Evaluation of the Convergence Region of an Automated Registration Method for 3D Laser Scanner Point Clouds

Abstract
:1. Introduction
- -
- Finding correct correspondence from either selected point-to-point or point-to-surface pairs.
- -
2. Automated registration method for 3D point clouds
2.1. Metrics for finding correspondence between two point clouds
2.2. Description of the proposed algorithm: GP-ICP
- Find the k neighbourhood points of every point in two point clouds named C1 and C2. Estimate the geometric primitives of the points.
- Take initial sample points, , whose change of curvature is greater than where niter=i is the number of sample in the ith iteration where is the threshold of the angle between the normal vector in the ith iteration. Note that is the threshold values for the difference in the estimated surface normal vectors in the ith iteration.
- Find corresponding points of . is the corresponding point of ifwhere is the threshold for the difference in the changes of geometric curvature between the corresponding points.
- Calculate the approximate transformation, Triter=i, and transform C1. Rotate the normal vectors of all points of C1 as well.
- Update the threshold values in order to apply a stricter criterion for determination of possible corresponding points as follow.
- Calculate the registration error, εiter=i, which is defined as the rms distance of points and their corresponding surfaces in our method. If εiter=i is greater than threshold, then go to step Otherwise stop the registration. In addition, if εiter=i is smaller than TεCM, for example, the average distance of a point from its neighbourhood, then Chen and Medioni's method is used since it converges quickly than Horn's algorithm does if the point clouds are close. Otherwise Horn's method is used.
3. Experimental
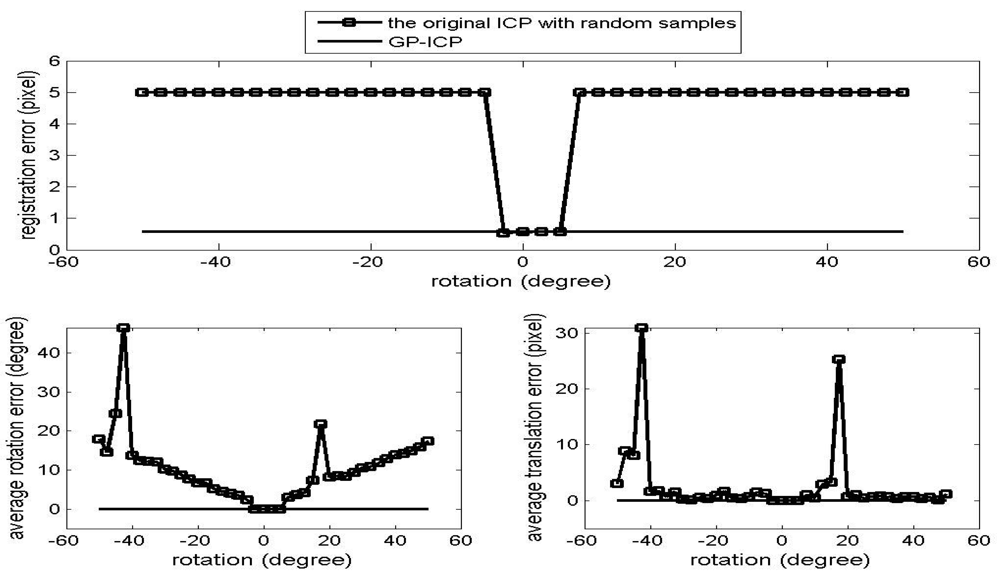
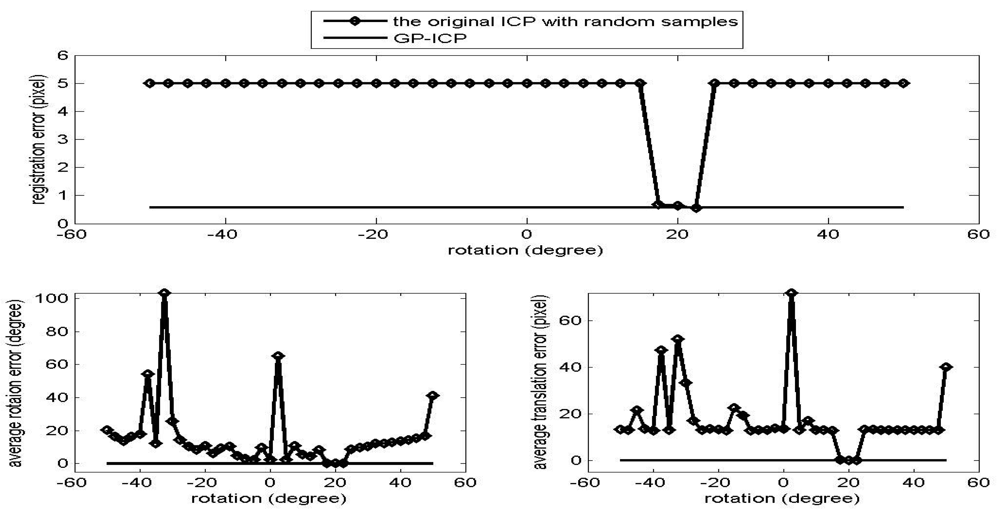
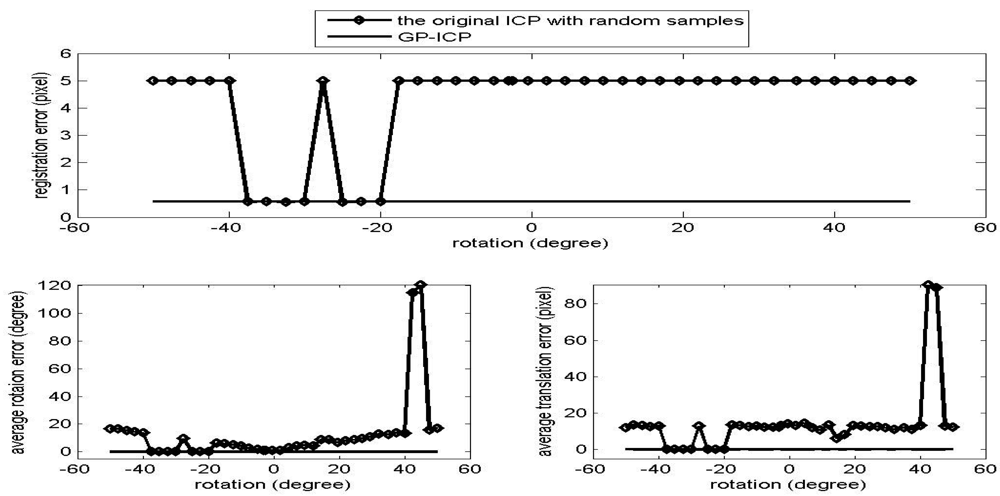
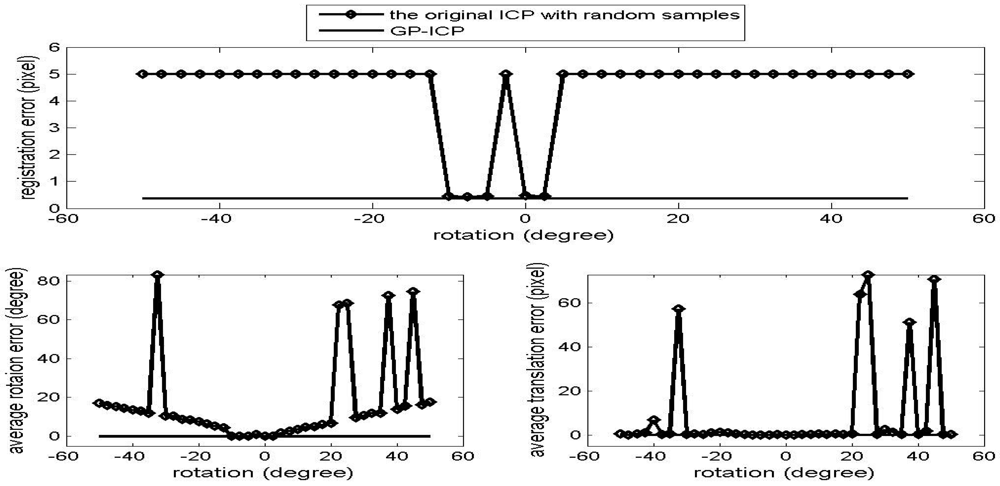
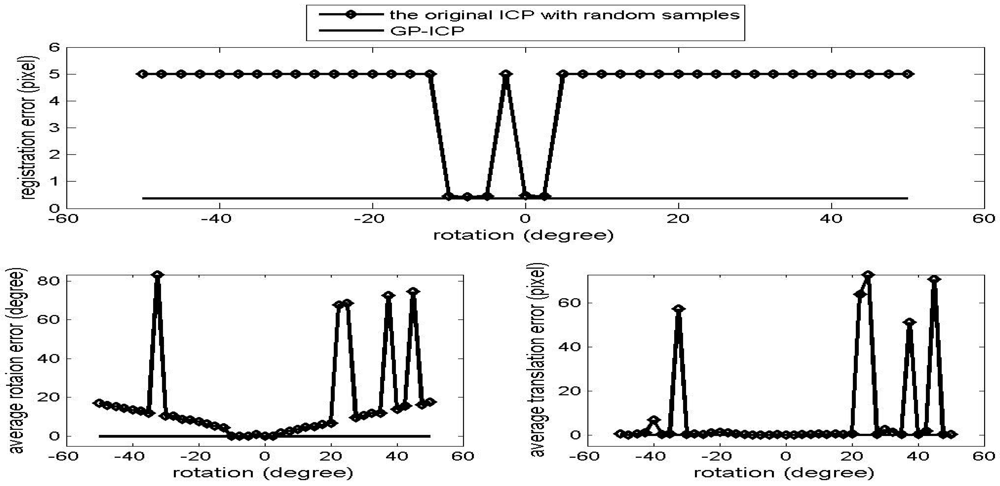
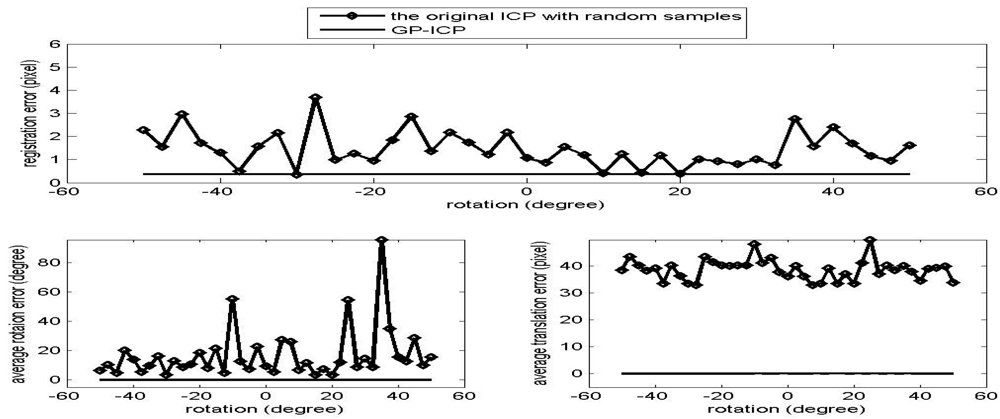
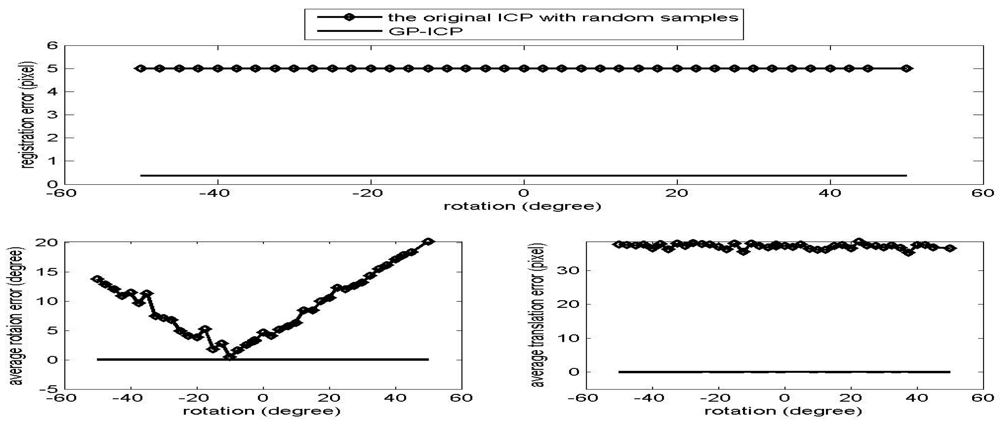
3.1. Simulated data study
- -
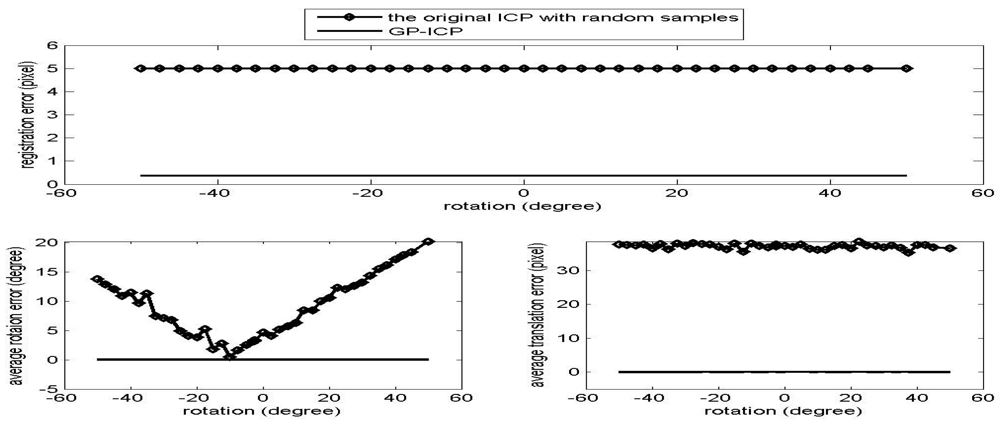
- These tests for the convergence region were conducted with the GP-ICP since the convergence region does not heavily depend on whether or not the proposed RANSAC procedure is used, from the fact that the same method for finding correspondence is used in both methods.
- -
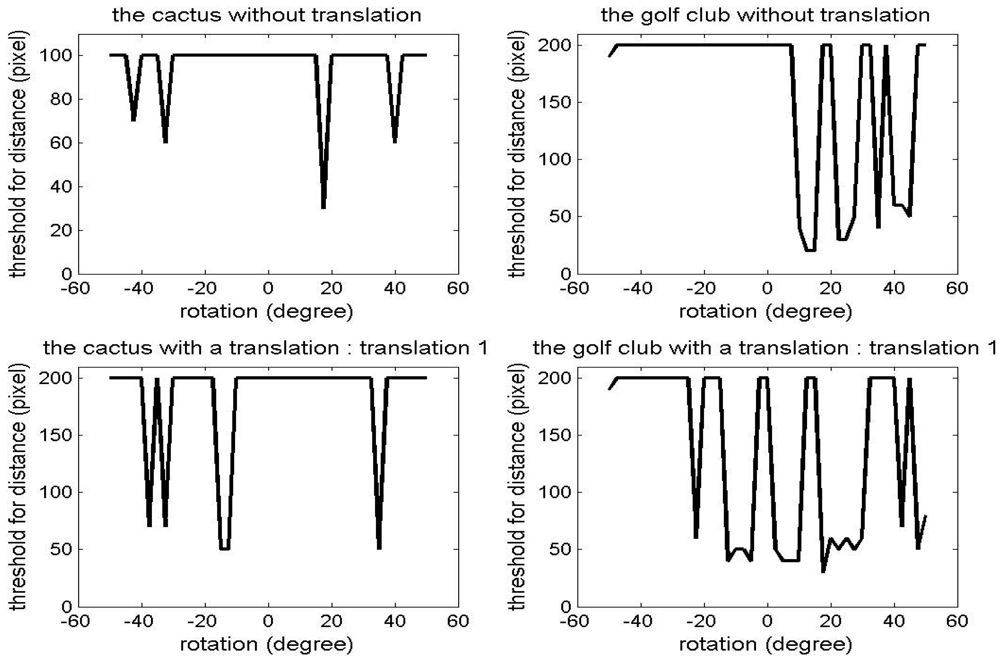
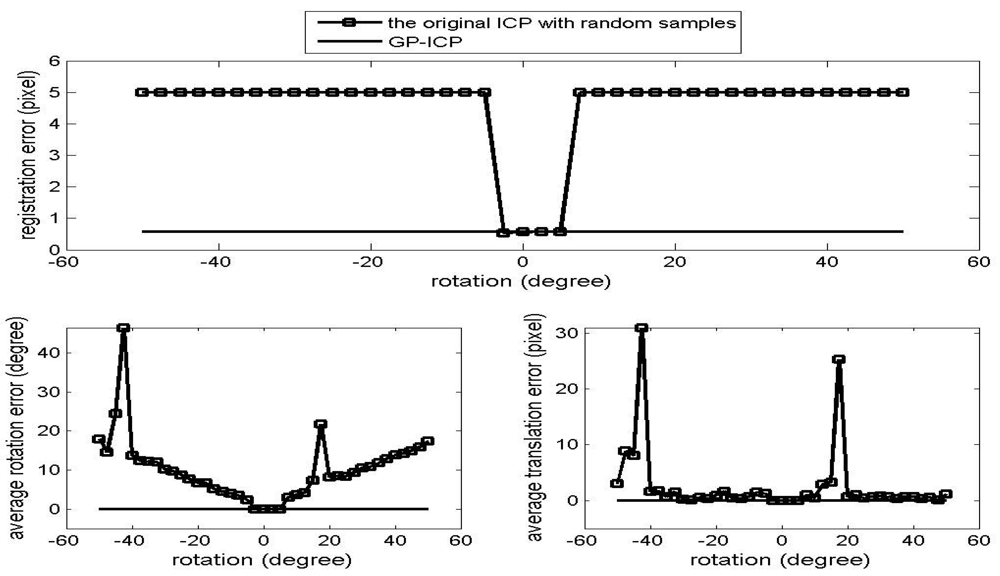
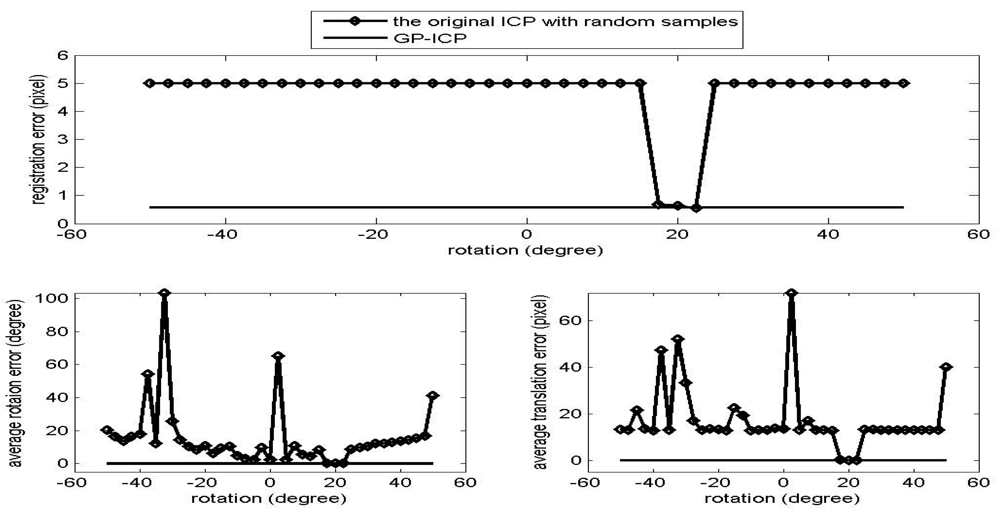
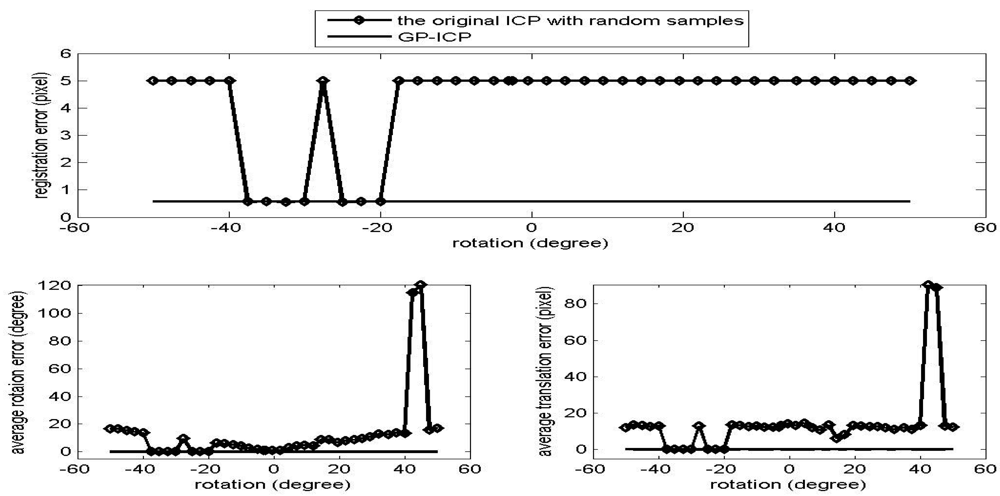
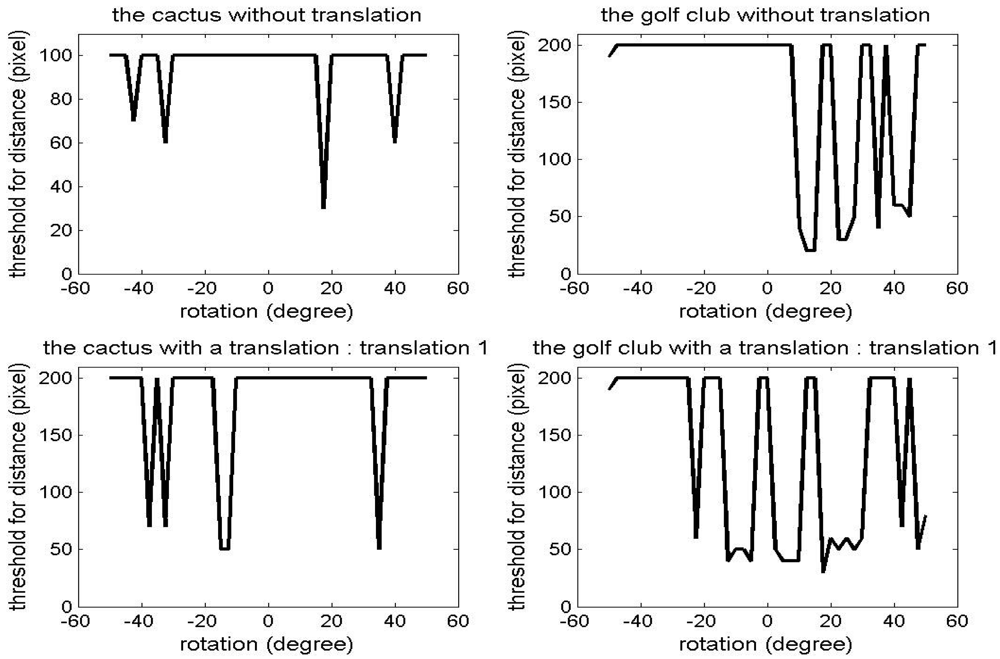
- The cactus and the golf club were used for the tests. In all the tests, these simulated point clouds were rotated by a fixed amount, -50° < Rinitial < 50°, where Rinitial is a rotational angle around an axis. For translations, three kinds of the tests were performed coinciding with the Rinitial : no translation, a translation of (H/4, L/4, W/2) named translation 1, and a translation of (-H/4, L/4, W/2) named translation 2, where H, L, and W are the height, length, and the width of either the cactus or the golf club, respectively.
- -
- was set to be Rinitial + 10° and it was changed from a maximum value of a test point cloud to zero with increment of 10 pixel. For example, in the test either by the GP-ICP or the original ICP with random sampling, a new is tried unless the solution of a registration algorithm converges, until reaches to zero. Therefore, if the final is zero, it means that the registration algorithm did fail to find a solution within a maximum .
3.2. Real case study with close-range laser scanner
- -
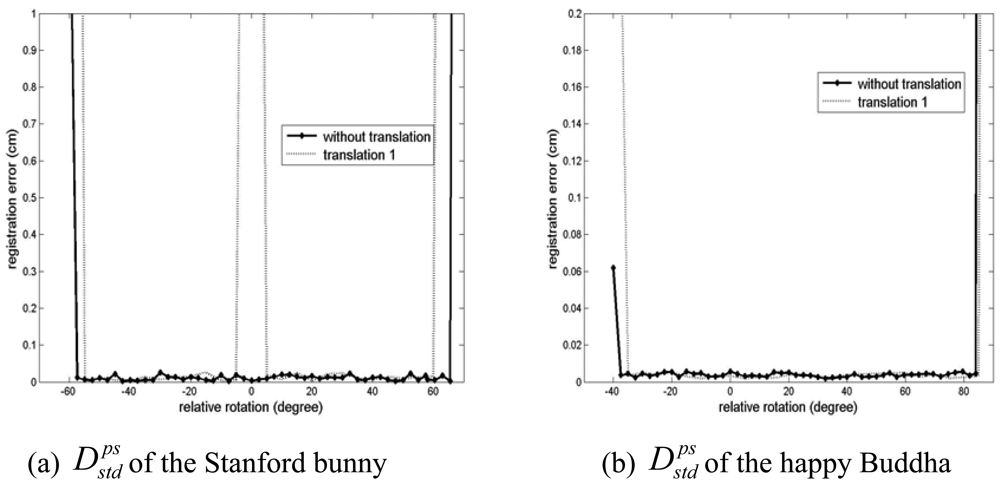
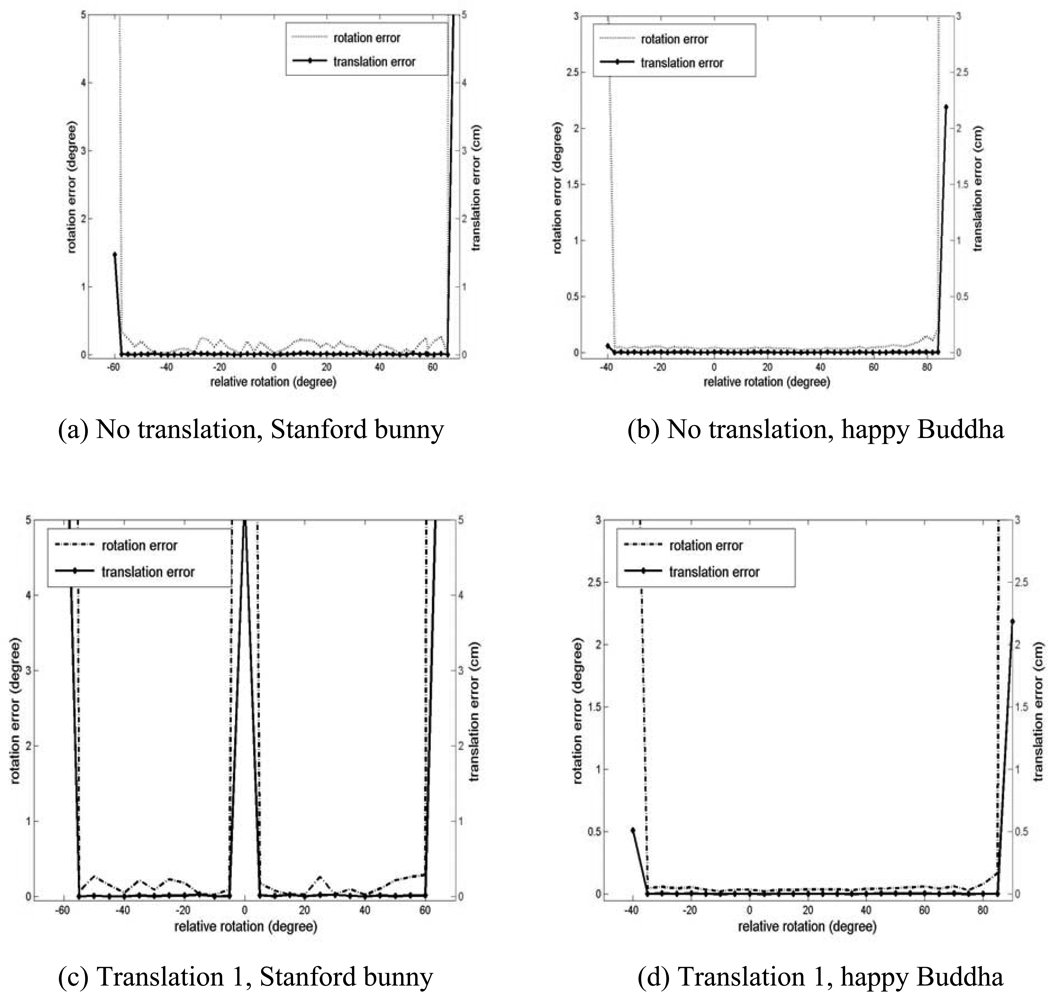
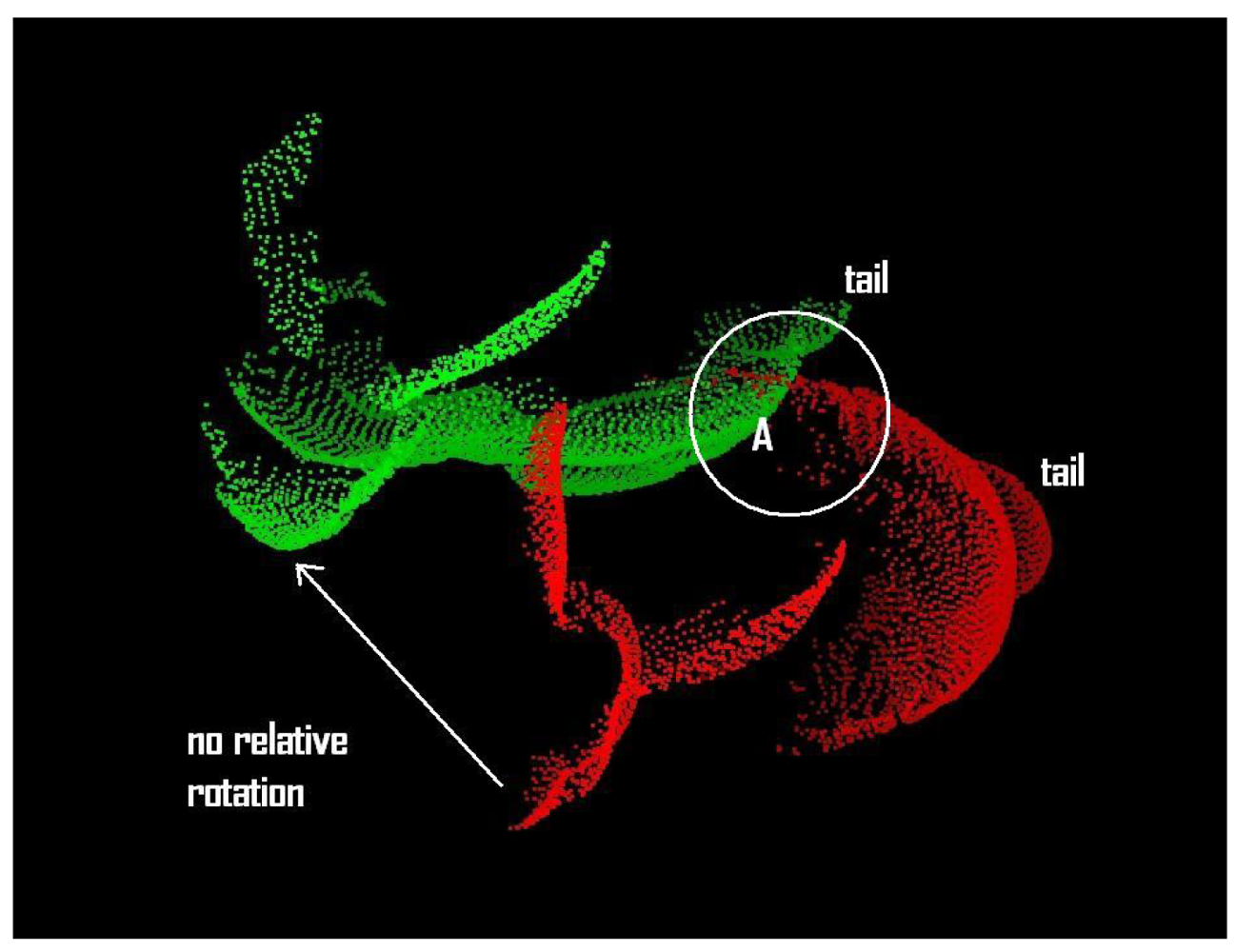
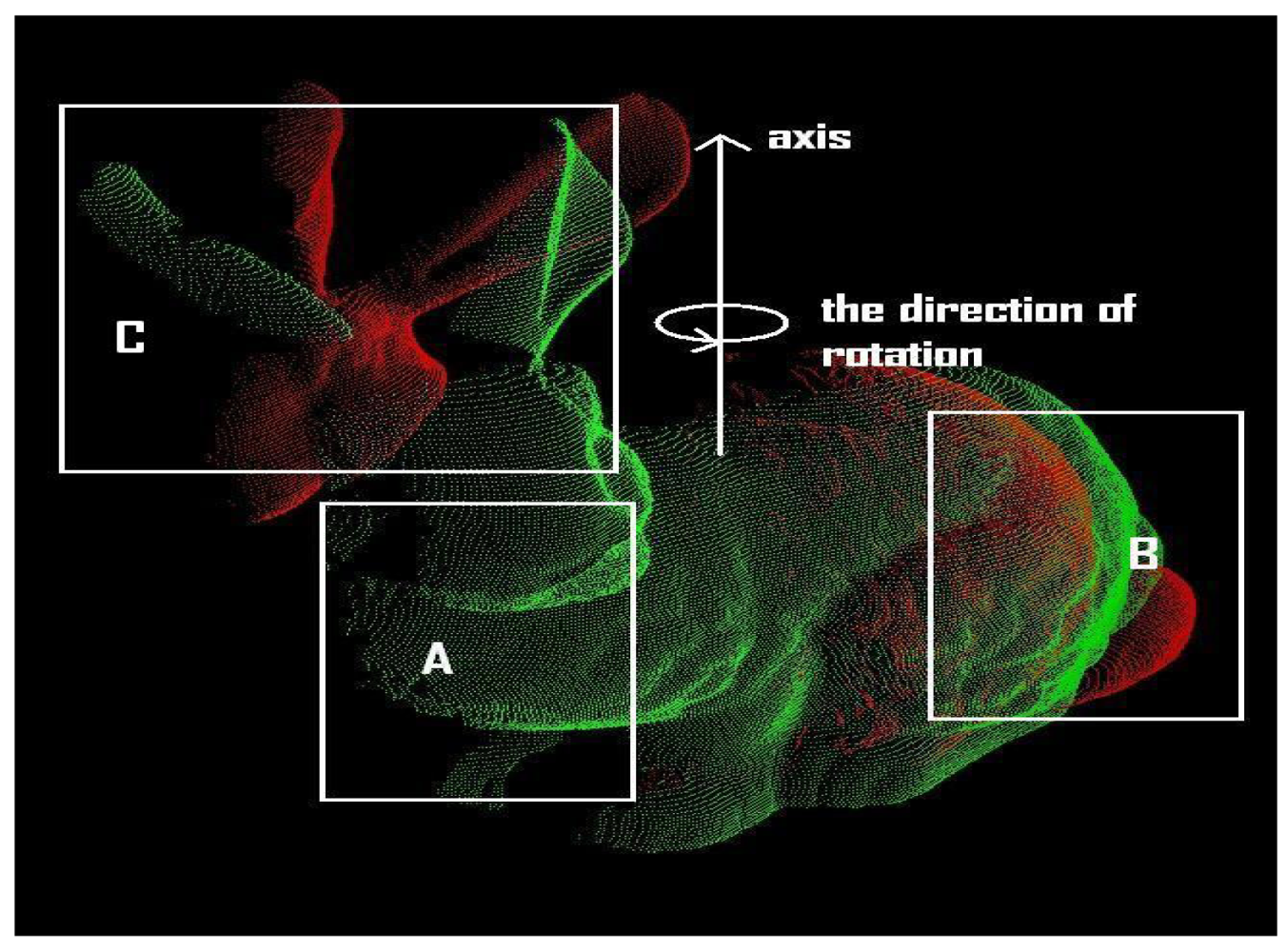
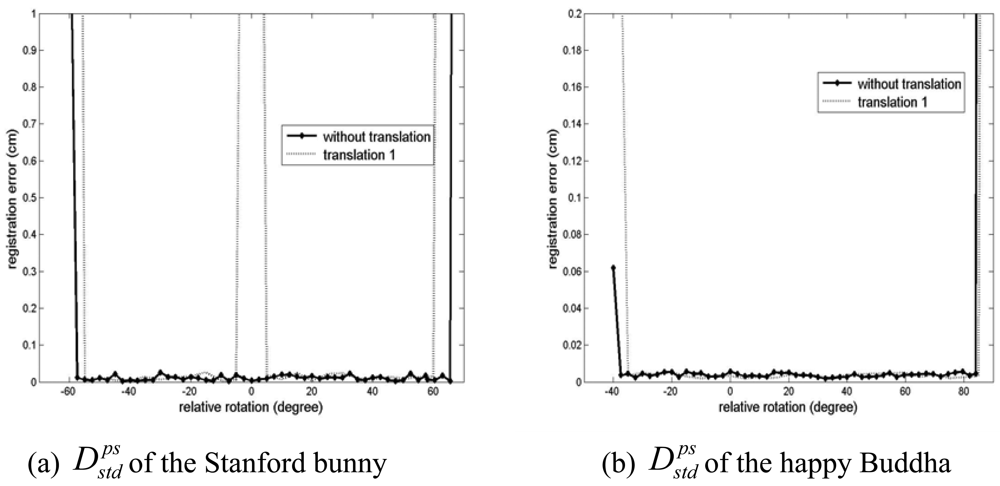
- Unlike the convergence region tests with the simulated data, the Stanford bunny and the happy Buddha were, from the registered state, rotated around an axis in both clockwise and counter-clockwise until the GP-ICP fails to obtain a solution. Therefore, a point cloud's rotational convergence region can be asymmetric, e.g. -40° < Rinitial < 20°, where Rinitial is the rotational convergence region of a point cloud.
- -
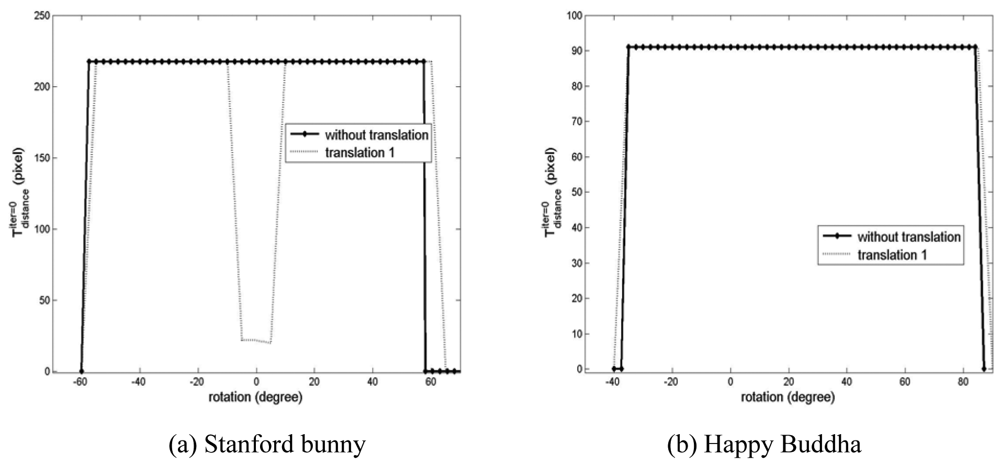
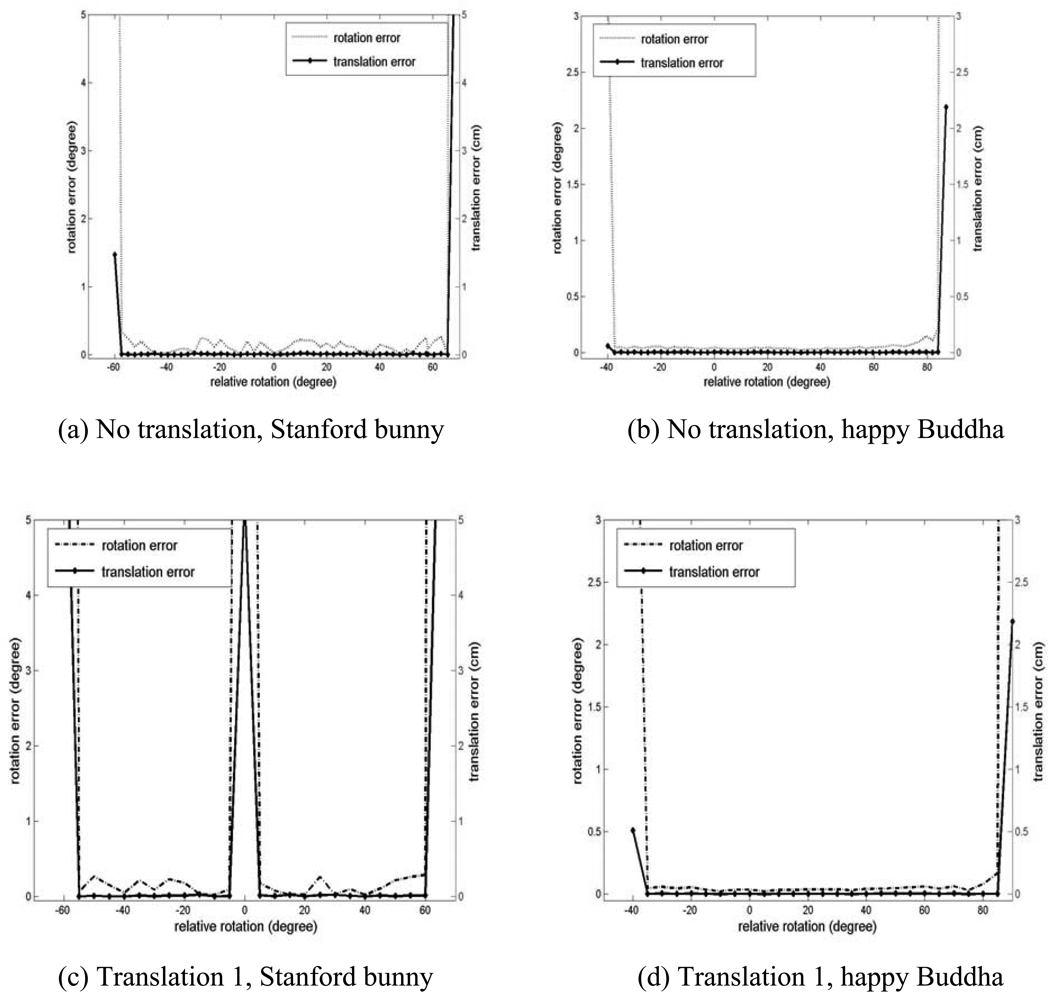
- Since the true transformation was known and this test was designed to evaluate the convergence region of the GP-ICP, the algorithm was stopped if the difference between the true and the estimated transformation parameters was sufficiently small, regardless of the magnitude of the registration error in the last iteration. In other words, in this test, the GP-ICP did not try to find the smallest possible registration error. Therefore, in the plot of in Figure 8, a little fluctuation is observed in the registration errors. In addition, a similar fluctuation is observed in the errors of the estimated transformation parameters as shown in Figure 9.
- -
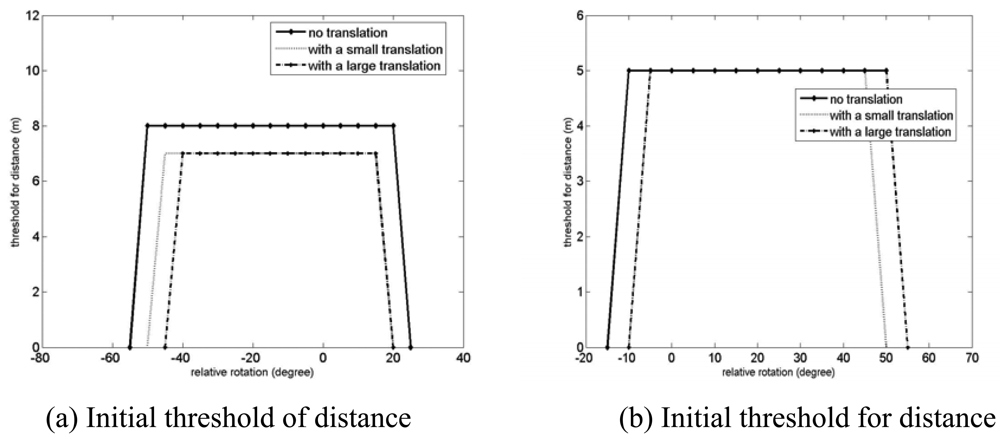
- was again set to be Rinitial + 10°. A threshold for distance, , was changed from a maximum value to zero with increment of 5cm. As stated in Section 3.1, if the final is zero, it means that a registration algorithm failed to find a good solution.
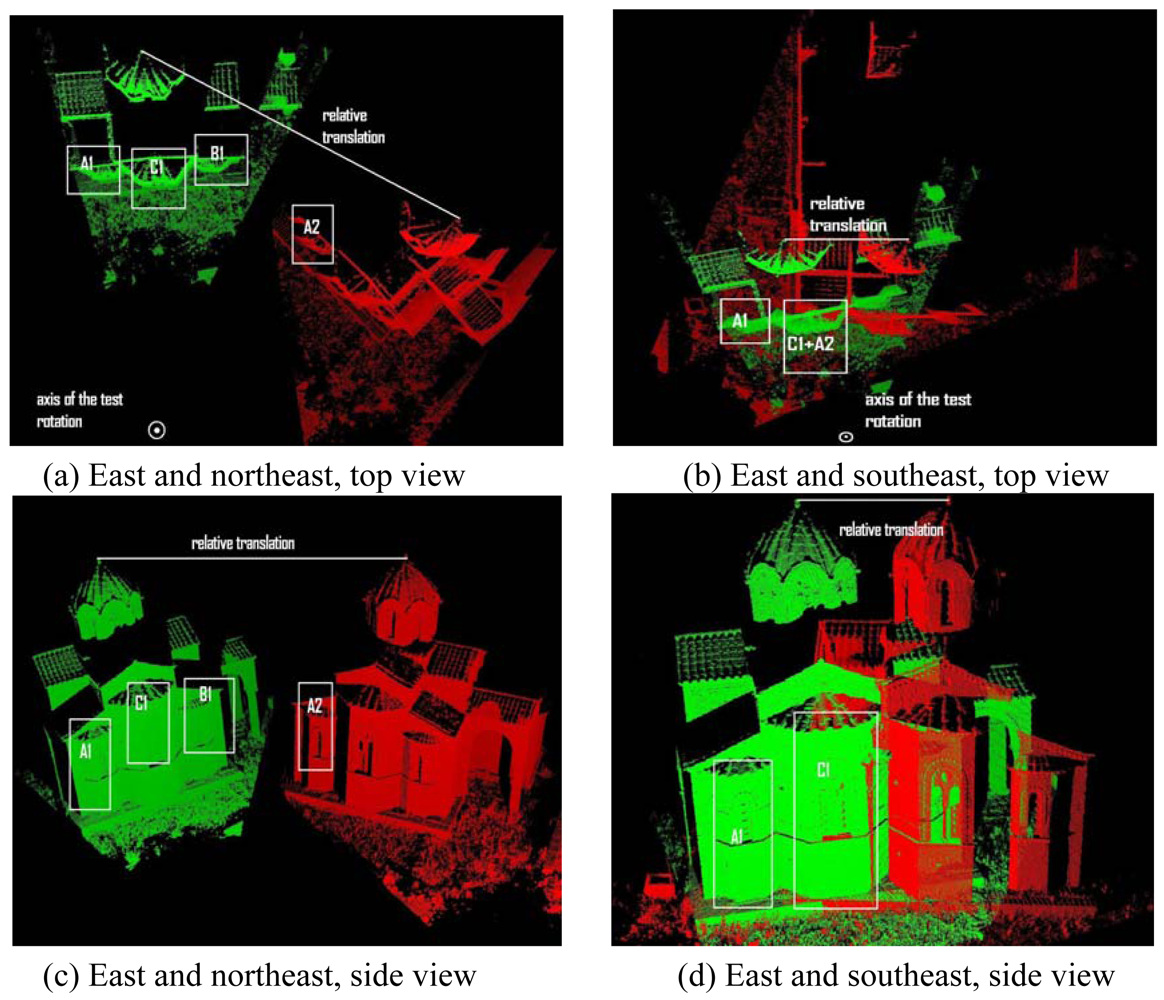
3.3. Real case study with terrestrial laser scanner
4. Conclusions
Acknowledgments
References
- Bae, K.-H. Automated registration of unorganised point clouds from terrestrial laser scanners. PhD thesis, Department of Spatial Sciences, Curtin University of Technology, Perth, Australia, 2006. [Google Scholar]
- Bae, K.-H.; Lichti, D.D. Automated registration of unorganised point clouds from terrestrial laser scanners. Int. Arch. Photogram. Rem. Sens. 2004, 35(Part B5), 222–227. [Google Scholar]
- Bae, K.-H.; Lichti, D.D. A method for automated registration of unorganised point clouds. ISPRS J. Photogramm. Remote Sens. 2008, 63, 36–54. [Google Scholar]
- Bae, K.-H.; Belton, D.; Lichti, D.D. A framework for position uncertainty of unorganized three-dimensional point clouds from near-monostatic laser scanners using covariance analysis. Int. Arch. Photogram. Rem. Sens. Spatial Inform. Sci. 2005, 36(Part 3/W19), 7–12. [Google Scholar]
- Bae, K.-H.; Belton, D.; Lichti, D.D. Pre-processing procedures for raw point clouds from terrestrial laser scanners. J. Spatial Sci. 2007, 52, 65–74. [Google Scholar]
- Barnea, S.; Filin, S. Keypoint based autonomous registration of terrestrial laser point clouds. ISPRS J. Photogram. Rem. Sens. 2008, 63, 19–35. [Google Scholar]
- Besl, P.J.; McKay, N.D. A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar]
- Brenner, C.; Dold, C.; Ripperda, N. Coarse orietation of terrestrial laser scans in urban environments. ISPRS J. Photogram. Rem. Sens 2008, 61, 4–18. [Google Scholar]
- Campbell, R.J.; Flynn, P.J. A survey of free-form object representation and recognition techniques. Comput. Vision Image Understand. 2001, 81, 166–210. [Google Scholar]
- Chen, Y.; Medioni, G. Object modelling by registration of multiple range images. Image Vision Comput. 1992, 10, 145–155. [Google Scholar]
- Chua, C.S.; Jarvis, R. 3D free-form surface registration and object recognition. Int. J. Comput. Vision. 1996, 17, 77–99. [Google Scholar]
- Curless, B.; Levoy, M. A volumetric method for building complex models from range images. Proceedings of Association for Computing Machinery (ACM) Special Interest Group on Computer Graphics and Interactive Techniques (SIGGRAPH) '96; 1996; pp. 303–312. [Google Scholar]
- Cyberware Homepage. http://www.cyberware.com/ (accessed on 10th April 2007).
- Dold, C. Extended Gaussian images for the registration of terrestrial scan data. Int. Arch. Photogram. Rem. Sens. Spatial Inform. 2005, 36(Part 3/W19), 180–185. [Google Scholar]
- Dyn, N.; Hormann, K.; Kim, S.-J.; Levin, D. Optimizing 3D triangulations using discrete curvature analysis. Proc. of Mathematical methods for curves and surfaces (Oslo '2000); 2001; pp. 135–146. [Google Scholar]
- Fitzgibbon, A. Robust registration of 2D and 3D point sets. Image Vision Comput. 2003, 21, 1145–1153. [Google Scholar]
- Frank, T.; Tertois, A.-L.; Mallet, J.-L. 3D-reconstruction of complex geological interfaces from irregularly distributed and noisy point data. Comput. Geosci. 2007, 33, 932–943. [Google Scholar]
- Golub, G.H.; Loan, C.F.V. Matrix computations, 2nd Edition ed; Johns Hopkins University Press: Baltimore, Maryland, 1989. [Google Scholar]
- Gruen, A.; Akca, D. Least squares 3D surface and curve matching. ISPRS J. Photogram. Rem. Sens. 2005, 59, 151–174. [Google Scholar]
- Haralick, R.M.; Joo, H.; Lee, C.H.; Zhang, X.; Vaidya, V.G.; Kim, M.B. Pose estimation from corresponding point data. IEEE Trans. Syst. Man Cybern. 1989, 19, 1426–1446. [Google Scholar]
- Higuchi, K.; Hebert, M.; Ikeuchi, K. Building 3-D models from unregistered range images. Graph. models image Process. 1995, 57, 315–333. [Google Scholar]
- Hoppe, H.; DeRose, T.; Duchamp, T.; McDonald, J.; Stuetzle, W. Surface reconstruction from unorganized points. Comput. Graphics. 1992, 26, 71–78. [Google Scholar]
- Horn, B.K.P. Extended Gaussian images. Proc. IEEE 1984, 72, 1671–1684. [Google Scholar]
- Horn, B.K.P. Closed-form solution of absolute orientation using unit quaternions. J. Opt. Soc. Am. 1987, 4, 629–642. [Google Scholar]
- Johnson, A.E.; Hebert, M. Using spin images for efficient object recognition in cluttered 3D scenes. IEEE Trans. Pattern Anal. Mach. Intell. 1999, 21, 433–449. [Google Scholar]
- Masuda, T.; Yokoya, N. A robust method for registration and segmentation of multiple range images. Comput. Vision Image Understand. 1995, 61, 295–307. [Google Scholar]
- Miliaresis, G.; Kokkas, N. Segmentation and object-based classification for the extraction of the building class from LIDAR DEMs. Comput. Geosci. 2007, 33, 1076–1087. [Google Scholar]
- Pauly, M.; Mitra, N.J.; Guibas, L.J. Uncertainty and variability in point cloud surface data. Proc. of Eurographics Symposium on Point-based Graphics; 2004; pp. 77–84. [Google Scholar]
- Pottmann, H.; Huang, Q.-X.; Yang, Y.-L.; Hu, S.-M. Geometry and convergence analysis of algorithms for registration of 3d shapes. Int. J. Comput. Vision. 2006, 67, 277–296. [Google Scholar]
- Rabbani, T.; Dijkman, S.; van den Heuvel, F.; Vosselman, G. An integrated approach for modelling and global registration of point clouds. ISPRS J. Photogram. Rem. Sens. 2007, 61, 355–370. [Google Scholar]
- Rodrigues, M.; Fisher, R.; Liu, Y. Special issue on registration and fusion of range images. Comput. Vision Image Understand. 2002, 87, 1–7. [Google Scholar]
- Rusinkiewicz, S.; Levoy, M. Efficient variant of the ICP algorithm. Proc. of 3-D Digital Imaging and Modelling (3DIM); 2001; pp. 145–152. [Google Scholar]
- Sharkarji, C.M. Least-squares fitting algorithms of the NIST algorithm testing system. J. Res. Natl. Inst. Stand. Technol. 1998, 103, 633–641. [Google Scholar]
- Sharp, G.C.; Lee, S.W.; Wehe, D.K. ICP registration using invariant features. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 90–102. [Google Scholar]
- The Stanford 3D Scanning Repository. Stanford Computer Graphic Laboratory Homepage. http://graphics.stanford.edu/ (accessed on 10th April 2007).
- Suárez, J.C.; Ontiveros, C.; Smith, S.; Snape, S. Use of airborne LiDAR and aerial photogrammetry in the estimation of individual tree heights in forestry. Comput. Geosci. 2005, 31, 253–262. [Google Scholar]
- Tang, C.-K.; Medioni, G. Curvature-augmented tensor voting for shape inference from noisy 3d data. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 858–864. [Google Scholar]
- Umeyama, S. Least squares estimation of transformation parameters between two patterns. IEEE Trans. Pattern Anal. Mach. Intell. 1991, 13, 376–380. [Google Scholar]
- Zhang, Z. Iterative point matching for registration of free-form curves and surfaces. Int. J. Comput. Vision 1994, 13, 119–152. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Threshold | Description |
|---|---|
| k | Number of neighbourhood |
| Initial sampling threshold for the change of curvature | |
| Initial threshold for the difference in charge of curvature | |
| Initial threshold for the angle between normal vectors | |
| ΔT{sample,cc,normal} | Increment for ΔT{sample,cc,normal} |
| ΔTεCM | Threshold for starting Chen and Medioni's method |
| Tε | Threshold for stopping the algorithm |
| Point cloud 1 | Point cloud 2 | |
|---|---|---|
| Cactus | 179/519 = 34% | 179/545 = 33% |
| Gold club | 622/1371 = 45% | 622/1861 = 33% |
© 2009 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Bae, K.-H. Evaluation of the Convergence Region of an Automated Registration Method for 3D Laser Scanner Point Clouds. Sensors 2009, 9, 355-375. https://doi.org/10.3390/s90100355
Bae K-H. Evaluation of the Convergence Region of an Automated Registration Method for 3D Laser Scanner Point Clouds. Sensors. 2009; 9(1):355-375. https://doi.org/10.3390/s90100355
Chicago/Turabian StyleBae, Kwang-Ho. 2009. "Evaluation of the Convergence Region of an Automated Registration Method for 3D Laser Scanner Point Clouds" Sensors 9, no. 1: 355-375. https://doi.org/10.3390/s90100355
APA StyleBae, K.-H. (2009). Evaluation of the Convergence Region of an Automated Registration Method for 3D Laser Scanner Point Clouds. Sensors, 9(1), 355-375. https://doi.org/10.3390/s90100355