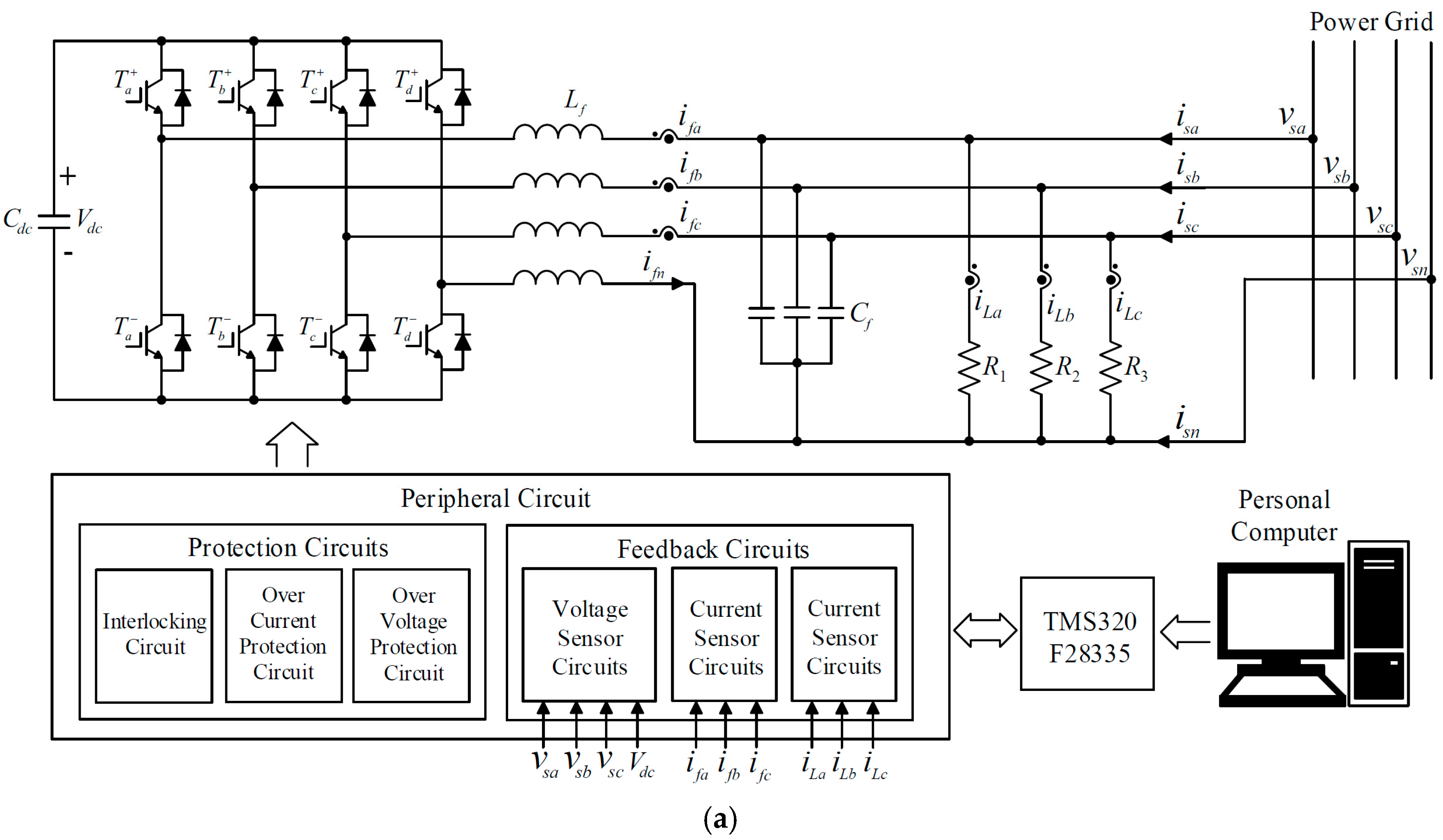
The block diagram of the three-phase four-leg inverter-based shunt APF and the photos of the experimental setups are provided in
Figure 4. The block diagram of the DSP-based APF is illustrated in
Figure 4a. The control algorithms, including the PLL, the unbalanced currents compensation, and the proposed PPFNN control, are implemented by the control platform using the TI DSP TMS320F28335. The peripheral circuits consist of the feedback and protect circuits. The feedback circuits are composed of two current sensors and a voltage sensor to detect the compensated current components
ifa,
ifb,
ifc, the three-phase load currents
iLa,
iLb,
iLc and the three-phase voltages
vsa,
vsb,
vsc of the power grid. The over voltage/current and interlock circuits are also implemented in the control platform. Moreover, three unbalanced loads are designed as follows: (1) load 1 consists of
R1 = 80 Ω,
R2 = 40 Ω,
R3 = 100 Ω; (2) load 2 consists of
R1 = 40 Ω,
R2 = 20 Ω,
R3 = 60 Ω; (3) load 3 consists of
R1 = 20 Ω,
R2 = 10 Ω,
R3 = 50 Ω. The DC-link voltage command
of the shunt APF is set to be 450 V. Furthermore, the photos of the experimental setups are shown in
Figure 4b. A photo of the three-phase four-leg inverter is provided as
Figure 4c. In this study, two three-phase three-leg inverters are adopted to build up one three-phase four-leg inverter. In order to compare the compensation performance of the shunt APF using the proposed PPFNN controller, the experimental results using PI and PFNN controllers are also demonstrated in this study. The optimized parameters of the PI controller are obtained as
Kp = 1.161,
KI = 312.67 according to [
35]. In addition, a three-phase unbalanced current ratio
UR is defined in the following to compare the compensation performance of the shunt APF:
where Max(
isa,
isb,
isc) is the maximum RMS current of the three-phase currents
isa,
isb,
isc of the power grid; Min(
isa,
isb,
isc) is the minimum RMS current of the three-phase currents
isa,
isb,
isc; Average(
isa,
isb,
isc) is the average RMS current of the three-phase currents
isa,
isb,
isc. The lesser value the three-phase unbalanced current ratio
UR is, the more superior compensation performance the shunt APF possesses.
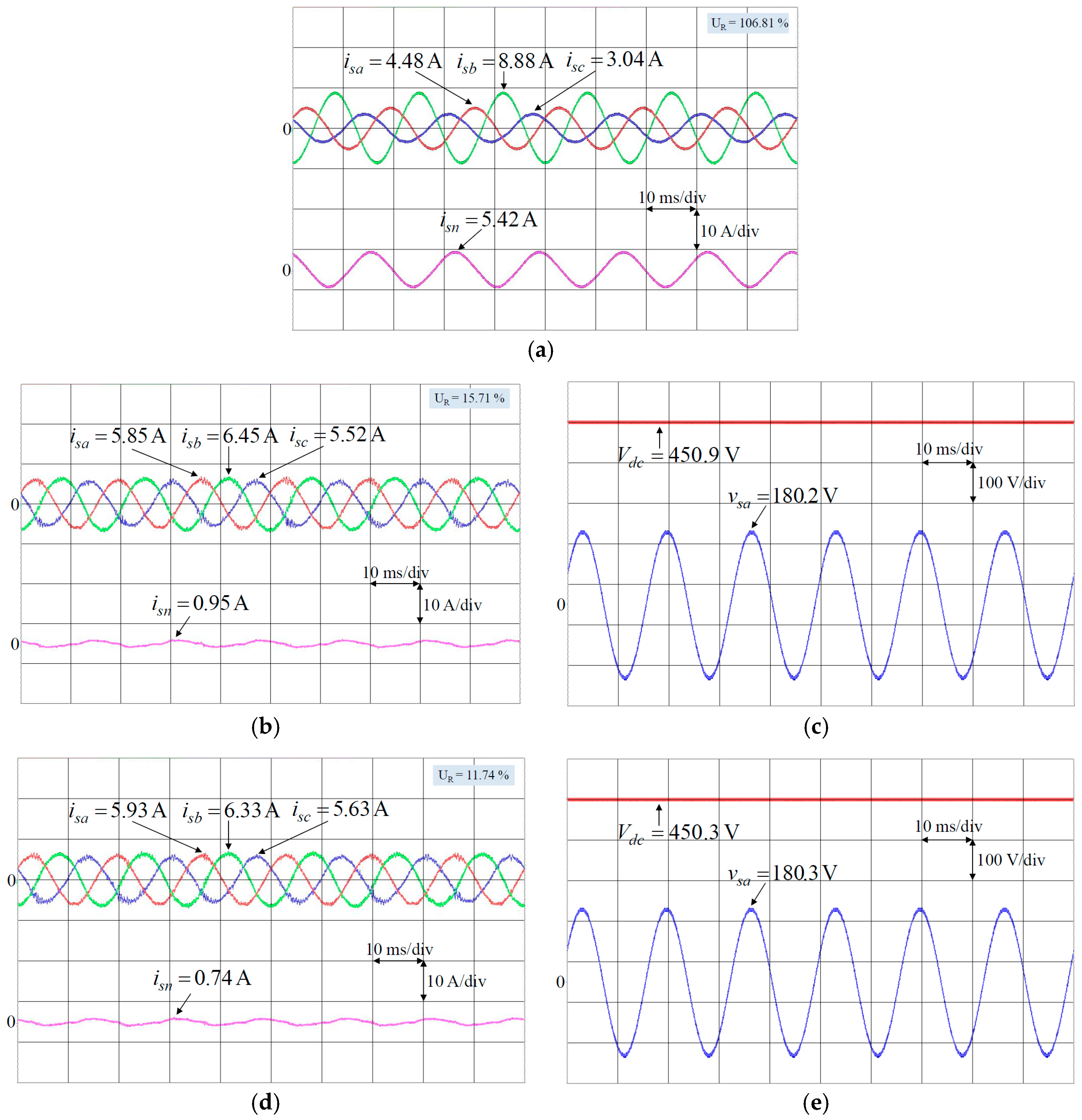
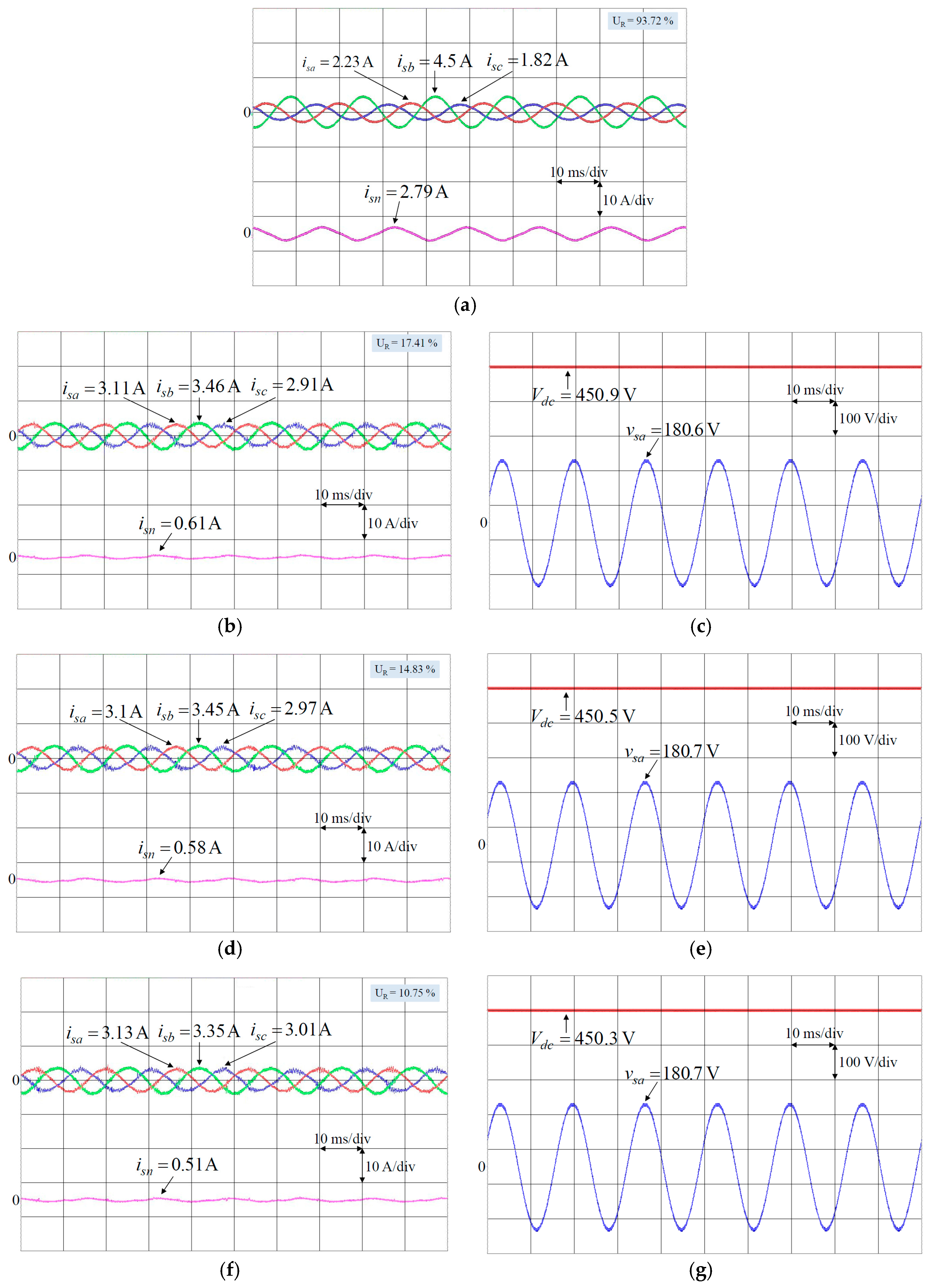
In order to verify the effectiveness of the three-phase four-leg inverter-based shunt APF under unbalanced load conditions, the experimental results without using the shunt APF and the experimental results using PI, PFNN and the proposed PPFNN controlled shunt APFs at the unbalanced load 1 are provided to demonstrate the compensation performance as shown in
Figure 5. The responses of the three-phase currents
isa,
isb,
isc and neutral current
isn without using the shunt APF are shown in
Figure 5a; the responses of the three-phase currents
isa,
isb,
isc, neutral current
isn, DC-link voltage
Vdc and phase voltage of the power grid using PI controlled shunt APF are shown in
Figure 5b,c; the responses of the three-phase currents
isa,
isb,
isc, neutral current
isn, DC-link voltage
Vdc and phase voltage of the power grid using PFNN controlled shunt APF are shown in
Figure 5d,e; the responses of the three-phase currents
isa,
isb,
isc, neutral current
isn, DC-link voltage
Vdc and phase voltage of the power grid using the proposed PPFNN controlled shunt APF are shown in
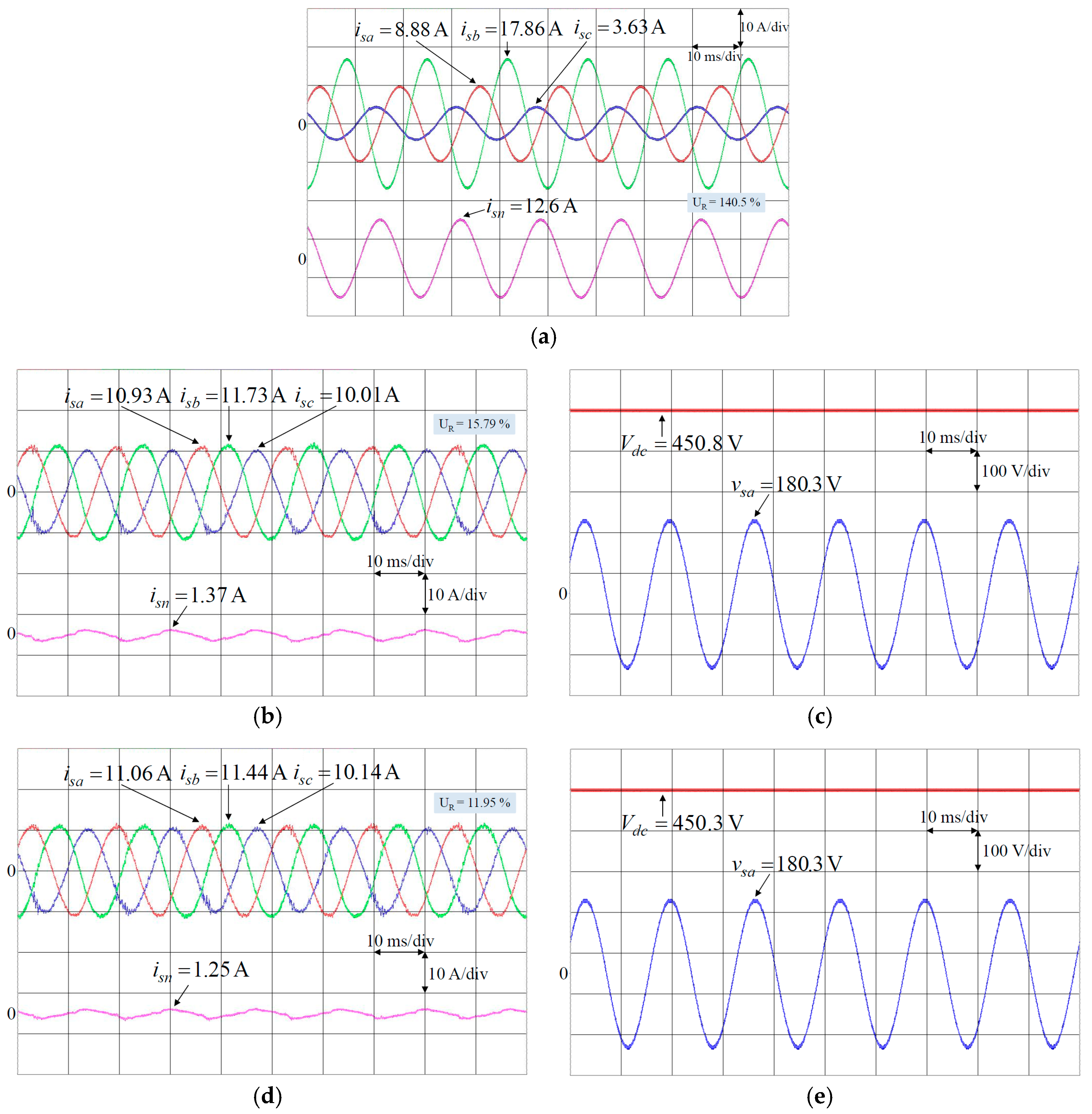
Figure 5f,g. From the experimental results shown in
Figure 5a, owing to the unbalanced load 1 connected with the power grid and the absence of the shunt APF, the three-phase currents
isa,
isb,
isc of the power grid are unbalanced with large neutral current
isn. The peak value of the neutral current
isn is 2.79 A. The main objective of the three-phase four-leg inverter-based shunt APF is to generate the compensated current components
ifa,
ifb,
ifc to make the three-phase currents
isa,
isb,
isc of the power grid be balanced, and suppress the neutral current
isn. Hence, from the experimental results using PI controlled APF as shown in
Figure 5b,c, the three-phase currents
isa,
isb,
isc of the power grid can be compensated to be balanced and the peak value of the neutral current
isn can be suppressed to be 0.61 A as shown in
Figure 5b. The responses of DC-link voltage
Vdc and phase voltage
vsa of the power grid using PI controlled shunt APF are shown in
Figure 5c. Moreover, from the experimental results using PFNN controlled APF as shown in
Figure 5d,e, the three-phase currents
isa,
isb,
isc of the power grid can be compensated and the peak value of the neutral current
isn can be suppressed to be 0.58 A as shown in
Figure 5d. The responses of DC-link voltage
Vdc and phase voltage
vsa of the power grid using PFNN controlled shunt APF are shown in
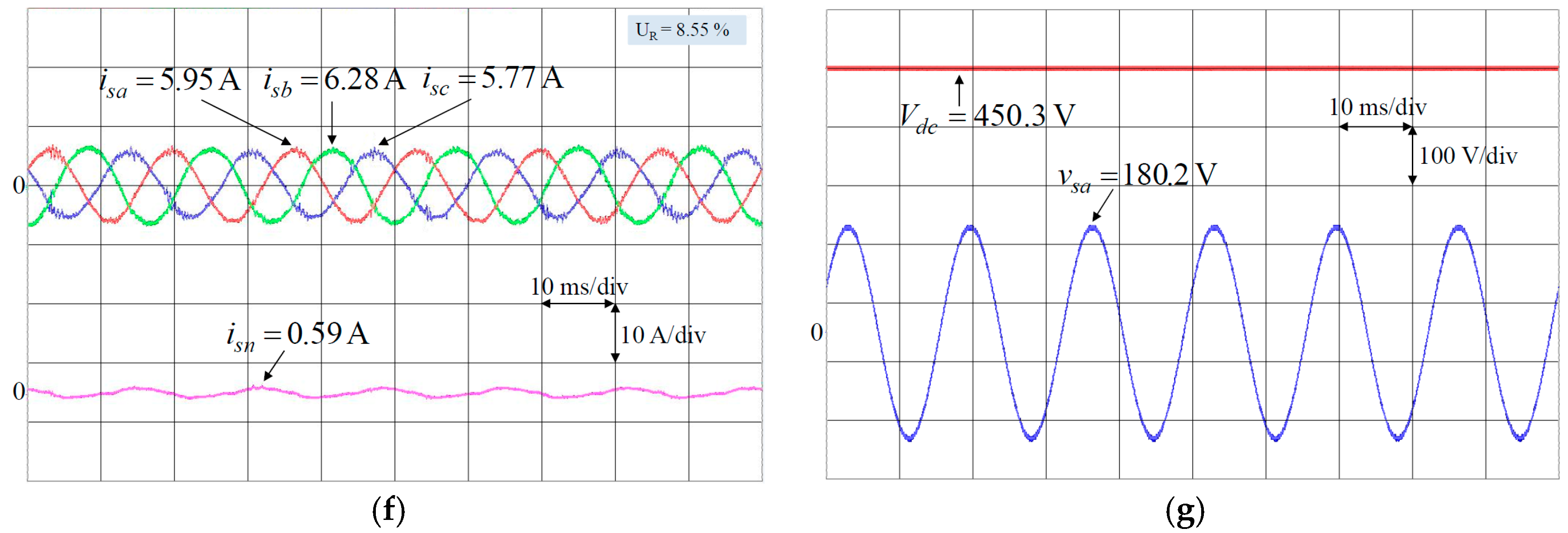
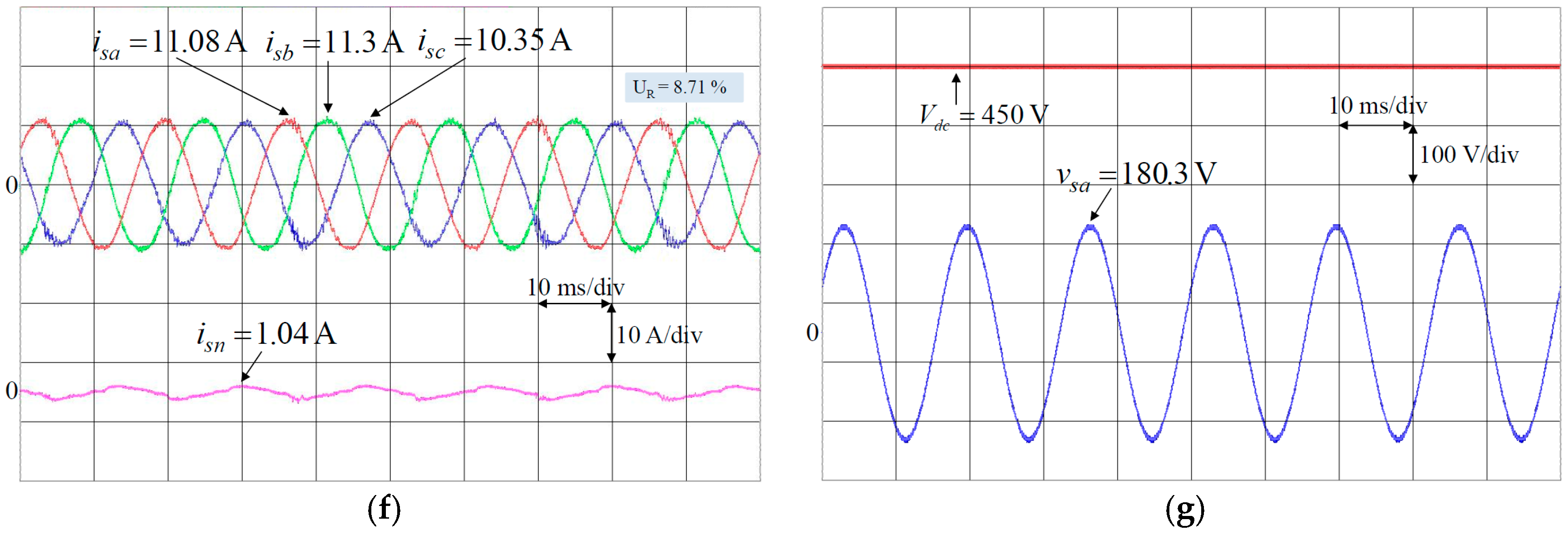
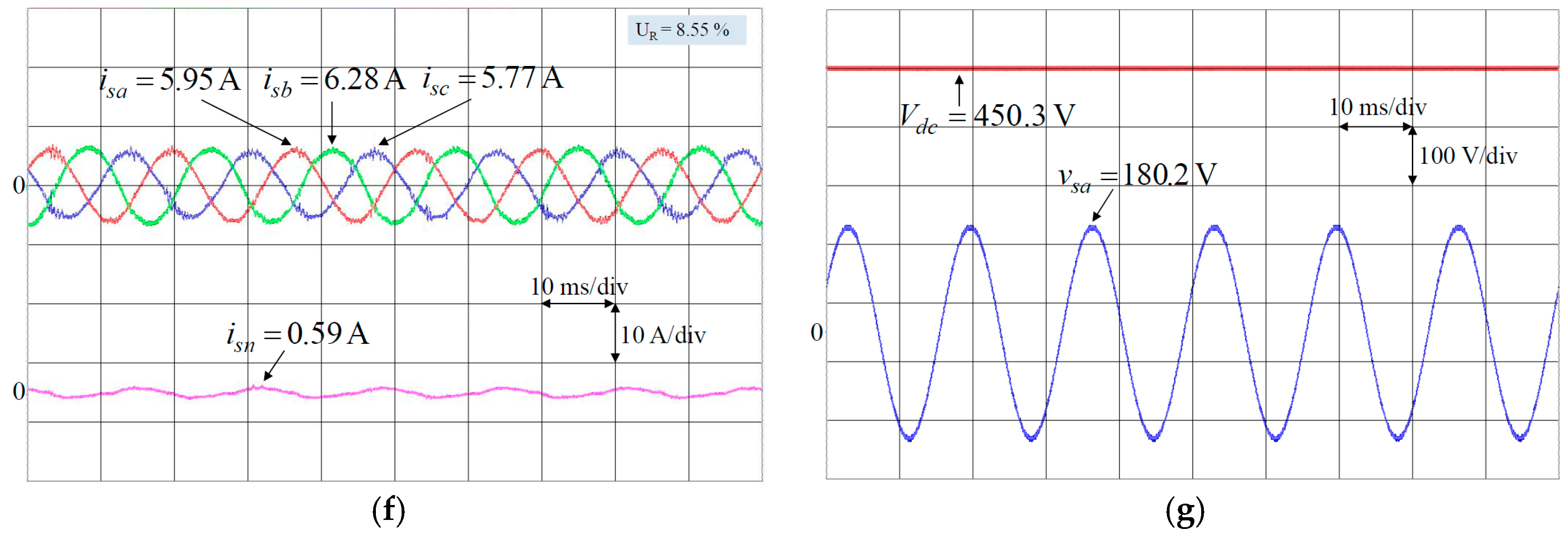
Figure 5e. Furthermore, from the experimental results using the proposed PPFNN controlled APF as shown in
Figure 5f,g. The three-phase currents
isa,
isb,
isc of the power grid can be also compensated to be balanced and the peak value of the neutral current
isn can be suppressed to be 0.51 A as shown in
Figure 5f. The responses of DC-link voltage
Vdc and phase voltage
vsa of the power grid using the proposed PPFNN controlled shunt APF are shown in
Figure 5g. In addition, the experimental results without using the shunt APF and the experimental results using PI, PFNN and the proposed PPFNN controlled shunt APFs at the unbalanced loads 2 and 3 are provided in
Figure 6 and
Figure 7, respectively. Additionally, the three-phase unbalanced current ratio
UR without using the shunt APF and the unbalanced current ratio
UR using PI, PFNN and the proposed PPFNN controlled shunt APF at the unbalanced loads 1–3 are provided in
Table 1. From
Table 1, since the proposed PPFNN controlled shunt APF possesses not only the abilities of the PFNN but also the analytical, graphical and mathematical modeling capabilities of PN, the three-phase unbalanced current ratio
UR of the proposed PPFNN controlled shunt APF is better than PI and PFNN controlled shunt APFs.
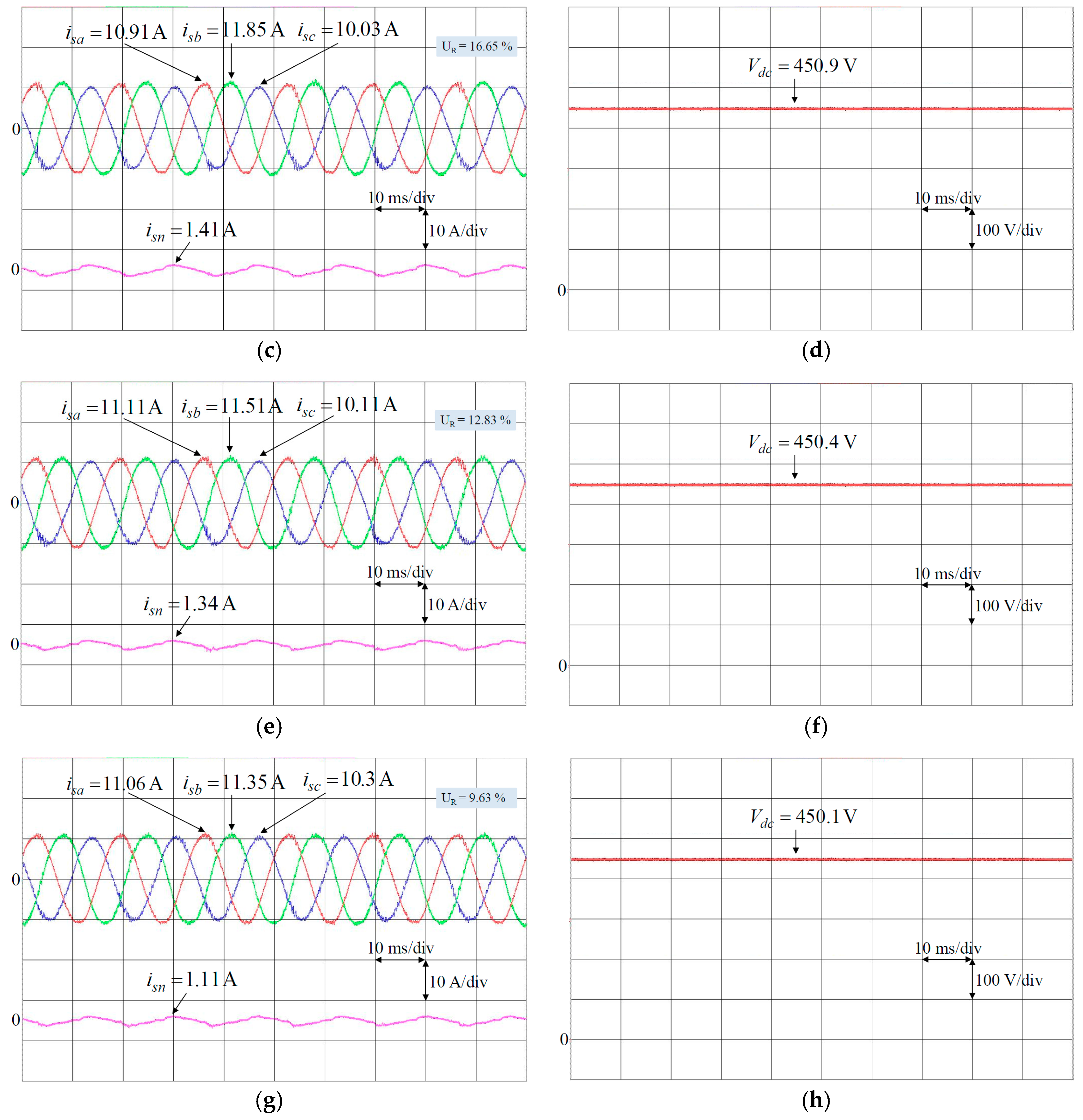
To further verify the feasibility and the effectiveness of the proposed PPFNN controlled APF with system uncertainties, a two-phase to ground fault with 0.2 per unit (pu) voltage dip on the power grid is considered at the unbalanced load 3. The experimental results without using the shunt APF and the experimental results using PI, PFNN and the proposed PPFNN controlled shunt APFs at the unbalanced load 3 under abnormal grid voltage are provided in
Figure 8. First, the responses of the amplitude of grid voltage with 0.2 pu voltage dip is shown in
Figure 8a. Then, the responses of three-phase currents
isa,
isb,
isc and neutral current
isn without using shunt APF are provided in
Figure 8b. The three-phase unbalanced current ratio
UR without using the shunt APF is 133.5% and the peak value of the neutral current
isn is 9.66 A. Furthermore, the responses of the three-phase currents
isa,
isb,
isc and neutral current
isn and DC-link voltage
Vdc using PI controlled shunt APF are shown in
Figure 8c,d; the responses of the three-phase currents
isa,
isb,
isc and neutral current
isn and DC-link voltage
Vdc using PFNN controlled shunt APF are shown in
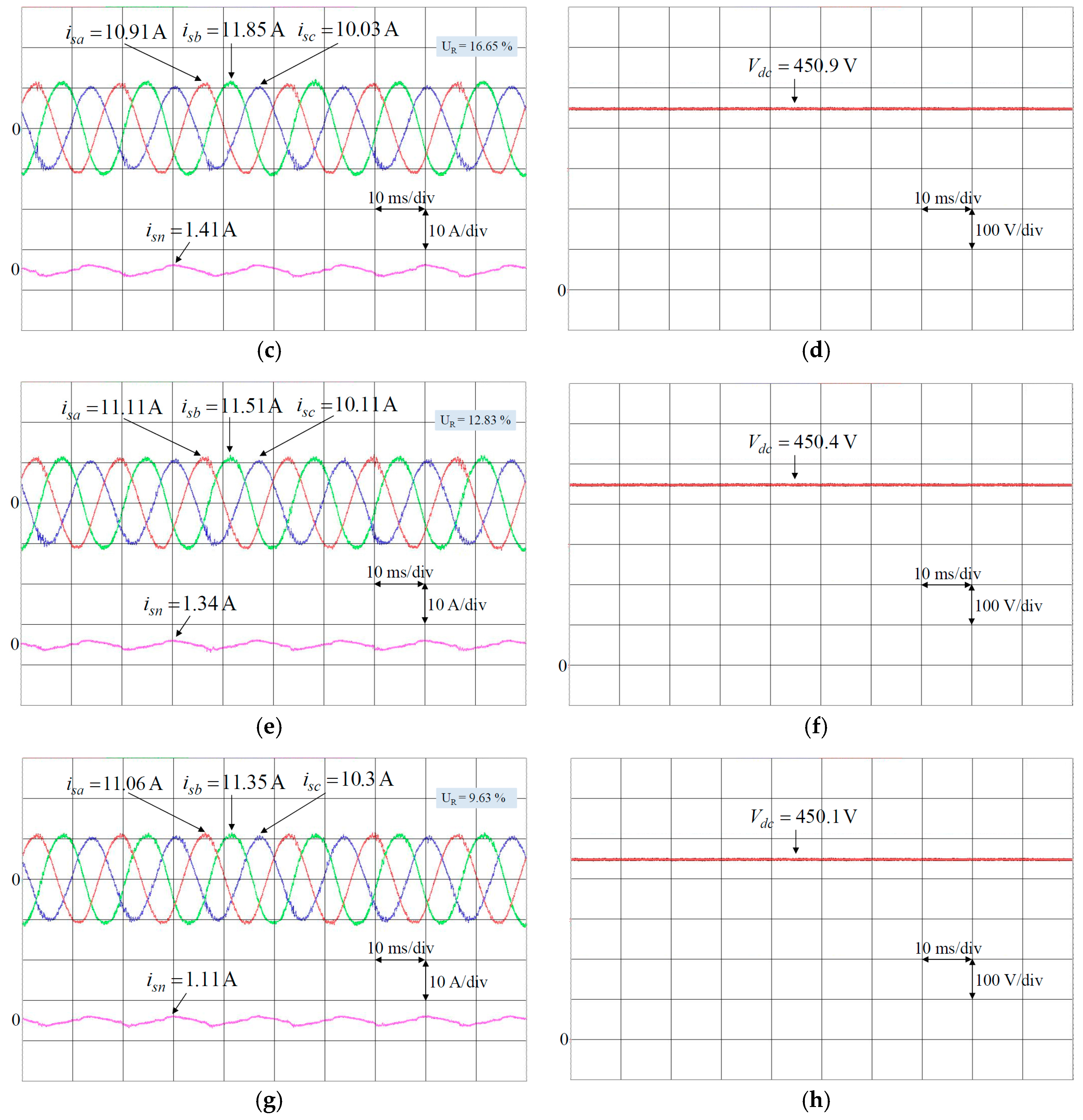
Figure 8e,f; the responses of the three-phase currents
isa,
isb,
isc and neutral current
isn and DC-link voltage
Vdc using the proposed PPFNN controlled shunt APF are shown in
Figure 8g,h. From the experimental results, the PI, PFNN and the proposed PPFNN controlled shunt APFs can make the three-phase currents
isa,
isb,
isc of the power grid be balanced, and the peak value of the neutral current
isn using PI, PFNN and the proposed PPFNN controlled shunt APF can be suppressed to be 1.41 A, 1.34 A and 1.11 A as shown in
Figure 8c,e,g. In addition, the unbalanced current ratio
UR using PI, PFNN and the proposed PPFNN controlled shunt APFs at the unbalanced load 3 under abnormal grid voltage are 16.65%, 12.83% and 9.63%, respectively. From the experimental results, though the shunt APF is operated under abnormal grid voltage, the compensation performance of the proposed PPFNN controlled shunt APF is still superior than the PI and PFNN controlled shunt APFs.
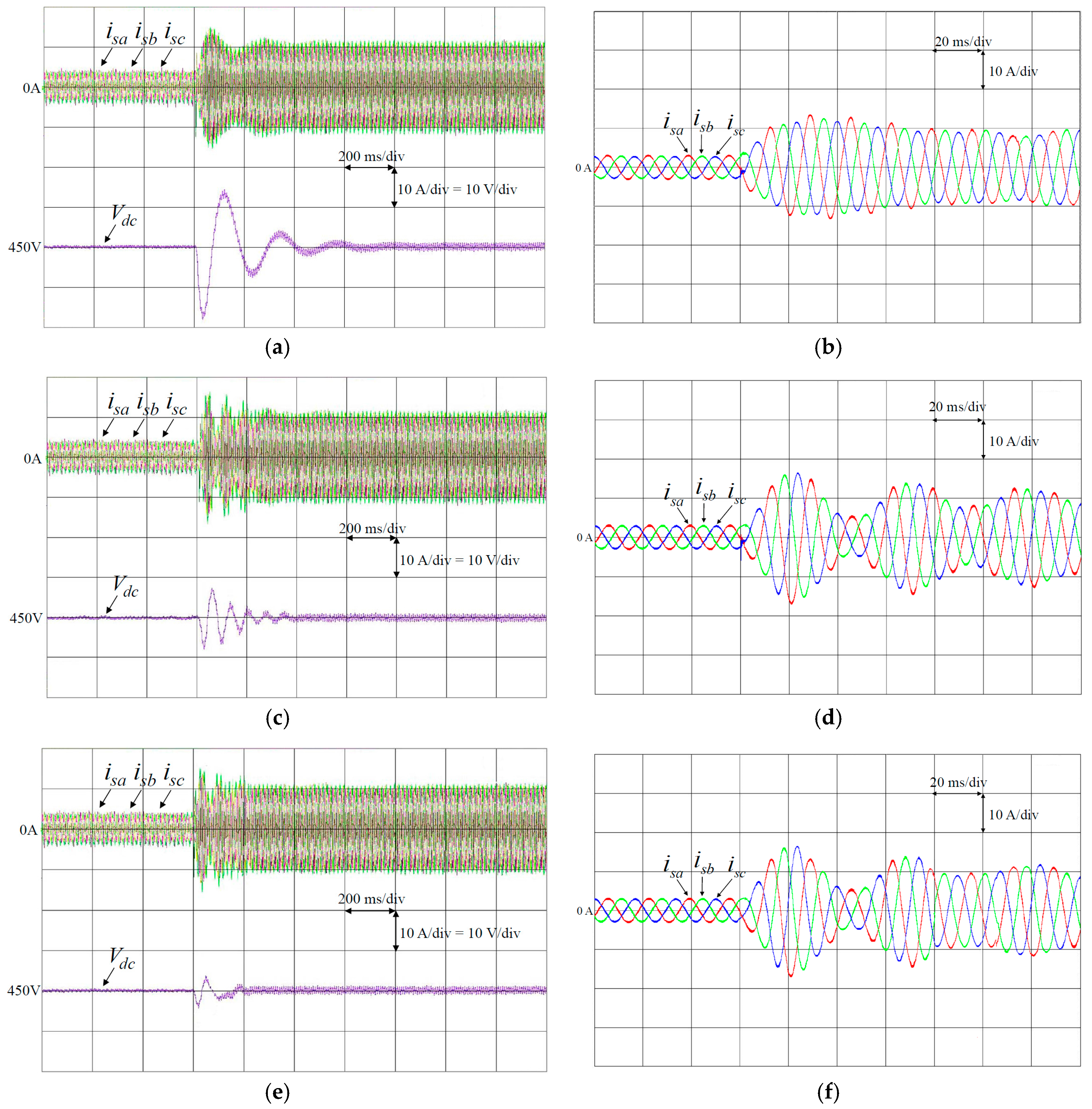
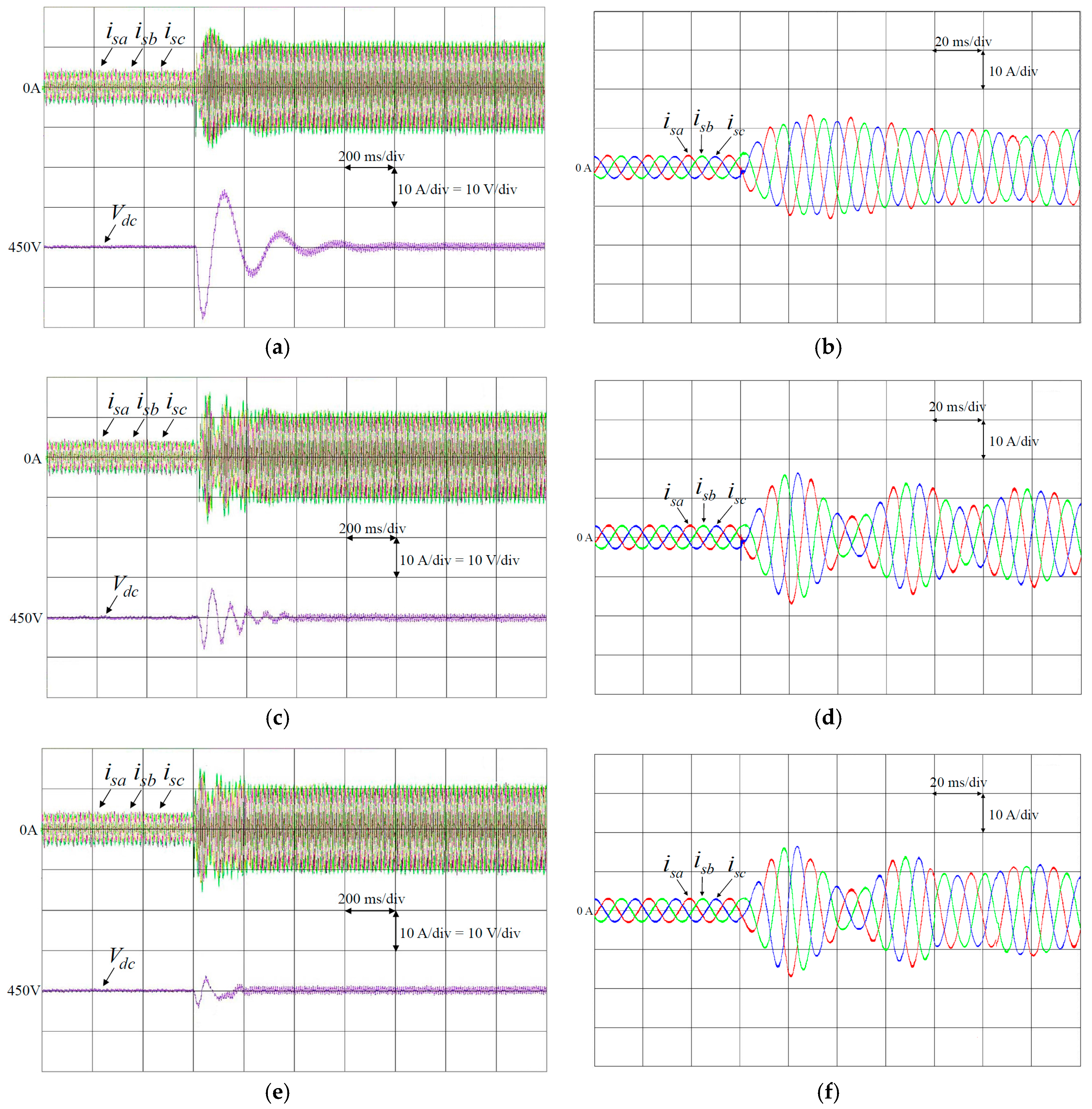
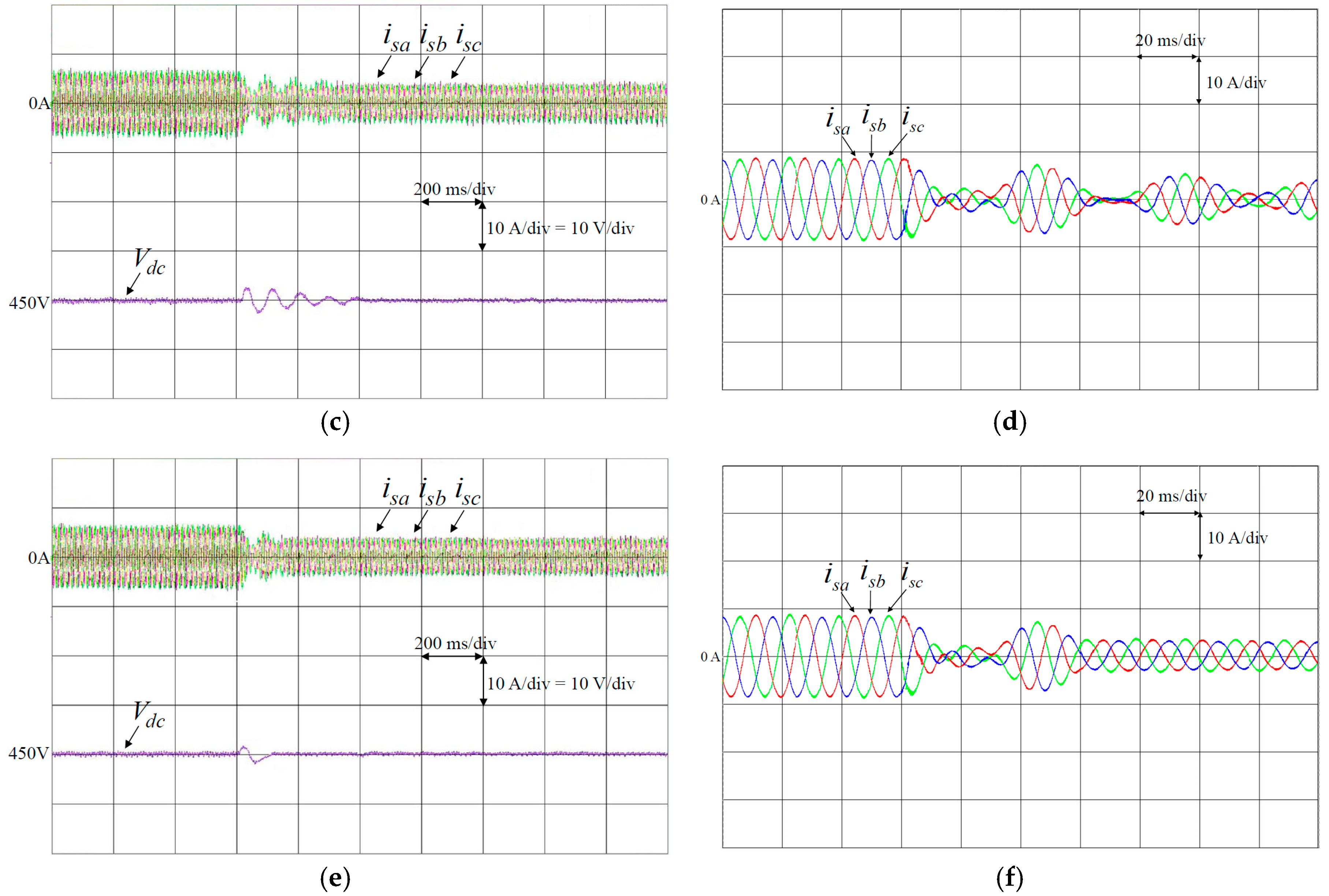
In order to verify the compensation performance and the regulation control of the DC-link voltage of the shunt APF under unbalanced load changing, two scenarios are designed as follows: (1) case 1, the load is changed from load 1 to load 3 at 0.6 s; (2) case 2, the load is changed from load 2 to load 1 at 0.6 s. First, the experimental results of PI, PFNN and the proposed PPFNN controlled shunt APF at case 1 are provided in
Figure 9. The responses of the three-phase currents
isa,
isb,
isc and DC-link voltage
Vdc using PI controlled shunt APF are shown in
Figure 9a. The responses of the three-phase currents
isa,
isb,
isc using PI controlled shunt APF in 0.54–0.74 s are shown in
Figure 9b. The responses of the three-phase currents
isa,
isb,
isc and DC-link voltage
Vdc using PFNN controlled shunt APF are shown in
Figure 9c. The responses of the three-phase currents
isa,
isb,
isc using PFNN controlled shunt APF in 0.54–0.74 s are shown in
Figure 9d. The responses of the three-phase currents
isa,
isb,
isc and DC-link voltage
Vdc using the proposed PPFNN controlled shunt APF are shown in
Figure 9e. The responses of the three-phase currents
isa,
isb,
isc using the proposed PPFNN controlled shunt APF in 0.54–0.74 s are shown in
Figure 9f. From the experimental results, the proposed PPFNN controlled shunt APF can reduce the transient and steady-state error of the DC-link voltage more rapidly as shown in
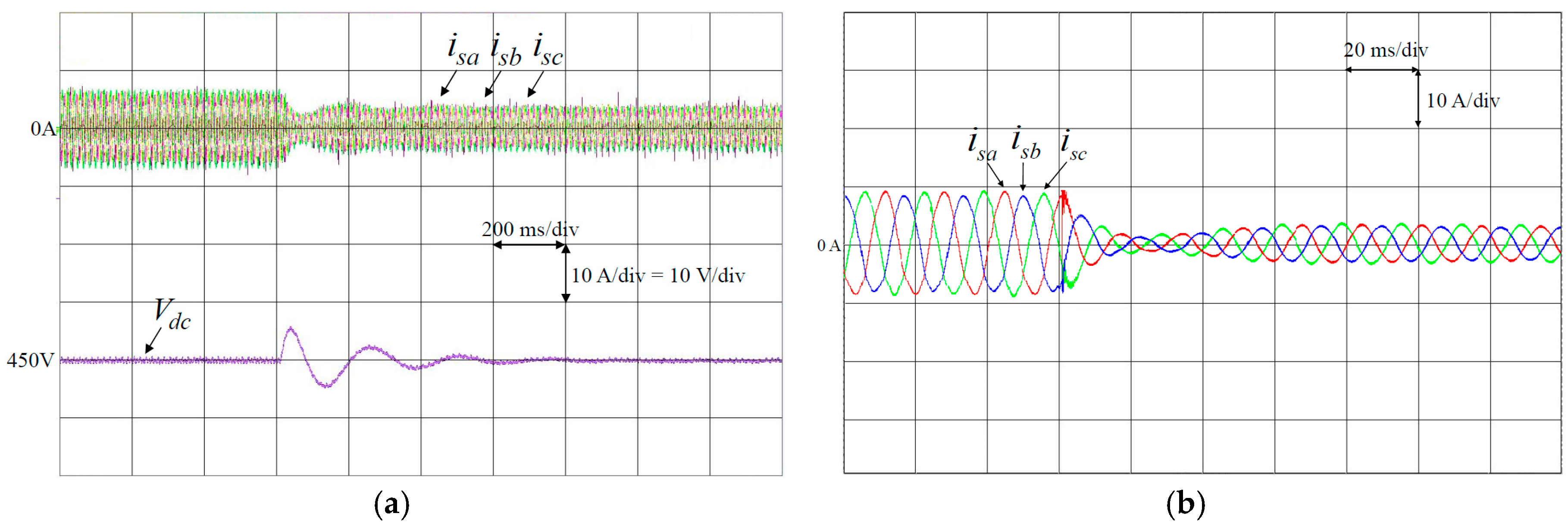
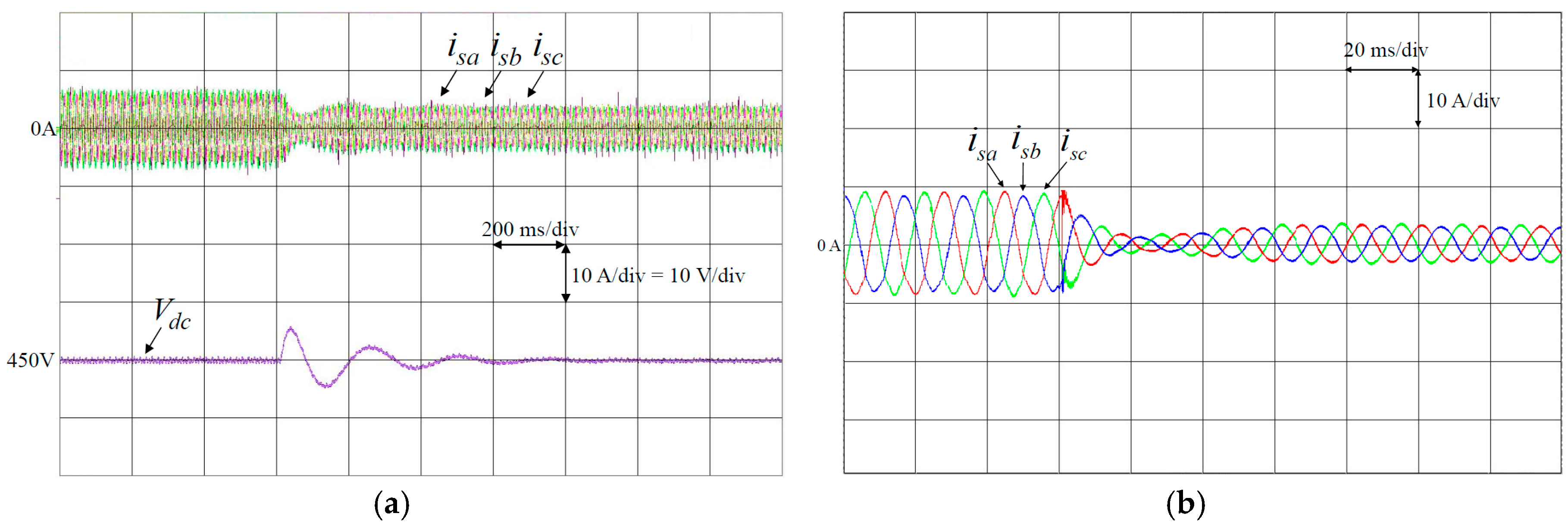
Figure 9e. Comparing with PI and PFNN controllers, since the proposed PPFNN controller owns fast convergence capability with robust, the excellent regulation control of the DC-link voltage and the compensation performance can be obtained by the proposed PPFNN controlled shunt APF. Moreover, the experimental results of PI, PFNN and the proposed PPFNN controlled shunt APF at case 2 are provided in
Figure 10. The responses of the three-phase currents
isa,
isb,
isc and DC-link voltage
Vdc using PI controlled shunt APF are shown in
Figure 10a. The responses of the three-phase currents
isa,
isb,
isc using PI controlled shunt APF in 0.54–0.74 s are shown in
Figure 10b. The responses of the three-phase currents
isa,
isb,
isc and DC-link voltage
Vdc using PFNN controlled shunt APF are shown in
Figure 10c. The responses of the three-phase currents
isa,
isb,
isc using PFNN controlled shunt APF in 0.54–0.74 s are shown in
Figure 10d. The responses of the three-phase currents
isa,
isb,
isc and DC-link voltage
Vdc using the proposed PPFNN controlled shunt APF are shown in
Figure 10e. The responses of the three-phase currents
isa,
isb,
isc using the proposed PPFNN controlled shunt APF in 0.54–0.74 s are shown in
Figure 10f. From the experimental results, the transient and steady-state responses of the DC-link voltage are also much improved as shown in
Figure 10e due to the powerful adaptive ability of the proposed PPFNN controlled shunt APF. Finally, a numerical performance comparison of the proposed PPFNN with PI and PFNN controllers is provided in
Table 2. The response time from the transient state to steady state of the DC-link voltage and the maximum DC-link voltage error from overshoot to undershoot in transient state using PI, PFNN and the proposed PPFNN controllers at cases 1 and 2 are shown in
Table 2. From
Table 2, the proposed PPFNN controlled shunt APF owns fast response time and less overshoot and undershoot. Therefore, the proposed PPFNN controlled shunt APF possesses excellent compensation and regulation performance.
The execution time of the “C” program in the TMS320F28335 32-bit floating-point DSP can be obtained by the clock tool of TEXAS INSTRUMENTS Code Composer Studio (CCS) v5 program editing interface. The execution time of the shunt APF using PI, PFNN and proposed PPFNN controllers are compared in
Table 3. As the result, the execution time of the shunt APF using the proposed PPFNN is still less than 1 ms which is the sampling interval of the control loop. Therefore, except the extra coding time for the shunt APF using proposed PPFNN controller, there is no extra hardware cost requirement for the implementation of the shunt APF using proposed PPFNN controller.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}