Flexible Electronics Sensors for Tactile Multi-Touching



Abstract
:1. Introduction
2. Experimental Procedure
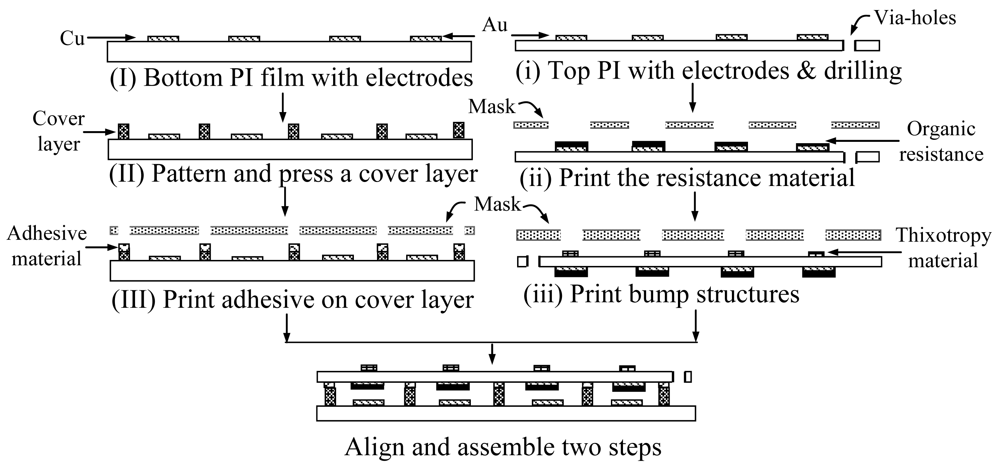
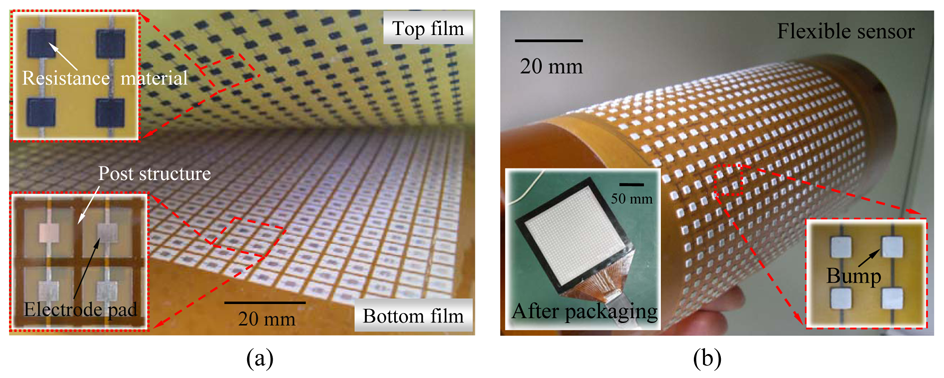
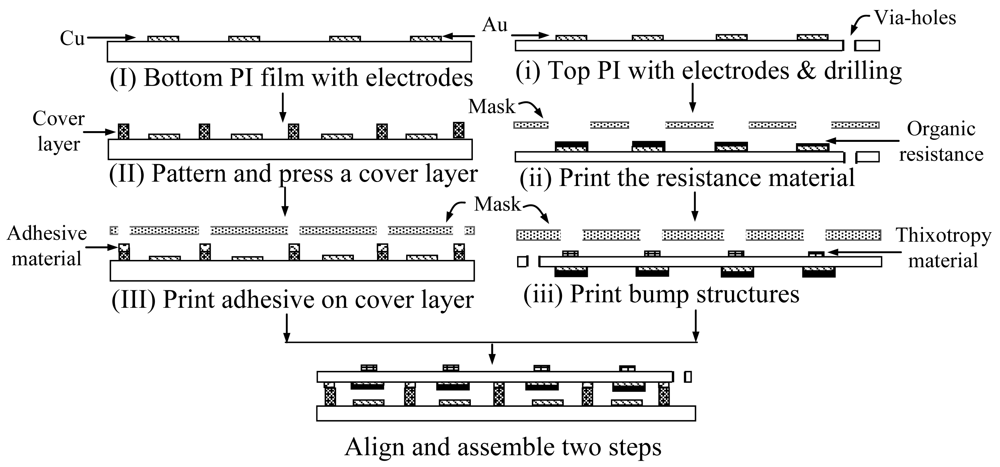
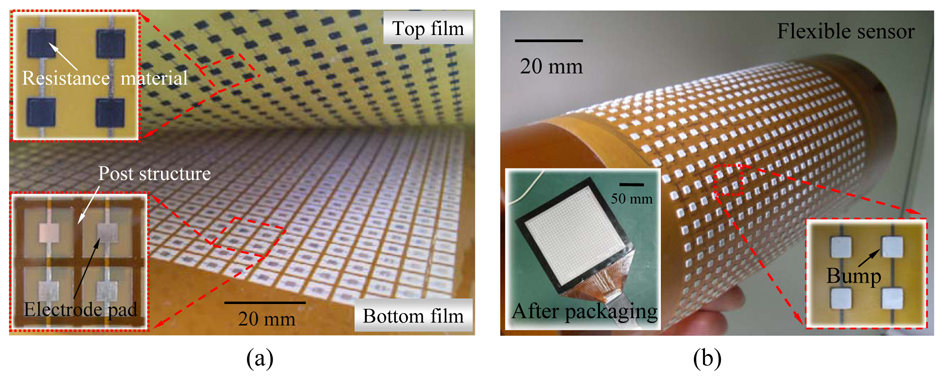
2.1. Fabrication
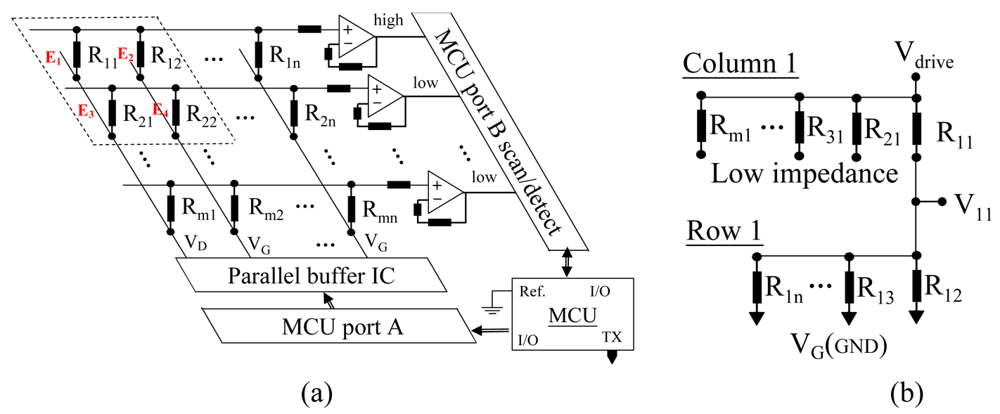
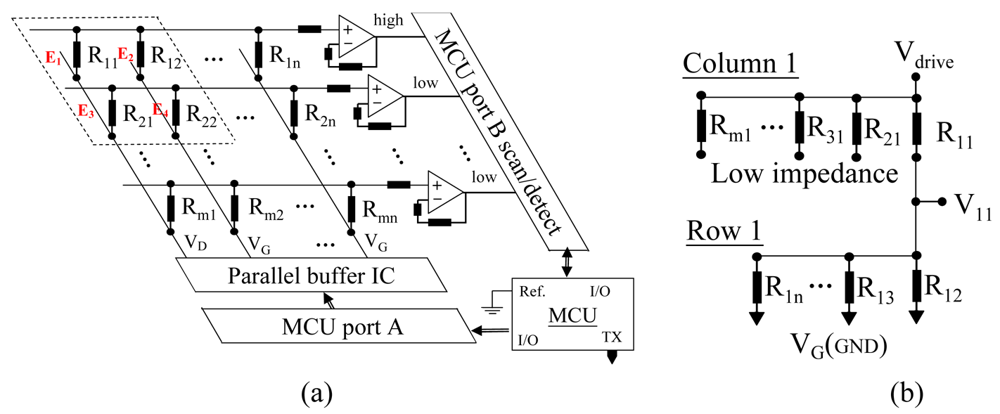
2.2. Control Frame for Multi-touching
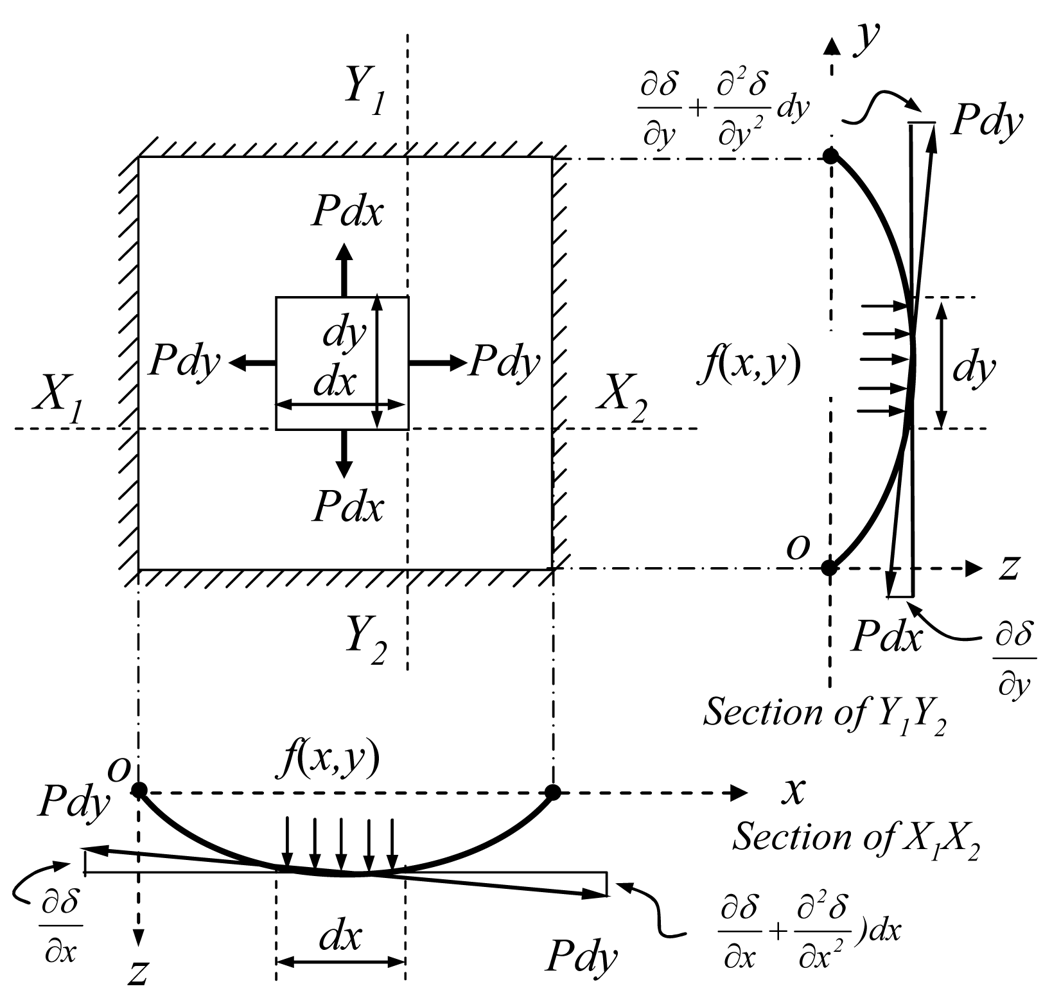
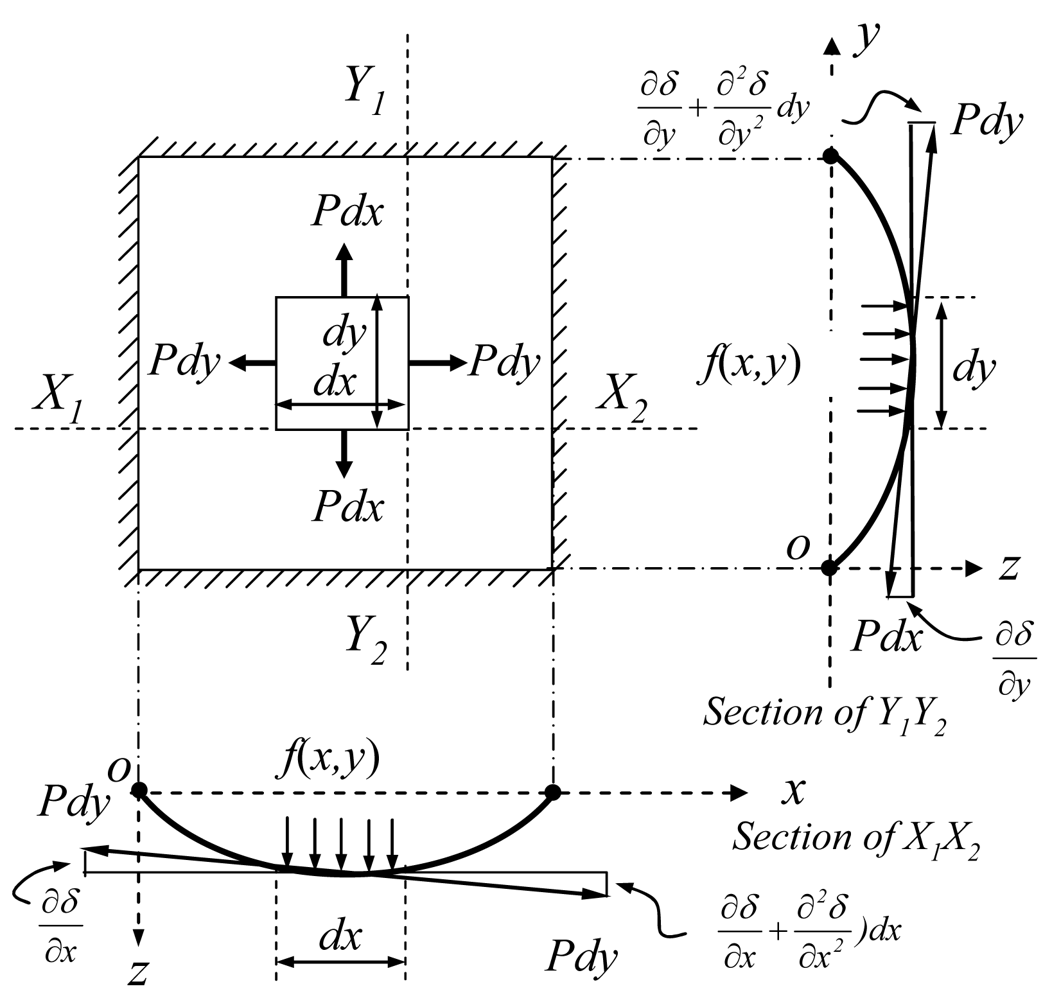
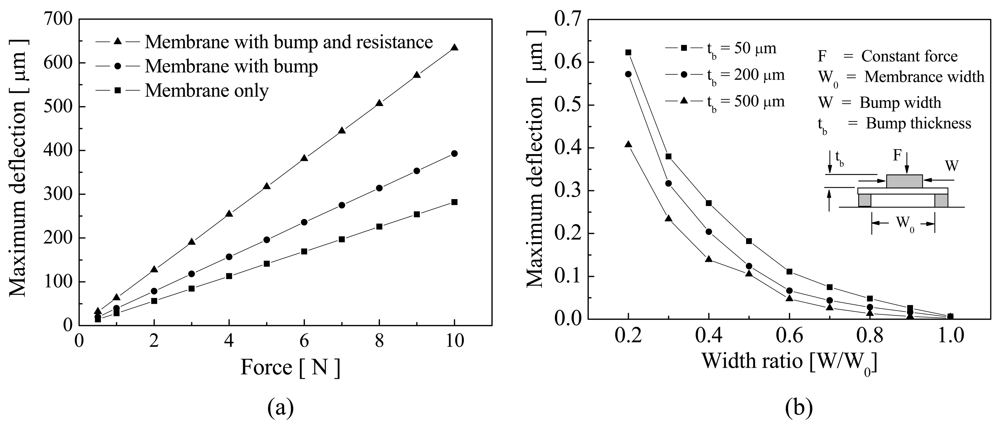
2.3. Mechanical Deflection
3. Results and Discussion
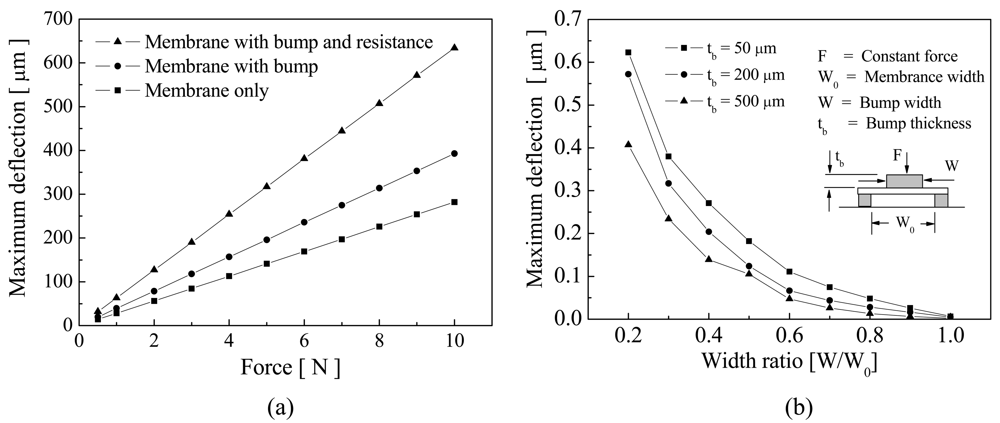
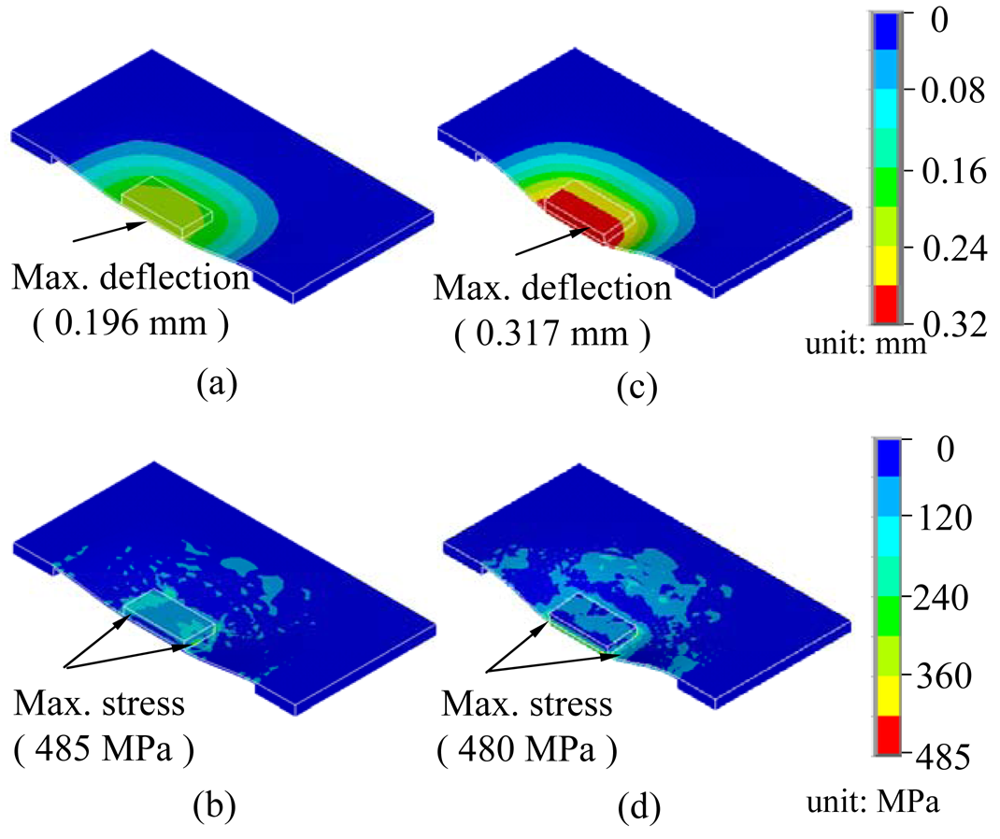
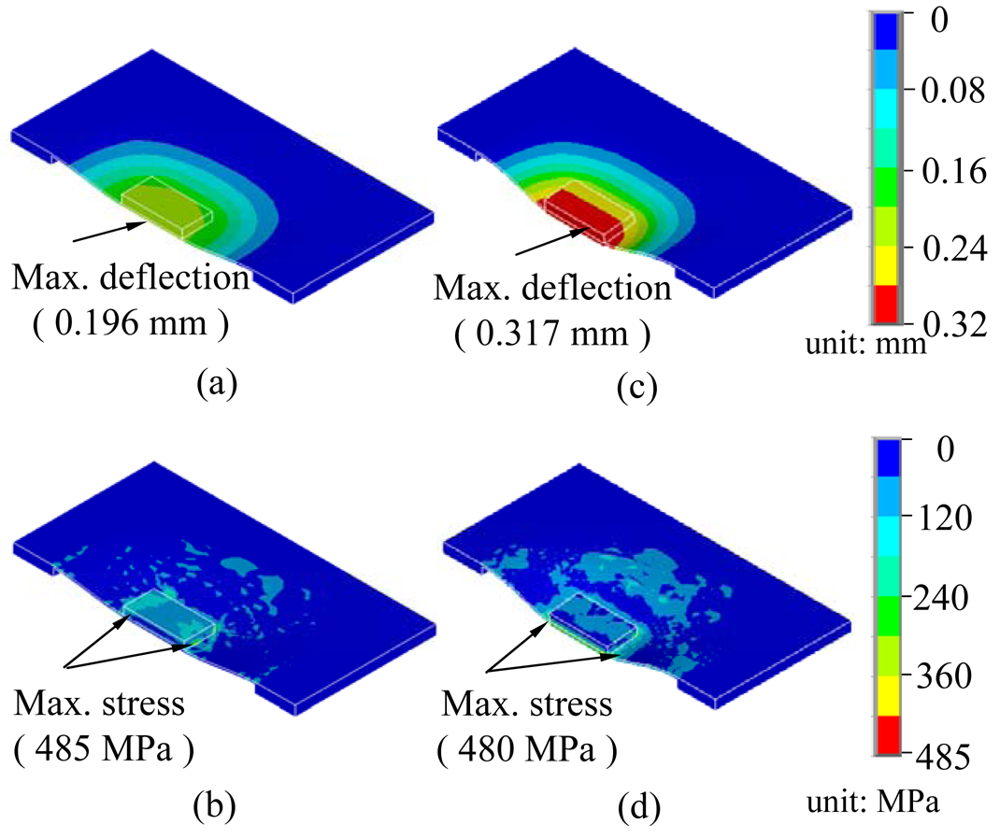
3.1. Finite Element Analysis
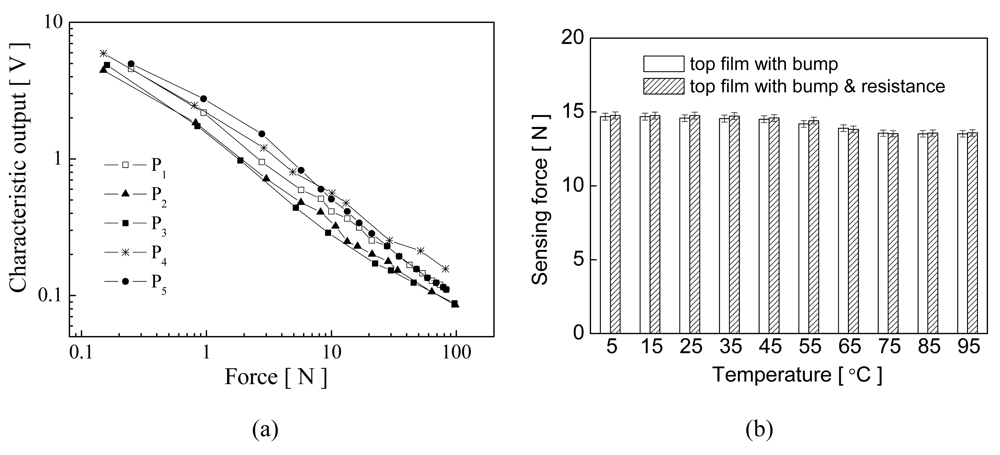
3.2. Printed Sensor Characteristics
3.3. Response Analyses
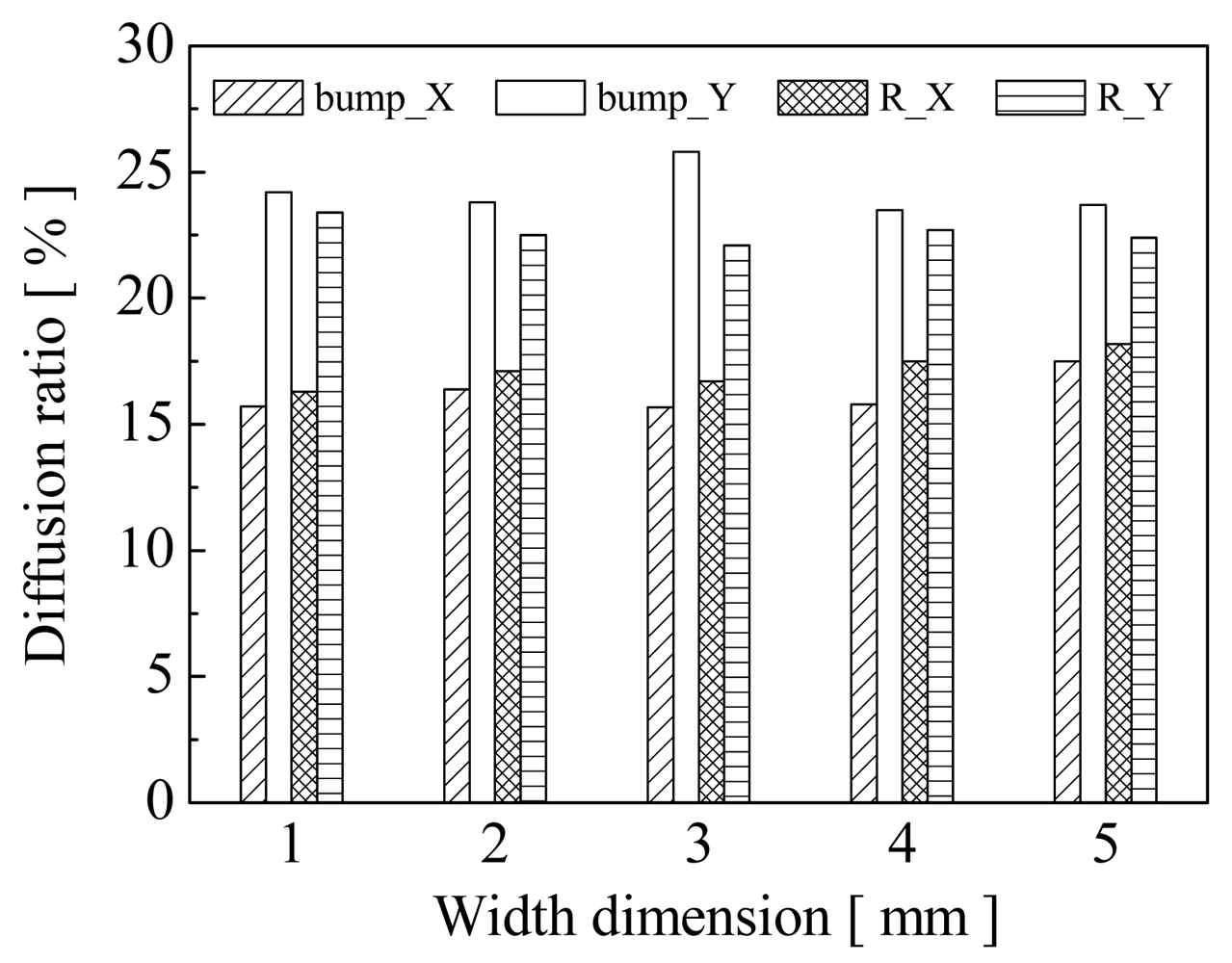
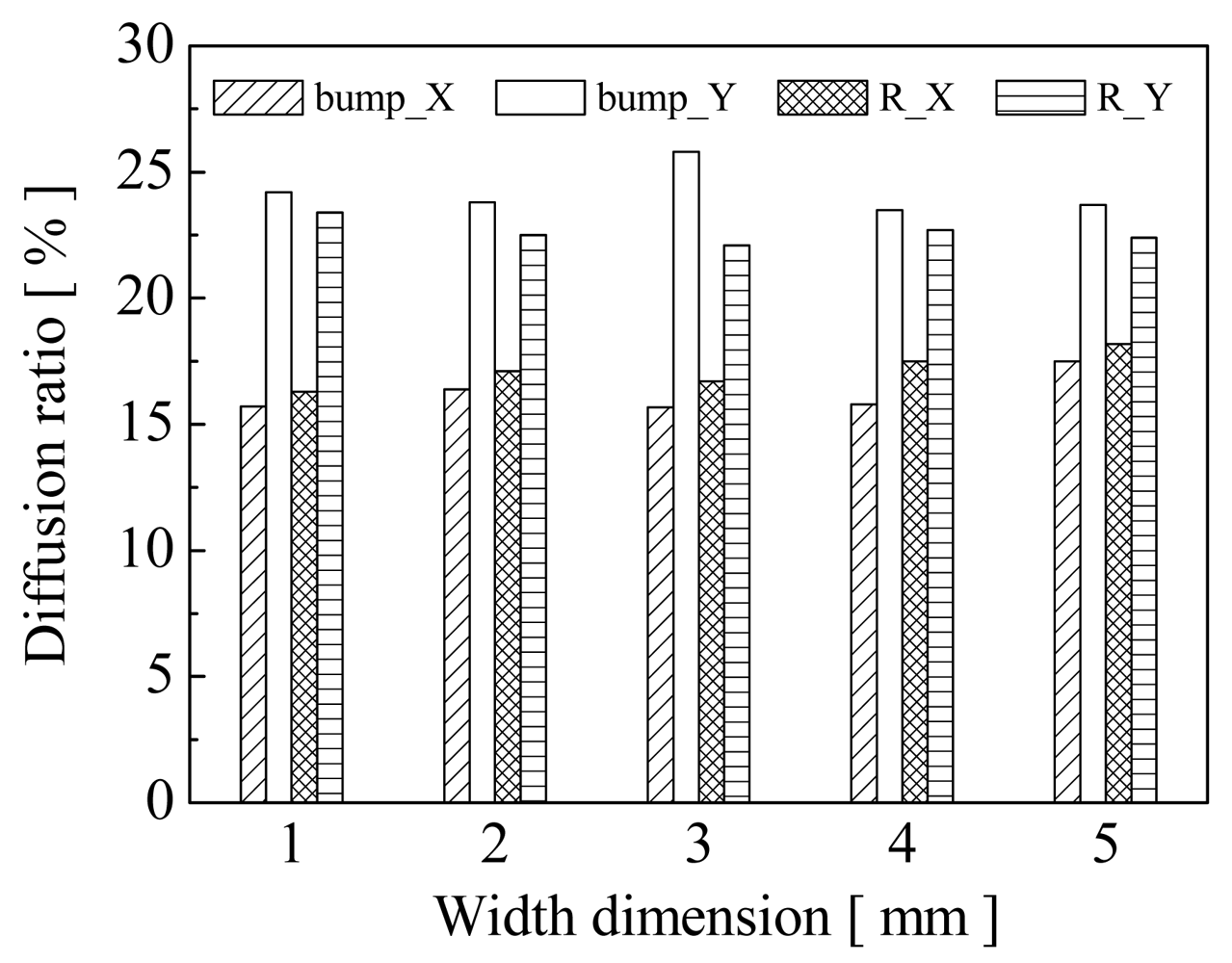
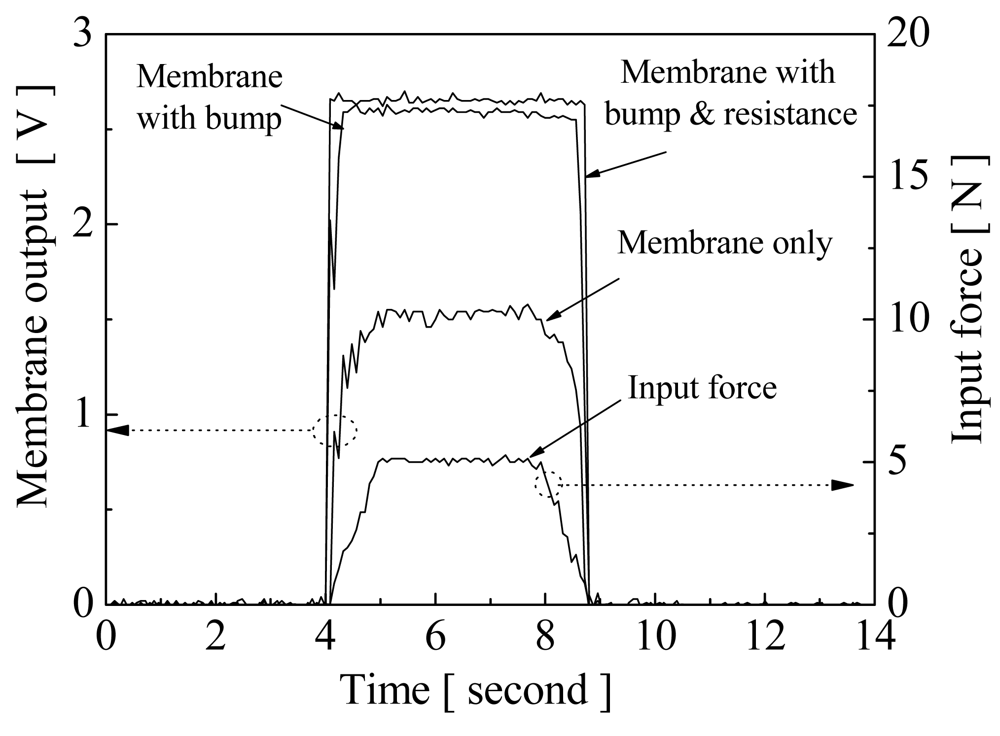
3.3.1. Bump Structure Effects
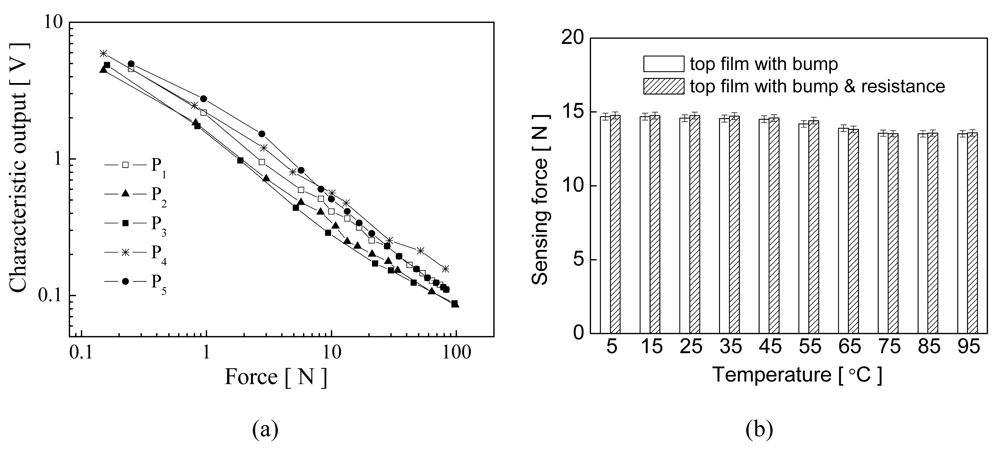
3.3.2. Contact Force Measurement
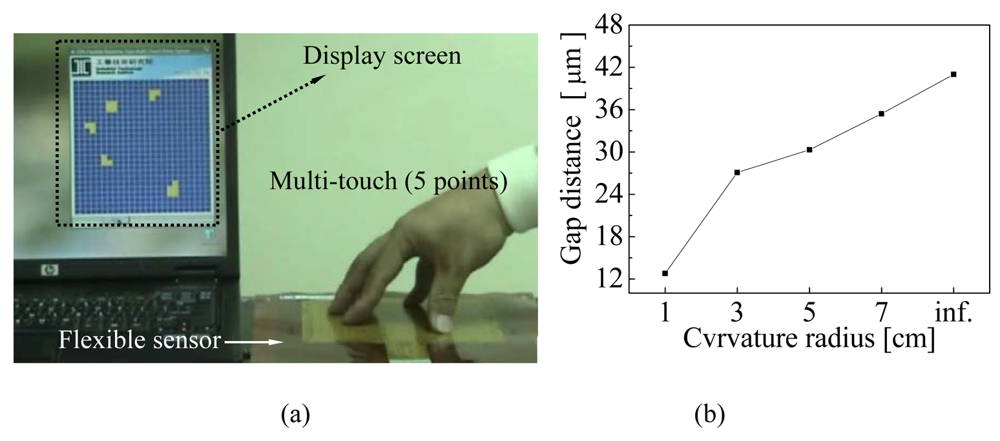
3.3.3. Performance Testing
4. Conclusions
Acknowledgments
References and Notes
- Agarwal, A.; Izadi, S.; Chandraker, M.; Blake, A. High precision multi-touch sensing on surfaces using overhead cameras. Horizontal Interactive Human-Computer Systems, 2007. TABLETOP '07. Second Annual IEEE International Workshop on; 2007; 1, pp. 197–200. [Google Scholar]
- Hodges, S.; Izadi, S.; Butler, A.; Rrustemi, A.; Buxton, B. ThinSight: versatile multi-touch sensing for thin form-factor displays. Proceedings of the 20th Annual ACM Conference on User Interface Software and Technology, Rhode Island, USA, October 2007; pp. 259–268.
- Wilson, A.D. PlayAnywhere: A compact interactive tabletop projection-vision system. Proceedings of the 18th annual ACM symposium on User interface software and technology, Washington, USA; 2005; pp. 83–92. [Google Scholar]
- Malik, S.; Laszlo, J. Visual Touchpad: A two-handed gestural input device. Proceedings of the 6th International Conference on Multimodal interfaces, State College Pennsylvania, USA; 2004; pp. 289–296. [Google Scholar]
- Rekimoto, J. SmartSkin: An infrastructure for freehand manipulation on interactive surfaces. Proceedings of the SIGCHI conference on Human factors in computing systems: Changing our world, changing ourselves, Minnesota, USA; 2002; pp. 113–120. [Google Scholar]
- Han, J.Y. Low-Cost multi-touch sensing through frustrated total internal reflection. Proceedings of the 18th annual ACM symposium on User interface software and technology, Washington, USA; 2005; pp. 115–118. [Google Scholar]
- Jobs, S.P.; Forstall, S.; Christie, G.; Lemay, S.O.; Herz, S.; van Os, M.; Ording, B.; Novick, G.; Westerman, W.C.; Chaudhri, I.; Coffman, P.L.; Kocienda, K.; Ganatra, N.K.; Anzures, F.A.; Wyld, J.A.; Bush, J.; Matas, M.; Marcos, P.D.; Pisula, C.J.; King, V.S.; Blumenberg, C.; Tolmasky, F.R.; Williamson, R.; Boule, A.M.J.; Lamiraux, H.C. Touch screen device, method, and graphical user interface for determining commands by applying heuristics. Apple Inc. Patent, US7479949, 2009. [Google Scholar]
- Perski, H.; Morag, M. Dual function input device and method. N-trig Ltd. Patent, US6762752, 2004. [Google Scholar]
- Drucker, S.M.; Wong, C.G. Selectable projector and imaging modes of display table. Microsoft Corporation Patent, US7134756, 2006. [Google Scholar]
- Dietz, P.; Leigh, D. DiamondTouch: A Multi-User Touch Technology. Proceedings of the 14th annual ACM symposium on User interface software and technology, Orlando, Florida; 2001; pp. 219–226. [Google Scholar]
- Sekitan, T.; Takamiya, M.; Noguch, Y.; Nakano, S.; Kato, Y.; Sakurai, T.; Someya, T. A large-area wireless power-transmission sheet using printed organic transistors and plastic MEMS switches. Nat. Mater. 2007, 6, 413–417. [Google Scholar]
- Lungenschmied, C.; Dennler, G.; Neugebauer, H.; Sariciftci, S.N.; Glatthaar, M.; Meyer, T.; Meyer, A. Flexible, long-lived, large-area, organic solar cells. Solar Energy Mater. Solar Cells 2007, 91, 379–384. [Google Scholar]
- Street, R.A.; Wong, W.S.; Ready, S.E.; Chabinyc, M.L.; Arias, A.C.; Limb, S.; Salleo, A. Lujan R. Jet printing flexible displays. Materials Today 2006, 9, 32–37. [Google Scholar]
- Tehrani, P.; Isaksson, J.; Mammo, W.; Andersson, M.R.; Robinson, N.D.; Berggren, M. Evaluation of active materials designed for use in printable electrochromic polymer displays. Thin Solid Films 2006, 515, 2485–2492. [Google Scholar]
- Wong, W.S.; Lujan, R.; Daniel, J.H.; Limb, S. Digital lithography for large-area electronics on flexible substrates. J. Non-Cryst. Solids 2006, 352, 1981–1985. [Google Scholar]
- Seol, Y.G.; Lee, J.G.; Lee, N.E. Effects of different electroplated gate electrodes on electrical performances of flexible organic thin film transistor and flexibility improvement. Org. Electron. 2007, 8, 513–521. [Google Scholar]
- Ko, S.H.; Chung, J.; Pan, H.; Grigoropoulos, C.P.; Poulikakos, D. Fabrication of multilayer passive and active electric components on polymer using inkjet printing and low temperature laser processing. Sens. Actuat. A-Phys. 2007, 134, 161–168. [Google Scholar]
- Manunza, I.; Bonfiglio, A. Pressure sensing using a completely flexible organic transistor. Biosens. Bioelectron. 2007, 22, 2775–2779. [Google Scholar]
- Xiao, S.Y.; Che, L.F.; Li, X.X.; Wang, Y.L. A novel fabrication process of MEMS devices on polyimide flexible substrates. Microelectron. Eng. 2008, 85, 452–457. [Google Scholar]
- Tan, Z.; Shikida, M.; Hirota, M.; Xing, Y.; Sato, K.; Iwasaki, T.; Iriye, Y. Characteristics of on-wall in-tube flexible thermal flow sensor under radially asymmetric flow condition. Sens. Actuat. A-Phys. 2007, 138, 87–96. [Google Scholar]
- Su, P.G.; Wang, C.S. Novel flexible resistive-type humidity sensor. Sens. Actuat. B-Chem. 2007, 123, 1071–1076. [Google Scholar]
- Recart, F.; Freire, I.; Perez, L.; Aurrekoetxea, R.L.; Jimeno, J.C.; Bueno, G. Screen printed boron emitters for solar cells. Solar Energy Mater. Solar Cells 2007, 91, 897–902. [Google Scholar]
- Taylor, A.D.; Kim, E.Y.; Humes, V.P.; Kizuka, J.; Thompson, L.T. Inkjet printing of carbon supported platinum 3-D catalyst layers for use in fuel cells. J. Power Sources 2007, 171, 101–106. [Google Scholar]
- Sanaur, S.; Whalley, A.; Alameddine, B.; Carnes, M.; Nuckolls, C. Jet-printed electrodes and semiconducting oligomers for elaboration of organic thin-film transistors. Org. Electron. 2006, 7, 423–427. [Google Scholar]
- Katayama, T.; Hakotani, M.; Shinohara, M.; Nishii, K.; Tabuchi, H. Effect of material internal pressure in curing process of SMC roll forming. J. Mater. Process. Technol. 2004, 155, 1577–1582. [Google Scholar]
- Xu, Y.; Jiang, F.; Newbern, S.; Huang, A.; Ho, C.M.; Tai, Y.C. Flexible shear-stress sensor skin and its application to unmanned aerial vehicles. Sens. Actuat. A-Phys. 2003, 105, 321–329. [Google Scholar]
- Kim, Y.S. Microheater-integrated single gas sensor array chip fabricated on flexible polyimide substrate. Sens. Actuat. B-Chem. 2006, 114, 410–417. [Google Scholar]
- Chang, W.Y.; Fang, T.H.; Lin, Y.C. Characterization and fabrication of wireless flexible physiological monitor sensor. Sens. Actuat. A-Phys. 2008, 143, 196–203. [Google Scholar]
- Chang, W.Y.; Fang, T.H.; Lin, Y.C. Physical characteristics of polyimide films for flexible sensors. Appl. Phys. A-Mat. Sci. Process. 2008, 92, 693–701. [Google Scholar]
- Vinson, J. R. The behavior of thin walled structures: beams, paltes and shells; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1989; pp. 9–18. [Google Scholar]
- Chouaf, A.; Malhaire, C.; Berre, M.L.; Dupeux, M.; Pourroy, F.; Barbier, D. Stress analysis at singular points of micromachined silicon membrane. Sens. Actuat. A-Phys. 2000, 84, 109–115. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | ThinSight [2] | Jeff Han [6] | Apple [7] | Microsoft surface [9] | Diamond Touch [10] | This work |
|---|---|---|---|---|---|---|
| Sensing | LED emitters and detectors | Infrared light and Camera | Mutual capacitance and force-sensing | Infrared and projector | Antenna and projector | Organic resistance |
| Technology | Digital I/O driving and Standard bicubic interpolation | Frustrated total internal reflection | Projected capacitive technology | Digital light processing technology | Transmitting technology | Algorithm matrix operating |
| Controller | Microcontroller and PC | Bulky equipment | Microcontroller | Bulky equipment | computer | Microcontroller |
| Surface | Acrylic | Acrylic pane | Glass substrate | Acrylic screen | Fiber glass | Polyimide |
| Flexible | Difficult | Difficult | Difficult | Difficult | Difficult | Feasible |
| Sensor | Embedding | Embedding | Embedding | Embedding | - | Screen printing |
| Cost | Medium | Medium | Medium | High | High | Low |
© 2009 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Chang, W.-Y.; Fang, T.-H.; Yeh, S.-H.; Lin, Y.-C. Flexible Electronics Sensors for Tactile Multi-Touching. Sensors 2009, 9, 1188-1203. https://doi.org/10.3390/s9021188
Chang W-Y, Fang T-H, Yeh S-H, Lin Y-C. Flexible Electronics Sensors for Tactile Multi-Touching. Sensors. 2009; 9(2):1188-1203. https://doi.org/10.3390/s9021188
Chicago/Turabian StyleChang, Wen-Yang, Te-Hua Fang, Shao-Hsing Yeh, and Yu-Cheng Lin. 2009. "Flexible Electronics Sensors for Tactile Multi-Touching" Sensors 9, no. 2: 1188-1203. https://doi.org/10.3390/s9021188
APA StyleChang, W.-Y., Fang, T.-H., Yeh, S.-H., & Lin, Y.-C. (2009). Flexible Electronics Sensors for Tactile Multi-Touching. Sensors, 9(2), 1188-1203. https://doi.org/10.3390/s9021188