1. Introduction
With recent advances in wireless technologies, wireless control systems (WCSs) are attracting increasing attention from both academia and industry [
1-
4]. In a WCS, spatially distributed nodes of sensors, controllers and/or actuators are interconnected with wireless links. The use of wireless technologies in control applications has many advantages compared to wired networked control systems that are dominant at the moment. For instance, wireless networks allow flexible installation and maintenance, mobile operation, and monitoring and control of equipments in hazardous and difficult-to-access environments. Another important factor that instigates the deployment of wireless sensor/actuator networks is their relatively cheaper costs.
However, wireless communications raise new challenges for control system analysis and design. Wireless channels have adverse properties, such as path loss, multi-path fading, adjacent channel interference, Doppler shifts, and half-duplex operations [
1]. While traditional wired networks usually have fixed communication capacity, the link capacity of wireless channels may vary significantly over time [
5-
7]. Because the operations of wireless transceivers are half-duplex, wireless systems cannot support non-destructive medium access control (MAC) protocols. From the control point of view, communication networks introduce problems related to delay, packet losses, and jitters. Compared with wirelines, wireless links make these problems more pronounced [
8,
9]. For instance, the bit error rate of a wireless channel is typically several times higher than that of a wired connection [
10]. These phenomena degrade the quality of control (QoC), or even cause system instability in extreme circumstances [
5,
11].
The area of WCSs is still in its infancy. The suitability of diverse wireless technologies for control applications has been studied through both simulations [
12-
14] and experiments [
7,
10,
15]. A number of proposals on modifying established communication mechanisms for wireless networks to achieve real-time guarantees have been presented, e.g. [
16,
17]. Some other researchers, mostly from the control community, attempt to design controllers robust to the temporal non-determinism of wireless networks, for example, [
6,
18].
In contrast to all these papers, the focus of this work is on co-design of real-time control and wireless communications. Because of its interdisciplinary nature, this co-design is complicated, with limited results reported in the literature. Liu and Goldsmith [
19] introduced the methodology of cross-layer design into WCS design, and presented a four-layer framework. But adaptation of the sampling periods of control loops is not considered. Through studying the impact of varying fading wireless channels on control performance, Mostofi and Murray [
5] suggested that the controller parameters should be dynamically adapted with respect to channel conditions. An offline approach to optimize the stationary performance of a linear control system by jointly allocating communication resources and tuning parameters of the controller is presented in [
20]. Different methods for adapting sampling periods at runtime have been developed in e.g. [
10,
11,
21]. All these methods are based on algorithms with fixed parameters. Consequently, the effects of varying channel conditions such as changes in network transmission rates are not attacked. In our recent work [
3,
4,
9], we presented several design methods for control systems over wireless networks. An integrated framework that adjusts the maximum number of allowable data retransmission attempts and tunes the controller parameters is given in [
22]. Different approaches to dynamic bandwidth allocation through dynamically adjusting sampling periods are presented in [
23,
24] for wireline networked control systems. Additionally, almost all existing solutions for online sampling period adjustment are time triggered.
Considering WCSs closed over IEEE 802.11b WLAN, this paper develops a cross-layer adaptive feedback scheduling (CLAFS) scheme [
25] that dynamically adjusts the sampling periods with respect to variable channel conditions. The primary objective is to provide QoC guarantees for WCSs via flexible resource management in dynamic environments that feature noise interference and variability of the network transmission rate. Based on cross-layer design, this scheme takes advantage of sharing and exchanging of information across the physical layer and the application layer within the communication protocol stack of WLAN. The sampling periods of control loops are adapted online to control the deadline miss ratio (DMR). To cope with dynamic variations of the link capacity, the feedback scheduler uses a simple proportional control algorithm with adaptive parameters. Since interference and node movement in wireless systems are stochastic and unpredictable in most situations, it is usually hard to select an appropriate invocation interval for a time-triggered feedback scheduler. To address this problem, an event-driven invocation mechanism for the feedback scheduler is suggested. This mechanism contributes not only to reduction of overheads (on average), but also to quick responses to changes in communication resource availability, resulting in further improvement of practical performance of the feedback scheduler.
This paper is organized as follows. Section 2 describes the architecture of the control system considered. The case used as an illustrative example throughout the paper is also given. In Section 3, the employed cross-layer design methodology is described, followed by an analysis of the temporal properties of the studied WCS in terms of DMR. Then the CLAFS scheme is presented along with relevant algorithms. Section 4 presents the event-driven invocation mechanism for the feedback scheduler. In Section 5 the effectiveness of the proposed approach is validated by simulations highlighting its advantages. Finally, Section 6 concludes with discussions on possible extensions over the proposed approach.
2. System Model
Consider a WCS shown in
Fig. 1, where, besides an interfering loop, there are altogether
N independent control loops. Each control loop consists of a smart sensor (S), a smart actuator (A), a controller (C) and a physical process (P) to be controlled. To facilitate time synchronization, assume that the sensor and the actuator run on top of the same clock platform. The nodes communicate using the IEEE 802.11b protocol. The computation times of all control tasks on the controllers are assumed to be negligible relative to communication delays. The total delay within a control loop is consequently equal to the sum of the communication delay of sampled data from the sensor to the controller and the communication delay of control command from the controller to the actuator, including both waiting delays and transmission delays.
In the context of wireless control, there are basically two classes of deadline misses. The first class is that the sample data or the control command is truly lost during the course of transmission due to bit errors, noise interference, low received signal strengths, etc. In contrast, in the second class of deadline misses, the control command is actually received by the actuator, but the communication delay exceeds the deadline, which equals the sampling period.
2.1. Communication over WLAN
IEEE 802.11b protocol [
26] specifies two medium access coordination functions, the mandatory distributed coordination function (DCF) that is based on Carrier Sense Multiple Access with Collision Avoidance (CSMA/CA) and the optional point coordination function (PCF). Unlike wired nodes, wireless nodes cannot detect collisions because they are half-duplex, i.e. they cannot send and receive signals at the same time. CSMA/CA delivers a best effort service, thereby providing no bandwidth and delay guarantees.
In IEEE 802.11, each node senses the medium before starting a transmission. If the medium is idle for at least a DCF interframe space (DIFS), the packet is transmitted immediately. If the medium is sensed busy, the node waits for the end of the current transmission and then starts the contention, also called backoff process. The node selects a random backoff time. During the backoff process, the backoff timer is decremented in terms of slot time as long as the medium is idle. When the medium is busy, the timer is frozen. When its backoff timer expires, if the network is still idle, the data packet is sent out. The node having the shortest contention delay wins and transmits its packet. The other nodes just wait for the next contention. If another collision occurs, a new backoff time is chosen and the backoff procedure starts over again until some time limit is exceeded.
2.2. Case Study
There are three identical control loops in the WCS, i.e.
N = 3. Each of the processes under control is an independent DC motor [
27] modelled in continuous-time form:
The controllers use the PID (Proportional-Integral-Derivative) control law with a continuous-time form
. The controller parameters are: KP = 0.1701, KI = 0.378, and KD = 0. Digital controllers are designed by discretizing continuous-time controllers. As sampling periods are changed, the controller parameters of digital controllers are updated accordingly.
Due to node movement, the communication distance between the controller and the process (where the sensor and the actuator are attached) may change during runtime. According to the properties of wireless signal transmission, the received signal strengths drop with increasing communication distances. When the signal-to-noise ratio of the received signals is below a certain level, IEEE 802.11b will make the trade-off between speed and communication reliability by reducing the transmission rate, for example, from the usual maximum value of 11 to 5.5, 2, or even 1 Mb/s [
10]. This inherent feature of 802.11b gives rise to variability of channel capacity, a crucial issue that should be taken into account when designing control systems closed over WLAN.
Apart from the changes in channel capacity, another problem that needs to be addressed is the effect of noise interference on QoC. In the subsequent sections, a general solution for these problems will be proposed and validated, while using this case as an illustrative example.
3. Cross-Layer Adaptive Feedback Scheduling
To enable wireless control in dynamic environments, the feedback scheduling technology is adopted. It has been shown that feedback scheduling is quite promising in managing uncertainties in resource availability [
28,
29]. This motivates the use of this technology in dynamic management of the variable communication resources in WLAN. To cope with the adverse properties of wireless communications, the cross-layer design methodology, a technique that is gaining increasing importance in networking applications, is incorporated with feedback scheduling.
3.1. Cross-Layer Design Methodology
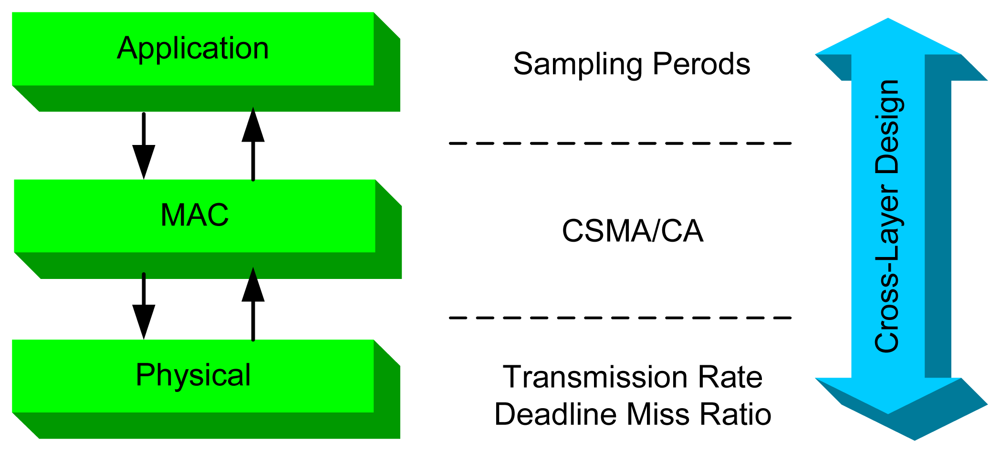
The design of wireless networks is often based on a layered network protocol stack, and the design and operation of different network layers are separated. As shown in
Fig. 2, IEEE 802.11b specifies two layers, i.e., the physical layer and the MAC sub-layer, among the seven-layer OSI reference model. At the physical layer 802.11b specifies four different levels of transmission rates, i.e., 1, 2, 5.5, and 11Mb/s. At the MAC layer 802.11b exploits CSMA/CA to solve resource contention among multiple nodes. In the context of wireless control, it is intuitive that the control applications are at the application layer.
When the system operates under dynamic environments, the timing properties of WLAN may vary with different physical layer parameters, which influence in turn the performance of the control systems at the application layer. To maximize QoC, it is necessary to take advantage of dynamic interactions between the physical layer and the application layer. Cross-layer design should be exploited to achieve application adaptation [
19,
30].
In this paper, the sampling periods of control loops are chosen as the parameters of the application layer. The main reason behind this choice is that the sampling periods influence not only the QoC but also the workload on the network, which affects the communication delay and the DMR. In a sense, the DMR can be regarded as an indicator for link quality associated with the physical layer. Since the transmission rate may change at runtime, it naturally becomes another parameter at the physical layer. Consequently, the basic role of feedback scheduling that exploits cross-layer design is to adjust the sampling periods of control systems at the application layer based on information about DMR and transmission rate from the physical layer.
In wireless networked systems, a straightforward design objective of feedback scheduling is to control the DMR at a desired level. Since WLAN does not support non-destructive communication protocols, it is impossible to analyse the system schedulability for WCSs. Therefore, the network utilization is not a suitable choice for the controlled variable for feedback scheduling. Without loss of generality, the DMR of all control loops is used as the controlled variable of the feedback scheduling system. Actually, because WLAN employs a MAC protocol featuring random medium access, the DMR of control loops also reflects the level of DMR of interfering signals.
3.2. Analysis of Deadline Misses over WLAN
Before designing the feedback scheduling algorithm, the temporal behaviour of WLAN in terms of DMR needs to be studied. In the following, the effects of the transmission rate r and the sampling period h on the DMR ρ are analysed through simulation experiments.
Assume that there is no interfering signal in the system shown in
Fig. 1, and the sizes of all data packets to be transmitted over the network are 1 KB.
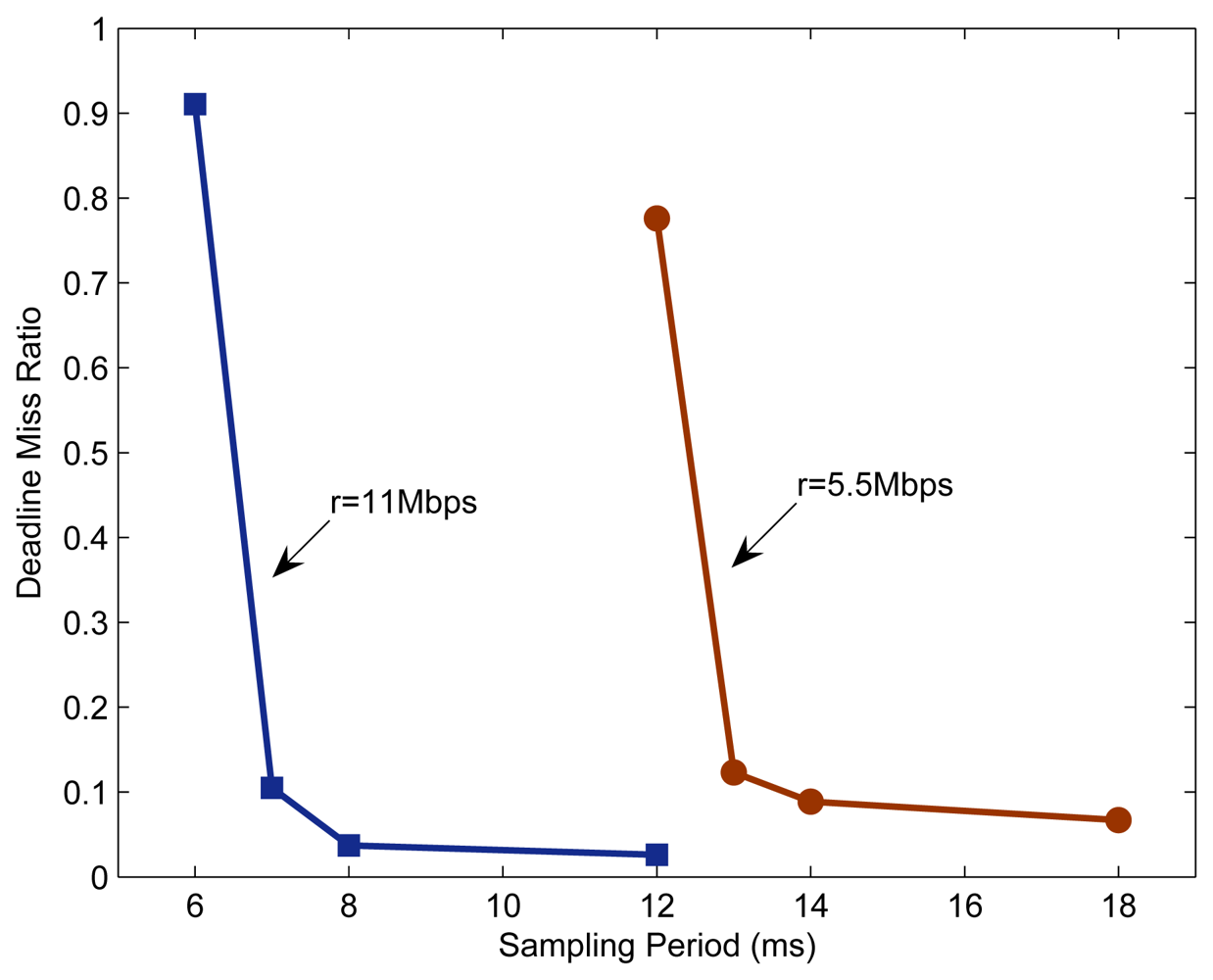
Fig. 3 depicts the DMR of the system with different transmission rates and different sampling periods. For each pair of transmission rate and sampling period, the simulation is run 10 times, each for 3 seconds. Each value given in
Fig. 3 is the arithmetical mean of the DMRs recorded separately in these 10 runs.
Since the three control loops in the system are completely identical, every change in sampling period shown in
Fig. 3 implies that the sampling periods of all three control loops are adjusted at the same time. With a given transmission rate, the DMR decreases as the sampling period increases, and the rate of the change also decrease gradually.
When the sampling period is relatively small, the network traffic is heavy, resulting in frequent collisions among communication nodes. As a result, the communication delay of a data packet may become large, even go beyond the deadline, or the data packet may be dropped due to too many retransmission attempts. In such situations, the DMR will be large. Enlarging the sampling period can reduce the DMR. The reasons behind can be explained as follows.
Firstly, the increase of sampling period reduces the amount of network traffic and hence the probability of node collisions. Consequently, the communication delay of data packets decreases on average, and the possibility of data packets being dropped also decreases thanks to the reduction in the number of retransmission attempts.
Secondly, as the sampling period increases, the deadlines of data packets to be transmitted increase accordingly. Consequently, longer communication delays are allowed. Both of these effects result in reduced DMRs.
Comparing the results for r = 5.5 Mbps and r = 11 Mbps, it can be seen that larger transmission rate benefits the reduction of DMR, especially when the communication resources are scarce. For instance, when h = 12 ms, the DMRs for r = 5.5 and 11 Mbps are ρ = 77.6% and 2.7%.
3.3. Adaptive Feedback Scheduling Algorithm
From the above analysis, the basic idea of feedback scheduling of WCSs can be stated as follows: with the goal of maximizing QoC, dynamically adjust the sampling periods of control loops to maintain the DMR at a desired level. From the control perspective, lower DMRs are always better. Therefore, large sampling periods should be used to avoid deadline misses.
However, it is not easy to completely avoid deadline misses in a typical wireless environment. As also shown in
Fig. 3, in order to reduce the DMR to a near-zero level, quite a large sampling period has to be assigned to each control loop. Unfortunately, according to sampled-data control theory, such a large increase in sampling period could degrade the QoC remarkably. In this context, the resulting QoC of the system may be adversely deteriorated, regardless of the decrease in the DMR. Therefore, in WCSs it is favourable to maintain the DMR at an appropriate non-zero level [
10,
21].
Within the framework of feedback scheduling, we use a simple proportional control algorithm to adjust the sampling period:
where
K is the proportional coefficient,
e(
j)=
ρ(
j)-
ρr is the difference between actual DMR and its desired value, and
j is the index of the invocation instant of the feedback scheduler. Taking into account the constraint on the maximum allowable sampling period
hmax of the control loops, the sampling period at
j-th instant is then calculated by:
In the above algorithm, the proportional coefficient K and the DMR setpoint ρr are two key design parameters. Related design considerations are described below.
3.3.1. Proportional Coefficient
As shown in
Fig. 3, when the DMR is at a high level (relative to the desired level), changes in the sampling period will affect the DMR significantly. The DMR could then be brought back to the desired level by only a small change in the sampling period. Accordingly, the value of
K should be set relatively small. Otherwise, when the DMR is at a low level, the effect of the change in sampling period on the DMR is less significant. To achieve the desired level of DMR more quickly, the value of
K should be set larger.
In this work, a simple yet illustrative algorithm given by (4) is used to adapt K.
where
K0 can be obtained from simulation experiments, Δ
ρ+ and Δ
ρ− are user-specified parameters. Generally
K0 inversely relates to the slope of the curve of DMR at the operation point, and consequently changes with the transmission rate
r and the DMR setpoint
ρr.
Besides the above equation, there are other advanced algorithms that could potentially be more efficient in adjusting K, for example, the gain scheduling method from adaptive control theory. However, these complex algorithms also add burdens to online computations associated with the feedback scheduler, thus causing larger overheads.
3.3.2. Deadline Miss Ratio Setpoint
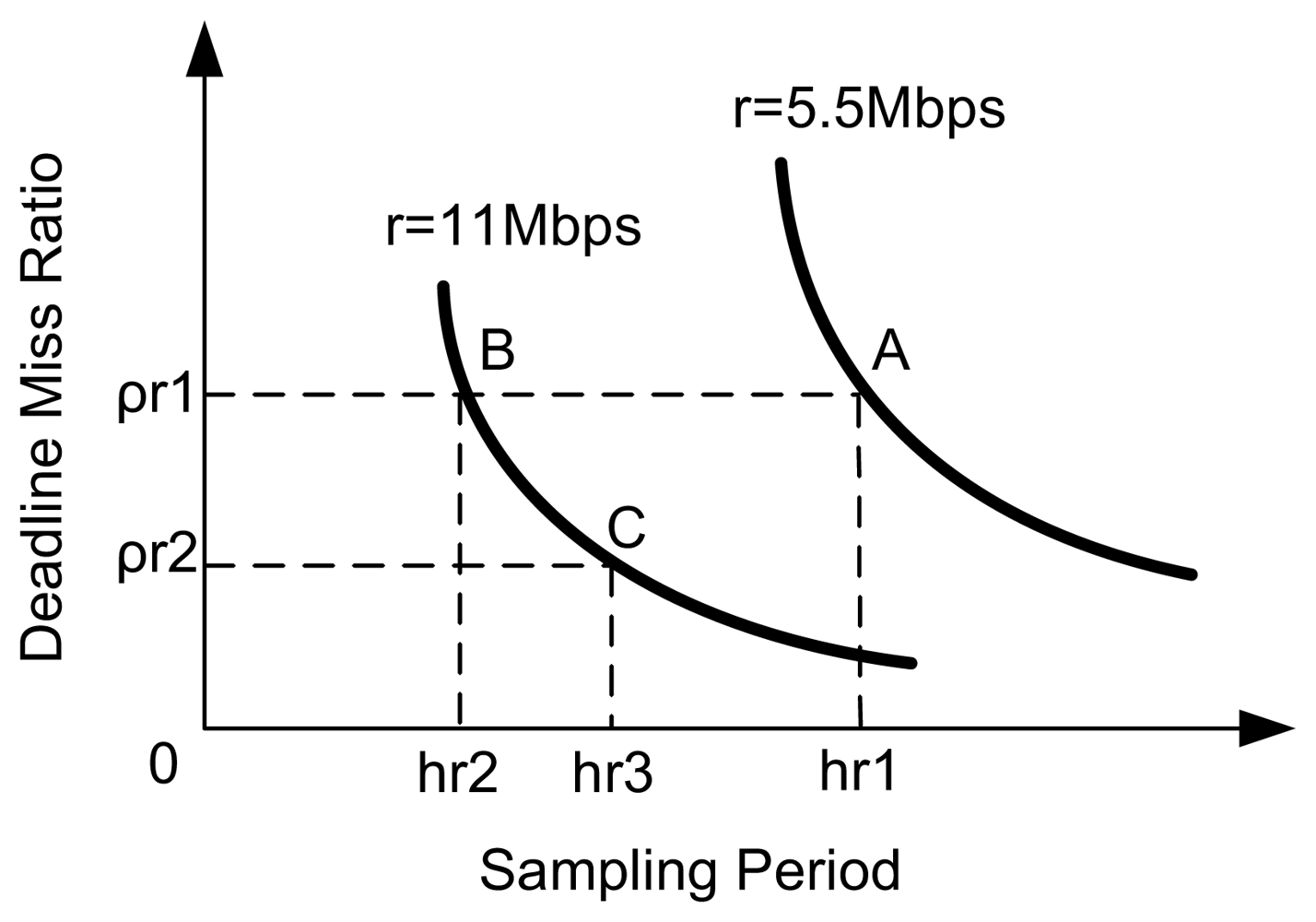
For a given control system, the effects of sampling period and DMR on QoC are deterministic, while the DMR is related to the sampling period. Therefore, for a given system setup, there exists an optimal operating point, say (hr, ρr), at which the system will in principle achieve the best QoC. Ideally, the best feedback scheduling performance could be achieved by setting the desired level of DMR to this optimal point. In practice, the relationships between the QoC, the DMR, and the sampling period are complicated, and therefore cannot be explicitly described. Most often a DMR setpoint close to the optimal one could be chosen through simulation and/or experimental studies.
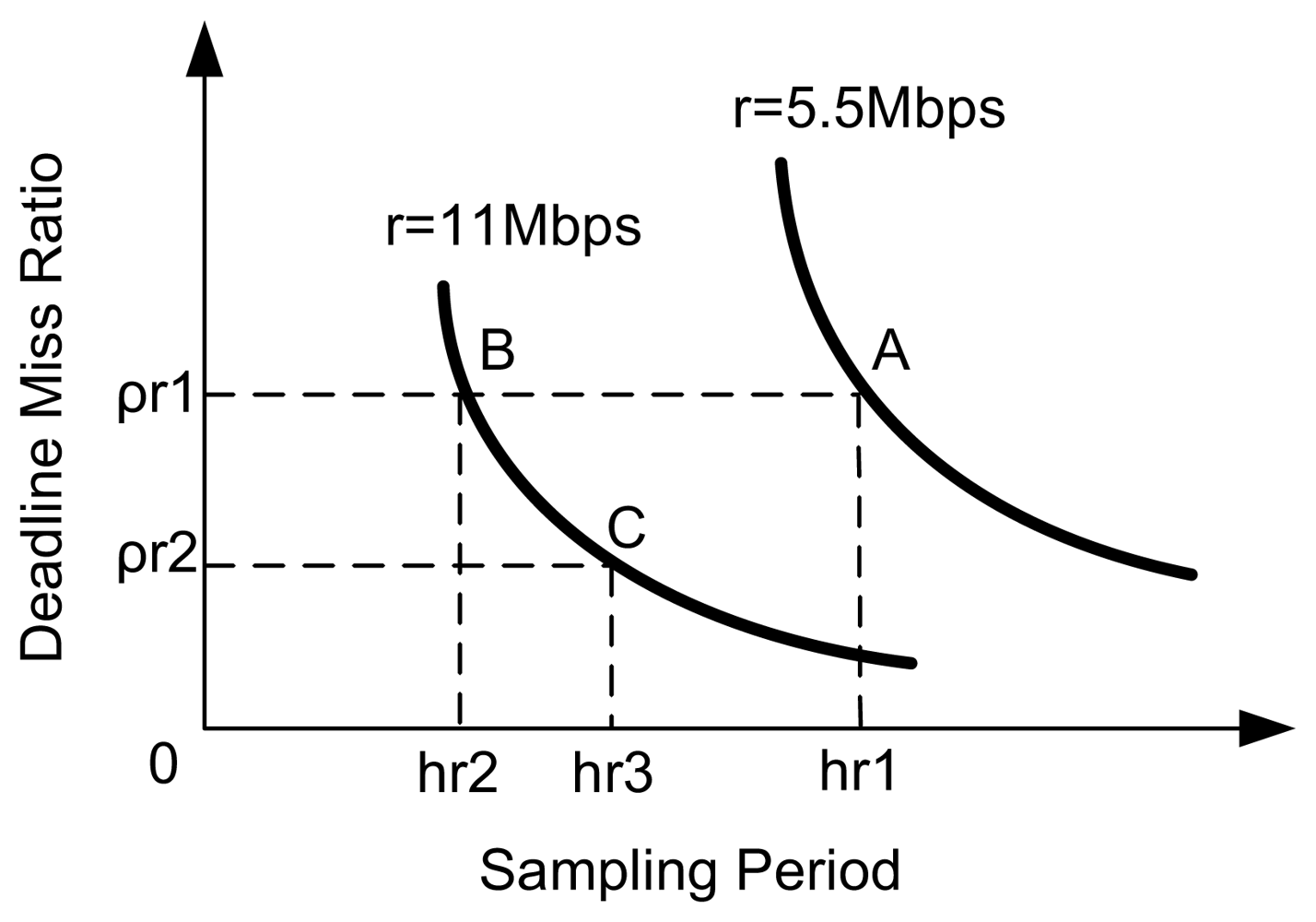
Suppose the point A(
hr1,
ρr1) in the schematic diagram
Fig. 4 is the setpoint for
r = 5.5 Mbps, which is (very close to) the optimal operating point. When the transmission rate changes, e.g., from 5.5 to 11 Mbps, the operating point of the system will become B(
hr2,
ρr1) if a fixed DMR setpoint is used. Clearly, the sampling period at point B decreases relative to A. Since trade-offs should be made between DMR and sampling period so as to achieve the best QoC, it is still possible to improve the QoC relative to the operating point B by properly increasing the sampling period, which reduces the DMR. Therefore, if A is the optimal operating point for
r = 5.5 Mbps, then the optimal sampling period for
r = 11 Mbps will be some value, say
hr3, that falls in the interval (
hr2,
hr1). This suggests that when the transmission rate increases, the QoC could be improved through decreasing the value of
ρr, for example, using
ρr2 as the new setpoint.
Based on this observation, we propose to adapt the DMR setpoint to different transmission rates. The setpoints used in this paper are simply set to:
Since only two cases, i.e.
r = 5.5 and 11 Mbps, are considered in our simulation experiments,
Equation (5) gives only the corresponding two values for
ρr. Since practical control systems are always designed capable of tolerating some level of DMRs, there is often a considerably large room for choosing the value of
ρr. Alternatively, compensation methods, e.g. [
4], for packet losses can be adopted in control loops to alleviate the negative effect of deadline misses on QoC.
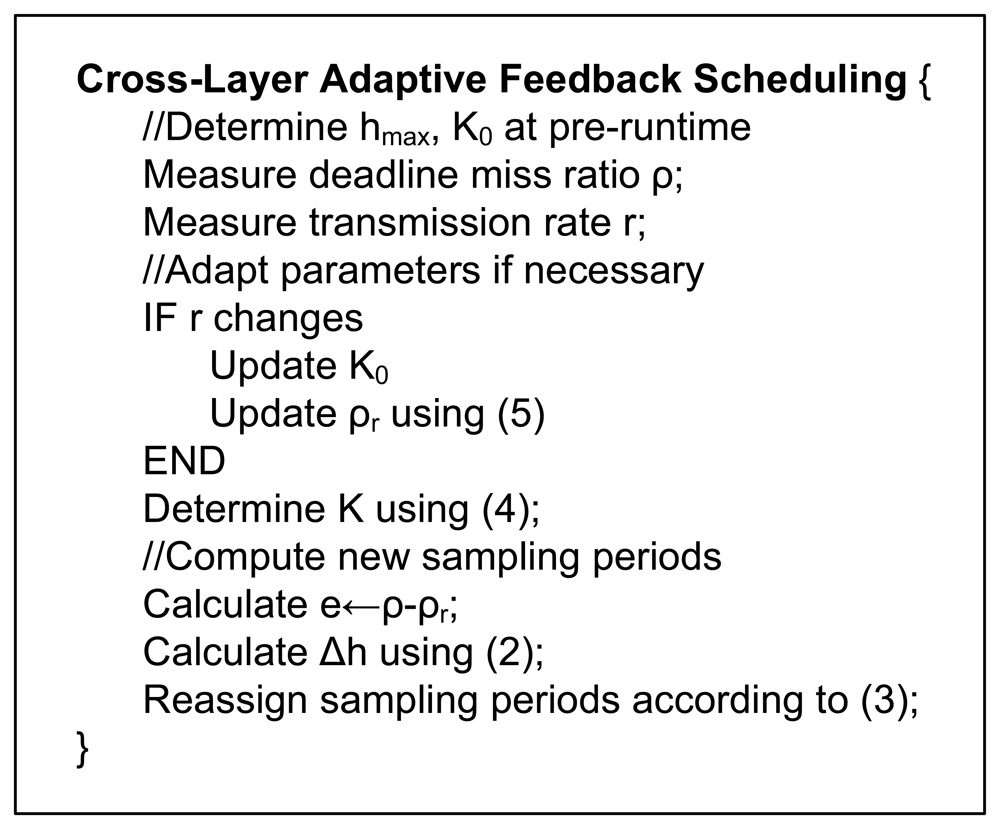
Fig. 5 gives the pseudo code for the above-described feedback scheduling algorithm. It can be seen that this algorithm exhibits online adaptability in two aspects: 1) the adaptation of the proportional coefficient
K to deal with the nonlinear relationship between the DMR and the sampling period; 2) the adaptation of the DMR setpoint to deal with the changes in the transmission rate.
4. Event-Triggered Invocation
Feedback schedulers are usually time triggered. An obvious advantage of this mode is that it makes it convenient to design and analyse the feedback schedulers using feedback control theory and techniques. In wireless environments where the environmental changes including noise interference and node movement are irregular and bursty, however, it could be very difficult to choose an appropriate invocation interval for time-triggered feedback schedulers.
On one hand, the invocation interval cannot be set too small because accurate DMRs would be impossible to obtain. Therefore, the feedback scheduler with a large invocation interval will not be capable of coping with, in a timely fashion, interference and node movement that occur between two consecutive invocation instants. On the other hand, when a relatively small invocation interval is used, it is possible that the system stays in steady state for quite a long time, when there is actually no need for sampling period adjustment. In this situation, time-triggered feedback schedulers could potentially waste resources in periodic execution of feedback scheduling algorithms and unnecessary update of system parameters.
To address this problem, an event-triggered invocation mechanism is proposed to improve the efficiency of feedback schedulers. Discussed below is how to implement this mechanism.
4.1. Design Methodology
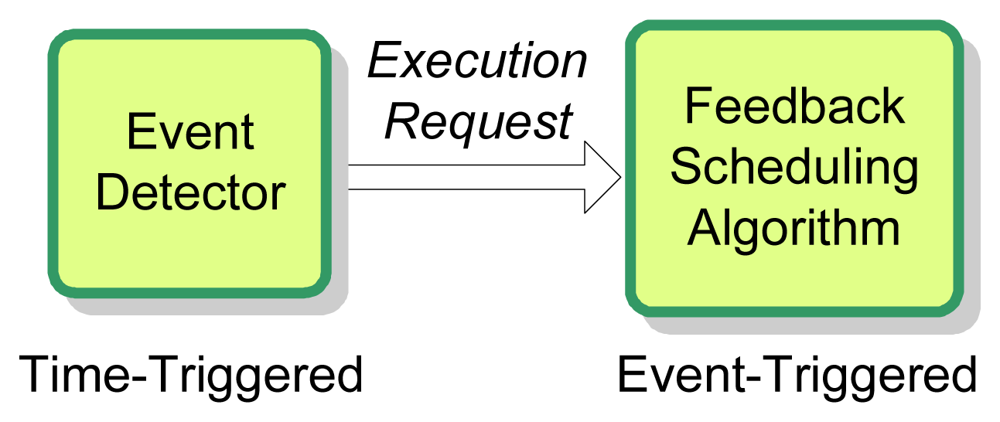
The schematic diagram of the event-triggered invocation mechanism is depicted in
Fig. 6. With a structure similar to event-based controllers [
31], there are basically two parts in this invocation mechanism [
28], the event detector and the feedback scheduling algorithm. The event detector is time-triggered with a period of
TED, while the feedback scheduling algorithm is triggered by the
execution-request event issued by the event detector.
The design of the event detector is a key issue for implementing the event-triggered invocation mechanism. The major role of the event detector is to decide under what conditions the system needs to execute the feedback scheduling algorithm. Intuitively, when the DMR is in or close to a steady state, there is no need to execute the feedback scheduling algorithm. If the DMR deviates significantly from the desired level, it becomes mandatory to run the feedback scheduler to adjust system parameters. In this paper the following condition is used for issuing the
execution-request event:
According to
(6), the feedback scheduling algorithm will be executed if and only if the absolute difference between the actual DMR and its desired level is no less than a specific threshold
δ. In this way, the disadvantages of the time-triggered invocation mechanism with respect to response speed and overhead are avoided. Furthermore, the negative effect of measurement noise on the DMR may be alleviated naturally.
There are two important parameters,
TED and
δ. Generally speaking, choosing these parameters demands careful trade-offs between quick response and low overhead. Thanks to the small amount of computations of
(6), it is possible to assign quite a small period
TED to the event detector to achieve quick response while keeping the feedback scheduling overhead small. The magnitude of the measurement noise should be taken into account when deciding the value of
δ. A
δ value that is slightly bigger than the magnitude of measurement noise could be used to reduce the times of execution of the feedback scheduler, which results in smaller overheads.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}