Early Forest Fire Detection Using Radio-Acoustic Sounding System

Abstract
:1. Introduction
2. Related Works and Motivation
3. Temperature Measurement by Radio-Acoustic Sounding
4. Proposed System
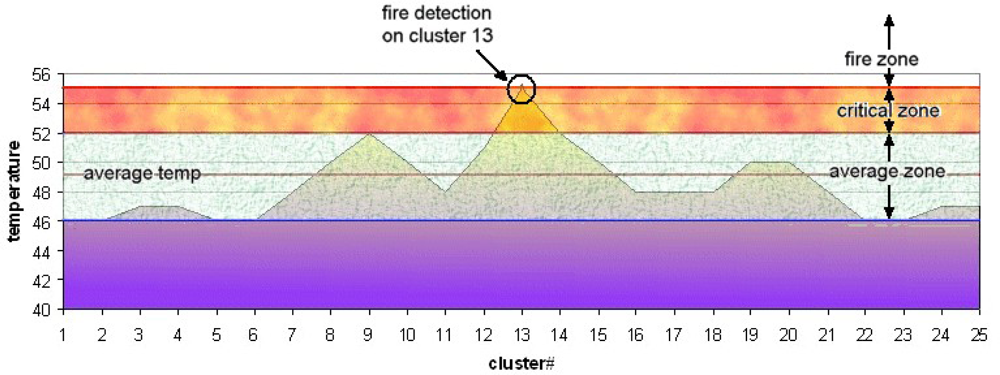
4.1. Operational Details and Simulation Results
4.2. Effectiveness and Economical View of the Forest Fire Detection System
5. Conclusions
References
- Dupuy, J.L.; Vachet, P.; Marechal, J.; Melendez, J.; de Castro, A.J. Thermal infrared emission–transmission measurements in flames from a cylindrical forest fuel burner. International Journal of Wildland Fire 2007, 16(3), 324–340. [Google Scholar]
- Riaño, D.; Chuvieco, E.; Ustin, S.L.; Salas, J.; Rodríguez-Pérez, J.R.; Ribeiro, L.M.; Viegas, D.X.; Moreno, J.M.; Fernández, H. Estimation of shrub height for fuel-type mapping combining airborne LiDAR and simultaneous color infrared ortho imaging. International Journal of Wildland Fire 2007, 16(3), 341–348. [Google Scholar]
- White, J.D.; Ryan, K.C.; Key, C.C.; Running, S.W. Remote sensing of forest fire severity and vegetation recovery. International Journal of Wildland Fire 1996, 6(3), 125–136. [Google Scholar]
- Kolaric, D.; Skala, K.; Dubravic, A. Integrated system for forest fire early detection and management. Periodicum Biologorum 2008, 110(2), 205–211. [Google Scholar]
- Lee, B.S.; Alexander, M.E.; Hawkes, B.C.; Lynham, T.J.; Stocks, B.J.; Englefield, P. Information systems in support of wildland fire management decision making in Canada. Computers and Electronics in Agriculture 2002, 37, 185–198. [Google Scholar]
- Merino, L.; Caballero, F.; Martinez-de Dios, J.R.; Ferruz, J.; Ollero, A. A cooperative perception system for multiple UAVs: Application to automatic detection of forest fires. Journal of Field Robotics 2006, 23(3–4), 165–184. [Google Scholar]
- Mutlu, M.; Popescu, S.C.; Zhao, K.G. Sensitivity analysis of fire behavior modeling with LIDAR-derived surface fuel maps. Forest Ecology and Management 2008, 256(3), 289–294. [Google Scholar]
- Vining, J.; Merrick, M.S. The influence of proximity to a national forest on emotions and fire-management decisions. Environmental Management 2008, 41(2), 155–167. [Google Scholar]
- Hirsch, K.; Kafka, V.; Tymstra, C.; McAlpine, R.; Hawkes, B.; Stegehuis, H.; Quintilio, S.; Gauthier, S.; Peck, K. Fire-smart forest management: A pragmatic approach to sustainable forest management in fire-dominated ecosystems. Forestry Chronicle 2001, 77(2), 357–363. [Google Scholar]
- Peckham, S.D.; Ahl, D.E.; Serbin, S.P.; Gower, S.T. Fire-induced changes in green-up and leaf maturity of the Canadian boreal forest. Remote Sensing of Environment 2008, 112, 3594–3603. [Google Scholar]
- Lavrov, A.; Utkin, A.B.; Vilar, R.; Fernandes, A. Evaluation of smoke dispersion from forest fire plumes using Lidar experiments and modeling. International Journal of Thermal Sciences 2006, 45(9), 848–859. [Google Scholar]
- Chen, Y.H.; Li, J.; Peng, G.X. Forest fire risk assessment combining remote sensing and meteorological information. New Zealand Journal of Agricultural Research 2007, 50(5), 1037–1044. [Google Scholar]
- Hufford, G.L.; Kelley, H.L.; Moore, R.K.; Cotterman, J.S. Detection and growth of an Alaskan forest fire using GOES-9 3.9 mum imagery. International Journal of Wildland Fire 2000, 9(2), 129–136. [Google Scholar]
- Gautam, R.S.; Singh, D.; Mittal, A. An efficient contextual algorithm to detect subsurface fires with NOAA/AVHRR data. IEEE Transactions on Geoscience and Remote Sensing 2008, 46(7), 2005–2015. [Google Scholar]
- McCarty, J.L.; Loboda, T.; Trigg, S. A hybrid remote sensing approach to quantifying crop residue burning in the United States. Applied Engineering in Agriculture 2008, 24(4), 515–527. [Google Scholar]
- Wang, W.; Qu, J.J.; Hao, X.; Liu, Y.; Sommers, W.T. An improved algorithm for small and cool fire detection using MODIS data: A preliminary study in the southeastern United States. Remote Sensing of Environment 2007, 108, 163–170. [Google Scholar]
- Roberts, G.J.; Wooster, M.J. Fire detection and fire characterization over Africa using meteosat SEVIRI. IEEE Transactions on Geoscience and Remote Sensing 2008, 46(4), 1200–1218. [Google Scholar]
- Kalpoma, K.A.; Kudoh, J.I. A new algorithm for forest fire detection method with statistical analysis using NOAA AVHRR images. International Journal of Remote Sensing 2006, 27(18), 3867–3880. [Google Scholar]
- Ostir, K.; Veljanovski, T.; Podobnikar, T.; Stancic, Z. Application of satellite remote sensing in natural hazard management: the Mount Mangart landslide case study. International Journal of Remote Sensing 2003, 24(20), 3983–4002. [Google Scholar]
- Kelha, V.; Rauste, Y.; Hame, T.; Sephton, T.; Buongiorno, A.; Frauenberger, O.; Soini, K.; Venalainen, A.; San Miguel-Ayanz, J.; Vainio, T. Combining AVHRR and ATSR satellite sensor data for operational boreal forest fire detection. International Journal of Remote Sensing 2003, 24(8), 1691–1708. [Google Scholar]
- Galindo, I.; Lopez-Perez, P.; Evangelista-Salazar, M. Real-time AVHRR forest fire detection in Mexico (1998–2000). International Journal of Remote Sensing 2003, 24(1), 9–22. [Google Scholar]
- Cuomo, V.; Lasaponara, R.; Tramutoli, V. Evaluation of a new satellite-based method for forest fire detection. International Journal of Remote Sensing 2001, 22(9), 1799–1826. [Google Scholar]
- Rauste, Y.; Herland, E.; Frelander, H.; Soini, K.; Kuoremaki, T.; Ruokari, A. Satellite-based forest fire detection for fire control in boreal forests. International Journal of Remote Sensing 1997, 18(12), 2641–2656. [Google Scholar]
- Chuvieco, E.; Martin, M.P. A simple method for fire growth mapping using AVHRR Channel-3 data. International Journal of Remote Sensing 1994, 15(16), 3141–3146. [Google Scholar]
- Briess, K.; Jahn, H.; Ginati, A.; Sommer, K. A small satellite solution for the fire detection and monitoring from space. Acta Astronautica 1996, 39(6), 447–457. [Google Scholar]
- Aksenov, O.Y.; Antonets, A.I.; Gushchin, S.I. Principal results of experiments on forest-fire detection from high-orbit spacecraft. Soviet Journal of Optical Technology 1992, 59(8), 455–456. [Google Scholar]
- Hall, R.J.; Freeburn, J.T.; de Groot, W.J.; Pritchard, J.M.; Lynham, T.J.; Landry, R. Remote sensing of burn severity: experience from western Canada boreal fires. International Journal of Wildland Fire 2008, 17(4), 476–489. [Google Scholar]
- Rego, F.C.; Catry, F.X. Modelling the effects of distance on the probability of fire detection from lookouts. International Journal of Wildland Fire 2006, 15(2), 197–202. [Google Scholar]
- Yuan, F. A fast accumulative motion orientation model based on integral image for video smoke detection. Pattern Recognition Letters 2008, 29, 925–932. [Google Scholar]
- Lafarge, F.; Descombes, X.; Zerubia, J.; Mathieu, S. Forest fire detection by statistical analysis of rare events from thermical infrared images. Traitement Du Signal 2007, 24(1), 1–12. [Google Scholar]
- Guillemant, P.; Vicente, J. Real-time identification of smoke images by clustering motions on a fractal curve with a temporal embedding method. Optical Engineering 2001, 40(4), 554–563. [Google Scholar]
- Arrue, B.C.; Ollero, A.; de Dios, J.R.M. An intelligent system for false alarm reduction in infrared forest-fire detection. IEEE Intelligent Systems & Their Applications 2000, 15(3), 64–73. [Google Scholar]
- Ollero, A.; Arrue, B.; Martinez, J.R.; Murillo, J.J. Techniques for reducing false alarms in infrared forest-fire automatic detection systems. Control Engineering Practice 1999, 7(1), 123–131. [Google Scholar]
- Thomas, P.J.; Nixon, O. Near-infrared forest-fire detection concept. Applied Optics 1993, 32(27), 5348–5355. [Google Scholar]
- Stipaničev, D.; Vuko, T.; Krstinić, D.; Štula, M.; Bodrožić, L. Forest fire protection by advanced video detection system - Croatian experiences. Third TIEMS Workshop-Improvement of Disaster Management System, Trogir,. Sep 26–27 2006. [Google Scholar]
- Lavrov, A.; Utkin, A.B.; Vilar, R.; Fernandes, A. Evaluation of smoke dispersion from forest fire plumes using lidar experiments and modeling. International Journal of Thermal Sciences 2006, 45(9), 848–859. [Google Scholar]
- Fernandes, A.M.; Utkin, A.B.; Lavrov, A.V.; Vilar, R.M. Design of committee machines for classification of single-wavelength LIDAR signals applied to early forest fire detection. Pattern Recognition Letters 2005, 26(5), 625–632. [Google Scholar]
- Fernandes, A.M.; Utkin, A.B.; Lavrov, A.V.; Vilar, R.M. Development of neural network committee machines for automatic forest fire detection using LIDAR. Pattern Recognition 2004, 37(10), 2039–2047. [Google Scholar]
- Cordoba, A.; Vilar, R.; Lavrov, A.; Utkin, A.B.; Fernandes, A. Multi-objective optimization of lidar parameters for forest-fire detection on the basis of a genetic algorithm. Optics and Laser Technology 2004, 36(5), 393–400. [Google Scholar]
- Lavrov, A.; Utkin, A.B.; Vilar, R.; Fernandes, A. Application of lidar in ultraviolet, visible and infrared ranges for early forest fire detection. Applied Physics B-Lasers and Optics 2003, 76(1), 87–95. [Google Scholar]
- Krider, E.P.; Noggle, R.C.; Pifer, A.E.; Vance, D.L. Lightning direction-finding systems for forest fire detection. Bulletin of the American Meteorological Society 1980, 61(9), 980–986. [Google Scholar]
- Utkin, A.B.; Fernandes, A.; Simoes, F.; Lavrov, A.; Vilar, R. Feasibility of forest-fire smoke detection using lidar. International Journal of Wildland Fire 2003, 12(2), 159–166. [Google Scholar]
- Alexander, R.; Green, R.; Sebelius, J. GIS mapping - Role of composting in forest fire management and prevention. Biocycle 2002, 43(7), 34–38. [Google Scholar]
- Kourtz, P. Decision-making for centralized forest fire management. Forestry Chronicle 1984, 60(6), 320–327. [Google Scholar]
- Sahin, Y.G. Animals as mobile biological sensors for forest fire detection. Sensors 2007, 7(12), 3084–3099. [Google Scholar]
- Fernandes, A.M.; Utkin, A.B.; Lavrov, A.V.; Vilar, R.M. Optimization of location and number of lidar apparatuses for early forest fire detection in hilly terrain. Fire Safety Journal 2006, 41(2), 144–154. [Google Scholar]
- Kourtz, P. The need for improved forest-fire detection. Forestry Chronicle 1987, 63(4), 272–277. [Google Scholar]
- Martell, D.L.; Gunn, E.A.; Weintraub, A. Forest management challenges for operational researchers. European Journal of Operational Research 1998, 104, 1–17. [Google Scholar]
- Chetehouna, K.; Séro-Guillaume, O.; Sochet, I.; Degiovanni, A. On the experimental determination of flame front positions and of propagation parameters for a fire. International Journal of Thermal Sciences 2008, 47, 1148–1157. [Google Scholar]
- Wilson, D.K.; Thomson, D.W. Acoustic tomographic monitoring of the atmospheric surface layer. Journal of Atmospheric and Oceanic Technology 1994, 6, 751–769. [Google Scholar]
- Emeis, S.; Schafer, K. Remote sensing methods to investigate boundary-layer structures relevant to air pollution in cities. Boundary-Layer Meteorology 2006, 121, 377–385. [Google Scholar]
- Raabe, A.; Arnold, K.; Ziemann, A. Near surface spatially averaged air temperature and wind speed determined by acoustic travel time tomography. Meteorologische Zeitschrift 2001, 10, 61–70. [Google Scholar]
- Tetzlaff, G.; Arnold, K.; Raabe, A.; Ziemann, A. Observations of area averaged near-surface wind- and temperature-fields in real terrain using acoustic travel time tomography. Meteorologische Zeitschrift 2002, 11, 273–83. [Google Scholar]
- Marshall, J.M.; Peterson, A.M.; Barnes, A.A. Combined radar-acoustic sounding system. Applied Optics 1972, 11(1), 108–112. [Google Scholar]
- International Organization for Standardization. ISO 9613-1 Acoustics–Attenuation of sound during propagation outdoors. Part 1: Calculation of the absorption of sound by the atmosphere. http://www.iso.org/iso/iso_catalogue/catalogue_tc/catalogue_detail.htm?csnumber=17426 (accessed Feb 07, 2009).
- Angevine, W.M.; Avery, S.K.; Ecklund, W.L.; Carter, D.A. Fluxes of heat and momentum measured with a boundary layer wind profiler radar-radio acoustic sounding system. Journal of Applied Meteorology 1993, 32, 73–81. [Google Scholar]
- Ince, T.; Frasier, J.S.; Muschinski, A.; Pazmany, A. An S-band frequency-modulated continuous-wave boundary layer profiler: Description and initial results. Radio Science 2003, 38(4), 1072. [Google Scholar]
- Emeis, S.; Münkel, C.; Vogt, S.; Müller, W.J.; Schäfera, K. Atmospheric boundary-layer structure from simultaneous Sodar, Rass, and ceilometer measurements. Atmospheric Environment 2004, 38(2), 273–286. [Google Scholar]
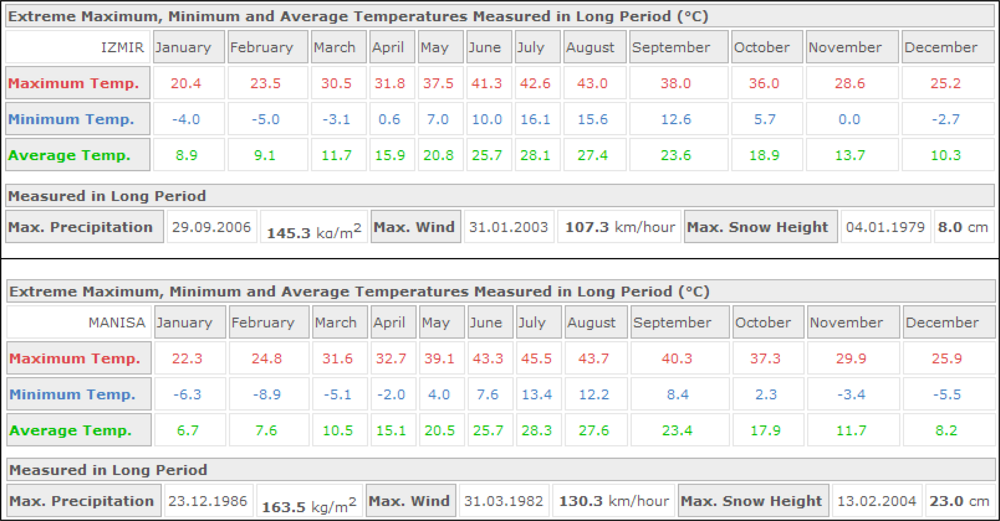
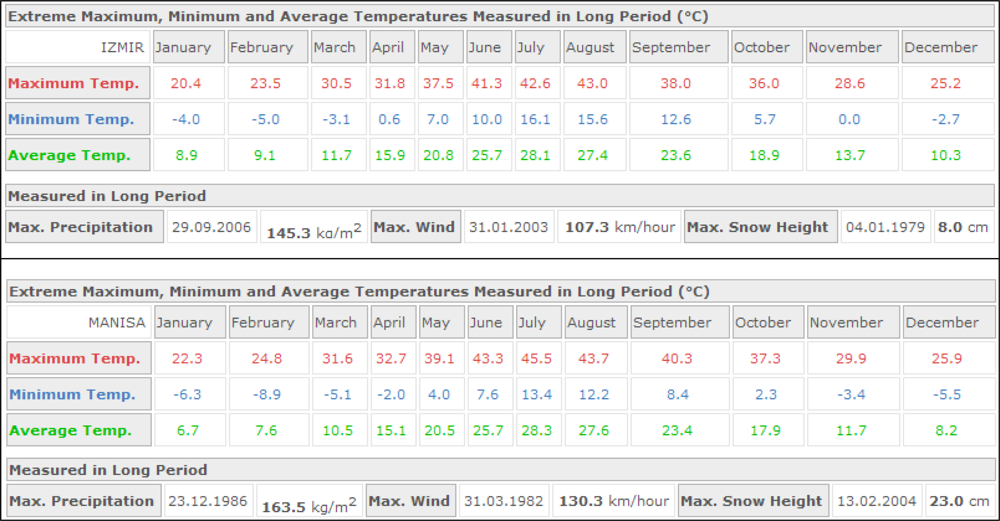
- Turkish State Meteorological Service. Extreme Maximum, Minimum and Average Temperatures Measured in Long Period (°C) for Izmir. http://www.dmi.gov.tr/en-US/forecast-cities.aspx?m=IZMIR (accessed Feb 07, 2009).
- Turkish State Meteorological Service. Extreme Maximum, Minimum and Average Temperatures Measured in Long Period (°C) for Manisa. http://www.dmi.gov.tr/en-US/forecast-cities.aspx?m=MANISA (accessed Feb 07, 2009).
- Martell, D.L.; McAlpine, R.S. Forest Fire Detection Economics. In Fire Detection Workshop; Hinton, Alberta, CA, Mar 25 2003. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (KHz) | (MHz) | Pr (W) | Pa (W) | Range coverage (radius) |
|---|---|---|---|---|
| 1.035 | 457.5 | 30 | 18 | 200 m – 2.5 km |
| 2.070 | 915.0 | 35 | 20 | 200 m – 2.5 km |
| 3.105 | 1372.5 | 40 | 30 | 200 m – 2.5 km |
| 4.140 | 1830.0 | 45 | 40 | 200 m – 2.5 km |
| 8.280 | 3660.0 | 55 | 80 | 200 m – 2.5 km |
| 16.560 | 7320.0 | 70 | 160 | 200 m – 2.5 km |
| Subject | Data/Assumption/Value |
|---|---|
| Place | Manisa-Izmir – Turkey |
| Season | Summer (July–August) |
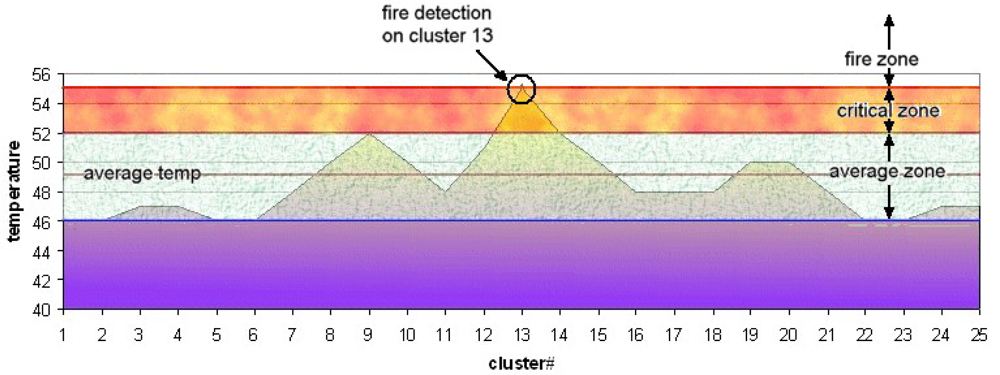
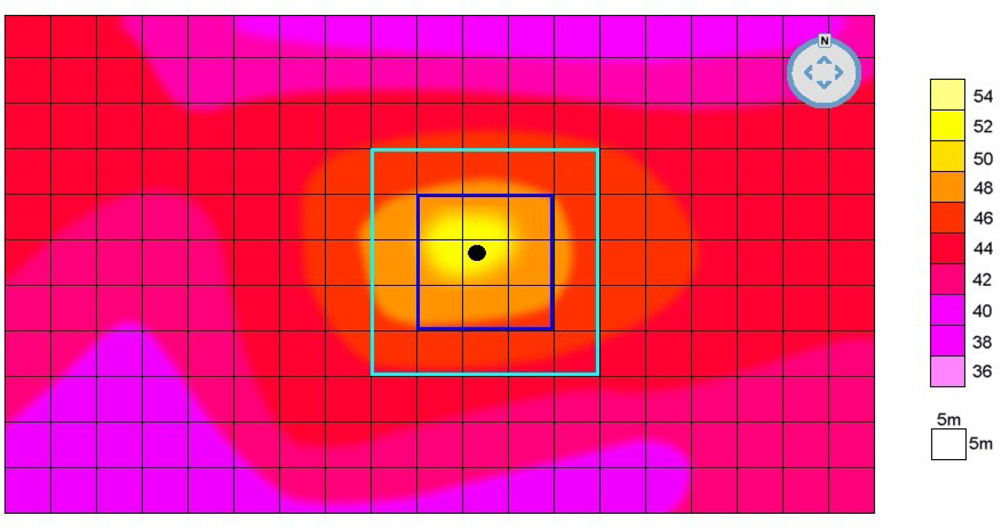
| Upper limit for critical zone | 55°C (because the seasonal norms shows that the maximum temperature can be 54°C for that area under sunlight) [59,60] |
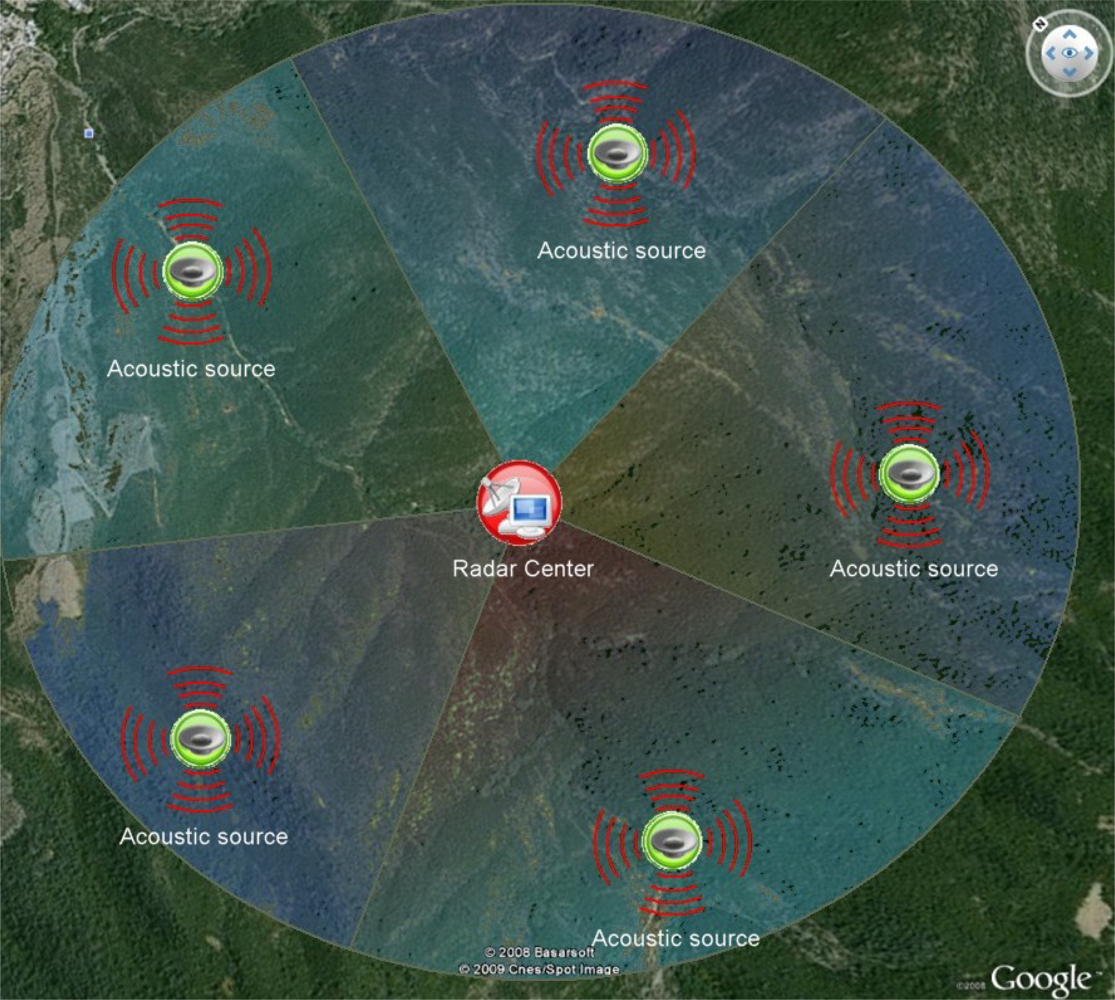
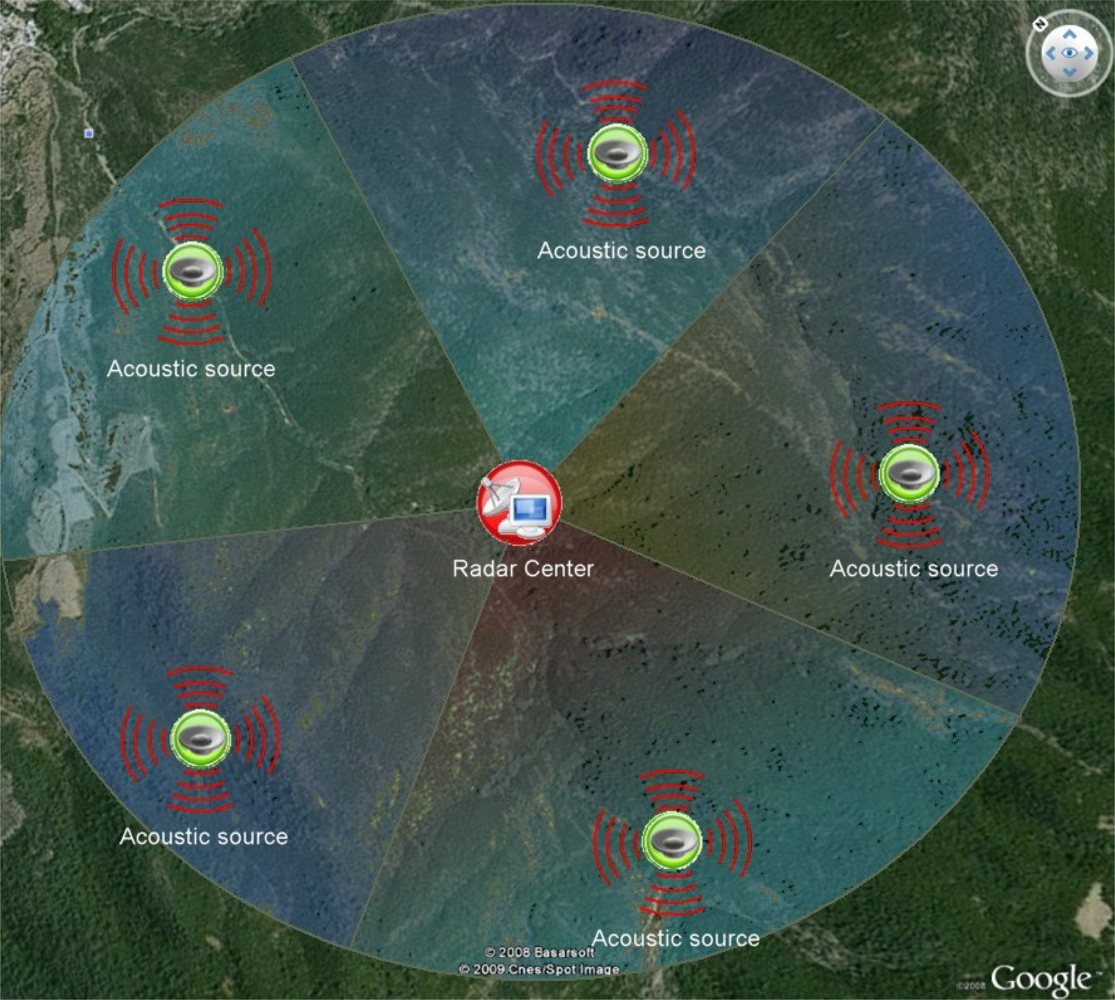
| Number of sound sources | 5 (each source can be effective for 19.6 km2) |
| Approximate coverage area | 98 km2 (5 acoustic sources × 19.6 km2 for each acoustic source) |
| fa | 8.280 KHz |
| fr | 3,660 MHz |
| Pr | 55 W |
| Pa | 80 W |
| Threshold temp value for anomaly | 7°C (this value (6°C–10°C) obtained using the air temperature difference between sunlight and shade for the specified forest area) [59,60] |
| Critical zone temp | 52°C [59,60] |
© 2009 by the authors; licensee MDPI, Basel, Switzerland This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Sahin, Y.G.; Ince, T. Early Forest Fire Detection Using Radio-Acoustic Sounding System. Sensors 2009, 9, 1485-1498. https://doi.org/10.3390/s90301485
Sahin YG, Ince T. Early Forest Fire Detection Using Radio-Acoustic Sounding System. Sensors. 2009; 9(3):1485-1498. https://doi.org/10.3390/s90301485
Chicago/Turabian StyleSahin, Yasar Guneri, and Turker Ince. 2009. "Early Forest Fire Detection Using Radio-Acoustic Sounding System" Sensors 9, no. 3: 1485-1498. https://doi.org/10.3390/s90301485
APA StyleSahin, Y. G., & Ince, T. (2009). Early Forest Fire Detection Using Radio-Acoustic Sounding System. Sensors, 9(3), 1485-1498. https://doi.org/10.3390/s90301485