1. Introduction
Wireless sensor networks (WSNs) are an interesting research topic, both in military [
1–
3] and civilian scenarios [
4]. In particular, remote/environmental monitoring, surveillance of reserved areas, etc., are important fields of application of WSNs. These applications often require very low power consumption and low-cost hardware [
5]. One of the most common standards for wireless networking with low transmission rate and high energy efficiency has been proposed by the Zigbee Alliance [
6]. In this context, an interesting research direction for WSNs is the design of network architectures that can guarantee high energy efficiency. In particular, since the overall energy available in a WSN is typically limited (all nodes are battery-equipped), the research community has focused on the derivation of transmit power allocation strategies that maximize a specific performance indicator yet still guarantee high energy savings.
In [
7], the authors compare three power control schemes by analyzing the received signal-to-noise ratio in dense relay networks. In particular, one of these opportunistic schemes aims at extending the lifetime of the relays, in order to maximize the lifetime of the entire network. In [
8], the authors introduce a power allocation scheme that minimizes the estimation mean-square error at the fusion center of a network where sensors transmit to the fusion center over noisy wireless links. In [
9], the authors jointly optimize the data source quantization at each sensor, the routing scheme and the power control strategy in a WSN in order to derive an efficient solution for the problem of overall network optimization. Finally, in [
10] the authors present an opportunistic power allocation strategy based on local and decentralized estimation of the links’ quality. In this scenario, only the nodes that experience channel conditions above a specific quality threshold are allowed to transmit in order to avoid waste of energy. In [
11], the authors introduce a dynamic power allocation scheme for WSNs which relates the received signal strength indicator (RSSI) to the received signal-to-interference plus noise ratio (SINR). In particular, they propose two possible approaches: (i) a first approach based on a Markov chain system characterization and (ii) a second approach based on the minimization of the average packet error rate (PER).
In this paper, we propose an innovative transmit power control scheme for Zigbee WSNs based on optimization theory. This approach relies on the assumptions of (i) low traffic load and (ii) finite overall network transmit power, and it aims at the minimization of the PER at the access point (AP). Modeling the carrier sense multiple access with collision avoidance (CSMA/CA) medium access control (MAC) protocol through a finite state machine, it is possible to allocate the transmit powers at the sensors in order to maximize the number of 1’s of the adjacency matrix, i.e., the number of active pairwise connections between the nodes in the network — a 0 in an entry of the adjacency matrix indicates that the nodes corresponding to the row and the column are not connected. In all cases, we will assume that the sensors transmit directly to the AP. The proposed optimization approach will guarantee a lower PER than that in a scenario where all nodes transmit at the same power, yet still guarantee relevant energy savings.
The structure of this paper is the following. In Section 2., the analytical model, upon which this work is based, is presented. A simplified model is then derived, together with the network lifetime characterization and the optimized transmit power allocation strategy. In Section 3., the Zigbee standard and its implementation in the Opnet simulator are described. In Section 4., the performance, in terms of PER, delay and network lifetime, is presented, focusing on the impact of the adjacency matrix structure, the traffic load and the used power allocation strategy. Finally, Section 5. concludes this paper.
2. Analytical Model
2.1. Definition of a Simplified Model for Zigbee WSNs
In the following, we first introduce some key parameters of a Zigbee WSN. Then, we present a simplified version of its MAC protocol and under the assumption of low traffic load, we propose a simplified analytical model for the estimation of the following main network performance indicators: PER at the AP and average delay.
First of all, each sensor node is characterized by two main parameters: (i) its position on a two-dimensional plane and (ii) its transmit power, as stated in the following definition (for the sake of simplicity, we will simply use the term “sensor” to refer to a wireless node with sensing capabilities).
Definition 1 A sensor is represented by a couple s = (x, P), where x ∈ 2 is the sensor position and P ∈ is its transmit power.
We remark that the previous definition is based on the assumption that the positions of the nodes are known. This is realistic in several practical applications, such as industrial or home monitoring, where the spatial distribution of the nodes is a priori determined. In more general scenarios, the positions of the nodes could be unknown. In such case, one should also consider proper localization algorithms. However, once the positions of the nodes are estimated, our framework for optimized transmit power control can be directly applied.
We assume that the detection operation is described by an ideal threshold model, as stated in the following assumption.
Assumption 1 (Threshold reception) Given two sensors s1 = (
x1,
P1)
and s2 = (
x2,
P2),
there exists a minimum power function Π(
x1,
x2)
such that sensor s2 receives the transmission of sensor s1 if and only if This assumption holds because of propagation loss (according to the Friis formula) and assumes that a threshold detector is used at the receiver [
12]. In fact, in this case the power
Pr received by sensor
s2 can be expressed as:
where
Gt and
Gr are the gains of the transmit and receive antennas,
r is the distance, λ is the wavelength, and
α is the path loss exponent. According to the ideal threshold detector model, sensor
s2 receives a transmission from sensor
s1 if and only if
Pr > Pmin, where
Pmin is the (pre-defined) receiver reception threshold. In this case,
A sensor network can be introduced as a set of sensors, characterized by their positions and their transmit powers, together with an associated minimum power function.
Definition 2 A sensor network of N elements is an ordered set = (c, Π, s1, s2, . . ., sN), where s1, s2, . . ., sN are sensors, c ∈ 2 is the position of the AP, and Π : 2 ×2 → is the associated minimum power function.
Definition 3 (Adjacency matrix) Given a sensor network = (
c, Π,
s1,
s2, . . .,
sN),
with si = (
xi,
Pi),
i = 1, . . .,
N, its associated adjacency matrix
is given bywhereThe complement of A() corresponds to The number of ones in the adjacency matrix is given by the adjacency of sensor network and denoted by |A()|. The complementary adjacency is given by the number of zeros in the adjacency matrix and denoted by |Ā()|.
For each i = 1, . . .,
N, we define the following two sets:which represent the sets of indices of the sensors that si can receive from and transmit to, respectively. We denote by ̄i and ̄i the complements of these two sets. In order to make the theoretical analysis feasible, a Zigbee WSN is described by the following simplified model.
Assumption 2 (Simplified model)
Poisson generation: the traffic generated by each sensor in the network is modeled as a homogeneous Poisson process [13]. The processes associated with different sensors are independent of each other and have intensity g (dimension: [pck/s]) [14]. Limited CCA: before transmission, the i-th sensor waits for a random backoff time, with average TB1 (dimension: [s]), and then checks if the channel is clear. This clear channel assessment (CCA) is limited only to those sensors whose indices lie in the set i. In other words, the sensing is limited only to those sensors that can effectively (i.e., with sufficiently high received power) transmit to the i-th sensor. The CCA has a duration equal to TCCA.
Infinite number of backoffs: if the channel is found busy, the current sensor transmission is delayed by a random backoff time with average TB2 (dimension: [s]). During the backoff period the traffic generation at the transmitting sensor does not stop. There is no limit on the total number of subsequent backoffs that a single packet transmission can incur.
Constant transmission length: each transmission has the same length Ttrans = L/R, where L is the packet length (dimension: [b/pck]) and R is the transmission data rate (dimension: [b/s]).
Transmission turnaround time: after sensing, if the channel is found idle, each sensor waits a turnaround time, denoted as TTAT (dimension: [s]), before starting its transmission.
For each sensor si (i = 1, . . ., N) the following counting processes can be defined.
Gi(t): the number of times that sensor si has checked if the channel is clear in the time interval [0, t].
Bi(t): the number of times that a packet transmission of sensor si has been delayed, through the backoff mechanism, in [0, t].
Ti(t): the number of times that a sensor si has transmitted in [0, t] (counting both successful and unsuccessful transmissions).
Ei(t): the number of transmission errors incurred by sensor Si in [0, t].
For a counting process
P(
t), define the steady state intensity as follows:
where 𝔼[·] denotes expectation. We recall that for the stationary Poisson traffic generation processes, the steady state intensity is constant and denoted by
g. In the following, we assume that the limit at the righthand side of
Equation 2 exists for all previously defined counting processes: this is equivalent to assuming that the network reaches a “steady state.” Under this hypothesis, the following equilibrium conditions must be satisfied:
Equation 3 states that, at steady state, the intensity of transmissions must be equal to the intensity of traffic generation.
Equation 4 states that, at steady state, the intensity of channel sensing has to be equal to the sum of the intensities of packet generations and backoffs.
The backoff traffic intensity can be expressed as follows:
where
χi represents the ratio between the numbers of backoffs and transmission attempts. In this way, the processes {
Ti(
t)} and {
Bi(
t)} satisfy the following relations:
The term χi can be equivalently interpreted as the probability, for the ith sensor, to assess that the channel is busy during the CCA. In order to derive a simple expression for χi, it is assumed that the processes {Ti(t)} are uncorrelated and Poisson. This simplification is appropriate under low traffic conditions. In fact, in this case, F[Bi] << g and the processes {Ti(t)} are statistically very similar to Poisson traffic generation processes. However, as it will be shown in Section 4., the estimated PER obtained with these simplifications is close to that predicted by (realistic) simulations also under relatively high traffic conditions.
Under the above simplifications,
χi equals the probability of finding at least one packet transmission event, during a time interval equal to the transmission length
Ttrans, in the set of independent Poisson processes {
Gj(
t)}
j∈i. In other words, one can write:
In order to compute
χi, it is worth remarking that the probability of finding no packet transmissions from the
ith sensor in a time interval of length
Ttrans is given by
e−F[Ti]Ttrans. Since the process
Ti is assumed to be Poisson and uncorrelated from the other {
Tj}
j≠i, the probability of finding no transmission events from the sensors belonging to
i (i.e., those sensors that can be received by the
ith sensor) in
Ttrans is given by
In conclusion, the probability of finding at least one packet transmission event in a time interval equal to
Ttrans from any of the sensors that can be received by the
ith sensor is given by
Therefore,
χi can finally be expressed as follows:
where we have used
Equation 3 and approximated Π
j∈i (1 −
e−gTtrans) with ∑
j∈i gTtrans. The latter simplification holds under low traffic conditions, where
gTtrans << 1. The notation |
i| stands for the number of elements of the set
i. From
Equation 7, using the approximations 1/(1 −
χi) ≃ 1 +
χi and
χi/(1 −
χi) ≃
χi, that hold for small values of
χi, the following simplified expressions for network sensing and backoff intensities can then be obtained:
In general, the number of transmission errors accumulated by sensor
si can be written in the following form:
where the four terms at the righthand side can be characterized as follows. The term
γiF[
Gi] represents the intensity of transmission errors occurred due to the occupation of channel by a packet transmission that could not be detected by the
ith sensor during a CCA interval. The term λ
iF[
Ti] represents the intensity of transmission errors due to interference from other sensors that cannot receive
si. The term
ηiF[
Ti] represents the intensity of transmission errors resulted from another sensor beginning to transmit when
si is waiting the turnaround time between the CCA and the transmission act. Finally, the term
κiF[
Ti] represents the intensity of transmission errors due to the fact that other sensors can begin transmission in the first subinterval, of length
TTAT, of a transmission act from sensor
si. In fact, if some other sensor begins transmission during the turnaround time, it cannot detect the previous starting instant of a transmission by
si. The last two terms appearing in
Equation 8 take into account the transmission errors independent of the network connectivity and are significant in the overall network error analysis.
Under the assumption of low traffic load and with the simplification that all relevant processes are Poisson and independent, the coefficient
γi in
Equation 8 can be approximated as follows:
Similarly, the coefficient λ
i in
Equation 8 can be approximated as
The coefficient
ηi in
Equation 8 can be approximated as
Finally, the coefficient
ki in
Equation 8 is given by
Using the expressions found above for the coefficients
γi,
λi,
ηi and
κi in
Equation 8, the transmission error intensity can be approximated as
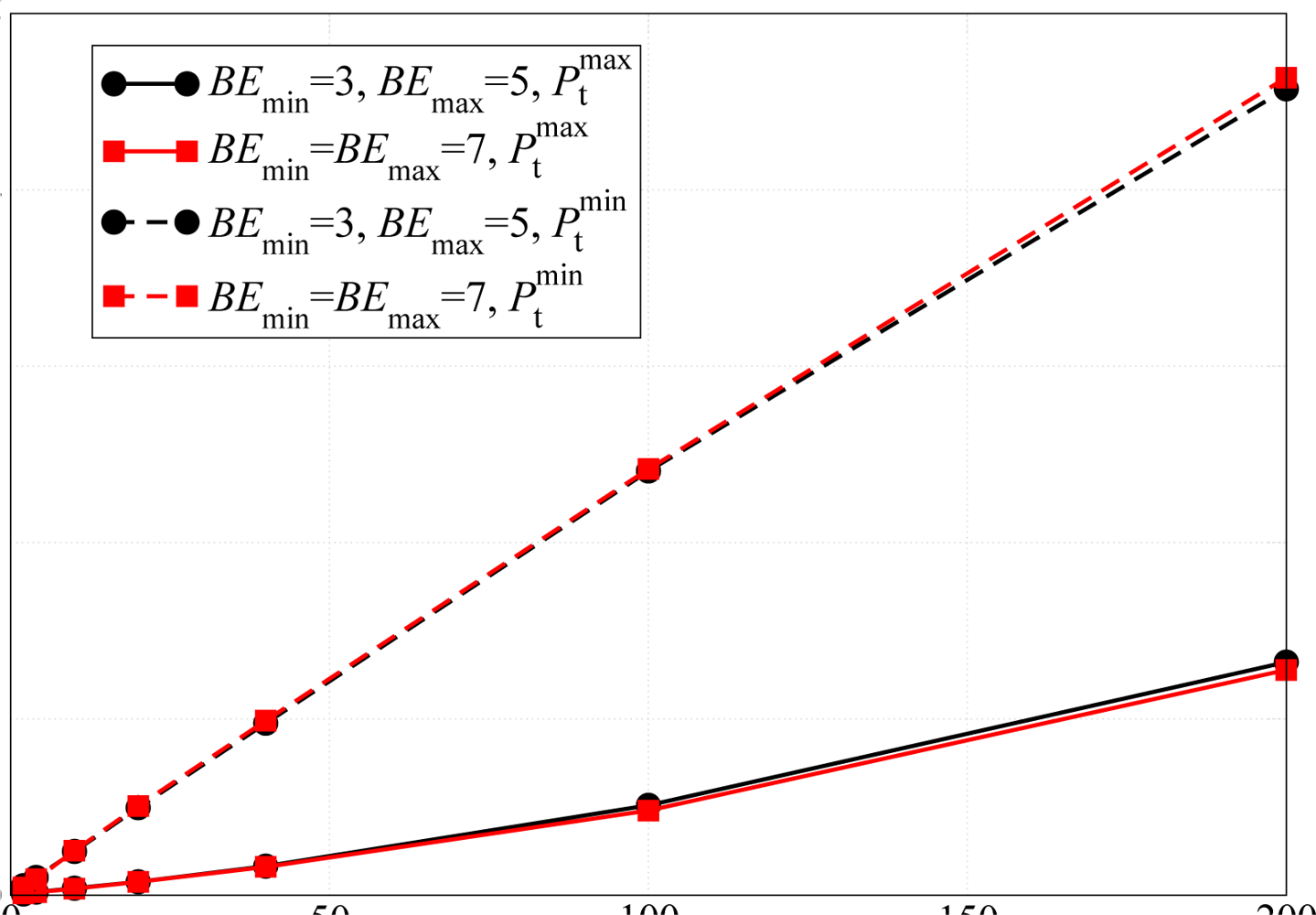
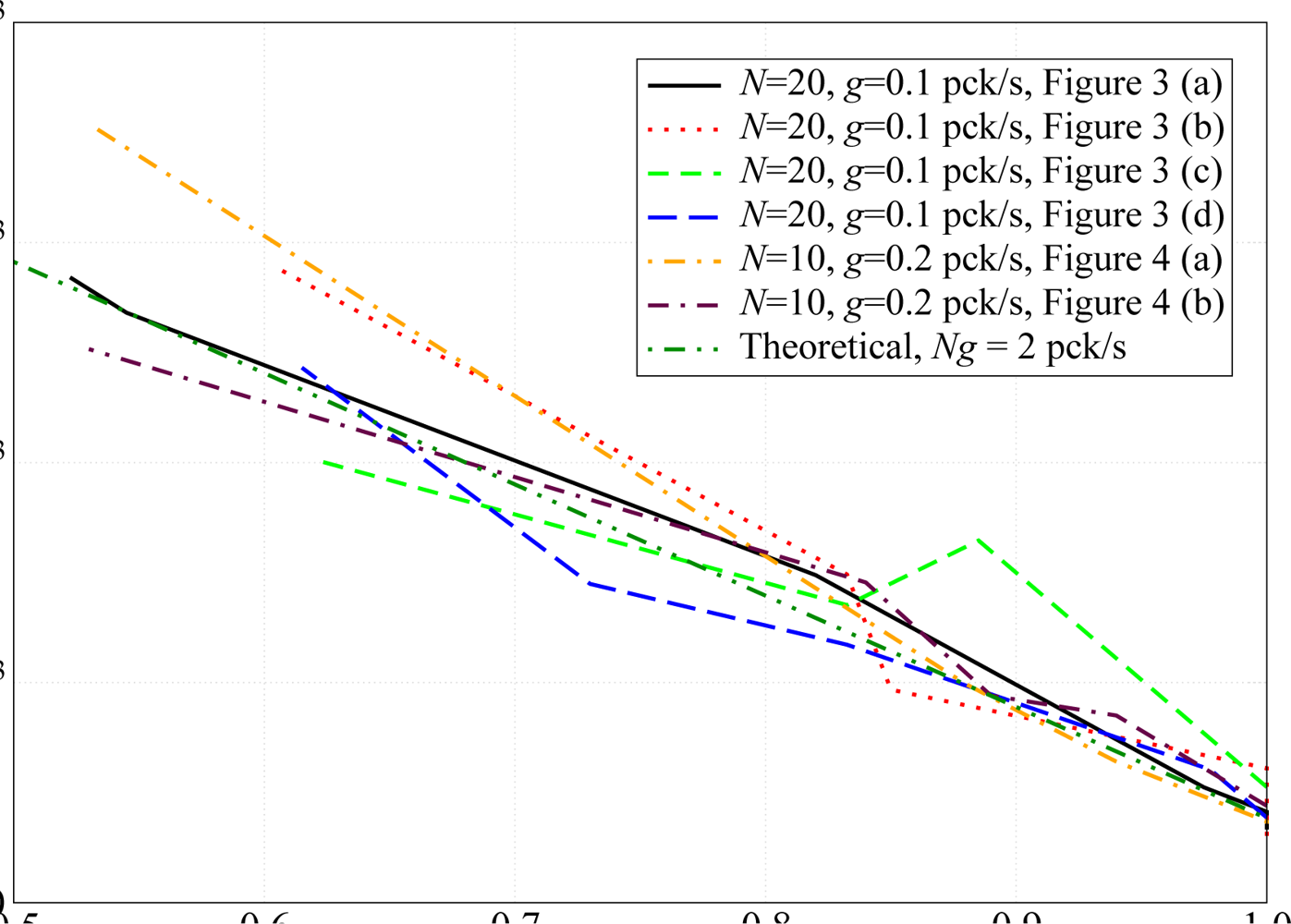
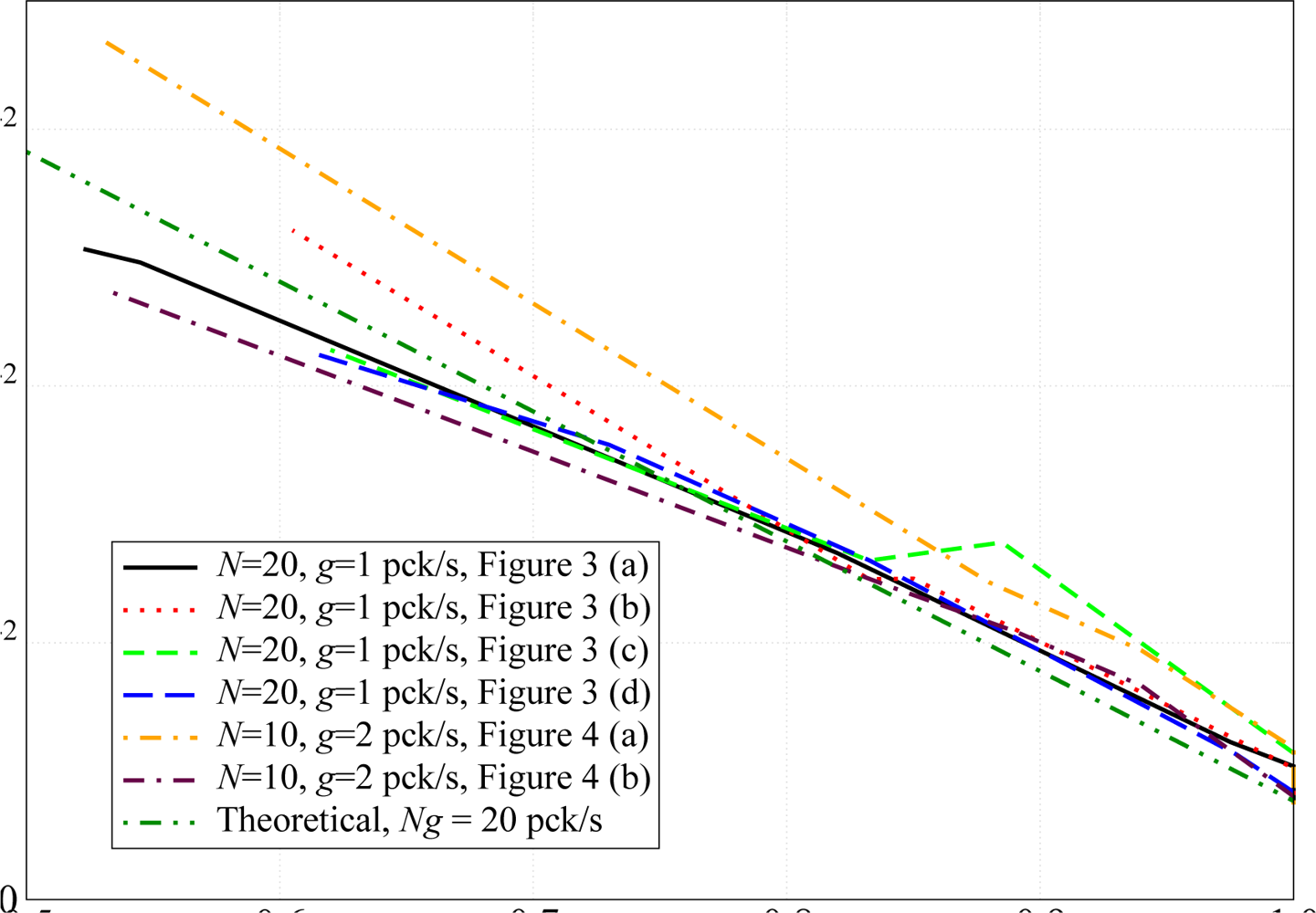
Therefore, the overall network error intensity can be estimated as follows:
and the error probability, i.e., the ratio between the overall network error intensity and the generation intensity (given by
Ng), becomes
Equation 9 shows that, under the considered simplifying assumptions, the error probability grows linearly with the network complementary adjacency |
Ā(
)|.
In the following, we find an estimate of the average network delay. First of all, we remark that if, after the first backoff, the channel is found idle, the total delay is given by
This is the minimum average delay that a packet incurs if the channel is found idle at the first transmission attempt. If the channel is found busy, the sensor waits for a backoff time with average T
B2, then senses the channel again. If, taking into account the second transmission attempt, the channel is found idle for the second time, the overall delay can be expressed as
Dmin +
DBO, where
Under the low traffic load assumption, the probability of having more than one backoff during a single transmission act is negligible. Therefore, the average transmission delay becomes
where
DBO is the average backoff time. The average network delay can then be expressed as
Equation 10 for the delay shows that the network delay depends linearly on the network adjacency. We remark that, since we considered star topologies, the PER and delay statistics collected at each node are less significant than those calculated at the AP, which instead provide a better description of the network behavior. Should more complicated topologies be considered, the proper metrics need to be taken into account.
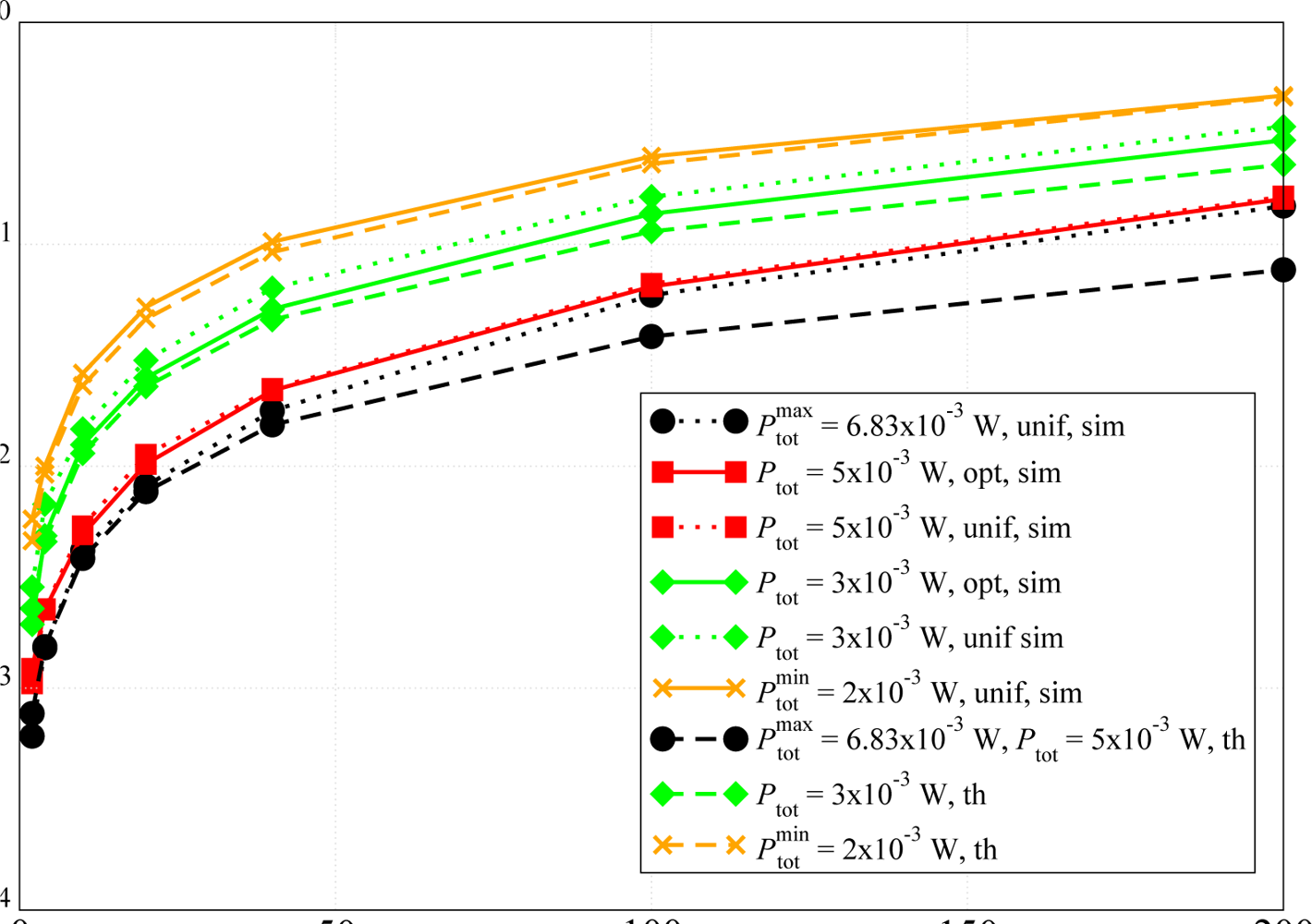
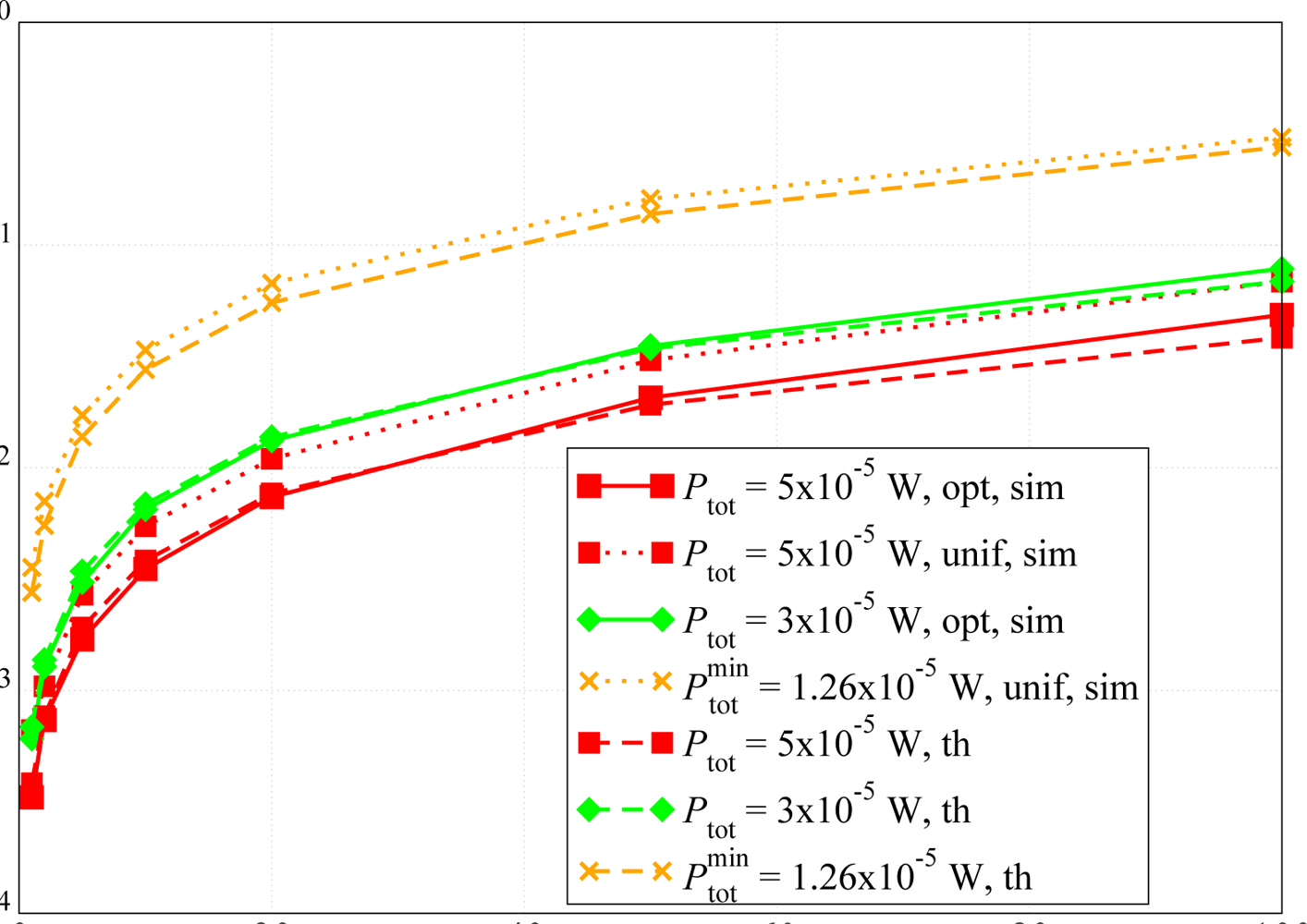
In conclusion, under the low traffic load assumption, the PER and the delay at the AP of a WSN can be estimated as follows:
2.2. Network Lifetime
An important parameter for a WSN is the network lifetime. This performance indicator can be interpreted in several ways. For example, in [
11] the network lifetime is defined as the time interval at the end of which the probability of outage falls below a maximum value than can be tolerated, on average, over the transmission links before the network is declared dead. In particular, the network degradation (i.e., the increase of the probability of outage) is assumed to be caused by fading and battery depletion. In [
15], the network lifetime is related to the minimum number of sensors that need to be active before declaring the network dead. More precisely, when the number of active nodes drops to below this minimum number due to battery depletion, the network dies.
In this paper, the network lifetime is defined similarly to that proposed in [
15]. More precisely, since this paper focuses on power control, i.e., minimization of the total transmit power for a given PER, we consider a definition of network lifetime based on the overall residual energy in the network. If the overall residual energy at time
t, denoted as
Eres−net(
t) is higher than a pre-defined threshold, which may depend on a required network operational quality of service (QoS), then the network is declared alive. On the other hand, if the residual energy becomes lower than this threshold, then the network is declared dead.
The network residual energy at time
t can be expressed as:
where
EI−node is the initial per-node energy and
Econs−net(
t) is the average energy consumed, at network level, up to time
t. In order to evaluate
Econs−net(
t), one can write:
where
Pcons−net is the average network-level consumed power and
Pcons−node is the average consumed power at each node. When the proposed power allocation strategy is used, the consumed power at each sensor is different. However, in order to simplify the analytical model, we consider the average network-wide power consumed, then we derive the average power consumed at each node. At this point, the evaluation of the average network residual energy at any instant reduces to the evaluation of
Pcons−node.
In order to evaluate
Pcons−node, one can observe that it depends on the average powers consumed by the nodes in each of the following possible states: (i) transmission (tx), (ii) reception (rx), (iii) CCA, (iv) BO, and (v) idle. We denote the average percentages of time, in 1 s, spent by the nodes in each of the previous states as (i)
τtx_state, (ii)
τrx_state, (iii)
τCCA_state, (iv)
τBoff_state, and (v)
τidle_state, respectively. The average power consumed at each node can then be evaluated as follows:
At this point, we simply need to evaluate (i) the percentages of time and (ii) the powers appearing at the right-hand side of
Equation 13. We start with the percentages of time. As stated, we refer to the percentages of time spent in the various states within a 1 s interval. We remark that the assumption of a reference time equal to 1 s holds since
gTtrans ≪ 1. In fact, if
gTtrans ≥ 1, each node would always be in the transmission state, and the network would not function. Likewise, the other percentages of times are all lower than 1 under the assumed low traffic load conditions. The percentage of time spent by a node in the tx state can be computed as
The percentage of time spent in the rx state for a generic node
i can be computed as the sum of the transmission time percentages of the nodes which are within the transmission range of node
i, i.e., from the nodes belonging to
i. Owing to the previous derivations, this percentage of time does not depend on the particular node and, exploiting the results in
Equations 5 and
6, can be expressed as follows:
The percentage of time spent in the CCA phase can be evaluated as
The fraction of time spent in the BO state by a generic node
i, under the assumption that the node experiences only a single BO before transmitting a packet, can be written as
Finally, since the previous percentages of time have been evaluated with respect to a reference interval that equals to 1 s, the percentage of time spent by a node in the idle state can be expressed as
In order to evaluate the average power consumption in each state, we refer to the results presented in [
16], where the authors evaluate the power consumption of a generic node equipped with a CC2420 radio. In particular, the current consumption in the tx state depends linearly on the transmit power. The power consumption in each state is shown in
Table 1.
These terms have been obtained as a linear interpolation of the values presented in [
16]. We point out that the dimension of the coefficient
Pi is 1/V. The voltage reference for the evaluation of the consumed power is
VDD = 3 V. Given the current consumption, it is possible to derive the associated power consumption by simply multiplying the current consumption by the reference voltage. In this way, the values of the powers in the various states (excluding the tx state) become:
The power consumed in the tx state can be expressed as the arithmetic average of the specific transmit powers used by all nodes in the network:
Note that the values of {Pi} will be determined by the proposed power allocation strategy. Obviously, if a uniform power allocation strategy is used, i.e., {Pi} are all equal, the proposed derivation still holds.
2.3. Optimal Transmit Power Allocation
In this subsection, we discuss the following problem:
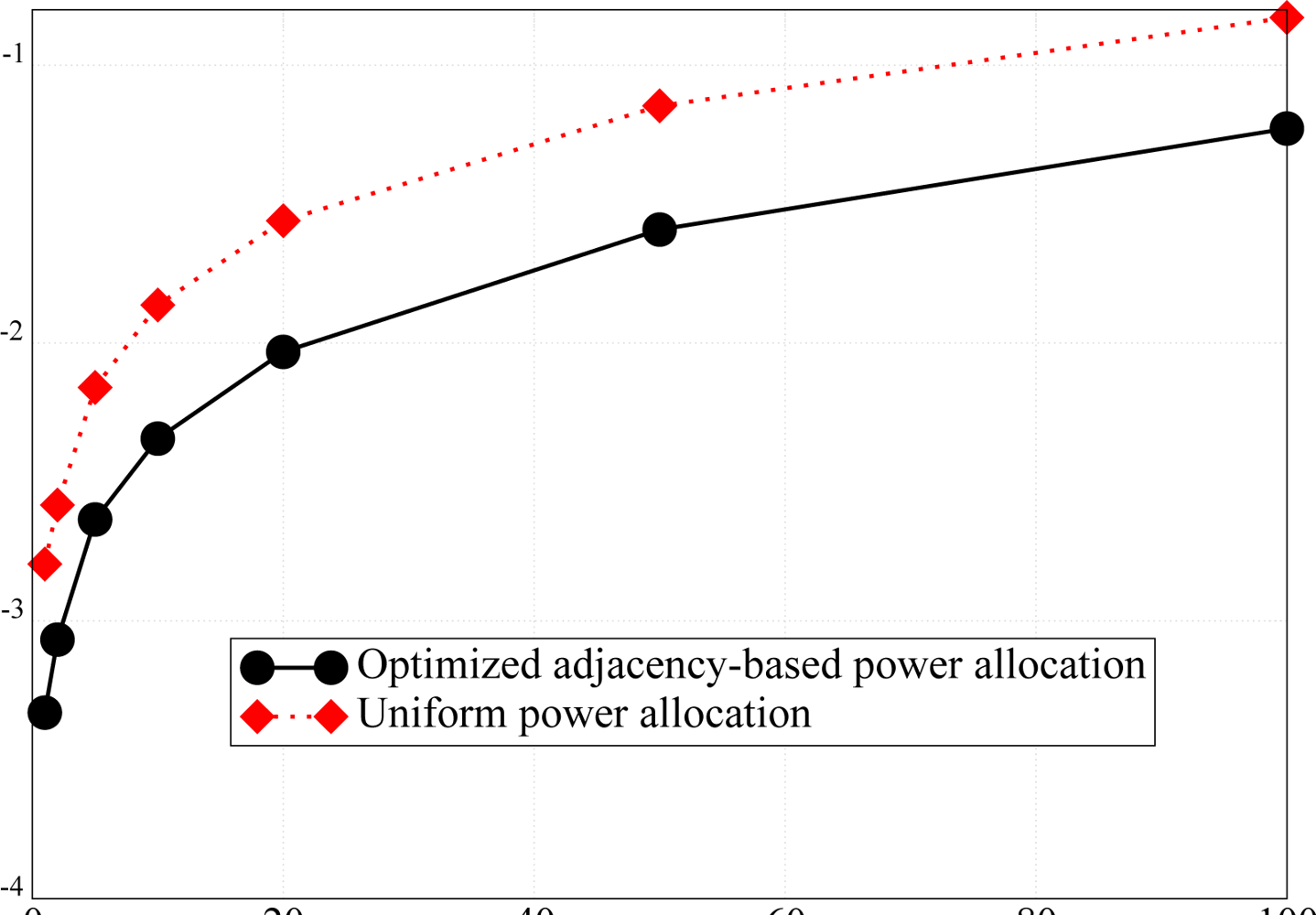
Problem 1 (Transmission error optimization) Upon the assignment of a total available transmit power Ptot for the sensor network , distribute it among the sensors in the network in order to minimize the PER at the AP.
This problem is equivalent to minimizing the overall transmit power to guarantee a desired PER at the AP.
Under low traffic load assumption, using
Equation 11 on the PER, the solution of Problem 1 is equivalent to the maximization of the adjacency |
A(
)| of sensor network
. This fact allows to recast Problem 1 in the following form.
Problem 2 (Network adjacency maximization) Upon the assignment of a total available transmit power Ptot for the sensor network , distribute it among the sensors in the network in order to maximize the network adjacency |A()|.
Assign to each sensor
si a transmission power
Pi > 0,
i = 1, . . .,
N. Then, the network adjacency is given by the following function:
where
is the Heaviside function. We remark that the Heaviside function
H(
Pi − Π(
xi, xj)) appearing in
Equation 19 is 1 if the
ith sensor transmits with a power sufficient to reach the
jth sensor, and 0 if otherwise.
For each sensor
si, define
i as the following set of transmit power values:
where Π(
xi, xj) is the transmit power with which sensor
si can reach sensor
sj and
Pmin,i is the minimum power that allows the
ith sensor to reach the AP. According to this definition, the set
i contains the value of the minimum transmit power required by the
ith sensor to reach the AP, together with the values of the transmit powers that allow
si to reach the other sensors of the network and are higher than
Pmin,i.
The following property leads to the possibility of limiting the search of possible transmit powers for a sensor si to the set i.
Proposition 1 For any set of transmit powers Pi > 0,
i = 1, . . .,
N, there exists a set of values P̄i ∈ i, such that Proof.
Define
Equation 22 follows immediately from
Equation 23. Moreover, the function at the righthand side of
Equation 19 is piecewise constant with respect to any argument
Pi, discontinuous on those values in which
Pi = Π(
xi, xj) for any
j = 1, . . .,
N. From
Equations 20 and
23 it follows that function
Q is continuous in the set [
P̄1,
P1]×[
P̄2,
P2] … [
P̄N, PN] and therefore constant in this set. Hence,
Equation 21 holds.
Proposition 1 simply means that, in the ideal threshold detection hypothesis, it is not convenient to allocate to sensor si a transmit power that does not belong to the set i, since it would employ extra power without gaining extra connectivity. For instance, in a network composed of 4 sensors, suppose that sensor 1 can reach the AP using a transmit power of 0.5 mW, whereas it needs 1 mW to reach sensor 2, 2 mW to reach sensor 3, and 0.2 mW to reach sensor 4, respectively. In this case, i = {0.5 mW, 1 mW, 2mW} contains the transmit powers that allow to reach the AP and sensors 2 and 3. The optimal transmit power for the first sensor should be chosen in this set. In fact, for example, it would be inconvenient to choose a transmit power of 1.5 mW instead of 1 mW, because the connectivity would be the same despite the increased transmit power (sensor 1 would still reach the AP and sensors 2 and 4).
The power allocation problem may be written in the following form.
Problem 3 (Discrete optimization problem) For each sensor i = 1, . . .,
N choose a transmit power Pi ∈ i such that the function T(
P1,
P2, . . .,
PN)
(defined by Equation 19) is maximized while satisfying the constraint This problem corresponds to a
multiple choice knapsack problem, which has been extensively studied in the literature [
17] and can be solved by standard computational libraries, such as MOSEK [
18]. It is well known that this problem is NP-complete and the computation time increases very quickly as the number of sensors in the network grows. However, this is a standard optimization problem and some recent tools allow finding the exact solution in a reasonable time, in many cases of practical interest.
Table 2 shows the computation time (namely the mean value and the standard deviation), in relation to the size of the sensor network, obtained with MOSEK 5 (64-bit version) running over a Core 2 Duo CPU with a clock frequency of 3.16 GHz and a 4 GB RAM. Furthermore, it is worth noting that accurate suboptimal solutions to problems of larger size (i.e., considering larger networks) could be obtained through heuristic methods.
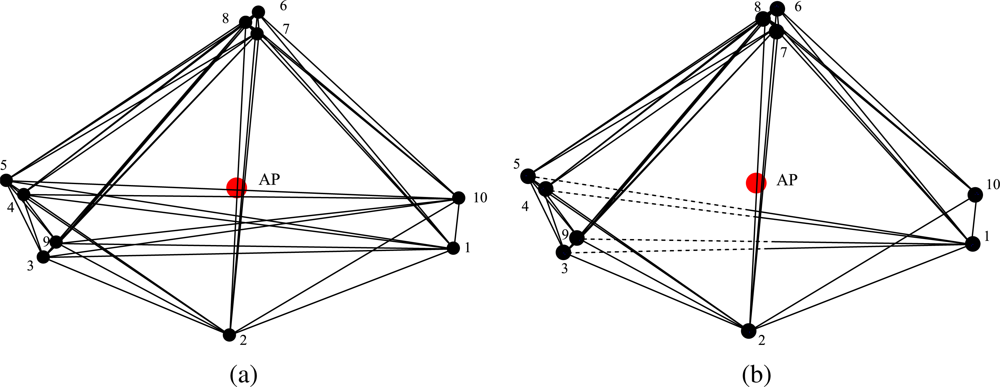
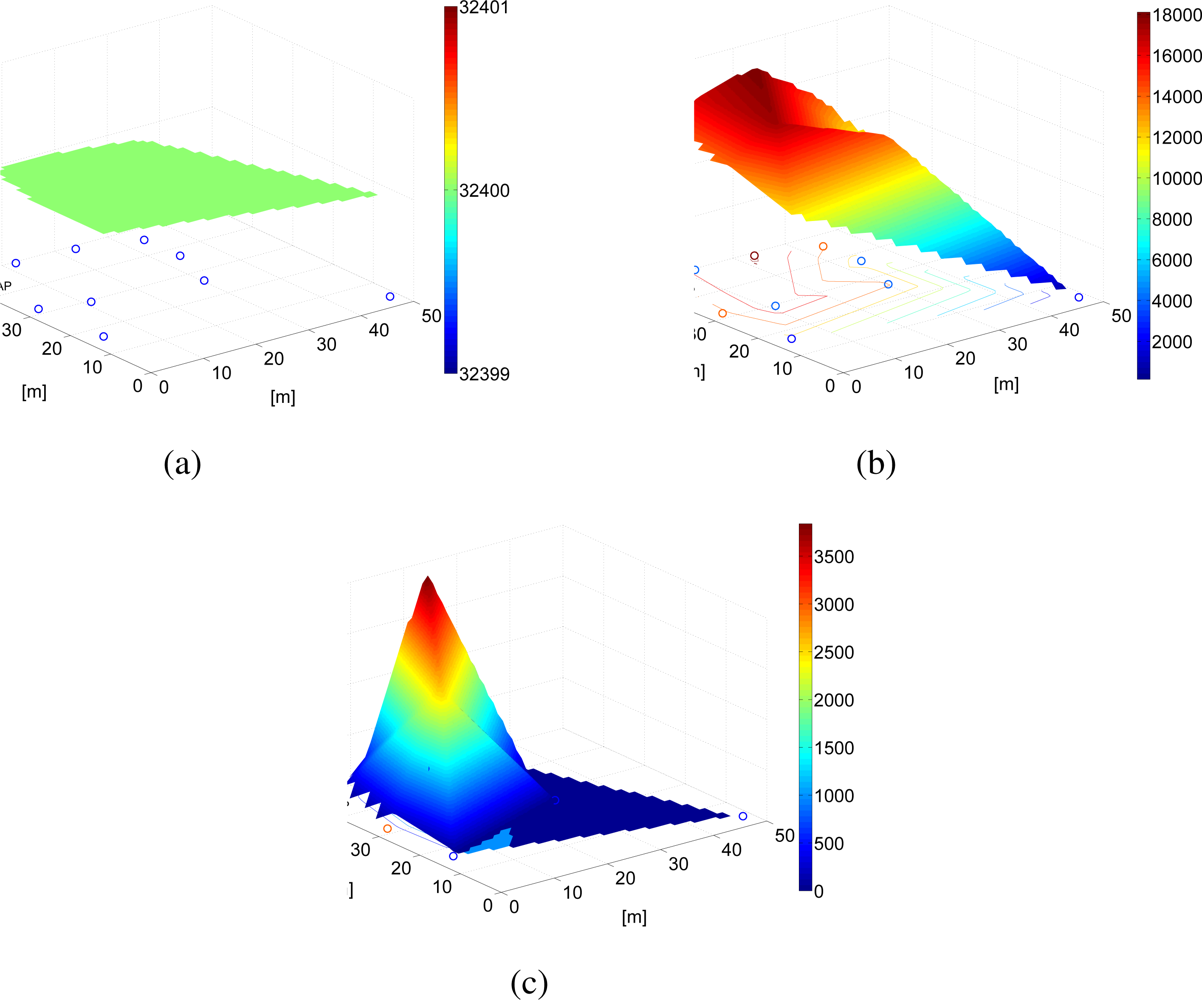
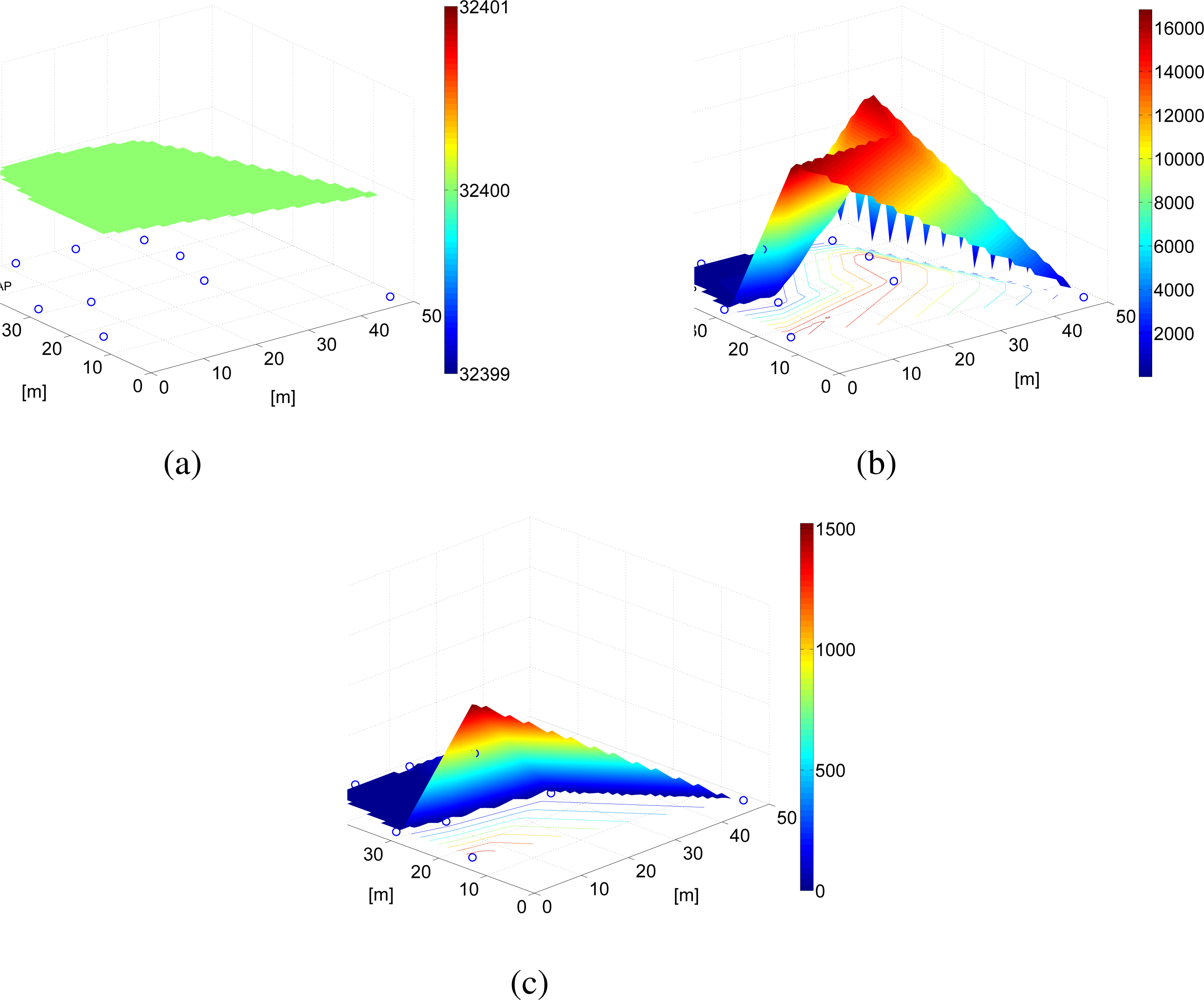
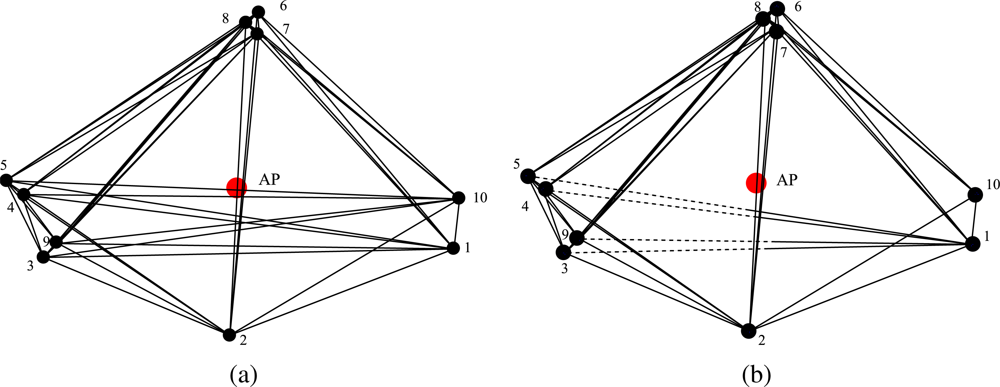
An illustration of how the proposed approach works is depicted in
Figure 1, whose legend is shown in
Figure 2. When the transmit power budget is large enough to allow each node to communicate with any other node (
Figure 1a), all bidirectional connections are active (solid lines, as shown in
Figure 1a). When the power budget is not large enough (
Figure 1b), the proposed optimized transmit power allocation strategy allocates the transmit power to the nodes in a way that the number of 1’s in the adjacency matrix is maximized. This means that some connections may be missing (absence of connecting lines between the nodes) or become monodirectional (half solid and half dashed lines, as shown in
Figure 1b).
3. Simulation Model
3.1. Zigbee Standard
The increasing need for applications, where nodes can send data without the constraints imposed by the presence of power and transmission cables, have led to the creation of low-rate wireless personal area networks (LR-WPANs). This is the case, for example, of remote monitoring of natural events, such as landslides, earthquakes, etc. [
19,
20]. One of the newest standards for WSNs, with significant power savings, is Zigbee [
6]. More precisely, the Zigbee Alliance provides instructions only for the upper layers (i.e., from the third to the seventh layer) of the ISO/OSI stack [
21]. At the first layers of the ISO/OSI stack (physical, PHY, and medium access control, MAC), the Zigbee technology is based on the IEEE 802.15.4 standard [
22] and guarantees (theoretically) a maximum transmission data rate of 250 kpbs over a wireless communication link. Three transmission bands are allowed by the Zigbee standard: (i) 2.4 GHz, (ii) 868 MHz, and (iii) 916 MHz. While the first transmission band is worldwide available, the second and third are available only in Europe and USA. In this paper, we focus only on the first two layers of the ISO/OSI stack (especially on the MAC layer): in this case, the Zigbee standard is equivalent to the IEEE 802.15.4 standard.
Since the communication between Zigbee nodes is on the same shared wireless medium, a MAC protocol is required to prevent collisions between data packets transmitted by different nodes. In particular, the IEEE 802.15.4 standard employs a non-persistent CSMA/CA MAC protocol. In addition, the IEEE 802.15.4 standard allows the use of an optional ACK message to confirm the correct delivery of a data packet. In a scenario with ACK messages, the access mechanism of the non-persistent CSMA/CA MAC protocol is slightly modified. While a generic data packet is sent according to the CSMA/CA protocol, an ACK message is sent back to the source immediately after the message is received by the destination node. If the source node does not receive the ACK message within a pre-fixed time interval, referred to as ACK window duration, the packet is declared lost and retransmitted. After three unsuccessful retransmission attempts, the packet is discarded and the node may start sending another data packet. As soon as the ACK message is received, the destination node (i.e., the node which has sent the data message and is waiting for the ACK message) waits for a period of time, referred to as long inter-frame spacing, which allows it to perform internal stack operations and process data (at the PHY layer). This interval is used also in the absence of ACK messages. In both cases, the receiving node, after sending the ACK message or receiving the data packet, waits for a shorter TAT, used to take into account radio frequency interface recalibration. During the TAT, the receiving node cannot accept new incoming packets.
We remark that the non-persistent CSMA/CA MAC protocol provides a medium access mechanism that tries to avoid packet collisions. Before transmitting a new packet, a node waits for an interval denoted as the backoff interval (BI). The backoff interval is randomly chosen within a range defined during the network start-up phase by the backoff exponent (BE) and expressed as a multiple of a reference time interval, which is referred to as the backoff unit and denoted as TB. In particular, the backoff interval is a random variable uniformly distributed in [0, (2BE − 1)TB]. For the first transmission attempt, the Zigbee standard defines BE = BEmin = 3. After the corresponding BI has elapsed, the node tries to send its packet again: if it detects a collision, it doubles the previously chosen maximum waiting interval (2BE − 1) and selects a new value for BI; if, instead, the channel is free, it transmits its packet. This procedure is repeated twice, after which, for the subsequent three unsuccessful transmission attempts, BE = BEmax = 5. After five unsuccessful retransmission attempts, the packet is dropped. This backoff algorithm makes it likely that a node will eventually manage to transmit its packet.
After the backoff period has expired, before effectively starting the packet transmission, a node needs to sense the channel in order to assess its status. The Zigbee standard provides a CCA technique which allows a node to sense the channel for a specific time interval, referred to as the CCA time. If at least another node transmits during this interval, the channel is declared busy and the node, which was sensing the channel, discards the packet and starts a retransmission.
3.2. Considered Opnet Model
The simulations have been carried out with the Modeler package of the Opnet simulator [
23] and a built-in Zigbee network model designed at the National Institute of Standards and Technologies (NIST) [
24]. We have considered a scenario where
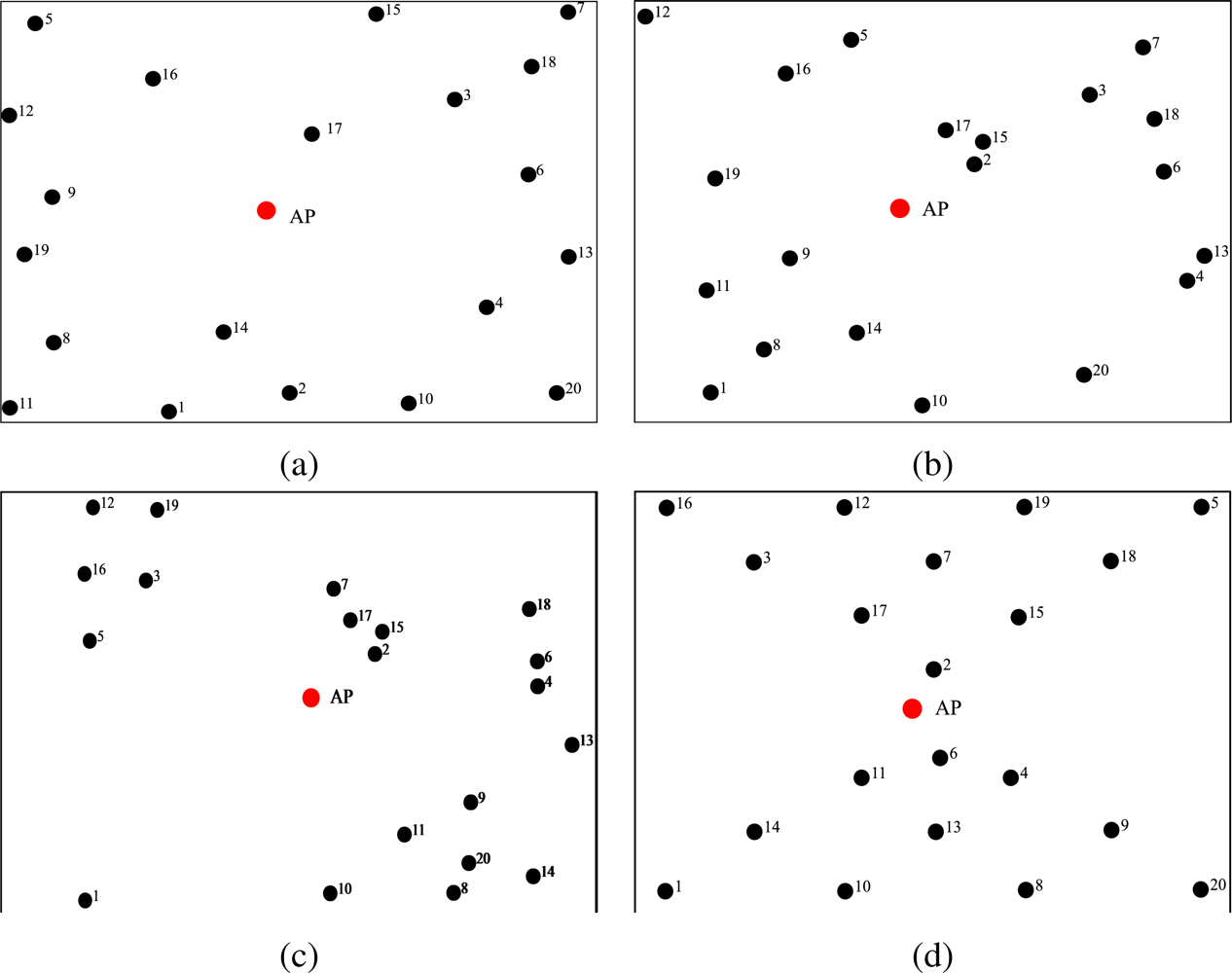
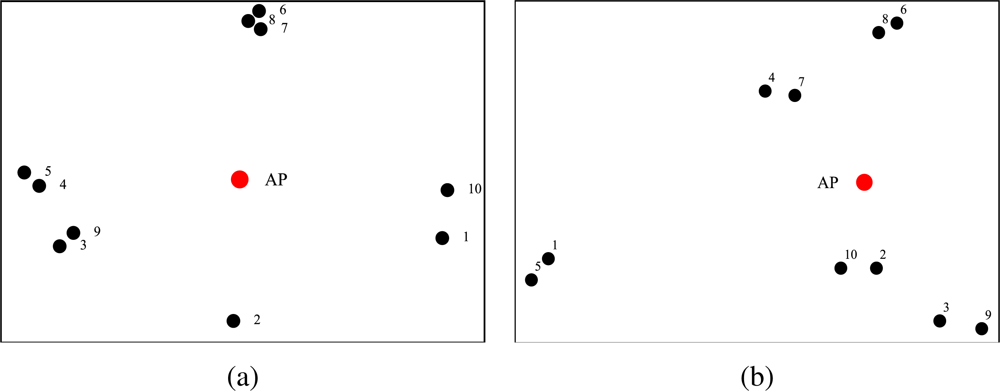
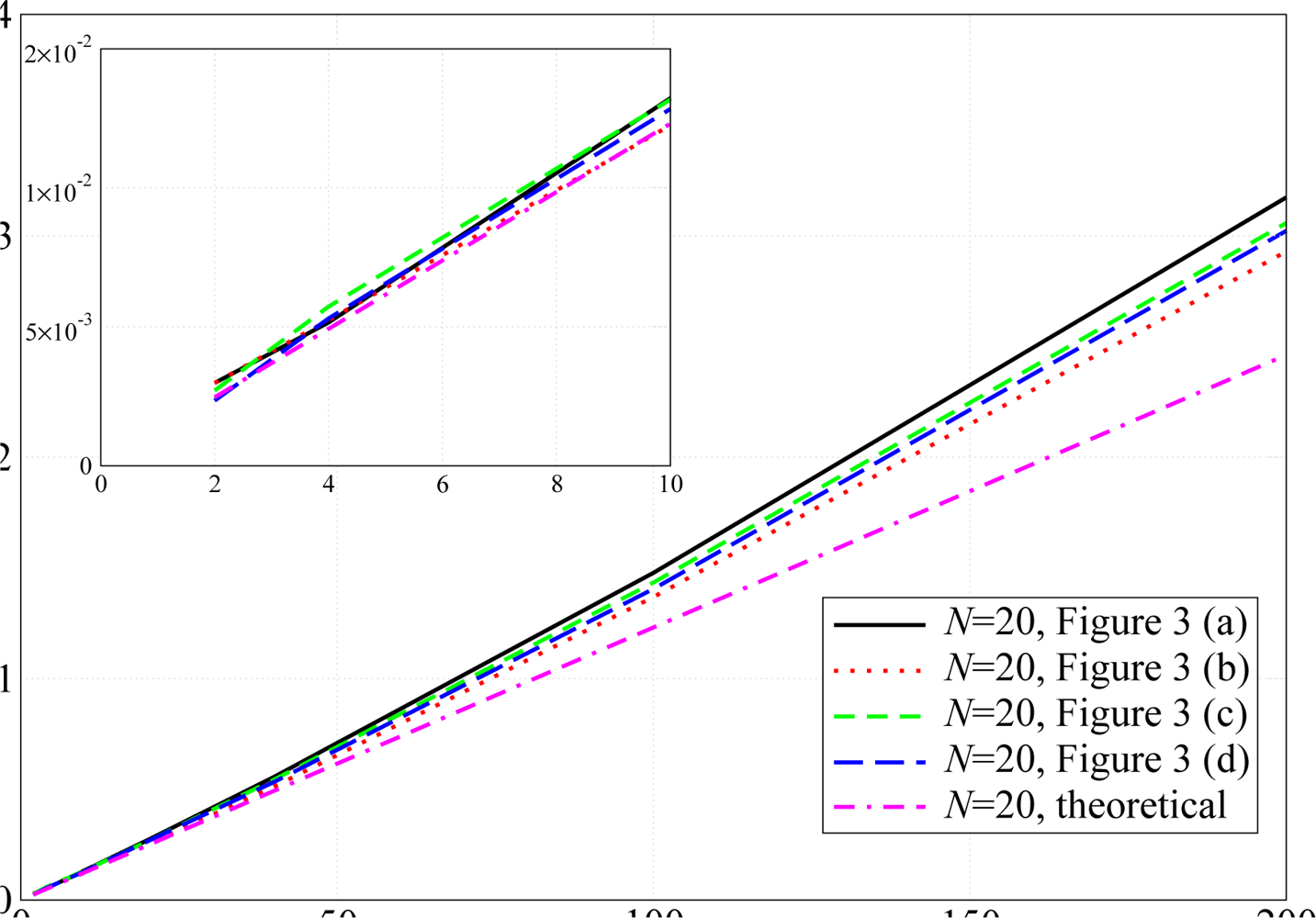
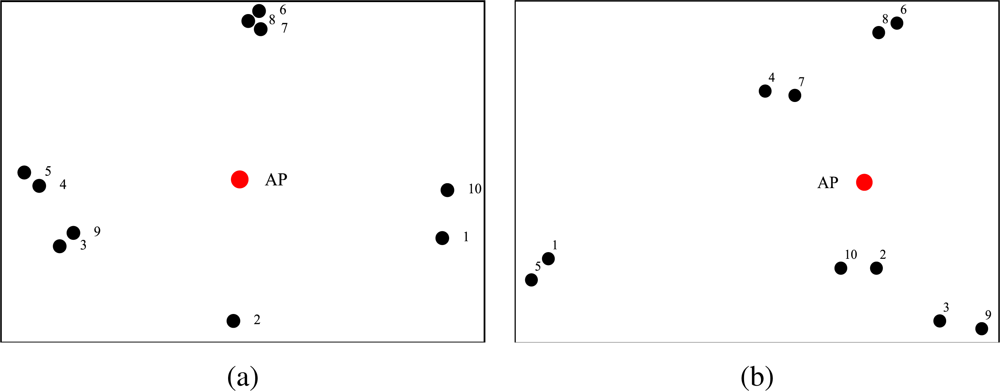
N nodes transmit directly to the AP. In particular, the considered topologies for
N = 20 are shown in
Figure 3, whereas those for
N = 10 are shown in
Figure 4.
More precisely:
in
Figure 3a,
N = 20 nodes are randomly deployed over a 100 m
2 square area (the width of the side of the surface will become meaningful for the typical values of the transmit power considered in the following. Moreover, the maximum transmission range allowed by the Zigbee standard is 100 m) and are approximately concentrated towards the external perimeter of the surface (we point out that the considered surface for
N = 10 sensors is smaller than that for
N = 20 sensors);
in
Figure 3b,
N = 20 nodes are deployed over the same surface as before, but present a few cluster and isolated nodes;
in
Figure 3c,
N = 20 nodes are placed in order to form four small groups and only one node is isolated from the others;
in
Figure 3d,
N = 20 nodes are placed over a regular grid and form two “triangular” grids which converge at the AP;
in
Figure 4a,
N = 10 nodes are approximately at the same distance from the AP and form small groups isolated from each other;
in
Figure 4b,
N = 10 nodes are clustered in groups of two. In particular, four pairs of nodes are placed near the AP, whereas the remaining pair is far from the AP.
We believe that the considered topologies are representative of a large set of possible WSN topologies. However, we remark that the proposed framework can be applied to a WSN with a generic topology.
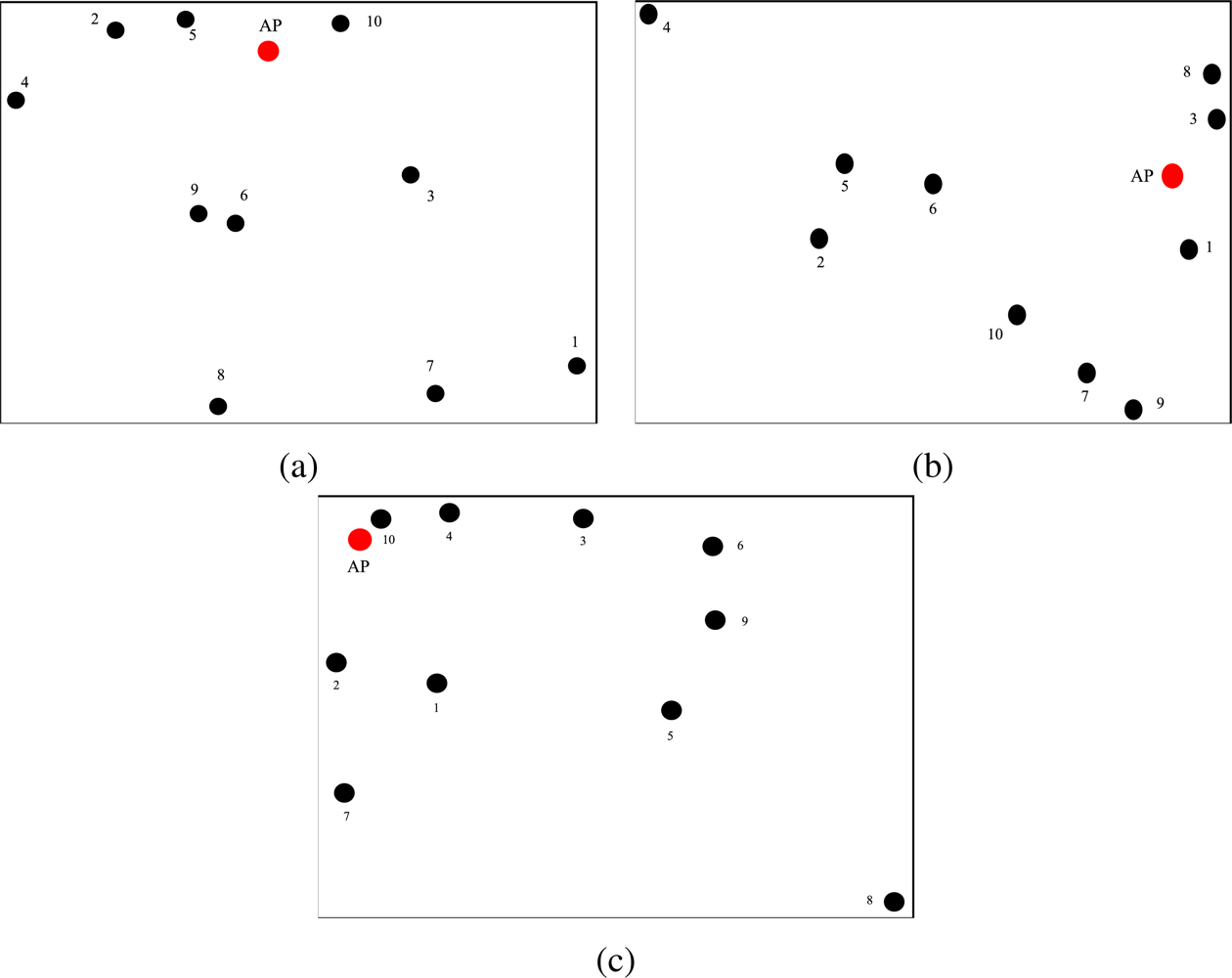
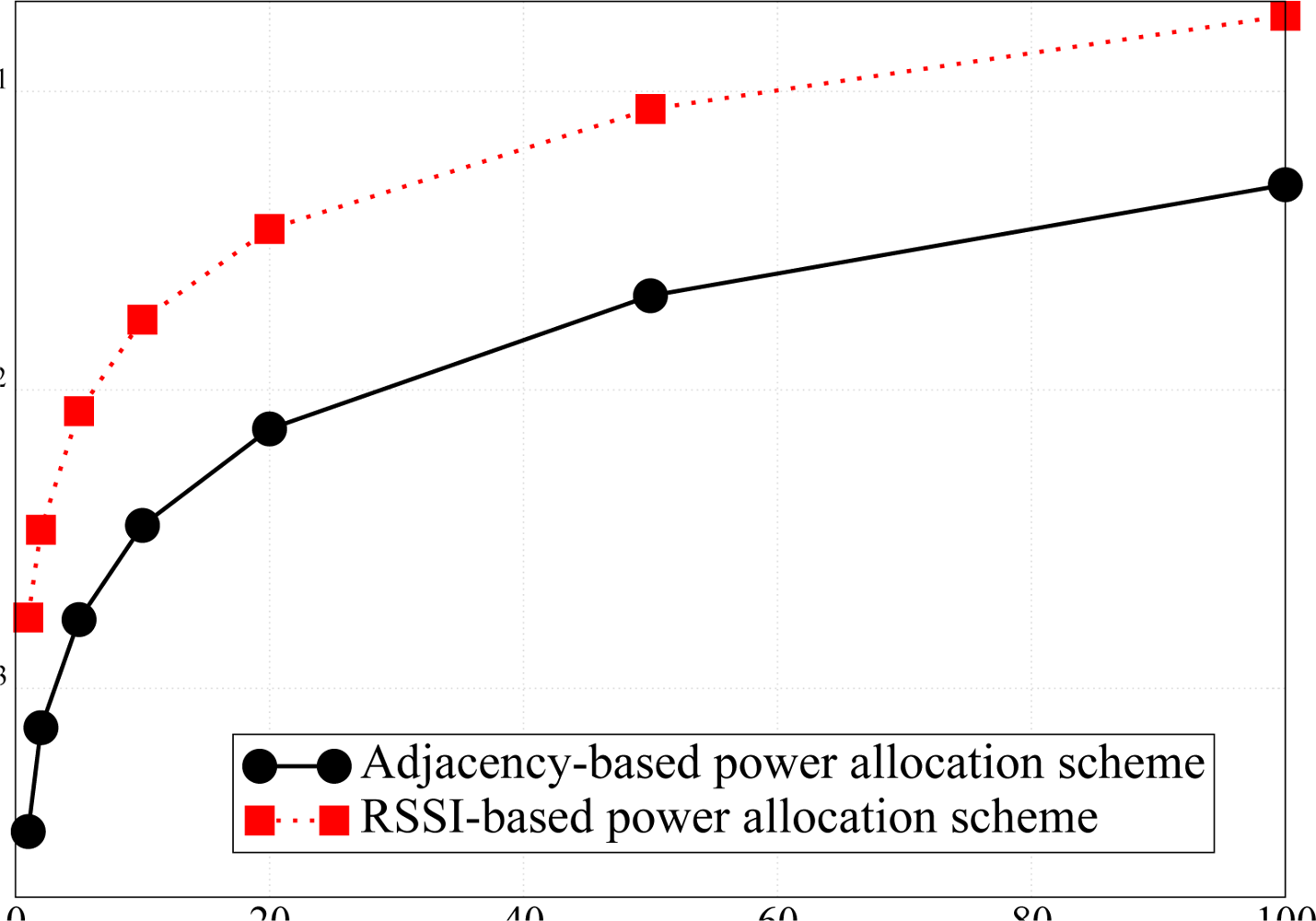
Since the proposed power allocation strategy aims at PER minimization, we have considered the network topology presented in
Figure 5a to highlight the performance gain given by the proposed adjacency-based power allocation scheme. In order to highlight the impact of the proposed power allocation strategy on the network lifetime, we have considered two scenarios with
N = 10 nodes randomly deployed over a 10 m
2 square surface and over 50 m
2 square surface. These topologies are shown in
Figure 5b and
Figure 5c, respectively.
Since the NIST Zigbee network Opnet model was developed to analyze the coexistence between IEEE 802.15.4 and IEEE 802.11 standards in small environments, it did not take into account signal attenuation [
25]. In our simulations, instead, we have neglected the impact of co-existing IEEE 802.11 networks and we have introduced the channel attenuation according to the Friis propagation model. In particular, the Friis formula is given by
Equation 1 and, in this paper, we assume
Gr =
Gt = 1 (omnidirectional antennas),
λ = 0.125 m (
fc = 2.4 GHz), and
α = 2.1. In all cases,
r is shorter than 100 m, which is the maximum transmission range allowed by the Zigbee standard. If the received power is higher than a pre-defined threshold, fixed to −90 dBm, the nodes can exchange packets.
For each of the considered topologies, the distance between the nodes and consequently the power attenuation is computed offline on the basis of the coordinates of the nodes. These values are then used to fill the adjacency matrix. In particular, consider a pair of nodes (si, sj) with i ≠ j: if si is sufficiently close to transmit to sj, we insert a “1” in the corresponding entry of the adjacency matrix (i.e., the ith row and the jth column); otherwise, we mark the absence of communication with a “0”. We remark that the communication links may be asymmetric: even if si can communicate with sj, the opposite may not hold. The distances between the nodes are also used to determine (i) the minimum (per-node) transmit power which allows each node to reach the AP and (ii) the maximum transmit power which guarantees that each node can reach any other node in the network.
The Zigbee standard provides indications about the values of the main network parameters introduced in Section 3.1. The values of the relevant parameters for our simulations are shown in
Table 3. We remark that the Opnet simulator expresses all time-related parameters as multiples of the fundamental time unit, which corresponds to the inverse of the transmission data rate
R. The simulations have been repeated several times with different seed initialization parameters in order to ensure that possible statistical fluctuations are avoided. The Opnet simulator also stores into log files the values of important metrics related to (i) packet transmission, such as the numbers of correctly received packets and noisy packets, and (ii) packet generation, such as the numbers of sent packets and dropped packets.
We remark that the simplified theoretical model presented in Section 2. is compliant with the simulation model just described.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}