Environmental Health Oriented Optimal Temperature Control for Refrigeration Systems Based on a Fruit Fly Intelligent Algorithm


Abstract
:1. Introduction
2. System Description
2.1. Model Description
2.2. Control Problems
- Strong nonlinearity: Owing to the fact that the refrigeration system is a closed cycle, its elements are connected with diverse valves and pipes, this leads to the result of strong nonlinearity, which adds to the difficulty of dynamic modeling.
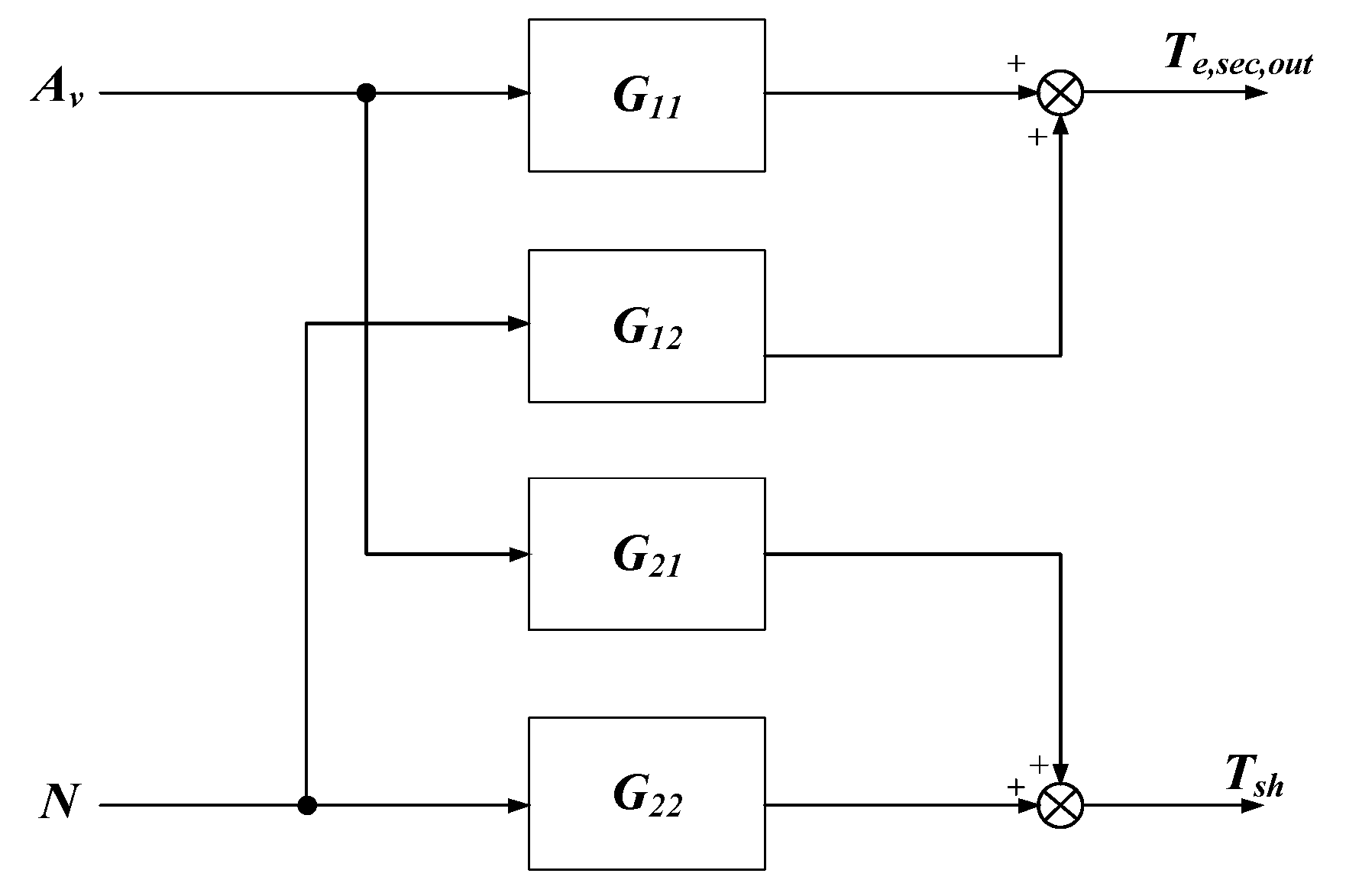
- High coupling: This makes the design of controller for this system complicated and challenging.
- Frequent disturbance: This requires the controller to have high robustness and be able to control the system efficiently and accurately to restrain the effect of the disturbance.
- Constrained control variables: The control variables in this paper is the condenser speed and the valve opening, and they are constrained between 30 Hz~50 Hz and 10~100%, respectively, and this may cause the problem of controller saturation.
3. Control Design
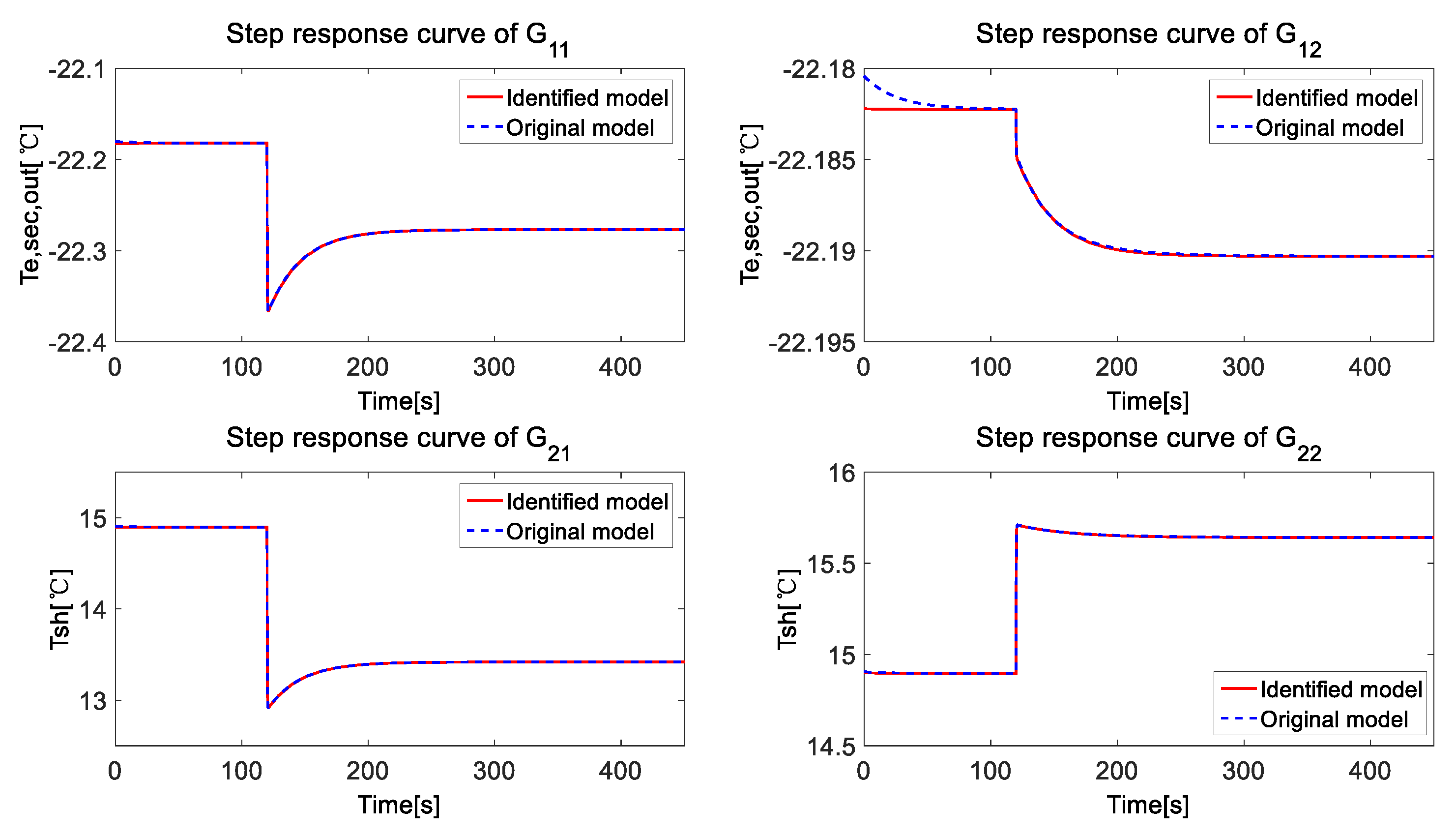
3.1. Transfer Function Identification
3.2. RGA Paring
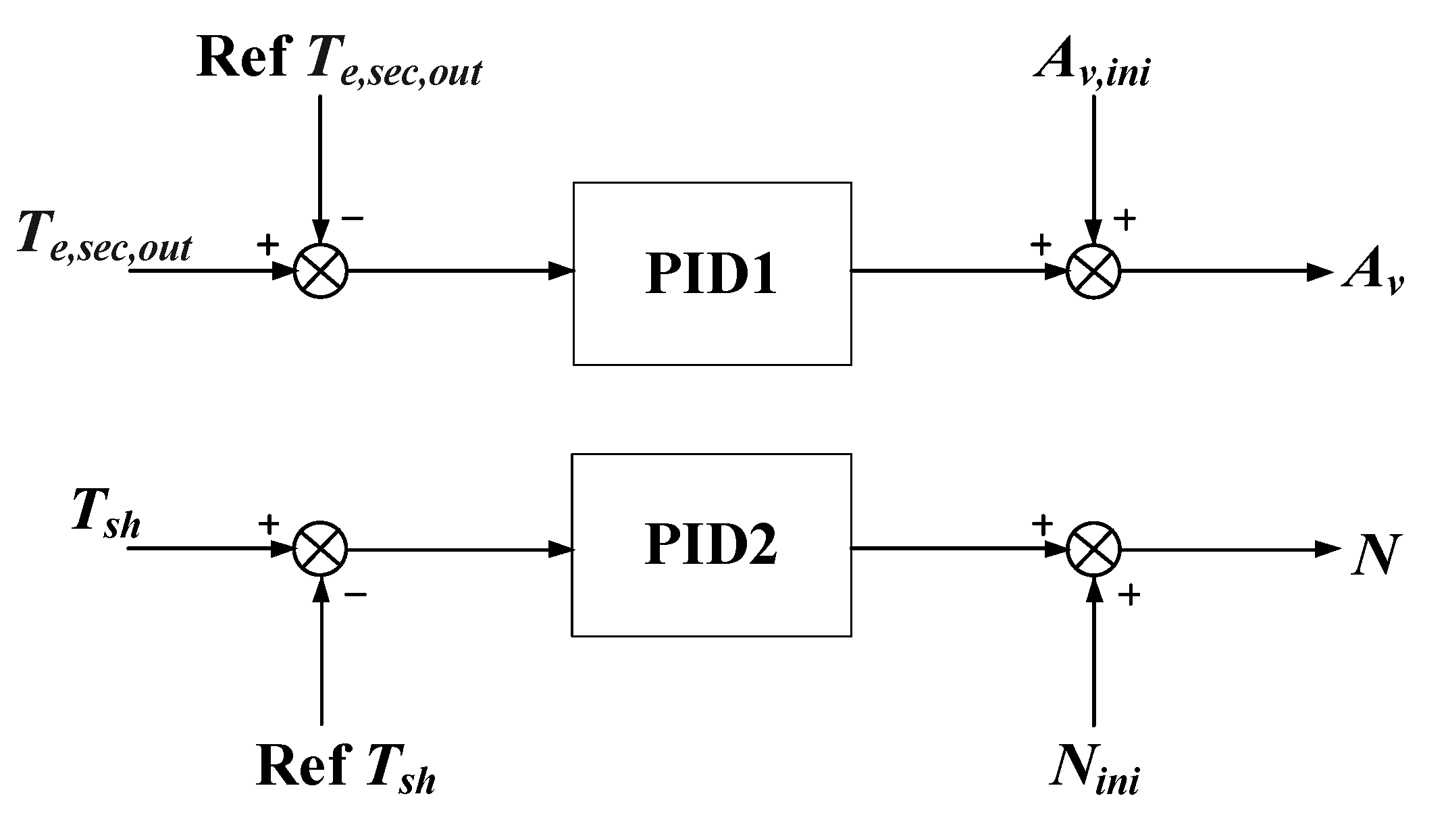
3.3. Controller Design
3.4. Controller Optimization
3.4.1. Introduction of Fruit Fly Optimization Algorithm (FOA)
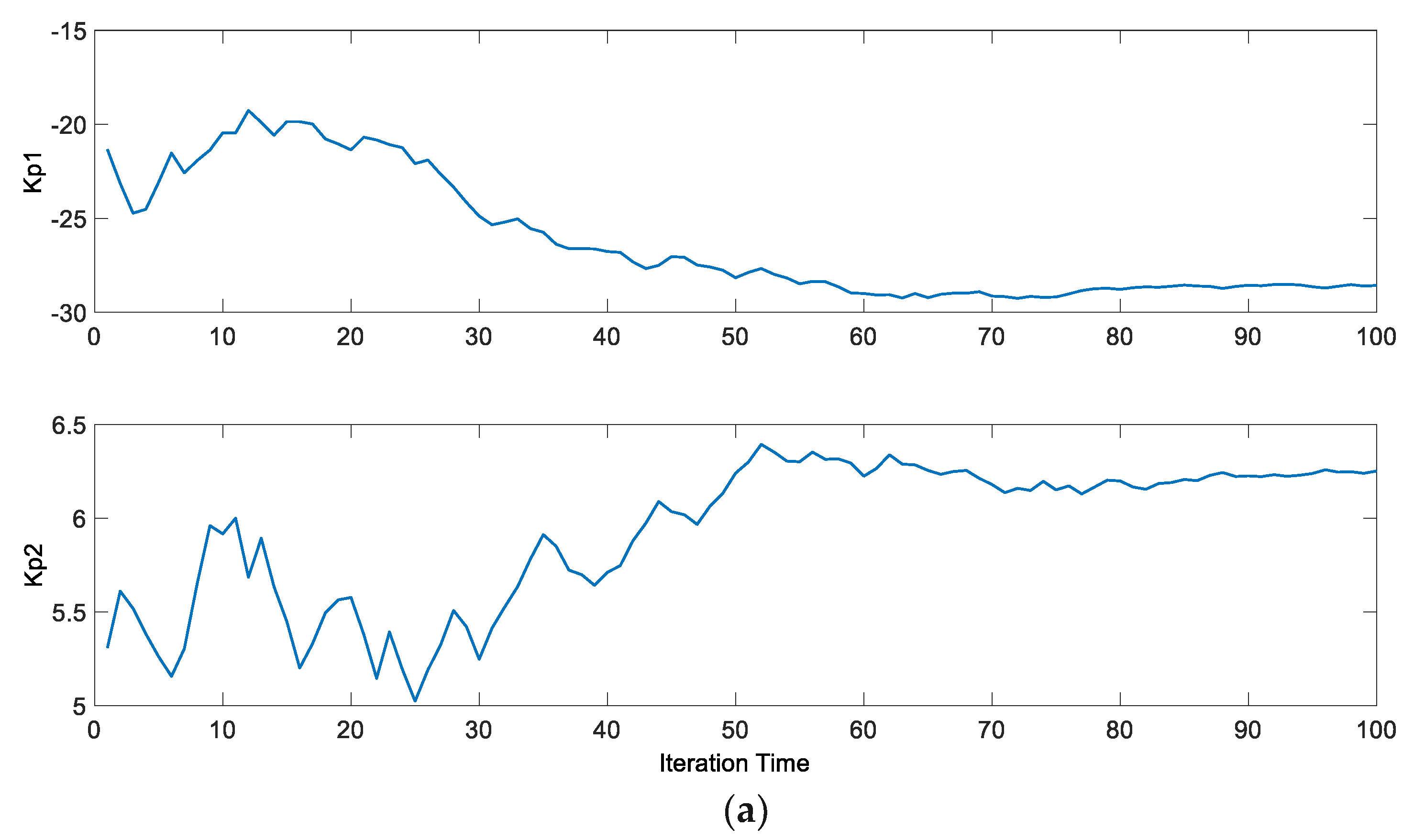
3.4.2. Tuning of PID Controllers Based on FOA
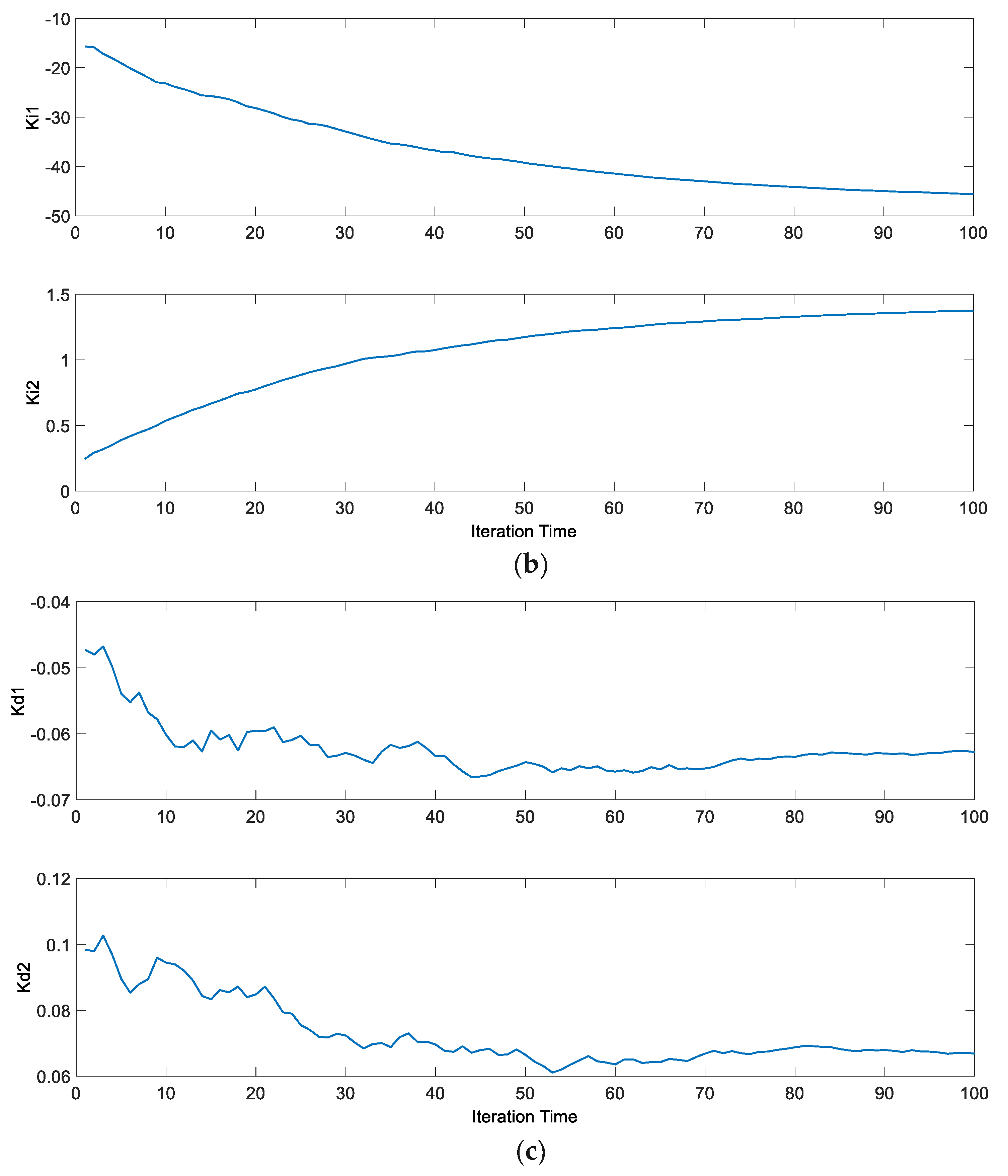
3.4.3. Optimization Result
4. Nonlinear Simulation
4.1. Simulation Result
4.2. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Dincer, I. Refrigeration Systems and Applications; Wiley: Chichester, UK, 2003. [Google Scholar]
- Bejarano, G.; Alfaya, J.A.; Rodríguez, D.; Ortega, M.G.; Morilla, F. Benchmark for PID control of Refrigeration Systems based on Vapour Compression. IFAC Pap. OnLine 2018, 51, 497–502. [Google Scholar] [CrossRef]
- Han, X.-S.; Dong, N.; Chang, J.-F. Energy saving method of refrigeration system based on model-free control algorithm. In Proceedings of the 6th Data Driven Control and Learning Systems (DDCLS), Chongqing, China, 26–27 May 2017. [Google Scholar] [CrossRef]
- Jahangeer, K.A.; Tay, A.A.O.; Raisul Islam, M. Numerical investigation of transfer coefficients of an evaporatively-cooled condenser. Appl. Therm. Eng. 2011, 31, 1655–1663. [Google Scholar] [CrossRef]
- Ruz, M.L.; Garrido, J.; Vazquez, F.; Morilla, F. A hybrid modeling approach for steady-state optimal operation of vapor compression refrigeration cycles. Appl. Therm. Eng. 2017, 120, 74–87. [Google Scholar] [CrossRef]
- Polzot, A.; D’Agaro, P.; Gullo, P.; Cortella, G. Modelling commercial refrigeration systems coupled with water storage to improve energy efficiency and perform heat recovery. Int. J. Refrig. 2016, 69, 313–323. [Google Scholar] [CrossRef]
- Ma, X.; Mao, R. Fuzzy Control of Cold Storage Refrigeration System with Dynamic Coupling Compensation. J. Control Sci. Eng. 2018, 2018, 6836129. [Google Scholar] [CrossRef]
- Bayram, K. Optimisation of Refrigeration System with Two-Stage and Intercooler Using Fuzzy Logic and Genetic Algorithm. Int. J. Eng. Appl. Sci. 2017, 9, 42–54. [Google Scholar] [CrossRef]
- Pedersen, T.S.; Nielsen, K.M.; Hindsborg, J.; Reichwald, P.; Vinther, K.; Izadi-Zamanabadi, R. Predictive Functional Control of Superheat in a Refrigeration System using a Neural Network Model. IFAC Pap. 2017, 50, 43–48. [Google Scholar] [CrossRef]
- Yin, X.; Li, S. Energy efficient predictive control for vapor compression refrigeration cycle systems. IEEE/CAA J. Autom. Sin. 2018, 5, 953–960. [Google Scholar] [CrossRef]
- Schalbart, P.; Leducq, D.; Alvarez, G. Ice-cream storage energy efficiency with model predictive control of a refrigeration system coupled to a PCM tank. Int. J. Refrig. 2015, 52, 140–150. [Google Scholar] [CrossRef]
- Ferramosca, A.; Limon, D.; Fele, F.; Camacho, E.F. L-Band SBQP-based MPC for supermarket refrigeration systems. In Proceedings of the European Control Conference (ECC), Budapest, Hungary, 23–26 August 2009. [Google Scholar] [CrossRef]
- Qin, Y.; Sun, L.; Hua, Q.; Liu, P. A Fuzzy Adaptive PID Controller Design for Fuel Cell Power Plant. Sustainability 2018, 10, 2438. [Google Scholar] [CrossRef]
- Sun, L.; Wu, G.; Xue, Y.; Shen, J.; Li, D. Coordinated Control Strategies for Fuel Cell Power Plant in a Microgrid. IEEE Transactions on Energy Conversion 2018, 33, 1–9. [Google Scholar] [CrossRef]
- Valerio, D.; da Costa, J.S. A review of tuning methods for fractional PIDs. In Proceedings of the 4th IFAC Workshop on Fractional Differentiation and its Applications (FDA), Badajoz, Spain, 18–20 October 2010. [Google Scholar]
- Pan, W.-T. A new Fruit Fly Optimization Algorithm: Taking the financial distress model as an example. Knowl. Based Syst. 2012, 26, 69–74. [Google Scholar] [CrossRef]
- Ren, S.; Zhichao, X.; Yang, L. Wireless Sensor Network Coverage Optimization Based on Fruit Fly Algorithm. Int. J. Online Eng. (IJOE) 2018, 14, 58–70. [Google Scholar] [CrossRef]
- Zheng, X.; Wang, L. A Collaborative Multiobjective Fruit Fly Optimization Algorithm for the Resource Constrained Unrelated Parallel Machine Green Scheduling Problem. IEEE Trans. Syst. Man Cybern. 2018, 48, 790–800. [Google Scholar] [CrossRef]
- Kanarachos, S.; Griffin, J.; Fitzpatrick, M.E. Efficient truss optimization using the contrast-based fruit fly optimization algorithm. Comput. Struct. 2017, 182, 137–148. [Google Scholar] [CrossRef]
- Han, J.; Wang, P.; Yang, X. Tuning of PID controller based on Fruit Fly Optimization Algorithm. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Mechatronics and Automation (ICMA), Chengdu, China, 5–8 August 2012. [Google Scholar] [CrossRef]
- McKinley, T.L.; Alleyne, A.G. An advanced nonlinear switched heat exchanger model for vapor compression cycles using the moving-boundary method. Int. J. Refrig. 2008, 31, 1253–1264. [Google Scholar] [CrossRef]
- Li, B.; Alleyne, A.G. A dynamic model of a vapor compression cycle with shut-down and start-up operations. Int. J. Refrig. 2010, 33, 538–552. [Google Scholar] [CrossRef]
- Sun, L.; Hua, Q.; Li, D. Direct energy balance based active disturbance rejection control for coal-fired power plant. ISA transactions. 2017, 70, 486–493. [Google Scholar] [CrossRef]
- Skogestad, S.; Postlethwaite, I. Multivariable Feedback Control: Analysis and Design, 2nd ed.; John Wiley: Chichester, UK; Hoboken, NJ, USA, 2005. [Google Scholar]
- Sun, L.; Li, D.; Lee, K.Y. Optimal disturbance rejection for PI controller with constraints on relative delay margin. ISA Trans. 2016, 63, 103–111. [Google Scholar] [CrossRef]
- Jin, Y.; Sun, L.; Hua, Q.; Chen, S. Experimental Research on Heat Exchanger Control Based on Hybrid Time and Frequency Domain Identification. Sustainability 2018, 10, 2667. [Google Scholar] [CrossRef]
- Sun, L.; Shen, J.; Hua, Q.; Lee, K.Y. Data-driven oxygen excess ratio control for proton exchange membrane fuel cell. Appl. Energy 2018, 231, 866–875. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Description | Range | Initial Value | Units |
|---|---|---|---|---|
| Av | The valve opening | [10~100] | 50 | % |
| N | The compressor speed | [30~50] | 40 | Hz |
| Tc,sec,in | Inlet temperature of the condenser secondary flux | [27~33] | 30 | °C |
| Mass flow of the condenser secondary flux | [125~175] | 150 | g·s−1 | |
| Pc,sec,in | Inlet pressure of the condenser secondary flux | -- | 1 | bar |
| Te,sec,in | Inlet temperature of the evaporator secondary flux | [−22~−18] | −20 | °C |
| Mass flow of the evaporator secondary flux | [0.0075~0.055] | 64.503 | g·s−1 | |
| Pe,sec,in | Inlet pressure of the evaporator secondary flux | -- | 1 | bar |
| Tsurr | Compressor surroundings temperature | [20~30] | 25 | °C |
| Te,sec,out | The outlet temperature of the evaporator secondary flux | [−22.1~−22.6] | −22.1 | °C |
| Tsh | The degree of superheating | [7.2~22.2] | 14.65 | °C |
| (a) | ||||
| Controller 1 | Controller 2 | |||
| Number | Overshoot (%) | Settling Time (s) | Overshoot (%) | Settling Time (s) |
| 1 | 0 | 49.02 | 0 | 19.02 |
| 2 | −0.26 | 169.20 | 0 | 19.98 |
| 3 | 0.44 | 91.21 | 0 | 4.20 |
| (b) | ||||
| Controller 1 | Controller 2 | |||
| Number | Overshoot (%) | Settling Time (s) | Overshoot (%) | Settling Time (s) |
| 1 | −3.14 | 112.23 | 0 | 22.98 |
| 2 | 3.11 | 150.04 | 0.68 | 120.18 |
| 3 | −11.24 | 139.20 | 0 | 43.01 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, Y.; Sun, L.; Hua, Q. Environmental Health Oriented Optimal Temperature Control for Refrigeration Systems Based on a Fruit Fly Intelligent Algorithm. Int. J. Environ. Res. Public Health 2018, 15, 2865. https://doi.org/10.3390/ijerph15122865
Qin Y, Sun L, Hua Q. Environmental Health Oriented Optimal Temperature Control for Refrigeration Systems Based on a Fruit Fly Intelligent Algorithm. International Journal of Environmental Research and Public Health. 2018; 15(12):2865. https://doi.org/10.3390/ijerph15122865
Chicago/Turabian StyleQin, Yuxiao, Li Sun, and Qingsong Hua. 2018. "Environmental Health Oriented Optimal Temperature Control for Refrigeration Systems Based on a Fruit Fly Intelligent Algorithm" International Journal of Environmental Research and Public Health 15, no. 12: 2865. https://doi.org/10.3390/ijerph15122865