Range and Velocity Estimation of Moving Targets Using Multiple Stepped-frequency Pulse Trains

1
Department of Electronic Engineering, Tsinghua University, Beijing 100084, China
2
Department of Electrical and Computer Engineering, University of Delaware, Newark, DE 19716, USA
*
Author to whom correspondence should be addressed.
Sensors 2008, 8(2), 1343-1350; https://doi.org/10.3390/s8021343
Submission received: 2 February 2008
/
Accepted: 20 February 2008
/
Published: 22 February 2008
(This article belongs to the Special Issue Aerospace Sensor Systems)
{kind=link}
{kind=link}
{kind=link}
Abstract
:Range and velocity estimation of moving targets using conventional stepped-frequency pulse radar may suffer from the range-Doppler coupling and the phase wrapping. To overcome these problems, this paper presents a new radar waveform named multiple stepped-frequency pulse trains and proposes a new algorithm. It is shown that by using multiple stepped-frequency pulse trains and the robust phase unwrapping theorem (RPUT), both of the range-Doppler coupling and the phase wrapping can be robustly resolved, and accordingly, the range and the velocity of a moving target can be accurately estimated.
1. Introduction
Range and velocity estimation of moving targets using high range resolution radar is a topic of great interest. To achieve this goal, there are two problems to be considered. The first problem is how to obtain high range resolution. It is known that the range resolution is inversely proportional to the bandwidth of the transmitted signal and directly transmitting and receiving the ultra-wideband signal are difficult to be realized. Stepped-frequency pulse train processing is a well-known technique to obtain high range resolution without the requirement of wide instantaneous bandwidth [1-7], and it is adopted in this paper. The second problem is how to correctly measure the range and velocity of the moving target. When the target of interest is stationary, its position can be estimated by inverse discrete Fourier transform (IDFT) on the stepped-frequency pulse train [4-6]. However, when the target is moving, it is necessary to deal with the following difficulties. Firstly, the radial velocity of the target may cause range estimate shifted, which is called range-Doppler coupling [4-6], and both range position and radial velocity can not be correctly retrieved in the IDFT results. Secondly, for high speed target such as airplane or missile, the IDFT results only provide the remainders of the estimate of coupled range and velocity due to the 2π modulo folding of the IDFT, which is called phase wrapping. Thirdly, the remainders may be erroneous due to the possible interference, e.g., noise or clutter. Several effective methods have been proposed to resolve the range-Doppler coupling, such as by randomized stepped frequency modulation [6] or by elaborated design of the interpulse frequency coding [4-5]. However, how to robustly resolve the phase wrapping problem is not considered in these methods.
In this paper, we propose a new algorithm to robustly resolve both of the range-Doppler coupling and the phase wrapping. The radar transmits and receives multiple stepped-frequency pulse trains with different carrier frequencies, and IDFT is operated on every pulse train. It will be shown that, using the difference information among multiple IDFT results and the robust phase unwrapping theorem (RPUT) [8-9], both range and radial velocity of the moving target can be correctly estimated.
This paper is organized as follows. In Section 2, the range-Doppler coupling and the phase wrapping is reviewed in conventional stepped-frequency pulse train processing. In Section 3, the multiple stepped-frequency pulse trains are introduced and an algorithm is proposed to resolve both of the range-Doppler coupling and the phase wrapping. In Section 4, some numerical examples are given to demonstrate the proposed algorithm.
2. Single Stepped-Frequency Pulse Train Processing
In this section, we review the single stepped-frequency pulse train processing and introduce the range-Doppler coupling and the phase wrapping. Like most studies on stepped-frequency pulse train processing, we take the following assumptions: 1) the target moves with constant velocity v relative to the radar during the observation duration; 2) in each pulse the radar transmits the narrowband chirp signal and the pulse bandwidth is Δf; 3) the pulse train to be processed consists of the pulses stepped in frequency with a fixed frequency step and the step is equal to Δf; 4) the observation duration is short so that the target range migration does not exceed the range resolution cell of each pulse (denoted by ΔR and determined by ΔR=c/(2Δf)), which is reasonable for most moving targets since Δf is small according to 2).
The received baseband echo can be expressed as
where rect(·) is the rectangular function, Tp is the pulse width, γ is the chirp rate, fc is the base carrier frequency, n is the pulse index number, n=1, 2, …N, N is the total number of pulses, μ is the fast-time (or range-time), c is the speed of light, R(n) = R0 − vTn, R0 is the initial range position of the target, and T is the pulse repetition interval. The goal of this paper is to estimate R0 and v.
After the range compression in every pulse, (1) becomes
where δ(·) is the Delta-Dirac function, M is range cell index number where the target is detected in each pulse, r = R0 − (M−1)ΔR and 0 ≤r < ΔR. Since M has been determined in each pulse, we only need to estimate r and v from (2). Multiplying exp(j4πfc MΔR/c) to (2), we have
When the target is stationary, i.e., v=0, one can directly estimate r by IDFT in terms of n on (3) and finding the peak position. However, when the target is moving, i.e., v≠0, in IDFT results the peak appears at the position α′ = mod(α,1), where mod(·) is the modulus operation and
We first consider the case that v is small so that 0 ≤ α′ = α < 1. It is clear in (4) that r and v cannot be respectively retrieved by using the knowledge of α. This problem is called range-Doppler coupling. It is also noted that the last exponential term on the right-hand side of (3) causes the power spread in IDFT results but it does not affect the peak position α′, so we ignore this term in what follows. On the other hand, when v is large so that α = α′ + K for an unknown integer K, the value of α can not be uniquely determined from IDFT results. This problem is called phase wrapping. Moreover, the estimate of α′ may be erroneous due to the existence of noise and clutter. Several effective methods have been proposed to resolve the range-Doppler coupling [4-6]; however, the robust phase unwrapping is not considered in these methods. In next section we propose a new algorithm to resolve both of the range-Doppler coupling and the phase wrapping.
3. Multiple Stepped-Frequency Pulse Trains Processing
In this section, we present a new waveform named multiple stepped-frequency pulse trains and describe how to resolve both range-Doppler coupling and phase wrapping using this waveform.
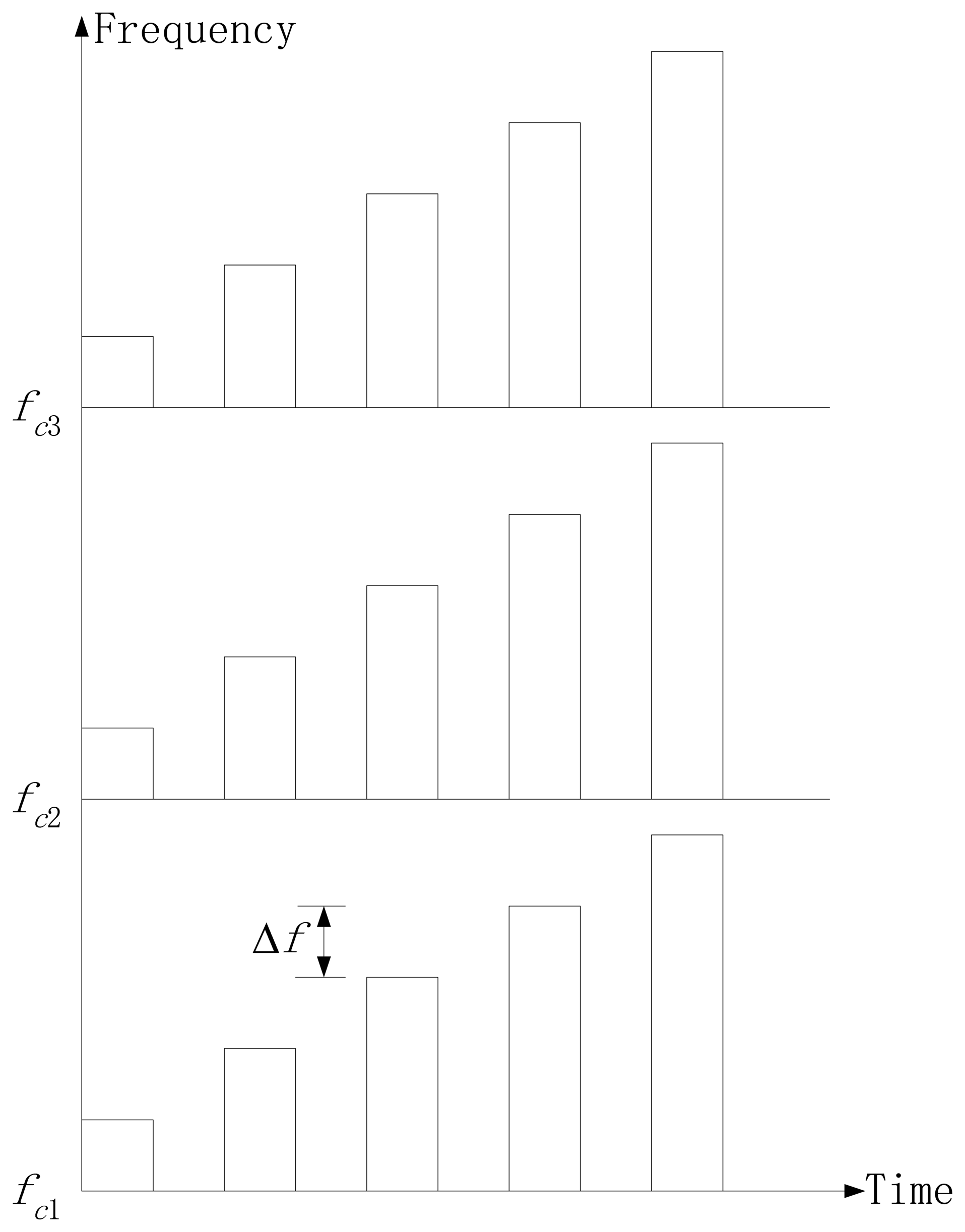
We replace the single stepped-frequency pulse train by multiple stepped-frequency pulse trains. This new waveform is shown in Figure 1, where three (or multiple) stepped-frequency pulse trains with different base carrier frequencies are simultaneously used. This can be realized by the following way: three antennas are fixed in the radar platform, and the same stepped-frequency pulse train is modulated on different carrier frequencies fc1, fc2 and fc3 and transmitted by three antennas, respectively, and then the different echoes onfc1, fc2 and fc3 are collected and demodulated by three antennas, respectively. Without loss of generality, we assume fc1 < fc2 < fc3 and (fc2 − fc1) and (fc3 − fc1) are two distinct positive real numbers and not integer multiple of each other.
Now we perform the processing described in the previous section on three stepped-frequency pulse trains. By performing P-point IDFT in terms of n in (3), we have
where integers pi are the peak position estimates in the P-point IDFT results on fci, 0 ≤ pi< P, εi are estimation errors, and Ki are unknown integers, i =1, 2, 3. When P is larger than the pulse number N, the sequence x(n) in (3) should be zero-padded before the IDFT. Assume that the errors εi are bounded by
where 0 ≤ τ < M is the maximal error level in estimation of the remainderspi. At the right hand side of (6), the first term is the quantization error and the second term is caused by possible interference, e.g., noise or clutter. Herein we are interested in the estimation of r and v from (5).
We first estimate v. Subtracting the first equation from the other two equations in (5), respectively, we have
where
and
. The problem is to estimate v using the reminders β1 and β2. In (7), while ξi cause small errors and they are difficult to be eliminated, the wrong Li may cause large folding errors. Thus, to estimate v, it is necessary to correctly determine Li, which follows the robust phase unwrapping problem studied in [8-9] and is what we focus on in the following. Since 0 ≤ pi < P,
and
. If β1 < 0, the first equation of (7) can be rewritten as
so that
. This is not essential for estimating v because determining L1 is replaced by determining (L1 -1). Thus, without loss of generality, we assume
,
. Let Γ be the smallest positive real number such that Γ1 ≜ Γ/(fc2 − fc1) and Γ2=Γ/(fc3 − fc1) are integers and they are coprime. This holds because (fc2−fc1) and (fc3 − fc1) are not integer multiples of each other, and Γ can be known since all fci are known. Multiplying Γ1 and Γ2 to the two equations in (7), respectively, yields
According to the RPUT obtained in [8], if
where the presence of factor 1/2 is due to two possible motion directions for the target, i.e., toward the radar and away from the radar, and
then L1 and L2 can be correctly determined as
About the detailed proof of (12), we would like to refer the readers to [8]. Then v can be estimated by
and the estimation error can be upper bounded by
Submitting (13) into (5) and using
, r can be estimated by
and the target range position can be accordingly estimated by Rˆ0= (M − 1)ΔR + rˆ. The estimation error of r can be upper bounded by
To sufficiently utilize the information of the N pulses, it is better to let P ≥ N, and accordingly, (11) may be rewritten as
4. Numerical Examples
In this section, some numerical examples are given to show the effectiveness of the proposed algorithm. Assume that the observation range is about 20km, the pulse repetition interval T=0.625ms, the pulse number N=64, the frequency step (it is equal to the pulse bandwidth) Δ f=5MHz, the base carrier frequencies fc1, fc2 and fc3 are 7GHz, 9GHz and 10GHz, respectively, a target is moving toward the radar with speed 100m/s, and the initial distance between the radar and the target is R0=19885m. In each pulse, the low range resolution is c/(2Δ f)=30m, so after the range compression in every pulse, the target can be detected at 663th low range resolution cell, i.e., M=663, and r=R0− (M−1)ΔR =25m. Substituting above parameters into (4) yields | α | >1, which implies that the phase wrapping problem occurs.
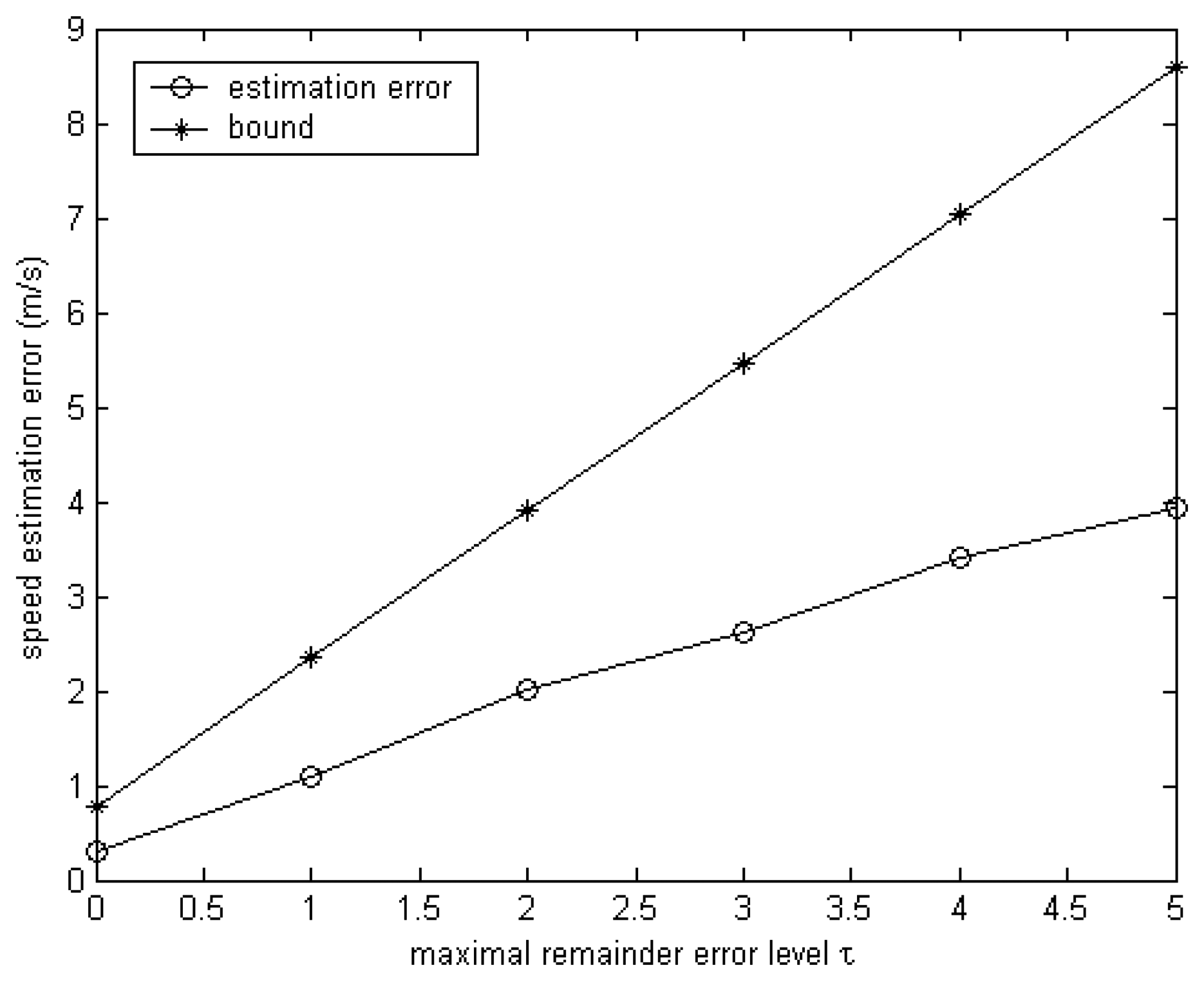
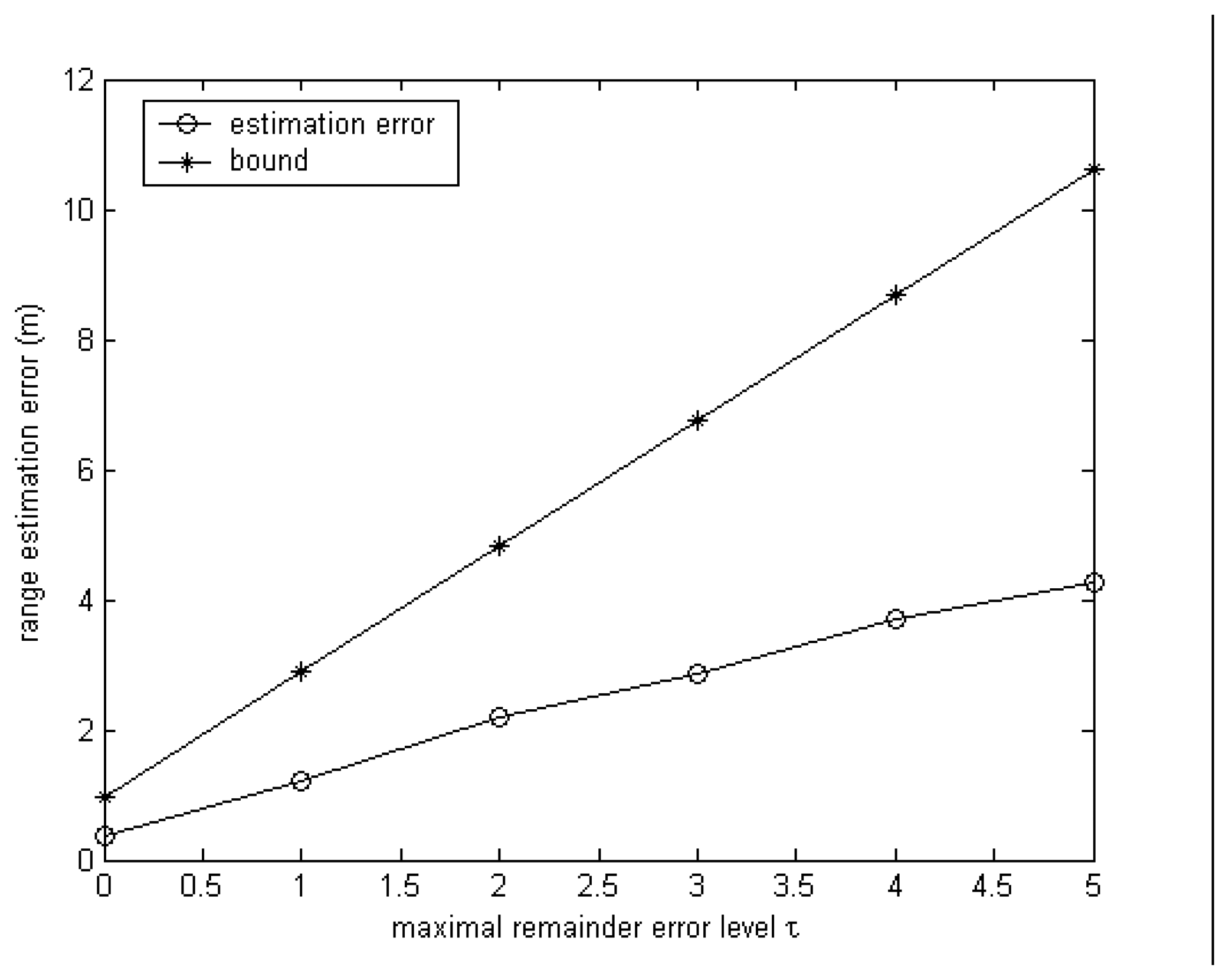
According to the derivation in the previous section, one can calculate that Γ = 6x109, Γ1 =3 and Γ2 =2. The maximal determinable speed is | vmax | =120m/s according to (10). We consider the maximal remainder error levels τ =0, 1, 2, 3, 4, 5 and let P=128 that satisfies (11). In Fig. 2, the error between the estimate vˆ in (13) and the true value of v and the error upper bound in (14) versus various τ are plotted, and they are marked by « and *, respectively. In Fig. 3, the error between the estimate rˆ in (15) and the true value of r and the error upper bound in (16) versus various τ are plotted, and they are marked by « and *, respectively. In Fig. 2 and Fig. 3, τ =0 means high SCNR (signal-to-clutter-noise ratio) case while the larger τ means low SCNR case, and the results are obtained by 100 trials. One can see the proposed algorithm robustly provides small estimation errors, even when the remainders are erroneous.
5. Conclusion
In this paper, a new radar waveform is designed and a new algorithm is proposed to estimate the range and velocity of a moving target. In order to resolve both range-Doppler coupling and phase unwrapping, three (or multiple) stepped–frequency pulse trains and the RPUT are used. Theoretical analysis and the simulation results show that the proposed algorithm can accurately estimate the range and the velocity of the moving target. As a remark, the proposed algorithm relies on the detectability of the moving targets. About the moving target detection using stepped-frequency pulse train, we would like to refer the readers to [7] and the corresponding topic will also be under our future investigation.
Acknowledgments
This work was supported by the Chuanxin Foundation from the Department of Electronic Engineering, Tsinghua University. Xia's work was partially supported by the Air Force Office of Scientific Research (AFOSR) under Grant No. FA 9550-05-1-0161 and a DEPSCoR Grant W911NF-07-1-0422 through ARO.
References and Notes
- Rihaczek, W. Principles of high resolution radar; McCraw-Hill, 1969. [Google Scholar]
- Farnet, E. C.; Stevens, G. H. Pulse compression radar. Skolnik, M. I., Ed.; In Radar handbook, 2nd; McCraw-Hill, 1990. [Google Scholar]
- Brenner, A. R.; Ender, J. H. G. Demonstration of advanced reconnaissance techniques with the airborne SAR/GMTI sensor PAMIR. IEE Proceedings – Radar, Sonar & Navigation 2006, 153(2), 152–162. [Google Scholar]
- Levanon, N. Stepped-frequency pulse-train radar signal. IEE Proceedings – Radar, Sonar & Navigation 2002, 149(6), 297–309. [Google Scholar]
- Chen, H.-Y.; Liu, Y.-X.; Jiang, W.-D.; Guo, G.-R. A new approach for synthesizing the range profile of moving targets via stepped-frequency waveforms. IEEE Geoscience and Remote Sensing Letters 2006, 3(3), 406–409. [Google Scholar]
- Axelsson, S. R. J. Analysis of random step frequency radar and comparison with experiments. IEEE Transactions on Geoscience and Remote Sensing 2007, 45(4), 890–904. [Google Scholar]
- Zhang, Q.; Yeo, T. S. ISAR imaging in strong ground clutter using a new stepped-frequency signal format. IEEE Transactions on Geoscience and Remote Sensing 2003, 41(5), 948–952. [Google Scholar]
- Xia, X.-G.; Wang, G. Phase unwrapping and a robust Chinese remainder theorem. IEEE Signal Processing Letters 2007, 14(4), 247–250. [Google Scholar]
- Li, G.; Xu, J.; Peng, Y.-N.; Xia, X.-G. An efficient implementation of a robust phase-unwrapping algorithm. IEEE Signal Processing Letters 2007, 14(6), 393–396. [Google Scholar]
Figure 1.
Multiple stepped-frequency pulse trains with different base carrier frequencies.
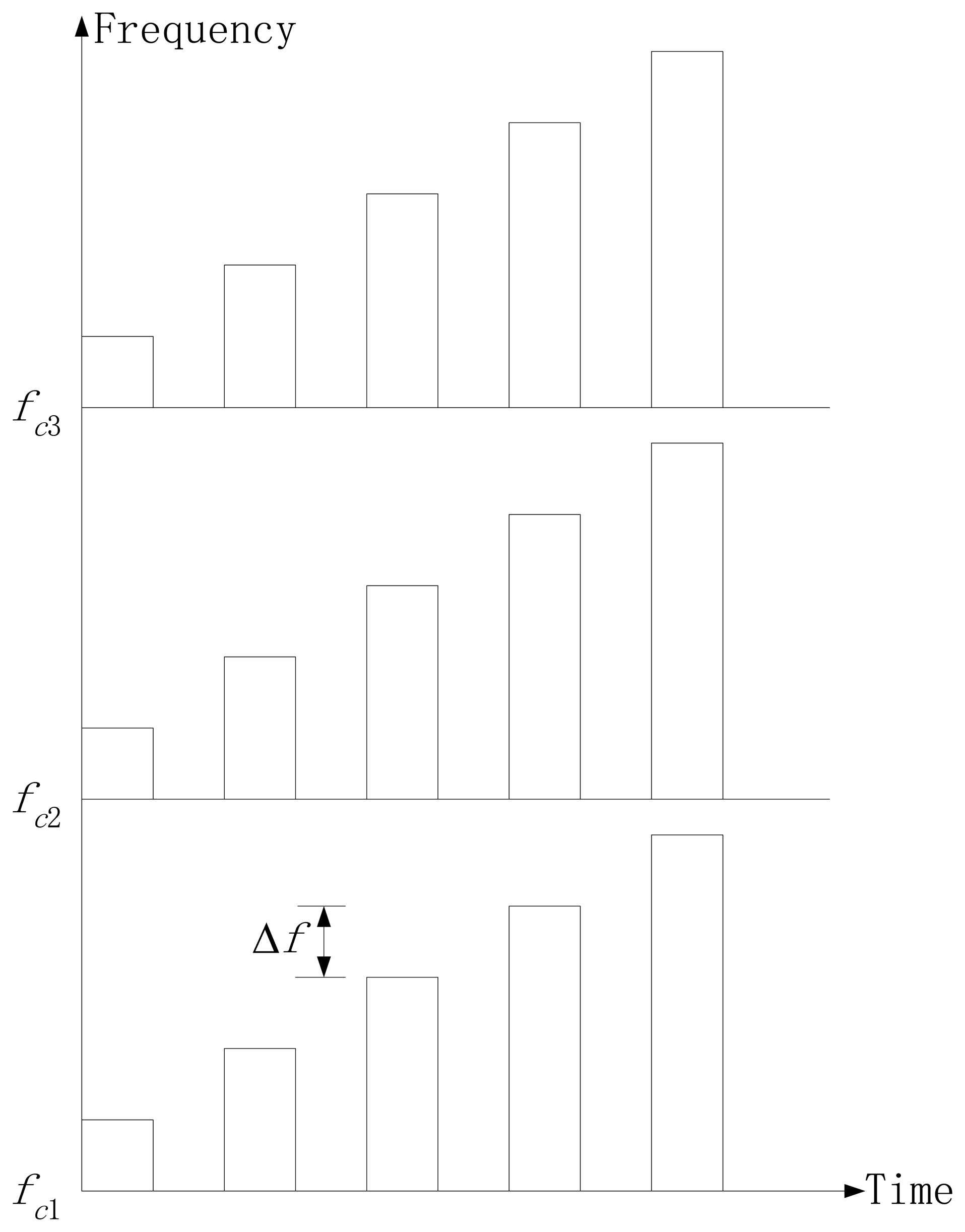
Figure 2.
The estimation error of speed v versus various maximal remainder error level τ

Figure 3.
The estimation error of range r versus various maximal remainder error level τ
© 2008 by MDPI Reproduction is permitted for noncommercial purposes.
Share and Cite
MDPI and ACS Style
Li, G.; Meng, H.; Xia, X.-G.; Peng, Y.-N. Range and Velocity Estimation of Moving Targets Using Multiple Stepped-frequency Pulse Trains. Sensors 2008, 8, 1343-1350. https://doi.org/10.3390/s8021343
AMA Style
Li G, Meng H, Xia X-G, Peng Y-N. Range and Velocity Estimation of Moving Targets Using Multiple Stepped-frequency Pulse Trains. Sensors. 2008; 8(2):1343-1350. https://doi.org/10.3390/s8021343
Chicago/Turabian StyleLi, Gang, Huadong Meng, Xiang-Gen Xia, and Ying-Ning Peng. 2008. "Range and Velocity Estimation of Moving Targets Using Multiple Stepped-frequency Pulse Trains" Sensors 8, no. 2: 1343-1350. https://doi.org/10.3390/s8021343