Development of a Fully Automated, GPS Based Monitoring System for Disaster Prevention and Emergency Preparedness: PPMS+RT

Abstract
:1. Introduction
2. Using GPS for Deformation Monitoring in Harsh Environments
- a)
- Line of sight is not required between stations;
- b)
- Updates can be provided at frequencies of 1 Hz and higher;
- c)
- 3 dimensional position information is provided; and
- d)
- Millimetre level position information is possible for baselines potentially up to 10 km in length.
- a)
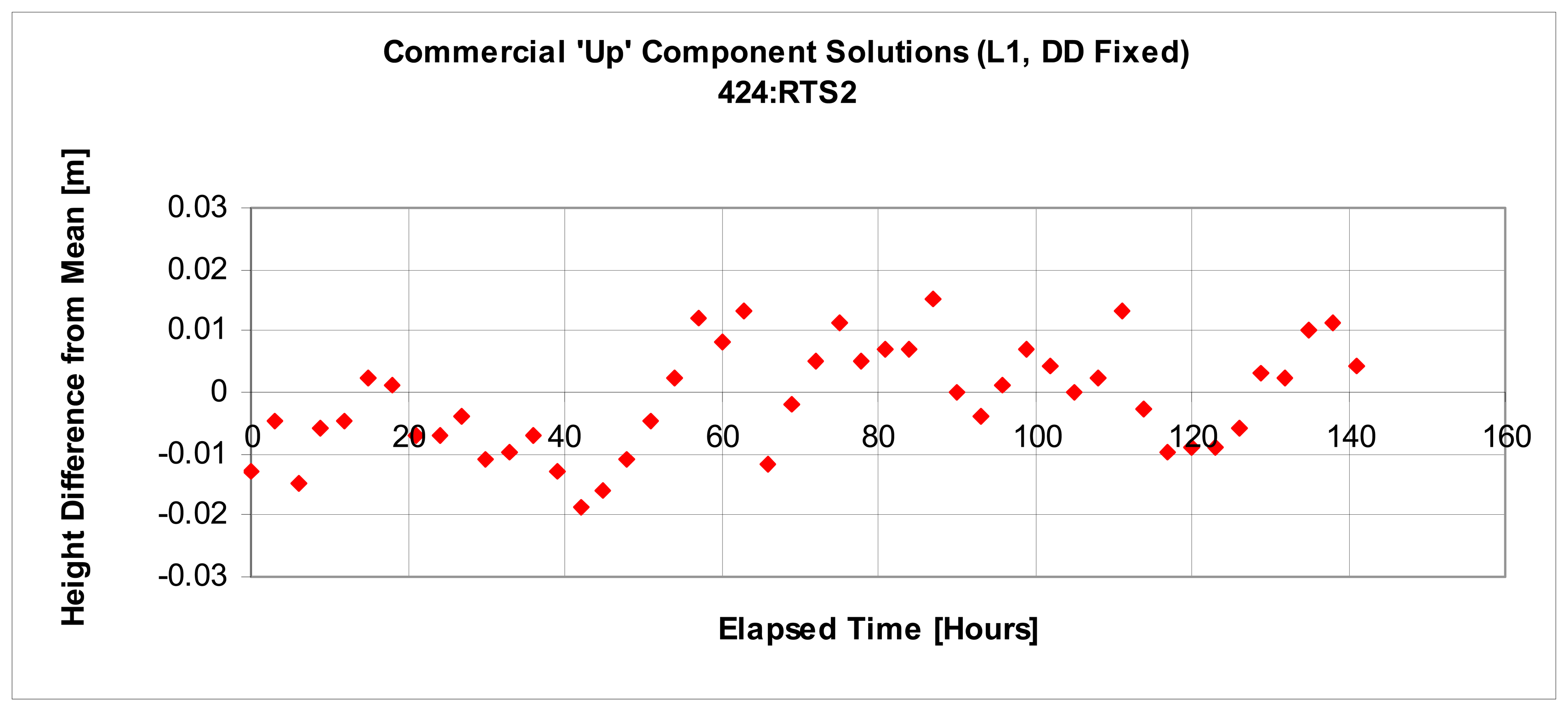
- Mitigating residual troposheric delay biases: Residual tropospheric delay is the portion of tropospheric delay that remains after modeling. Due to large height differences between master and rover stations, residual tropospheric delay biases can contaminate the vertical component of GPS baseline solutions. Beutler et al. [4] have illustrated that neglecting the differential troposphere causes a 3-5 mm relative height error for every millimetre of difference in zenith delay between stations. Estimating residual tropospheric delay bias terms is the usual approach to improving accuracy in such situations. The strength of the bias estimates, however, depends upon low elevation satellites which are generally not visible [5]. In order to meet sub-centimetre accuracy requirements in large open pit mines using GPS, a new methodology is required to mitigate this bias.
- b)
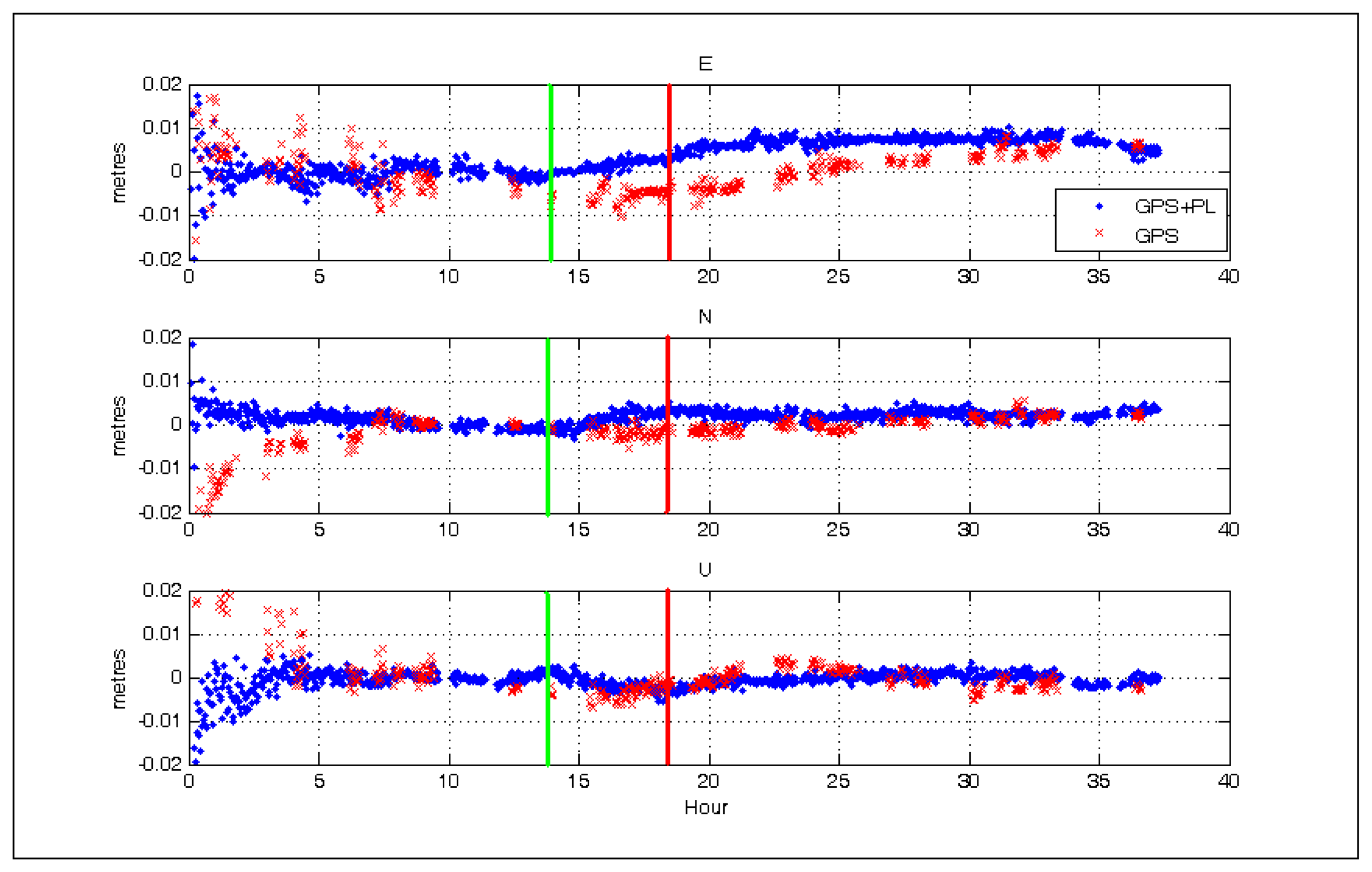
- Providing continuous updates with limited satellite visibility: The steep pit walls of open pit mines obstruct satellite visibility. This limits the reliability of the solutions as well as the frequency at which updates can be provided. In order to meet sub-centimetre accuracy requirements with sufficient update frequency, new technologies must be integrated with GPS.
- c)
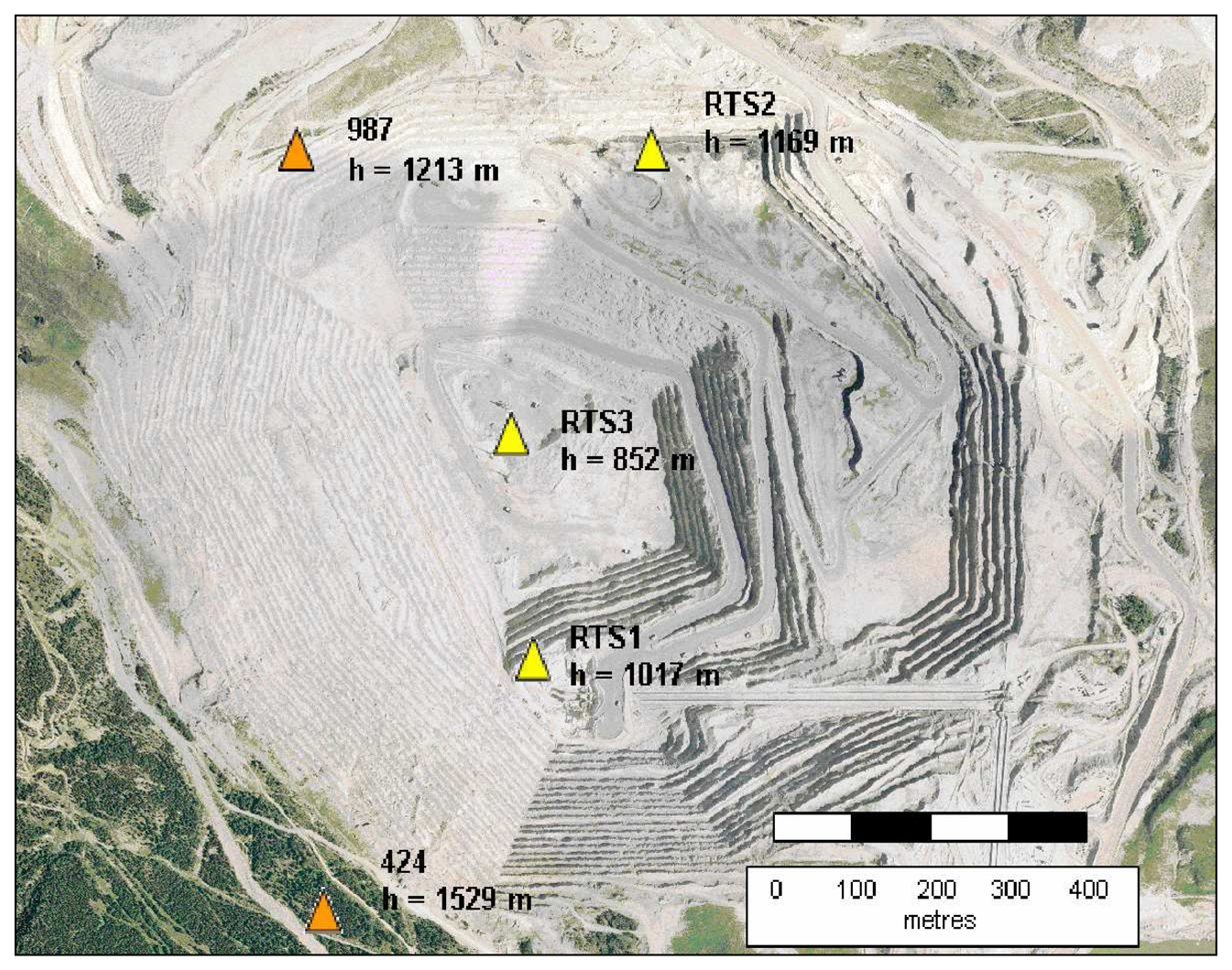
- Connecting to stable reference points: As precise as the GPS software may be, the overall accuracy of the solution depends upon the validity of the assumption that each reference point is stable. Tremendous care must be taken in choosing suitable reference station locations. Additional sources of information regarding the properties of the rock mass must be utilized to make informed decisions.
- d)
- Developing a fully automated GPS processor: A fully automated GPS processor is required to provide continuous updates in real-time. Ideally, the results from the processor can be used to provide ‘on-time’ warnings of impending danger. The processor must be designed to be robust so that false alarms do not occur. Additionally, the precision of the solutions must satisfy sub-centimetre displacement detection requirements with 95% confidence. Communication links must also be built into the software to allow for data transfer between GPS receivers located on site at target points and a central processing computer.
3. Overcoming GPS Deformation Monitoring Challenges
3.1. Mitigating Residual Tropospheric Delay
| SD operator between satellites i and j | |
| SD operator between receivers A and B | |
| δ | differentiator between times t1 and t2 |
| φ | carrier-phase observable (cycles) |
| N | ambiguity (cycles) |
| M | multipath (cycles) |
| I | ionospheric delay of the L1 carrier phase (m) |
| T | tropospheric delay (m) |
| f | carrier wave frequency (Hz) |
| c | speed of light in a vacuum (m/s) |
| εtrop | residual tropospheric delay bias (present over large height differences) (cycles) |
| eφ | random carrier-phase measurement noise |
- eδΔ∇φ random noise error of a TD carrier-phase observation
3.2. Improving Continuity in Solution Updates
- a)
- the user no longer needs to solve for the ambiguity term, which allows the system to be less susceptible to biases caused by cycle slips;
- b)
- for observation intervals less than a few seconds, the correlation between PL tropospheric delay parameters at times t1 and t2 will be large and biases originating from them will be significantly reduced;
- c)
- for observation intervals less than a few seconds, the correlation between low frequency multipath terms at times t1 and t2 will be large and biases originating from them will be significantly reduced. The high frequency component still remains;
- d)
- since the PL is stationary between times t1 to t2 and it is assumed that the receivers are stationary, the geometric distance terms involving the PL cancel so that the computed, geometric, TD is solely dependent upon the change in the geometry of the reference satellite. Consequently, the accuracy to which the PL coordinates must be known is very forgiving. Approximate coordinates are necessary simply for computing elevation angles to PLs if an elevation cut off constraint is imposed.
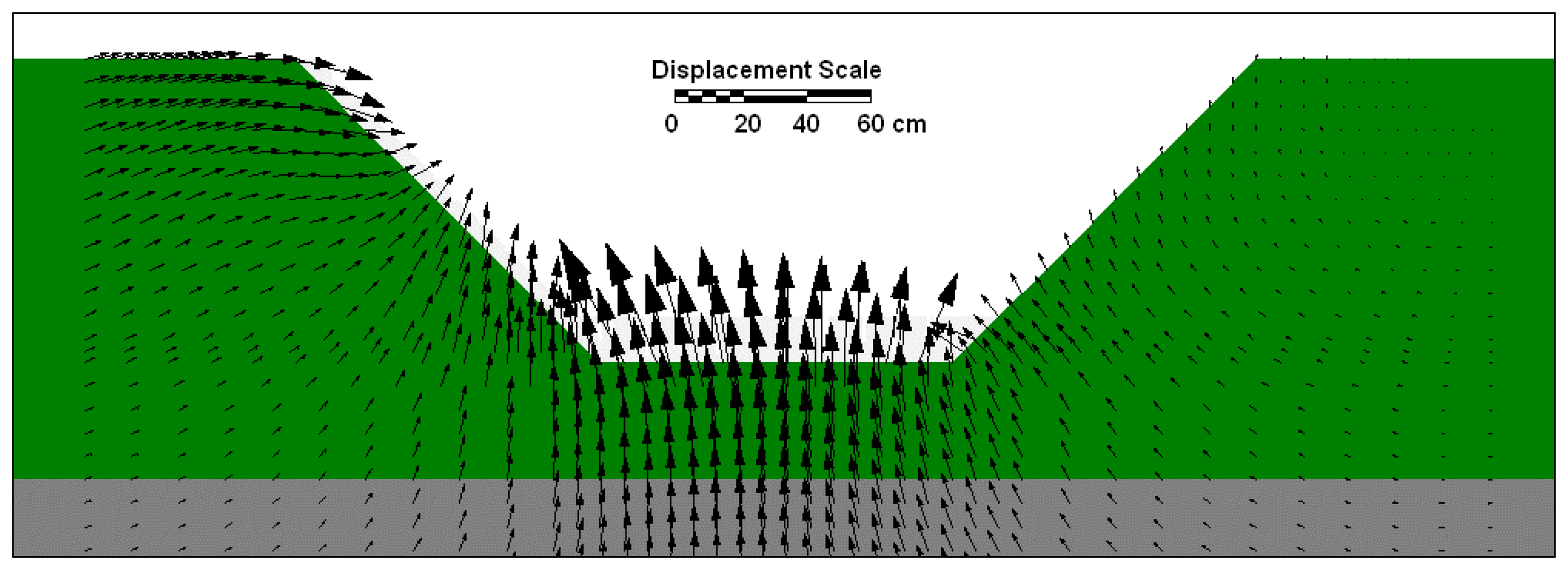
3.3. Predicting Station Behaviour using Deterministic Modelling
3.4. Developing a Fully Automated, GPS Monitoring System
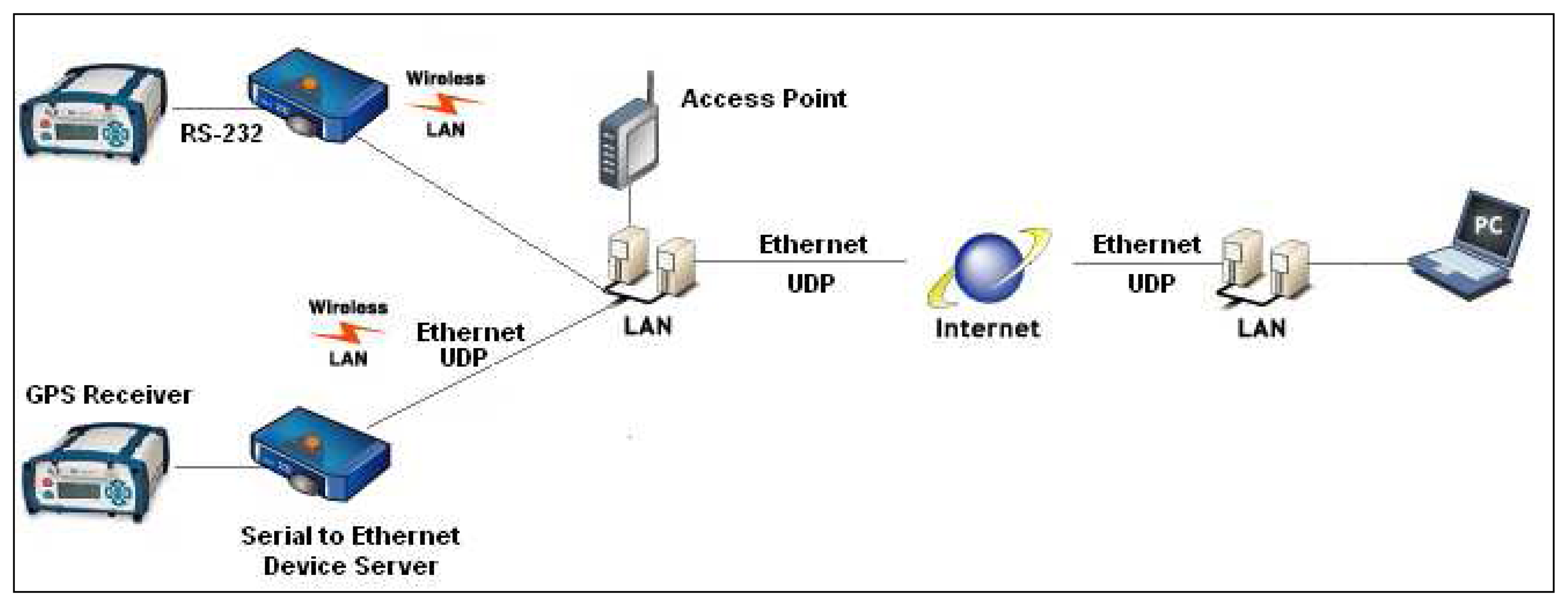
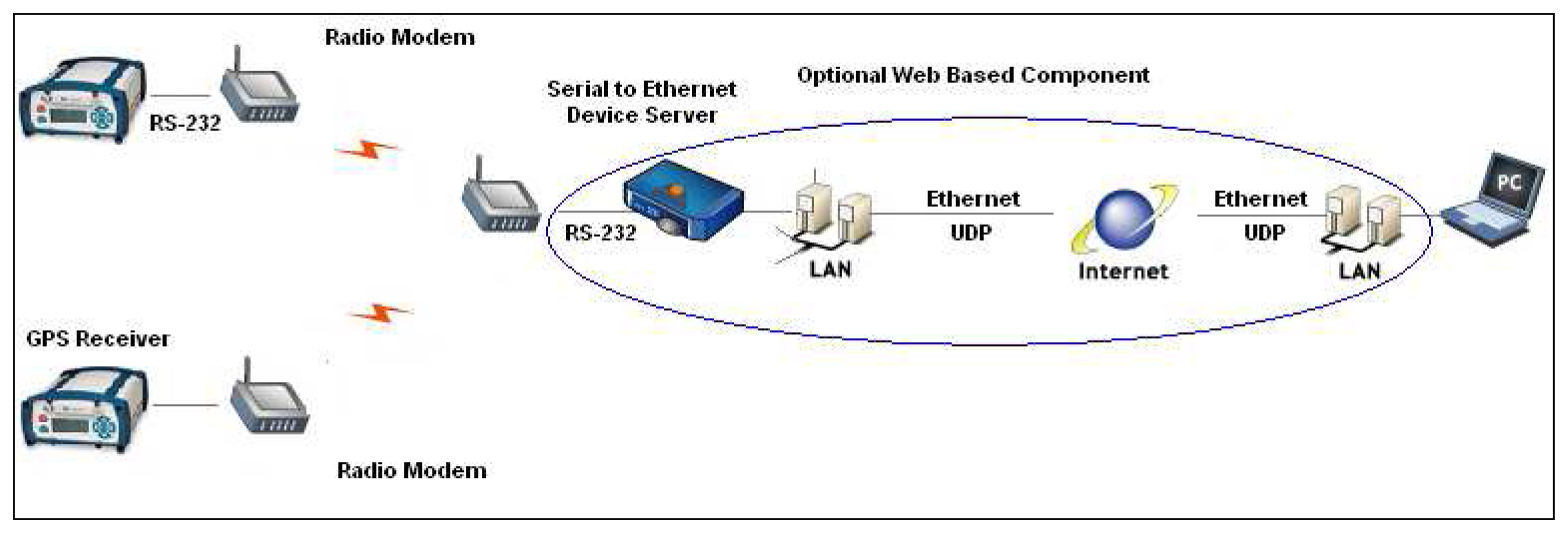
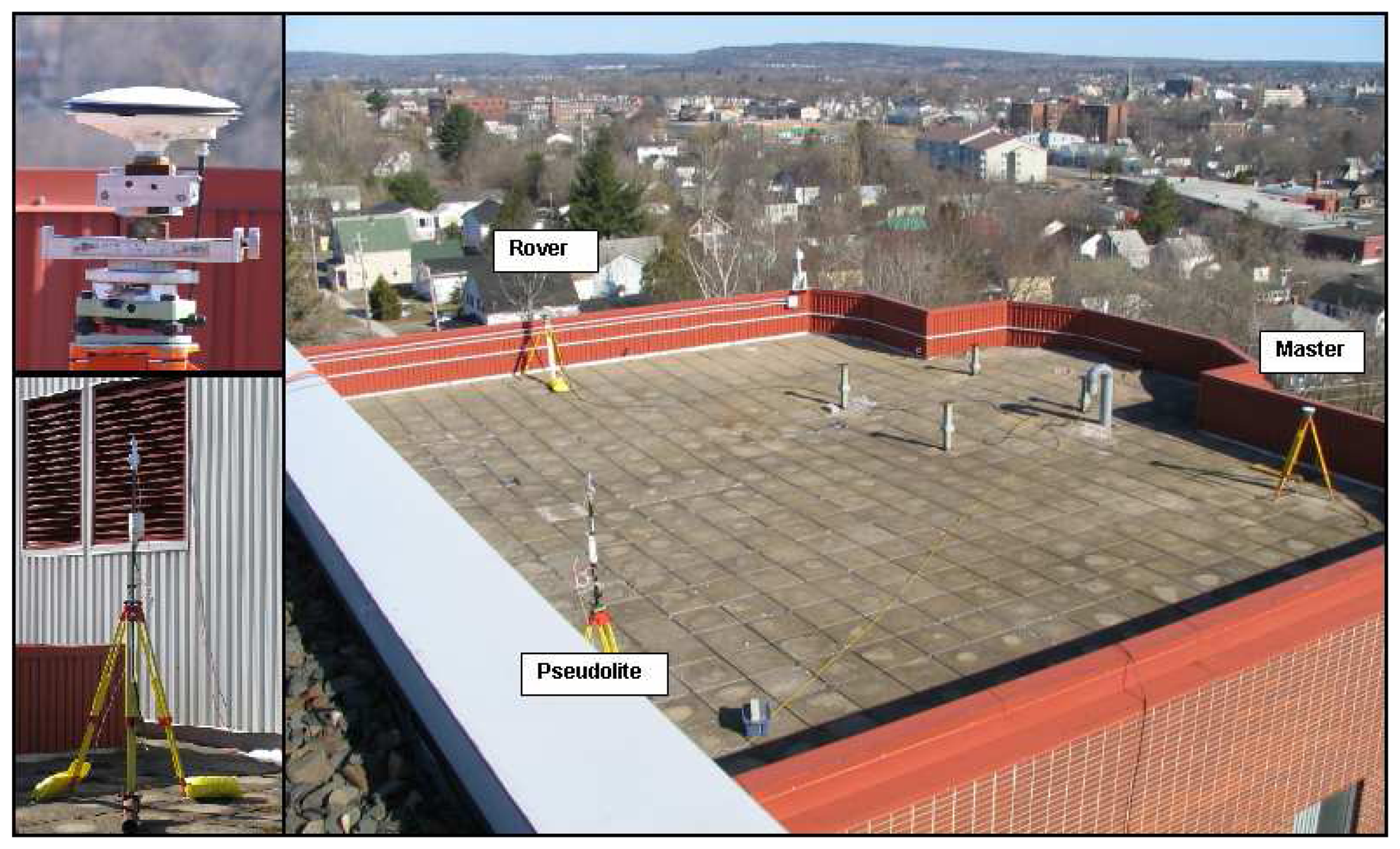
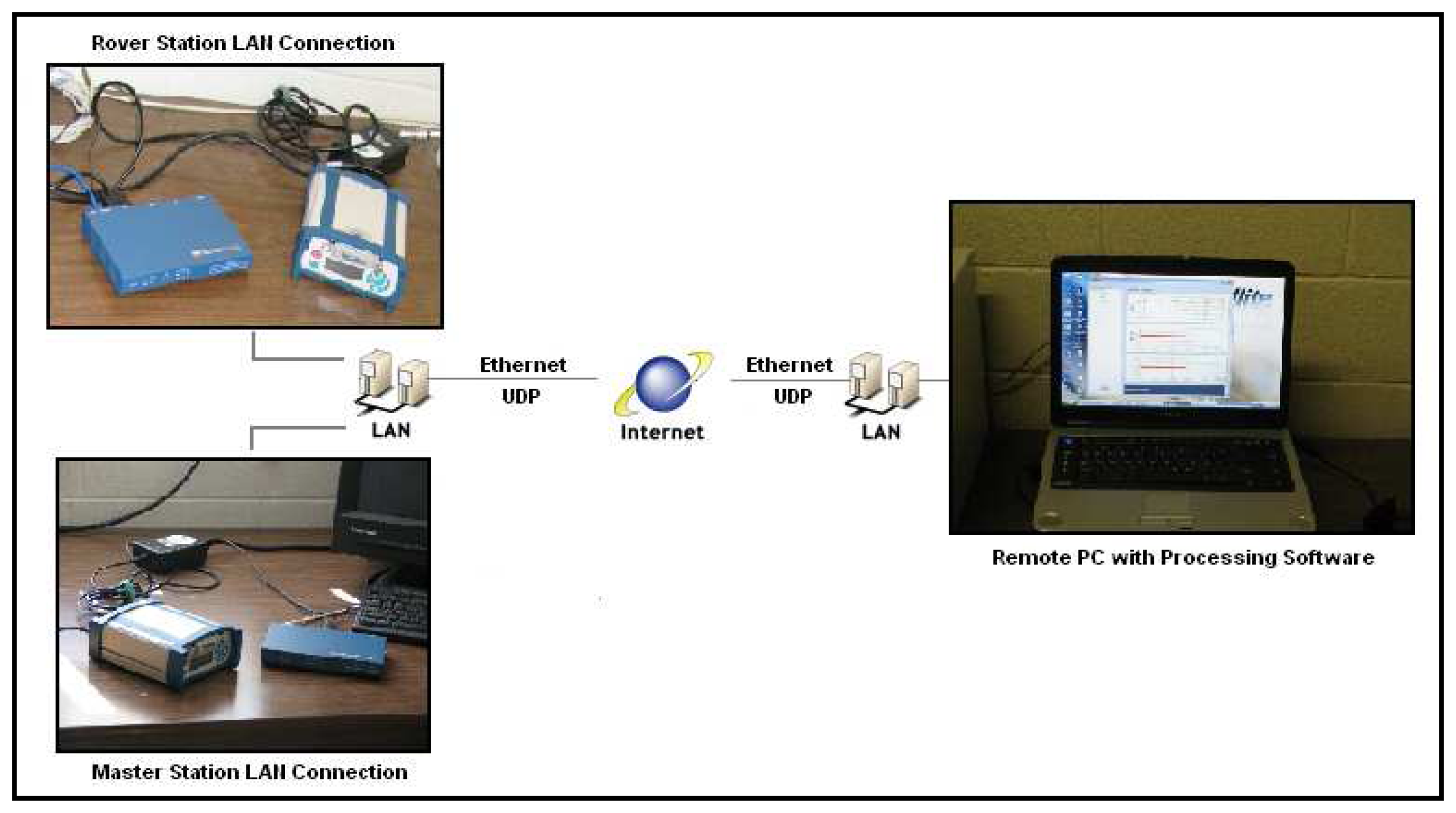
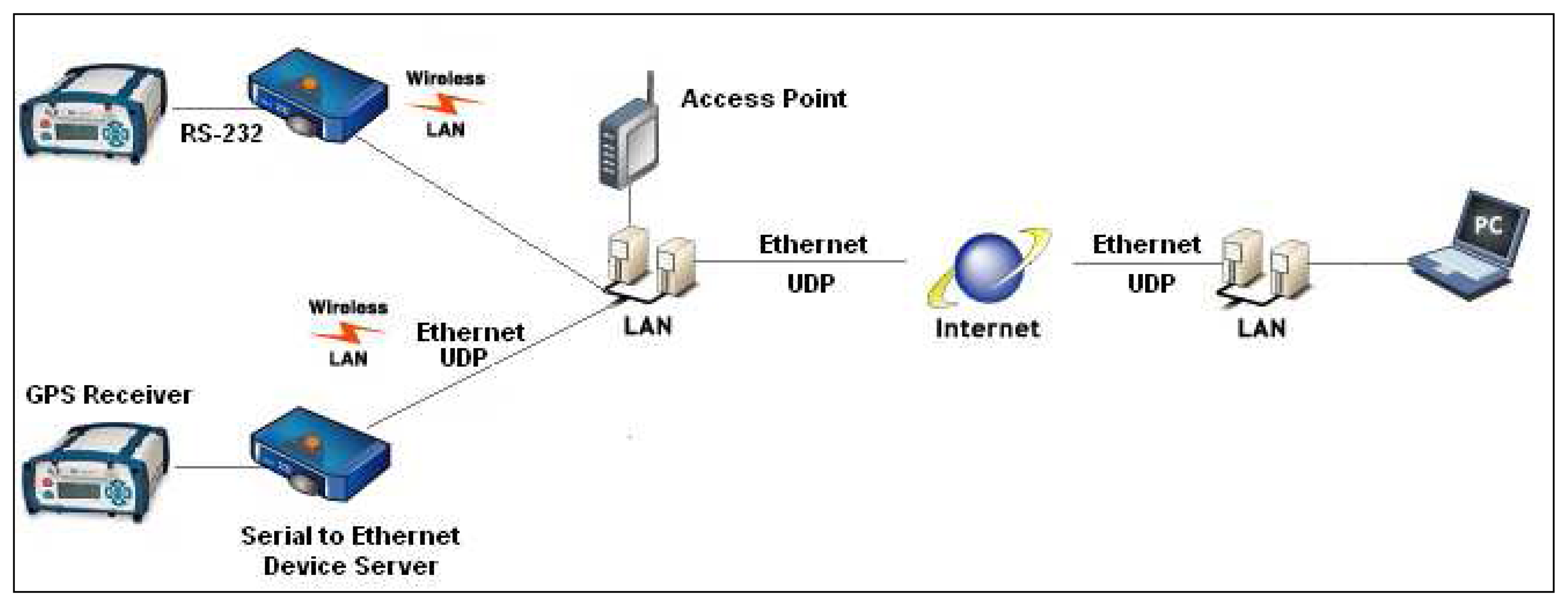
3.4.1. Monitoring System Infrastructure
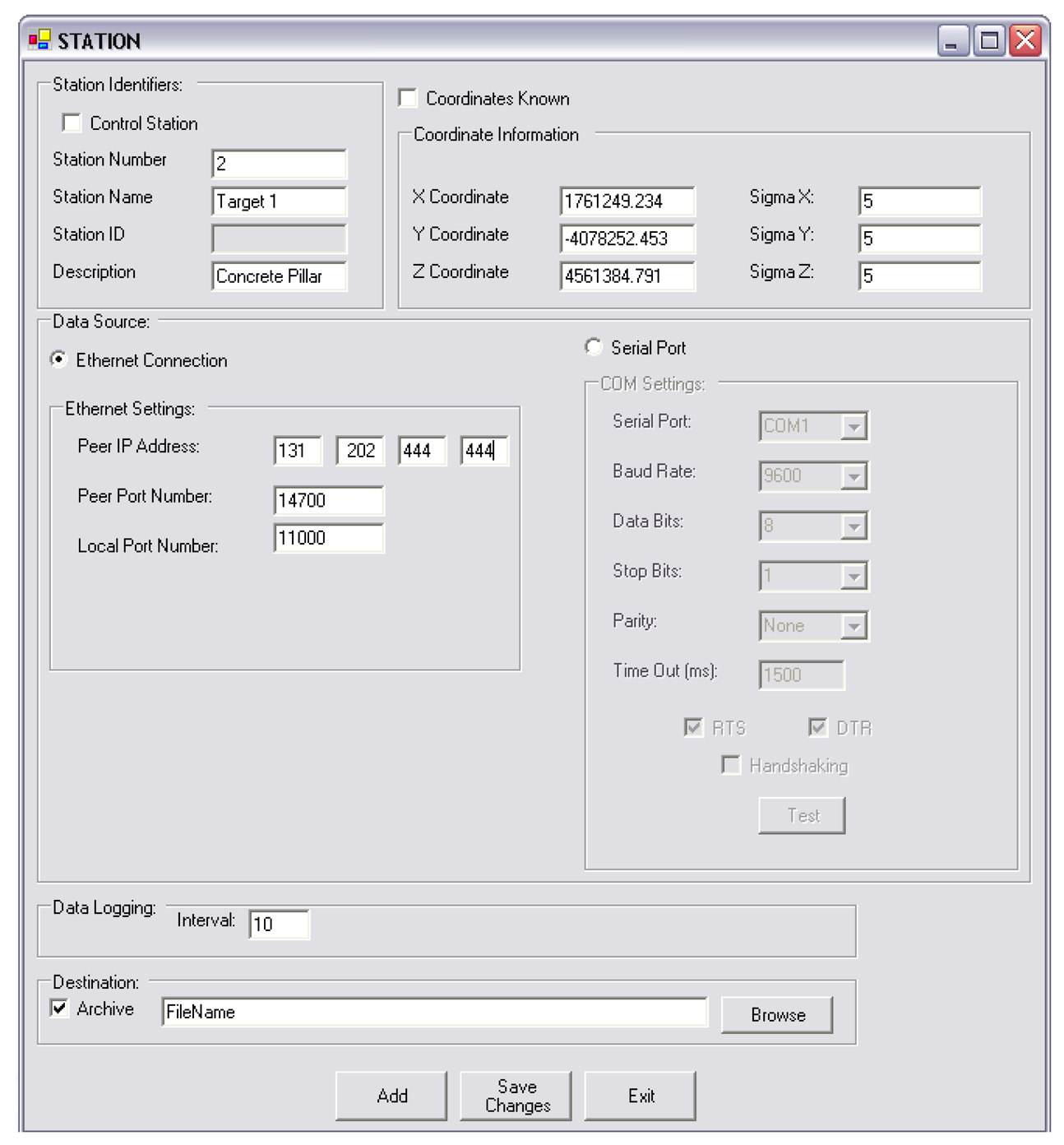
3.4.2. PPMS Modifications
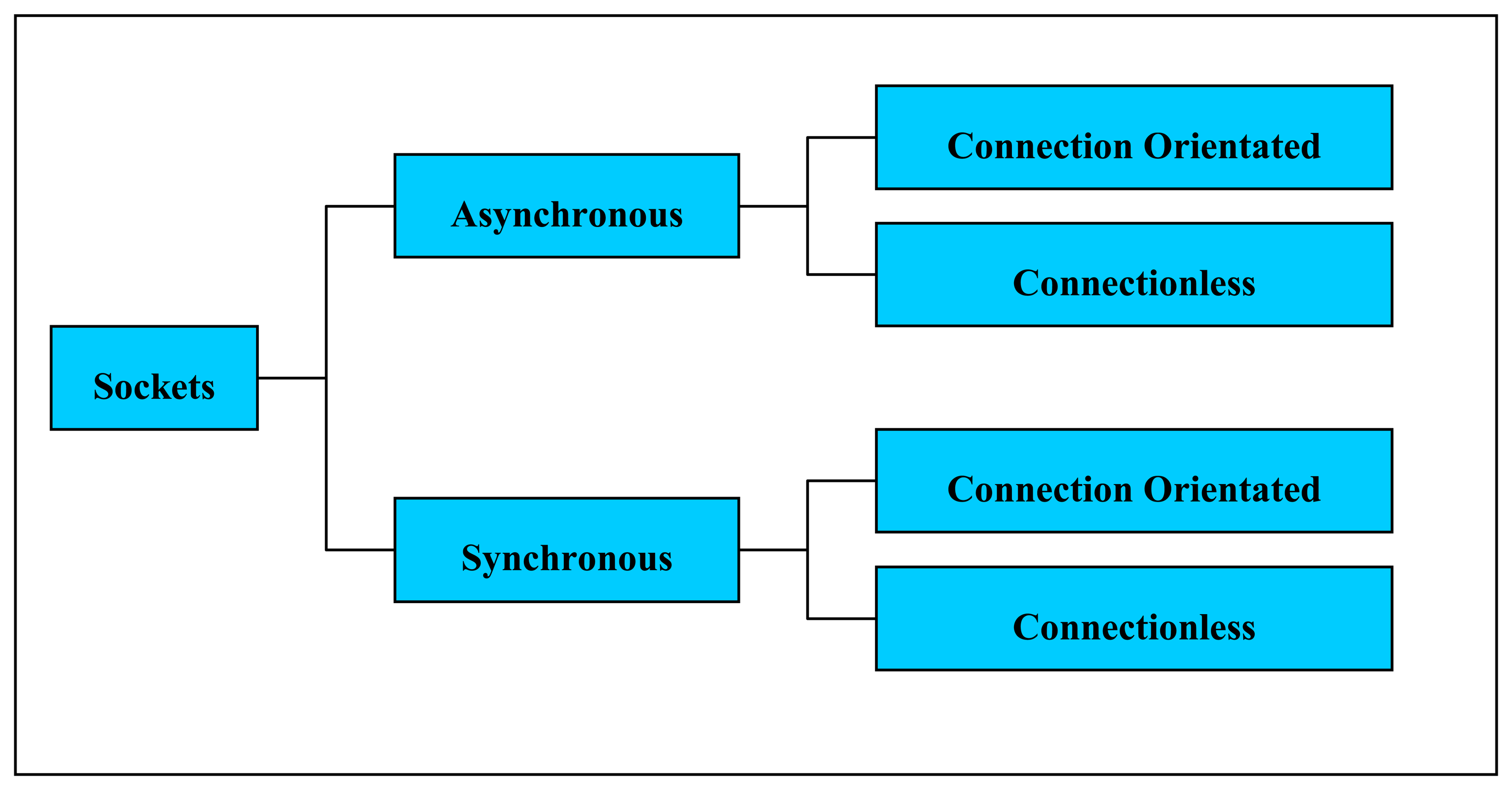
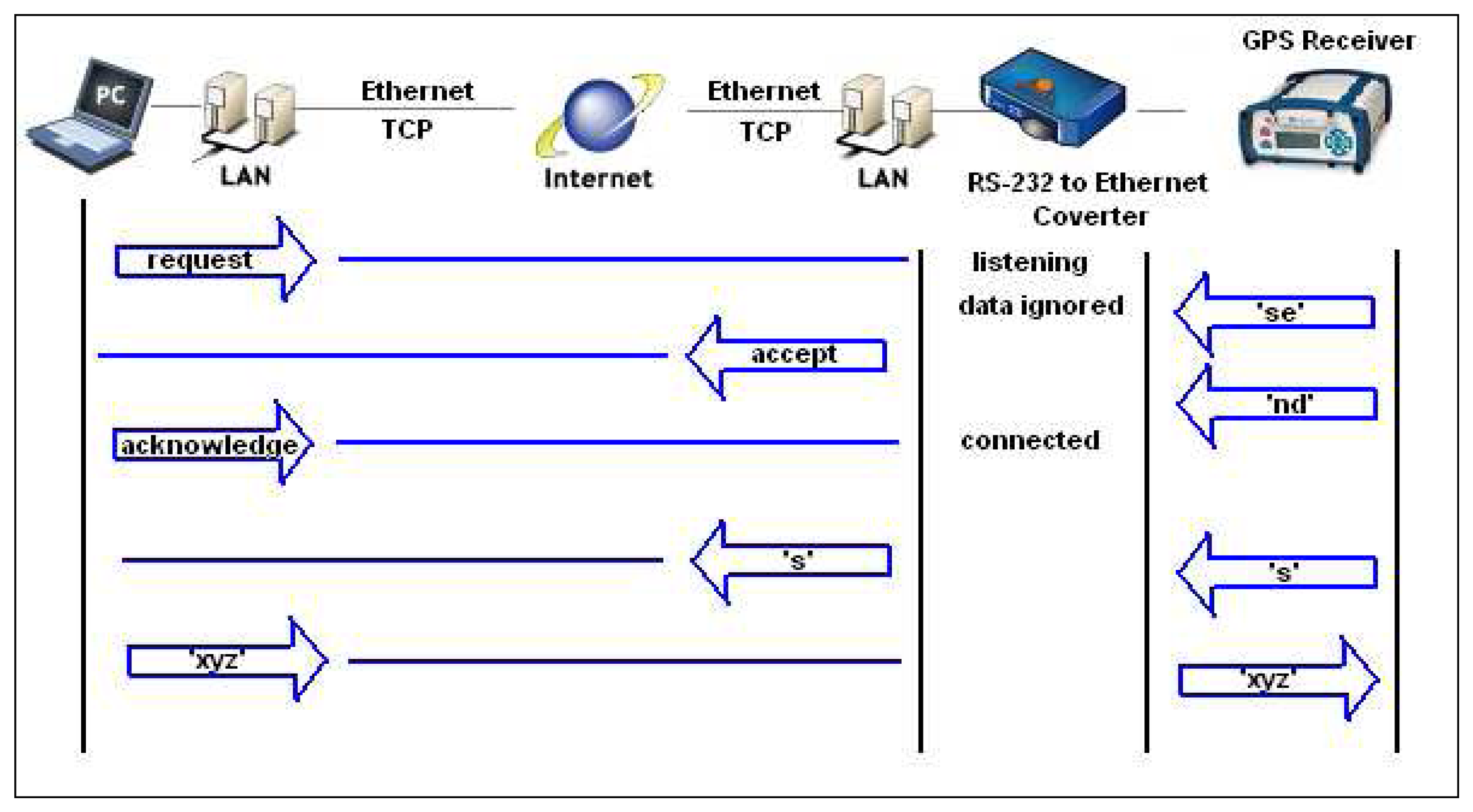
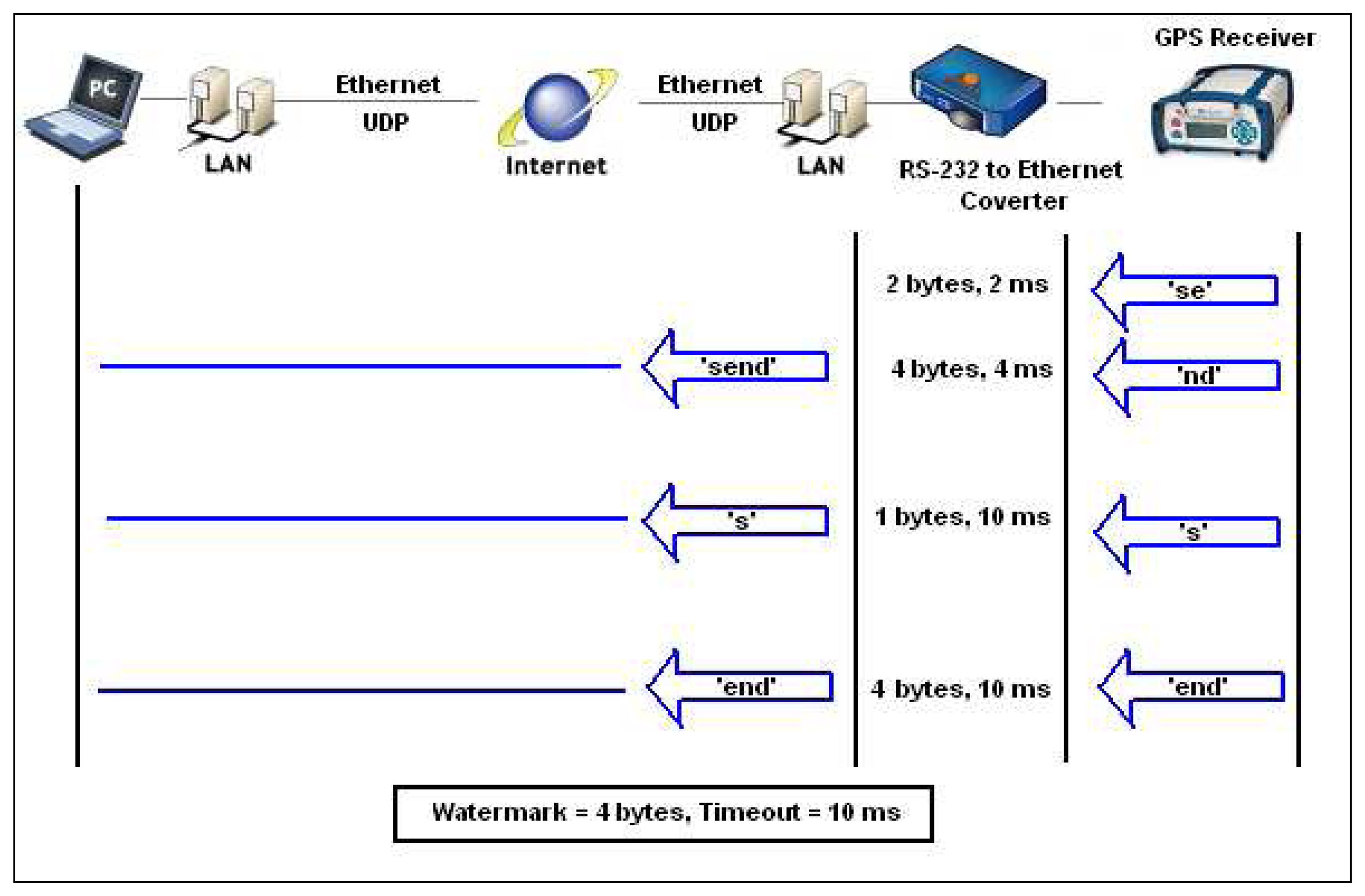
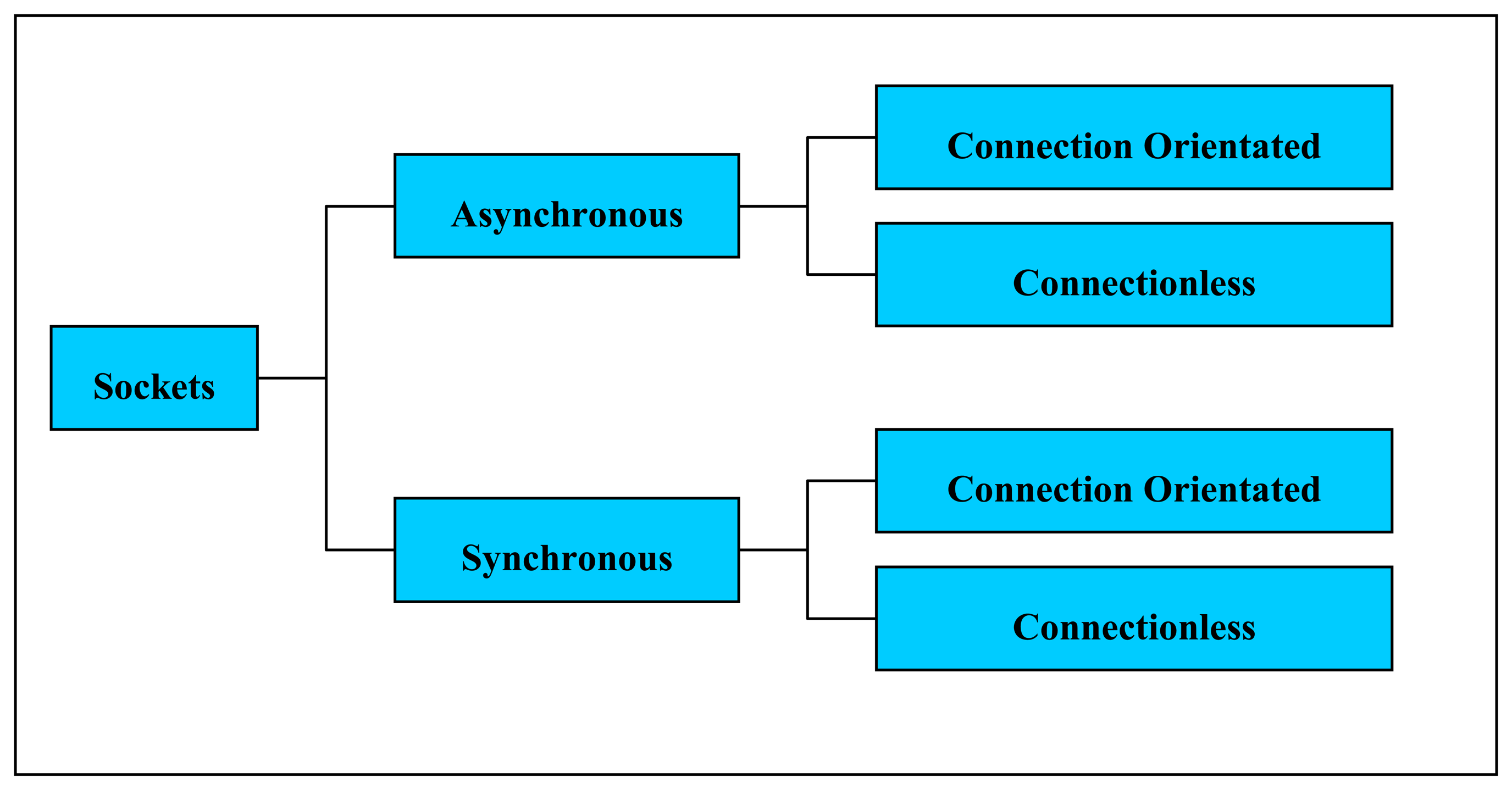
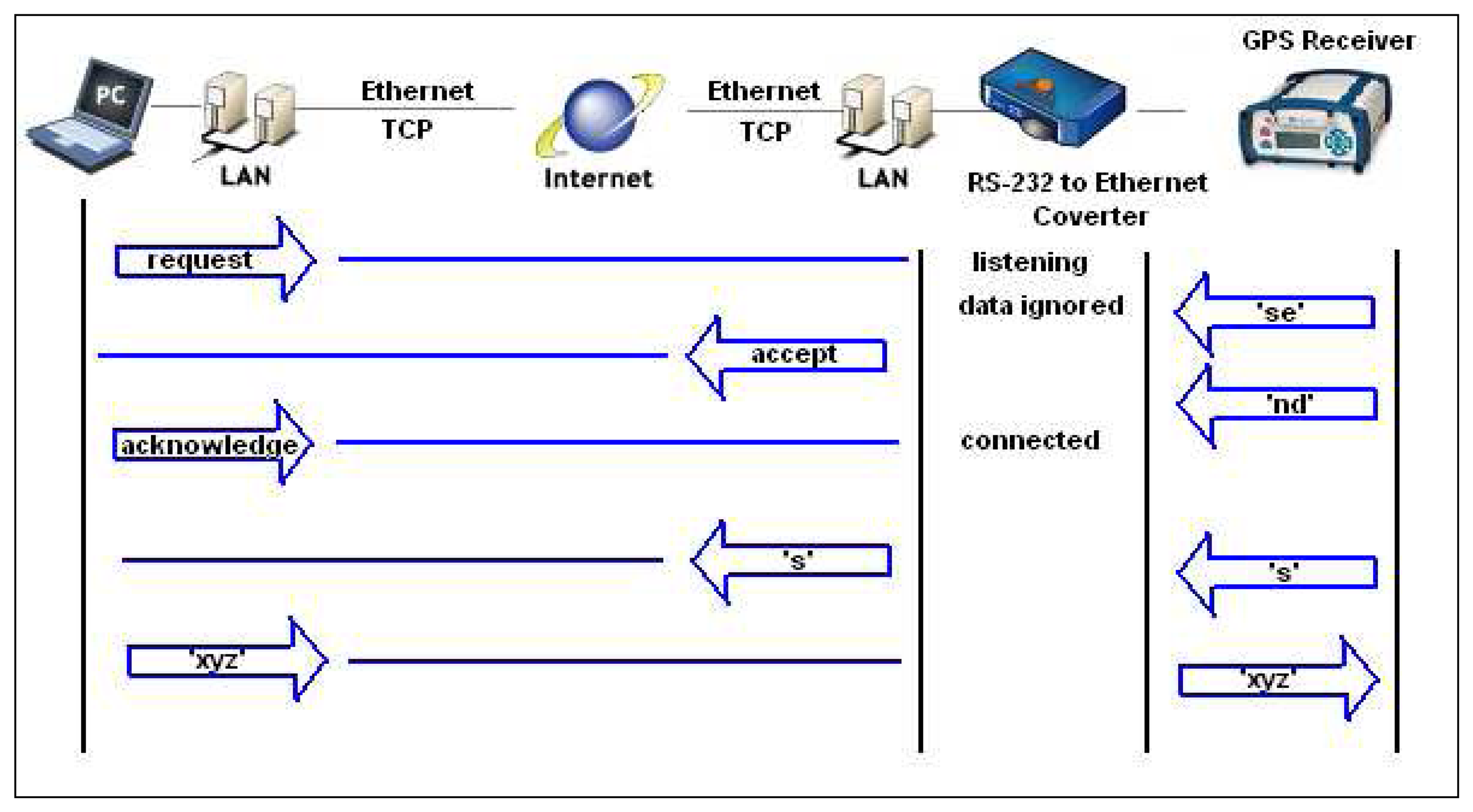
3.4.3. Real-time Implementation
4. Conclusions
Acknowledgments
References
- Bond, J.; Chrzanowski, A.; Wilkins, R. Using GPS for Augmenting Deformation Monitoring Systems in Open Pit Mines- Problems and Solutions. Geomatica 2005, 59(1), 73–82. [Google Scholar]
- Chen, Y.Q.; Zhang, G.; Ding, X.; Li, Z. Monitoring Earth Surface Deformations with InSAR Technology: Principle and Some critical Issues. Journal of Geospatial Engineering 2000, 2(1), 3–21. [Google Scholar]
- Kim, D.; Langley, R.B; Bond, J.; Chrzanowski, A. Local deformation monitoring using GPS in an open pit mine: Initial study. GPS Solutions 2003, 7(3), 176–185, DOI 10.1007/s10291-003-0075-1. [Google Scholar]
- Beutler, G.; Bauersima, I.; Gurtner, W.; Rothacher, M.; Schildknecht, T.; Gieger, A. Atmospheric refraction and other important biases in GPS carrier phase observations. Atmospheric Effects on Geodetic Space Measurements; Monograph 12, School of Surveying; University of New South Wales; pp. 15–43. 1988. [Google Scholar]
- Langley, R.B. Propagation of the GPS Signals. In Chapter 3 of GPS for Geodesy, Proceedings of the International School of GPS for Geodesy, Delft, the Netherlands, March 26 - April 1, 1995.
- Bond, J.; Chrzanowski, A.; Kim, D. Bringing GPS into Harsh Environments for Deformation Monitoring. GPS Solutions. 2007. (in press). Available at: http://www.springerlink.com/content/109380/?sortorder=asc&Content+Status=Accepted.
- Bond, J.; Chrzanowski, A.; Kim, D. Augmenting GPS with Pseudolites for Deformation Monitoring in Harsh Environments. Proceedings of the Institute of Navigation National Technical Meeting(ION NTM), San Diego, CA, USA, 2007, 22-24 January; Available at: http://www.ion.org/ and on CDROM.
- Bond, J.; Szostak-Chrzanowski, A.; Chrzanowski, A. Design of Geodetic Monitoring Schemes Using Deterministic Modelling: An Open Pit Mine Example. Proceedings of the 3rd International Symposium on Geo-information for Disaster Management, Toronto, Ontario, Canada, 22-24 May; Canadian Inst. of Geomatics, 2007. Available on CD-ROM. [Google Scholar]
- Remondi, B.W. Using the Global Positioning System (GPS) Phase Observable for Relative Geodesy: Modeling, Processing, and Results. Doctoral thesis, Center for Space Research, University of Texas at Austin, 1984; pp. 1–324. [Google Scholar]
- Brown, R.G.; Hwang, P.Y.C. Introduction to Random Signals and Applied Kalman Filtering, 3rd ed.; John Wiley & Sons, Inc.: New York, USA; pp. 1–484. 1997. [Google Scholar]
- Sollae Systems Co., Ltd. Products. EZL-400S. Sollae Systems Co., Ltd. website. 2007. http://www.eztcp.com/en/Products/ezl-400s.php accessed on 18 April.
- Microsoft Developer Network (MSDN). System.net.sockets namespace. Microsoft. website. 2007. http://msdn2.microsoft.com/en-us/library/system.net.sockets(vs.71).aspx accessed on 18 April.
- Microsoft Developer Network (MSDN). Using TCP Services. Microsoft. website. 2007. http://msdn2.microsoft.com/en-us/library/k8azesy5.aspx accessed on 19 April.
- Microsoft Developer Network (MSDN). Using UDP Services. Microsoft. website. 2007. http://msdn2.microsoft.com/en-us/library/tst0kwb1.aspx accessed on 19 April.
- Sollae Systems Co., Ltd. Products EZL-400S: User's Manual. Sollae Systems Co., Ltd. website. 2007. http://www.eztcp.com/Support/ezl400sen.pdf accessed on 18 April.
- Novariant. Mining Products. Terralite XPS. Novariant. website. 2007. http://www.novariant.com/mining/products/index.cfm accessed on 21 April.
- Lee, M. Email communication with Technical Support Representative. Sollae Systems Co., Ltd. 2007. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Processing Strategy | Advantages | Disadvantages |
|---|---|---|
| DD Batch Processing |
|
|
| TD Kalman Filter |
|
|
© 2007 by MDPI ( http://www.mdpi.org). Reproduction is permitted for noncommercial purposes.
Share and Cite
Bond, J.; Kim, D.; Chrzanowski, A.; Szostak-Chrzanowski, A. Development of a Fully Automated, GPS Based Monitoring System for Disaster Prevention and Emergency Preparedness: PPMS+RT. Sensors 2007, 7, 1028-1046. https://doi.org/10.3390/s7071028
Bond J, Kim D, Chrzanowski A, Szostak-Chrzanowski A. Development of a Fully Automated, GPS Based Monitoring System for Disaster Prevention and Emergency Preparedness: PPMS+RT. Sensors. 2007; 7(7):1028-1046. https://doi.org/10.3390/s7071028
Chicago/Turabian StyleBond, Jason, Don Kim, Adam Chrzanowski, and Anna Szostak-Chrzanowski. 2007. "Development of a Fully Automated, GPS Based Monitoring System for Disaster Prevention and Emergency Preparedness: PPMS+RT" Sensors 7, no. 7: 1028-1046. https://doi.org/10.3390/s7071028